EP4434873A1 - Skalierbare, modulare und rekonfigurierbare schwimmende energieplattform zum andocken, laden und reinigen mehrerer residenter wasserfahrzeuge - Google Patents
Skalierbare, modulare und rekonfigurierbare schwimmende energieplattform zum andocken, laden und reinigen mehrerer residenter wasserfahrzeuge Download PDFInfo
- Publication number
- EP4434873A1 EP4434873A1 EP23020149.3A EP23020149A EP4434873A1 EP 4434873 A1 EP4434873 A1 EP 4434873A1 EP 23020149 A EP23020149 A EP 23020149A EP 4434873 A1 EP4434873 A1 EP 4434873A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- platform
- unit
- floatable
- energy
- vehicles
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000003032 molecular docking Methods 0.000 title claims abstract description 73
- 238000004140 cleaning Methods 0.000 title claims abstract description 41
- 238000007600 charging Methods 0.000 title description 15
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 claims abstract description 41
- 238000012546 transfer Methods 0.000 claims abstract description 34
- 238000004891 communication Methods 0.000 claims abstract description 23
- 238000007667 floating Methods 0.000 claims abstract description 17
- 238000004146 energy storage Methods 0.000 claims abstract description 13
- 239000011248 coating agent Substances 0.000 claims description 4
- 238000000576 coating method Methods 0.000 claims description 4
- 230000010354 integration Effects 0.000 description 6
- 230000007774 longterm Effects 0.000 description 5
- 238000007689 inspection Methods 0.000 description 3
- 238000010248 power generation Methods 0.000 description 3
- 241001441732 Ostraciidae Species 0.000 description 2
- FAPWRFPIFSIZLT-UHFFFAOYSA-M Sodium chloride Chemical compound [Na+].[Cl-] FAPWRFPIFSIZLT-UHFFFAOYSA-M 0.000 description 2
- 238000003968 anodic stripping voltammetry Methods 0.000 description 2
- 235000019804 chlorophyll Nutrition 0.000 description 2
- 230000007613 environmental effect Effects 0.000 description 2
- 239000002803 fossil fuel Substances 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 230000005855 radiation Effects 0.000 description 2
- 235000002639 sodium chloride Nutrition 0.000 description 2
- 239000011780 sodium chloride Substances 0.000 description 2
- 238000006467 substitution reaction Methods 0.000 description 2
- 239000003643 water by type Substances 0.000 description 2
- 244000107946 Spondias cytherea Species 0.000 description 1
- 235000005138 Spondias dulcis Nutrition 0.000 description 1
- 230000003592 biomimetic effect Effects 0.000 description 1
- 230000001413 cellular effect Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000007123 defense Effects 0.000 description 1
- 238000010612 desalination reaction Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 239000006260 foam Substances 0.000 description 1
- 238000003306 harvesting Methods 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000029553 photosynthesis Effects 0.000 description 1
- 238000010672 photosynthesis Methods 0.000 description 1
- 230000000704 physical effect Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000003252 repetitive effect Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 239000013501 sustainable material Substances 0.000 description 1
- 239000012780 transparent material Substances 0.000 description 1
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B35/00—Vessels or similar floating structures specially adapted for specific purposes and not otherwise provided for
- B63B35/44—Floating buildings, stores, drilling platforms, or workshops, e.g. carrying water-oil separating devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B21/00—Tying-up; Shifting, towing, or pushing equipment; Anchoring
- B63B21/02—Magnetic mooring equipment
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B59/00—Hull protection specially adapted for vessels; Cleaning devices specially adapted for vessels
- B63B59/04—Preventing hull fouling
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B59/00—Hull protection specially adapted for vessels; Cleaning devices specially adapted for vessels
- B63B59/06—Cleaning devices for hulls
- B63B59/08—Cleaning devices for hulls of underwater surfaces while afloat
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63G—OFFENSIVE OR DEFENSIVE ARRANGEMENTS ON VESSELS; MINE-LAYING; MINE-SWEEPING; SUBMARINES; AIRCRAFT CARRIERS
- B63G8/00—Underwater vessels, e.g. submarines; Equipment specially adapted therefor
- B63G8/001—Underwater vessels adapted for special purposes, e.g. unmanned underwater vessels; Equipment specially adapted therefor, e.g. docking stations
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B35/00—Vessels or similar floating structures specially adapted for specific purposes and not otherwise provided for
