JP2006183452A - Construction machine management system and construction machine - Google Patents
Construction machine management system and construction machine Download PDFInfo
- Publication number
- JP2006183452A JP2006183452A JP2005334178A JP2005334178A JP2006183452A JP 2006183452 A JP2006183452 A JP 2006183452A JP 2005334178 A JP2005334178 A JP 2005334178A JP 2005334178 A JP2005334178 A JP 2005334178A JP 2006183452 A JP2006183452 A JP 2006183452A
- Authority
- JP
- Japan
- Prior art keywords
- construction machine
- position information
- management system
- information
- transmission
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images












Abstract
Description
本発明は、基地局に位置情報を送信することが可能な建設機械およびその建設機械を用いた管理システムに関する。 The present invention relates to a construction machine capable of transmitting position information to a base station and a management system using the construction machine.
自動車,ダンプ車等の車両の運行状況を管理するシステムとして、例えば、特開平4−174387号公報,特開平4−174388号公報に記載されたものがある。これらの公報に開示されたシステムでは、個々の車両の位置情報がGPS衛星を用いて検知され、その位置情報が随時基地局に送信される。 As a system for managing the operation status of vehicles such as automobiles and dump trucks, for example, there are those described in JP-A-4-174387 and JP-A-4-174388. In the systems disclosed in these publications, position information of individual vehicles is detected using GPS satellites, and the position information is transmitted to the base station as needed.
しかし、位置情報の使用目的によっては基地局においてその位置情報を常時認識する必要はなく、上述のように随時送信する方式では送信コストがいたずらに嵩み、経済的でない。 However, depending on the purpose of use of location information, it is not necessary for the base station to constantly recognize the location information. As described above, the method of transmitting as needed increases the transmission cost and is not economical.
また上記公報に記載されたものは、自動車やダンプ車等の車両の運行距離からその運行稼働時間を管理しようとするものであるが、例えば油圧ショベル等の建設機械は、その管理部署から離れた遠隔地に運搬され、その遠隔地において使用されるのが一般的である。そして作業終了後は、運搬車両による回収作業が面倒であるため、その遠隔地に建設機械を放置しておく場合が多い。このような状況下においては、管理者による建設機械の管理が無防備になり、管理者としては精神的な負担を強いられることになる。 Moreover, what is described in the above publication is intended to manage the operation operating time from the operation distance of a vehicle such as an automobile or a dump truck. For example, construction machines such as a hydraulic excavator are away from the management department. It is common to be transported to a remote location and used in that remote location. And after the work is completed, since the collection work by the transport vehicle is troublesome, the construction machine is often left in the remote place. Under such circumstances, management of the construction machine by the manager is unprotected, and the manager is forced to bear a mental burden.
さらに、建設機械の管理部署、つまり建設機械のメーカーやレンタル会社においては、供給または提供した建設機械の稼働状況を把握し、被供給者または被提供者に不便を感じさせないようにする管理する必要がある。例えば、建設機械に故障が生じた場合、被供給者または被提供者から故障の連絡を受けてからでは故障した建設機械の位置確認、確認後のサービス員の手配等に時間がかかり、作業復帰が遅れる。 In addition, the construction machine management department, that is, the manufacturer or rental company of the construction machine, needs to grasp the operating status of the construction machine supplied or provided and manage it so that the supplier or the recipient does not feel inconvenience. There is. For example, when a failure occurs in a construction machine, it takes time to confirm the location of the failed construction machine and arrange service personnel after confirmation after receiving notification of the failure from the supplier or the recipient. Is delayed.
本発明の目的は、建設機械の位置情報を必要に応じて送信することで送信費の節約を図るとともに、建設機械の被供給者または被提供者にできるだけ不便を感じさせないようにした建設機械および建設機械の管理システムを提供することにある。 An object of the present invention is to reduce the transmission cost by transmitting the position information of the construction machine as necessary, and to prevent the construction machine supplier or the provider from feeling as inconvenient as possible. The purpose is to provide a construction machine management system.
