JP2004157456A - Camera and range-finding method of camera - Google Patents
Camera and range-finding method of camera Download PDFInfo
- Publication number
- JP2004157456A JP2004157456A JP2002325266A JP2002325266A JP2004157456A JP 2004157456 A JP2004157456 A JP 2004157456A JP 2002325266 A JP2002325266 A JP 2002325266A JP 2002325266 A JP2002325266 A JP 2002325266A JP 2004157456 A JP2004157456 A JP 2004157456A
- Authority
- JP
- Japan
- Prior art keywords
- distance
- photographing lens
- focusing
- camera
- contrast
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images
















Abstract
Description
【0001】
【発明の属する技術分野】
本発明は撮影レンズを介して、撮像素子(イメージャ)が得た被写体像を電子的に記録するいわゆるデジタルカメラのオートフォーカス技術の改良に関する。
【0002】
【従来の技術】
デジタルカメラのオートフォーカス(AF)は、古くより、撮影レンズのピント位置を変えながら撮像素子から得られる像のコントラストを判定してピント合わせを行うイメージャAFが一般的であった。しかしながら、この方式は、必ず撮影のタイミングで複数のピント位置に於ける画像データを取得する必要があるが、レリーズタイムラグが長くなる傾向がある。そのため、これを別の光学系による測距装置(外光AF)の併用によって対策しようとする技術があり、以下のように知られている(例えば、特許文献1、特許文献2及び特許文献3参照)。
【0003】
【特許文献1】
特開2001−141985号公報[0034]、図2
【0004】
【特許文献2】
特開2001−249267号公報[0039]〜[0041]、図1
【0005】
【特許文献3】
特開平11−23955号公報[0006]〜[0009]、図1
【0006】
【発明が解決しようとする課題】
上述したイメージャAFのメリットは、撮影レンズの停止位置に誤差があっても、それを含めてピント位置を制御するため、温度や湿度や姿勢差等によって設計とは異なるレンズ位置特性となっても、誤差をキャンセルしたフィードバック制御ができる点にある。
【0007】
しかしながら、上述したように、ピント合わせまでに時間がかかってしまうので、上述した特許文献1及び特許文献2に記載のカメラでは、焦点深度が深いシチュエーションの場合、先のレンズ位置誤差を無視して、外光AFの結果のみでピント制御(LD)を行っている。
【0008】
また、上述した特許文献3に記載のカメラでは、距離による切り替えが行われている。
【0009】
ところが、焦点深度が深くとも、より正確なピント合わせをしたいシーンもあれば、焦点深度が浅くとも、レリーズタイムラグをなくして撮影したいシーンもあり、距離によってだけで必ずしも切り替えが有効なわけではない。したがって、より正確に、シーンによってピント優先かタイムラグ優先かを切り替えることができれば、よりユーザが満足できるカメラを提供することができる。
【0010】
この発明は上記課題に鑑みてなされたものであり、シーンに応じて最適のピント合わせ方法を採用して、ピント合わせの精度が重要なシーンや、より高速性が求められるシーンでも、撮影者がピントの精度やタイムラグにが満足できる使い勝手の良いカメラ及びカメラの測距方法を提供することを目的とする。
【0011】
【課題を解決するための手段】
すなわち第1の発明は、撮影レンズを介して得られた被写体の像信号のコントラストに基づいて上記撮影レンズのピント合わせを行う第1のオートフォーカス方式と、上記撮影レンズとは異なる一対の光学系を有する測距装置の測距結果に従って上記撮影レンズのピント合わせを行う第2のオートフォーカス方式とを有するカメラに於いて、上記測距装置は、写真画面内の複数ポイントの測距が可能であり、上記複数の測距結果より、主要被写体とその他の被写体が、所定の距離範囲にあると判断した場合には、上記第2のオートフォーカス方式を優先したピント合わせを行う選択手段を具備することを特徴とする。
【0012】
また、第2の発明は、撮影レンズを介して得られた被写体の像信号のコントラストに基づいて上記撮影レンズのピント合わせを行う第1のオートフォーカス方式と、上記撮影レンズとは異なる一対の光学系を有する測距装置の測距結果に従って上記撮影レンズのピント合わせを行う第2のオートフォーカス方式とを有するカメラに於いて、上記測距装置は、写真画面内の複数ポイントの測距が可能であり、上記複数の測距結果の距離の分布に基づいて、上記第1のオートフォーカス方式と上記第2のオートフォーカス方式とを切り替えて測距を行う切り替え手段を具備することを特徴とする。
【0013】
更に、第3の発明は、撮影に先立って、撮影レンズ以外の光学系を利用して写真画面内の複数ポイントの測距を行い、主要被写体の距離と画面内位置を求める多点測距手段と、上記多点測距手段によって、上記主要被写体がその他の被写体と差異のない距離に存在すると判定された場合には、上記測距結果に従って上記撮影レンズの合焦制御を行い、上記主要被写体がその他の被写体と離れた距離にあると判定された場合には、上記撮影レンズによって得られた被写体像のコントラストに従って合焦制御を行う制御手段と、を具備することを特徴とする。
【0014】
第4の発明は、撮影レンズにズームレンズを有するカメラに於いて、上記撮影レンズとは異なる光学系によって、画面内の複数ポイントの距離を測定する多点測距手段と、上記撮影レンズを介して得られた撮像手段のコントラストによってピント合わせ位置を決定するコントラスト式ピント合わせ手段と、上記撮影レンズのズーム位置を検出するズーム位置検出手段と、上記ズーム位置と、上記多点測距結果に従った主要被写体と背景との距離の関係から、上記コントラスト式ピント合わせ手段を作動させるか否かを決定する決定手段と、を具備することを特徴とする。
【0015】
第5の発明は、撮影レンズを介して得られた被写体の像信号のコントラストに基づいて上記撮影レンズのピント合わせを行う第1のオートフォーカス方式と、上記撮影レンズとは異なる一対の光学系を有する測距装置の測距結果に従って上記撮影レンズのピント合わせを行う第2のオートフォーカス方式とを有するカメラに於いて、上記測距装置は写真画面内の複数ポイントの像信号に従って上記複数ポイントの測距が可能であり、更に、上記像信号の微分データを求める微分手段と、上記微分情報が所定のレベルより高い場合に、上記第2のオートフォーカス方式を優先したピント合わせを行うべく選択する選択手段と、を具備することを特徴とする。
【0016】
また、第6の発明は、撮影レンズを介して得られた被写体の像信号のコントラストに基づいて上記撮影レンズのピント合わせを行う第1のオートフォーカス方式と、上記撮影レンズとは異なる一対の光学系を有する測距装置の測距結果に従って上記撮影レンズのピント合わせを行う第2のオートフォーカス方式とを有するカメラに於いて、上記測距装置は写真画面内の複数ポイントの像信号に従って上記複数ポイントの測距が可能であり、上記写真画面内のコントラスト情報を検出し、このコントラストの大きさを判断する判断手段と、上記判断手段の結果に基づいて第1のオートフォーカス方式と第2のオートフォーカス方式とを切り替える切り替え手段と、を具備することを特徴とする。
【0017】
そして、第7の発明は、撮影レンズを介して得られた被写体の像信号のコントラストに基づいて第1のオートフォーカス方式で上記撮影レンズのピント合わせを行い、上記撮影レンズとは異なる一対の光学系を有する測距装置の測距結果に従って第2のオートフォーカス方式で上記撮影レンズのピント合わせを行うカメラの測距方法に於いて、上記測距装置は、写真画面内の複数ポイントの測距が可能であり、上記複数の測距結果より、主要被写体とその他の被写体が、所定の距離範囲にあると判断した場合には、上記第2のオートフォーカス方式を優先したピント合わせを行うように選択することを特徴とする。
【0018】
第8の発明は、撮影レンズを介して得られた被写体の像信号のコントラストに基づいて第1のオートフォーカス方式で上記撮影レンズのピント合わせを行い、上記撮影レンズとは異なる一対の光学系を有する測距装置の測距結果に従って第2のオートフォーカス方式で上記撮影レンズのピント合わせを行うカメラの測距方法に於いて、上記測距装置は、写真画面内の複数ポイントの測距が可能であり、上記複数の測距結果の距離の分布に基づいて、上記第1のオートフォーカス方式と上記第2のオートフォーカス方式とを切り替えて測距を行うステップを具備することを特徴とする。
【0019】
更に、第9の発明は、撮影に先立って、撮影レンズ以外の光学系を利用して写真画面内の複数ポイントの多点測距を行い、主要被写体の距離と画面内位置を求めるステップと、上記多点測距によって、上記主要被写体がその他の被写体と差異のない距離に存在すると判定された場合には、上記測距結果に従って上記撮影レンズの合焦制御を行い、上記主要被写体がその他の被写体と離れた距離にあると判定された場合には、上記撮影レンズによって得られた被写体像のコントラストに従って合焦制御を行うステップと、を具備することを特徴とする。
【0020】
第10の発明は、撮影レンズにズームレンズを有するカメラの測距方法に於いて、上記撮影レンズとは異なる光学系によって、画面内の複数ポイントの距離を測定する多点測距を行うステップと、上記撮影レンズを介して得られた撮影画像のコントラストによってピント合わせ位置を決定するステップと、上記撮影レンズのズーム位置を検出するステップと、上記ズーム位置と、上記多点測距の結果に従った主要被写体と背景との距離の関係から、上記ピント合わせ位置を決定するコントラスト式ピント合わせを作動させるか否かを決定するステップと、を具備することを特徴とする。
【0021】
第11の発明は、撮影レンズを介して得られた被写体の像信号のコントラストに基づいて第1のオートフォーカス方式で上記撮影レンズのピント合わせを行うステップと、上記撮影レンズとは異なる一対の光学系を有する測距装置の測距結果に従って第2のオートフォーカス方式で上記撮影レンズのピント合わせを行うステップとを有するカメラの測距方法に於いて、上記測距装置は写真画面内の複数ポイントの像信号に従って上記複数ポイントの測距が可能であり、更に、上記像信号の微分情報を求めるステップと、上記微分情報が所定のレベルより高い場合に、上記第3のオートフォーカス方式を優先したピント合わせを行うべく選択するステップと、を具備することを特徴とする。
【0022】
そして、第12の発明は、撮影レンズを介して得られた被写体の像信号のコントラストに基づいて第1のオートフォーカス方式で上記撮影レンズのピント合わせを行い、上記撮影レンズとは異なる一対の光学系を有する測距装置の測距結果に従って第2のオートフォーカス方式で上記撮影レンズのピント合わせを行うカメラの測距方法に於いて、上記測距装置は写真画面内の複数ポイントの像信号に従って上記複数ポイントの測距が可能であり、上記写真画面内のコントラスト情報を検出し、このコントラストの大きさを判断するステップと、上記判断の結果に基づいて第1のオートフォーカス方式と第2のオートフォーカス方式とを切り替えるステップと、を具備することを特徴とする。
【0023】
第1の発明によるカメラにあっては、撮影レンズを介して得られた被写体の像信号のコントラストに基づいて第1のオートフォーカス方式で上記撮影レンズのピント合わせが行われ、上記撮影レンズとは異なる一対の光学系を有する測距装置の測距結果に従って第2のオートフォーカス方式で上記撮影レンズのピント合わせが行われる。そして、上記測距装置では写真画面内の複数ポイントの測距が可能である。上記複数の測距結果より、主要被写体とその他の被写体が、所定の距離範囲にあると判断された場合には、上記第2のオートフォーカス方式が優先されたピント合わせが、選択手段によって行われる。
【0024】
第2の発明によるカメラにあっては、撮影レンズを介して得られた被写体の像信号のコントラストに基づいて第1のオートフォーカス方式で上記撮影レンズのピント合わせが行われ、上記撮影レンズとは異なる一対の光学系を有する測距装置の測距結果に従って第1のオートフォーカス方式で上記撮影レンズのピント合わせが行われる。そして、上記測距装置は、写真画面内の複数ポイントの測距が可能であり、上記複数の測距結果の距離の分布に基づいて、上記第1のオートフォーカス方式と上記第2のオートフォーカス方式とが切り替え手段で切り替えられて測距が行われる。
【0025】
第3の発明によるカメラにあっては、撮影に先立って、撮影レンズ以外の光学系を利用して写真画面内の複数ポイントの測距を行う多点測距手段によって主要被写体の距離と画面内位置が求められる。そして、上記多点測距手段によって、上記主要被写体がその他の被写体と差異のない距離に存在すると判定された場合には、制御手段によって上記測距結果に従って上記撮影レンズの合焦制御が行われる。一方、上記主要被写体がその他の被写体と離れた距離にあると判定された場合には、上記撮影レンズによって得られた被写体像のコントラストに従って制御手段で合焦制御が行われる。
【0026】
また、第4の発明によるカメラにあっては、撮影レンズにズームレンズを有しており、上記撮影レンズとは異なる光学系によって、画面内の複数ポイントの距離が多点測距手段により測定される。上記撮影レンズを介して得られた撮像手段のコントラストによって、コントラスト式ピント合わせ手段でピント合わせ位置が決定され、更に上記撮影レンズのズーム位置はズーム位置検出手段で検出される。そして、上記ズーム位置と、上記多点測距結果に従った主要被写体と背景との距離の関係から、上記コントラスト式ピント合わせ手段を作動させるか否かが決定手段で決定される。
【0027】