- B63B35/44—Floating buildings, stores, drilling platforms, or workshops, e.g. carrying water-oil separating devices
- B63B2035/4433—Floating structures carrying electric power plants
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B35/00—Vessels or similar floating structures specially adapted for specific purposes and not otherwise provided for
- B63B35/44—Floating buildings, stores, drilling platforms, or workshops, e.g. carrying water-oil separating devices
- B63B2035/4433—Floating structures carrying electric power plants
- B63B2035/4453—Floating structures carrying electric power plants for converting solar energy into electric energy
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B35/00—Vessels or similar floating structures specially adapted for specific purposes and not otherwise provided for
- B63B35/44—Floating buildings, stores, drilling platforms, or workshops, e.g. carrying water-oil separating devices
- B63B2035/4433—Floating structures carrying electric power plants
- B63B2035/446—Floating structures carrying electric power plants for converting wind energy into electric energy
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63G—OFFENSIVE OR DEFENSIVE ARRANGEMENTS ON VESSELS; MINE-LAYING; MINE-SWEEPING; SUBMARINES; AIRCRAFT CARRIERS
- B63G8/00—Underwater vessels, e.g. submarines; Equipment specially adapted therefor
- B63G8/001—Underwater vessels adapted for special purposes, e.g. unmanned underwater vessels; Equipment specially adapted therefor, e.g. docking stations
- B63G2008/002—Underwater vessels adapted for special purposes, e.g. unmanned underwater vessels; Equipment specially adapted therefor, e.g. docking stations unmanned
- B63G2008/004—Underwater vessels adapted for special purposes, e.g. unmanned underwater vessels; Equipment specially adapted therefor, e.g. docking stations unmanned autonomously operating
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63G—OFFENSIVE OR DEFENSIVE ARRANGEMENTS ON VESSELS; MINE-LAYING; MINE-SWEEPING; SUBMARINES; AIRCRAFT CARRIERS
- B63G8/00—Underwater vessels, e.g. submarines; Equipment specially adapted therefor
- B63G8/001—Underwater vessels adapted for special purposes, e.g. unmanned underwater vessels; Equipment specially adapted therefor, e.g. docking stations
- B63G2008/002—Underwater vessels adapted for special purposes, e.g. unmanned underwater vessels; Equipment specially adapted therefor, e.g. docking stations unmanned
- B63G2008/008—Docking stations for unmanned underwater vessels, or the like
Definitions
- This invention relates to a scalable, modular and reconfigurable floatable renewable energy platform for providing docking, charging and cleaning functionalities of multiple types of marine vehicles. These vehicles can but don't have to be autonomous .
- the platform needs to be reconfigurable and easily scalable in sense of all subsystems.
- ASVs with solar and/or wind power generators are produced e.g., by Open Ocean Robotics, L3 Harris, and Aanderaa companies. Combinations of an ASV and an
- AUV/ROV are offered e.g., by Marine Advanced Robotics Inc, L3 Harris and ECA Group.
- Maritime robotics markets its Mariner X model as an ASV with integrations for docking ROV/AUV and UAV. None of the above-mentioned companies offers residency for all three types of vehicles (surface, aerial, and underwater) in a form of some energy independent docking platform. Residency in maritime robotics field is mostly developed at the sea floor and used by either AUVs or ROVs, e.g., ARV-I system developed by Boxfish Research and Transmark Subsea companies, SAAB's hybrid AUV Sabertooth on a Modus docking platform, or Kongberg's eel -shaped AUV Eelume. Such residency systems are not energy independent so the energy is assumed to be provided by the infrastructure that is inspected.
- ASV-ROV/UAV combination of vehicles for aerial for target tracking is described in CN110362118 .
- Combination of an ASV and an ROV cleaning system for deep sea fishing is disclosed in CN112642821 , as well as in US20180162504 .
- At-sea docking residency stations are mostly deployed at sea floor and are not energy independent, as elaborated in US20180162504 , US20090114140 , EP3110690 , US10858076 .
- Invention disclosed in US 2021/0307305 includes combination of an ASV with a UAV and AUV used for fishing. However, it does not mention residency of those vehicles at some location or infrastructure of interest nor a docking station that would enable long-term autonomy of such a multi-vehicle system. It also does not mention modularity or scalability of the whole multi-vehicle system.
- an object of the present invention is to provide a reconfigurable, modular and easily scalable floatable energy platform for a long-term resident autonomy.