上記の目的を達成するために、本発明に係る建設機械の管理システムは、建設機械の位置情報を検知する位置検知装置と、位置情報を送信すべきか否かを判定し、送信すべきと判断したときに送信信号を出力する判定装置と、送信信号に応答して、そのとき検知された位置情報を基地局に報知すべく送信する送信装置とを有する。
本発明によれば、位置情報を送信すべきか否かを判断する判定装置を設け、送信すべきと判断したときにのみ建設機械からその位置情報が送信されるよう構成したので、位置情報を随時送信する場合と比べて送信コストを低減できる。
操作スイッチの操作の有無を判定し、操作されたときに上記送信信号が出力されるようにしてもよい。建設機械の故障の有無を検出する故障検出装置を更に備え、送信信号の出力時に故障が検出されている場合には、位置情報に加えて故障情報をも送信するようにしてもよい。また、故障検出装置により故障が検出されたときに、位置情報とともに故障情報を送信するようにしてもよい。基地局からの送信指示の有無を判定し、送信指示があったときに送信信号が出力されるよう構成してもよい。建設機械のエンジン始動および停止の有無を判定し、エンジン始動時および停止時に送信信号が出力されるよう構成してもよい。
建設機械のエンジン停止時に検知された位置情報を記憶する記憶装置を備え、エンジン始動時に検知された位置情報と記憶されたエンジン停止時の位置情報とが所定距離以上離れている場合にエンジン始動時の位置情報を送信するようにしてもよい。これによれば、基地局において始動時および停止時の位置情報を比較することで建設機械の位置異常(盗難のおそれがあるか否か)を判断できる。またエンジン停止時に検知された位置情報を記憶するとともに、エンジン始動時に検知された位置情報と記憶された位置情報とが所定距離以上離れている場合にエンジン始動時の位置情報を送信するようにすれば、基地局がその情報をユーザやその他の関係者に送ることで、盗難が発生した場合に迅速に対処できるとともに、盗難そのものの低減に寄与する。
他の発明に係る建設機械の管理システムは、建設機械に設けられ、前記建設機械の位置情報を検知する位置検知装置と、位置検知装置にて検知された位置情報を送信する送信装置と、建設機械に対して遠隔地に設けられ、送信装置からの位置情報に基づいて建設機械の位置に対する異常の有無を判定する判定装置とを備える。
このように建設機械からの位置情報に基づいて建設機械の位置に対する異常の有無を判定するようにしたので、建設機械の位置異常(盗難のおそれ等)が判断でき、然るべき処置をとることで盗難防止に寄与する。
判定装置の判定結果を建設機械の管理部署またはユーザーに例えば電子メール等で伝達するようにしてもよい。
In order to achieve the above object, a construction machine management system according to the present invention determines a position detection device that detects position information of a construction machine, whether or not to transmit position information, and determines whether or not to transmit. A determination device that outputs a transmission signal at the time of transmission, and a transmission device that transmits the position information detected at that time to notify the base station in response to the transmission signal.
According to the present invention, the determination device for determining whether or not the position information should be transmitted is provided, and the position information is transmitted from the construction machine only when it is determined that the position information should be transmitted. The transmission cost can be reduced compared to the case of transmission.
Whether or not the operation switch is operated may be determined, and the transmission signal may be output when the operation switch is operated. A failure detection device that detects whether there is a failure in the construction machine may be further provided, and when a failure is detected when the transmission signal is output, the failure information may be transmitted in addition to the position information. Further, when a failure is detected by the failure detection device, the failure information may be transmitted together with the position information. It may be configured to determine whether there is a transmission instruction from the base station and to output a transmission signal when there is a transmission instruction. The construction machine may be configured to determine whether the engine is started and stopped, and to output a transmission signal when the engine is started and stopped.
A storage device is provided for storing position information detected when the engine of the construction machine is stopped, and the engine is started when the position information detected when the engine is started is separated from the stored position information when the engine is stopped by a predetermined distance or more. The position information may be transmitted. According to this, it is possible to determine the position abnormality of the construction machine (whether there is a possibility of theft) by comparing the position information at the time of start and stop at the base station. Further, the position information detected when the engine is stopped is stored, and the position information at the time of engine start is transmitted when the position information detected at the time of engine start and the stored position information are more than a predetermined distance apart. For example, when the base station sends the information to the user and other related parties, it is possible to quickly cope with theft and to contribute to the reduction of theft itself.
A construction machine management system according to another invention is provided in a construction machine, a position detection device that detects position information of the construction machine, a transmission device that transmits position information detected by the position detection device, and a construction And a determination device that is provided at a location remote from the machine and determines whether there is an abnormality in the position of the construction machine based on position information from the transmission device.
As described above, the presence / absence of abnormality in the position of the construction machine is determined based on the position information from the construction machine. Therefore, the position abnormality of the construction machine (possibility of theft, etc.) can be determined, and theft is taken by taking appropriate measures. Contributes to prevention.
The determination result of the determination device may be transmitted to the management department or user of the construction machine by e-mail or the like, for example.
本発明は、建設機械の位置情報を必要に応じて送信することで送信費の節約を図るとともに、建設機械の被供給者または被提供者にできるだけ不便を感じさせないようにした建設機械および建設機械の管理システムを提供することができる。 The present invention is directed to a construction machine and a construction machine in which position information of the construction machine is transmitted as necessary so as to save transmission costs and to make the construction machine supplier or recipient not feel as inconvenient as possible. Management system can be provided.
−第1実施形態−
図1〜図3により本発明を油圧ショベルの管理システムに適用した場合の一実施形態を説明する。
-First embodiment-
An embodiment in which the present invention is applied to a hydraulic excavator management system will be described with reference to FIGS.
