JP2005292290A - 移動ステージ装置及びプロジェクタ装置 - Google Patents
移動ステージ装置及びプロジェクタ装置 Download PDFInfo
- Publication number
- JP2005292290A JP2005292290A JP2004104373A JP2004104373A JP2005292290A JP 2005292290 A JP2005292290 A JP 2005292290A JP 2004104373 A JP2004104373 A JP 2004104373A JP 2004104373 A JP2004104373 A JP 2004104373A JP 2005292290 A JP2005292290 A JP 2005292290A
- Authority
- JP
- Japan
- Prior art keywords
- stage
- lock
- rotation
- moving
- arm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 230000003287 optical effect Effects 0.000 claims description 20
- 239000012636 effector Substances 0.000 claims description 5
- 238000000034 method Methods 0.000 description 7
- 230000000694 effects Effects 0.000 description 6
- 238000012937 correction Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- 238000001816 cooling Methods 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 238000010438 heat treatment Methods 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 230000010287 polarization Effects 0.000 description 2
- 230000001678 irradiating effect Effects 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images














Landscapes
- Projection Apparatus (AREA)
- Manipulator (AREA)
- Transmission Devices (AREA)
Abstract
【課題】 簡易な構成で、所望の軸上における全ての座標位置に移動させたい物体を移動することができる移動ステージ、及び、これを備えて高解像度の画像を投影可能なプロジェクタ装置を提供すること。
【解決手段】 移動ステージ装置106は、下ステージ105と、下ステージ105に対向して配された上ステージ103と、下ステージ105と上ステージ103とをリンクする3個のストロークユニット131、132、133と、下ステージ105に対する上ステージ103の位置及び姿勢を6自由度で制御する制御部(制御手段)135とを備え、各ストロークユニットは、下ステージ105と上ステージ103とをリンクするとともに自らの長さを変化できるアクチュエータアーム136と、下ステージ105と上ステージ103との相対的な動きに応じて長さを変化して下ステージ105と上ステージ103との間隔を固定できるロックアーム137とを備えている。
【選択図】 図3
【解決手段】 移動ステージ装置106は、下ステージ105と、下ステージ105に対向して配された上ステージ103と、下ステージ105と上ステージ103とをリンクする3個のストロークユニット131、132、133と、下ステージ105に対する上ステージ103の位置及び姿勢を6自由度で制御する制御部(制御手段)135とを備え、各ストロークユニットは、下ステージ105と上ステージ103とをリンクするとともに自らの長さを変化できるアクチュエータアーム136と、下ステージ105と上ステージ103との相対的な動きに応じて長さを変化して下ステージ105と上ステージ103との間隔を固定できるロックアーム137とを備えている。
【選択図】 図3
Description
本発明は、パラレルメカニズムを用いて6軸の長さ調整を行うことによって、6軸(X,Y,Z、θx、θy、θz)の所望の位置にステージ移動を可能とする移動ステージ装置及び、この移動ステージ装置を用いたプロジェクタ装置に関する。
プロジェクタに代表される投影装置は、バルブランプの光源光を空間変調素子に投射し、空間変調素子で調整された光を拡大投影しスクリーンに投影するものである。
近年は空間変調素子の解像度やバルブランプの発光量が飛躍的に向上したことで、明るく高解像な映像を投影することが可能となってきた。
しかしながら、光源となるバルブランプの発光量は無限ではなく、空間変調素子に投射する光量が制限される為、複数の投影装置を複合して投影する必要性があった。又、空間変調素子の解像度も製作上、制限が加わるために、スクリーン上に高解像度の画像を投影するためには、複数の投影装置を複合して投影する必要性があった。
近年は空間変調素子の解像度やバルブランプの発光量が飛躍的に向上したことで、明るく高解像な映像を投影することが可能となってきた。
しかしながら、光源となるバルブランプの発光量は無限ではなく、空間変調素子に投射する光量が制限される為、複数の投影装置を複合して投影する必要性があった。又、空間変調素子の解像度も製作上、制限が加わるために、スクリーン上に高解像度の画像を投影するためには、複数の投影装置を複合して投影する必要性があった。
このように、複数の投影装置を使ってスクリーンに投影する場合には、夫々の投影装置の投影位置を狙いの位置に投影する必要があり、複数の投影装置の位置関係を確認しズレ分を補正する必要がある。
このようなズレを補正するものとして、投影装置を移動可能な6軸移動ステージに乗せ、カメラでスクリーン上での投影装置の位置関係をとり込んで解析することで、ステージにズレ分の補正値を指示し、投影装置の位置を所望の位置関係にすることができるものが提案されている(例えば、特許文献1参照。)。
このようなズレを補正するものとして、投影装置を移動可能な6軸移動ステージに乗せ、カメラでスクリーン上での投影装置の位置関係をとり込んで解析することで、ステージにズレ分の補正値を指示し、投影装置の位置を所望の位置関係にすることができるものが提案されている(例えば、特許文献1参照。)。
また、物体の位置を把握して調整する方法としては、物体の干渉縞画像をとり込み解析することで物体の姿勢位置を把握し6軸移動ステージのそれぞれに移動量の指示を与えることにより、移動ステージ、しいては物体の位置調整する方法が提案されている(例えば、特許文献2参照。)。
さらに、6軸に対応した移動ステージを有さずに物体移動させる方法としては、伸び縮み可能な6本のアクチュエータとアクチュエータの両端に設けた関節により、6軸(X,Y,Z、θx、θy、θz)の移動を可能にする方法や(例えば、特許文献3参照。)、伸び縮み可能な3本のアクチュエータとアクチュエータの両端に設けた関節により、3軸(θx、θy、Z)の移動を可能にする方法が提案されている(例えば、特許文献4参照。)。
特開平8−168039号公報
特開平8−86631号公報
特開平9−105706号公報
特開平8−11080号公報
さらに、6軸に対応した移動ステージを有さずに物体移動させる方法としては、伸び縮み可能な6本のアクチュエータとアクチュエータの両端に設けた関節により、6軸(X,Y,Z、θx、θy、θz)の移動を可能にする方法や(例えば、特許文献3参照。)、伸び縮み可能な3本のアクチュエータとアクチュエータの両端に設けた関節により、3軸(θx、θy、Z)の移動を可能にする方法が提案されている(例えば、特許文献4参照。)。
しかしながら、上記特許文献1、2に記載の技術は、画像をとり込んで解析した後、各移動ステージに移動量を指示するもので、移動ステージは各軸に独立対応して構成されている。そのため、移動ステージを6軸移動させる場合、6つの移動ステージで構成する必要性がある。このため、1軸移動に対して1移動ステージが必要となることから、6つの移動ステージが必要となり、装置が大型化してしまうこととなる。
また、上記特許文献3に記載の技術では、6軸全てにアクチュエータが必要となるため、それぞれのアクチュエータを構成する要素が多くなり、構成が複雑化することとなる。
さらに、特許文献4に記載の技術では、移動する軸が3つに決められてしまうので、6軸等これと異なる自由度を要する移動に対応できるものではない。
本発明は上記事情に鑑みて成されたものであり、簡易な構成で、所望の軸上における全ての座標位置に移動させたい物体を移動することができる移動ステージ、及び、これを備えてスクリーン上に高解像度の画像を投影可能なプロジェクタ装置を提供することを目的とする。
さらに、特許文献4に記載の技術では、移動する軸が3つに決められてしまうので、6軸等これと異なる自由度を要する移動に対応できるものではない。
本発明は上記事情に鑑みて成されたものであり、簡易な構成で、所望の軸上における全ての座標位置に移動させたい物体を移動することができる移動ステージ、及び、これを備えてスクリーン上に高解像度の画像を投影可能なプロジェクタ装置を提供することを目的とする。
本発明は、上記課題を解決するため、以下の手段を採用する。
