JP2005529709A - 解剖学的単位を動かすための装置と方法 - Google Patents
解剖学的単位を動かすための装置と方法 Download PDFInfo
- Publication number
- JP2005529709A JP2005529709A JP2004515781A JP2004515781A JP2005529709A JP 2005529709 A JP2005529709 A JP 2005529709A JP 2004515781 A JP2004515781 A JP 2004515781A JP 2004515781 A JP2004515781 A JP 2004515781A JP 2005529709 A JP2005529709 A JP 2005529709A
- Authority
- JP
- Japan
- Prior art keywords
- separation
- vertebral body
- anatomical
- separation characteristic
- tissue element
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 60
- 238000000926 separation method Methods 0.000 claims abstract description 244
- 210000004872 soft tissue Anatomy 0.000 claims description 53
- 210000001519 tissue Anatomy 0.000 claims description 48
- 230000007246 mechanism Effects 0.000 claims description 45
- 210000000988 bone and bone Anatomy 0.000 claims description 16
- 230000008859 change Effects 0.000 claims description 16
- 230000004927 fusion Effects 0.000 claims description 10
- 230000006835 compression Effects 0.000 claims description 9
- 238000007906 compression Methods 0.000 claims description 9
- 230000002980 postoperative effect Effects 0.000 claims description 4
- 238000001356 surgical procedure Methods 0.000 abstract description 13
- 238000005259 measurement Methods 0.000 description 10
- 238000010586 diagram Methods 0.000 description 8
- 238000003780 insertion Methods 0.000 description 8
- 230000037431 insertion Effects 0.000 description 6
- 230000004044 response Effects 0.000 description 5
- 238000013459 approach Methods 0.000 description 4
- 210000002808 connective tissue Anatomy 0.000 description 3
- 230000008878 coupling Effects 0.000 description 3
- 238000010168 coupling process Methods 0.000 description 3
- 238000005859 coupling reaction Methods 0.000 description 3
- 230000008713 feedback mechanism Effects 0.000 description 3
- 239000007943 implant Substances 0.000 description 3
- 230000000007 visual effect Effects 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 210000000577 adipose tissue Anatomy 0.000 description 2
- 238000009530 blood pressure measurement Methods 0.000 description 2
- 210000000845 cartilage Anatomy 0.000 description 2
- 230000013011 mating Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 208000002847 Surgical Wound Diseases 0.000 description 1
- 201000007201 aphasia Diseases 0.000 description 1
- 210000001367 artery Anatomy 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 210000004369 blood Anatomy 0.000 description 1
- 239000008280 blood Substances 0.000 description 1
- 210000004204 blood vessel Anatomy 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000001054 cortical effect Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 210000001162 elastic cartilage Anatomy 0.000 description 1
- 210000000968 fibrocartilage Anatomy 0.000 description 1
- 210000003035 hyaline cartilage Anatomy 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 210000003205 muscle Anatomy 0.000 description 1