図1は本発明に係るシステムの概略構成図である。個々の油圧ショベル10に搭載されたGPSコントロールユニット11は、複数のGPS衛星21からの電波を受信して各油圧ショベル10(自車両)の位置情報を演算する。演算された位置情報はメインコントロールユニット12に入力される。ここでの位置情報は例えば経緯度情報である。またメインコントロールユニット12には、運転室に設けられた送信操作スイッチSW1と、油圧ショベル10の故障を検出する故障検出装置13とが接続されている。送信操作スイッチSW1は、オペレータが位置情報等を送信したいときに操作するスイッチである。故障検出装置13は、油圧ショベル10の各種異常をその種類ごとに検出し、その検出結果をメインコントロールユニット12に入力する。故障の内容としては、例えば各センサの電圧の異常、エンジン回転数異常、エンジン油圧異常、バッテリチャージ異常、冷却水温異常、ブーム上げ操作量異常、走行操作量異常など種々のものがある。
FIG. 1 is a schematic configuration diagram of a system according to the present invention. A
メインコントロールユニット12は、入力された位置情報や故障情報を送信する送信部12Aおよび位置情報を記憶するメモリ12Bを有する。送信部12Aから送信された情報は、通信衛星22を介して地上側の管理サーバに送られる。本実施形態では、この管理サーバとして例えばメールサーバ30を用いている。なお送信情報は、上述した位置情報や故障情報の他に油圧ショベル10の稼働状況を示す情報など種々の情報がある。
The
油圧ショベル10に対して遠隔地に位置する基地局(例えば建設機械会社の本社あるいは支社)40には、センタサーバ41が設置される。センターサーバ41は、上記メールサーバ30から転送された情報を取り込んだり、これらの情報を処理したり、必要に応じてユーザ50やサービス部門60の各端末機51,61に通信回線、例えば電話回線を介してメール等で情報を送信することが可能である。
A
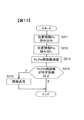
次に、図2および図3のフローチャートを参照して情報送受信処理の具体例を説明する。図2は油圧ショベル10のメインコントロールユニット12による処理を示すフローチャートである。
Next, a specific example of the information transmission / reception process will be described with reference to the flowcharts of FIGS. FIG. 2 is a flowchart showing processing by the
ステップS1で送信操作スイッチSW1が操作されたか否かが判定される。操作されたと判断されると、GPSコントロールユニット11から油圧ショベル10の位置情報が読み込まれる(ステップS2)とともに、故障検出装置13から故障の有無が入力される(ステップS3)。読み込まれる位置情報は、操作スイッチSW1がオンされた時点の位置情報である。
In step S1, it is determined whether or not the transmission operation switch SW1 has been operated. If it is determined that it has been operated, the position information of the
ステップS4では、故障検出装置13からの入力情報に基づいて故障の有無が判定される。故障有りと判定された場合には、送信部12Aから上記位置情報および故障情報が送信され(ステップS5)、故障なしと判定した場合には位置情報のみが送信される(ステップS6)。故障情報は異常が発生している個所を示すもので、これは、例えばセンサ異常であれば「01」、エンジン回転数異常であれば「02」のように予め設定したコード番号で送信される。
In step S4, the presence / absence of a failure is determined based on the input information from the
送信された情報は、上述したように通信衛星22を介してメールサーバ30に送られ、メールサーバ30から基地局40に情報が転送されてくる。図3は基地局40のセンタサーバ41における処理を示している。ステップS11でメールサーバ30から情報が送られてきたか否かが判定され、情報が送られてきたと判定された場合には、その情報が読み込まれる(ステップS12)。この読み込まれた位置情報および故障情報がサービス部門60の端末機61に送信される。
The transmitted information is sent to the
サービス部門60は、端末機61が受信した位置情報に基づいて油圧ショベル10の位置を把握し、サービス員をその油圧ショベル10のある現場に派遣する。故障情報も併せて受信している場合には、その故障情報に基づいて故障内容が把握できるので、サービス員はその故障を修理するための設備を携えて現場に向かう。これによれば、故障発生から短時間で修理が行え、作業の遅滞を最小限に抑制できる。
The
故障情報は必ずしも必要ではない。例えば油圧ショベル10が転倒したときなどにオペレータが送信操作スイッチSW1を操作すると、送信された位置情報が基地局40を介してサービス部門60に伝達される。この情報伝達によりサービス員を短時間のうちに現場に到着させることができ、速やかに復帰の措置をとることができる。
Failure information is not always necessary. For example, when the operator operates the transmission operation switch SW1 when the
あるいは、燃料残量が少なくなったときに送信操作スイッチSW1を操作することで、燃料補給を速やかに行うことができる。例えば、送信操作スイッチSW1を操作したときに油圧ショベル10側で燃料残量を確認し、少ないときにはその旨の情報を位置情報とともに送信すれば、より迅速な対応が可能となる。
Alternatively, fuel can be replenished quickly by operating the transmission operation switch SW1 when the fuel remaining amount is low. For example, if the remaining amount of fuel is confirmed on the
このように本実施形態では、オペレータのスイッチ操作に伴って位置情報を送信するようにしたので、位置情報を随時送信する場合と比べて通信コストが節約できる。 As described above, in this embodiment, since the position information is transmitted in accordance with the switch operation of the operator, the communication cost can be saved as compared with the case where the position information is transmitted as needed.
