JP2006142904A - Brake control device for vehicle - Google Patents
Brake control device for vehicle Download PDFInfo
- Publication number
- JP2006142904A JP2006142904A JP2004333106A JP2004333106A JP2006142904A JP 2006142904 A JP2006142904 A JP 2006142904A JP 2004333106 A JP2004333106 A JP 2004333106A JP 2004333106 A JP2004333106 A JP 2004333106A JP 2006142904 A JP2006142904 A JP 2006142904A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- brake
- release timing
- dangerous
- collision
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Abstract
Description
本発明は車両のブレーキ制御装置に関するものである。 The present invention relates to a vehicle brake control device.
自車両と前方の障害物との距離及び相対速度に基いて、自車両が当該障害物に衝突する可能性があるか否かを判定し、衝突可能性があるとき、つまり衝突が予知されたときに自車両のブレーキ手段を自動的に作動させる自動ブレーキ装置は一般に知られている。例えば特許文献1には、かかる自動ブレーキ装置において、自車両が前方障害物に衝突するまでの余裕度に基いてブレーキ手段の作動開始タイミングを変えることが記載されている。また、特許文献2には、自動ブレーキ作動後、自車両と前方障害物との距離が所定値以上になったときに当該自動ブレーキを解除することが記載されている。
しかし、上記自動ブレーキが、例えば、交差点、高速道路のトンネル内、或いは見通しの悪い道路、交通量が多い道路、他車両の走行速度が高い道路のような所でかけられた場合、自車両と前方障害物との衝突は回避されても、減速又は停車した自車両に対して他車両が衝突し易くなる。 However, if the automatic brake is applied at an intersection, a highway tunnel, a road with poor visibility, a road with a lot of traffic, or a road with a high traveling speed of other vehicles, Even if a collision with an obstacle is avoided, another vehicle easily collides with the host vehicle that has been decelerated or stopped.
そこで、本発明は、自動ブレーキの作動によって自車両が他車両(自動車の他、路面電車、その他の鉄道車両を含む)から衝突されることを防止することを課題とする。 Therefore, an object of the present invention is to prevent the own vehicle from colliding with other vehicles (including automobiles, streetcars, and other railway vehicles) by the operation of the automatic brake.
本発明は、このような課題に対して、自動ブレーキの解除タイミングを、他車両から衝突され易い危険箇所と、そのような危険がない又は少ない箇所とで相異ならせるようにした。 According to the present invention, in order to solve such a problem, the timing for releasing the automatic brake is differentiated between a dangerous place where the vehicle is likely to collide with another vehicle and a place where there is no or little such danger.
すなわち、請求項1に係る発明は、自車両前方の障害物を検知する障害物検知手段と、
上記障害物検知手段によって検知された障害物に対して自車両が衝突する可能性があるか否かを判定する衝突予知手段と、
上記衝突予知手段によって衝突が予知されたときに自車両のブレーキ手段を作動させるブレーキ制御手段とを備えた車両のブレーキ制御装置であって、
自車両の進行路上の、自車両が減速又は停車したときに他車両から衝突されやすい危険箇所を検出する検出手段と、
上記衝突予知に伴って上記ブレーキ手段を作動させた後の上記ブレーキ制御手段によるブレーキ解除タイミングを、上記検出手段によって検出された危険箇所と非危険箇所とで異ならせるブレーキ解除タイミング変更手段とを備えていることを特徴とする。
That is, the invention according to
A collision prediction means for determining whether or not the own vehicle may collide with the obstacle detected by the obstacle detection means;
A brake control device for a vehicle, comprising: brake control means for operating the brake means of the host vehicle when a collision is predicted by the collision prediction means;
Detecting means for detecting a dangerous point on the traveling path of the host vehicle that is likely to collide with another vehicle when the host vehicle decelerates or stops;
Brake release timing changing means for making the brake release timing by the brake control means after operating the brake means in accordance with the collision prediction differ between a dangerous place detected by the detection means and a non-dangerous place. It is characterized by.
従って、上記衝突予知に伴うブレーキ手段の作動により、自車両が減速又は停車した場合、危険箇所ではブレーキ解除タイミングを早めることによりその危険箇所を早く脱出して他車両からの衝突を避け、或いはその解除タイミングを遅らせることにより他車両からの衝突を避けて危険箇所を脱出することが可能になる。 Therefore, when the host vehicle decelerates or stops due to the operation of the brake means associated with the above-mentioned collision prediction, the dangerous part can be quickly escaped by advancing the brake release timing to avoid a collision from another vehicle, or By delaying the release timing, it becomes possible to escape from a dangerous place while avoiding a collision from another vehicle.
請求項2に係る発明は、請求項1において、
上記ブレーキ解除タイミング変更手段は、上記危険箇所でのブレーキ解除タイミングを上記非危険箇所でのブレーキ解除タイミングよりも早めることを特徴とする。
The invention according to
The brake release timing changing means is characterized in that the brake release timing at the dangerous place is made earlier than the brake release timing at the non-dangerous place.
すなわち、減速又は停車した自車両に対して他車両からの衝突可能性があるため、その危険箇所を早く脱出する必要があるときに、ブレーキ解除タイミングが遅れることは好ましくない。一方、ブレーキ解除タイミングが早まっても、ドライバはアクセルペダル又はブレーキペダルの操作によって、他車両からの衝突を避けるべく自車両を減速又は停車状態に保持することが可能である。そこで、本発明は、上記危険箇所でのブレーキ解除タイミングを上記非危険箇所でのブレーキ解除タイミングよりも早めるようにしたものである。 That is, since there is a possibility of collision from another vehicle with respect to the host vehicle decelerated or stopped, it is not preferable that the brake release timing is delayed when it is necessary to quickly escape from the dangerous place. On the other hand, even if the brake release timing is advanced, the driver can hold the host vehicle in a decelerated or stopped state by operating the accelerator pedal or the brake pedal so as to avoid a collision from another vehicle. In view of this, the present invention is such that the brake release timing at the dangerous place is made earlier than the brake release timing at the non-dangerous place.
