JP2005353092A - プロセス制御システム - Google Patents
プロセス制御システム Download PDFInfo
- Publication number
- JP2005353092A JP2005353092A JP2005212592A JP2005212592A JP2005353092A JP 2005353092 A JP2005353092 A JP 2005353092A JP 2005212592 A JP2005212592 A JP 2005212592A JP 2005212592 A JP2005212592 A JP 2005212592A JP 2005353092 A JP2005353092 A JP 2005353092A
- Authority
- JP
- Japan
- Prior art keywords
- function
- process control
- control system
- computer
- plant
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Landscapes
- Stored Programmes (AREA)
- Programmable Controllers (AREA)
- Testing And Monitoring For Control Systems (AREA)
Abstract
【解決手段】 プロセス制御システムを構成する機能をオブジェクト化し、各オブジェクトは、メソッドとデータが一体となってカプセル化され、タグ名を付けられて記憶手段に格納されている。タグに独立したオブジェクトが定義され、新たな機能の追加、既存機能の変更、既存機能の削除がタグ毎に行なわれ、追加、変更、削除が行なわれたときに、追加、変更、削除の対象オブジェクト以外のオブジェクトに影響を与えない構成にした。
【選択図】 図1
Description
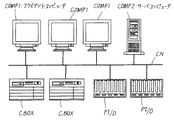
図10で、操作監視ステーションICSと制御ステーションFCSは通信バスBS上に接続されている。制御ステーションFCSはプラントPLTを制御する。プラントの規模に応じて複数の制御ステーションが分散配置されている。
入力手段3はキーボード、マウス等で構成され、プラントの操作や制御運転を行うためのデータ入力等を行う。
監視手段4はプラントの監視を行う。操作手段5はプラントを制御運転するための操作を行う。監視や操作の結果は表示手段1で表示される。
通信手段6は通信バスBSを介して各制御ステーションとのデータ授受を一定の通信規約に従って行う。
通信手段11は通信バスBSを介して操作監視ステーションや各制御ステーションとのデータ授受を一定の通信規約に従って行う。
例えば、センサSNが出力した4〜20mA,1〜5Vのアナログ信号がI/Oユニット10に入力される。この入力をもとに制御ユニットCUは制御演算を行い、操作量を求める。この操作量は4〜20mA,1〜5Vのアナログ信号としてI/Oユニット10から出力され、この出力によりバルブV1,V2の開度が制御される。
図11に示すように、データはデータベースDBに、プログラムはプログラムライブラリPLにそれぞれ格納されている。
データベースDB内にはタグ名が付けられたデータブロックが格納されている。FIC101,PIC102,PI201等がタグ名である。
プログラムライブラリPLには各データブロックに対応したファンクションブロックのデータ処理に用いるプログラムが用意されている。複数のプログラムが用意されているのは、 ファンクションブロックの処理アルゴリズムが複数種類あるためである。
インタプリタINTはデータブロックを順次に読み出し、読み出したデータブロックの中で指定されている処理プログラムをプログラムライブラリPLの中から選んで呼び出す。呼び出された処理プログラムは、対応するデータブロック内のデータを使って演算処理を実行する。
例えば、インタプリタINTはデータブロックFIC101を読み出し、その中で指定されている処理プログラムPIDをプログラムライブラリPL中から選んで呼び出す。処理プログラムPIDはデータブロックFIC101内のデータを使って演算処理を実行する。
監視機能、制御機能等の機能が各々の目的に最適化した設計となっているため、個々に専用のハードウェアとソフトウェア基盤(OS)を必要としていた。
例えば、制御ユニットCUに実装する制御機能は、I/Oユニット10の専用インタフェイスを前提に設計されるため、制御機能とI/Oユニット10は同じハードウェア(制御ステーションFCS)上に実装されていなければならないというように、物理的な制約を被った。
また、ある機能を別の装置上に実装しようとすると、プログラムの修正や再コンパイルといった機能の再構成作業を必要とした。
図11に示すように、プログラムとデータが別々に管理されている。プログラムは、システムにある全種類のファンクションブロックの処理アルゴリズムが一体でライブラリ化されている。従って、ファンクションブロックのアルゴリズムを変更しようとすると、たとえ変更箇所が1種類のファンクションブロック向けのアルゴリズムであってもプログラムライブラリ全体を更新しなければならない。
機能を変更・追加するには、プログラムライブラリ全体の再コンパイルとローディングが必要で、稼働中のシステムを一旦停止させなければならない。