なお、本実施形態ではスイッチSW1の操作により情報を送信するようにしたが、故障の発生を検出したときにその故障情報と位置情報とを送信するようにしてもよい。これにより故障発生とほぼ同時にその情報が基地局40およびサービス部門60へ送られ、故障に対する迅速な対応が可能となる。したがって、故障による作業の停滞を最小限の時間に抑えることができる。
In the present embodiment, the information is transmitted by operating the switch SW1, but the failure information and the position information may be transmitted when the occurrence of the failure is detected. As a result, the information is sent to the
−第2実施形態−
図4〜図7により本発明の第2の実施形態を説明する。本実施形態では、油圧ショベル10のエンジン停止時と始動時とで油圧ショベル10の位置が異なる場合に油圧ショベル10が盗難されたおそれがあると判断され、エンジン始動時の位置情報が送信される。システム構成は図1と同様とする。
-Second Embodiment-
A second embodiment of the present invention will be described with reference to FIGS. In the present embodiment, it is determined that the
図4は油圧ショベル10のメインコントロールユニット12におけるエンジン停止時の処理を示す。ステップS31において、例えばエンジンキーのオフ信号等によりエンジン停止と判断すると、GPSコントロールユニット11からその時点の位置情報が読み込まれる(ステップS32)、読み込まれた情報は位置情報P1としてメモリ12Bに記憶される(ステップS33)。これによれば、エンジン始動時には必ず前回エンジンを停止したときの位置情報がメモリ12Bに記憶されていることになる。
FIG. 4 shows processing when the engine is stopped in the
図5はメインコントロールユニット12におけるエンジン始動時の処理を示す。まずGPSコントロールユニット11からその時点の位置情報が読み込まれ、この情報が位置情報P2とされる(ステップS41)。メモリ12Bに記憶されている情報、すなわち前回エンジン停止時の位置情報P1が読み出され(ステップS42)、P1,P2間の距離が予め設定された所定距離ΔLと比較される(ステップS43)。P1,P2間の距離が所定距離ΔL以上の場合、すなわちエンジン停止時と始動時とで油圧ショベル10の位置が所定距離以上離れている場合には、油圧ショベル10の位置が異常である(盗難のおそれがある)と判断され、現在の位置情報P2が送信される(ステップS44)。その際、盗難のおそれがある旨の情報を併せて送信するようにしてもよい。
FIG. 5 shows processing at the time of engine start in the
図6は基地局40のセンタサーバ41における処理を示している。ステップS51で位置情報の有無が判定され、位置情報がある場合にはその位置情報が送られてきたか否かが判定され、送られてきた場合にはその位置情報が読み込まれる(ステップS52)。読み込まれた情報はユーザ50側にメール等で報知される(ステップS53)。
FIG. 6 shows processing in the
図7はユーザ50側の端末機51における処理の一例を示している。ステップS61でメール着信と判断されると、そのメールを読み込むことで油圧ショベル10の位置情報が把握される(ステップS62)。予めユーザ側で作成されている工程管理データが読み込まれ(ステップS63)、異常の有無が判断される(ステップS64)。例えば、送信されてきた位置情報が工程管理データにおける位置と大きく異なる場合には異常と判断され、その旨の情報が端末機61の画面上に表示される(ステップS65)。この異常情報が表示された場合には、担当者は関係者に連絡をとったり、場合によっては警察等に通報する。これによれば、油圧ショベル10の盗難があった場合でも速やかに回収することができる。またこのようなシステムを広めることで盗難そのものを激減できる。さらに盗難のおそれがあるときにのみ位置情報が送信されるので、送信コストの節減が図れる。
FIG. 7 shows an example of processing in the terminal 51 on the
以上では、エンジン停止時および始動時の位置情報をショベル側で比較するようにしたが、その比較は基地局側で行ってもよい。すなわち、ショベル側は単にエンジン停止時の位置情報P1とエンジン始動時の位置情報P2とをその都度送信するようにし、それらの情報を基地局側で比較して盗難のおそれがあるか否かを判断するようにしてもよい。 In the above, the position information when the engine is stopped and when the engine is started is compared on the shovel side, but the comparison may be performed on the base station side. That is, the shovel side simply transmits the position information P1 when the engine is stopped and the position information P2 when the engine is started, and compares the information on the base station side to determine whether or not there is a possibility of theft. You may make it judge.
