JP2004237364A - ロボットのティーチングデータの作成方法 - Google Patents
ロボットのティーチングデータの作成方法 Download PDFInfo
- Publication number
- JP2004237364A JP2004237364A JP2003025756A JP2003025756A JP2004237364A JP 2004237364 A JP2004237364 A JP 2004237364A JP 2003025756 A JP2003025756 A JP 2003025756A JP 2003025756 A JP2003025756 A JP 2003025756A JP 2004237364 A JP2004237364 A JP 2004237364A
- Authority
- JP
- Japan
- Prior art keywords
- data
- robot
- programming language
- teaching
- conversion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Landscapes
- Numerical Control (AREA)
- Manipulator (AREA)
Abstract
【解決手段】3次元CAD装置7で作成したロボットの動作のシミュレーションデータをオフラインティーチングデータ自動変換装置5に取り込んで、ネットワークで接続されたプログラミング言語変換DB6内に記録されている情報を用いて、シミュレーションデータをロボット1,2ごとに定められているプログラミング言語に適合したデータに変換し、変換したデータをロボット1,2の動作を制御するティーチングデータとして出力する。
【選択図】 図1
Description
【発明の属する技術分野】
本発明は、ロボットの動作をティーチングするデータをオフラインで作成する方法に関する。
【0002】
【従来の技術】
自動車の製造工程のうち、溶接や、塗装などの幾つかの工程では、コンベアで搬送される車体などのワークに対してロボットが自動で作業を行う方法がとられている。この場合に、ロボットには、必要な作業の内容や、移動量(位置)、動作のタイミングなどの情報を、あらかじめ記憶させておく必要がある。
【0003】
実際の製造を行う前に、製造に必要な情報をロボットに記憶させることをティーチング(教示)といい、この作業は、ロボットの製造メーカー(ロボット製造メーカー)から提供されるプログラムやデータ処理装置を利用して作成したティーチングデータをロボットのコントローラに登録することにより行われている(例えば、特許文献1参照。)。
【0004】
特許文献1では、溶接ロボットのティーチングデータを作成する3次元オフライン自動ティーチングシステムが開示されている。この3次元オフライン自動ティーチングシステムは、溶接部材の設計CAD(Computer Aided Design)データを読み込んで、溶接ロボットのロボット製造メーカーごとに異なる複数種類のパターンを定義したデータベースを参照しながら、部材形状の認識や、溶接姿勢の決定、動作パターンの選択を行い、その溶接ロボットに適合したティーチングデータを作り出す。この3次元オフライン自動ティーチングシステムで作成されたティーチングデータを溶接ロボットのコントローラに登録すると、その溶接ロボットで溶接部材の溶接が可能になる。また、グラフィックディスプレー上で3次元動作シミュレーションを行って、動作の適否を確認できる。
【0005】
【特許文献1】
特開平10−207524号公報(段落番号0001、0005から0007、0021、0054、図1)
【0006】
【発明が解決しようとする課題】
前記したようにオフラインでティーチングデータが作成できる場合であっても、姿勢の決定や、パターンの選択などは、ロボット製造メーカーが指定するプログラミング言語に従って行う必要があるので、作業者はロボット製造メーカーが指定するプログラミング言語に習熟しなければならない。ここで、生産ライン上は、種類の異なる多数のロボットを配置することが多く、異なるロボット製造メーカーのロボットを使用する際には、各ロボット製造メーカーごとに異なるデータ処理装置を用意し、作業者は、各ロボット製造メーカーごとに異なるプログラミング言語に習熟しなければならなかった。特に、複数種類の製品を生産する生産ラインや、定期的に新しい製品の生産を開始する生産ラインでは、このような問題はさらに顕著なものになる。
本発明は、前記の問題を鑑みてなされたものであり、その目的とするところは、生産ラインにおいてロボットを用いて自動生産を行う際に、ロボットの動作をティーチングする作業の煩雑さを解消し、作業効率の向上を図ることである。
【0007】
【課題を解決するための手段】