第5の発明によるカメラにあっては、撮影レンズを介して得られた被写体の像信号のコントラストに基づいて第1のオートフォーカス方式で上記撮影レンズのピント合わせが行われ、上記撮影レンズとは異なる一対の光学系を有する測距装置の測距結果に従って第2のオートフォーカス方式で上記撮影レンズのピント合わせが行われる。そして、上記測距装置は写真画面内の複数ポイントの像信号に従って上記複数ポイントの測距が可能であり、微分手段によって上記像信号の微分データが求められる。上記微分情報が所定のレベルより高い場合には、選択手段によって上記第2のオートフォーカス方式を優先したピント合わせが行われるべく選択される。
【0028】
第6の発明によるカメラにあっては、撮影レンズを介して得られた被写体の像信号のコントラストに基づいて第1のオートフォーカス方式で上記撮影レンズのピント合わせが行われ、上記撮影レンズとは異なる一対の光学系を有する測距装置の測距結果に従って第2のオートフォーカス方式で上記撮影レンズのピント合わせが行われる。そして、上記測距装置は写真画面内の複数ポイントの像信号に従って上記複数ポイントの測距が可能であり、上記写真画面内のコントラスト情報が検出されて、判断手段によりこのコントラストの大きさが判断される。更に、上記判断手段の結果に基づいて第1のオートフォーカス方式と第2のオートフォーカス方式とが切り替え手段によって切り替えられる。
【0029】
第7の発明によるカメラの測距方法にあっては、撮影レンズを介して得られた被写体の像信号のコントラストに基づいて第1のオートフォーカス方式で上記撮影レンズのピント合わせが行われ、上記撮影レンズとは異なる一対の光学系を有する測距装置の測距結果に従って第2のオートフォーカス方式で上記撮影レンズのピント合わせが行われる。そして、上記測距装置は、写真画面内の複数ポイントの測距が可能であり、上記複数の測距結果より、主要被写体とその他の被写体が、所定の距離範囲にあると判断された場合には、上記第2のオートフォーカス方式を優先したピント合わせが行われるように選択される。
【0030】
第8の発明によるカメラの測距方法にあっては、撮影レンズを介して得られた被写体の像信号のコントラストに基づいて第1のオートフォーカス方式で上記撮影レンズのピント合わせが行われ、上記撮影レンズとは異なる一対の光学系を有する測距装置の測距結果に従って第2のオートフォーカス方式で上記撮影レンズのピント合わせが行われる。そして、上記測距装置は、写真画面内の複数ポイントの測距が可能であり、上記複数の測距結果の距離の分布に基づいて、上記第1のオートフォーカス方式と上記第2のオートフォーカス方式とが切り替えられる。
【0031】
第9の発明によるカメラの測距方法にあっては、撮影に先立って、撮影レンズ以外の光学系を利用して写真画面内の複数ポイントの多点測距が行われ、主要被写体の距離と画面内位置が求められる。そして、上記多点測距によって、上記主要被写体がその他の被写体と差異のない距離に存在すると判定された場合には、上記測距結果に従って上記撮影レンズの合焦制御が行われる。一方、上記主要被写体がその他の被写体と離れた距離にあると判定された場合には、上記撮影レンズによって得られた被写体像のコントラストに従って合焦制御が行われる。
【0032】
第10の発明によるカメラの制御方法にあっては、撮影レンズにズームレンズを有しており、この撮影レンズとは異なる光学系によって、画面内の複数ポイントの距離が多点測距され、上記撮影レンズを介して得られた撮影画像のコントラストによってピント合わせ位置が決定される。更に、上記撮影レンズのズーム位置が検出されると、上記ズーム位置と、上記多点測距の結果に従った主要被写体と背景との距離の関係から、上記ピント合わせ位置を決定するコントラスト式ピント合わせを作動させるか否かが決定される。
【0033】
第11の発明によるカメラの測距方法にあっては、撮影レンズを介して得られた被写体の像信号のコントラストに基づいて第1のオートフォーカス方式で上記撮影レンズのピント合わせが行われ、上記撮影レンズとは異なる一対の光学系を有する測距装置の測距結果に従って第2のオートフォーカス方式で上記撮影レンズのピント合わせが行われる。上記測距装置は写真画面内の複数ポイントの像信号に従って上記複数ポイントの測距が可能であり、また、上記像信号の微分情報が求められる。そして、上記微分情報が所定のレベルより高い場合に、上記第3のオートフォーカス方式を優先したピント合わせが行われるべく選択される。
【0034】
更に、第12の発明によるカメラの測距方法にあっては、撮影レンズを介して得られた被写体の像信号のコントラストに基づいて第1のオートフォーカス方式で上記撮影レンズのピント合わせが行われ、上記撮影レンズとは異なる一対の光学系を有する測距装置の測距結果に従って第2のオートフォーカス方式で上記撮影レンズのピント合わせが行われる。上記測距装置は写真画面内の複数ポイントの像信号に従って上記複数ポイントの測距が可能であり、上記写真画面内のコントラスト情報が検出され、このコントラストの大きさが判断される。そして、上記判断の結果に基づいて第1のオートフォーカス方式と第2のオートフォーカス方式とが切り替えられる。
【0035】
この発明は、被写体の距離と、その他の被写体の距離の関係により上記優先度を切り替えるものである。
【0036】
【発明の実施の形態】
以下、添付の図面を参照してこの発明の実施の形態について説明する。
【0037】
先ず、図2を参照して、この発明の概要について説明する。
【0038】
図2(a)は主要被写体である人物が風景の中に存在するシーンの一例を示した図、図2(b)は主要被写体である人物が同図(a)のシーンよりもっと雑然とした状況に存在するシーンの一例を示した図、図2(c)は主要被写体が画面の端の方に存在するシーンの一例を示した図である。
【0039】
図2(a)に示されるシーンの場合、画面1に於いて、完全に被写体の距離が風景より分離されるので、撮影者が主題にしたいのは、この人物2aであることに相異ない。したがって、この人物2aに対しては十全なピント合わせ制御が必要であると考えられる。それ故、温度や湿度や姿勢差によって影響を受けないイメージャAFにて、ピント合わせが行われる。
【0040】
しかし、イメージャAFは、レンズを移動させながら画像のコントラストを判定するため、レンズの起動、停止に時間がかかり、タイムラグが長くなるという欠点があった。このようなタイプのピント合わせは、図2(b)に示されるようなシーンに於いては、必ずしも満足できるものではなかった。
【0041】
つまり、このようなシーンでは、撮影者は、1人の人物だけでなく他の人物や背景にも興味を持っていることは確実であり、人物2aのみならず、人物2bや背景2c等にもピントを合わせたいシーンであると考えられるからである。このような状況は、パーティや宴会等でよく発生するが、この場合の写真撮影は、目的と言うよりも楽しいひとときの思い出の記録としての価値が高く、短時間の間に済ませてしまいたいものである。また、こうしたシーンでは、背景近くにピントが合っても問題はなく、上述したようにレンズ制御(LD)に誤差があっても、それが人物に対し、少し遠距離側であれば気にならないことが多い。
【0042】
このような状況では、必要以上に人物に対し時間をかけてピント合わせを行うと、シャッタチャンスを逃してしまうことが多い。背景が静止している風景等であればまだ良いが、例えば、図2(b)に示されるシーンのように、複数の人物が存在しているシーン等では、時間がかかりすぎると全員のしぐさや表情が、撮影者の意図から外れてしまうことがある。
【0043】
したがって、図2(b)に示されるような状況では、この発明に於いては、時間を優先させたピント合わせを行うようにする。
【0044】
次に、図3を参照して、この発明で重要な役割を担う外光式測距装置の測距原理について説明する。
【0045】
図3(a)に於いて、被写体2より距離Lだけ離間した位置に、一対の受光レンズ3a及び3bが配置される。該受光レンズ3a及び3bは、主点間距離が基線長Bだけ離間して、被写体2の像を各々センサアレイ4a及び4b上に導く。こうして得られた被写体2からの光は、三角測距の原理によって、光軸を原点とする相対位置差xを持って結像する。このxより距離Lが求められる。
【0046】
図3(a)では、受光レンズ3aの光軸上の像が、センサアレイ4b上のxの位置に入射することが示されているが、受光レンズ3aの光軸からθだけシフトした位置を測距する場合は、受光レンズの焦点距離をfとすると、ftan θの位置の像信号を利用すれば、同様の考え方(L=Bf/x)で光軸からずれたポイントの距離が求められる。
【0047】
このように、センサアレイの並び方向に幾つかの測距ポイントを有することができるので、図3(b)に示されるように、画面内のいくつかのポイント5の距離データを得ることができる。このような機能を有する測距装置を、多点測距装置と称する。
【0048】
また、多点測距装置として、公知のアクティブ式のマルチ測距装置を利用してもよい。例えば、図4に示されるように、複数のLED4cが投光レンズ3cを介して投射され、その反射信号光が受光レンズ3bを介して光位置検出素子4dで受光されるようにして、その入射位置を調べても、同様のマルチ測距が可能である。
【0049】
次に、この発明の第1の実施の形態を説明する。
【0050】
図1は、この発明の第1の実施の形態に係るカメラの内部構成を示すブロック図である。
【0051】
図1に於いて、この発明の第1の実施の形態に係るデジタルカメラは、マイクロプロセッサ(CPU)11と、一対の受光レンズ12a及び12bと、一対のセンサアレイ13a及び13bと、測距部14と、撮影レンズ16と、撮像素子17と、アナログ/デジタル(A/D)変換部18と、画像処理部19と、ズーム検出部21と、記録媒体22と、光源23とを含んで構成される。
【0052】
上記CPU11は、このカメラ全体のシーケンスを制御する演算制御手段であり、選択手段及び制御手段の機能を含んでいる。このCPU11には、撮影シーケンスを開始させるためのスイッチ11aが接続されている。CPU11は、撮影者によるスイッチ11aのオン操作を判定して、一連の撮影シーケンスを開始させる。
【0053】
一対の受光レンズ12a、12bは、被写体10からの像を受光して一対のセンサアレイ13a、13bに結像させるものである。そして、一対のセンサアレイ13a、13bでは、結像された被写体10からの像を電気信号(以後、「像信号」と称する)に変換して測距部14に出力する。
【0054】
測距部14は、A/D変換部14aと測距演算部14bとを含んで構成される、いわゆる、パッシブ方式の測距手段である。測距部14内のA/D変換部14aは、上記センサアレイ13a、13bから入力されてきた像信号をデジタル信号に変換して、測距演算部14bに出力する。そして、測距演算部14bでは、このデジタル信号に基づいて、カメラから被写体10までの距離、すなわち、被写体距離を、上述した三角測距の原理により演算する。尚、上記測距部14は特許請求の範囲に記載の「測距装置」に相当する。
【0055】
そして、CPU11により、上述したようにして演算された被写体距離に基づいて、撮影レンズ16のピント合わせ制御が行われる。つまり、CPU11により、測距演算部14bで演算された被写体距離に基づいてレンズ駆動部(LD部)20が制御されて、撮影レンズ16のピント合わせが行われる。
【0056】
また、ズーム検出部21では、上記撮影レンズ16のズーム位置を検出するためのものズーム位置検出手段である。このズーム検出部21にて、レンズ駆動部20により撮影レンズ16がどれだけ光軸上を移動したか、すなわちズーム位置が検出される。これにより、CPU11にて、上記ズーム検出部21で得られたズーム位置と、上記測距部14からの像信号に従って、ピント合わせ制御が行われる。
【0057】
撮影レンズ16のピント合わせが終了した後は、露出動作が行われる。撮像素子17はCCD等で構成されており、撮影レンズ16を介して結像された被写体10からの像が電気的な像信号に変換されて、A/D変換部18に出力される。尚、撮像素子17は特許請求の範囲に記載の「撮像素子」に相当する。
【0058】
A/D変換部18では、撮像素子17からの像信号がデジタル信号に変換された後、画像処理部9に出力される。また、画像処理部19では、入力されてきたデジタル信号に基づいて、画像の色や階調の補正等が行われた後、画像信号の圧縮がなされる。そして、記録媒体22に圧縮された画像が記録されて、露出動作が完了する。
【0059】
尚、光源23は、ストロボ装置等で構成されている。この光源23からは、撮影シーンに応じて露出用や測距用の補助光等が被写体10に投射されるようになっている。
【0060】
ここで、受光レンズ12a、12bとセンサアレイ13a、13b、及び撮影レンズ16と撮像素子17の位置関係は、図5(a)に示されるような関係にある。
【0061】
つまり、センサアレイ13a、13bと撮像素子17とで、同一の被写体10の像が検出可能である。また、センサアレイ13a、13bの出力を被写体距離算出に用いる際に、同図に実線で示される位置に結像された被写体10の像の代わりに、異なる位置、例えば同図に破線で示される位置に結像された被写体の像が用いられることにより、図3(b)に示されるように、撮影画面内に於ける被写体2以外の被写体の距離も検出可能である。
【0062】
図5(b)は、この第1の実施の形態に係るカメラの外観斜視図である。
【0063】
図5(b)に於いて、カメラ30の上面には、上述したスイッチ11aを操作するためのレリーズ釦11bが設けられている。また、カメラ30の前面のほぼ中央部には、上述した撮影レンズ16が設けられている。そして、撮影レンズ16の上方には受光レンズ12a、12bが、図5(a)に示される位置関係で設けられている。更に、図5(b)に於いて、上記受光レンズ12a、12bの右側部には、光源23用の発光窓23aが設けられている。
【0064】
以上説明したような外光式のAFでは、一対の受光レンズ12a、12b及びセンサアレイ13a、13bが、人間の両眼のように用いられて三角測距の原理で被写体距離が検出され、この被写体距離に基づいて撮影レンズ16のピント合わせが行われる。
【0065】
一方で、撮影レンズ16を介して撮像素子出力を利用するAFは、イメージャAFと称される。このイメージャAFは、レンズ駆動部20によって撮影レンズ16の位置を変化させながら、撮像素子17に結像された被写体の像のコントラストを検出していき、コントラストが最も高くなった撮影レンズ16の位置を判定してピント位置とするものである。