請求項3に係る発明は、請求項2において、
上記衝突の予知に伴って上記ブレーキ手段を作動させたときの自車両の停車位置を求める算出手段を備え、
上記検出手段は、上記衝突予知に伴って上記ブレーキ手段を作動させる地点から上記停車位置算出手段によって求められた停車位置に至る間に存在する上記危険箇所を検出することを特徴とする。
The invention according to
A calculation means for obtaining a stop position of the host vehicle when the brake means is operated in accordance with the prediction of the collision;
The detection means detects the dangerous point that exists between a point where the brake means is operated in accordance with the collision prediction and a stop position obtained by the stop position calculation means.
従って、予め、ブレーキを作動させた時の停車地点を求め、ブレーキを作動させる地点から当該停車地点に至る、限定された範囲で危険箇所の存在を検出するから、自車両の進行路に危険箇所があるというだけではブレーキ解除タイミングは変更されず、すなわち、ブレーキ解除タイミングが不必要に早まることはなく、自車両と自車両前方の障害物との衝突を回避する上で有利になる。一方、ブレーキ手段を作動させたときに自車両が上記危険箇所で減速又は停車することが精度良く検出されるから、ブレーキ解除タイミングを早めて当該危険箇所を速やかに脱出し、自車両が他車両から衝突されることを避けることができる。 Therefore, since the stop point when the brake is operated is obtained in advance and the presence of the dangerous point is detected within a limited range from the point where the brake is operated to the stop point, the dangerous point is detected on the traveling path of the host vehicle. The brake release timing is not changed only by the fact that there is, that is, the brake release timing is not unnecessarily advanced, which is advantageous in avoiding a collision between the host vehicle and an obstacle ahead of the host vehicle. On the other hand, when the brake means is operated, it is accurately detected that the host vehicle decelerates or stops at the dangerous place, so that the dangerous place is quickly escaped by accelerating the brake release timing. You can avoid being hit from.
請求項4に係る発明は、請求項3において、
上記検出手段は、さらに上記危険箇所の危険度を検出するものであり、
上記ブレーキ解除タイミング変更手段は、上記危険箇所の危険度が高くなるほど上記ブレーキ解除タイミングを早めることを特徴とする。
The invention according to
The detection means further detects a risk level of the dangerous place,
The brake release timing changing means is characterized in that the brake release timing is advanced as the danger level of the dangerous part increases.
すなわち、ブレーキ手段を作動させたときに自車両が他車両から衝突される可能性は、自車両を他車両がどの程度発見し難い道路状況か、自車両を発見した時点での他車両の車速が高いか、他車両が自車両との衝突を回避し難い道路形態か(例えば道路幅が狭いか、トンネルか)等によって異なる。つまり、同じく危険箇所といっても、他車両から衝突される危険度は異なる。 That is, when the brake means is operated, the possibility that the own vehicle will collide with another vehicle depends on how difficult it is for the other vehicle to find the own vehicle or the vehicle speed of the other vehicle at the time when the own vehicle is found. Or whether the other vehicle has a road form in which it is difficult to avoid a collision with the host vehicle (for example, whether the road is narrow or a tunnel). In other words, even if it is a dangerous place, the degree of danger of being collided with another vehicle is different.
そこで、危険箇所の危険度を求めて、その危険度が高くなるほど上記ブレーキ解除タイミングを早めるようにしたものである。よって、自車両をそのような危険箇所から速やかに脱出させる上で有利になり、他車両から衝突される可能性が少なくなる。 Therefore, the risk level of the dangerous part is obtained, and the brake release timing is advanced as the risk level increases. Therefore, it is advantageous in quickly escaping the own vehicle from such a dangerous place, and the possibility of being collided with another vehicle is reduced.
請求項5に係る発明は、請求項1乃至請求項4のいずれか一において、
上記検出手段は、自車両を走行目的地に誘導する車載ナビゲーション手段の地図情報に基いて上記検出を行なうことを特徴とする。
The invention according to
The detection means performs the detection based on map information of vehicle-mounted navigation means for guiding the host vehicle to a travel destination.
すなわち、道路の交差点、道路の曲がり角、或いはトンネル内は、自車両が急に減速又は停車すると危険であり、また、そのような危険箇所の危険度が高いか否かは、道路の曲率、道路勾配や道路周辺構造物との関係での進行路の見通し距離などによって、つまりは、自車両を他車両が発見し易いか否かによって、さらには高速道路か市街地道路の違いによって、つまりは他車両の車速によって変わる。そうして、このような道路の特性や道路に関連する地形的状況は、地図によって把握することができる。そこで、当該発明は、自車両を走行目的地に誘導するナビゲーション手段の地図情報に基いて上記危険箇所の検出、さらにはその危険度の検出を行なうようにしたものである。 That is, it is dangerous if the host vehicle suddenly decelerates or stops at the intersection of roads, road corners, or tunnels, and whether the risk of such a dangerous point is high is determined by the road curvature, road Depending on the gradient and the visibility distance of the traveling path in relation to the structure around the road, that is, whether or not the other vehicle can easily find the vehicle, and further depending on the difference between the highway and the urban road, that is, other It depends on the vehicle speed. Thus, such road characteristics and topographical conditions related to the road can be grasped by a map. In view of this, the present invention is configured to detect the dangerous point and further detect the risk based on the map information of the navigation means for guiding the host vehicle to the travel destination.
請求項6に係る発明は、請求項1乃至請求項4のいずれか一において、
上記検出手段は、路車間通信によって取得する道路交通情報に基いて上記検出を行なうことを特徴とする。
The invention according to
The detection means performs the detection based on road traffic information acquired by road-to-vehicle communication.