前記の課題を解決するために、本発明では生産ラインのレイアウト設計などのために作成されるデータに着目し、そのようなデータから各ロボットに適合したティーチングデータを作成するようにした。すなわち、コンピュータを用いた設計支援装置に搭載されたプログラミング言語を使って作成されたデータであって、生産ラインに使用されるロボットの動作を記述した第一のデータを取得して、ロボットの制御用に使用されるプログラミング言語で作成された第二のデータであるティーチングデータを作成するにあたり、第一のデータを記述するために用いられるプログラミング言語の命令と、ティーチングデータを記述するためにロボットの種類ごとに用いられるプログラミング言語の命令とを対応付けて構築されたデータベースを、第一のデータに含まれるロボットの種類を特定する情報と、第一のデータに記述されている命令とで検索して、ロボットの種類ごとに用いられるプログラミング言語の命令を取得し、第一のデータの命令をティーチングデータを記述するプログラミング言語の命令に変換するものである。
【0008】
第一のデータのデータ形式は、本来はロボットの動作を制御するデータとは異なるが、データベースを利用してデータの必要な箇所を変換することで、直接にロボットを制御できる形式のデータに変換されることになる。種類の異なる複数のロボットのティーチングデータを作成する際でも、設計支援装置で作成したデータ形式を変換するだけで、ロボットの種類ごとに異なる形式のデータを作成することができる。
【0009】
【発明の実施の形態】
本発明の実施形態について図面を参照しながら詳細に説明する。
本実施形態は、自動車などの生産ラインにおいて、ロボットを用いて自動車ごとに定められた溶接や、塗装、あるいは部品の搬送などを自動で行うにあたり、その動作の手順を記述したプログラムからなるティーチングデータを、生産ラインの作業者が使用する3次元の設計支援(CAD)装置で作成した第一のデータ(ロボットシミュレーションデータ)から、ロボットの制御に適した形式の第二のデータとして作成するものである。
【0010】
図1は、ティーチングデータの作成処理が行われるシステムの概略構成図である。図1には、生産ラインに配設される種類の異なる多数のロボットの例として、部品の搬送を行うアーム部分1aおよびコントローラ1bとからなるロボット1と、塗装を行うアーム部分2aおよびコントローラ2bからなるロボット2とが図示されており、ロボット1またはロボット2に適合した形式のティーチングデータがオフラインティーチングデータ自動変換装置5により作成されるようになっている。なお、ロボット1とロボット2とは、プログラム形式の異なるティーチングデータで動作の制御が行われるものとする。その理由としては、ロボット1とロボット2との製造メーカーが異なることや、ロボット1,2の役割に応じて先端部分の構成や、関節数などが異なることがあげられる。また、生産ラインに配置されるロボットの種類は、1種類でも良いし、3種類以上でも良い。同様に、ロボットの動作に使用されるプログラミング言語の種類も1種類でも良いし、複数の種類でも良い。
【0011】
ティーチングデータをオフライン、つまりロボット1,2とは独立に作成できるデータ処理装置であるオフラインティーチングデータ自動変換装置5は、CPU(Central Processing Unit)などを備える制御装置や、データの記憶が可能な記憶装置、他のコンピュータと通信するための通信制御装置などを備えるコンピュータに所定のプログラムを起動させることで実現され、生産ラインを構成する設備のデータとして作成されるロボットシミュレーションデータを取り込んでロボット1,2ごとのティーチングデータを作成し、出力する。また、このオフラインティーチングデータ自動変換装置5には、必要に応じて、キーボードなどの入力手段や、表示手段が付加される。
【0012】
なお、ティーチングデータを作成するにあたって、オフラインティーチングデータ自動変換装置5の制御装置は、他のコンピュータなどに置かれているプログラミング言語変換DB(Database)6を参照して、ロボットシミュレーションデータに含まれる所定の情報を、該当するロボット1,2に適合したプログラミング言語で記述された情報に変換し、ティーチングデータを作成する処理を行う変換処理手段51(図2参照)として機能する。
【0013】
ここで、ロボットシミュレーションデータとは、生産ラインの設計者や、工程管理を行う作業者が、生産ラインで使用する設備の設計作業や、レイアウト作業を3次元CAD装置7を用いて行った結果として得られるデータであって、治工具、搬送装置、移載装置、付帯設備などの設計データからロボット1,2に関連する部分を抽出したものである。通常、この種のデータは、生産ラインを流れる自動車などの製品間の干渉や、ロボット1,2間の干渉、製品とロボット1,2の間の干渉などを検証するシミュレーションのために用いられる。図2にロボットシミュレーションデータのデータ構成の一例を示す。ロボットシミュレーションデータRDは、設計者が絶対座標軸上でのロボット1,2の座標軸のずれ量、傾き、およびロボット1,2の駆動モデルのデータなどの変数を環境のデータとして記録する設定情報(環境情報)rd1と、マスタファイル(変数をシンボル(コマンド)化して記述したファイル)rd2と、移動軌跡や姿勢情報といったロボット1,2の動作形態の情報や、移動速度(速度指令)などを指示する命令文を主要素とするメインデータrd3とからなり、3次元CAD装置7に搭載されているプログラミング言語に則ったデータ形式になっている。