【0066】
つまり、このイメージャAFは、上述した外光AFのように、被写体距離に基づいてピント位置を決定するものとは異なる原理に基づくピント合わせ制御である。
【0067】
このようなイメージャAFでは、撮影レンズ16の位置制御に誤差が生じていた場合であっても、小さな誤差であればその誤差を考慮に入れた状態でピント位置を検出することができる。しかしながら、図2(c)に示されるように、主要被写体である人物2aが撮影画面1内の中央部以外に存在している場合には、撮影レンズ16のピントを迅速に人物2aに合わせることが困難である。
【0068】
つまり、主要被写体を特定するために、人物2aと背景被写体の建物2dのそれぞれに対して、上述したようなコントラスト判定を行った後、何れの被写体が主要被写体としてふさわしいか、例えば、何れの被写体が手前側に存在するかを判定する必要があるからである。このとき、それぞれの被写体に対応するピント位置に於ける画像を一時取り込んでからコントラストを判定する過程が必要となるので、時間がかかってしまう。
【0069】
これに対し、外光AFでは、図5(a)に示されるセンサアレイ13a、13bからの像信号を検出して、受光レンズ12a、12bの視差に基づく被写体の像信号のずれを検出することにより、被写体距離を決定する。つまり、撮影レンズ16を駆動するのはピント位置が決定した後のみであるので、ピント合わせにかかる時間はイメージャAFに比べて短い。
【0070】
また、主要被写体以外の被写体の距離も、被写体距離演算に使用する被写体の像信号を切り換えるだけでよいので、主要被写体の位置によらず、図3(b)に示される領域5のような広範囲の領域に於ける被写体の距離分布が検出可能である。
【0071】
図6は、上述したようにして求められた距離分布の例を示した図である。
【0072】
この距離分布が求められれば、主要被写体が何処に存在しているかを高速で検出することができる。
【0073】
次に、図7のフローチャートを参照して、この発明の基本的な考え方を第1の実施の形態として説明する。
【0074】
先ず、ステップS1にて、外光測距装置によって画面内の複数ポイントが測距される。例えば、図2(b)に示されたようなシーンでは、図6に示されたような分布が得られるので、これによって最も近い距離が、ステップS2にて主要被写体距離Lとして選択される。
【0075】
次いで、ステップS3に於いて、最も近い距離を示すポイント(主要被写体位置)が、他のポイントの距離と比べて差異が大きいか否かが判定される。ここで、差異が小さいならばステップS4に移行し、例えば、図2(b)に示されるようなシーンでは、スナップ写真であるとしてスピードを優先したピント合わせが行われる。このようなシーンでは、人物がジャストピントとなること以上に、背景も含めた写りが問題となるからである。
【0076】
また、図2(b)のシーンの例で言えば、人物の手前にも被写体があり、それらも状況によっては、撮影者にとっては重要である。そこで、必ずしも人物のピントのみが重要であるわけではないとして、多少の誤差よりタイミングを優先してピント合わせが行われる。その後、ステップS9に移行して撮影が終了する。
【0077】
一方、上記ステップS3にて差異が大きい場合は、ステップS5に移行する。図2(a)に示されるようなシーンでは、主要被写体2aの距離が背景と大きく異なる。つまり、図2(b)に示されるシーンの場合とは異なって、撮影者の関心は背景にはなく、もっぱら人物にのみ集中していると考えられる。この場合は、この人物にピントがぴったりと合うことが良い写真の条件となるので、レンズ誤差を含めてジャストピントにできるイメージャAFのシーケンスが続けて実行される。
【0078】
但し、レンズ駆動の全域にわたってコントラスト検出が実行されると、大変な時間のロスになるので、ステップS5では、主要被写体距離Lに相当するレンズ位置の手前にレンズが駆動(LD)される。その後、ステップS6にてコントラスト検出が開始される。
【0079】
そして、ステップS7に於いて、コントラストが最大になったレンズ位置が検出される。ここで、まだ最大になっていない場合は、ステップS8に移行してレンズ位置が微調整されて、ジャストピントの位置をさがすようにする。
【0080】
こうして、コントラストが最大になる位置が見つかるまでは、上記ステップS6〜S8が繰り返される。そして、コントラスト最大の位置に達したならば、その位置にピントが合わせられ、ステップS9にて撮影が実行される。
【0081】
以上説明したように、第1の実施の形態によれば、図2(a)に示されるように、撮影者の関心が1つの被写体(ここでは人物)に絞り込まれているシーンに於いては、時間をかけてでも人物に対するピント合わせを行い、図2(b)に示されるように、パーティや宴会でのスナップのようなシーンでは、スピードを優先したピント合わせ制御を行うので、シャッタチャンスを逃すことがなくなる。
【0082】
図8は、この第1の実施の形態に於けるカメラの測距動作を説明するタイミングチャートである。
【0083】
先ず、外光式の測距装置で測距が行われ、その結果によってレンズ制御(LD)が行われる。図2(a)に示されるシーンでは、更にここからコントラスト検出が行われて、コントラストがピークになるレンズ位置が求められるため、レンズ制御とコントラスト検出が繰り返される(Δt期間)。
【0084】
しかしながら、図2(b)に示されるようなシーンでは、このコントラスト検出は行われない。したがって、Δtの分だけ短い時間で撮影に入ることができる。また、もしも、図2(b)に示されるような構図でも、人物にぴったりピントを合わせたい場合には、公知のフォーカスロック等の技術を使用して写真撮影を行えばよい。
【0085】
次に、この発明の第2の実施の形態について説明する。
【0086】
この第2の実施の形態では、上述した図7のフローチャートに撮影レンズのズーム位置を加味したもので、長い焦点距離のズームレンズを具備したカメラに有効な実施の形態となっている。
【0087】
つまり、長焦点のズームレンズでは、ピント合わせレンズの微小な誤差が大きな誤差となって写りに影響するので、こうした撮影シーンではイメージャAFが優先される。また、図2(b)に示されるようなシーンでは、背景や、回りの雰囲気を多く画面内に入れたいので、ズームレンズの広角側で撮影することが多いことが考慮され、このようにズーム位置と被写体位置が考慮されて、スナップ撮影のようなシャッタチャンスが優先された撮影シーンが判定されて、ピント合わせが行われるようにしている。
【0088】
ここで、図9のフローチャートを参照して、この発明の第2実施の形態によるカメラの測距動作について説明する。
【0089】
先ず、ステップS11では、図1に於いてズーム検出部21が用いられてズーム位置が判定される。次いで、ステップS12にて、外光測距によるマルチポイントの測距が行われる。これにより、ステップS13にて距離分布が得られ、続くステップS14にて主要被写体距離Lが判定される。
【0090】
但し、必ずしも上述した第1の実施の形態のように、最も近い距離を示す被写体を主要被写体とみなす必要はなく、所定距離優先やあまりにも近すぎる被写体は雑被写体として無視するような選択方法でも、この発明では応用可能である。
【0091】
こうして求められた各ポイントの距離の逆数のばらつきが求められる。このばらつきは標準偏差σ等で判定することができるので、ステップS15に於いて該標準偏差σが比較される。
【0092】
ここで、σが小さいと判定されたならば、ステップS16に移行して、ズーム位置がワイド側であるか否かが判定される。その結果、ズーム位置がワイド側であれば、ステップS17に移行して、イメージャAFを実施するフラグが0とされる。一方、上記ステップS15にて標準偏差σが小さくない、或いはステップS16にてズーム位置がワイド側ではないと判定された場合は、ステップS18に移行して、イメージャAFを実施するフラグが1とされる。
【0093】
次に、ステップS19では、上記ステップS14で求められた主要被写体距離Lより∞側(遠距離側)に、レンズ制御で考えられる誤差分だけずらしてピント合わせが行われて重要な背景が考慮される。そして、ステップS20に於いて、イメージャAFを行うフラグ(イメージャフラグ)が判定される。
【0094】
ここで、イメージャフラグが1でなければ、ステップS24へ移行してイメージャAFは行われずに、高速で撮影に入る。しかしながら、イメージャAF実施のフラグが1であれば、レンズ停止位置誤差まで考慮されたフィードバック制御が可能なイメージャAFのシーケンスに入る。
【0095】
すなわち、ステップS21にて、撮影レンズを介した像が利用されてコントラスト検出が開始される。次いで、ステップS22に於いて、像のコントラストが最大であると判定されなければ、ステップS23に移行してレンズが微小量移動された後、上記ステップS21へ移行する。つまり、像のコントラストが最大であると判定されるまで、ステップS20〜S23にてコントラスト検出が繰り返される。
【0096】
こうして得られた像のコントラストが最大となった点で、レンズ駆動(LD)が停止されて、ステップS24にて撮影が実行される。
【0097】
以上説明したように、第2の実施の形態によれば、撮影レンズのズーム位置を加味し、ズーム位置がワイド側であれば、スナップ撮影である可能性が高いとして、スピードを優先したピント合わせを行う。しかし、主要被写体が背景から離れていたり望遠状態での撮影時には、ピント精度を重視した撮影を行う。
【0098】
このように、第2の実施の形態によれば、ズーム位置を加味し、自動的に撮影状況を判定し、最適のピント合わせ方法が選択できる使い勝手のよいカメラを提供することが可能である。
【0099】
また、上述した図9のフローチャートでは、各被写体の距離のばらつきを、標準偏差を用いて判定したが、図7のフローチャートに於けるステップS3の主要被写体距離と他の距離の差を求める判定のステップを、図10のようなアルゴリズムに変更してもよい。ここでは、判定の方法にズーム情報を加味した例を示す。
【0100】
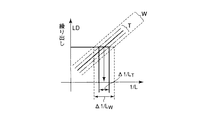
一般に、ピント合わせの繰り出し量と距離の逆数1/Lは、図11に示されるように、比例の関係となる。しかしながら、ズームレンズの焦点距離が望遠(テレ)の場合と、広角(ワイド)の場合では、焦点深度の関係で、同図のように同じ繰り出しLDの時に、カバーできる距離範囲が異なる。つまり、テレ(T)時はΔ1/LT の幅しかピントをカバーできないが、ワイド(W)時は、より広いΔ1/LW の幅をカバーすることができる。
【0101】
このような関係を考慮すると、図10のフローチャートに於いてステップS33の切り替えが必要となる。
【0102】
ステップS31では、マルチ測距で求められた全ポイントの距離の逆数の平均値を1/LAVとして計算される。次いで、ステップS32にて、上記平均値1/LAVと主要被写体距離の逆数1/Lとの差の絶対値がΔ1/Lとして求められる。この両者の差が大きければ、主要被写体は背景から離れていることになり、図2(a)に示されるようなシーンであることがわかる。一方、上記差が小さければ、主要被写体とその他の被写体が近接していることがわかる。つまり、図2(b)に示されるようなシーンであることがわかる。しかし、ワイドならば、被写体深度が深いため、それほど近接していなくとも、主要被写体、背景共にピント合わせができる。
【0103】
このような関係を考慮して、ステップS33に於いて分岐判断が行われる。すなわち、ズーム位置がテレ(T)であるか否かが判断される。ここで、ズーム位置がテレである場合はステップS34に移行し、そうでない場合はステップS35に移行する。
【0104】
そして、ステップS34では、上記ステップS32で得られた結果のΔ1/Lと所定の値Δ1/LT とが比較される。その結果、Δ1/Lの方が大きければステップS36へ移行し、Δ1/Lの方が小さければステップS37へ移行する。
【0105】
同様に、ステップS35では、上記ステップS32で得られた結果のΔ1/Lと所定の値Δ1/LW とが比較される。その結果、Δ1/Lの方が大きければステップS36へ移行し、Δ1/Lの方が小さければステップS37へ移行する。
【0106】
ステップS36では距離の差が大きいと判定され、ステップS37では距離の差が小さいと判定される。このような判定結果によって、図7のフローチャートに於けるステップS3の分岐判断を行えば、図2(a)または(b)のシチュエーションが判別でき、イメージャAFまたは外光AFの決定ができる。
【0107】
また、図7のフローチャートに於けるステップS3の主要被写体距離と他の距離の差を求める判定のステップに代えて、図12のフローチャートに示されるような判断にて、所定の距離範囲に含まれる被写体の数によって行ってもよい。
【0108】
つまり、先ずステップS41に於いて、ズーム位置がテレ(T)であるか否かが判断される。ここで、ズーム位置がテレである場合はステップS42に移行し、そうでない場合はステップS43に移行する。
【0109】
ステップS42では、主要被写体距離の逆数1/Lに対し、切り替えられる距離の逆数Δ1/LT の範囲に含まれる測距ポイントの数がnとされる。同様に、ステップS43では、主要被写体距離の逆数1/Lに対し、切り替えられる距離の逆数Δ1/LW の範囲に含まれる測距ポイントの数がnとされる。
【0110】
そして、ステップS44に於いて、マルチ測距の全測距ポイントのうち、上記ステップS42またはステップS43で得られたnが、50%より大きいか否かが判定される。ここで、50%より大きければ、ステップS45に移行して距離の差は小さいと判定される。一方、50%以下であった場合は、ステップS46に移行して、距離の差が大きいと判定される。
【0111】
この結果によって、シーン判定を行うようにしてもよい。
【0112】
以上、説明したように、簡単な計算や比較を用いた判定方法によって、主要被写体とその他の被写体の距離の関係が簡単に求められるので、高速でシーンを判定して、スピード優先またはピント優先のオートフォーカス方式を的確に切り替えることができ、シャッタチャンスを逃すことのないAFカメラを提供することができる。
【0113】
次に、この発明の第3の実施の形態を説明する。
【0114】