本発明に係る移動ステージ装置は、パラレルメカニズムを用いる移動ステージ装置であって、ベース部とされるベースステージと、該ベースステージに対向して配されたエンドエフェクタ部とされるエンドステージと、互いに離間して配されて前記ベースステージと前記エンドステージとをリンクする3個のストロークユニットと、前記3個のストロークユニットを駆動制御して前記ベースステージに対する前記エンドステージの位置及び姿勢を6自由度で制御する制御手段とを備え、前記ストロークユニットが、前記ベースステージと前記エンドステージとをリンクするとともに自らの長さを変化できるアクチュエータアームと、前記ベースステージと前記エンドステージとの相対的な動きに応じて長さを変化して前記ベースステージと前記エンドステージとの間隔を固定できるロックアームと、前記ベースステージ又は前記エンドステージと前記アクチュエータアーム及び前記ロックアームのリンク連結位置における所定の一軸回りの回動をロックできる回動ロック手段とを備えていることを特徴とする。
本発明に係る移動ステージ装置は、パラレルメカニズムを用いる移動ステージ装置であって、ベース部とされるベースステージと、該ベースステージに対向して配されたエンドエフェクタ部とされるエンドステージと、互いに離間して配されて前記ベースステージと前記エンドステージとをリンクする3個のストロークユニットと、前記3個のストロークユニットを駆動制御して前記ベースステージに対する前記エンドステージの位置及び姿勢を6自由度で制御する制御手段とを備え、前記ストロークユニットが、前記ベースステージと前記エンドステージとをリンクするとともに自らの長さを変化できるアクチュエータアームと、前記ベースステージと前記エンドステージとの相対的な動きに応じて長さを変化して前記ベースステージと前記エンドステージとの間隔を固定できるロックアームと、前記ベースステージ又は前記エンドステージと前記アクチュエータアーム及び前記ロックアームのリンク連結位置における所定の一軸回りの回動をロックできる回動ロック手段とを備えていることを特徴とする。
また、本発明に係る移動ステージ装置は、前記移動ステージ装置であって、前記制御手段が、制御対象を前記アクチュエータアームと、前記ロックアームと、前記回動ロック手段とされ、前記ベースステージに対する前記エンドステージの位置及び姿勢を一自由度ずつ制御する際に、前記ロックアームと前記回動ロック手段のロック動作を解除した後、前記アクチュエータアームの長さを変化して前記ロックアームの長さを所定の長さに変化させ、前記ロックアームと前記回動ロック手段とをロックする一連の動作を、前記ストロークユニットそれぞれに対し順次行い、前記ロックアーム全ての長さを固定した後に前記回動ロック手段のロック動作を解除して、前記アクチュエータアームを所定の長さに変化させることを特徴とする。
この移動ステージ装置は、3つのストロークユニットにおいてアクチュエータアームとロックアームとの長さをそれぞれ変化させることにより、ベースステージに対してエンドステージを6軸方向に移動制御することができる。
また、本発明に係る移動ステージ装置は、パラレルメカニズムを用いる移動ステージ装置であって、ベース部とされるベースステージと、該ベースステージに対向して配されたエンドエフェクタ部とされるエンドステージと、互いに離間して配されて前記ベースステージと前記エンドステージとをリンクする複数のストロークユニットと、前記複数のストロークユニットを駆動制御して前記ベースステージに対する前記エンドステージの位置及び姿勢を制御する制御手段とを備え、前記ストロークユニットが、前記ベースステージと前記エンドステージとをリンクするとともに自らの長さを変化できるアクチュエータアームと、前記ベースステージと前記エンドステージとの相対的な動きに応じて長さを変化して前記ベースステージと前記エンドステージとの間隔を固定できるロックアームと、前記ベースステージ又は前記エンドステージと前記アクチュエータアーム及び前記ロックアームのリンク連結位置における所定の一軸回りの回動をロックできる回動ロック手段とを備え、前記制御手段が、前記アクチュエータアームの本数をA、前記ロックアームの本数をB、前記回動ロック手段の数をCとした際、N=A+(B+C)/2で表される自由度を制御可能とされていることを特徴とする。
この移動ステージ装置は、複数のストロークユニットにおいてA個のアクチュエータアームとB個のロックアームとの長さをそれぞれ変化させることにより、ベースステージに対してエンドステージのN軸移動を制御することができる。
また、本発明に係る移動ステージ装置は、前記移動ステージ装置であって、前記A、前記B、及び、前記Cが3とされていることを特徴とする。
この移動ステージ装置は、3つずつのアクチュエータアームとロックアームとの長さをそれぞれ変化させることにより、ベースステージに対してエンドステージを6軸方向に移動制御することができる。
この移動ステージ装置は、3つずつのアクチュエータアームとロックアームとの長さをそれぞれ変化させることにより、ベースステージに対してエンドステージを6軸方向に移動制御することができる。
また、本発明に係る移動ステージ装置は、前記移動ステージ装置であって、前記一つのストロークユニットを構成する前記アクチュエータアームの一端及び前記ロックアームの一端、又は、前記アクチュエータアームの他端及び前記ロックアームの他端の何れか一方が互いに隣接して配され、他方が互いに離間して配されていることを特徴とする。
この移動ステージ装置は、各ストロークユニットをアクチュエータアームとロックアームとを二辺とする三角形に形成することができ、エンドステージの位置制御をより好適に行うことができる。
この移動ステージ装置は、各ストロークユニットをアクチュエータアームとロックアームとを二辺とする三角形に形成することができ、エンドステージの位置制御をより好適に行うことができる。
また、本発明に係る移動ステージ装置は、前記移動ステージ装置であって、前記回動ロック手段が、互いに離間して配された前記アクチュエータアームの端部に連結された第1の回動軸と、前記ロックアームの端部に連結された第2の回動軸と、前記アクチュエータアームの前記第1の回動軸回りの回動をロックする第1の接続部と、前記ロックアームの前記第2の回動軸回りの回動をロックする第2の接続部とを備え、前記第1の回動軸と前記第2の回動軸とが平行に配されていることを特徴とする。
また、本発明に係る移動ステージ装置は、前記移動ステージ装置であって、前記回動ロック手段が、互いに隣接して配された前記アクチュエータアームの端部と前記ロックアームの端部とにそれぞれ連結された回動軸と、前記アクチュエータアームの前記回動軸回りの回動と前記ロックアームの前記回動軸回りの回動とを共にロックする接続部とを備えていることを特徴とする。
この移動ステージ装置は、アクチュエータアームの端部とロックアームの端部とをそれぞれ同一方向の軸回りに回動させることができる。
また、本発明に係る移動ステージ装置は、前記移動ステージ装置であって、前記回動ロック手段が、互いに隣接して配された前記アクチュエータアームの端部と前記ロックアームの端部とにそれぞれ連結された回動軸と、前記アクチュエータアームの前記回動軸回りの回動と前記ロックアームの前記回動軸回りの回動とを共にロックする接続部とを備えていることを特徴とする。
この移動ステージ装置は、アクチュエータアームの端部とロックアームの端部とをそれぞれ同一方向の軸回りに回動させることができる。
また、本発明に係る移動ステージ装置は、前記移動ステージ装置であって、前記各ストロークユニットに係る前記第1の回動軸及び前記第2の回動軸の軸方向が、互いに交差する角度で配されていることを特徴とする。
この移動ステージ装置は、第1の回動軸及び第2の回動軸回りの回動を各ストロークユニットで異なる方向にすることができ、エンドステージの制御自由度を増やすことができる。
この移動ステージ装置は、第1の回動軸及び第2の回動軸回りの回動を各ストロークユニットで異なる方向にすることができ、エンドステージの制御自由度を増やすことができる。
また、本発明に係る移動ステージ装置は、前記移動ステージ装置であって、前記各ストロークユニットに係る前記回動軸の軸方向が、互いに交差する角度で配されていることを特徴とする。
この移動ステージ装置は、回動軸回りの回動を各ストロークユニットで異なる方向にすることができ、エンドステージの制御をより好適に行うことができる。
この移動ステージ装置は、回動軸回りの回動を各ストロークユニットで異なる方向にすることができ、エンドステージの制御をより好適に行うことができる。
また、本発明に係る移動ステージ装置は、前記移動ステージ装置であって、前記角度が60度とされていることを特徴とする。
この移動ステージによれば、6自由度制御を好適に行うことができる。
この移動ステージによれば、6自由度制御を好適に行うことができる。
また、本発明に係る移動ステージ装置は、前記移動ステージ装置であって、前記ベースステージと前記エンドステージとの温度を略同一温度に調整する温度調整手段を備えていることを特徴とする。
この移動ステージ装置は、ベースステージとエンドステージとの相対温度差によって制御目標位置と移動量とから算出される実際の位置が変動してしまうのを抑えて高精度の位置制御を行うことができる。
この移動ステージ装置は、ベースステージとエンドステージとの相対温度差によって制御目標位置と移動量とから算出される実際の位置が変動してしまうのを抑えて高精度の位置制御を行うことができる。
また、本発明に係る移動ステージ装置は、前記移動ステージ装置であって、前記各ストロークユニットと前記エンドステージとのリンク連結位置を内接する円の直径を第1の直径とし、前記各ストロークユニットと前記ベースステージとのリンク連結位置を内接する円の直径を第2の直径とするとき、前記第1の直径が、前記第2の直径よりも小さいことを特徴とする。
この移動ステージ装置は、より好適にエンドステージの位置制御を行うことができる。
この移動ステージ装置は、より好適にエンドステージの位置制御を行うことができる。