- the present invention relates to a scalable modular and reconfigurable floatable energy platform comprising one or more interconnected unit platforms capable of floating on water, the one or more-unit platforms includes: at least one source of renewable energy and combinations thereof carried by the unit platform for recharging of various types of manned and unmanned vehicles and an integrated energy storage; a means of wireless communication with various types of manned and unmanned vehicles and with a remote command and control centers, and a power transfer equipment capable of recharging and docking at least one type of manned and unmanned underwater, surface and aerial vehicle; and a biofouling and cleaning equipment incorporated in docking stations, each docking station comprising the power transfer equipment for various types of manned and unmanned vehicles, wherein the more unit platforms are physically, communicative and electrically interconnected and where a total capacity of the floatable energy platform is configured to be scalable and reconfigurable by adjusting a number of interconnected unit platforms.
- the present invention further relates to a unit platform capable of floating on water, having a hexagonal, triangle shape or trapezoidal shape and lightweight, durable, buoyant chamber having biofouling preventing coating, the unit platform comprising: at least one source of renewable energy carried by the unit platform for recharging of various types of manned and unmanned vehicles and an integrated energy storage; a means of wireless communication with various types of manned and unmanned vehicles and to a remote command and control centers, and a power transfer equipment capable of recharging and docking at least one type of manned and unmanned underwater, surface and aerial vehicle; and a biofouling and cleaning equipment incorporated in docking stations, each docking station comprising the power transfer equipment for various types of manned and unmanned underwater, surface and aerial vehicles.
- An object of the present invention is to provide docking, charging, and cleaning service platforms that can be easily transported and deployed in any aquatic and remote environment.
- Another object of this invention is to provide docking, charging, and cleaning services for one or more surface vessels/vehicles and/or underwater vehicles and/or aerial vehicles.
- Another object of this invention is to provide charging services for both manned and unmanned vessels/vehicles from a renewable energy harvesting subsystem(s) installed.
- This can include, but is not limited to, solar and/or wind and/or current and/or wave energy generating subsystems.
- Another object of this invention is a scalability of such a platform to form a larger floatable energy platform with the same functionalities as one unit platform, but with a significant amount of redundancy.
- Another object of this invention is a reconfigurability of a larger floatable energy platform into a few smaller floatable energy platforms that can have the same functionalities as the larger platform.
- Another object of this invention is a merger of platform(s) with various types and number of marine vehicles to form a resident energy independent autonomous system that can be deployed on any body of water for inspection, monitoring, security, intervention, or any other purpose that the design of the vehicles and their payload(s) allow.
- Some embodiments of this invention feature a floatable energy platform providing docking, charging, and cleaning services for various manned and unmanned marine vehicles/vessels that is installed onto some infrastructure of interest.
- the infrastructure can be but is not limited to bridge pilons, oil and gas rigs, as well as offshore wind turbines.
- This embodiment uses power and communication systems of the infrastructure that it is installed onto.
- this invention features a scalable modular and reconfigurable multifunctional floatable platform that includes at least one source of renewable energy and equipment needed for recharging of various types of manned and unmanned vehicles.
- the source includes at least one photovoltaic solar panel that are (i) made to withstand conditions at any body of water and (ii) can withstand the weight of at least one human.
- Other sources include, but are not limited to wind, waves, and current energy.
- the platform can store electric energy in an integrated energy storage with enough capacity to enable multiple vehicles to recharge.
- a shape of a basic unit of an energy self-sufficient platform is hexagonal, for various stable physical properties such as stability, robustness, and ease of tiling.
- This invention further features various means of wireless communication with manned and unmanned vehicles/vessels above the body of water and the main control center on land, which can be but are not limited to WiFi, LoraWAN, cellular, and satellite communication. It also features equipment for underwater communication, be it acoustic, optic or any other modems. Further, the invention can be equipped with various sensors.
- the present invention features a water desalinization and sea salt/biofouling cleaning equipment.
- a surface of a platform above the waterline can be autonomously cleaned by an unmanned aerial vehicle (UAV) using tools embedded on a top surface of the platform.
- a submerged part of the platform can be cleaned by a remotely operated vehicle (ROV) or an autonomous underwater vehicle (AUV) using tools embedded at a bottom side of the platform.
- UAV(s) and ROV(s)/AUV(s) can be cleaned by docking and cleaning modules installed on a top and/or bottom side of the platform, respectively.
- An autonomous surface vehicle (ASV) can be cleaned by a docking and cleaning station mounted on a lateral side of the platform. Cleaning services performed autonomously by UAV(s) and ROV(s)/AUV(s) can also be provided for the manned vessels moored to the platform.