- 230000002107 myocardial effect Effects 0.000 description 1
- 230000001737 promoting effect Effects 0.000 description 1
- 238000002271 resection Methods 0.000 description 1
- 210000002027 skeletal muscle Anatomy 0.000 description 1
- 210000002460 smooth muscle Anatomy 0.000 description 1
- 125000006850 spacer group Chemical group 0.000 description 1
- 210000000115 thoracic cavity Anatomy 0.000 description 1
- 230000002792 vascular Effects 0.000 description 1
- 210000003462 vein Anatomy 0.000 description 1
Images







Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/02—Surgical instruments, devices or methods for holding wounds open, e.g. retractors; Tractors
- A61B17/0206—Surgical instruments, devices or methods for holding wounds open, e.g. retractors; Tractors with antagonistic arms as supports for retractor elements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/02—Surgical instruments, devices or methods for holding wounds open, e.g. retractors; Tractors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/02—Surgical instruments, devices or methods for holding wounds open, e.g. retractors; Tractors
- A61B17/025—Joint distractors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B2017/00017—Electrical control of surgical instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/02—Surgical instruments, devices or methods for holding wounds open, e.g. retractors; Tractors
- A61B17/025—Joint distractors
- A61B2017/0256—Joint distractors for the spine
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/061—Measuring instruments not otherwise provided for for measuring dimensions, e.g. length
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/064—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2/46—Special tools for implanting artificial joints
- A61F2/4603—Special tools for implanting artificial joints for insertion or extraction of endoprosthetic joints or of accessories thereof
- A61F2/4611—Special tools for implanting artificial joints for insertion or extraction of endoprosthetic joints or of accessories thereof of spinal prostheses
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2/46—Special tools for implanting artificial joints
- A61F2/4657—Measuring instruments used for implanting artificial joints
- A61F2002/4658—Measuring instruments used for implanting artificial joints for measuring dimensions, e.g. length
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Heart & Thoracic Surgery (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Prostheses (AREA)
- Surgical Instruments (AREA)
Abstract
Description
Claims (35)
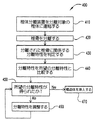
- 解剖学的単位の少なくとも1つの分離特性に関する客観的データを提供するように作動可能なフィードバックシステムを有する分離器具を提供する段階と、
第1解剖学的単位と第2解剖学的単位とを提供するために患者に切開を施す段階と、
前記第1解剖学的単位と前記第2解剖学的単位との少なくとも一方に接触させて前記分離器具を配置する段階と、
前記第1解剖学的単位と前記第2解剖学的単位とを前記分離器具で分離する段階と、
前記第1解剖学的単位と前記第2解剖学的単位とを分離するために加えられる力を含む少なくとも1つの分離特性を、前記フィードバックシステムで客観的に測定する段階と、
前記測定された分離特性を所望の分離特性と比較する段階と、