上述した実施の形態では、単に距離の分布のみによって撮影シーンを判定したが、これに限られるものではない。例えば、図2(c)に示されるように、画面1の端の方に主要被写体2aが存在する場合には、背景も重要な被写体であると考えられ、背景の距離が遠くとも、外光AF優先のAFに切り替えるようにしてもよい。このような応用をする場合は、図7のフローチャートに於いて、ステップS3とS5の間に、被写体の位置を判定する分岐を挿入し、主要被写体が端ならばステップS4に分岐するように設計すればよい。
【0115】
また、距離の分布や被写体の位置に加え、更に画面の像信号の状態によって、撮影シーンを判定するようにしてもよい。
【0116】
つまり、図2(a)と図2(b)のシーンでは、外光AFのセンサアレイで得られる像データは、各々図13と図14(a)に示されるようになる。つまり、図2(a)では背景は単調な陰影しかなく、図2(b)では、いろいろな被写体が存在するため、種々の陰影が存在する。このような像データの場合、激しく起伏する特徴があり、この特徴を判別するには隣接するデータの量を計算し、いわゆる微分データにすれば、変化がある所に大きなデータが生じ、図14(b)に示されるようなグラフのデータが得られる。
【0117】
図14(b)に示されるように、この微分データが所定の値を越える数を調べることによって、画面内がシンプルか雑然としているかが判定可能である。
【0118】
図15は、外光測距等に得られる像データを利用して、撮影シーンを判定して、外光AFとイメージャAFを切り替えるようにした、カメラの測距動作を説明するフローチャートである。
【0119】
すなわち、先ずステップS51にて、外光AF用センサで像信号が検出される。次いで、ステップS52にて、上記ステップS51の検出結果が用いられて、多点測距が行われる。そして、ステップS53では、上記ステップS52の結果より、最も近距離を示すデータが主要被写体距離とされる。
【0120】
ステップS54では、上記ステップS53で得られた距離野ポイントが主要被写体であるとされる。続くステップS55では、この第3の実施の形態の特徴たる微分値算出が行われる。
【0121】
次に、ステップS56に於いて、上述したように、所定量を越えるポイント数が調べられ、その数が所定の値n0 と比較される。その結果、所定の値n0 より少なければステップS57へ移行し、そうでなければステップS61へ移行する。
【0122】
ステップS57では、主要被写体距離Lに相当するレンズ位置の手前に撮影レンズが駆動される。その後、ステップS58にてコントラスト検出が開始される。そして、ステップS59に於いて、コントラストが最大になったレンズ位置が検出される。ここで、まだ最大になっていない場合は、ステップS60に移行してレンズ位置が微調整されて、ジャストピントの位置を探すようにする。
【0123】
こうして、コントラストが最大になる位置が見つかるまでは、上記ステップS58〜S60が繰り返される。そして、コントラスト最大の位置に達したならば、その位置にピントが合わせられ、ステップS62にて撮影が実行される。
【0124】
また、ステップS61では、外光による測距で、距離Lにピント合わせが実行される。その後、ステップS62に移行して撮影が実行される。
【0125】
すなわち、上記ステップS57以降のイメージャAF、またはステップS61以降の外光AFによるピント合わせが切り替えられている。つまり、微分時ピークが多い方が雑然としたシーンであるとして、いろいろな被写体が存在して、それらも重要な被写体だと考えている。逆にピーク数が少ないシーンでは、主要被写体が最重要としてピント優先のAFとしている。
【0126】
以上説明したように、この第3の実施の形態によれば、画面内の像分布の状態を利用してシーン判別を行うので、状況に最適なAF方式を選択することができる。
【0127】
ところで、被写体状態のコントラスト変化は、外光測距のセンサアレイや撮像素子出力だけでなく、カメラの露出合わせ用の測光用センサを用いても判定が可能である。
【0128】
多くのデジタルカメラでは、CCDを用いて露出制御も行っているが、より低輝度まで瞬時に測光できる測光センサを搭載した、図16に示されるようなカメラもある。
【0129】
図16は、この発明の第4の実施の形態に係るカメラの構成を示した概略断面図である。
【0130】
図16に於いて、このカメラは、カメラ本体30の前方に撮影レンズ31が取付けられている。この撮影レンズ31より後方の光軸上にはハーフミラー32が設けられている。
【0131】
このハーフミラー32の後方には撮像素子であるCCD39が配置され、一方ハーフミラー32の上方にはスクリーン33及びペンタプリズム34が配置されている。これにより、撮影レンズ31より入射された被写体像は、ハーフミラー32で反射されてスクリーン33上に投影され、更にペンタプリズム34を介して撮影者の眼35で観察できるようになっている。
【0132】
上記スクリーン33とペンタプリズム34の間には、外光用光学系37が設けられている。また、ペンタプリズム34を介して、被写体像をモニタできる位置に測光センサ38が配置されている。この測光センサ38は分割されていて、例えば、図17に示されるような画面40内の複数のポイントを測光することができるようになっている。
【0133】
このような構成の測光センサを用いれば、CCDほどの分解能はなくとも、画面全体の輝度分布を測定することが可能である。
【0134】
この発明は、このような測光センサを用いてのコントラスト判定、それによるAF方式の切り替えに対しても応用可能である。
【0135】
【発明の効果】
以上説明したように、この発明によれば、シーンに応じて、最適のピント合わせ方法を採用するので、ピント合わせの精度が重要なシーンでは高精度化にて、より高速性が求められるシーンではタイムラグの少ない方式でピント合わせを行い、撮影者が満足できる使い勝手の良いカメラ及びカメラの測距方法を提供することができる。
【図面の簡単な説明】
【図1】この発明の第1の実施の形態に係るカメラの内部構成を示すブロック図である。
【図2】(a)は主要被写体である人物が風景の中に存在するシーンの一例を示した図、(b)は主要被写体である人物が図(a)のシーンよりもっと雑然とした状況に存在するシーンの一例を示した図、(c)は主要被写体が画面の端の方に存在するシーンの一例を示した図である。
【図3】この発明で重要な役割を担う外光式測距装置の測距原理について説明する図である。
【図4】アクティブ式のマルチ測距装置について説明する図である。
【図5】(a)は受光レンズ12a、12bとセンサアレイ13a、13b、及び撮影レンズ16と撮像素子17の位置関係を示した図、(b)は第1の実施の形態に係るカメラの外観斜視図である。
【図6】距離分布の例を示した図である。
【図7】この発明の第1の実施の形態によるカメラの測距動作を説明するフローチャートである。
【図8】第1の実施の形態に於けるカメラの測距動作を説明するタイミングチャートである。
【図9】この発明の第2実施の形態によるカメラの測距動作について説明するフローチャートである。
【図10】図7のフローチャートに於けるステップS3の主要被写体距離と他の距離の差を求める判定のステップを変更した第1の例を説明するフローチャートである。
【図11】ズームレンズの焦点距離が望遠(テレ)の場合と広角(ワイド)の場合に於ける、ピント合わせの繰り出し量と距離の逆数1/Lとの関係を表した図である。
【図12】図7のフローチャートに於けるステップS3の主要被写体距離と他の距離の差を求める判定のステップを変更した第2の例を説明するフローチャートである。
【図13】図2(a)のシーンに於ける外光AFのセンサアレイで得られる像データの特性を示した図である。
【図14】(a)は図2(b)のシーンに於ける外光AFのセンサアレイで得られる像データの特性を示した図、(b)は(a)の像データの微分データの特性を示した図である。
【図15】この発明の第3の実施の形態に係るカメラの測距動作を説明するフローチャートである。
【図16】この発明の第4の実施の形態に係るカメラの構成を示した概略断面図である。
【図17】図16の測光センサ38の画面40の例を示した図である。
【符号の説明】
1 画面、
1a エリア、
2、10 被写体、
2a、2b 人物、
2c 背景、
3a、3b、12a、12b 受光レンズ、
4a、4b、13a、13b センサアレイ、
11 CPU、
11a スイッチ、
14 測距部、
14a A/D変換部、
14b 測距演算部、
16 撮影レンズ、
17 撮像素子、
18 アナログ/デジタル(A/D)変換部、
19 画像処理部、
21 ズーム検出部、
22 記録媒体、
23 光源。[0001]
TECHNICAL FIELD OF THE INVENTION
The present invention relates to an improvement in a so-called digital camera autofocus technique for electronically recording a subject image obtained by an imaging device (imager) via a photographing lens.
[0002]
[Prior art]
2. Description of the Related Art Autofocus (AF) of a digital camera has long been generally an imager AF that determines the contrast of an image obtained from an image sensor while changing the focus position of a photographing lens to perform focusing. However, in this method, it is necessary to always acquire image data at a plurality of focus positions at the timing of shooting, but the release time lag tends to be long. Therefore, there is a technique that attempts to cope with this by using a distance measuring device (external light AF) using another optical system, and is known as follows (for example,
[0003]
[Patent Document 1]
JP-A-2001-141985 [0034], FIG.
[0004]
[Patent Document 2]
JP-A-2001-249267 [0039] to [0041], FIG.
[0005]
[Patent Document 3]
JP-A-11-23955 [0006] to [0009], FIG.
[0006]
[Problems to be solved by the invention]
The advantage of the above-mentioned imager AF is that even if there is an error in the stop position of the taking lens, the focus position is controlled including the error, so that even if the lens position characteristic differs from the design due to temperature, humidity, posture difference, etc. That is, feedback control in which an error is canceled can be performed.
[0007]
However, as described above, since it takes time until focusing, the cameras described in
[0008]
In the camera described in
[0009]
However, even if the depth of focus is deep, there are some scenes where more accurate focusing is desired, and even if the depth of focus is shallow, there are scenes where it is desired to eliminate the release time lag, and switching is not always effective depending on the distance alone. Therefore, if it is possible to more accurately switch between focus priority and time lag priority depending on the scene, it is possible to provide a camera that satisfies the user more.
[0010]
The present invention has been made in view of the above-described problems, and employs an optimal focusing method according to a scene, so that a photographer can shoot even a scene in which focusing accuracy is important or a scene in which higher speed is required. It is an object of the present invention to provide an easy-to-use camera and a camera ranging method that can satisfy focus accuracy and time lag.