また、本発明に係る移動ステージ装置は、前記移動ステージ装置であって、前記リンク連結位置を前記円の半径方向にスライドさせるステージ移動精度切換手段を備え、前記制御手段が、前記エンドステージの面方向に高い精度を必要とする移動の際に、前記第1の直径と前記第2の直径との差分が大きくなるように前記ステージ移動精度切換手段を制御して前記リンク連結位置を調整することを特徴とする。
この移動ステージ装置は、アクチュエータアーム、ロックアームの長さの単位変化量に対するステージ面に直交する方向のステージ移動量を小さくすることができ、この方向の移動精度を高めることができる。
この移動ステージ装置は、アクチュエータアーム、ロックアームの長さの単位変化量に対するステージ面に直交する方向のステージ移動量を小さくすることができ、この方向の移動精度を高めることができる。
また、本発明に係る移動ステージ装置は、前記移動ステージ装置であって、前記リンク連結位置を前記円の半径方向にスライドさせるステージ移動精度切換手段を備え、前記制御手段が、前記エンドステージ面と直交する方向に高い精度を必要とする移動の際に、前記第1の直径と前記第2の直径との差分が小さくなるように前記ステージ移動精度切換手段を制御して前記リンク連結位置を調整することを特徴とする。
この移動ステージ装置は、アクチュエータアーム、ロックアームの長さの単位変化量に対するステージ面に接する方向のステージ移動量を小さくすることができ、この方向の移動精度を高めるることができる。
この移動ステージ装置は、アクチュエータアーム、ロックアームの長さの単位変化量に対するステージ面に接する方向のステージ移動量を小さくすることができ、この方向の移動精度を高めるることができる。
本発明に係るプロジェクタ装置は、本発明に係る移動ステージ装置と、前記ベースステージ面上に載置され、光学系を介して投影画像を出射する第1の画像手段と、前記エンドステージ面上に載置され、光学系を介して投影画像を出射する第2の画像手段と、前記第1の画像手段が出射した投影画像と、前記第2の画像手段が出射した投影画像とを合成した投影画像をスクリーン面に投影する投影光学手段とを備えていることを特徴とする。
このプロジェクタ装置は、第1の画像手段と第2の画像手段との位置を高精度に制御することができる。
このプロジェクタ装置は、第1の画像手段と第2の画像手段との位置を高精度に制御することができる。
本発明によれば、簡易なロック機構を備えることによって、移動制御に必要な自由度よりも少ないアクチュエータの駆動で、ベースステージに対してエンドステージを6軸制御することができる。したがって、より高画素の映像に対しても高精度の照射を行うことができる。
本発明に係る第1の実施形態について、図1から図16を参照して説明する。
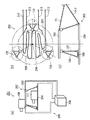
本実施形態に係るプロジェクタ装置101は、図1に示すように、スクリーン面102に投射光を照射して投影するための装置であって、図2に示すように、上ステージ(エンドステージ)103と下ステージ(ベースステージ)105とを有してパラレルメカニズムを用いてこれらの位置制御を行う移動ステージ装置106と、上ステージ103面上に載置され、第1の光学系107を介して投影画像を出射する第1のプロジェクタ(第1の画像手段)108と、下ステージ105面上に載置され、第2の光学系110を介して投影画像を出射する第2のプロジェクタ(第2の画像手段)111と、入力した映像を第1のプロジェクタ108及び第2のプロジェクタ111に供給する画像再生装置112と、画像再生装置112と同期して接続される画像処理装置113と、下ステージ105に載置され、第1のプロジェクタ108が出射した投影画像と第2のプロジェクタ111が出射した投影画像とを光学的に合成した合成投影画像115をスクリーン102に投影する投影光学手段116と、第1のプロジェクタ108が出射した投影画像と第2のプロジェクタ111が出射した投影画像とを所望の精度で合成するために第2のプロジェクタ111に対する第1のプロジェクタ108の位置を把握するためのモニタ光学手段117とを備えている。
本実施形態に係るプロジェクタ装置101は、図1に示すように、スクリーン面102に投射光を照射して投影するための装置であって、図2に示すように、上ステージ(エンドステージ)103と下ステージ(ベースステージ)105とを有してパラレルメカニズムを用いてこれらの位置制御を行う移動ステージ装置106と、上ステージ103面上に載置され、第1の光学系107を介して投影画像を出射する第1のプロジェクタ(第1の画像手段)108と、下ステージ105面上に載置され、第2の光学系110を介して投影画像を出射する第2のプロジェクタ(第2の画像手段)111と、入力した映像を第1のプロジェクタ108及び第2のプロジェクタ111に供給する画像再生装置112と、画像再生装置112と同期して接続される画像処理装置113と、下ステージ105に載置され、第1のプロジェクタ108が出射した投影画像と第2のプロジェクタ111が出射した投影画像とを光学的に合成した合成投影画像115をスクリーン102に投影する投影光学手段116と、第1のプロジェクタ108が出射した投影画像と第2のプロジェクタ111が出射した投影画像とを所望の精度で合成するために第2のプロジェクタ111に対する第1のプロジェクタ108の位置を把握するためのモニタ光学手段117とを備えている。
第1の光学系107は、第1のプロジェクタ108から射出された光を波長施光作用によって全てS偏光とする第1の偏光板118と、第1の偏光板118を通過した光を略平行光とする第1のリレー光学系120と、略平行光の光路を後述する偏光ビームスプリッタ125に向かって折り曲げる第1の反射鏡121とを備えている。
第2の光学系110は、第2のプロジェクタ111から射出された光を波長施光作用によって全てP偏光とする第2の偏光板122と、第2の偏光板122を通過した光を略平行光とする第2のリレー光学系123とを備えている。
第2の光学系110は、第2のプロジェクタ111から射出された光を波長施光作用によって全てP偏光とする第2の偏光板122と、第2の偏光板122を通過した光を略平行光とする第2のリレー光学系123とを備えている。
投影光学手段116は、第1のプロジェクタ108から射出された光と第2のプロジェクタ111から射出された光とを合成する偏光ビームスプリッタ125を備えている。
モニタ光学手段117は、偏光ビームスプリッタ125から漏れた光を反射する第2の反射鏡126と、第2の反射鏡126からの光が導光されて所望の画像サイズに調光するモニタ投影光学系127と、モニタ投影光学系127を通過した光が投影されるモニタスクリーン128と、モニタスクリーン128に投影された映像をとらえるモニタ結像手段130とを備えている。
モニタ光学手段117は、偏光ビームスプリッタ125から漏れた光を反射する第2の反射鏡126と、第2の反射鏡126からの光が導光されて所望の画像サイズに調光するモニタ投影光学系127と、モニタ投影光学系127を通過した光が投影されるモニタスクリーン128と、モニタスクリーン128に投影された映像をとらえるモニタ結像手段130とを備えている。
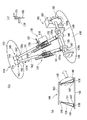
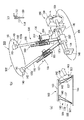
移動ステージ装置106は、図2及び図3に示すように、ベース部とされる下ステージ105と下ステージ105に対向して配されたエンドエフェクタ部とされる上ステージ103との他に、互いに離間して配されて下ステージ105と上ステージ103とをリンクする3個のストロークユニット131、132、133と、3個のストロークユニット131、132、133を駆動制御して下ステージ105に対する上ステージ103の位置及び姿勢を6自由度で制御する制御部(制御手段)135とを備え、各ストロークユニット131、132、133は、下ステージ105と上ステージ103とをリンクするとともに自らの長さを変化できるアクチュエータアーム136と、下ステージ105と上ステージ103との相対的な動きに応じて長さを変化して下ステージ105と上ステージ103との間隔を固定できるロックアーム137と、下ステージ105上に配されてアクチュエータアーム136の一端136aとロックアーム137の一端137aとを連結してリンク連結位置の一軸回りの回動を可能とする回動軸138を有して回動軸138の回転をロックできる回動ロック手段140とを備えている。
各ストロークユニット131、132、133にはそれぞれ、アクチュエータアーム136、ロックアーム137、回動軸138とが正三角形を形成するように、アクチュエータアーム136の一端136a及びロックアーム137の一端137aが互いに離間して配され、アクチュエータアーム136の他端136b及びロックアーム137の他端137bが互いに隣接して配されている。
各ストロークユニット131、132、133は、下ステージ105の中心に対して互いに120度ずつの角度で離間した位置に、回動軸138の軸方向が60度の角度で配されており、下ステージ105に対する各ストロークユニット131、132、133の姿勢角度が70度とされている。
各ストロークユニット131、132、133は、下ステージ105の中心に対して互いに120度ずつの角度で離間した位置に、回動軸138の軸方向が60度の角度で配されており、下ステージ105に対する各ストロークユニット131、132、133の姿勢角度が70度とされている。
図4及び図5に示すように、上ステージ103に対してアクチュエータアーム136の他端136bと、ロックアーム137の他端137bとは、ジョイント凹141とジョイント凸142とからなるボールジョイント143にて回動自在に嵌合されている。
アクチュエータアーム136の一端136aは、回転ピン145を中心に回動軸138の軸方向に回動可能に第1の2軸ジョイント(第1の接続部)146に結合されており、第1の2軸ジョイント146は回動軸138に固定ビス138aで固定されている。