すなわち、自車両の現在地情報、上述の道路特性や道路に関連する地形的情報といった道路に関する静的情報、他車両の車速などの動的情報は路車間通信によって取得することができる。そこで、当該発明ではそのような外部から提供される道路交通情報に基いて上記危険箇所の検出、さらにはその危険度の検出を行なうようにしたものである。 That is, the current location information of the host vehicle, static information about the road such as the above-described road characteristics and topographical information related to the road, and dynamic information such as the vehicle speed of other vehicles can be acquired by road-to-vehicle communication. Therefore, in the present invention, detection of the above-mentioned dangerous place and further detection of the degree of danger are performed based on such road traffic information provided from the outside.
以上のように、本発明によれば、自車両の進行路上の、自車両が減速又は停車したときに他車両から衝突されやすい危険箇所を検出する検出手段を備え、前方障害物に対する衝突予知に伴ってブレーキ手段を作動させた後のブレーキ解除タイミングを、上記検出手段によって検出された危険箇所と非危険箇所とで異ならせるようにしたから、危険箇所ではブレーキ解除タイミングを早めることによりその危険箇所を早く脱出して他車両からの衝突を避け、或いはその解除タイミングを遅らせることにより他車両からの衝突を避けて危険箇所を脱出することが可能になる。 As described above, according to the present invention, the vehicle is provided with detection means for detecting a dangerous point that is likely to collide with another vehicle when the host vehicle decelerates or stops on the traveling path of the host vehicle, and predicts a collision with a front obstacle. Since the brake release timing after operating the brake means is made different between the dangerous place detected by the detection means and the non-hazardous place, the danger place can be increased by increasing the brake release timing at the dangerous place. It is possible to avoid the collision from the other vehicle and escape from the dangerous place by avoiding the collision from the other vehicle by escaping quickly and avoiding the collision from the other vehicle or delaying the release timing.
また、衝突予知に伴ってブレーキ手段を作動させたときの自車両の停車位置を求め、ブレーキ手段を作動させる地点から当該停車位置に至る間に他車両から衝突されやすい危険箇所があるときに、ブレーキ解除タイミングを早めるようにしたものによれば、自車両が当該危険箇所で減速又は停車することになるか否かを精度良く判定することができ、他車両から衝突されることを確実に防止する上で有利になるとともに、限定された範囲で危険箇所の存在を判断するから、ブレーキ解除タイミングが不必要に早まることがなくなり、上記衝突予知された障害物に対する自車両の衝突を回避する上で有利になる。 Further, when the brake means is operated in accordance with the collision prediction, the stop position of the own vehicle is obtained, and when there is a dangerous place that is likely to be collided from another vehicle from the point where the brake means is operated to the stop position, According to the brake release timing being advanced, it is possible to accurately determine whether or not the host vehicle will decelerate or stop at the dangerous location, and reliably prevent collision with other vehicles. In addition, the presence of a dangerous point is determined within a limited range, so that the brake release timing is not unnecessarily advanced, and the collision of the vehicle with the obstacle predicted for the collision is avoided. Will be advantageous.
また、危険箇所の危険度が高くなるほど上記ブレーキ解除タイミングを早めるようにしたものによれば、自車両が他車両から衝突されることを防止する上でさらに有利になる。 Moreover, according to what advanced the said brake release timing, so that the danger level of a danger location becomes high, it becomes further advantageous in preventing that the own vehicle collides with another vehicle.
以下、本発明の実施形態を図面に基づいて詳細に説明する。 Hereinafter, embodiments of the present invention will be described in detail with reference to the drawings.
<全体構成>
図1に示す車両1のブレーキ制御装置において、2は自車両前方の車両、その他の障害物を検知する障害物検知手段、3は車両1の各輪のブレーキを作動させるブレーキ手段、4は障害物検知手段2によって検知された障害物に対して自車両1が衝突する可能性があるとき、すなわち、衝突が予知されたときに上記ブレーキ手段3を作動させるマイクロコンピュータを用いたコントローラであり、ブレーキ手段3の作動を検知する作動検知手段10からの信号がコントローラ4に入力される。また、乗員が着座するシート5には三点式のシートベルト6が設けられ、そのリトラクタ7には、上記衝突予知時にシートベルト6を電動モータによって巻き取る一方、衝突検知手段8によって障害物に対する自車両の衝突が検知されたときに火薬を爆発させてシートベルト6を不可逆的に巻き取るプリテンショナ機構9が設けられている。このプリテンショナ機構9は上記コントローラ4によって作動が制御されるようになっている。
<Overall configuration>
In the brake control device of the
上記コントローラ4は、図2に示すように、上記障害物検知手段2によって検知された障害物に対する自車両1の衝突可能性を判定する衝突予知手段11と、衝突予知に基いて上記ブレーキ手段3の作動を制御するブレーキ制御手段12とを備えているとともに、ブレーキ制御手段12がブレーキ手段3に与えるブレーキ解除タイミングを変更するために、ブレーキ手段3を作動させたときの自車両の停車位置を求める停車位置算出手段13と、危険箇所検出手段14と、ブレーキ解除タイミング変更手段15とを備えている。
As shown in FIG. 2, the
衝突予知手段11は、障害物検知手段2の出力に基いて、自車両と自車両前方の障害物との相対速度及び相対加速度を算出して自車両の安全車間距離を求め、自車両と当該障害物との距離が安全車間距離以下になったときに、衝突を予知する。すなわち、障害物検知手段2は、ミリ波レーダによって構成されており、自車両から発したレーダ波が障害物に反射して戻ってくるまでの時間によって自車両と当該障害物との距離が求められる。また、その距離の時間変化に基いて上記相対速度及び相対加速度が求められ、この相対速度及び相対加速度に相応する予め設定した安全車間距離が与えられる。
The collision prediction means 11 calculates the relative speed and relative acceleration between the host vehicle and the obstacle ahead of the host vehicle based on the output of the
そうして、上記ブレーキ制御手段12は、衝突予知手段11によって衝突が予知されたとき、自車両の車速、上記相対速度、相対加速度及び車間距離等に基いて、ブレーキ手段3を作動させる制御条件(ブレーキ開始タイミングTs、ブレーキ強度(目標減速度G)及びブレーキ解除タイミング)を設定する。ブレーキ解除タイミングは例えば車速が0km/hになったときと設定する。 Thus, when the collision is predicted by the collision prediction means 11, the brake control means 12 controls the brake means 3 based on the vehicle speed of the host vehicle, the relative speed, the relative acceleration, the inter-vehicle distance, and the like. (Brake start timing Ts, brake strength (target deceleration G), and brake release timing) are set. The brake release timing is set, for example, when the vehicle speed becomes 0 km / h.