[0011]
[Means for Solving the Problems]
That is, a first aspect of the present invention provides a first auto-focus method for focusing the photographing lens based on a contrast of an image signal of a subject obtained via the photographing lens, and a pair of optical systems different from the photographing lens. A camera having a second auto-focus method for focusing the photographing lens in accordance with the distance measurement result of the distance measuring device having the above-mentioned distance measuring device. If there is a plurality of distance measurement results, and if it is determined that the main subject and the other subjects are within a predetermined distance range, there is provided a selection unit that performs focusing with priority given to the second autofocus method. It is characterized by the following.
[0012]
According to a second aspect of the present invention, there is provided a first auto-focus method for focusing the photographing lens based on a contrast of an image signal of a subject obtained via the photographing lens, and a pair of optical systems different from the photographing lens. A camera having a second auto-focus method for focusing the photographing lens in accordance with the distance measurement result of a distance measuring device having a system, wherein the distance measuring device is capable of measuring a plurality of points in a photographic screen. And a switching means for performing distance measurement by switching between the first autofocus method and the second autofocus method based on the distribution of distances of the plurality of distance measurement results. .
[0013]
Further, the third invention is a multi-point distance measuring means for measuring a distance of a plurality of points in a photographic screen using an optical system other than a photographing lens and obtaining a distance of a main subject and a position in the screen prior to photographing. And when the multi-point distance measuring means determines that the main subject exists at a distance that is not different from other subjects, performs focusing control of the photographing lens according to the distance measurement result, and If it is determined that the object is located at a distance from another object, control means for performing focusing control according to the contrast of the object image obtained by the photographing lens is provided.
[0014]
According to a fourth aspect of the present invention, in a camera having a zoom lens as a photographing lens, a multi-point distance measuring means for measuring a distance of a plurality of points on a screen by an optical system different from the photographing lens, A contrast-type focusing unit that determines a focusing position based on the contrast of the imaging unit obtained in the above-described manner, a zoom position detecting unit that detects a zoom position of the photographing lens, the zoom position, and the multipoint ranging result. Determination means for determining whether to activate the contrast-type focusing means based on the relationship between the distance between the main subject and the background.
[0015]
According to a fifth aspect of the present invention, there is provided a first auto-focus method for focusing the photographing lens based on a contrast of an image signal of a subject obtained via the photographing lens, and a pair of optical systems different from the photographing lens. A camera having a second auto-focus method for focusing the photographing lens in accordance with the distance measurement result of the distance measuring device. Distance measurement is possible, and further, a differentiating means for obtaining differential data of the image signal, and when the differential information is higher than a predetermined level, selecting to perform focusing with priority given to the second autofocus method. And selecting means.
[0016]
According to a sixth aspect of the present invention, there is provided a first auto-focus system for focusing the photographing lens based on a contrast of an image signal of a subject obtained through the photographing lens, and a pair of optical systems different from the photographing lens. And a second auto-focus system for focusing the photographing lens in accordance with the distance measurement result of the distance measuring device having the system. Point measuring is possible, detecting means for detecting contrast information in the picture screen, and judging the magnitude of the contrast. A first auto-focus method and a second Switching means for switching between the autofocus method and the automatic focusing method.
[0017]
According to a seventh aspect of the present invention, the photographic lens is focused by a first autofocus method based on a contrast of an image signal of a subject obtained via the photographic lens, and a pair of optical systems different from the photographic lens is used. A distance measuring apparatus that focuses the photographing lens in a second auto-focusing method according to a distance measurement result of a distance measuring apparatus having a system, wherein the distance measuring apparatus measures a distance of a plurality of points in a photographic screen. When it is determined from the plurality of distance measurement results that the main subject and the other subjects are within a predetermined distance range, focusing is performed with priority given to the second autofocus method. It is characterized by selecting.
[0018]
According to an eighth aspect of the present invention, the photographic lens is focused by a first auto-focus method based on the contrast of an image signal of a subject obtained via the photographic lens, and a pair of optical systems different from the photographic lens are used. A distance measuring method for a camera that focuses the photographing lens by a second auto-focus method according to the distance measurement result of the distance measuring device, wherein the distance measuring device is capable of measuring a plurality of points in a photographic screen. And a step of performing distance measurement by switching between the first autofocus method and the second autofocus method based on the distribution of distances as a result of the plurality of distance measurements.
[0019]
Further, the ninth invention performs a multi-point ranging of a plurality of points in a photographic screen using an optical system other than a photographing lens to obtain a distance of a main subject and a position in the screen prior to photographing; When it is determined by the multi-point distance measurement that the main subject exists at a distance that is not different from other subjects, focus control of the photographing lens is performed in accordance with the distance measurement result, and the main subject is determined to be in another position. Performing a focus control according to the contrast of the subject image obtained by the photographing lens when it is determined that the subject is distant from the subject.
[0020]
According to a tenth aspect of the present invention, there is provided a distance measuring method for a camera having a zoom lens as a photographing lens, wherein multi-point distance measuring for measuring distances of a plurality of points in a screen by an optical system different from the photographing lens is provided. Determining the focus position based on the contrast of a captured image obtained through the photographing lens, detecting the zoom position of the photographing lens, and performing the zoom position and the multipoint ranging. Determining whether to activate contrast-type focusing for determining the focusing position based on the relationship between the distance between the main subject and the background.
[0021]
According to an eleventh aspect of the present invention, a step of focusing the photographing lens by a first autofocus method based on a contrast of an image signal of a subject obtained via the photographing lens, and a pair of optical systems different from the photographing lens Focusing the photographing lens by a second auto-focusing method according to the distance measurement result of the distance measuring device having a system. And the step of obtaining differential information of the image signal, and when the differential information is higher than a predetermined level, priority is given to the third autofocus method. Selecting to perform focusing.
[0022]
According to a twelfth aspect, the photographic lens is focused by a first autofocus method based on a contrast of an image signal of a subject obtained via the photographic lens, and a pair of optical systems different from the photographic lens is used. In a camera distance measuring method for focusing the photographing lens by a second auto-focusing method according to a distance measuring result of a distance measuring device having a system, the distance measuring device operates in accordance with image signals of a plurality of points in a photographic screen. Detecting the distance information of the plurality of points, detecting contrast information in the picture screen, and determining the magnitude of the contrast; and a first autofocus method and a second autofocus method based on a result of the determination. And a step of switching between an auto-focus method and an auto-focus method.
[0023]
In the camera according to the first aspect of the invention, the focusing of the photographing lens is performed by the first autofocus method based on the contrast of the image signal of the subject obtained via the photographing lens. The focusing of the photographic lens is performed by the second autofocus method according to the distance measurement result of the distance measurement device having a pair of different optical systems. The distance measuring device can measure a distance at a plurality of points in a picture screen. When it is determined from the plurality of distance measurement results that the main subject and the other subjects are within a predetermined distance range, the focusing is performed by the selection unit with priority given to the second autofocus method. .
[0024]
In the camera according to the second aspect of the invention, the focusing of the photographing lens is performed by the first autofocus method based on the contrast of the image signal of the subject obtained through the photographing lens. The focusing of the photographing lens is performed by the first autofocus method according to the distance measurement result of the distance measurement device having a pair of different optical systems. The distance measuring device is capable of measuring a distance at a plurality of points in a photograph screen, and based on a distribution of distances as a result of the plurality of distance measurements, the first autofocus method and the second autofocus method. The method is switched by the switching means, and the distance measurement is performed.
[0025]
In the camera according to the third aspect of the present invention, prior to photographing, the distance between the main subject and the image on the screen is measured by multi-point distance measuring means for measuring the distance of a plurality of points in the photographic screen using an optical system other than the photographing lens. A position is required. If the multi-point distance measuring means determines that the main subject is present at a distance that is not different from other objects, the control means performs focusing control of the photographing lens according to the distance measurement result. . On the other hand, when it is determined that the main subject is located at a distance from other subjects, focusing control is performed by the control unit in accordance with the contrast of the subject image obtained by the photographing lens.
[0026]
Also, in the camera according to the fourth aspect of the invention, the photographing lens has a zoom lens, and the distance of a plurality of points on the screen is measured by the multipoint distance measuring means by an optical system different from the photographing lens. You. The focus position is determined by the contrast-type focusing means based on the contrast of the imaging means obtained through the photographing lens, and the zoom position of the photographing lens is detected by the zoom position detecting means. Then, from the relationship between the zoom position and the distance between the main subject and the background based on the result of the multi-point ranging, the determination unit determines whether to activate the contrast-type focusing unit.
[0027]
In the camera according to the fifth aspect of the invention, the focusing of the photographing lens is performed by the first autofocus method based on the contrast of the image signal of the subject obtained through the photographing lens. The focusing of the photographic lens is performed by the second autofocus method according to the distance measurement result of the distance measurement device having a pair of different optical systems. The distance measuring device is capable of measuring the distances of the plurality of points according to the image signals of the plurality of points in the photographic screen. Differentiating means obtains differential data of the image signals. When the differential information is higher than a predetermined level, the selection means selects the second autofocus method so that focusing is performed with priority.
[0028]
In the camera according to the sixth aspect, the focusing of the photographing lens is performed by the first autofocus method based on the contrast of the image signal of the subject obtained through the photographing lens. The focusing of the photographic lens is performed by the second autofocus method according to the distance measurement result of the distance measurement device having a pair of different optical systems. The distance measuring device is capable of measuring the distances of the plurality of points according to the image signals of the plurality of points in the photographic screen. The contrast information in the photographic screen is detected, and the magnitude of the contrast is determined by the determining means. Is done. Further, the switching means switches between the first autofocus method and the second autofocus method based on the result of the determination means.
[0029]
In the distance measuring method for a camera according to a seventh aspect of the present invention, focusing of the photographing lens is performed by a first autofocus method based on a contrast of an image signal of a subject obtained through the photographing lens. According to the distance measurement result of a distance measuring device having a pair of optical systems different from the photographing lens, the photographing lens is focused by the second autofocus method. The distance measuring device is capable of measuring a distance at a plurality of points in a photograph screen, and determines that a main subject and another subject are within a predetermined distance range based on the plurality of distance measurement results. Is selected so that focusing with priority given to the second autofocus method is performed.
[0030]
In the distance measuring method for a camera according to an eighth aspect of the present invention, focusing of the photographing lens is performed by a first autofocus method based on a contrast of an image signal of a subject obtained through the photographing lens. According to the distance measurement result of a distance measuring device having a pair of optical systems different from the photographing lens, the photographing lens is focused by the second autofocus method. The distance measuring device is capable of measuring a distance at a plurality of points in a photograph screen, and based on a distribution of distances as a result of the plurality of distance measurements, the first autofocus method and the second autofocus method. The system is switched.
[0031]
In the distance measurement method for a camera according to the ninth aspect, prior to photographing, multi-point distance measurement of a plurality of points in a photographic screen is performed using an optical system other than a photographing lens, and the distance between a main subject and the distance is measured. The position in the screen is required. If it is determined by the multi-point distance measurement that the main subject exists at a distance that is not different from other subjects, the focusing control of the photographing lens is performed according to the distance measurement result. On the other hand, when it is determined that the main subject is at a distance from other subjects, focusing control is performed according to the contrast of the subject image obtained by the photographing lens.
[0032]
In the camera control method according to the tenth aspect of the present invention, the photographing lens has a zoom lens, and the distance of a plurality of points on the screen is measured at multiple points by an optical system different from the photographing lens. The focusing position is determined based on the contrast of a captured image obtained through the imaging lens. Further, when the zoom position of the photographing lens is detected, a contrast-type focus for determining the focus position is determined from the relationship between the zoom position and the distance between the main subject and the background according to the result of the multipoint ranging. It is determined whether to perform the alignment.
[0033]
In the distance measuring method for a camera according to the eleventh aspect, focusing of the photographing lens is performed by a first auto-focus method based on a contrast of an image signal of a subject obtained through the photographing lens. According to the distance measurement result of a distance measuring device having a pair of optical systems different from the photographing lens, the photographing lens is focused by the second autofocus method. The distance measuring device is capable of measuring the distances of the plurality of points according to the image signals of the plurality of points in the photographic screen, and obtains differential information of the image signals. Then, when the differential information is higher than a predetermined level, it is selected to perform focusing with priority given to the third autofocus method.
[0034]
Further, in the camera distance measuring method according to the twelfth aspect, the photographic lens is focused by the first autofocus method based on the contrast of the image signal of the subject obtained via the photographic lens. The focusing of the photographic lens is performed by the second autofocus method according to the distance measurement result of a distance measuring device having a pair of optical systems different from the photographic lens. The distance measuring device is capable of measuring the distances of the plurality of points according to the image signals of the plurality of points in the photographic screen. The contrast information in the photographic screen is detected, and the magnitude of the contrast is determined. Then, the first autofocus method and the second autofocus method are switched based on the result of the determination.