前記測定された分離特性が前記所望の分離特性に一致している場合は、前記分離された解剖学的単位の間の空間に構造体を配置する段階と、を具備する患者の体内に脊椎構造体を配置する方法。 - 前記測定された分離特性を閾値分離特性と比較する段階と、
前記閾値分離特性よりも下の第2の測定された分離特性を得るために、前記第1及び第2解剖学的単位を互いに対して動かす段階と、を更に含んでいる請求項1に記載の方法。 - 前記空間に構造体を配置する段階は、分離された前記第1解剖学的単位と前記第2解剖学的単位との間の前記空間を通して前記構造体を配置する段階を含んでいる、請求項1に記載の方法。
- 前記第1解剖学的単位と前記第2解剖学的単位とは軟組織要素を含んでいる、請求項3に記載の方法。
- 前記第1解剖学的単位と前記第2解剖学的単位とは骨性要素を含んでいる、請求項3に記載の方法。
- 前記所望の分離特性は、前記構造体が前記第1骨性組織要素と前記第2骨性組織要素とに係合され、前記分離器具が前記第1骨性組織要素と前記第2骨性組織要素との少なくとも一方から解放されたときに前記構造体に加えられる圧縮力に対応している、請求項5に記載の方法。
- 前記測定された分離特性が前記所望の分離特性に実質的に一致したとき、前記構造体を前記第1骨性組織要素と前記第2骨性組織要素とに係合させる段階を更に含んでいる、請求項6に記載の方法。
- 前記構造体は、前記第1骨性組織要素と前記第2骨性組織要素との間の椎骨間空間に配置された移植片である、請求項7に記載の方法。
- 圧縮力を維持するために前記第1骨性組織要素と前記第2骨性組織要素とに板を係合する段階を更に含んでいる、請求項7に記載の方法。
- 前記構造体は、前記第1骨性組織要素と前記第2骨性組織要素とにより画定された椎骨間空間に亘って伸張している板である、請求項7に記載の方法。
- 第1椎体と第2椎体とを分離するための方法において、
前記第1椎体と前記第2椎体との少なくとも1つの分離特性に関する客観的データを提供するために分離器具と関係付けられたフィードバックシステムを含む前記分離器具を、前記第1椎体と前記第2椎体とに接触させて配置する段階と、
前記第1椎体と前記第2椎体とを分離する段階と、
前記第1椎体と前記第2椎体とを分離するために加えられる力の客観的表示を含む、前記分離された前記第1椎体と前記第2椎体とに関係する分離特性を判定する段階と、
前記分離特性が所定の分離特性と実質的に一致しているか否か判定する段階と、
前記判定に基づいて前記分離特性を調整する段階と、を具備する方法。 - 前記分離特性が前記所定の分離特性と実質的に一致している場合は、構造体を前記第1椎体と前記第2椎体とに係合させる段階を更に含んでいる、請求項11に記載の方法。
- 前記構造体を係合させる段階は、前記第1椎体と前記第2椎体との間の椎体間空間に位置する移植片を配置する段階を含んでいる、請求項12に記載の方法。
- 前記構造体を係合させる段階は、板を前記第1椎体と前記第2椎体とに係合させる段階を更に含んでいる、請求項13に記載の方法。
- 前記構造体を係合させる段階は、板を前記第1椎体と前記第2椎体とに係合させる段階を更に含んでいる、請求項12に記載の方法。
- 前記力は圧力として表示される、請求項11に記載の方法。
- 前記力は、分離距離の変化当たりの力の変化として表示される、請求項11に記載の方法。
- 前記所定の分離特性は、前記分離器具が前記第1椎体と前記第2椎体との少なくとも一方から解放されたときに、前記第1椎体と前記第2椎体との間に係合されている構造体に対して前記第1椎体と前記第2椎体とが加える残留圧縮力に対応している、請求項11に記載の方法。
- 前記分離特性が前記所定の分離特性と実質的に一致している場合は、前記構造体を前記第1椎体と前記第2椎体とに係合させる段階を更に含んでいる、請求項18に記載の方法。
- 前記分離特性を調整する段階は、前記第1椎体と前記第2椎体との間の椎体間空間に構造体を係合させた後で前記第1椎体と前記第2椎体とに圧縮荷重を加えて、所望の術後圧縮荷重を前記構造体に作用させる段階を更に含んでいる、請求項11に記載の方法。
- 前記移植片は椎体間癒合装置である、請求項20に記載の方法。
- 前記術後圧縮荷重を維持するために、前記第1椎体と前記第2椎体とに板を係合する段階を更に含んでいる、請求項20に記載の方法。
- 前記移植片は人工円板である、請求項20に記載の方法。
- 前記構造体は前記第1椎体と前記第2椎体とに係合された板である、請求項20に記載の方法。
- 前記圧縮荷重は前記分離器具で加えられ、前記圧縮荷重の客観的表示を提供する、請求項19に記載の方法。
- 前記分離特性を調整する段階は、前記第1椎体と前記第2椎体とを分離するために加えられる力を減じる段階を含んでいる、請求項11に記載の方法。
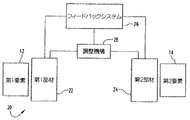
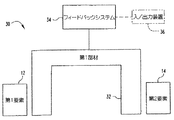
- 第1軟組織要素と第2軟組織要素とを互いに対して動かすための装置において、
両端の間を伸張している係合可能部分を有するコネクタと、
前記コネクタから伸張し、前記第1軟組織要素と接触可能な第1部材と、
前記コネクタから伸張し、前記第1軟組織要素から離間した前記第2組織要素に接触可能である第2部材であって、前記第1部材に関して動かすことのできる第2部材と、
前記第1部材及び前記第2部材の少なくとも一方に関係付けられ、前記第1軟組織要素と前記第2軟組織要素との分離に関係する実際の分離特性を判定し、これに関する客観的なフィードバックを提供するシステムと、を備えており、
前記第1部材と前記第2部材は、所望の分離特性を得るために前記客観的なフィードバックに従って前記実際の分離特性を調整するために、互いに対して動かすことができる装置。 - 前記客観的フィードバックは、前記第1軟組織要素と前記第2軟組織要素との間の分離距離と、前記第1軟組織要素と前記第2軟組織要素とを分離するために加えられる力と、前記第1軟組織要素と前記第2軟組織要素との間の分離距離の変化当たりの力の変化と、から成る群の内の少なくとも1つを含んでいる、請求項27に記載の装置。
- 前記コネクタと前記第2部材との間に連結され、前記第2部材を前記第1部材に対して作動可能に動かすような調整機構を更に含んでいる、請求項27に記載の装置。
- 前記第1部材と前記第2部材とを、互いに関して所定位置に固定するための係止機構を更に含んでいる、請求項29に記載の装置。
- 前記係止機構は、前記接続部材に沿って設けられたつめ車面に選択的に係合可能なばね負荷付きレバーを含んでいる、請求項30に記載の装置。
- 前記調整機構は、前記つめ車面と係合可能な多数の歯を周りに有するホイールを含んでいる、請求項31に記載の装置。