停車位置算出手段13は、ブレーキ手段3をタイミングTsで作動させたときのブレーキ終了までのブレーキ時間Teを、自車両の現在車速V及びブレーキ手段3の作動による減速度Gとから算出する。ブレーキ終了時の車速Ve=0、減速度G=0.5×9.8m/s2とすると、
Ve=V−G×Te
0 =V−0.5×9.8×Te
Te=V/(0.5×9.8)[sec]
となる。
The stop position calculation means 13 calculates the braking time Te until the brake end when the brake means 3 is operated at the timing Ts from the current vehicle speed V of the host vehicle and the deceleration G due to the operation of the brake means 3. When the vehicle speed Ve = 0 at the end of braking and the deceleration G = 0.5 × 9.8 m / s 2 ,
Ve = V−G × Te
0 = V−0.5 × 9.8 × Te
Te = V / (0.5 × 9.8) [sec]
It becomes.
そして、停車位置算出手段13は、上記ブレ−キ時間Teでの自車両の移動距離Sを求め、
S=V×Te−1/2×G×Te2
ブレーキ手段3をタイミングTsで作動させるブレーキ開始地点からS[m]移動したブレーキ終了地点を後述するナビゲーション手段の地図情報から算出する。
And the stop position calculation means 13 calculates | requires the moving distance S of the own vehicle in the said brake time Te,
S = V × Te−1 / 2 × G × Te 2
The brake end point moved S [m] from the brake start point at which the brake means 3 is operated at the timing Ts is calculated from the map information of the navigation means described later.
危険箇所検出手段14は、道路交通に関するデータ供給手段16より取得するデータに基いて、上記ブレーキ開始地点からブレーキ終了地点に至るブレーキ区間に、自車両1が減速又は停車すると他車両から衝突され易い危険箇所が存在するか否か、並びにその危険度を検出する。
Based on the data acquired from the road traffic data supply means 16, the dangerous point detection means 14 is likely to collide with other vehicles when the
データ供給手段16は、自車両1を走行目的地に誘導するための自車両1に設けたナビゲーション手段、並びにVICSなどの道路交通情報の提供通信網からビーコン受信アンテナによって当該情報を取得する道路交通情報受信器とによって構成されている。
The data supply means 16 obtains the information from the navigation means provided in the
すなわち、ナビゲーション手段は、GPS用人工衛星からの送信電波を受信し、これに基づいて自車両の現在地、進行方向を演算するためのGPSアンテナ・レシーバと、自車両の進行方向の変化を検出するためのジャイロコンパスと、自車両の車速センサと、乗員が自車両の走行目的地の入力、現在地から目的地までの走行経路の指定など各種の指令を入力するための入力手段と、地図情報が格納された記憶媒体(DVD又はCD−ROM)から当該地図情報を読み出すためのプレーヤと、道路地図や現在地を表示するためのディスプレイと、これらの各手段からの情報を取り込んで、主として自車両の現在地や進行方向、目的地、走行経路等をディスプレイに表示して、運転者に対して自車両の走行案内を行うためのナビゲーション制御ユニットとを備えている。 That is, the navigation means receives a transmission radio wave from a GPS artificial satellite, and based on this, detects a change in the traveling direction of the host vehicle and a GPS antenna / receiver for calculating the current location and traveling direction of the host vehicle. A gyro compass for the vehicle, a vehicle speed sensor for the own vehicle, an input means for the occupant to input various commands such as input of the travel destination of the host vehicle, designation of a travel route from the current location to the destination, and map information A player for reading out the map information from a stored storage medium (DVD or CD-ROM), a display for displaying a road map and the current location, and information from each of these means are incorporated to mainly store the vehicle. Navigation control to display the current location, direction of travel, destination, travel route, etc. on the display to guide the driver of the vehicle to the driver And a knit.
記憶媒体には、地図情報として、道路線図、鉄道路線図、河川水域線図等の線図、道路幅員、車線幅、道路の種別(高速道路、郊外道路及び市街地道路の別)、一方通行、その他の道路属性、道路各点の高度、信号機の位置等が記憶されている。 In the storage medium, as map information, road maps, railway maps, river water map, etc., road width, lane width, road type (highway, suburban roads and urban roads), one-way Other road attributes, the altitude of each point on the road, the position of the traffic light, etc. are stored.
道路交通情報受信器は、道路交通情報の提供通信網から、自車両の現在地情報、分岐点情報、道路案内情報の他、事故情報、渋滞情報、その他の車の流れに関する動的情報等を取得する。 The road traffic information receiver obtains the current location information, branch point information, road guidance information, accident information, traffic jam information, and other dynamic information about the flow of vehicles from the communication network that provides the road traffic information. To do.
本実施形態の場合、ナビゲーション手段の地図情報及び道路交通情報受信器によって得られる道路及び交通に関する情報が、上記危険箇所検出手段14による上記検出のためのデータとして用いられる。 In the case of this embodiment, the map information of the navigation means and the information on the road and traffic obtained by the road traffic information receiver are used as data for the detection by the dangerous point detection means 14.
危険箇所検出手段14は、次の1〜4の観点から上記ブレーキ区間における危険箇所の存在及びその危険度を検出する。すなわち、上記ブレーキ区間についての他車両から衝突され易い危険性に関連する複数の情報に基いて、その危険度をレベル評価し、その評価が所定レベル以上の箇所を危険箇所とする。 The dangerous point detection means 14 detects the presence of a dangerous point in the brake section and the degree of danger from the following viewpoints 1-4. That is, based on a plurality of pieces of information related to the risk of being easily collided with other vehicles in the brake section, the risk level is evaluated as a risk location.