[0035]
According to the present invention, the priorities are switched according to the relationship between the distance of the subject and the distances of other subjects.
[0036]
BEST MODE FOR CARRYING OUT THE INVENTION
Hereinafter, embodiments of the present invention will be described with reference to the accompanying drawings.
[0037]
First, an outline of the present invention will be described with reference to FIG.
[0038]
FIG. 2A is a diagram showing an example of a scene in which a person who is a main subject is present in a landscape. FIG. 2B is a diagram in which the person who is a main subject is more cluttered than the scene shown in FIG. FIG. 2C is a diagram illustrating an example of a scene existing in a situation, and FIG. 2C is a diagram illustrating an example of a scene in which a main subject exists near an edge of a screen.
[0039]
In the case of the scene shown in FIG. 2A, since the distance of the subject is completely separated from the scenery on the
[0040]
However, since the imager AF determines the contrast of an image while moving the lens, there is a disadvantage that it takes time to start and stop the lens, and the time lag becomes longer. Such a type of focusing has not always been satisfactory in a scene as shown in FIG.
[0041]
That is, in such a scene, it is certain that the photographer is not only interested in one person but also in other people and backgrounds, and is not limited to the
[0042]
In such a situation, if a person is focused more than necessary for a long time, a photo opportunity is often missed. It is still good if the background is a stationary scenery. However, for example, in a scene where a plurality of people exist, such as a scene shown in FIG. And facial expressions may deviate from the photographer's intention.
[0043]
Therefore, in the situation as shown in FIG. 2B, in the present invention, focusing is performed with priority given to time.
[0044]
Next, with reference to FIG. 3, the principle of distance measurement of the external light type distance measuring device which plays an important role in the present invention will be described.
[0045]
In FIG. 3A, a pair of
[0046]
FIG. 3A shows that the image on the optical axis of the
[0047]
As described above, since several distance measuring points can be provided in the arrangement direction of the sensor array, distance data of
[0048]
In addition, a known active multi-ranging device may be used as the multipoint ranging device. For example, as shown in FIG. 4, a plurality of
[0049]
Next, a first embodiment of the present invention will be described.
[0050]
FIG. 1 is a block diagram showing the internal configuration of the camera according to the first embodiment of the present invention.
[0051]
In FIG. 1, a digital camera according to a first embodiment of the present invention includes a microprocessor (CPU) 11, a pair of
[0052]
The CPU 11 is arithmetic and control means for controlling the sequence of the entire camera, and includes the functions of a selection means and a control means. A
[0053]
The pair of
[0054]
The
[0055]
Then, the CPU 11 controls the focusing of the photographing
[0056]
Further, the
[0057]
After the focusing of the taking
[0058]
The A /
[0059]
Note that the
[0060]
Here, the positional relationship between the
[0061]
That is, the image of the
[0062]
FIG. 5B is an external perspective view of the camera according to the first embodiment.
[0063]
In FIG. 5B, a
[0064]
In the external light AF described above, a pair of
[0065]
On the other hand, the AF that uses the output of the image sensor via the photographing
[0066]
That is, this imager AF is a focus adjustment control based on a principle different from that for determining the focus position based on the subject distance, like the above-described external light AF.
[0067]
In such an imager AF, even when an error occurs in the position control of the photographing
[0068]
That is, in order to identify the main subject, after performing the above-described contrast determination for each of the
[0069]
On the other hand, in the external light AF, the image signals from the
[0070]
In addition, since the distances of the subjects other than the main subject need only be changed by switching the image signal of the subject used in the subject distance calculation, a wide range such as the
[0071]
FIG. 6 is a diagram showing an example of the distance distribution obtained as described above.
[0072]
If this distance distribution is obtained, it is possible to quickly detect where the main subject exists.
[0073]
Next, a basic concept of the present invention will be described as a first embodiment with reference to a flowchart of FIG.
[0074]
First, in step S1, a plurality of points on the screen are measured by the external light distance measuring device. For example, in the scene as shown in FIG. 2B, the distribution as shown in FIG. 6 is obtained, so that the closest distance is selected as the main subject distance L in step S2.
[0075]
Next, in step S3, it is determined whether or not the point indicating the closest distance (main subject position) has a greater difference than the distances of the other points. If the difference is small, the process proceeds to step S4. For example, in the scene shown in FIG. 2B, focusing is performed with priority given to speed as a snapshot. This is because, in such a scene, the image including the background becomes more problematic than just focusing on the person.
[0076]
In the example of the scene shown in FIG. 2B, there is a subject in front of a person, and these are also important for the photographer depending on the situation. Therefore, it is assumed that only the focus of the person is not always important, and the focus is adjusted with priority given to timing rather than some errors. Thereafter, the process proceeds to step S9, and the shooting ends.
[0077]
On the other hand, if the difference is large in step S3, the process proceeds to step S5. In the scene as shown in FIG. 2A, the distance of the
[0078]
However, if the contrast detection is performed over the entire area of the lens driving, a very long time loss occurs. Therefore, in step S5, the lens is driven (LD) before the lens position corresponding to the main subject distance L. Thereafter, contrast detection is started in step S6.
[0079]
Then, in step S7, the lens position where the contrast is maximized is detected. If it has not reached the maximum, the process proceeds to step S8, where the lens position is finely adjusted to find the position of the just focus.
[0080]
Steps S6 to S8 are repeated until a position where the contrast is maximized is found. Then, when the position reaches the position of the maximum contrast, the position is focused and the photographing is executed in step S9.
[0081]
As described above, according to the first embodiment, as shown in FIG. 2A, in a scene where the photographer's interest is narrowed down to one subject (here, a person). Focusing on a person is performed over a long period of time, and as shown in FIG. 2B, in a scene such as a snap at a party or a banquet, focusing control with priority given to speed is performed. You will not miss it.
[0082]
FIG. 8 is a timing chart for explaining the distance measuring operation of the camera according to the first embodiment.
[0083]
First, distance measurement is performed by an external light type distance measurement device, and lens control (LD) is performed based on the result. In the scene shown in FIG. 2A, the contrast detection is further performed from this point, and the lens position where the contrast reaches a peak is obtained, so that the lens control and the contrast detection are repeated (Δt period).
[0084]
However, in a scene as shown in FIG. 2B, this contrast detection is not performed. Therefore, shooting can be started in a short time by Δt. In addition, even if the composition is as shown in FIG. 2B, if it is desired to focus on a person exactly, a photograph may be taken using a known technique such as focus lock.
[0085]
Next, a second embodiment of the present invention will be described.
[0086]
The second embodiment is obtained by adding the zoom position of the photographing lens to the flowchart of FIG. 7 described above, and is effective for a camera having a zoom lens having a long focal length.
[0087]
That is, in a long focal length zoom lens, a small error of the focusing lens causes a large error to affect the image pickup. Therefore, in such a shooting scene, the imager AF is prioritized. In addition, in the scene as shown in FIG. 2B, since it is desired to include a lot of background and surrounding atmosphere in the screen, it is often considered that shooting is performed on the wide-angle side of the zoom lens. In consideration of the position and the subject position, a shooting scene in which a photo opportunity such as a snap shooting is prioritized is determined, and focusing is performed.
[0088]
Here, the ranging operation of the camera according to the second embodiment of the present invention will be described with reference to the flowchart of FIG.
[0089]
First, in step S11, the zoom position is determined using the
[0090]
However, as in the first embodiment described above, it is not always necessary to regard the subject indicating the closest distance as the main subject, and a selection method that gives priority to a predetermined distance or ignores a subject that is too close as a rough subject may be used. The present invention is applicable.
[0091]
Variations in the reciprocal of the distance of each point thus obtained are obtained. Since this variation can be determined based on the standard deviation σ or the like, the standard deviation σ is compared in step S15.
[0092]
If it is determined that σ is small, the process proceeds to step S16, and it is determined whether the zoom position is on the wide side. As a result, if the zoom position is on the wide side, the process proceeds to step S17, and the flag for performing the imager AF is set to 0. On the other hand, if it is determined in step S15 that the standard deviation σ is not small or that the zoom position is not on the wide side in step S16, the process proceeds to step S18, and the flag for performing the imager AF is set to 1. You.
[0093]
Next, in step S19, focusing is performed on the ∞ side (far side) from the main subject distance L obtained in step S14 by an error considered in lens control, and an important background is considered. You. Then, in step S20, a flag for performing the imager AF (imager flag) is determined.
[0094]
If the imager flag is not 1, the flow shifts to step S24 to start high-speed shooting without performing imager AF. However, if the flag for performing the imager AF is 1, the sequence enters an imager AF sequence in which feedback control can be performed in consideration of the lens stop position error.
[0095]
That is, in step S21, contrast detection is started using the image passed through the photographing lens. Next, if it is not determined in step S22 that the contrast of the image is the maximum, the process proceeds to step S23, where the lens is moved by a small amount, and then the process proceeds to step S21. That is, the contrast detection is repeated in steps S20 to S23 until it is determined that the contrast of the image is the maximum.
[0096]
At the point where the contrast of the image thus obtained is maximized, the lens driving (LD) is stopped, and shooting is performed in step S24.
[0097]
As described above, according to the second embodiment, taking into account the zoom position of the photographing lens, if the zoom position is on the wide side, the possibility of snap photography is high, and focusing with priority on speed is performed. I do. However, when photographing a main subject away from the background or in a telephoto state, photographing is performed with emphasis on focusing accuracy.
[0098]
As described above, according to the second embodiment, it is possible to provide an easy-to-use camera that can automatically determine a shooting state in consideration of a zoom position and select an optimal focusing method.
[0099]
Further, in the above-described flowchart of FIG. 9, the variation in the distance of each subject is determined using the standard deviation. However, the determination of the difference between the main subject distance and another distance in step S3 in the flowchart of FIG. 7 is performed. The steps may be changed to an algorithm as shown in FIG. Here, an example is shown in which zoom information is added to the determination method.
[0100]
In general, the amount of focusing and the reciprocal 1 / L of the distance have a proportional relationship as shown in FIG. However, when the focal length of the zoom lens is telephoto (telephoto) and when the zoom lens is wide-angle (wide), the distance range that can be covered at the same extended LD as shown in FIG. That is, Δ1 / L at the time of tele (T) T Can only cover the focus, but in wide (W) mode, a wider Δ1 / L W Can cover the width of
[0101]
In consideration of such a relationship, it is necessary to switch step S33 in the flowchart of FIG.
[0102]
In step S31, the average value of the reciprocals of the distances of all points obtained by the multi-ranging is set to 1 / L AV Is calculated as Next, in step S32, the
[0103]
In consideration of such a relationship, a branch determination is made in step S33. That is, it is determined whether the zoom position is tele (T). Here, if the zoom position is tele, the process proceeds to step S34; otherwise, the process proceeds to step S35.
[0104]
In step S34, Δ1 / L of the result obtained in step S32 and a predetermined value Δ1 / L T Is compared with As a result, if Δ1 / L is larger, the process proceeds to step S36, and if Δ1 / L is smaller, the process proceeds to step S37.
[0105]
Similarly, in step S35, Δ1 / L of the result obtained in step S32 and a predetermined value Δ1 / L W Is compared with As a result, if Δ1 / L is larger, the process proceeds to step S36, and if Δ1 / L is smaller, the process proceeds to step S37.
[0106]
In step S36, it is determined that the distance difference is large, and in step S37, it is determined that the distance difference is small. If the branch determination in step S3 in the flowchart of FIG. 7 is performed based on such a determination result, the situation of FIG. 2A or 2B can be determined, and the imager AF or the external light AF can be determined.
[0107]
Also, instead of the step of determining the difference between the main subject distance and the other distance in step S3 in the flowchart of FIG. 7, it is included in a predetermined distance range by the determination as shown in the flowchart of FIG. This may be performed according to the number of subjects.
[0108]
That is, first, in step S41, it is determined whether or not the zoom position is tele (T). Here, if the zoom position is tele, the process proceeds to step S42; otherwise, the process proceeds to step S43.
[0109]
In step S42, the reciprocal of the main
[0110]
Then, in step S44, it is determined whether or not n obtained in step S42 or step S43 is greater than 50% among all the ranging points of the multi-ranging. Here, if it is larger than 50%, the process proceeds to step S45, and it is determined that the difference in the distance is small. On the other hand, if the difference is less than 50%, the process moves to step S46, and it is determined that the difference in distance is large.
[0111]
Scene determination may be performed based on this result.
[0112]
As described above, the relationship between the distance between the main subject and the other subjects can be easily obtained by a determination method using simple calculations and comparisons. It is possible to provide an AF camera that can accurately switch the autofocus method and does not miss a photo opportunity.