図11のプログラムライブラリの例で示されるように、実際に使う機能も、使わない機能も一体化して実装されていた。このため、システム規模の大小に関わらず必要な共通部分の割合が多くなり、小規模システムを構築したくてもコストが高くなってしまう。すなわち、機能の区分けをユーザの希望に応じて決められなかった。
前記第1のコンピュータに設けられ、プロセス制御に必要な情報の表示を担当するとともに、プロセス制御の運転操作を担当する表示操作機能を持つオブジェクトを格納する第1の記憶手段と、
前記第2のコンピュータに設けられ、プラントから入力されたプロセス入力をもとに制御演算により操作量を求め、この操作量をプラントに与える制御機能を持つオブジェクトを格納する第2の記憶手段と、
前記第3のコンピュータに設けられ、プロセス制御システムで扱うプラントの信号を入出力するプロセス入出力機能を持つオブジェクトを格納する第3の記憶手段と、
前記第1乃至第3のコンピュータにそれぞれ設けられ、前記ネットワークを介して各オブジェクト間の通信を行なう通信手段と、
を有し、前記通信手段により前記各オブジェクトが持つ各機能間でデータの授受を行い、プロセス制御システムとしての機能を果たし、
前記各オブジェクトは、メソッドとデータが一体となってカプセル化され、タグ名を付けられて前記各記憶手段に格納されていて、
前記タグに独立したオブジェクトが定義され、新たな機能の追加、既存機能の変更、既存機能の削除が前記タグ毎に行なわれ、追加、変更、削除が行なわれたときに、追加、変更、削除の対象オブジェクト以外のオブジェクトに影響を与えないことを特徴とするプロセス制御システム。
該第4のコンピュータに設けられ、オブジェクトを定義するエンジニアリング手段と、
を有することを特徴とする(1)乃至(4)のいずれかに記載のプロセス制御システム。
図1は本発明の一実施例を示す構成図である。図1で前出の図と同一のものは同一符号を付ける。以下、図において同様とする。
図1で、複数のコンピュータ21〜25はネットワーク30上に接続されている。
オブジェクトOBJ1は、入力手段3からの入力をメッセージとして起動し、制御機能を持つオブジェクトやプロセス入出力機能を持つオブジェクトを介してプラントPLTに対して操作を行うとともに、表示制御手段2に働きかけて操作の結果を表示手段1に表示する。
オブジェクト情報用メモリ231にはオブジェクト情報ODが格納されている。
オブジェクトOBJ3は、定義・生成したオブジェクトの情報を、オブジェクト情報用メモリ231に格納する。また、オブジェクトOBJ3は、オブジェクト情報用メモリ231の情報をもとに、オブジェクトを組み合わせてシステムを構成する。
オブジェクトOBJ4は、例えば、プラントPLTのセンサSNから入力されたプロセス入力をもとに制御演算を行い、操作量を求める。この操作量をプラントPLTにあるバルブVに与える。
オブジェクトOBJ5は信号変換器251に働きかけてプラントPLTと信号を授受する。例えば、センサSNが出力した4〜20mA,1〜5Vのアナログ信号を信号変換器251を介して入力し、4〜20mA,1〜5Vの操作量の信号を信号変換器251を介してバルブVに与える。
さらに、1つの機能が複数のオブジェクトで実現されていてもよい。
(1)ライフサイクル管理手段42を設け、オブジェクトの生成、消滅、複写、移動等を管理した。
(2)明示的に定義されたインタフェイス手段を設け、このインタフェイス手段の定義とオブジェクトの実装を切り離した。
図2に示すように、手続(メソッド)とデータが一体となったオブジェクトが、タグ名を付けられて記憶手段41に格納されている。メソッドはプログラムに相当する。FIC101,PIC102はタグ名である。
各オブジェクトには実行処理用メソッドRunFB、読出処理メソッドGetParameter、書込メソッドSetParameterが設けられている。
ユーザが機能として認識する単位であるタグに独立したオブジェクトを定義しているため、新たな機能の追加、既存機能の変更、既存機能の削除をタグ毎に行うことができる。また、追加、変更、削除を行ったときに、追加、変更、削除の対象オブジェクト以外のオブジェクトに影響を与えない。
実行処理メソッドだけでなく、オブジェクトに関わる全ての手続がメソッドとしてオブジェクト単位に定義されるため、機能の独立性が保たれる。
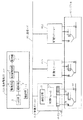
図3で、制御機能を持つオブジェクトOBJはデータD1とメソッドM1,M2,M3を一体にした構成になっている。
オブジェクトOBJはPI制御を行うオブジェクトである。データD1には運転モード(図の例では自動運転モードAUTになっている)、プロセス量PV、設定量SV、プロセスの出力量MVが記述されている。メソッドM1には実行処理用メソッドRunFBとPI制御を実行するための制御演算プログラムが記述されている。メソッドM2には読出処理メソッドGetParameterとパラメータを読み出すためのプログラムが記述されている。メソッドM3には書込メソッドSetParameterとパラメータを書き込むためのプログラムが記述されている。
読出処理メソッドGetParameterが起動されると、データD1の指定されたパラメータを読み出す。
書込メソッドSetParameterが起動されると、データD1の指定されたパラメータを書き込む。