- the present invention features a power transfer equipment capable of recharging and docking at least one type of manned and unmanned underwater, surface and aerial vehicle.
- the power transfer equipment can be but is not limited to the use of elastic springs with magnets on each end to ensure reliable but elastic physical link between the platform and a docked surface vessel.
- ROV(s)/AUV(s) can be docked in a hull(s) of the ASV and/or in the dockings below the platform.
- UAV(s) can be docked on a landing platform on a top of the ASV and/or on a top surface of a main platform structure.
- Securing a floatable energy platform in a position can be performed by tying the platform to a buoy that is moored, e.g., in shallow waters where this is possible.
- Another embodiment of this invention enables moving the floatable energy platform, but also a dynamical positioning feature of the whole floatable energy platform using (azimuth) thrusters mounted on a bottom part of the floatable energy platform and/or unit platform.
- this invention can easily be scaled up to create a much bigger floatable energy platform than previously mentioned herein.
- a mosaic of hexagonal unit platforms can easily be made, with a plurality of elastic spring-magnet links between each unit platform. These links can provide both physical, communication and electrical connection of the unit platforms. Since each unit platform can have an integrated energy storage, a total capacity of a whole floatable energy platform is easily scalable. Furthermore, a large (actuated) docking floatable energy platform can reconfigure itself to a few smaller floatable energy platforms having the same functionalities as the large one in case energy is needed at a few distant positions at sea.
- Such larger floatable energy platform can be used to recharge batteries of fossil fuel powered sailboats/yachts and electric yachts, but in the future, it could be used even for larger fully electric ships. Due to inherent modularity, a larger scaled-up floatable energy platform can have all the same functionalities as the unit platform regarding communication, power generation, sensors, biofouling cleaning, docking, and actuation, etc.
- the present invention can be accomplished by a buoyant structure capable of floating on water, that enables docking, charging, and cleaning services for one or more surface vessels/vehicles and/or underwater vehicles and/or aerial vehicles. These vehicles can but don't have to be autonomous .
- the structure/docking station can be easily transported and deployed in any aquatic and/or remote environment. Certain illustrative combinations of components and capabilities are described herein, with other combinations occurring to those skilled in the relevant technical arts after reviewing this disclosure.
- a currently preferred buoyant structure is designed to be a modular, scalable and reconfigurable multifunctional quick-deploy, micro-grid floatable energy platform 100 for docking, charging and cleaning of multiple and various types of manned and unmanned marine vehicles.
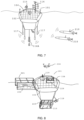
- Vehicles can be, but are not limited to, resident manned or unmanned surface 220 and/or underwater 210 and/or aerial vehicles 230 used for long-term survey and/or inspection and/or intervention tasks at some infrastructure 200 or location of interest.
- the floatable energy platform 100 can be used to recharge batteries of fossil fuel powered yachts and boats. In the future, it may even charge fully electric boats and ships.
- the floatable energy platform 100 can be deployed at any body of water.
- floatable energy platforms 100 and/or one or more interconnected unit platforms 101 capable of floating on water with integrated devices have one or more capabilities as follows: Integrated Communications and Data Transfer to remote command and control centers; Integrated Dock Side and Wireless Charging devices and capabilities; Integration of Vertical Wind Power, Wave Energy, Tidal Power, and/or Solar Power Generation sources and devices; Integrated Energy Storage, Battery Charging Management Systems, Power Conversion and Inverters; Integration of Water Sensing devices; Integration of Autonomous Navigation system and capabilities; Integration of Electric Marine Propulsion systems; Integration of Water Desalination Systems; Integrated Sustainable Materials; and/or Integrated Data and Communication for Wireless Signal Services.
- a modular, scalable and reconfigurable floatable energy platform 100 includes one or more interconnected unit platforms 101 capable of floating on water.
- Each unit platform 101 comprises a lightweight, foldable, durable, buoyant chamber 102 that has biofouling preventing coating. It can be made of a robust buoyant foam or can be inflatable for easier transportation.
- the floatable energy platform 100 benefits a tiling property of a hexagonal shape of the unit platform 101.
- a superstructure of a larger floatable energy platform 100 comprises a plurality of hexagonal unit platforms 101, but can also be supplemented with semi-hexagonal/trapezoidal 101A and/or triangular unit platforms 101B if a long flat surface is needed for some reason.