1.上記ブレーキ区間に、自車両を他車両が発見(他車両の運転者が発見。以下、同じ。)するタイミングが遅れ易い箇所があるか。このタイミングが遅くなるほど、他車両が自車両との衝突を回避するための運転操作が遅れることになり、衝突の危険度が高くなる。 1. Is there a place in the brake section where the other vehicle discovers the vehicle (the driver of the other vehicle discovers, the same applies hereinafter) that is likely to be delayed. As this timing is delayed, the driving operation for avoiding the collision of the other vehicle with the host vehicle is delayed, and the risk of collision increases.
具体的には、道路勾配に関する情報A(上り勾配が強いほど、上り勾配から平坦路又は下り勾配に移った箇所は、上り勾配位置から見通せないから上記発見のタイミングが遅れ、危険度が高い)、道路の曲率に関する情報B(道路曲率が大きいほど、当該湾曲部や該湾曲部に続く箇所は湾曲部手前から見通せない車両が発見され難いからから上記発見のタイミングが遅れ、危険度が高い)、並びに街路樹、建物等との関係での道路の見通し距離に関する情報C(見通し距離Cが短いほどその箇所は、上記発見のタイミングが遅れ、危険度が高い)をナビゲーション手段の地図情報から求め、それら情報を数値で評価(例えば10段階評価)する。 Specifically, information A regarding the road gradient (the stronger the uphill, the more difficult it is to see from the uphill position where the road has moved from the uphill to the flat road or downhill, so the timing of the discovery is delayed and the risk is high) , Information B regarding road curvature (the greater the road curvature, the more difficult it is to find a vehicle in which the curved portion and the portion following the curved portion cannot be seen in front of the curved portion, so the timing of the discovery is delayed and the risk is high) In addition, information C regarding the road visibility distance in relation to roadside trees, buildings, etc. is obtained from the map information of the navigation means (the shorter the visibility distance C, the later the timing of the above discovery and the higher the risk). The information is evaluated numerically (for example, 10-level evaluation).
2.上記ブレーキ区間に、自車両を他車両が発見した時点での他車両の車速が高いと予測される箇所があるか。他車両の車速が高いほど、回避運転操作がなされても自車両に衝突し易いので危険度が高くなる。 2. Is there a place in the brake section where the vehicle speed of the other vehicle is predicted to be high when the other vehicle is found by the other vehicle? The higher the vehicle speed of the other vehicle, the higher the degree of danger because it is likely to collide with the host vehicle even if the avoidance driving operation is performed.
具体的には、道路交通情報受信器によって得られる車両の流れに関する情報D(車両の流れが速くなるほど危険度が高い)、上記地図情報から得られる道路の種別に関する情報E(高速道路では他車両の車速が高く危険度が高い)、道路幅に関する情報F(道路幅が広いほど他車両の車速が高く危険度が高い)を数値で評価する。 Specifically, information D regarding the flow of the vehicle obtained by the road traffic information receiver (has a higher degree of danger as the flow of the vehicle becomes higher), information E regarding the type of road obtained from the map information (other vehicles on highways) The vehicle speed is high and the danger level is high), and the road width information F (the wider the road width, the higher the vehicle speed of other vehicles and the higher the danger level) is evaluated numerically.
3.上記ブレーキ区間に、他車両が衝突を回避できない箇所があるか。衝突回避できない箇所の距離が長いほど危険度が高くなる。 3. Is there a location in the brake section where other vehicles cannot avoid a collision? The longer the distance that cannot be avoided, the higher the risk.
具体的には、上記ブレーキ区間と退避路のないトンネルとが重なる距離に関する情報G(重なり距離が長くなるほど、他車両は衝突を回避することができず、危険度が高い)、右折交差点と重なる距離に関する情報H(重なり距離が長くなるほど、他車両は衝突を回避することができず、危険度が高い)を上記地図情報から求め、それら情報を数値で評価(例えば10段階評価)する。 Specifically, information G regarding the distance at which the brake section and the tunnel without a retreat road overlap (the longer the overlap distance, the more the other vehicle cannot avoid the collision and the higher the risk), and the right turn intersection overlaps Information H about distance (the longer the overlapping distance is, the more vehicles cannot avoid collision and the higher the risk) is obtained from the map information, and the information is evaluated numerically (for example, 10-step evaluation).
4.上記ブレーキ区間に、以前に事故が発生した箇所があるか。当該箇所の事故発生件数が多くなるほど危険度が高くなる。 4). Is there a location where an accident occurred before in the above brake section? The risk increases as the number of accidents at the location increases.
具体的には、道路交通情報の提供機関が過去の事故情報を提供している場合は、道路交通情報受信器によって得られる当該事故情報I(車載ナビゲーション手段の記憶媒体に各地点の事故履歴が記憶された場合はその事故情報)を数値で評価する。 Specifically, when the road traffic information provider provides past accident information, the accident information I obtained by the road traffic information receiver (the accident history at each point is stored in the storage medium of the vehicle-mounted navigation means). If it is stored, the accident information) is evaluated numerically.
次いで、危険箇所検出手段14は、上記情報A〜Iの評価値に当該各情報の危険性に与える影響に応じた係数(重み付け)を与え、危険度の評価レベルZを求める。すなわち、
Z=A×a+B×b+C×c+……+I×i
であり、この場合のA、B、C等の英大文字は評価値、a、b、c等の英小文字は対応する係数である。危険箇所検出手段14は、上記評価レベルZが所定値以上の場合を後述するブレーキ解除タイミングを早めるべき危険箇所とする。
Next, the dangerous part detection means 14 gives a coefficient (weighting) according to the influence of the information A to I on the risk of the information, and obtains the evaluation level Z of the risk level. That is,
Z = A × a + B × b + C × c +... + I × i
In this case, uppercase letters such as A, B, and C are evaluation values, and lowercase letters such as a, b, and c are corresponding coefficients. The dangerous spot detection means 14 sets a case where the evaluation level Z is equal to or higher than a predetermined value as a dangerous spot where the brake release timing described later should be advanced.