- 前記第1部材と前記第2部材との少なくとも一方に関係付けられたセンサーを含んでいる、請求項27に記載の装置。
- 前記センサーは、歪ゲージと、ばねと、圧力センサーとから成る群より選択された少なくとも1つを含んでいる、請求項33に記載の装置。
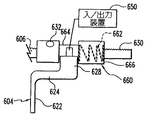
- 前記第2部材は、前記コネクタの周りに配置されたハウジングを含んでおり、
前記センサーは、前記ハウジング内に、前記第2部材の組織接触部分と連結されたばねを含んでおり、前記ばねは、前記組織接触部分にかかる荷重に応じて、前記実際の分離特性に対応する表示を提供する、請求項33に記載の装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US39013102P | 2002-06-19 | 2002-06-19 | |
| US10/260,891 US20030236472A1 (en) | 2002-06-19 | 2002-09-30 | Systems and methods for moving anatomical elements |
| PCT/US2003/018592 WO2004000131A1 (en) | 2002-06-19 | 2003-06-12 | Systems and methods for moving anatomical elements comprising feedback |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005529709A true JP2005529709A (ja) | 2005-10-06 |
| JP2005529709A5 JP2005529709A5 (ja) | 2006-07-27 |
Family
ID=29739194
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004515781A Pending JP2005529709A (ja) | 2002-06-19 | 2003-06-12 | 解剖学的単位を動かすための装置と方法 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US20030236472A1 (ja) |
| EP (1) | EP1515647A1 (ja) |
| JP (1) | JP2005529709A (ja) |
| CN (1) | CN1662183A (ja) |
| AU (1) | AU2003251507A1 (ja) |
| CA (1) | CA2490230A1 (ja) |
| WO (1) | WO2004000131A1 (ja) |
Families Citing this family (51)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2004032794A2 (en) * | 2002-10-10 | 2004-04-22 | Mekanika, Inc. | Apparatus and method for restoring biomechanical function to a motion segment unit of the spine |
| US7775974B2 (en) * | 2004-07-23 | 2010-08-17 | North Carolina State University | Force-determining retraction device and associated method |
| US7641690B2 (en) | 2004-08-23 | 2010-01-05 | Abdou M Samy | Bone fixation and fusion device |
| WO2006041963A2 (en) | 2004-10-05 | 2006-04-20 | Abdou M S | Devices and methods for inter-vertebral orthopedic device placement |
| WO2006058221A2 (en) | 2004-11-24 | 2006-06-01 | Abdou Samy M | Devices and methods for inter-vertebral orthopedic device placement |
| US7615055B2 (en) | 2005-03-31 | 2009-11-10 | Depuy Products, Inc. | Method and apparatus for use in balancing ligaments of a knee |
| WO2007044705A2 (en) | 2005-10-07 | 2007-04-19 | Abdou Samy M | Devices and methods for inter-verterbral orthopedic device placement |
| US7691130B2 (en) * | 2006-01-27 | 2010-04-06 | Warsaw Orthopedic, Inc. | Spinal implants including a sensor and methods of use |
| US8635082B2 (en) | 2006-05-25 | 2014-01-21 | DePuy Synthes Products, LLC | Method and system for managing inventories of orthopaedic implants |
| US8303630B2 (en) | 2006-07-27 | 2012-11-06 | Samy Abdou | Devices and methods for the minimally invasive treatment of spinal stenosis |
| WO2008019119A2 (en) * | 2006-08-04 | 2008-02-14 | Robinson James C | Bone screw removal system |
| US7896884B2 (en) * | 2006-12-01 | 2011-03-01 | Aesculap, Inc. | Interbody distractor |
| WO2008106140A2 (en) | 2007-02-26 | 2008-09-04 | Abdou M Samy | Spinal stabilization systems and methods of use |