[0113]
Next, a third embodiment of the present invention will be described.
[0114]
In the above-described embodiment, the shooting scene is determined only based on the distribution of the distance, but the present invention is not limited to this. For example, as shown in FIG. 2C, when the
[0115]
In addition to the distribution of the distance and the position of the subject, the shooting scene may be determined based on the state of the image signal on the screen.
[0116]
That is, in the scenes of FIGS. 2A and 2B, the image data obtained by the external light AF sensor array is as shown in FIGS. 13 and 14A, respectively. That is, in FIG. 2A, the background has only a monotonous shadow, and in FIG. 2B, there are various shadows because various subjects exist. In the case of such image data, there is a feature that rises and falls violently. To determine this feature, the amount of adjacent data is calculated, and if so-called differential data is used, large data is generated where there is a change. The data of the graph as shown in (b) is obtained.
[0117]
As shown in FIG. 14 (b), it is possible to determine whether the screen is simple or cluttered by checking the number of the differential data exceeding a predetermined value.
[0118]
FIG. 15 is a flowchart for explaining a distance measuring operation of a camera in which an image capturing scene is determined using image data obtained for external light distance measurement or the like and the external light AF and the imager AF are switched.
[0119]
That is, first, in step S51, an image signal is detected by the external light AF sensor. Next, in step S52, multipoint ranging is performed using the detection result of step S51. In step S53, the data indicating the shortest distance is determined as the main subject distance based on the result of step S52.
[0120]
In step S54, the distance field point obtained in step S53 is determined to be the main subject. In the following step S55, a differential value calculation, which is a feature of the third embodiment, is performed.
[0121]
Next, in step S56, as described above, the number of points exceeding a predetermined amount is checked, and the number is determined to be a predetermined value n 0 Is compared to As a result, the predetermined value n 0 If it is less, the process proceeds to step S57; otherwise, the process proceeds to step S61.
[0122]
In step S57, the photographing lens is driven before the lens position corresponding to the main subject distance L. Thereafter, contrast detection is started in step S58. Then, in step S59, the lens position where the contrast is maximized is detected. Here, if the maximum value has not been reached yet, the process proceeds to step S60, where the lens position is finely adjusted, and the position of the just focus is searched.
[0123]
Steps S58 to S60 are repeated until a position where the contrast is maximized is found. Then, when the position reaches the position of the maximum contrast, the position is focused and the photographing is executed in step S62.
[0124]
In step S61, focusing is performed on the distance L by distance measurement using external light. After that, the process shifts to step S62 to execute photographing.
[0125]
That is, the focusing by the imager AF after step S57 or the external light AF after step S61 is switched. In other words, it is assumed that a scene having more peaks at the time of differentiation is a cluttered scene, and there are various subjects, which are also considered to be important subjects. Conversely, in a scene with a small number of peaks, the main subject is the most important and the focus priority AF is set.
[0126]
As described above, according to the third embodiment, the scene determination is performed using the state of the image distribution in the screen, so that it is possible to select the most appropriate AF method for the situation.
[0127]
By the way, the change in the contrast of the subject state can be determined not only by the sensor array for external light distance measurement and the output of the image sensor, but also by using a photometric sensor for adjusting the exposure of the camera.
[0128]
In many digital cameras, exposure control is also performed using a CCD, but there is also a camera as shown in FIG. 16 which is equipped with a photometric sensor capable of instantaneously measuring light to lower luminance.
[0129]
FIG. 16 is a schematic sectional view showing the configuration of the camera according to the fourth embodiment of the present invention.
[0130]
In FIG. 16, the camera has a
[0131]
A
[0132]
An external light
[0133]
By using the photometric sensor having such a configuration, it is possible to measure the luminance distribution of the entire screen even though the resolution is not as high as that of the CCD.
[0134]
The present invention is also applicable to contrast determination using such a photometric sensor and switching of the AF method based on the determination.
[0135]
【The invention's effect】
As described above, according to the present invention, an optimal focusing method is adopted according to a scene. Therefore, in a scene in which the accuracy of focusing is important, a high accuracy is required. It is possible to provide an easy-to-use camera that can satisfy a photographer and that is easy to use, and a method of measuring the distance between the cameras by performing focusing with a method with a small time lag.
[Brief description of the drawings]
FIG. 1 is a block diagram showing an internal configuration of a camera according to a first embodiment of the present invention.
2A is a diagram showing an example of a scene in which a person who is a main subject exists in a landscape, and FIG. 2B is a situation in which a person who is a main subject is more cluttered than the scene shown in FIG. FIG. 3C is a diagram showing an example of a scene in which a main subject exists near the edge of the screen.
FIG. 3 is a diagram for explaining the principle of distance measurement of an external light distance measuring device that plays an important role in the present invention.
FIG. 4 is a diagram illustrating an active-type multi-ranging device.
5A is a diagram showing a positional relationship between
FIG. 6 is a diagram showing an example of a distance distribution.
FIG. 7 is a flowchart illustrating a distance measuring operation of the camera according to the first embodiment of the present invention.
FIG. 8 is a timing chart for explaining a distance measuring operation of the camera according to the first embodiment.
FIG. 9 is a flowchart illustrating a distance measuring operation of the camera according to the second embodiment of the present invention.
FIG. 10 is a flowchart illustrating a first example in which the step of determining a difference between the main subject distance and another distance in step S3 in the flowchart of FIG. 7 is changed.
FIG. 11 is a diagram illustrating the relationship between the amount of focus adjustment and the reciprocal 1 / L of the distance when the focal length of the zoom lens is telephoto (telephoto) and wide-angle (wide).
FIG. 12 is a flowchart illustrating a second example in which the step of determining a difference between the main subject distance and another distance in step S3 in the flowchart of FIG. 7 is changed.
FIG. 13 is a diagram showing characteristics of image data obtained by a sensor array of external light AF in the scene of FIG.
14A is a diagram illustrating characteristics of image data obtained by a sensor array of external light AF in the scene of FIG. 2B, and FIG. 14B is a diagram illustrating differential data of the image data of FIG. FIG. 4 is a diagram showing characteristics.
FIG. 15 is a flowchart illustrating a distance measuring operation of the camera according to the third embodiment of the present invention.
FIG. 16 is a schematic sectional view showing a configuration of a camera according to a fourth embodiment of the present invention.
17 is a diagram showing an example of a
[Explanation of symbols]
1 screen,
1a area,
2,10 subjects,
2a, 2b person,
2c background,
3a, 3b, 12a, 12b light receiving lens,
4a, 4b, 13a, 13b sensor array,
11 CPU,
11a switch,
14 Distance measuring unit,
14a A / D converter,
14b distance measurement calculation unit,
16 shooting lens,
17 imaging device,
18 analog / digital (A / D) converter,
19 image processing unit,
21 zoom detector,
22 recording media,
23 Light source.
Claims (16)
上記測距装置は、写真画面内の複数ポイントの測距が可能であり、上記複数の測距結果より、主要被写体とその他の被写体が、所定の距離範囲にあると判断した場合には、上記第2のオートフォーカス方式を優先したピント合わせを行う選択手段を具備することを特徴とするカメラ。A first autofocus method for focusing the photographing lens based on the contrast of an image signal of a subject obtained via the photographing lens, and a distance measuring device having a pair of optical systems different from the photographing lens. In a camera having a second auto-focus method for focusing the photographing lens according to the distance result,
The distance measuring device is capable of measuring a distance of a plurality of points in a photograph screen, and when it is determined that the main subject and other subjects are within a predetermined distance range from the plurality of distance measurement results, A camera comprising a selection unit that performs focusing with priority given to a second autofocus method.
上記測距装置は、写真画面内の複数ポイントの測距が可能であり、上記複数の測距結果の距離の分布に基づいて、上記第1のオートフォーカス方式と上記第2のオートフォーカス方式とを切り替えて測距を行う切り替え手段を具備することを特徴とするカメラ。A first autofocus method for focusing the photographing lens based on the contrast of an image signal of a subject obtained via the photographing lens, and a distance measuring device having a pair of optical systems different from the photographing lens. In a camera having a second auto-focus method for focusing the photographing lens according to the distance result,
The distance measuring device is capable of measuring a distance at a plurality of points in a photographic screen, and based on a distribution of distances as a result of the plurality of distance measurements, the first autofocus method and the second autofocus method. A camera comprising switching means for performing distance measurement by switching between the two.
上記多点測距手段によって、上記主要被写体がその他の被写体と差異のない距離に存在すると判定された場合には、上記測距結果に従って上記撮影レンズの合焦制御を行い、上記主要被写体がその他の被写体と離れた距離にあると判定された場合には、上記撮影レンズによって得られた被写体像のコントラストに従って合焦制御を行う制御手段と、
を具備することを特徴とするカメラ。Prior to photographing, multi-point distance measuring means for measuring the distance of a plurality of points in the photograph screen using an optical system other than the photographing lens to obtain the distance of the main subject and the position in the screen,
If it is determined by the multi-point distance measuring means that the main subject exists at a distance that is not different from other subjects, focus control of the photographing lens is performed according to the distance measurement result, and the main subject is Control means for performing focus control according to the contrast of the subject image obtained by the photographing lens when it is determined that the subject is at a distance from the subject,
A camera comprising:
上記撮影レンズとは異なる光学系によって、画面内の複数ポイントの距離を測定する多点測距手段と、
上記撮影レンズを介して得られた撮像手段のコントラストによってピント合わせ位置を決定するコントラスト式ピント合わせ手段と、
上記撮影レンズのズーム位置を検出するズーム位置検出手段と、
上記ズーム位置と、上記多点測距結果に従った主要被写体と背景との距離の関係から、上記コントラスト式ピント合わせ手段を作動させるか否かを決定する決定手段と、
を具備することを特徴とするカメラ。In a camera having a zoom lens as a taking lens,
Multi-point distance measuring means for measuring the distance of a plurality of points in the screen by an optical system different from the photographing lens,
A contrast-type focusing means for determining a focusing position by contrast of the imaging means obtained through the photographing lens,
Zoom position detection means for detecting the zoom position of the taking lens,
Determining means for determining whether to activate the contrast-type focusing means from the relationship between the zoom position and the distance between the main subject and the background according to the multipoint distance measurement result,
A camera comprising:
上記測距装置は写真画面内の複数ポイントの像信号に従って上記複数ポイントの測距が可能であり、
更に、上記像信号の微分データを求める微分手段と、
上記微分情報が所定のレベルより高い場合に、上記第2のオートフォーカス方式を優先したピント合わせを行うべく選択する選択手段と、
を具備することを特徴とするカメラ。A first autofocus method for focusing the photographing lens based on the contrast of an image signal of a subject obtained via the photographing lens, and a distance measuring device having a pair of optical systems different from the photographing lens. In a camera having a second auto-focus method for focusing the photographing lens according to the distance result,
The distance measuring device is capable of measuring the distance of the plurality of points according to image signals of the plurality of points in a photographic screen,
Further, differentiating means for obtaining differential data of the image signal,
Selecting means for selecting, when the differential information is higher than a predetermined level, to perform focusing with priority on the second autofocus method;
A camera comprising:
上記測距装置は写真画面内の複数ポイントの像信号に従って上記複数ポイントの測距が可能であり、
上記写真画面内のコントラスト情報を検出し、このコントラストの大きさを判断する判断手段と、
上記判断手段の結果に基づいて第1のオートフォーカス方式と第2のオートフォーカス方式とを切り替える切り替え手段と、
を具備することを特徴とするカメラ。A first autofocus method for focusing the photographing lens based on the contrast of an image signal of a subject obtained via the photographing lens, and a distance measuring device having a pair of optical systems different from the photographing lens. In a camera having a second auto-focus method for focusing the photographing lens according to the distance result,
The distance measuring device is capable of measuring the distance of the plurality of points according to image signals of the plurality of points in a photographic screen,
Determining means for detecting contrast information in the picture screen and determining the magnitude of the contrast;
Switching means for switching between the first autofocus method and the second autofocus method based on the result of the determination means;
A camera comprising:
上記判断手段は、上記測光手段による複数の領域の測光情報に基づいて上記写真画面内のコントラストを判断するようになされたことを特徴とする請求項7に記載のカメラ。The photographing screen is divided into a plurality of regions, and further includes photometric means for measuring the brightness of each region,
8. The camera according to claim 7, wherein said judging means judges a contrast in said photographic screen based on photometric information of a plurality of areas by said photometric means.