【0014】
また、異なるプログラミング言語間の変換処理の際に参照されるデータベースであるプログラミング言語変換DB6は、ロボット1,2に特定の処理(動作)を行わせる命令(コマンド)であって、ロボットシミュレーションデータRDを作成する3次元CAD装置7に搭載されているプログラミング言語で記述された命令と、ロボット1,2のコントローラ1b,2bがデータ処理可能なプログラミング言語で記述された命令とが、同じ処理を実現する命令どうしを関連付けて格納されている。以下、区別のために、3次元CAD装置7に搭載されているプログラミング言語を変換元言語とし、ロボット1で使用されるプログラミング言語を第一の変換先言語、ロボット2で使用されるプログラミング言語を第二の変換先言語とする。
【0015】
このプログラミング言語変換DB6は、図2に示すように、変換元言語と第一の変換先言語とで同じ処理を行わせる命令どうしを関連付けて構築し、ロボット1のティーチングデータTD1の作成に用いられるプログラミング言語変換DB6aと、変換元言語と第二の変換先言語とで同じ処理を行わせる命令どうしを関連付けて構築し、ロボット2のティーチングデータTD2の作成に用いられるプログラミング言語変換DB6bとを別々に備え、ロボットシミュレーションデータRDに含まれるロボット1,2の種類を特定する情報を識別子としてデータベースの選択を行えるようにする。
【0016】
これに対して、変換元言語と、第一の変換先言語及び第二の変換先言語とで同じ処理を行わせる命令どうしを関連付けて、1つのデータベースを構築し、データベース内のデータをロボット1,2の種類を検索条件によって選択するようにしても良い。
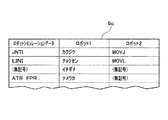
図3に一例を示すプログラミング言語変換DB6cは、設計者が3次元CAD装置7でシミュレーションを行う際に各ロボット1,2について3次元CAD装置7用の命令として使用される変換元言語の命令(「JNTI」、「LINI」など)と、ロボット1の制御に用いられる第一の変換先言語の命令(「カクジク」、「チョクセン」など)と、ロボット2の制御に用いられる第二の変換先言語の命令(「MOVJ」、「MOVL」など)とが対応付けて格納されている。すなわち、プログラミング言語変換DB6cでは、3次元CAD装置7が使用するデータ形式での命令、例えば「JNTI」と、ロボット1のコントローラ1bが処理可能なデータ形式での命令である「カクジク」と、ロボット2のコントローラ2bが処理可能なデータ形式での命令である「MOVJ」とが同一の処理を行わせる命令であるとの定義付けがなされている。図3の例では、命令が各プログラミング言語ごとに配列されて格納されているので、ロボット1又はロボット2を検索子とすることで必要な命令のみを抽出することができる。
【0017】
次に、図2に示すティーチングデータTD1,TD2が作成される処理の具体例について、以下に説明する。
まず、オフラインティーチングデータ自動変換装置5は、3次元CAD装置7を用いて作成したロボットシミュレーションデータRDを取得する。入力手法としては、記録媒体に記録したロボットシミュレーションデータRDを読み取り装置で読み取ることや、ネットワーク回線を利用してロボットシミュレーションデータRDを受信することがあげられる。
【0018】
ロボットシミュレーションデータRDを取得したオフラインティーチングデータ自動変換装置5は、ロボットシミュレーションデータRDから制御対象の情報をマスタファイルrd2から抽出する。さらに、抽出した制御対象の情報から変換処理に使用するデータベースを決定し、ネットワークを経由して、該当するプログラミング言語変換DB6a,6bに接続する。
【0019】
例えば、図1のロボット1が制御対象である場合には、そのロボット1に適合するデータが格納されているプログラミング言語変換DB6aに接続する。
変換処理手段51は、ロボットシミュレーションデータRDのメインデータrd3の領域に記述されている命令(変換元命令とする)をファイル検索して、その変換元命令に対応付けて登録され、かつロボット1の制御用のデータとして処理可能な命令(変換先命令とする)を取得する。そして、取得した変換先命令に変換元命令を置き変え、つまり命令の変換を行う。すべての命令の変換が終了したら、変換後の命令からなるデータを、そのロボット1の動作制御のためのティーチングデータTD1として、ネットワークを通じて、あるいは記録媒体を介して、ロボット1のコントローラ1b(図1参照)に受け渡す。