| US7993291B2 (en) * | 2007-05-29 | 2011-08-09 | Microsoft Corporation | Haptic support and virtual activity monitor |
| EP2011442A1 (en) * | 2007-07-02 | 2009-01-07 | Berner Fachhochschule, Technik und Informatik (TI) | Pliers for separating two adjacent bone segments |
| US8343190B1 (en) | 2008-03-26 | 2013-01-01 | Nuvasive, Inc. | Systems and methods for spinous process fixation |
| US8845527B2 (en) * | 2008-04-11 | 2014-09-30 | Physcient, Inc. | Methods and devices to decrease tissue trauma during surgery |
| AU2009246299B2 (en) * | 2008-05-14 | 2015-02-26 | Physcient, Inc. | Methods and devices to decrease tissue trauma during surgery |
| US8197489B2 (en) | 2008-06-27 | 2012-06-12 | Depuy Products, Inc. | Knee ligament balancer |
| US8556830B2 (en) * | 2009-03-31 | 2013-10-15 | Depuy | Device and method for displaying joint force data |
| US8597210B2 (en) * | 2009-03-31 | 2013-12-03 | Depuy (Ireland) | System and method for displaying joint force data |
| US8721568B2 (en) | 2009-03-31 | 2014-05-13 | Depuy (Ireland) | Method for performing an orthopaedic surgical procedure |
| US8551023B2 (en) | 2009-03-31 | 2013-10-08 | Depuy (Ireland) | Device and method for determining force of a knee joint |
| US8740817B2 (en) * | 2009-03-31 | 2014-06-03 | Depuy (Ireland) | Device and method for determining forces of a patient's joint |
| US9402610B2 (en) | 2009-04-13 | 2016-08-02 | Physcient, Inc. | Rib-protecting devices for thoracoscopic surgery, and related methods |
| US8795335B1 (en) | 2009-11-06 | 2014-08-05 | Samy Abdou | Spinal fixation devices and methods of use |
| US8764806B2 (en) | 2009-12-07 | 2014-07-01 | Samy Abdou | Devices and methods for minimally invasive spinal stabilization and instrumentation |
| WO2011146739A1 (en) | 2010-05-19 | 2011-11-24 | Physcient, Inc. | Methods and devices to decrease tissue trauma during surgery |
| USD757943S1 (en) | 2011-07-14 | 2016-05-31 | Nuvasive, Inc. | Spinous process plate |
| US8882805B1 (en) | 2011-08-02 | 2014-11-11 | Lawrence Maccree | Spinal fixation system |
| GB201115411D0 (en) | 2011-09-07 | 2011-10-19 | Depuy Ireland | Surgical instrument |
| US8845728B1 (en) | 2011-09-23 | 2014-09-30 | Samy Abdou | Spinal fixation devices and methods of use |
| US20130226240A1 (en) | 2012-02-22 | 2013-08-29 | Samy Abdou | Spinous process fixation devices and methods of use |
| US9381011B2 (en) | 2012-03-29 | 2016-07-05 | Depuy (Ireland) | Orthopedic surgical instrument for knee surgery |
| US10098761B2 (en) | 2012-03-31 | 2018-10-16 | DePuy Synthes Products, Inc. | System and method for validating an orthopaedic surgical plan |
| US10206792B2 (en) | 2012-03-31 | 2019-02-19 | Depuy Ireland Unlimited Company | Orthopaedic surgical system for determining joint forces of a patients knee joint |
| US9545459B2 (en) | 2012-03-31 | 2017-01-17 | Depuy Ireland Unlimited Company | Container for surgical instruments and system including same |
| US10448977B1 (en) | 2012-03-31 | 2019-10-22 | Ali H. MESIWALA | Interspinous device and related methods |
