【産業上の利用分野】
在宅健康管理としての生体情報の取得や結果の表示など被験者を探してロボット自らが移動するなどして、被験者に健康管理を実施する旨表示または音声合成でナビゲーションして、予めプログラムするか、通信手段で命令された、取得するべき複数の生体情報を測定することが可能な、ロボットによる在宅管理システムである。生体情報を取得する際には、ロボット自身が、表示装置に操作方法などを適切に表示あるいは、音声合成技術で被験者にアドバイスすることが出来る。該被験者は、ロボットのアドバイスに従って問診を受けると共に、複数のバイタルサインを取得することが可能である。該ロボットは、音声認識と音声合成で実施する問診に対して、該被験者の回答ならびに複数取得した生体情報を該被験者バイタルデータとして記憶保存や通信手段によって外部に通信する機能を具備している。またロボットは、在宅健康管理を実施するだけでなく、生活支援としての、例えば、防犯、火災検出、音声伝言、留守番、家電製品の操作、スケジュール管理、電話機能、電子メール送受信、日常会話などを実施が可能であることを特徴とした家庭用ロボットであってもよい。
【従来の技術】
一般に家庭用に開発されたロボットとしては、移動機構の有無に問わず、防犯、アミューズメント、会話を目的としている。この様な家庭用として開発されたロボットは、ロボットブームの中にあってペット的な対応商品であって、本当に消費者にとって必要なアイテムと言える存在かどうか疑わしいものである。また来る高齢社会における在宅健康管理を主機能として生体情報を取得して、病気予防的健康維持管理機能を具備した家庭用ロボットは、未だ無いのである。
【発明が解決しようとする問題点】
昨今では健康保険組合が破綻して、医療費負担が3割になったことで、我々国民も健康に対する意識が変わりつつある。例えば最近の健康志向ブームがその最たるものであろう。意識の変化としては、病気予防の健康維持がある。つまり日常生活で出来るだけ健康状態を維持することで、免疫機能を高めるなどして、病気になり難い身体を維持することである。今後は、来る超高齢化社会に於いて、より一層、健康に対する意識が高まると予想されるものと考えられる。生活支援の家庭用ロボットと共に当該在宅健康管理機器の必要性が高齢者介護機器と同様に増える事が予想される。したがって、家庭用ロボットに生体情報取得機能を具備させて、健康管理に応用させることは、将来的に重要なコンセプトである。
【課題を解決するための手段】
住宅メーカと家電業界が開発している健康機器として、例えば便器に尿の成分を分析するセンサーを組み込んだ製品が既に開発されている。本センサー機能付き便器で得られる生体情報は、家庭内ネットワーク対応が一般的である。このことから、家庭用で使用されるであろう家庭用ロボットに上述したセンサー機能付き便器からの生体情報を無線LANで転送すれば、ロボットが家庭内における全ての被験者バイタルデータを管理することが可能となる。ただ家庭内で複数の被験者を管理するので、それぞれの被験者の認証をID番号や指紋・顔画像認証などで管理する必要があるのは言うまでもない。最近の家電製品は、家庭内ネットワーク対応となってきており、将来的には全ての家電製品が家庭ネットワークで接続される時代になるはずである。家庭内のネットワークシステムは、伝送距離が短いこともあって、無線LANも十分その機能を果たすことが可能である。生体情報取得では、脈波、脈拍、血圧、皮膚温度、心電図、動脈血酸素飽和度などがあるが、性別、年齢、体重、問診による項目、体脂肪率、身長、尿成分が測定可能ならばさらに精度良く健康状態を推論することが出来るようになる。生活支援としては、就寝中や留守時の防犯対策あるいは火災検出などがある。さらに電子メールの送受信、降雨時の連絡、ガス漏れ、その他の異常事態を早急に検出できる機能を付加すればよい。また家庭内オートメーション機能として、冷暖房設備やテレビのON/OFF、風呂の自動運転、さらにはカーテンを自動的に閉めたり開けたりする機能だけでなく、ペットに餌を上げる機械を操作するのに該家庭用ロボットを介して操作が可能であると便利である。該家庭用ロボットを介して、上述した各家庭内ネットワークあるいは家庭オートメーション機能を働かせるには、操作ボタンを押すのではなく、該家庭用ロボットに具備した図1及び図2音声認識機能と音声合成による操作ナビゲーション機能が有効である。また遠隔操作によって、該家庭用ロボットを操作するときには、携帯電話、PHSや携帯端末から操作信号によって図6家庭内ネットワークを介して実施すると良い。生体情報としての脈波、脈拍、血圧、皮膚温度は、被験者の末梢部位で測定するのが適切であって、抹消部位は、耳たぶまたは指でよいが、バイタルデータの精度を高めるためには、図8のような指尖が望ましい。通常の生体情報取得は、図5の手順で実施するとよい。その生体情報の脈波は、指尖皮膚上から赤外光を照射して血液中のヘモグロビンによって吸収、反射する光成分を受光素子で捉えて電気信号に変換するのが一般的で都合がよい。血圧、脈拍は、圧力波として圧力センサーで測定可能である。皮膚温度は、指の接触する部分に温度によって抵抗値が変化するサーミスタを設けておき、前記抵抗値の変化から皮膚温度が推論出来る。動脈血酸素飽和度の測定原理は、血液中のヘモグロビンの酸化・還元によって、酸素が運ばれていると考えるのである。つまり酸化すると赤色光の吸収が減少して、赤外光の吸収が増えるので、ヘモグロビンの光学的特性変化を脈波で測定するのと同一のセンサーで実施することが可能である。また通常該生体情報は、計測時間として20〜30秒くらい必要であるが、バイタルデータ処理はバッチ処理で実施するので安価なマイクロチップで十分な演算を実施可能である。生体情報取得機能付き家庭用ロボットには、外部に通信する手段として無線LANの他に携帯電話やPHSなど公衆の通信回線を利用しても良い。