そうして、ブレーキ解除タイミング変更手段15は、上記危険箇所検出手段14によって上記ブレーキ区間に危険箇所が存在すると検出されたとき、ブレーキ制御手段12によるブレーキ解除タイミングを早める。その場合、ブレーキ解除タイミング変更手段15は、危険度の評価レベルZが高いほど解除タイミングの早める。 Then, the brake release timing changing means 15 advances the brake release timing by the brake control means 12 when the dangerous place detecting means 14 detects that a dangerous place exists in the brake section. In this case, the brake release timing changing means 15 advances the release timing as the risk evaluation level Z is higher.
本実施形態の場合、危険箇所検出手段14は、評価レベルZに基いて危険度小(Z<第1所定値)、危険度中(第1所定値≦Z<第2所定値)、危険度大(Z≧第2所定値)の3段階で危険度を判定し、危険度中及び危険度大の箇所をブレーキ解除タイミングを変更すべき危険箇所とする。ブレーキ解除タイミング変更手段15は、危険度中のときよりも危険度大のときに当該解除タイミングを大きく早める。 In the case of the present embodiment, the dangerous point detection means 14 is based on the evaluation level Z, the risk level is small (Z <first predetermined value), the risk level is medium (first predetermined value ≦ Z <second predetermined value), and the risk level. The degree of danger is judged in three stages of large (Z ≧ second predetermined value), and the places where the degree of danger is high and the degree of danger are high are designated as dangerous places where the brake release timing should be changed. The brake release timing changing means 15 greatly increases the release timing when the degree of danger is greater than when the degree of danger is medium.
図3はコントローラ4によるブレーキ解除タイミング変更制御のフローを示す。スタート後のステップS1において衝突予知手段11による衝突可能性が判定され、衝突可能性有りと判定されたときはステップS2に進み、ブレーキ制御手段12によってブレーキ制御条件が設定されてブレーキ制御が開始される。
FIG. 3 shows a flow of brake release timing change control by the
続くステップS3で停車位置算出手段13によって求められたブレーキ区間に危険箇所が存在するか否かが危険箇所検出手段14によって検出され、危険箇所が存在する場合はステップS4に進んでその危険度は小さいか否かが判定される。危険箇所がないとき、又は危険度小のときはステップS5に進み、ブレーキ解除タイミングは変更されずにブレーキ制御が続行される。 In the next step S3, it is detected by the dangerous part detecting means 14 whether or not there is a dangerous part in the brake section obtained by the stop position calculating means 13, and if there is a dangerous part, the process proceeds to step S4 and the degree of danger is determined. It is determined whether or not it is small. When there is no danger point or when the danger level is low, the process proceeds to step S5, and the brake control is continued without changing the brake release timing.
ステップS4において危険度小ではないと判定されたときはステップS6に進み、危険度中か否かが判定される。危険度中と判定されたときはステップS7に進み、ブレーキ解除タイミング変更手段15によりブレーキ解除タイミングが早められて(車速5km/hに変更されて)ブレーキ制御が続行される。ステップS6において危険度中ではないと判定されたとき(危険度大のとき)はステップS8に進み、ブレーキ解除タイミング変更手段15によりブレーキ解除タイミングがさらに早められて(車速10km/hに変更されて)ブレーキ制御が続行される。 When it is determined in step S4 that the degree of risk is not low, the process proceeds to step S6, and it is determined whether or not the degree of risk is medium. When it is determined that the degree of danger is medium, the process proceeds to step S7, where the brake release timing is advanced by the brake release timing changing means 15 (changed to the vehicle speed of 5 km / h) and the brake control is continued. If it is determined in step S6 that the degree of danger is not in danger (when the degree of danger is high), the process proceeds to step S8, where the brake release timing changing means 15 further advances the brake release timing (changed to a vehicle speed of 10 km / h). ) Brake control continues.
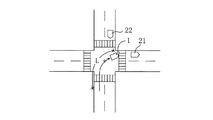
そこで、具体例に基いて本発明のブレーキ制御を説明すると、図4に示すように、例えば自車両1が道路の交差点に差し掛かったときに、前方障害物(この場合は前方走行車両)21との衝突可能性があると予知されることがある。その場合に、ブレーキ手段3を作動させて予定通りに自車両1の車速が零になるようにすると、交差点内で停車してしまって、反対車線を走行して交差点に差し掛かった他車両22から衝突される可能性がある。
Therefore, the brake control of the present invention will be described based on a specific example. As shown in FIG. 4, for example, when the
これに対して、本発明によれば、ブレーキ手段を作動させた場合のブレーキ区間Lが求められ、そのブレーキ区間Lに交差点あるときは危険箇所が存在するとされ、自車両の車速が零になる前にブレーキ手段3の作動が解除される。 On the other hand, according to the present invention, the brake section L when the brake means is operated is obtained, and when there is an intersection in the brake section L, it is determined that there is a dangerous place, and the vehicle speed of the host vehicle becomes zero. Before, the operation of the brake means 3 is released.
従って、自車両1は交差点内で停車することなく、この交差点を脱出することができ、他車両22との衝突が回避される。その場合、自車両1は障害物である前方走行車両21に接近する可能性があるが、ドライバは自らのアクセル操作又はブレーキ操作によって当該前方走行車両21との衝突を回避することができる。
Therefore, the
なお、上記実施形態では、道路の特性や道路に関連する地形的状況、過去の事故履歴といった静的情報の他、VICSから得られる他車両の車速情報、ブレーキ区間とトンネルや右折交差点とが重なる距離など、自車両の走行中に得られる動的情報を危険箇所及びその危険度の判定に用いたが、上記静的情報に基いて道路の危険箇所及び危険度を予め求めて記録媒体に記録しておき、該記録媒体に記録された情報に基いてブレーキ区間に危険箇所が存在するか否か、さらにはその危険度を求めるようにしてもよく、さらには、当該結果を上記動的情報に基いて補正するようにしてもよい。 In the above embodiment, in addition to static information such as road characteristics, road-related topographical conditions, and past accident histories, vehicle speed information of other vehicles obtained from VICS, brake sections, and tunnels and right-turn intersections overlap. The dynamic information obtained during travel of the vehicle, such as the distance, was used to determine the dangerous location and its risk level. Based on the static information, the road risk location and the risk level are determined in advance and recorded on the recording medium. In addition, based on the information recorded on the recording medium, it may be determined whether or not there is a dangerous point in the brake section, and further, the degree of danger may be obtained. You may make it correct | amend based on.