| US10070973B2 (en) | 2012-03-31 | 2018-09-11 | Depuy Ireland Unlimited Company | Orthopaedic sensor module and system for determining joint forces of a patient's knee joint |
| US9198767B2 (en) | 2012-08-28 | 2015-12-01 | Samy Abdou | Devices and methods for spinal stabilization and instrumentation |
| US9320617B2 (en) | 2012-10-22 | 2016-04-26 | Cogent Spine, LLC | Devices and methods for spinal stabilization and instrumentation |
| US9820869B2 (en) * | 2015-10-02 | 2017-11-21 | Henry E. Aryan | Intervertebral pressure monitor |
| US10857003B1 (en) | 2015-10-14 | 2020-12-08 | Samy Abdou | Devices and methods for vertebral stabilization |
| US10744000B1 (en) | 2016-10-25 | 2020-08-18 | Samy Abdou | Devices and methods for vertebral bone realignment |
| US10973648B1 (en) | 2016-10-25 | 2021-04-13 | Samy Abdou | Devices and methods for vertebral bone realignment |
| EP3531941A1 (en) * | 2016-10-26 | 2019-09-04 | McAfee, Paul C. | Distraction tools for spinal surgery |
| US10952714B1 (en) * | 2017-07-14 | 2021-03-23 | OrtoWay AB | Apparatus, methods and systems for spine surgery |
| US11179248B2 (en) | 2018-10-02 | 2021-11-23 | Samy Abdou | Devices and methods for spinal implantation |
| US11678906B2 (en) | 2019-09-09 | 2023-06-20 | Amplify Surgical, Inc. | Multi-portal surgical systems, cannulas, and related technologies |
| US11464648B2 (en) * | 2019-09-09 | 2022-10-11 | Amplify Surgical, Inc. | Multi-portal surgical systems |
| US11950770B1 (en) | 2022-12-01 | 2024-04-09 | Amplify Surgical, Inc. | Multi-portal split cannulas, endoscopic hemostatic dispensers and surgical tools |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4432376A (en) * | 1980-01-30 | 1984-02-21 | Huszar Gabor B | Method for determining the extensibility of selected non-excised tissue of the uterine cervix, ear or skin |
| BE895728A (fr) * | 1983-01-28 | 1983-05-16 | Region Wallonne Represente Par | Procede de controle de la stabilite d'un montage orthopedique constitue d'une barre de fixation externe utilisee pour la reduction des fractures |
| US4501266A (en) * | 1983-03-04 | 1985-02-26 | Biomet, Inc. | Knee distraction device |
| DE3707097A1 (de) * | 1986-12-05 | 1988-06-09 | S & G Implants Gmbh | Zange zum spreizen von wirbelsaeulenkoerpern |
| US4899761A (en) * | 1988-03-31 | 1990-02-13 | Brown Mark D | Apparatus and method for measuring spinal instability |
| US4892545A (en) * | 1988-07-14 | 1990-01-09 | Ohio Medical Instrument Company, Inc. | Vertebral lock |
| US5201325A (en) * | 1989-09-01 | 1993-04-13 | Andronic Devices Ltd. | Advanced surgical retractor |
| US5213112A (en) * | 1992-01-29 | 1993-05-25 | Pfizer Hospital Products Group, Inc. | Tension meter for orthopedic surgery |
| FR2709248B1 (fr) * | 1993-08-27 | 1995-09-29 | Martin Jean Raymond | Matériel ancillaire de pose d'une instrumentation rachidienne. |
| US5456724A (en) * | 1993-12-15 | 1995-10-10 | Industrial Technology Research Institute | Load sensor for bone graft |