【発明の実施の形態】
生体情報として脈波を取得してバイタルデータとする場合には、図3に表すように該脈波の波形変化があまり無く単純形であって、コンピュータで解析しても正確な健康診断が実施し難い。したがって脈波を2階乗微分して、図4の加速度脈波(APG)とすることで波形の変化を大きくして、コンピュータでの健康診断が実施しやすくなるのである。脈波を指尖で測定する意味として、心臓から吐出される血流は、指尖の末梢に伝達されると、心拍動、血行動態、細動脈系の性状変化など生理的条件の影響を多分に受けて波形に反映されるのである。生体情報としての脈波を図3の波形で示している。さらに図4は加速度脈波を示すものである。加速度脈波は、A,B,C,D,E、の五つの要素波で成っていおり、前記要素波は、心臓収縮期の波である。加速度脈波における頂点Aは、指尖容積脈波(DPG)の収縮波での最初の立ち上り点と一致して、頂点Eは、指尖容積脈波拡張期波の始まりと一致するのである。したがって、頂点Aから頂点Eまでの所要時間は、心臓の収縮時間軸長さと一致するようになる。図4の加速度脈波における頂点Aは、プラス側における陽性波であり、頂点Bは、マイナス側における陰性波である。次に頂点C、D,E波は、それぞれ生理状態によってプラス側になったり、マイナス側に成ったりする変化する波である。これまでに判明している事項に、被験者が緊張状態にある場合には、心拍数が増加して、指尖血流は減少する傾向にあって、頂点B波は小さくなって、逆に頂点D波は大きくなるようである。波形の解析上では、B/Aが増加して、D/Aが減少するかを見ることになる。一般的に緊張状態においては、自律神経系の交感神経が優位になる現象である。
また、動脈血酸素飽和度は、波長の違う赤外光と赤色光を指尖に照射してから受光部で該光を電気信号に変換する。つまり該測定原理としては、血液中のヘモグロビンの酸素は、血液が酸化・還元作用によって行われるので、赤外光の吸収が減少し赤色光の吸収が増加するならば、還元される。その逆に赤外光の吸収が増加し赤色光の吸収が減少するならば、酸化しているのである。 通常、健康体の動脈血酸素飽和度は、95〜100と言われている。このように生体情報としての加速度脈波における波形の状態と脈拍、動脈血酸素飽和度など他の関連するバイタルサインとを併用して、コンピュータで解析すると、被験者の健康状態を精度良く推論することが可能になる。したがって、在宅健康管理システムのプログラムでは、血圧、尿成分、皮膚温度などに異常が見られない場合でも加速度脈波または動脈血酸素飽和度に何らかの異常現象が現れた場合には、不安定状態であると図6表示装置や図2音声合成にて出力されて、被験者に注意を促すように出来るのである。これらは図7に示すように自動的にコンピュータで処理されて実行されるシステムになっている。さらに該バイタルデータとして、予め提携または登録した医療機関に通信手段で転送されて、定期的に医療機関から生活指導が受けられるようにしても良い。なお、動脈血酸素飽和度の測定原理は、一例であって該方法以外でも実施可能であることは、言うまでもない。したがって、該システムは、家庭用ロボットを使用した在宅健康管理のビジネスモデルとして成立していると言える。
【発明の効果】
来る超高齢化社会やハンディキャップを持つ人々に対して在宅健康管理が家庭で気軽に実施できる機能以外に、当該ロボットをアミューズメントロボットとして会話を楽しむなど、ペットとして扱うことが出来る。また、身近な生活支援用のロボットとして家電製品を音声認識でコントロールすることも可能であるような夢のような生活が実現できるのである。該ロボットには、表示装置を具備しており電子メールの受信、あるいはデジタルカメラ、DVDの表示装置として使用することが出来る。また定期的に該家庭用ロボットに記憶した生体情報を医療関係に転送して、医者などに生活指導や診断行為を実施して貰うことが可能となる。生体情報を定期的に継続して取得して記憶・保存するため、長期間における被験者の健康状態でのバイタルデータを統計することが可能である。したがって、万一病気等によって病院の医師に診察を受ける場合には、記憶・保存した生体情報を出力して持参することが出来るほか、通信手段で直接、病院に送付することが可能な在宅健康管理機能を具備した家庭用ロボットとなる。
【図面の簡単な説明】
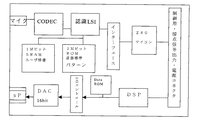
【図 1】音声認識・音声合成・認識制御出力・ブロック図
【図 2】音声認識でのロボット制御回路説明