【0020】
ここでの変換処理をさらに具体例をあげて説明する。
オフラインティーチングデータ自動変換装置5の変換処理手段51(図2参照)は、図4(a)に示すようにロボットシミュレーションデータRDに「JNTI****」(「JNTI」が命令であり、「****」は命令の引数である)という命令文がある場合には、命令「JNTI」でプログラミング言語変換DB6aを検索して、「JNTI=カクジク」という相関関係を取得し、「JNTI」という命令を、「カクジク」という命令に変換し、命令文「カクジク****」とする。このような変換作業は、ロボットシミュレーションデータRDの全ての命令を対象にして行われ、変換作業を終了したデータが、ロボット1の動作制御を行うことができるティーチングデータTD1になる。
【0021】
なお、前記のロボット1と異なるロボット2のティーチングデータTD2を作成する際には、ロボットシミュレーションデータRDで特定されるロボットの種類に応じて、そのコントローラ2bが使用する命令を変換先命令として格納したデータベース(図1のプログラミング言語変換DB6b)が選択され、データの変換処理が行われる。例えば、図4(b)に示すように、ロボットシミュレーションデータRDに「JNTI****」という命令文がある場合には、命令「JNTI」でプログラミング言語変換DB6bを検索して、「JNTI=MOVJ」という関係を取得し、「JNTI」という命令を、「MOVJ」という命令に変換し、命令文「MOVJ****」とする。ロボットシミュレーションデータRDの全ての命令の変換作業が終了したデータが、ロボット2の動作制御を行うことができるティーチングデータTD2になる。
【0022】
本実施形態のオフラインティーチングデータ自動変換装置5は、部材のデータのみを読み取るだけではなく、ロボット1,2を実際に生産ラインに配置した際の干渉などのシミュレーションに使用したロボット1,2のデータを取り込むようにし、ネットワークで接続されたデータベース内に記録されている情報を用いて、シミュレーション用のデータをロボット1,2ごとに定められているプログラミング言語に適合したデータに変換して出力することが可能になる。このため、作業者は3次元CAD装置7のプログラミング言語のみを習得していれば、ロボット製造メーカーごとに異なる複数のプログラミング言語を知らなくても自動的にロボット1,2のティーチングデータTD1,TD2を作成できる。
【0023】
また、3次元CAD装置7で干渉のシミュレーションを行う作業と、ロボット1やロボット2のティーチングデータの作成作業とを別々に行う場合に比べて、シミュレーションで作成するデータを有効に活用することができるので、作業効率を向上させることができる。さらに、この場合にティーチングデータを作成するために用いるデータは、他の要素との干渉がないように調整された後のデータであるので、ティーチングデータの作成後に干渉の有無をチェックする手間を省略できるという利点も有する。
【0024】
なお、本発明は、前記の実施形態に限定されずに広く応用することができる。オフラインティーチングデータ自動変換装置5の記憶装置にプログラミング言語変換DB6を記憶させておいても良い。
【0025】
また、ロボットシミュレーションデータRDの入力元と、変換後のティーチングデータTD1,TD2の出力先とを、ロボット1,2を特定して行うための表示画面をオフラインティーチングデータ自動変換装置5の表示装置に表示させても良い。その一例を図5に示す。この表示画面8は、変換元のデータであるロボットシミュレーションデータRDを選択する変換元選択領域81と、ティーチングデータTD1,TD2を作成するロボット1,2を選択するロボット選択領域82と、ティーチングデータTD1,TD2の出力先を特定する出力先選択領域83とを備える。変換元選択領域81は、ロボットシミュレーションデータRDが記憶されている記憶媒体やディレクトリを選択する領域81aと、ロボットシミュレーションデータRDのファイル名を選択する領域81bとを有する。ロボット選択領域82は、生産ラインを選択する領域82aと、工程を選択する領域82bと、ロボット1,2を選択する領域82cとを有し、複数の生産ラインや多工程の生産工場であってもロボット1,2を特定しやすくしている。出力先選択領域83は、変換して作成したティーチングデータTD1,TD2の記録媒体の名称や、他のコンピュータの名称、ディレクトリを表示させ、作業者が出力先を指定できるようになっている。この出力先選択領域83にティーチングデータTD1,TD2のファイル名を入力する領域を設けても良い。ちなみに、表示画面8は、変換処理の実行を指示するボタン84と、この画面を閉じて処理を終了させるボタン85とを備えている。このような表示画面を用いると、種類の異なる多数のロボットを使って生産ラインを構成する場合に、ロボットの動作制御の設定処理が容易になる。