また他の実施形態として、例えば基地局40側から油圧ショベル10に情報を送信可能に構成し、基地局40からの送信指示を油圧ショベル10のメインコントロールユニット12が受信すると、そのときの位置情報が送信されるようにしてもよい。これは、例えば基地局40あるいはユーザ側で特定の油圧ショベルの位置を知る必要が生じた場合に便利である。
In another embodiment, for example, information can be transmitted from the
−第3の実施形態−
図8〜図11により本発明の第3の実施形態を説明する。本実施形態も第2の実施形態と同様に油圧ショベル10の盗難防止を図るものである。
-Third embodiment-
A third embodiment of the present invention will be described with reference to FIGS. This embodiment is also intended to prevent the
図8は本実施形態における構成図であり、図1と同様の構成要素には同一の符号を付す。基地局40のセンターサーバ41は、必要に応じて建設機械のレンタル会社70の端末機71に通信回線、例えば電話回線を介して電子メール等で情報を送信することが可能である。また、レンタル会社70の端末71と、そのレンタル会社70の建設機械を使用しているユーザー50の端末51との情報通信も可能とされる。その他の構成は図1と同様である。
FIG. 8 is a configuration diagram in the present embodiment, and the same components as those in FIG. 1 are denoted by the same reference numerals. The
建設機械の管理部署の1つである基地局40は、ユーザー50が油圧ショベル10等の建設機械の作業現場を登録するサービスをそのWebサイト上で行う。例えば、ユーザー50が端末機51を用いて基地局40の所定のWebサイトにアクセスすると、全国を複数のエリアに分割したマップが画面上に表示される。ユーザー50が自社で使用している建設機械の作業現場を含むエリアをクリックすると、そのエリアが作業エリア情報として基地局40に送信される。
The
なお、マップを用いずに、ユーザー50が州名や地域名を入力あるいは複数候補の中から選択して作業エリアを指定する方法でも良い。
Instead of using a map, the
基地局40のセンタサーバ41は、図9に示すように、ユーザー50から作業エリア情報が送信されたことを確認すると(ステップS101)、その作業エリア情報をそのユーザー50に対応付けてデータベースに登録する(ステップS102)。
As shown in FIG. 9, when the
図10は基地局40のセンタサーバ41による他の処理を示している。図6で説明したと同様に、ステップS51で油圧ショベル10から位置情報が送られてきたか否かが判定され、送られてきた場合にはその位置情報が読み込まれる(ステップS52)。次に、当該油圧ショベル10を使用しているユーザー50に対応する作業エリア情報がデータベースに格納されているか否かが判定される(ステップS111)。作業エリア情報が格納されている場合には、その作業エリア情報と上記位置情報とに基づいて、当該油圧ショベル10が当該作業エリア内に存在するか否かが判定される(ステップS112)。作業エリア内に存在しない場合には、油圧ショベル10の位置が異常である(盗難されたおそれがある)と判断され、その旨がユーザー50または建設機械の他の管理部署であるレンタル会社70、あるいは双方に電子メール等で通知される(ステップS113)。またこのとき、油圧ショベルの位置情報も同時に通知される。レンタル会社70のみに通知された場合には、レンタル会社70からユーザー50に通知するようにすればよい。
FIG. 10 shows another process performed by the
上記ステップS113での通知に同期して、油圧ショベル10のエンジンを停止する旨の信号を、メールサーバ30および通信衛星22を介して油圧ショベル10に送信するようにしてもよい。この場合、油圧ショベル10のメインコントロールユニット12は、例えば図11のような処理を行う。図11において、エンジン停止の旨の信号を受信したか否かを判定し(ステップS121)、受信した場合には強制的にエンジンを停止させる(ステップS122)。
A signal to stop the engine of the
一方、図10のステップS111において、作業エリア情報が格納されていないと判断された場合には、油圧ショベル10の位置情報がユーザー50あるいはレンタル会社70に通知される(ステップS114)。この場合は盗難の有無をユーザー50あるいはレンタル会社側で判断することになる。
On the other hand, if it is determined in step S111 in FIG. 10 that the work area information is not stored, the position information of the
なお、上記図11と同等の処理をレンタル会社70にて行うようにしてもよい。この場合には、基地局40から上記作業エリア情報がレンタル会社70に伝達されるようにしてもよいし、あるいはレンタル会社が作業エリア情報の登録サービスを行ってもよい。
Note that the
本実施形態では、ユーザー50に対応する作業エリア情報と位置情報の比較および異常判定をセンタサーバ41で行う構成としたが、予め作業エリア情報を油圧ショベル10に搭載したコントロールユニット12に送信し、この作業エリア情報をコントロールユニット12のメモリ部に記憶させ、上記作業エリア情報と位置情報の比較および異常判定をコントロールユニット12で行うようにしてもよい。その場合、異常と判定したときに、異常であることを位置情報とともにセンタサーバ41に送信する。このような構成を採用することにより、油圧ショベル10を停止させるか否かの判定をコントロールユニット12内で行うことができ、例えば通信状態が悪く位置情報を遅れない場合であっても油圧ショベル10の盗難を防止することができる。
In the present embodiment, the
−第4の実施形態−
図8,図12,図13により本発明の第4の実施形態を説明する。本実施形態は、盗難のおそれがあるか否かを油圧ショベル側で判断するようにしたものである。図8において、油圧ショベル10に設けられたスイッチSW2は、現在の油圧ショベル10の位置を記憶するために操作される操作スイッチである。