ロックアーム137の一端137aは、第1の2軸ジョイント146と同様の構成を有する第2の2軸ジョイント(第2の接続部)147に、アクチュエータアーム136の一端136aと同様に支持されている。
アクチュエータアーム136の一端136aは、回転ピン145を中心に回動軸138の軸方向に回動可能に第1の2軸ジョイント(第1の接続部)146に結合されており、第1の2軸ジョイント146は回動軸138に固定ビス138aで固定されている。
ロックアーム137の一端137aは、第1の2軸ジョイント146と同様の構成を有する第2の2軸ジョイント(第2の接続部)147に、アクチュエータアーム136の一端136aと同様に支持されている。
図5及び図6に示すように、回動ロック手段140は、下ステージ105上に固定されて回動軸138の一端138a側と他端138b側とを回動自在に支持する2個の軸受け148と、回動軸138の他端138b側に固定されて回動軸138とともに回動する回動軸ディスク150と、回動軸ディスク150を挟んで配され、制御部135の指示により出し入れすることによって、任意の位置に回動軸ディスク150、すなわち、回動軸138の回転をフリー又はロック状態にすることが可能な一対の回動軸ロックパッド151を有する回動軸ロック部152とを備えている。
アクチュエータアーム136は、一端136a側で第1の2軸ジョイント146に連結される第1の固定軸153と、他端136b側で第1の固定軸153の軸回りに回動可能な移動回動軸155と、第1の固定軸153に配され、制御部135からの指示で駆動するモータ156と、モータ156に取り付けられた第1のウォームギア157と、移動回動軸155に配されて第1のウォームギア157の回転が伝達される第2のウォームギア158と、移動回動軸155と第1の固定軸153とにまたがって配されたアクチュエータアーム制御手段160とを備えている。
アクチュエータアーム制御手段160は、移動回動軸155と第1の固定軸153とのストローク位置関係を測定して制御部135に測定データを伝達するようにされている。
アクチュエータアーム制御手段160は、移動回動軸155と第1の固定軸153とのストローク位置関係を測定して制御部135に測定データを伝達するようにされている。
ロックアーム137は、第2の2軸ジョイント147に連結される第2の固定軸161と、第2の固定軸161の軸方向に移動可能な移動軸162と、第2の固定軸161に配されて移動軸162の軸方向の移動を制御部135からの指示で制御するロックキャリパ163と、移動軸162と第2の固定軸161とにまたがって配され、第2の固定軸161に対する移動軸162のストローク位置関係を測定して測定データを制御部135に伝達するロックアーム制御手段165とを備えている。
ロックキャリパ163は、本体166と、本体の内部に配されて先端に微細な凹凸部167Aが形成されたロックアームシリンダ167が取り付けられており、制御部135の指示により出し入れが可能とされている。移動軸162の外周面には、ロックアームシリンダ167を出した状態でロックアームシリンダ167の凹凸部167Aと係合可能な微細溝168が配されており、凹凸部167Aと微細溝168とが係合されることによって移動軸162と第2の固定軸161とが固定される。
ロックキャリパ163は、本体166と、本体の内部に配されて先端に微細な凹凸部167Aが形成されたロックアームシリンダ167が取り付けられており、制御部135の指示により出し入れが可能とされている。移動軸162の外周面には、ロックアームシリンダ167を出した状態でロックアームシリンダ167の凹凸部167Aと係合可能な微細溝168が配されており、凹凸部167Aと微細溝168とが係合されることによって移動軸162と第2の固定軸161とが固定される。
制御部135は、制御対象をアクチュエータアーム136と、ロックアーム137と、回動ロック手段140とされ、下ステージ105に対する上ステージ103の位置及び姿勢を一自由度ずつ制御する際に、ロックアーム137と回動ロック手段140のロック動作を解除した後、アクチュエータアーム136の長さを変化してロックアーム137の長さを所定の長さに変化させ、ロックアーム137と回動ロック手段140とをロックする一連の動作を、ストロークユニット131、132、133のそれぞれに対し順次行い、ロックアーム137全ての長さを固定した後に回動ロック手段140のロック動作を解除して、アクチュエータアーム136を所定の長さに変化させるものとされている。
モニタスクリーン128には、画像再生装置112からの指示により第1のプロジェクタ108及び第2のプロジェクタ111に予め設定された表示タイミングで第1のプロジェクタ108及び第2のプロジェクタ111の位置を示すマークがモニタスクリーン128上の任意の位置に投影される。
図7に示すように、画像処理装置113は、これと同期してモニタ結像手段130に撮影指示を出して位置を示すマークを各撮影タイミングで撮影するとともに、制御部135が備える位置解析ソフトによって第1のプロジェクタ108及び第2のプロジェクタ111の位置関係を把握して所望の移動量を解析し、解析結果を各ストロークユニット131、132、133に伝達して上ステージ103を所望の位置に移動させる。
図7に示すように、画像処理装置113は、これと同期してモニタ結像手段130に撮影指示を出して位置を示すマークを各撮影タイミングで撮影するとともに、制御部135が備える位置解析ソフトによって第1のプロジェクタ108及び第2のプロジェクタ111の位置関係を把握して所望の移動量を解析し、解析結果を各ストロークユニット131、132、133に伝達して上ステージ103を所望の位置に移動させる。
なお、第1のプロジェクタ108及び第2のプロジェクタ111の位置を調整して高機能化する手段として高精細化を図る場合には、P/2画素ピッチ分ずらした位置に第1のプロジェクタ108を移動すれば良い。
また、第1のプロジェクタ108を第2のプロジェクタ111と同位置に移動すれば高輝度出力を得ることができ、第1のプロジェクタ108に左眼用、第2のプロジェクタ111に右目用の画像を入力することによって3D映像を得ることができる。
また、第1のプロジェクタ108を第2のプロジェクタ111と同位置に移動すれば高輝度出力を得ることができ、第1のプロジェクタ108に左眼用、第2のプロジェクタ111に右目用の画像を入力することによって3D映像を得ることができる。
次に、本実施形態に係るプロジェクタ装置101における移動ステージ装置106の作用・効果として、画像処理装置113の位置解析ソフトにより第1のプロジェクタ108と第2のプロジェクタ111との位置関係の補正量が、X軸方向に+20mm移動する必要があると判断した場合について、図8から図16までを用いて説明する。
第1のプロジェクタ108の補正量が制御I/Fを介して制御部135に伝達されると、制御部135ではパラレルメカニズムの算出により、アクチュエータアーム136とロックアーム137との長さが決定され、移動ステージ各部位の制御が開始される。ここで、全てのアクチュエータアーム136とロックアーム137の初期状態における長さを図8に示すように、590.881mmとする。
第1のプロジェクタ108の補正量が制御I/Fを介して制御部135に伝達されると、制御部135ではパラレルメカニズムの算出により、アクチュエータアーム136とロックアーム137との長さが決定され、移動ステージ各部位の制御が開始される。ここで、全てのアクチュエータアーム136とロックアーム137の初期状態における長さを図8に示すように、590.881mmとする。
図9及び図10に示すように、制御部135からの指示により、ストロークユニット131のロックアームシリンダ167と回動ロック手段140のロックを解除する。これによって、それぞれ移動制限方向に対して自由動状態となる。
次にアクチュエータアーム136のモータ156を、アクチュエータアーム136の全体の長さが短くなる方向に回転させて第1のウォームギア157を回転し、この回転力を第2のウォームギア158に伝達して、移動回動軸155を第1の固定軸153に対して回転させながら全体の長さを変更する。このとき、ロックアーム137の移動軸162は第2の固定軸161に対して同一方向に移動する。
次にアクチュエータアーム136のモータ156を、アクチュエータアーム136の全体の長さが短くなる方向に回転させて第1のウォームギア157を回転し、この回転力を第2のウォームギア158に伝達して、移動回動軸155を第1の固定軸153に対して回転させながら全体の長さを変更する。このとき、ロックアーム137の移動軸162は第2の固定軸161に対して同一方向に移動する。
この間、ストロークユニット132、133はアクチュエータアーム136及びロックアーム137とも長さが変化しないため、軸170の位置が固定された状態で、この軸170を回転中心として上ステージ103が回転して下ステージ105に対する姿勢角度が変化する。この際、ボールジョイント143内のジョイント凸142に対し、ジョイント凹141が動くことで上ステージの姿勢が変化する。
ロックアーム制御手段165から逐次制御部135にロックアーム137の長さ情報を伝達させ、図11に示すように、ロックアーム137の長さが587.388mmになったところで、制御部135よりアクチュエータアーム136のモータ156停止、及び、ロックアームシリンダ167のロック、回動ロック手段140のロックの指示がなされ、一旦全ての可動部が固定される。
ロックアーム制御手段165から逐次制御部135にロックアーム137の長さ情報を伝達させ、図11に示すように、ロックアーム137の長さが587.388mmになったところで、制御部135よりアクチュエータアーム136のモータ156停止、及び、ロックアームシリンダ167のロック、回動ロック手段140のロックの指示がなされ、一旦全ての可動部が固定される。