| US5470345A (en) * | 1994-06-16 | 1995-11-28 | Medtronic, Inc. | Implantable medical device with multi-layered ceramic enclosure |
| US5769781A (en) * | 1995-11-13 | 1998-06-23 | Chappuis; James L. | Protector retractor |
| US6139493A (en) * | 1998-07-08 | 2000-10-31 | Koros; Tibor B. | Retractor with adjustable length blades and light pipe guides |
-
2002
- 2002-09-30 US US10/260,891 patent/US20030236472A1/en not_active Abandoned
-
2003
- 2003-06-12 EP EP03761058A patent/EP1515647A1/en not_active Withdrawn
- 2003-06-12 CA CA002490230A patent/CA2490230A1/en not_active Abandoned
- 2003-06-12 JP JP2004515781A patent/JP2005529709A/ja active Pending
- 2003-06-12 WO PCT/US2003/018592 patent/WO2004000131A1/en active Application Filing
- 2003-06-12 CN CN038142821A patent/CN1662183A/zh active Pending
- 2003-06-12 AU AU2003251507A patent/AU2003251507A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| CA2490230A1 (en) | 2003-12-31 |
| AU2003251507A1 (en) | 2004-01-06 |
| US20030236472A1 (en) | 2003-12-25 |
| EP1515647A1 (en) | 2005-03-23 |
| CN1662183A (zh) | 2005-08-31 |
| WO2004000131A1 (en) | 2003-12-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2005529709A (ja) | 解剖学的単位を動かすための装置と方法 | |
| US11426292B2 (en) | Spinal implant system and method | |
| US11446159B2 (en) | Spinal implant system and method | |
| EP3860525B1 (en) | Devices for spinal implantation | |
| US6723058B2 (en) | Device and method for determining parameters of blind voids | |
| US20060074431A1 (en) | Disc distraction instrument and measuring device | |
| US8864772B2 (en) | Motion segment repair systems and methods | |
| US8597299B2 (en) | Instrumentation and method for providing surgical access to a spine | |
| WO2021055323A1 (en) | Spinal fixation system and kit | |
| CN112294374A (zh) | 外科手术仪器和使用方法 | |
| US9289248B2 (en) | Assembly with offset allowing vertebral distraction by axial rotation of a concentric member | |
| CN113710174B (zh) | 手术系统和方法 | |
| US20080262501A1 (en) | Multi-function corpectomy instrument | |
| CN115334986A (zh) | 外科系统和方法 | |
| Rauzzino et al. | Anterior lumbar fusion with titanium threaded and mesh interbody cages | |
| US20090088847A1 (en) | Surgical instrument system | |
| KR20050016581A (ko) | 해부요소들을 가변시키기 위한 시스템 및 방법 | |
| RU2780775C1 (ru) | Устройство для вентральной дистракции тел позвонков | |
| Kostuik | Anterior Kostuik-Harrington Distraction Systems for the Treament of Kyphotic Deformities | |
| Iorfida | A Load Transfer Model Versus Load Sharing Model Comparison of the Lumbar Spine With a Discectomy and Compact Cotrel-Dubousset Anterior Levo Lateral Instrumentation |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060607 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060607 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20061011 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090126 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20090624 |