また、上記実施形態では、ブレーキ解除タイミングを非危険箇所(危険度小を含む)では車速零になったときとしたが、所定車速以下になったときとし、危険箇所では当該解除閾値を所定車速よりも高車速側に設定するようにしてもよい。 In the above embodiment, the brake release timing is set when the vehicle speed becomes zero at the non-hazardous location (including a low risk level), but when the vehicle speed becomes lower than the predetermined vehicle speed, the release threshold is set at the predetermined vehicle speed at the dangerous location. You may make it set to the higher vehicle speed side.
また、ブレーキ解除閾値を上述の如き車速ではなく、車速の低下量で設定し、危険箇所では非危険箇所よりも当該低下量を小さくする(例えば非危険箇所は30km/h以上の低下量、危険箇所は20km/h以上の低下量とする)ことにより、ブレーキ解除タイミングを早めるようにしてもよい。 In addition, the brake release threshold is set not by the vehicle speed as described above, but by the amount of decrease in the vehicle speed, and the amount of decrease is made smaller in the dangerous part than in the non-dangerous part (for example, the non-dangerous part has a reduction amount of 30 km / h or more The brake release timing may be advanced by setting the amount to a reduction amount of 20 km / h or more.
さらには、ブレーキ解除閾値を自車両と前方障害物との距離で設定する場合は、その距離を危険箇所では非危険箇所よりも短くすることで、その解除タイミングを早めるようにしてもよい。 Furthermore, when the brake release threshold value is set by the distance between the host vehicle and the front obstacle, the release timing may be advanced by making the distance shorter in the dangerous part than in the non-dangerous part.
要するに、本発明はブレーキ解除タイミングの設定の仕方は問わない。 In short, the present invention does not ask how to set the brake release timing.
1 自車両
2 障害物検知手段
3 ブレーキ手段
4 コントローラ
11 衝突予知手段
12 ブレーキ制御手段
13 停車位置算出手段
14 危険箇所検出手段
15 ブレーキ解除タイミング変更手段
21 障害物
22 他車両
DESCRIPTION OF
Claims (6)
上記障害物検知手段によって検知された障害物に対して自車両が衝突する可能性があるか否かを判定する衝突予知手段と、
上記衝突予知手段によって衝突が予知されたときに自車両のブレーキ手段を作動させるブレーキ制御手段とを備えた車両のブレーキ制御装置であって、
自車両の進行路上の、自車両が減速又は停車したときに他車両から衝突されやすい危険箇所を検出する検出手段と、
上記衝突予知に伴って上記ブレーキ手段を作動させた後の上記ブレーキ制御手段によるブレーキ解除タイミングを、上記検出手段によって検出された危険箇所と非危険箇所とで異ならせるブレーキ解除タイミング変更手段とを備えていることを特徴とする車両のブレーキ制御装置。 Obstacle detection means for detecting an obstacle ahead of the host vehicle;
A collision prediction means for determining whether or not the own vehicle may collide with the obstacle detected by the obstacle detection means;
A brake control device for a vehicle, comprising: brake control means for operating the brake means of the host vehicle when a collision is predicted by the collision prediction means;
Detecting means for detecting a dangerous point on the traveling path of the host vehicle that is likely to collide with another vehicle when the host vehicle decelerates or stops;
Brake release timing changing means for making the brake release timing by the brake control means after operating the brake means in accordance with the collision prediction differ between a dangerous place detected by the detection means and a non-dangerous place. A brake control device for a vehicle.
上記ブレーキ解除タイミング変更手段は、上記危険箇所でのブレーキ解除タイミングを上記非危険箇所でのブレーキ解除タイミングよりも早めることを特徴とする車両のブレーキ制御装置。 In claim 1,
The brake control device for a vehicle according to claim 1, wherein the brake release timing changing means advances the brake release timing at the dangerous place earlier than the brake release timing at the non-dangerous place.
上記衝突の予知に伴って上記ブレーキ手段を作動させたときの自車両の停車位置を求める算出手段を備え、
上記検出手段は、上記衝突予知に伴って上記ブレーキ手段を作動させる地点から上記停車位置算出手段によって求められた停車位置に至る間に存在する上記危険箇所を検出することを特徴とする車両のブレーキ制御装置。 In claim 2,
A calculation means for obtaining a stop position of the host vehicle when the brake means is operated in accordance with the prediction of the collision;
The vehicle brake according to claim 1, wherein the detection means detects the dangerous point existing between a point where the brake means is operated in accordance with the collision prediction and a stop position obtained by the stop position calculation means. Control device.
上記検出手段は、さらに上記危険箇所の危険度を検出するものであり、
上記ブレーキ解除タイミング変更手段は、上記危険箇所の危険度が高くなるほど上記ブレーキ解除タイミングを早めることを特徴とする車両のブレーキ制御装置。 In claim 3,
The detection means further detects a risk level of the dangerous place,
The vehicle brake control device according to claim 1, wherein the brake release timing changing means advances the brake release timing as the risk level of the dangerous part increases.
上記検出手段は、自車両を走行目的地に誘導する車載ナビゲーション手段の地図情報に基いて上記検出を行なうことを特徴とする車両のブレーキ制御装置。 In any one of Claims 1 thru | or 4,
The vehicle brake control device according to claim 1, wherein the detection means performs the detection based on map information of an in-vehicle navigation means for guiding the host vehicle to a travel destination.