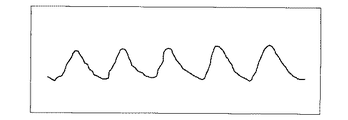
【図 3】脈波の波形
【図 4】加速度脈波の基本波形(脈波を2階乗微分)
【図 5】生体情報取得手段と家庭用ロボットの制御フローチャート図である。
【図 6】在宅健康管理機能を具備した家庭用ロボット説明図である。
【図 7】ネットワーク接続のロボットおよびロボットシステム図である。
【図 8】ロボットに具備した生体情報取得手段を説明した図である。
【符号の説明】
10 画像取得手段
11 表示装置
12 腕機構
20 在宅健康管理機能を具備したロボット本体
30 移動用脚機構
40 記録・再生手段[Industrial applications]
The robot moves by searching for the subject, such as obtaining biometric information and displaying the results as home health management, and the subject is informed that health management is to be performed or navigation is performed by voice synthesis, and is programmed or communicated in advance. This is a home management system by a robot, which can measure a plurality of pieces of biological information to be acquired, which is instructed by a means. When acquiring the biological information, the robot itself can appropriately display the operation method or the like on the display device or can advise the subject using the voice synthesis technology. The subject can be interviewed according to the advice of the robot and can acquire a plurality of vital signs. The robot has a function of storing and storing the subject's answer and a plurality of obtained biological information as the subject vital data in response to an inquiry performed by voice recognition and voice synthesis, and communicating with the outside through communication means. The robot not only performs home health management, but also supports daily life such as crime prevention, fire detection, voice message, answering machine, home appliance operation, schedule management, telephone function, e-mail transmission, daily conversation, etc. It may be a home robot characterized in that it can be implemented.
[Prior art]
Generally, robots developed for home use are intended for crime prevention, amusement, and conversation with or without a moving mechanism. Such a robot developed for home use is a pet-like product in the robot boom, and it is doubtful that it is a truly necessary item for consumers. In addition, there is not yet a home robot that acquires biological information with the main function of home health management in the coming aging society and has a disease preventive health maintenance management function.