-Fourth Embodiment-
A fourth embodiment of the present invention will be described with reference to FIGS. In the present embodiment, the hydraulic excavator side determines whether or not there is a possibility of theft. In FIG. 8, a switch SW <b> 2 provided in the
図12に示すように、油圧ショベル10のメインコントロールユニット12は、スイッチSW2のオン(ステップS201)に伴って油圧ショベル10の現在の位置情報Pmをメモリ12Bに格納する(ステップS202)。オペレータは、例えば作業開始時あるいは終了時にこのスイッチSW2を操作して位置情報Pmを記憶させる。
As shown in FIG. 12, the
図13はメインコントロールユニット12による他の処理を示す。この処理は所定時間周期で繰り返し実行されるものである。
FIG. 13 shows another process by the
GPSコントロールユニット11から油圧ショベル10の現在の位置情報Pcが読み込まれる(ステップS211)とともに、メモリ12Bに格納された位置情報Pmが読み出される(ステップS212)。Pc,Pm間の距離が求められ(ステップS213)、この距離が所定距離以上か否かが判断される(ステップS214)。所定距離以上の場合には盗難のおそれありと判断され、送信部12Aを介して位置情報Pcおよび盗難のおそれがある旨の情報が送信される(ステップS215)。基地局40は、これらの情報を受信すると、上述と同様にユーザー50あるいはレンタル会社70に電子メールで通報する。
The current position information Pc of the
ここで、油圧ショベル10が盗難にあった場合に、盗難者がスイッチSW2を操作すると盗難の有無が正確に判定できなくなるので、スイッチSW2は目立たない箇所に設置するのが望ましい。
Here, when the
本実施形態においても盗難のおそれの有無を基地局40あるいはレンタル会社70で判断するようにしてもよい。この場合には、上記スイッチSW2が操作されたときにそのときの位置情報が送信されるようし、これを基地局40あるいはレンタル会社70の記憶装置に位置情報Pmとして記憶させておく。そして、定期的に油圧ショベル10から送られてくる位置情報Pcと位置情報Pmとを比較し、上述と同様の盗難の有無を判定する。
Also in this embodiment, the
以上の実施形態では、GPS衛星を用いて油圧ショベルの位置を検知するようにしたが、これに代えて例えばPHSの位置情報提供サービス等を利用してもよい。 In the above embodiment, the position of the excavator is detected using a GPS satellite, but instead of this, for example, a PHS position information providing service or the like may be used.
以上では、油圧ショベルの管理システムについて説明したが、油圧ショベル以外の建設機械(例えば、クレーン等)の管理システムにも本発明を適用できる。 In the above, the management system of the hydraulic excavator has been described, but the present invention can also be applied to a management system of a construction machine (for example, a crane) other than the hydraulic excavator.
上記では、種々の実施の形態および変形例を説明したが、本発明はこれらの内容に限定されるものではない。本発明の技術的思想の範囲内で考えられるその他の態様も本発明の範囲内に含まれる。 Although various embodiments and modifications have been described above, the present invention is not limited to these contents. Other embodiments conceivable within the scope of the technical idea of the present invention are also included in the scope of the present invention.
Claims (19)
前記建設機械は、当該建設機械の位置情報を検知する位置検知装置と、前記位置情報を送信すべきか否かを判定し、送信すべきと判断したときに送信信号を出力する判定装置と、前記送信信号に応答して、そのとき検知された前記位置情報を基地局に報知すべく送信する送信装置とを有することを特徴とする建設機械の管理システム。 A management system for receiving information transmitted from a construction machine by a receiving device provided in a base station,
The construction machine determines a position detection device that detects position information of the construction machine, a determination device that determines whether or not to transmit the position information, and outputs a transmission signal when it is determined that the transmission should be performed, and A construction machine management system comprising: a transmission device that transmits a signal to notify the base station of the position information detected at that time in response to a transmission signal.