続いて、ストロークユニット132のロックアームシリンダ167と回動ロック手段140のロックを解除する。そして、アクチュエータアーム136のモータ156を回転して移動回動軸155を回転させながら長さを変更する。このとき、ストロークユニット131、133はアクチュエータアーム136及びロックアーム137とも長さが変化しないため、ストロークユニット131における長さ制御をした時と同様に、上ステージ103が軸171を回転中心として回動することで、下ステージ105に対する姿勢角度が変化する。
そして、ロックアーム制御手段165から逐次制御部135にロックアーム137の長さ情報を伝達し、図12に示すように、ロックアーム137の長さが592.872mmになったところで、制御部135よりアクチュエータアーム136のモータ156停止、及び、ロックアームシリンダ167のロック、回動ロック手段140のロックの指示がなされ、全ての可動部が固定される。
ストロークユニット133に対しても同様の操作を行い、図13に示すように、ストロークユニット133のロックアーム137の長さが592.872mmになったところで、制御部135よりアクチュエータアーム136のモータ156停止、及び、ロックアームシリンダ167のロック、回動ロック手段140をロックする。
そして、ロックアーム制御手段165から逐次制御部135にロックアーム137の長さ情報を伝達し、図12に示すように、ロックアーム137の長さが592.872mmになったところで、制御部135よりアクチュエータアーム136のモータ156停止、及び、ロックアームシリンダ167のロック、回動ロック手段140のロックの指示がなされ、全ての可動部が固定される。
ストロークユニット133に対しても同様の操作を行い、図13に示すように、ストロークユニット133のロックアーム137の長さが592.872mmになったところで、制御部135よりアクチュエータアーム136のモータ156停止、及び、ロックアームシリンダ167のロック、回動ロック手段140をロックする。
次に、図9及び図10に示すように、制御部135からの指示によって、ストロークユニット132、133の回動ロック手段140のロックを解除し回動軸138を回転自由状態にする。その後、ストロークユニット131のアクチュエータアーム136のモータ156をアクチュエータアーム136の全体の長さが長くなる方向に回転させ、移動回動軸155を回転させながら移動して図14に示すように、アクチュエータアーム136の長さを変更する。このとき、ロックアームシリンダ167はロックされているので、ロックアーム137の長さは変化しない。
したがって、アクチュエータアーム136の長さが長くなるにつれて、アクチュエータアーム136の一端136aが、第1の2軸ジョイント146に対して回転ピン145回りにロックアーム137方向に回転する。また、ロックアーム137の一端137aが、第2の2軸ジョイント147に対して回転ピン145回りに同一方向に回転する。
したがって、アクチュエータアーム136の長さが長くなるにつれて、アクチュエータアーム136の一端136aが、第1の2軸ジョイント146に対して回転ピン145回りにロックアーム137方向に回転する。また、ロックアーム137の一端137aが、第2の2軸ジョイント147に対して回転ピン145回りに同一方向に回転する。
このとき、ストロークユニット132、133はアクチュエータアーム136及びロックアーム137とも長さが変化しないため、それぞれ回動軸138が回転して下ステージ105に対する姿勢角度が変化する。
アクチュエータアーム制御手段160から逐次制御部135にアクチュエータアーム136の長さ情報を伝達し、図14に示すように、アクチュエータアーム136の長さが595.025mmになったところで、制御部135よりアクチュエータアーム136のモータ156停止の指示がなされ全ての可動部が固定される。
この間、アクチュエータアーム136の他端136a及びロックアーム137の他端137bとがそれぞれボールジョイント143に接続されているので、上ステージ103がストロークユニット131の長さ変化に応じて移動する。
同様の操作をストロークユニット132に対して行い、図15に示すように、アクチュエータアーム136の長さを589.052mmとする。そして、ストロークユニット133のアクチュエータアーム136の長さを589.052mmとすると、図16に示すように、上ステージ103が最終的にX軸方向に+20mm移動する。
こうして、第1のプロジェクタ108と第2のプロジェクタ111とを所望の位置関係とすることができる。
アクチュエータアーム制御手段160から逐次制御部135にアクチュエータアーム136の長さ情報を伝達し、図14に示すように、アクチュエータアーム136の長さが595.025mmになったところで、制御部135よりアクチュエータアーム136のモータ156停止の指示がなされ全ての可動部が固定される。
この間、アクチュエータアーム136の他端136a及びロックアーム137の他端137bとがそれぞれボールジョイント143に接続されているので、上ステージ103がストロークユニット131の長さ変化に応じて移動する。
同様の操作をストロークユニット132に対して行い、図15に示すように、アクチュエータアーム136の長さを589.052mmとする。そして、ストロークユニット133のアクチュエータアーム136の長さを589.052mmとすると、図16に示すように、上ステージ103が最終的にX軸方向に+20mm移動する。
こうして、第1のプロジェクタ108と第2のプロジェクタ111とを所望の位置関係とすることができる。
この移動ステージ装置106及びプロジェクタ装置101によれば、3つのストロークユニット131、132、133においてアクチュエータアーム136とロックアーム137との長さをそれぞれ変化させることによって、下ステージ105に対して上ステージ103を6軸方向に移動することができる。
したがって、6軸すべてにアクチュエータを設けなくても簡易な構成で下ステージに対して上ステージを6軸制御することができ、第1のプロジェクタ108と第2のプロジェクタ110との位置を高精度に制御して、より高画素の映像に対しても高精度の照射を行うことができる。
したがって、6軸すべてにアクチュエータを設けなくても簡易な構成で下ステージに対して上ステージを6軸制御することができ、第1のプロジェクタ108と第2のプロジェクタ110との位置を高精度に制御して、より高画素の映像に対しても高精度の照射を行うことができる。
次に、第2の実施形態について図17を参照しながら説明する。
なお、上述した第1の実施形態と同様の構成要素には同一符号を付すとともに説明を省略する。
第2の実施形態と第1の実施形態との異なる点は、本実施形態に係るプロジェクタ装置201が備える移動ステージ装置202が、上ステージ203と下ステージ204の温度を略同一温度に調整する温度調整手段205を備えている点である。
なお、上述した第1の実施形態と同様の構成要素には同一符号を付すとともに説明を省略する。
第2の実施形態と第1の実施形態との異なる点は、本実施形態に係るプロジェクタ装置201が備える移動ステージ装置202が、上ステージ203と下ステージ204の温度を略同一温度に調整する温度調整手段205を備えている点である。
温度調整手段205は、上ステージ203内の全面にわたって配設された第1の温調配管206と、下ステージ204内の全面にわたって配設された第2の温調配管207と、第1の温調配管206及び第2の温調配管207に温度調整用の水等の液体媒体を流通させる温度調整機208と、上ステージ203及び下ステージの中央部に配されて温度を測定する温度センサ210とを備えている。
第1の温調配管206及び第2の温調配管207の一方には温度調整機208とそれぞれ連通される第1の往路温調配管211及び第2の往路温調配管212がそれぞれ接続され、他方には温度調整機208とそれぞれ連通された第1の復路温調配管213及び第2の復路温調配管215が接続されている。温度調整機208は、媒体を加熱、冷却させる不図示の加熱・冷却部と、排出する媒体量を調整して、上ステージ203、下ステージ204の単独制御と、温度差が小さくなったときの熱交換の微調整とを行う不図示の制御弁と、温度センサ215にて測定した温度と設定温度との温度差をなくすための不図示の温度制御部とを備えている。
第1の温調配管206及び第2の温調配管207の一方には温度調整機208とそれぞれ連通される第1の往路温調配管211及び第2の往路温調配管212がそれぞれ接続され、他方には温度調整機208とそれぞれ連通された第1の復路温調配管213及び第2の復路温調配管215が接続されている。温度調整機208は、媒体を加熱、冷却させる不図示の加熱・冷却部と、排出する媒体量を調整して、上ステージ203、下ステージ204の単独制御と、温度差が小さくなったときの熱交換の微調整とを行う不図示の制御弁と、温度センサ215にて測定した温度と設定温度との温度差をなくすための不図示の温度制御部とを備えている。
次に、本実施形態に係る移動ステージ装置202及びプロジェクタ装置201において、温度調整に係る作用、及び効果について説明する。
まず、上ステージ203及び下ステージ204上の設定温度をそれぞれ温度調整機208にセットして、各ステージに配設された温度センサ210により実際の温度を把握する。
温度センサ210で感知した温度が低い場合には、温度制御部の指示により温度調整機208が有する加熱機能によって媒体を設定温度よりも高温に加熱し、或いは、温度センサ210で感知した温度が高い場合には、温度制御部の指示により温度調整機208が有する冷却機能によって媒体を設定温度よりも低温に冷却する。そして、温度調整された媒体を温度調整機208より送り出し、第1の往路温調配管211及び第2の往路温調配管212を経由して各ステージに送り込む。
まず、上ステージ203及び下ステージ204上の設定温度をそれぞれ温度調整機208にセットして、各ステージに配設された温度センサ210により実際の温度を把握する。