【0026】
【発明の効果】
本発明によれば、設計支援装置で作成したロボットの動作を記述したデータをコンピュータに入力することにより、同じ内容を各ロボットの種類ごとのプログラミング言語で記述したティーチングデータを生成することが可能になる。これにより、種類の異なるロボットが複数ある場合であっても、ティーチングデータの作成が容易になり、作業効率を向上させることができる。
【図面の簡単な説明】
【図1】本発明の実施形態におけるティーチングデータの作成処理が行われるシステムの概略構成図である。
【図2】ティーチングデータの生成過程の一例を示す図である。
【図3】プログラミング言語変換データベースの一例を示す図である。
【図4】(a)、(b)データの変換処理を説明する図である。
【図5】作業者が操作する画面の一例を示す図である。
【符号の説明】
1 ロボット
2 ロボット
1b コントローラ
2b コントローラ
5 オフラインティーチングデータ自動変換装置
6 プログラミング言語変換データベース
7 3次元CAD(設計支援装置)
RD ロボットシミュレーションデータ
TD1 ティーチングデータ
TD2 ティーチングデータ
Claims (1)
- コンピュータを用いた設計支援装置に搭載されたプログラミング言語を使って作成されたデータであって、生産ラインに使用されるロボットの動作を記述した第一のデータを取得して、前記ロボットの制御用に使用されるプログラミング言語で作成された第二のデータであるティーチングデータを作成するにあたり、前記第一のデータを記述するために用いられるプログラミング言語の命令と、前記ティーチングデータを記述するために前記ロボットの種類ごとに用いられるプログラミング言語の命令とを対応付けて構築されたデータベースを、前記第一のデータに含まれる前記ロボットの種類を特定する情報と、前記第一のデータに記述されている命令とで検索して、前記ロボットの種類ごとに用いられるプログラミング言語の命令を取得し、前記第一のデータの命令を前記ティーチングデータを記述するプログラミング言語の命令に変換することを特徴とするロボットのティーチングデータの作成方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003025756A JP2004237364A (ja) | 2003-02-03 | 2003-02-03 | ロボットのティーチングデータの作成方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003025756A JP2004237364A (ja) | 2003-02-03 | 2003-02-03 | ロボットのティーチングデータの作成方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004237364A true JP2004237364A (ja) | 2004-08-26 |
Family
ID=32953960
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003025756A Pending JP2004237364A (ja) | 2003-02-03 | 2003-02-03 | ロボットのティーチングデータの作成方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004237364A (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2473129A (en) * | 2009-08-27 | 2011-03-02 | Honda Motor Co Ltd | Off-line robot teaching method |
| WO2013150597A1 (ja) * | 2012-04-02 | 2013-10-10 | 株式会社安川電機 | ロボットシステム及びロボット制御装置 |
| CN106660210A (zh) * | 2014-07-30 | 2017-05-10 | 川崎重工业株式会社 | 机器人控制程序产生方法及装置 |
| JP2018073272A (ja) * | 2016-11-02 | 2018-05-10 | ファナック株式会社 | 複数の機器に対して設定を行う設定装置及び設定システム |
| CN109227524A (zh) * | 2018-10-31 | 2019-01-18 | 天津泰华易而速机器人科技有限公司 | 一种无动力臂多关节仿形示教机器人及示教方法 |
| CN114464043A (zh) * | 2022-01-04 | 2022-05-10 | 大连斗牛科技有限公司 | 一种轨道车设计虚拟仿真体验系统 |