オペレータが操作可能な操作スイッチを有し、前記判定装置は前記操作スイッチの操作の有無を判定し、操作されたときに前記送信信号を出力することを特徴とする建設機械の管理システム。 In the construction machine management system according to claim 1,
A construction machine management system comprising an operation switch operable by an operator, wherein the determination device determines whether or not the operation switch is operated, and outputs the transmission signal when operated.
建設機械の故障の有無を検出する故障検出装置を更に有し、前記送信装置は、前記送信信号の出力時に故障が検出されている場合には、前記位置情報に加えて故障情報をも送信することを特徴とする建設機械の管理システム。 The construction machine management system according to claim 2,
The apparatus further includes a failure detection device that detects whether there is a failure in the construction machine, and the transmission device also transmits failure information in addition to the position information when a failure is detected when the transmission signal is output. A construction machine management system characterized by that.
建設機械の故障の有無を検出する故障検出装置を更に有し、前記判定装置は、前記故障検出装置によって故障が検出されたか否かを判定し、故障が検出されたときに前記送信信号を出力し、前記位置情報に加えて故障情報をも送信することを特徴とする建設機械の管理システム。 In the construction machine management system according to claim 1,
The apparatus further includes a failure detection device that detects whether there is a failure in the construction machine, and the determination device determines whether a failure is detected by the failure detection device, and outputs the transmission signal when the failure is detected. And a construction machine management system which transmits failure information in addition to the position information.
前記判定装置は、前記基地局からの送信指示の有無を判定し、送信指示があったときに前記送信信号を出力することを特徴とする建設機械の管理システム。 In the construction machine management system according to claim 1,
The determination apparatus determines whether or not there is a transmission instruction from the base station, and outputs the transmission signal when there is a transmission instruction.
前記判定装置は、建設機械のエンジン始動および停止の有無を判定し、エンジン始動時および停止時に前記送信信号を出力することを特徴とする建設機械の管理システム。 In the construction machine management system according to claim 1,
The determination apparatus determines whether or not the construction machine has been started and stopped, and outputs the transmission signal when the engine is started and stopped.
建設機械のエンジン停止時に検知された前記位置情報を記憶する記憶装置を備え、前記判定装置は、エンジン始動時に検知された前記位置情報と前記記憶されたエンジン停止時の位置情報とが所定距離以上離れている場合に前記エンジン始動時の位置情報を送信すべく前記送信信号を出力することを特徴とする建設機械の管理システム。 In the construction machine management system according to claim 1,
A storage device that stores the position information detected when the engine of the construction machine is stopped is provided, and the determination device is configured such that the position information detected when the engine is started and the stored position information when the engine is stopped are a predetermined distance or more. A construction machine management system that outputs the transmission signal to transmit position information at the time of starting the engine when the engine is separated.
前記基地局に設けられ、前記受信装置が受信した位置情報を他の機関へ送信する基地局側送信装置を更に備えることを特徴とする建設機械の管理システム。 In the construction machine management system according to any one of claims 1 to 7,
A construction machine management system, further comprising: a base station-side transmitting device that is provided in the base station and transmits position information received by the receiving device to another organization.
前記位置検知装置にて検知された位置情報を送信する送信装置と、
前記建設機械に対して遠隔地に設けられ、前記送信装置からの位置情報に基づいて前記建設機械の位置に対する異常の有無を判定する判定装置とを備えることを特徴とする建設機械の管理システム。 A position detection device provided in a construction machine for detecting position information of the construction machine;
A transmission device for transmitting position information detected by the position detection device;
A construction machine management system comprising: a determination device that is provided at a remote location with respect to the construction machine, and that determines whether there is an abnormality in the position of the construction machine based on position information from the transmission device.
前記位置検知装置にて検知された位置情報を送信する送信装置と、
前記建設機械に対して遠隔地に設けられ、前記送信装置からの位置情報に基づいて前記建設機械の位置に対する異常の有無を判定する判定装置と、
前記判定装置の判定結果を建設機械の管理部署またはユーザーに伝達する伝達装置とを備えることを特徴とする建設機械の管理システム。 A position detection device provided in a construction machine for detecting position information of the construction machine;
A transmission device for transmitting position information detected by the position detection device;
A determination device that is provided at a remote location with respect to the construction machine, and that determines whether there is an abnormality with respect to the position of the construction machine based on position information from the transmission device;
A construction machine management system comprising: a transmission device that transmits a judgment result of the judgment device to a management department or user of the construction machine.
前記伝達装置は、前記判定装置が異常ありと判断した場合にのみその判定結果を伝達することを特徴とする建設機械の管理システム。 The construction machine management system according to claim 11,
The transmission system transmits a determination result only when the determination device determines that there is an abnormality.
前記伝達装置は、前記判定結果を電子メールにより伝達することを特徴とする建設機械の管理システム。 The construction machine management system according to claim 11,
A construction machine management system, wherein the transmission device transmits the determination result by electronic mail.