上記検出手段は、路車間通信によって取得する道路交通情報に基いて上記検出を行なうことを特徴とする車両のブレーキ制御装置。
In any one of Claims 1 thru | or 4,
The vehicle brake control apparatus, wherein the detection means performs the detection based on road traffic information acquired by road-to-vehicle communication.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004333106A JP2006142904A (en) | 2004-11-17 | 2004-11-17 | Brake control device for vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004333106A JP2006142904A (en) | 2004-11-17 | 2004-11-17 | Brake control device for vehicle |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2006142904A true JP2006142904A (en) | 2006-06-08 |
Family
ID=36623098
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004333106A Pending JP2006142904A (en) | 2004-11-17 | 2004-11-17 | Brake control device for vehicle |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2006142904A (en) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010033443A (en) * | 2008-07-30 | 2010-02-12 | Nissan Motor Co Ltd | Vehicle controller |
| JP2010137772A (en) * | 2008-12-12 | 2010-06-24 | Toyota Motor Corp | Brake control device |
| JP2016060358A (en) * | 2014-09-18 | 2016-04-25 | 本田技研工業株式会社 | Vehicle braking control device |
| JP2016524246A (en) * | 2013-06-20 | 2016-08-12 | ローベルト ボッシュ ゲゼルシャフト ミット ベシュレンクテル ハフツング | Method and apparatus for avoiding possible subsequent collisions or for reducing collision accident results |
| JP2016148893A (en) * | 2015-02-10 | 2016-08-18 | マツダ株式会社 | Lane keeping controller |
| WO2016186175A1 (en) * | 2015-05-19 | 2016-11-24 | 株式会社デンソー | Collision avoidance assistance device provided with braking release means, and collision avoidance assistance method |
| JP2016218996A (en) * | 2015-05-19 | 2016-12-22 | 株式会社デンソー | Collision avoidance support apparatus and collision avoidance support method |
| WO2019012921A1 (en) * | 2017-07-11 | 2019-01-17 | 株式会社デンソー | Braking assistance device in vehicle, and braking assistance control method |
| WO2019093235A1 (en) * | 2017-11-08 | 2019-05-16 | 株式会社デンソー | Brake control device |
-
2004
- 2004-11-17 JP JP2004333106A patent/JP2006142904A/en active Pending
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010033443A (en) * | 2008-07-30 | 2010-02-12 | Nissan Motor Co Ltd | Vehicle controller |
| JP2010137772A (en) * | 2008-12-12 | 2010-06-24 | Toyota Motor Corp | Brake control device |
| JP2016524246A (en) * | 2013-06-20 | 2016-08-12 | ローベルト ボッシュ ゲゼルシャフト ミット ベシュレンクテル ハフツング | Method and apparatus for avoiding possible subsequent collisions or for reducing collision accident results |
| US9764719B2 (en) | 2013-06-20 | 2017-09-19 | Robert Bosch Gmbh | Method and device for avoiding a possible subsequent collision and for reducing the accident consequences of a collision |
| JP2016060358A (en) * | 2014-09-18 | 2016-04-25 | 本田技研工業株式会社 | Vehicle braking control device |
| JP2016148893A (en) * | 2015-02-10 | 2016-08-18 | マツダ株式会社 | Lane keeping controller |
| JP2016218996A (en) * | 2015-05-19 | 2016-12-22 | 株式会社デンソー | Collision avoidance support apparatus and collision avoidance support method |
| WO2016186175A1 (en) * | 2015-05-19 | 2016-11-24 | 株式会社デンソー | Collision avoidance assistance device provided with braking release means, and collision avoidance assistance method |
| US10699578B2 (en) | 2015-05-19 | 2020-06-30 | Denso Corporation | Collision avoidance support device provided with braking release means and collision avoidance support method |
| WO2019012921A1 (en) * | 2017-07-11 | 2019-01-17 | 株式会社デンソー | Braking assistance device in vehicle, and braking assistance control method |
| JP2019014454A (en) * | 2017-07-11 | 2019-01-31 | 株式会社デンソー | Braking assist device and braking assist control method for vehicle |
| WO2019093235A1 (en) * | 2017-11-08 | 2019-05-16 | 株式会社デンソー | Brake control device |
| JP2019084985A (en) * | 2017-11-08 | 2019-06-06 | 株式会社デンソー | Brake control device |
| JP7049808B2 (en) | 2017-11-08 | 2022-04-07 | 株式会社デンソー | Braking control device |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6656601B2 (en) | Vehicle control device | |
| US11072331B2 (en) | Vehicle control device, vehicle control method and vehicle control program | |
| JP6222137B2 (en) | Vehicle control device | |
| JP4055656B2 (en) | Collision prediction device | |
| EP1862989B1 (en) | Image forming system | |
| JP4483589B2 (en) | Vehicle information providing device | |
| CN107472248A (en) | The travel controlling system of vehicle | |
| CN106740835A (en) | Adaptive cruise control method, device and vehicle | |
| US20100023232A1 (en) | Vehicle travel speed control method | |
| JP7007879B2 (en) | Pre-congestion deceleration notification device | |
| JP7232100B2 (en) | Vehicle travel control device | |
| JP4432794B2 (en) | Stop control device | |
| JP6954469B2 (en) | Driving support method and driving support device | |
| WO2016103460A1 (en) | Collision avoidance system | |
| JP6871724B2 (en) | Vehicle travel control device | |
| JP2021170165A (en) | Vehicle travel control device | |
| JP7371783B2 (en) | Own vehicle position estimation device | |
| JP6380257B2 (en) | Vehicle information providing device | |
| JP2006142904A (en) | Brake control device for vehicle | |
| JP2006284414A (en) | On-vehicle information terminal, traveling control system of automobile, and traveling control device and method of automobile | |
| JP4766024B2 (en) | Collision prediction device | |
| JP6857014B2 (en) | Vehicle travel control device | |
| JP2019045940A (en) | Automatic driving system | |
| JP2022060073A (en) | Vehicle drive support device | |
| JP2005352607A (en) | Warning device for moving body |