プロセス入出力装置PI/Oがインテリジェンスを持っているときは、プロセス入出力機能を持ったオブジェクトはプロセス入出力装置PI/Oに実装し、他のオブジェクトはコンピュータCOMPに実装してもよい。
なお、制御機能を持つオブジェクトは制御用コンピュータCBOXに実装し、プロセス入出力機能を持つオブジェクトはプロセス入出力装置PI/Oに実装している。
30 ネットワーク
41 記憶手段
42 ライフサイクル管理手段
43 通信手段
OBJ1,OBJ2,OBJ4,OBJ5 オブジェクト
F フィールド機器
PI/O プロセス入出力装置
B1 専用バス
Claims (5)
- ネットワーク上に接続された第1乃至第3のコンピュータと、
前記第1のコンピュータに設けられ、プロセス制御に必要な情報の表示を担当するとともに、プロセス制御の運転操作を担当する表示操作機能を持つオブジェクトを格納する第1の記憶手段と、
前記第2のコンピュータに設けられ、プラントから入力されたプロセス入力をもとに制御演算により操作量を求め、この操作量をプラントに与える制御機能を持つオブジェクトを格納する第2の記憶手段と、
前記第3のコンピュータに設けられ、プロセス制御システムで扱うプラントの信号を入出力するプロセス入出力機能を持つオブジェクトを格納する第3の記憶手段と、
前記第1乃至第3のコンピュータにそれぞれ設けられ、前記ネットワークを介して各オブジェクト間の通信を行なう通信手段と、
を有し、前記通信手段により前記各オブジェクトが持つ各機能間でデータの授受を行い、プロセス制御システムとしての機能を果たし、
前記各オブジェクトは、メソッドとデータが一体となってカプセル化され、タグ名を付けられて前記各記憶手段に格納されていて、
前記タグに独立したオブジェクトが定義され、新たな機能の追加、既存機能の変更、既存機能の削除が前記タグ毎に行なわれ、追加、変更、削除が行なわれたときに、追加、変更、削除の対象オブジェクト以外のオブジェクトに影響を与えないことを特徴とするプロセス制御システム。 - 前記表示操作機能を持つオブジェクトは、プラントの操作や制御運転を行なうための入力をメッセージとして起動し、前記制御機能を持つオブジェクト及び前記プロセス入出力機能を持つオブジェクトを介してプラントに対して操作を行なうとともに、操作の結果を表示手段に表示することを特徴とする請求項1記載のプロセス制御システム。
- 前記第1乃至第3のコンピュータにそれぞれ設けられ、オブジェクトを生成するとともに、不要になったオブジェクトを消滅するライフサイクル管理手段を有することを特徴とする請求項1または2記載のプロセス制御システム。
- 前記ライフサイクル管理手段は、生成したオブジェクトの名前を管理することを特徴とする請求項3記載のプロセス制御システム。
- ネットワーク上に接続された第4のコンピュータと、
該第4のコンピュータに設けられ、オブジェクトを定義するエンジニアリング手段と、
を有することを特徴とする請求項1乃至4のいずれかに記載のプロセス制御システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005212592A JP2005353092A (ja) | 2005-07-22 | 2005-07-22 | プロセス制御システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005212592A JP2005353092A (ja) | 2005-07-22 | 2005-07-22 | プロセス制御システム |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP10197033A Division JP2000029851A (ja) | 1998-07-13 | 1998-07-13 | プロセス制御システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005353092A true JP2005353092A (ja) | 2005-12-22 |
Family
ID=35587463
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005212592A Pending JP2005353092A (ja) | 2005-07-22 | 2005-07-22 | プロセス制御システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005353092A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101436063A (zh) * | 2007-11-13 | 2009-05-20 | 费舍-柔斯芒特系统股份有限公司 | 用于执行辅助配方及批处理配方的方法及设备 |
| JP2020135550A (ja) * | 2019-02-21 | 2020-08-31 | 株式会社東芝 | プラント監視システムおよびプラント監視方法 |
-
2005
- 2005-07-22 JP JP2005212592A patent/JP2005353092A/ja active Pending
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101436063A (zh) * | 2007-11-13 | 2009-05-20 | 费舍-柔斯芒特系统股份有限公司 | 用于执行辅助配方及批处理配方的方法及设备 |