前記位置に情報に基づいて前記建設機械の位置に対する異常の有無を判定する判定装置と、
前記判定装置の判定結果を建設機械の管理部署に送信する送信装置とを備えることを特徴とする建設機械。 A position detection device for detecting position information of the construction machine;
A determination device that determines whether there is an abnormality with respect to the position of the construction machine based on the information at the position;
A construction machine comprising: a transmission device that transmits a determination result of the determination device to a management department of the construction machine.
前記判定結果を建設機械の管理部署またはユーザーに伝達する伝達装置とを備えることを特徴とする建設機械の管理システム。 A determination device that receives position information of the construction machine transmitted from a construction machine, and determines whether or not there is an abnormality with respect to the position of the construction machine based on the position information;
A construction machine management system comprising: a transmission device that transmits the determination result to a construction machine management department or a user.
前記判定装置は、予め設定された前記建設機械の位置に関する情報と、前記建設機械から送信される位置情報とに基づいて前記異常の有無を判定することを特徴とする建設機械の管理システム。 The construction machine management system according to claim 15 or 16,
The management system for a construction machine, wherein the determination device determines the presence / absence of the abnormality based on information on a position of the construction machine set in advance and position information transmitted from the construction machine.
前記受信した情報を建設機械の管理部署またはユーザーに伝達する伝達装置とを備えることを特徴とする建設機械の管理システム。 A receiving device for receiving a determination result relating to a position abnormality of the construction machine transmitted from a construction machine;
A construction machine management system comprising: a transmission device that transmits the received information to a construction machine management department or a user.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005334178A JP4176762B2 (en) | 2000-03-31 | 2005-11-18 | Construction machine management system |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000099086 | 2000-03-31 | ||
| JP2005334178A JP4176762B2 (en) | 2000-03-31 | 2005-11-18 | Construction machine management system |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001570922A Division JP3836725B2 (en) | 2000-03-31 | 2001-03-30 | Construction machine management system and construction machine |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006183452A true JP2006183452A (en) | 2006-07-13 |
| JP2006183452A5 JP2006183452A5 (en) | 2007-05-31 |
| JP4176762B2 JP4176762B2 (en) | 2008-11-05 |
Family
ID=36736756
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005334178A Expired - Fee Related JP4176762B2 (en) | 2000-03-31 | 2005-11-18 | Construction machine management system |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4176762B2 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008179987A (en) * | 2007-01-24 | 2008-08-07 | Komatsu Ltd | Movable body monitoring system |
| JP2019127180A (en) * | 2018-01-25 | 2019-08-01 | 三菱マヒンドラ農機株式会社 | Anti-theft system for work vehicle |
-
2005
- 2005-11-18 JP JP2005334178A patent/JP4176762B2/en not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008179987A (en) * | 2007-01-24 | 2008-08-07 | Komatsu Ltd | Movable body monitoring system |
| JP2019127180A (en) * | 2018-01-25 | 2019-08-01 | 三菱マヒンドラ農機株式会社 | Anti-theft system for work vehicle |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4176762B2 (en) | 2008-11-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3836725B2 (en) | Construction machine management system and construction machine | |
| US6920382B2 (en) | Repair and maintenance support system and a car corresponding to the system | |
| EP1466795B1 (en) | System and method for managing construction machinery | |
| US8626107B2 (en) | System and method for managing communication of a moveable entity for energy conservation | |
| US7002465B2 (en) | Security system of construction machine | |
| US20110093093A1 (en) | System and method for remotely controlling machines | |
| JP3981840B2 (en) | Operation status notification system | |
| WO2009074066A1 (en) | A system and method for locating and monitoring machine and a device for realizing communication | |
| EP1191156B1 (en) | System for supplying fuel to construction machine | |
| JP2002088821A (en) | Method, device and system for displaying operating state of construction machinery | |
| JP4176762B2 (en) | Construction machine management system | |
| JP4656772B2 (en) | Mobile communication device | |
| JP5250912B2 (en) | Construction machine starting lock device | |
| JP5274070B2 (en) | Work machine position management system and work area data update method | |
| JP4593029B2 (en) | Mobile communication device | |
| JP3720719B2 (en) | Vehicle theft alarm system and vehicle theft alarm method | |
| JP4574905B2 (en) | Mobile communication device | |
| JP2003099894A (en) | Moving body information managing device | |
| JP2008121203A (en) | Working machine | |
| JP3959218B2 (en) | Transport vehicle work / operation management system | |
| JP2008240462A (en) | Operator managing system | |
| JP2008024071A (en) | Vehicle management system | |
| KR20060026739A (en) | Method and system for automatically noticing an emergency |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070406 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070406 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080401 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080530 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080805 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080820 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110829 Year of fee payment: 3 |
|
| R150 | Certificate of patent (=grant) or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110829 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120829 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130829 Year of fee payment: 5 |
|
| LAPS | Cancellation because of no payment of annual fees |