上記測距装置は、写真画面内の複数ポイントの測距が可能であり、上記複数の測距結果より、主要被写体とその他の被写体が、所定の距離範囲にあると判断した場合には、上記第2のオートフォーカス方式を優先したピント合わせを行うように選択することを特徴とするカメラの測距方法。Focusing of the photographing lens is performed by a first autofocus method based on the contrast of an image signal of a subject obtained via the photographing lens, and measurement is performed by a distance measuring device having a pair of optical systems different from the photographing lens. In a distance measuring method of a camera which focuses the photographing lens by a second autofocus method according to a distance result,
The distance measuring device is capable of measuring a distance of a plurality of points in a photograph screen, and when it is determined that the main subject and other subjects are within a predetermined distance range from the plurality of distance measurement results, A method for ranging a camera, comprising selecting to perform focusing with priority given to a second autofocus method.
上記測距装置は、写真画面内の複数ポイントの測距が可能であり、上記複数の測距結果の距離の分布に基づいて、上記第1のオートフォーカス方式と上記第2のオートフォーカス方式とを切り替えて測距を行うステップを具備することを特徴とするカメラの測距方法。Focusing of the photographing lens is performed by a first autofocus method based on the contrast of an image signal of a subject obtained via the photographing lens, and measurement is performed by a distance measuring device having a pair of optical systems different from the photographing lens. In a distance measuring method of a camera which focuses the photographing lens by a second autofocus method according to a distance result,
The distance measuring device is capable of measuring a distance at a plurality of points in a photographic screen, and based on a distribution of distances as a result of the plurality of distance measurements, the first autofocus method and the second autofocus method. A distance measuring method for the camera, comprising the step of performing distance measurement by switching between the two.
上記多点測距によって、上記主要被写体がその他の被写体と差異のない距離に存在すると判定された場合には、上記測距結果に従って上記撮影レンズの合焦制御を行い、上記主要被写体がその他の被写体と離れた距離にあると判定された場合には、上記撮影レンズによって得られた被写体像のコントラストに従って合焦制御を行うステップと、
を具備することを特徴とするカメラの制御方法。Prior to photographing, performing multi-point ranging of a plurality of points in the photograph screen using an optical system other than the photographing lens to obtain a distance of a main subject and a position in the screen,
When it is determined by the multi-point distance measurement that the main subject exists at a distance that is not different from other subjects, focus control of the photographing lens is performed in accordance with the distance measurement result, and the main subject is determined to be in another position. Performing a focus control according to the contrast of the subject image obtained by the photographing lens when it is determined that the subject is at a distance from the subject;
A camera control method, comprising:
上記撮影レンズとは異なる光学系によって、画面内の複数ポイントの距離を測定する多点測距を行うステップと、
上記撮影レンズを介して得られた撮影画像のコントラストによってピント合わせ位置を決定するステップと、
上記撮影レンズのズーム位置を検出するステップ、
上記ズーム位置と、上記多点測距の結果に従った主要被写体と背景との距離の関係から、上記ピント合わせ位置を決定するコントラスト式ピント合わせを作動させるか否かを決定するステップと、
を具備することを特徴とするカメラの測距方法。In a distance measuring method of a camera having a zoom lens as a photographing lens,
Performing a multi-point ranging for measuring the distance of a plurality of points on the screen by an optical system different from the photographing lens;
Determining a focus position based on the contrast of a captured image obtained through the shooting lens;
Detecting the zoom position of the taking lens,
From the relationship between the distance between the main subject and the background according to the zoom position and the result of the multi-point ranging, determining whether to activate the contrast-type focusing that determines the focusing position,
A distance measuring method for a camera, comprising:
上記測距装置は写真画面内の複数ポイントの像信号に従って上記複数ポイントの測距が可能であり、
更に、上記像信号の微分情報を求めるステップと、
上記微分情報が所定のレベルより高い場合に、上記第3のオートフォーカス方式を優先したピント合わせを行うべく選択するステップと、
を具備することを特徴とするカメラの測距方法。Focusing the photographing lens by a first autofocus method based on the contrast of an image signal of a subject obtained through the photographing lens, and a distance measuring device having a pair of optical systems different from the photographing lens Focusing the photographing lens by a second auto-focus method according to the distance measurement result of the camera.
The distance measuring device is capable of measuring the distance of the plurality of points according to image signals of the plurality of points in a photographic screen,
Determining a differential information of the image signal;
When the differential information is higher than a predetermined level, selecting to perform focusing with priority given to the third autofocus method;
A distance measuring method for a camera, comprising:
上記測距装置は写真画面内の複数ポイントの像信号に従って上記複数ポイントの測距が可能であり、
上記写真画面内のコントラスト情報を検出し、このコントラストの大きさを判断するステップと、
上記判断の結果に基づいて第1のオートフォーカス方式と第2のオートフォーカス方式とを切り替えるステップと、
を具備することを特徴とするカメラの測距方法。Focusing of the photographing lens is performed by a first autofocus method based on the contrast of an image signal of a subject obtained via the photographing lens, and measurement is performed by a distance measuring device having a pair of optical systems different from the photographing lens. In a distance measuring method of a camera which focuses the photographing lens by a second autofocus method according to a distance result,
The distance measuring device is capable of measuring the distance of the plurality of points according to image signals of the plurality of points in a photographic screen,
Detecting contrast information in the photo screen and determining the magnitude of the contrast;
Switching between the first autofocus method and the second autofocus method based on the result of the determination;
A distance measuring method for a camera, comprising:
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002325266A JP2004157456A (en) | 2002-11-08 | 2002-11-08 | Camera and range-finding method of camera |
| US10/644,646 US6895181B2 (en) | 2002-08-27 | 2003-08-20 | Camera and distance measuring method thereof |
| CN200310103474A CN100587584C (en) | 2002-11-08 | 2003-11-07 | Camera and its distance measuring method |
| US11/099,402 US7450838B2 (en) | 2002-08-27 | 2005-04-05 | Camera having autofocus adjustment function |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002325266A JP2004157456A (en) | 2002-11-08 | 2002-11-08 | Camera and range-finding method of camera |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004157456A true JP2004157456A (en) | 2004-06-03 |
Family
ID=32804549
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002325266A Withdrawn JP2004157456A (en) | 2002-08-27 | 2002-11-08 | Camera and range-finding method of camera |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2004157456A (en) |
| CN (1) | CN100587584C (en) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1617652A2 (en) * | 2004-07-12 | 2006-01-18 | Canon Kabushiki Kaisha | Hybrid autofocus system for a camera |
| US7365790B2 (en) | 2003-03-14 | 2008-04-29 | Ricoh Company, Ltd. | Autofocus system for an image capturing apparatus |
| WO2009090992A1 (en) * | 2008-01-17 | 2009-07-23 | Nikon Corporation | Electronic camera |
| JP2009171282A (en) * | 2008-01-17 | 2009-07-30 | Nikon Corp | Electronic camera |
| US8958009B2 (en) | 2010-01-12 | 2015-02-17 | Nikon Corporation | Image-capturing device |
| US9392159B2 (en) | 2011-09-02 | 2016-07-12 | Nikon Corporation | Focus estimating device, imaging device, and storage medium storing image processing program |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006301034A (en) * | 2005-04-15 | 2006-11-02 | Sony Corp | Autofocus device and method, and program |
| JP2006301032A (en) * | 2005-04-15 | 2006-11-02 | Sony Corp | Autofocus device, autofocus method, and program |
| JP4957943B2 (en) * | 2005-09-07 | 2012-06-20 | カシオ計算機株式会社 | Imaging apparatus and program thereof |
| JP5217600B2 (en) * | 2008-04-22 | 2013-06-19 | ソニー株式会社 | Imaging device |
| CN102186018A (en) * | 2011-04-29 | 2011-09-14 | 信源通科技(深圳)有限公司 | Camera focusing method and device |
| CN103376615A (en) * | 2012-04-24 | 2013-10-30 | 鸿富锦精密工业(深圳)有限公司 | Automatic focusing device and automatic focusing method |
| CN104457709B (en) * | 2013-09-12 | 2017-05-24 | 联想(北京)有限公司 | Distance detection method of and electronic equipment |
| CN104215215B (en) * | 2014-08-21 | 2017-07-25 | 深圳市金立通信设备有限公司 | A kind of distance-finding method |
| CN105791681B (en) * | 2016-02-29 | 2019-05-03 | Oppo广东移动通信有限公司 | Control method, control device and electronic device |
| CN105791680A (en) * | 2016-02-29 | 2016-07-20 | 广东欧珀移动通信有限公司 | Control method, control device and electronic device |
| CN109477948B (en) * | 2016-07-06 | 2021-02-19 | 富士胶片株式会社 | Focus control device, focus control method, focus control program, lens device, and imaging device |
| CN109443383A (en) * | 2018-10-31 | 2019-03-08 | 歌尔股份有限公司 | Scaling method, device and the readable storage medium storing program for executing of flight time ranging camera |
| CN112313941A (en) * | 2019-09-20 | 2021-02-02 | 深圳市大疆创新科技有限公司 | Control device, imaging device, control method, and program |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3115912B2 (en) * | 1991-07-31 | 2000-12-11 | オリンパス光学工業株式会社 | Image recording device |
| JPH0743605A (en) * | 1993-08-02 | 1995-02-14 | Minolta Co Ltd | Automatic focusing device |
-
2002
- 2002-11-08 JP JP2002325266A patent/JP2004157456A/en not_active Withdrawn
-
2003
- 2003-11-07 CN CN200310103474A patent/CN100587584C/en not_active Expired - Fee Related
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7365790B2 (en) | 2003-03-14 | 2008-04-29 | Ricoh Company, Ltd. | Autofocus system for an image capturing apparatus |
| US7778539B2 (en) | 2004-07-12 | 2010-08-17 | Canon Kabushiki Kaisha | Optical apparatus |
| EP1617652A3 (en) * | 2004-07-12 | 2006-04-05 | Canon Kabushiki Kaisha | Hybrid autofocus system for a camera |
| US7469098B2 (en) | 2004-07-12 | 2008-12-23 | Canon Kabushiki Kaisha | Optical apparatus |
| EP2015567A1 (en) * | 2004-07-12 | 2009-01-14 | Canon Kabushiki Kaisha | Hybrid autofocus system for a camera |
| CN100464243C (en) * | 2004-07-12 | 2009-02-25 | 佳能株式会社 | Optical apparatus |
| EP1617652A2 (en) * | 2004-07-12 | 2006-01-18 | Canon Kabushiki Kaisha | Hybrid autofocus system for a camera |
| WO2009090992A1 (en) * | 2008-01-17 | 2009-07-23 | Nikon Corporation | Electronic camera |
| JP2009171282A (en) * | 2008-01-17 | 2009-07-30 | Nikon Corp | Electronic camera |
| US8525888B2 (en) | 2008-01-17 | 2013-09-03 | Nikon Corporation | Electronic camera with image sensor and rangefinding unit |
| US8958009B2 (en) | 2010-01-12 | 2015-02-17 | Nikon Corporation | Image-capturing device |
| US9392159B2 (en) | 2011-09-02 | 2016-07-12 | Nikon Corporation | Focus estimating device, imaging device, and storage medium storing image processing program |
| US9648227B2 (en) | 2011-09-02 | 2017-05-09 | Nikon Corporation | Focus estimating device, imaging device, and storage medium storing image processing program |
Also Published As
| Publication number | Publication date |
|---|---|
| CN100587584C (en) | 2010-02-03 |
| CN1514297A (en) | 2004-07-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6895181B2 (en) | Camera and distance measuring method thereof | |
| KR0147572B1 (en) | Method & apparatus for object tracing | |
| US7965334B2 (en) | Auto-focus camera with adjustable lens movement pitch | |
| US7405762B2 (en) | Camera having AF function | |
| JP2004157456A (en) | Camera and range-finding method of camera | |
| JP2004109690A (en) | Camera system and camera | |
| JP2007233032A (en) | Focusing device and imaging apparatus | |
| JP2004279683A (en) | Image input device | |
| TWI393981B (en) | Use the flash to assist in detecting focal lengths | |
| JP2003029135A (en) | Camera, camera system and photographic lens device | |
| JP2009042621A (en) | Imaging apparatus and method | |
| JP2007233033A (en) | Focusing device and imaging apparatus | |
| JP2006065080A (en) | Imaging device | |
| JP2737388B2 (en) | Electronic camera autofocus device | |
| JP2004361431A (en) | Imaging unit | |
| JP2009109792A (en) | Autofocusing device and camera using it | |
| JP2004120582A (en) | Camera | |
| JP2008046556A (en) | Camera | |
| JP2016142924A (en) | Imaging apparatus, method of controlling the same, program, and storage medium | |
| JP2004069953A (en) | Camera | |
| US20230400753A1 (en) | Systems and cameras for tilting a focal plane of a super-macro image | |
| JP2004157386A (en) | Camera, range finder, range-finding method of camera and range-finding method | |
| JP2004151224A (en) | Camera | |
| JP2004198625A (en) | Camera | |
| JP4286077B2 (en) | Camera with flash light control function |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Application deemed to be withdrawn because no request for examination was validly filed |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20060110 |