| JP2009123214A (ja) * | 2007-11-13 | 2009-06-04 | Fisher Rosemount Syst Inc | プロセス制御システムに関連付けられている補助レシピとバッチレシピを実行する方法および機器 |
| JP2020135550A (ja) * | 2019-02-21 | 2020-08-31 | 株式会社東芝 | プラント監視システムおよびプラント監視方法 |
| JP7037514B2 (ja) | 2019-02-21 | 2022-03-16 | 株式会社東芝 | プラント監視システムおよびプラント監視方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6078320A (en) | System for configuring a process control environment | |
| EP2084593B1 (en) | Data quality and status behavior for human machine interface graphics in industrial control and automation systems | |
| US7590680B2 (en) | Extensible robotic framework and robot modeling | |
| US7822495B2 (en) | Custom function blocks for use with process control systems | |
| US8631160B2 (en) | Development of parallel/distributed applications | |
| US6868538B1 (en) | Object-oriented programmable controller | |
| US6571273B1 (en) | Process control system | |
| JP2009009560A (ja) | 図形要素を用いてプロセスコントロール環境を構成するためのシステム | |
| JP2006504156A (ja) | リアルタイム・システム制御のためのコンポーネント・モデル | |
| JP5271994B2 (ja) | リアルタイム・ランタイムシステムおよびそのようなランタイムシステムのための機能モジュール | |
| JP6984565B2 (ja) | 情報処理装置およびプログラム | |
| JP7063009B2 (ja) | 表示装置、画面生成方法、および画面生成プログラム | |
| JP6954191B2 (ja) | 制御システム、開発支援装置、および開発支援プログラム | |
| JP2005353092A (ja) | プロセス制御システム | |
| US20220397875A1 (en) | Runtime Environment and Method for Creating an Event-Driven Execution Model of an Industrial Application | |
| EP4193225B1 (en) | Method and system for providing engineering of an industrial device in a cloud computing environment | |
| JP2004280299A (ja) | コントローラ、開発装置及びシステム | |
| WO2021044654A1 (ja) | 情報処理システム、プログラマブル表示器および情報処理装置 | |
| CN107561950B (zh) | 楼宇中控制器的编程方法及提供控制器编程工具的服务器 | |
| Louvel et al. | Coordination Scheme Editor for building management systems | |
| JP2006127069A (ja) | プラント監視制御システム | |
| JP2000029503A (ja) | プロセス制御システム | |
| JP2000029851A (ja) | プロセス制御システム | |
| Sarstedt et al. | Targeting System Evolution by Explicit Modeling of Control Flows Using UML 2 Activity Charts. | |
| JP2024084362A (ja) | 開発支援装置、開発支援方法および開発支援プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080425 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080620 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080728 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080924 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20081030 |