温度センサ210で感知した温度が低い場合には、温度制御部の指示により温度調整機208が有する加熱機能によって媒体を設定温度よりも高温に加熱し、或いは、温度センサ210で感知した温度が高い場合には、温度制御部の指示により温度調整機208が有する冷却機能によって媒体を設定温度よりも低温に冷却する。そして、温度調整された媒体を温度調整機208より送り出し、第1の往路温調配管211及び第2の往路温調配管212を経由して各ステージに送り込む。
各ステージに送り込まれた媒体は、第1の温調配管206及び第2の温調配管207内を流れながら各ステージを加熱又は冷却し、第1の復路温調配管213及び第2の復路温調配管215を経由して温度調整機208に取り込まれる。なお、制御弁の制御によって上ステージ203、下ステージ204それぞれを単独に制御することができるとともに、温度差が小さくなった際に媒体の流量の微調整を行う。
この移動ステージ装置202及びプロジェクタ装置201によれば、上述の作用を繰り返すことで、各ステージの温度を一定に保つことができ、ステージ上に載置されたプロジェクタのように放熱する物体に対し、その他のステージを構成する各構成品が温度膨張等の影響を受けることを抑えて、パラレルメカニズムによる、より正確な位置制御を行うことができる。
この移動ステージ装置202及びプロジェクタ装置201によれば、上述の作用を繰り返すことで、各ステージの温度を一定に保つことができ、ステージ上に載置されたプロジェクタのように放熱する物体に対し、その他のステージを構成する各構成品が温度膨張等の影響を受けることを抑えて、パラレルメカニズムによる、より正確な位置制御を行うことができる。
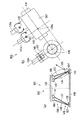
次に、第3実施形態について図18を参照しながら説明する。
なお、上述した他の実施形態と同様の構成要素には同一符号を付すとともに説明を省略する。
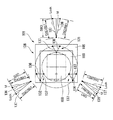
第3の実施形態と第1の実施形態との異なる点は、本実施形態に係るプロジェクタ装置301の移動ステージ装置302が、各ストロークユニット303,305,306と上ステージ103との第1のリンク連結位置(リンク連結位置)307を内接する第1の円(円)308の直径を第1の直径310とし、各ストロークユニット303,305,306と下ステージ105との第2のリンク連結位置(リンク連結位置)311を内接する第2の円(円)312の直径を第2の直径313とするとき、第1の直径310が、第2の直径313よりも小さくされて、アクチュエータアーム136、ロックアーム137、回動軸138が正三角形をなすように長さ調整され、各ストロークユニット303,305,306が120度ずつ均等に配され、下ステージ105に対する姿勢角度が45度とされているとした点である。
なお、上述した他の実施形態と同様の構成要素には同一符号を付すとともに説明を省略する。
第3の実施形態と第1の実施形態との異なる点は、本実施形態に係るプロジェクタ装置301の移動ステージ装置302が、各ストロークユニット303,305,306と上ステージ103との第1のリンク連結位置(リンク連結位置)307を内接する第1の円(円)308の直径を第1の直径310とし、各ストロークユニット303,305,306と下ステージ105との第2のリンク連結位置(リンク連結位置)311を内接する第2の円(円)312の直径を第2の直径313とするとき、第1の直径310が、第2の直径313よりも小さくされて、アクチュエータアーム136、ロックアーム137、回動軸138が正三角形をなすように長さ調整され、各ストロークユニット303,305,306が120度ずつ均等に配され、下ステージ105に対する姿勢角度が45度とされているとした点である。
この移動ステージ装置302及びプロジェクタ装置301によれば、姿勢角度を小さくすることによってアクチュエータアーム136、ロックアーム137のそれぞれの長さの単位変化量に対して下ステージ105面に直交する方向の上ステージ103移動量を小さくすることができる。したがって、この方向の移動精度を高めることができる。
次に、第4実施形態について図19を参照しながら説明する。
なお、上述した他の実施形態と同様の構成要素には同一符号を付すとともに説明を省略する。
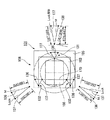
第4の実施形態と第3の実施形態との異なる点は、本実施形態に係るプロジェクタ装置401の移動ステージ装置402が、第2のリンク連結位置311を第2の円312の半径方向にスライドさせるステージ移動精度切換手段403を備え、制御部135が、上ステージ103の面方向に高い精度を必要とする移動の際に、第1の直径310と第2の直径313との差分が大きくなるようにステージ移動精度切換手段403を制御して第2のリンク連結位置311を調整し、上ステージ103面と直交する方向に高い精度を必要とする移動の際に、第1の直径310と第2の直径313との差分が小さくなるようにステージ移動精度切換手段403を制御して第2のリンク連結位置311を調整するとした点である。
なお、上述した他の実施形態と同様の構成要素には同一符号を付すとともに説明を省略する。
第4の実施形態と第3の実施形態との異なる点は、本実施形態に係るプロジェクタ装置401の移動ステージ装置402が、第2のリンク連結位置311を第2の円312の半径方向にスライドさせるステージ移動精度切換手段403を備え、制御部135が、上ステージ103の面方向に高い精度を必要とする移動の際に、第1の直径310と第2の直径313との差分が大きくなるようにステージ移動精度切換手段403を制御して第2のリンク連結位置311を調整し、上ステージ103面と直交する方向に高い精度を必要とする移動の際に、第1の直径310と第2の直径313との差分が小さくなるようにステージ移動精度切換手段403を制御して第2のリンク連結位置311を調整するとした点である。
ステージ移動精度切換手段403は、各ストロークユニット303、305、306に対応して下ステージ105に配されており、各ストロークユニット303、305、306を載置する移動部405と、移動部405を第2の円312の径方向に移動させる図示しない駆動部とを備えている。
駆動部は、ストロークユニット303、305、306の姿勢角度を45度乃至70度の範囲で可変可能に移動部405を下ステージ105上で移動させる機能を有する。
駆動部は、ストロークユニット303、305、306の姿勢角度を45度乃至70度の範囲で可変可能に移動部405を下ステージ105上で移動させる機能を有する。
次に、本実施形態に係るプロジェクタ装置401の移動ステージ装置402における作用・効果について説明する。
上ステージ103に対して下ステージ105面に接する方向の移動精度が必要となる場合、制御部135がストロークユニット303、305、306と下ステージ105とのなす姿勢角度を45度から70度に変更する指示を各ステージ移動精度切換手段403に出す。このとき、駆動部によって移動部405を下ステージ105の第2の円312の径方向内方に移動して固定する。
上ステージ103に対して下ステージ105面に接する方向の移動精度が必要となる場合、制御部135がストロークユニット303、305、306と下ステージ105とのなす姿勢角度を45度から70度に変更する指示を各ステージ移動精度切換手段403に出す。このとき、駆動部によって移動部405を下ステージ105の第2の円312の径方向内方に移動して固定する。
一方、上ステージ103に対して下ステージ105面に直交する方向の移動精度が必要となる場合、制御部135がストロークユニット303、305、306と下ステージ105とのなす姿勢角度を70度から45度に変更する指示を各ステージ移動精度切換手段403に出す。このとき、駆動部によって移動部405を下ステージ105の第2の円312の径方向外方に移動して固定する。
その後は、上述の操作によってそれぞれ上ステージ103を下ステージ105に対して移動させる。
その後は、上述の操作によってそれぞれ上ステージ103を下ステージ105に対して移動させる。
この移動ステージ装置402及びプロジェクタ装置401によれば、移動部405の移動方向によって、各ストロークユニット303、305、306の下ステージ105に対する姿勢角度を変化することができ、ステージ面に接する方向のステージ移動量、或いは、ステージ面に直交する方向のステージ移動量の何れか一方を小さくして、この方向の移動精度を高くすることができる。
次に、第5実施形態について図20及び図21を参照しながら説明する。
なお、上述した他の実施形態と同様の構成要素には同一符号を付すとともに説明を省略する。
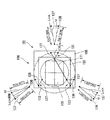
第5の実施形態と第1の実施形態との異なる点は、本実施形態に係るプロジェクタ装置501の移動ステージ装置502における各ストロークユニット503、505、506にて、アクチュエータアーム136の一端136a及びロックアーム137の一端137aが隣接して配され、アクチュエータアーム136の他端136b及びロックアーム137の他端137bが互いに離間して配されているとした点である。
なお、上述した他の実施形態と同様の構成要素には同一符号を付すとともに説明を省略する。
第5の実施形態と第1の実施形態との異なる点は、本実施形態に係るプロジェクタ装置501の移動ステージ装置502における各ストロークユニット503、505、506にて、アクチュエータアーム136の一端136a及びロックアーム137の一端137aが隣接して配され、アクチュエータアーム136の他端136b及びロックアーム137の他端137bが互いに離間して配されているとした点である。