[Problems to be solved by the invention]
In recent years, the health insurance union has gone bankrupt and medical expenses have fallen to 30%. For example, the recent health-oriented boom may be the best. Changes in consciousness include maintaining health to prevent disease. In other words, by maintaining a healthy state as much as possible in daily life, enhancing the immune function, etc., and maintaining a body that is unlikely to be ill. In the coming super-aging society, it is expected that health awareness will be further increased. It is anticipated that the need for the home health care device together with the home robot for life support will increase as well as the elderly care device. Therefore, providing a home robot with a biometric information acquisition function and applying it to health management is an important concept in the future.
[Means for Solving the Problems]
As a health device developed by the home maker and the home appliance industry, for example, a product in which a sensor for analyzing a component of urine is incorporated in a toilet bowl has already been developed. The biological information obtained by the toilet with the sensor function is generally compatible with a home network. From this, if the biological information from the above-mentioned toilet with sensor function is transferred to the home robot that will be used at home by wireless LAN, the robot can manage all the subject vital data in the home. It becomes possible. However, since a plurality of subjects are managed at home, it is needless to say that it is necessary to manage the authentication of each subject by ID number, fingerprint / face image authentication, and the like. Recent home appliances have become compatible with home networks, and in the future all home appliances will be connected to the home network. Since the transmission distance of the home network system is short, the wireless LAN can sufficiently fulfill its function. In the biological information acquisition, there are pulse wave, pulse, blood pressure, skin temperature, electrocardiogram, arterial blood oxygen saturation, etc., but if gender, age, weight, interview items, body fat percentage, height, urine component can be measured, It becomes possible to infer the health condition with high accuracy. Life support includes crime prevention measures during bedtime and absence, and fire detection. In addition, a function may be added that can detect e-mail transmission / reception, communication at the time of rainfall, gas leakage, and other abnormal situations immediately. In addition, home automation functions include not only the function of turning on / off the air conditioner and television, the automatic operation of the bath, the function of automatically closing and opening the curtain, but also the operation of the machine that feeds pets. It is convenient to be able to operate via a home robot. In order to operate the above-mentioned home network or home automation function via the home robot, instead of pushing the operation button, the home robot shown in FIGS. 1 and 2 is provided with a voice recognition function and voice synthesis. The operation navigation function is effective. When the home robot is operated by remote control, the operation may be performed via a home network in FIG. 6 by an operation signal from a mobile phone, a PHS or a mobile terminal. The pulse wave, pulse, blood pressure, and skin temperature as the biological information are appropriately measured at the peripheral part of the subject, and the peripheral part may be the earlobe or the finger, but in order to improve the accuracy of the vital data, A fingertip as shown in FIG. 8 is desirable. Normal biological information acquisition may be performed according to the procedure shown in FIG. The pulse wave of the biological information is generally and conveniently converted to an electric signal by irradiating infrared light from above the fingertip skin and capturing a light component absorbed and reflected by hemoglobin in blood with a light receiving element. . Blood pressure and pulse can be measured by a pressure sensor as a pressure wave. The skin temperature can be inferred from the change in the resistance value by providing a thermistor whose resistance value changes according to the temperature in a portion where the finger contacts. The principle of measuring arterial oxygen saturation is that oxygen is carried by the oxidation and reduction of hemoglobin in the blood. That is, when oxidized, the absorption of red light is reduced and the absorption of infrared light is increased, so that it is possible to carry out the change in the optical characteristics of hemoglobin with the same sensor as that used for measuring the change in the pulse wave. In general, the biological information requires about 20 to 30 seconds as a measurement time. However, since the vital data processing is performed by batch processing, a sufficient calculation can be performed with an inexpensive microchip. The home robot with the biometric information acquisition function may use a public communication line such as a mobile phone or a PHS in addition to a wireless LAN as a means for external communication.