| CN114670189A (zh) * | 2020-12-24 | 2022-06-28 | 精工爱普生株式会社 | 存储介质、以及生成机器人的控制程序的方法及系统 |
| US20230173670A1 (en) * | 2021-12-07 | 2023-06-08 | Canon Kabushiki Kaisha | Information processing apparatus, system, information processing method, method of manufacturing products, and recording medium |
-
2003
- 2003-02-03 JP JP2003025756A patent/JP2004237364A/ja active Pending
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2473129B (en) * | 2009-08-27 | 2012-01-04 | Honda Motor Co Ltd | Robot off-line teaching method |
| GB2473129A (en) * | 2009-08-27 | 2011-03-02 | Honda Motor Co Ltd | Off-line robot teaching method |
| WO2013150597A1 (ja) * | 2012-04-02 | 2013-10-10 | 株式会社安川電機 | ロボットシステム及びロボット制御装置 |
| CN104245245A (zh) * | 2012-04-02 | 2014-12-24 | 株式会社安川电机 | 机器人系统及机器人控制装置 |
| JPWO2013150597A1 (ja) * | 2012-04-02 | 2015-12-14 | 株式会社安川電機 | ロボットシステム及びロボット制御装置 |
| US9662789B2 (en) | 2012-04-02 | 2017-05-30 | Kabushiki Kaisha Yaskawa Denki | Robot system and robot controller |
| US10747200B2 (en) | 2014-07-30 | 2020-08-18 | Kawasaki Jukogyo Kabushiki Kaisha | Robot control program generation method and apparatus |
| CN106660210A (zh) * | 2014-07-30 | 2017-05-10 | 川崎重工业株式会社 | 机器人控制程序产生方法及装置 |
| EP3175957A4 (en) * | 2014-07-30 | 2018-04-04 | Kawasaki Jukogyo Kabushiki Kaisha | Method and device for generating robot control program |
| JP2018073272A (ja) * | 2016-11-02 | 2018-05-10 | ファナック株式会社 | 複数の機器に対して設定を行う設定装置及び設定システム |
| US10549424B2 (en) | 2016-11-02 | 2020-02-04 | Fanuc Corporation | Setting device and setting system for configuring settings for a plurality of machines |
| CN109227524A (zh) * | 2018-10-31 | 2019-01-18 | 天津泰华易而速机器人科技有限公司 | 一种无动力臂多关节仿形示教机器人及示教方法 |
| CN114670189A (zh) * | 2020-12-24 | 2022-06-28 | 精工爱普生株式会社 | 存储介质、以及生成机器人的控制程序的方法及系统 |
| CN114670189B (zh) * | 2020-12-24 | 2024-01-12 | 精工爱普生株式会社 | 存储介质、以及生成机器人的控制程序的方法及系统 |
| US20230173670A1 (en) * | 2021-12-07 | 2023-06-08 | Canon Kabushiki Kaisha | Information processing apparatus, system, information processing method, method of manufacturing products, and recording medium |