アクチュエータアーム136の一端136aとロックアーム137の一端137aとは、回転ピン145を中心に回動軸138の軸方向に回動可能に一つの2軸ジョイント(接続部)507に結合されている。その他の構成は第1の実施形態に係るプロジェクタ装置501及び移動ステージ装置502と同様とされている。
この移動ステージ装置502及びプロジェクタ装置501によれば、第1の実施形態と同様の作用・効果を得ることができる。
この移動ステージ装置502及びプロジェクタ装置501によれば、第1の実施形態と同様の作用・効果を得ることができる。
なお、本発明の技術範囲は上記実施の形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲において種々の変更を加えることが可能である。
例えば、上記実施形態では、上ステージを6自由度で位置制御するとしているが、アクチュエータアームの本数をA、ロックアームの本数をB、回動ロック手段の数をCとして、N=A+(B+C)/2で表される自由度を制御させても構わない。
この場合、A、B、及び、Cを3とすることによって、上記実施形態と同様の作用・効果を得ることができる。
例えば、上記実施形態では、上ステージを6自由度で位置制御するとしているが、アクチュエータアームの本数をA、ロックアームの本数をB、回動ロック手段の数をCとして、N=A+(B+C)/2で表される自由度を制御させても構わない。
この場合、A、B、及び、Cを3とすることによって、上記実施形態と同様の作用・効果を得ることができる。
また、上記実施形態では、回動ロック手段の回動軸はアクチュエータアームとロックアームとで共通とされているが、アクチュエータアームの第1の回動軸回りの回動をロックする第1の接続部が連結された第1の回動軸と、ロックアームの第2の回動軸回りの回動をロックする第2の接続部が連結された第2の回動軸とを備え、第1の回動軸と第2の回動軸とが平行に配されているとしても構わない。
この場合も、一つの回動軸の場合と同様にアクチュエータアームとロックアームとを支持することができ、各ストロークユニットに係る第1の回動軸及び第2の回動軸の軸方向が、互いに交差する角度(例えば、60度)で配することによって、上記実施形態と同様の作用・効果を得ることができる。
この場合も、一つの回動軸の場合と同様にアクチュエータアームとロックアームとを支持することができ、各ストロークユニットに係る第1の回動軸及び第2の回動軸の軸方向が、互いに交差する角度(例えば、60度)で配することによって、上記実施形態と同様の作用・効果を得ることができる。
101、201、301、401、501 プロジェクタ装置
102 スクリーン面
103、203 上ステージ(エンドステージ)
105、204 下ステージ(ベースステージ)
106、202、302、402、502 移動ステージ装置
108 第1のプロジェクタ(第1の画像手段)
111 第2のプロジェクタ(第2の画像手段)
116 投影光学手段
131、132、133、303、305、306、503、505、506 ストロークユニット
135 制御部(制御手段)
136 アクチュエータアーム
137 ロックアーム
138 回動軸
140 回動ロック手段
146 第1の2軸ジョイント(第1の接続部)
147 第2の2軸ジョイント(第2の接続部)
205 温度調整手段
307 第1のリンク連結位置(リンク連結位置)
308 第1の円(円)
310 第1の直径
311 第2のリンク連結位置(リンク連結位置)
312 第2の円(円)
313 第2の直径
403 ステージ移動精度切換手段
507 2軸ジョイント(接続部)
102 スクリーン面
103、203 上ステージ(エンドステージ)
105、204 下ステージ(ベースステージ)
106、202、302、402、502 移動ステージ装置
108 第1のプロジェクタ(第1の画像手段)
111 第2のプロジェクタ(第2の画像手段)
116 投影光学手段
131、132、133、303、305、306、503、505、506 ストロークユニット
135 制御部(制御手段)
136 アクチュエータアーム
137 ロックアーム
138 回動軸
140 回動ロック手段
146 第1の2軸ジョイント(第1の接続部)
147 第2の2軸ジョイント(第2の接続部)
205 温度調整手段
307 第1のリンク連結位置(リンク連結位置)
308 第1の円(円)
310 第1の直径
311 第2のリンク連結位置(リンク連結位置)
312 第2の円(円)
313 第2の直径
403 ステージ移動精度切換手段
507 2軸ジョイント(接続部)
Claims (15)
- パラレルメカニズムを用いる移動ステージ装置であって、
ベース部とされるベースステージと、
該ベースステージに対向して配されたエンドエフェクタ部とされるエンドステージと、
互いに離間して配されて前記ベースステージと前記エンドステージとをリンクする3個のストロークユニットと、
前記3個のストロークユニットを駆動制御して前記ベースステージに対する前記エンドステージの位置及び姿勢を6自由度で制御する制御手段とを備え、
前記ストロークユニットが、
前記ベースステージと前記エンドステージとをリンクするとともに自らの長さを変化できるアクチュエータアームと、
前記ベースステージと前記エンドステージとの相対的な動きに応じて長さを変化して前記ベースステージと前記エンドステージとの間隔を固定できるロックアームと、
前記ベースステージ又は前記エンドステージと前記アクチュエータアーム及び前記ロックアームのリンク連結位置における所定の一軸回りの回動をロックできる回動ロック手段とを備えていることを特徴とする移動ステージ装置。 - パラレルメカニズムを用いる移動ステージ装置であって、
ベース部とされるベースステージと、
該ベースステージに対向して配されたエンドエフェクタ部とされるエンドステージと、
互いに離間して配されて前記ベースステージと前記エンドステージとをリンクする複数のストロークユニットと、
前記複数のストロークユニットを駆動制御して前記ベースステージに対する前記エンドステージの位置及び姿勢を制御する制御手段とを備え、
前記ストロークユニットが、
前記ベースステージと前記エンドステージとをリンクするとともに自らの長さを変化できるアクチュエータアームと、
前記ベースステージと前記エンドステージとの相対的な動きに応じて長さを変化して前記ベースステージと前記エンドステージとの間隔を固定できるロックアームと、
前記ベースステージ又は前記エンドステージと前記アクチュエータアーム及び前記ロックアームのリンク連結位置における所定の一軸回りの回動をロックできる回動ロック手段とを備え、
前記制御手段が、前記アクチュエータアームの本数をA、前記ロックアームの本数をB、前記回動ロック手段の数をCとした際、N=A+(B+C)/2で表される自由度を制御可能とされていることを特徴とする移動ステージ装置。 - 前記A、前記B、及び、前記Cが3とされていることを特徴とする請求項2に記載の移動ステージ装置。
- 前記制御手段が、制御対象を前記アクチュエータアームと、前記ロックアームと、前記回動ロック手段とされ、
前記ベースステージに対する前記エンドステージの位置及び姿勢を一自由度ずつ制御する際に、前記ロックアームと前記回動ロック手段のロック動作を解除した後、前記アクチュエータアームの長さを変化して前記ロックアームの長さを所定の長さに変化させ、前記ロックアームと前記回動ロック手段とをロックする一連の動作を、前記ストロークユニットそれぞれに対し順次行い、前記ロックアーム全ての長さを固定した後に前記回動ロック手段のロック動作を解除して、前記アクチュエータアームを所定の長さに変化させることを特徴とする請求項1から3の何れか一つに記載の移動ステージ装置。 - 前記一つのストロークユニットを構成する前記アクチュエータアームの一端及び前記ロックアームの一端、又は、前記アクチュエータアームの他端及び前記ロックアームの他端の何れか一方が互いに隣接して配され、他方が互いに離間して配されていることを特徴とする請求項1から4の何れか一つに記載の移動ステージ装置。
- 前記回動ロック手段が、
互いに離間して配された前記アクチュエータアームの端部に連結された第1の回動軸と、
前記ロックアームの端部に連結された第2の回動軸と、
前記アクチュエータアームの前記第1の回動軸回りの回動をロックする第1の接続部と、
前記ロックアームの前記第2の回動軸回りの回動をロックする第2の接続部とを備え、
前記第1の回動軸と前記第2の回動軸とが平行に配されていることを特徴とする請求項5に記載の移動ステージ装置。 - 前記回動ロック手段が、
互いに隣接して配された前記アクチュエータアームの端部と前記ロックアームの端部とにそれぞれ連結された回動軸と、
前記アクチュエータアームの前記回動軸回りの回動と前記ロックアームの前記回動軸回りの回動とを共にロックする接続部とを備えていることを特徴とする請求項5に記載の移動ステージ装置。 - 前記各ストロークユニットに係る前記第1の回動軸及び前記第2の回動軸の軸方向が、互いに交差する角度で配されていることを特徴とする請求項6に記載の移動ステージ装置。
- 前記各ストロークユニットに係る前記回動軸の軸方向が、互いに交差する角度で配されていることを特徴とする請求項7に記載の移動ステージ装置。
- 前記角度が60度とされていることを特徴とする請求項8又は9に記載の移動ステージ装置。
- 前記ベースステージと前記エンドステージとの温度を略同一温度に調整する温度調整手段を備えていることを特徴とする請求項1又は2に記載の移動ステージ装置。
- 前記各ストロークユニットと前記エンドステージとのリンク連結位置を内接する円の直径を第1の直径とし、前記各ストロークユニットと前記ベースステージとのリンク連結位置を内接する円の直径を第2の直径とするとき、
前記第1の直径が、前記第2の直径よりも小さいことを特徴とする請求項5に記載の移動ステージ装置。 - 前記リンク連結位置を前記円の半径方向にスライドさせるステージ移動精度切換手段を備え、