BEST MODE FOR CARRYING OUT THE INVENTION
When a pulse wave is acquired as biological information and is used as vital data, the waveform of the pulse wave does not change much as shown in FIG. Difficult to do. Therefore, the pulse wave is differentiated by the second factor to obtain the acceleration pulse wave (APG) shown in FIG. In the sense that pulse waves are measured at the fingertips, the blood flow discharged from the heart, when transmitted to the periphery of the fingertips, may possibly affect the effects of physiological conditions such as heartbeat, hemodynamics, changes in the characteristics of the arteriole system. And is reflected in the waveform. A pulse wave as biological information is shown by a waveform in FIG. FIG. 4 shows an acceleration pulse wave. The acceleration pulse wave is composed of five element waves A, B, C, D, and E, and the element waves are waves in the systole. The vertex A in the acceleration pulse wave coincides with the first rising point in the contraction wave of the finger plethysmogram (DPG), and the vertex E coincides with the beginning of the finger plethysmogram diastolic wave. Therefore, the required time from the vertex A to the vertex E matches the contraction time axis length of the heart. The vertex A in the acceleration pulse wave in FIG. 4 is a positive wave on the plus side, and the vertex B is a negative wave on the minus side. Next, the vertices C, D, and E are waves that change on the plus side or the minus side depending on the physiological state. It has been found that when the subject is nervous, the heart rate increases, the fingertip blood flow tends to decrease, the peak B wave decreases, and The D-wave appears to be large. In analyzing the waveform, it is determined whether B / A increases and D / A decreases. Generally, in a tension state, the sympathetic nerve of the autonomic nervous system becomes dominant.
The arterial blood oxygen saturation is obtained by irradiating a fingertip with infrared light and red light having different wavelengths, and then converting the light into an electric signal by a light receiving unit. That is, as the measurement principle, the oxygen of hemoglobin in blood is reduced if the absorption of infrared light is reduced and the absorption of red light is increased because blood is oxidized / reduced. Conversely, if the absorption of infrared light increases and the absorption of red light decreases, then it is oxidized. Usually, the arterial blood oxygen saturation of a healthy body is said to be 95 to 100. In this way, by analyzing the state of the waveform in the acceleration pulse wave as biological information and other related vital signs such as pulse, arterial oxygen saturation and the like in combination, it is possible to infer the health condition of the subject with high accuracy. Will be possible. Therefore, in the program of the home health care system, even if no abnormality is found in blood pressure, urine component, skin temperature, etc., if any abnormal phenomenon appears in the acceleration pulse wave or arterial blood oxygen saturation, the state is unstable. 6 is output by the display device in FIG. 6 or the speech synthesis in FIG. 2 to call attention to the subject. These are systems which are automatically processed and executed by a computer as shown in FIG. Further, the vital data may be transferred to a medical institution that has been affiliated or registered in advance by communication means so that daily guidance can be received from the medical institution. Note that the measurement principle of the arterial blood oxygen saturation is merely an example, and it goes without saying that it can be implemented by other methods. Therefore, it can be said that this system is established as a business model of home health care using a home robot.
【The invention's effect】
In addition to the function of easily performing home health care at home for the coming super aging society and people with handicap, the robot can be treated as a pet, such as enjoying conversation as an amusement robot. In addition, it is possible to realize a dream-like life in which home appliances can be controlled by voice recognition as a robot for everyday life support. The robot is provided with a display device, and can be used as a display device for receiving an e-mail, a digital camera, or a DVD. In addition, it is possible to periodically transfer the biological information stored in the home robot to medical services, and to have a doctor or the like carry out living guidance and diagnosis. Since biological information is continuously acquired, stored, and stored on a regular basis, it is possible to statistically measure vital data of a subject for a long period of time. Therefore, in the unlikely event that a doctor at a hospital is consulted due to illness or the like, home healthcare that can output and store the stored and stored biometric information and send it directly to the hospital via communication means It becomes a home robot with a management function.
[Brief description of the drawings]
[Fig. 1] Speech recognition / speech synthesis / recognition control output / block diagram [Fig. 2] Explanation of robot control circuit in speech recognition [Fig. 3] Waveform of pulse wave [Fig. 4] Basic waveform of acceleration pulse wave (pulse wave 2nd derivative)
FIG. 5 is a control flowchart of a biological information acquisition unit and a home robot.
FIG. 6 is an explanatory diagram of a home robot having a home health management function.
FIG. 7 is a diagram of a robot and a robot system connected to a network.
FIG. 8 is a diagram illustrating a biological information acquisition unit provided in the robot.
[Explanation of symbols]
DESCRIPTION OF SYMBOLS 10 Image acquisition means 11 Display device 12 Arm mechanism 20 Robot main body 30 provided with home health management function Leg mechanism for movement 40 Recording / reproduction means