| CN114464043A (zh) * | 2022-01-04 | 2022-05-10 | 大连斗牛科技有限公司 | 一种轨道车设计虚拟仿真体验系统 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12056476B2 (en) | Software defined manufacturing/assembly system | |
| EP3864480B1 (en) | Object marking to support tasks by autonomous machines | |
| CN106846468B (zh) | 一种基于ros系统的机械臂建模及运动规划实现方法 | |
| US20220156433A1 (en) | Industrial network communication emulation | |
| Pires et al. | Advances in robotics for additive/hybrid manufacturing: robot control, speech interface and path planning | |
| JP2001105359A (ja) | ロボットシステム用グラフィック表示装置 | |
| CN101092031A (zh) | 工业机器人离线编程系统 | |
| CN113836702B (zh) | 机器人示教编程方法及机器人示教编程装置 | |
| JP2023526962A (ja) | ロボットデモンストレーション学習用スキルテンプレート | |
| JP2010137298A (ja) | 複腕ロボットの作業プログラム作成方法 | |
| WO2018176025A1 (en) | System and method for engineering autonomous systems | |
| JP2023528249A (ja) | ロボット実証学習のためのスキルテンプレート配布 | |
| Wang et al. | Augmented reality enabled human–robot collaboration | |
| JP2023526211A (ja) | 分散型ロボット実証学習 | |
| JP2004237364A (ja) | ロボットのティーチングデータの作成方法 | |
| US20050256606A1 (en) | Method in the control of a machine tool cell | |
| JP6460692B2 (ja) | ロボットシステム、ロボットシステムの制御方法、教示装置、教示装置の制御方法、プログラム及び記録媒体 | |
| JPH10143221A (ja) | 機器制御プログラムの開発支援システムおよび開発支援方法 | |
| JP2022524385A (ja) | プロセス、システム、及び不揮発性記憶媒体 | |
| JP7501064B2 (ja) | シミュレーション装置、シミュレーション方法およびシミュレーションプログラム | |
| Hwang et al. | Interactive task planning through natural language | |
| WO2023171722A1 (ja) | プログラム生成装置、及びプログラム生成方法 | |
| Pang et al. | Systematic closed-loop modelling in IEC 61499 function blocks: A case study | |
| JP7276359B2 (ja) | 動作指令生成装置、機構制御システム、コンピュータプログラム、動作指令生成方法及び機構制御方法 | |
| EP4227044A1 (en) | Robot system and control method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Effective date: 20051129 Free format text: JAPANESE INTERMEDIATE CODE: A621 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060117 |
|
| A131 | Notification of reasons for refusal |
Effective date: 20070523 Free format text: JAPANESE INTERMEDIATE CODE: A131 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070618 |
|
| A02 | Decision of refusal |
Effective date: 20070926 Free format text: JAPANESE INTERMEDIATE CODE: A02 |