前記制御手段が、前記エンドステージの面方向に高い精度を必要とする移動の際に、前記第1の直径と前記第2の直径との差分が大きくなるように前記ステージ移動精度切換手段を制御して前記リンク連結位置を調整することを特徴とする請求項12に記載の移動ステージ装置。 - 前記リンク連結位置を前記円の半径方向にスライドさせるステージ移動精度切換手段を備え、
前記制御手段が、前記エンドステージ面と直交する方向に高い精度を必要とする移動の際に、前記第1の直径と前記第2の直径との差分が小さくなるように前記ステージ移動精度切換手段を制御して前記リンク連結位置を調整することを特徴とする請求項12に記載の移動ステージ装置。 - 請求項1又は2に記載の移動ステージ装置と、
前記ベースステージ面上に載置され、光学系を介して投影画像を出射する第1の画像手段と、
前記エンドステージ面上に載置され、光学系を介して投影画像を出射する第2の画像手段と、
前記第1の画像手段が出射した投影画像と、前記第2の画像手段が出射した投影画像とを合成した投影画像をスクリーン面に投影する投影光学手段とを備えていることを特徴とするプロジェクタ装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004104373A JP2005292290A (ja) | 2004-03-31 | 2004-03-31 | 移動ステージ装置及びプロジェクタ装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004104373A JP2005292290A (ja) | 2004-03-31 | 2004-03-31 | 移動ステージ装置及びプロジェクタ装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005292290A true JP2005292290A (ja) | 2005-10-20 |
Family
ID=35325313
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004104373A Withdrawn JP2005292290A (ja) | 2004-03-31 | 2004-03-31 | 移動ステージ装置及びプロジェクタ装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005292290A (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009521821A (ja) * | 2006-07-10 | 2009-06-04 | ミツビシ・エレクトリック・リサーチ・ラボラトリーズ・インコーポレイテッド | プロジェクタアレイをアライメントする方法及びシステム |
| CN102581843A (zh) * | 2012-03-09 | 2012-07-18 | 常州大学 | 一种全解析六自由度部分解耦并联操作装置 |
| CN102699906A (zh) * | 2012-03-09 | 2012-10-03 | 常州视觉龙机电设备有限公司 | 一种部分解耦全解析六自由度并联操作平台 |
| JP2013528505A (ja) * | 2010-06-17 | 2013-07-11 | エクセシュン エミレーツ アクチボラグ | ジンバルホルダを備えた平行運動装置 |
| JP2017061034A (ja) * | 2012-08-03 | 2017-03-30 | トヨタ モーター エンジニアリング アンド マニュファクチャリング ノース アメリカ,インコーポレイティド | 識別された投影表面に像を投影するためのプロジェクターを具備するロボット |
| KR20210142281A (ko) * | 2020-05-18 | 2021-11-25 | 삼승테크(주) | 3축 모션 플랫폼 |
-
2004
- 2004-03-31 JP JP2004104373A patent/JP2005292290A/ja not_active Withdrawn
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009521821A (ja) * | 2006-07-10 | 2009-06-04 | ミツビシ・エレクトリック・リサーチ・ラボラトリーズ・インコーポレイテッド | プロジェクタアレイをアライメントする方法及びシステム |
| JP4942752B2 (ja) * | 2006-07-10 | 2012-05-30 | ミツビシ・エレクトリック・リサーチ・ラボラトリーズ・インコーポレイテッド | プロジェクタアレイをアライメントする方法及びシステム |
| JP2013528505A (ja) * | 2010-06-17 | 2013-07-11 | エクセシュン エミレーツ アクチボラグ | ジンバルホルダを備えた平行運動装置 |
| CN102581843A (zh) * | 2012-03-09 | 2012-07-18 | 常州大学 | 一种全解析六自由度部分解耦并联操作装置 |
| CN102699906A (zh) * | 2012-03-09 | 2012-10-03 | 常州视觉龙机电设备有限公司 | 一种部分解耦全解析六自由度并联操作平台 |
| JP2017061034A (ja) * | 2012-08-03 | 2017-03-30 | トヨタ モーター エンジニアリング アンド マニュファクチャリング ノース アメリカ,インコーポレイティド | 識別された投影表面に像を投影するためのプロジェクターを具備するロボット |
| KR20210142281A (ko) * | 2020-05-18 | 2021-11-25 | 삼승테크(주) | 3축 모션 플랫폼 |
| KR102344797B1 (ko) * | 2020-05-18 | 2021-12-29 | 삼승테크(주) | 3축 모션 플랫폼 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102326114B (zh) | 光轴调整装置、光轴调整方法及投射型显示装置 | |
| CN104718446B (zh) | 离线工业燃气轮机及其它发电机械的目视检查与三维白光扫描系统和方法 | |
| US7832947B2 (en) | Driving mechanism | |
| JP6504274B2 (ja) | 三次元形状データおよびテクスチャ情報生成システム、撮影制御プログラム、及び三次元形状データおよびテクスチャ情報生成方法並びに情報記録媒体 | |
| TW200941154A (en) | Image position adjustment device and optical device | |
| US20100229452A1 (en) | Firearm system having camera unit with adjustable optical axis | |
| US8780359B2 (en) | Optical base plate alignment | |
| CA2475896A1 (en) | Determining relative positional and rotational offsets | |
| JP2015526642A (ja) | 回転ギアモード中のオフライン産業用ガスタービンおよび他の発電機械の光学検査システムおよび方法 | |
| CN103562674A (zh) | 光学形状测定装置、形状测定的方法以及制造具有形状的结构的方法 | |
| JP2005292290A (ja) | 移動ステージ装置及びプロジェクタ装置 | |
| CN115761011A (zh) | 一种线激光3d相机系统全自动标定方法及装置 | |
| Ashdown et al. | Steerable projector calibration | |
| US20220417399A1 (en) | System and method for lens alignment and bonding | |
| US20220063104A1 (en) | Calibration method for tool center point, teaching method for robotic arm and robotic arm system using the same | |
| KR101035895B1 (ko) | 3차원형상 측정장치 | |
| KR100861409B1 (ko) | 파노라마 엑스선 촬영장치 및 이를 이용한 촬영방법 | |
| JP6111356B1 (ja) | 投影装置 | |
| JPWO2021005711A5 (ja) | ||
| TWI444686B (zh) | 對位裝置 | |
| CN106546188A (zh) | 一种用于人体3d扫描的两自由度调整机构 | |
| JP5395643B2 (ja) | 直交度の計測方法、ステージ機構および転写装置 | |
| US10996106B2 (en) | Luminous body measurement apparatus and luminous body measurement method comprising a control unit to pivot a first and a second arm to hold an image pickup device in plural postures | |
| JP2011232751A (ja) | 調整可能な光学素子を有する光学モジュール | |
| JP7318190B2 (ja) | 形状測定装置、形状測定方法及び形状測定プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20070605 |