- FIG. 3 schematically illustrates, a large floatable energy platform 100 that may be reconfigured into a few smaller floating energy platforms 100A, 100B and 100C in case e.g., energy generation is needed urgently at a few distant locations.
- a shape of the unit platform 101 can be, but is not limited to, the hexagonal shape 101, triangle shape 101B or trapezoidal shape 101A.
- a size of different shapes of unit platforms 101 is configured so that said different shapes can be connected/tiled to form a flat floatable energy platform 100.
- the hexagonal shape of the unit platform 101 is a preferred shape due to its favorable biomimetic tiling properties on water.
- the hexagonal unit platforms 101 can be designed to fit a standard transport pallet, or ship containers.
- the scalable, modular and reconfigurable floatable energy platform 100 comprises one or more interconnected unit platforms 101 capable of floating on water.
- the one or more-unit platforms 101 includes at least one source of renewable energy carried by the unit platform 101 for recharging of various types of manned and unmanned underwater, surface and aerial vehicles 210, 220, 230 and an integrated energy storage 103; a means of wireless communication with various types of manned and unmanned vehicles 210, 220, 230 and to a remote command and control centers, and a power transfer equipment 120 capable of recharging at least one type of manned and unmanned underwater, surface and aerial vehicle 210, 220, 230; and a biofouling and cleaning equipment 118, 119) incorporated in docking stations 221, 223, 224, each docking station 221, 223, 224 comprising the power transfer equipment 120 for various types of manned and unmanned underwater, surface and aerial vehicles 210, 220, 230.
- the underwater, surface and aerial vehicles 210, 220, 230 can but don't have to be autonomous.
- the more unit platforms 101 are physically, communicative and electrically interconnected and where a total capacity of the floatable energy platform 100 is configured to be scalable and reconfigurable by adjusting a number of interconnected unit platforms 101.
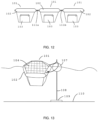
- the floatable energy platform 100 comprising one or more interconnected unit platforms 101 capable of floating on water or the unit platform 101 each may be autonomous and all its subsystems (power management, navigation, guidance, control, sensor data processing, etc.) are controlled by a main onboard computer. Positioning of the unit platform 101 or floating energy platform 100 close to the desired infrastructure 200 or location can be done in a passive and active manner, as shown in FIGS. 13 , 14 and 15 . The passive positioning of the unit platform 101 or floating energy platform 100 can be done by mooring over a buoy 107. The unit platform 101 or floating energy platform 100 is secured to the buoy 107, where the buoy 107 is connected to a tie rod or rope 108 moored to a bottom 110 of the body of water.
- FIG. 14 illustrates the active positioning of the floatable energy platform 100 or the unit platform 101, wherein the one or more-unit platforms 101 include at least one thruster 106a-d in configuration that allows dynamical positioning of the one or more-unit platform 101.
- the active positioning includes thrusters 106, preferably but not limited to, four thrusters 106a-d in X configuration that allow dynamical positioning of the floatable energy platform 100 or unit platform 101 with an arbitrary heading, but also movement and relocation of the floatable energy platform 100 or unit platform 101 if it is needed somewhere else.
- the thrusters 106a-d can be, but are not limited to, azimuth thrusters 106a-d so that each thruster 106a-d can be independently oriented in a horizontal plane. Furthermore, those skilled in the art will come up with other configurations with other types and number of thrusters 106a-d to achieve the same functionality.
- the preferred embodiment of the invention is energy independent and uses at least one source of renewable energy and combinations thereof, the source of renewable energy can be solar 104, wind 105, tidal 105A, wave, or any other to generate electricity, as shown in FIGS. 4 to 8 , 11B to 14 . All generators (be it solar, wind, tidal, wave or other) are configured to optimally orient themselves to maximize harvested energy.
- the electrical energy is stored in an integrated energy storage 103.
- the integrated energy storage 103 can have enough capacity to charge all the resident vehicles at least once between their missions.
- the present invention can use various means of communication via an integrated communication equipment with a base station on land, autonomous, and manned vehicles 210, 220, 230, as shown in FIG. 6 .
- the unit platform 101 or floatable energy platform 100 can communicate wirelessly with the base station on land being a remote command and control centers using, but not limited to, WIFI- 112a, and/or LoraWAN- 112b, and/or cellular- 112c, and/or satellite-112d. It can communicate with both manned and unmanned vehicles 220, 230 through air using the above-mentioned technologies. Furthermore, it can communicate with underwater vehicles 210 using, but not limited to, an acoustic 113 and/or optic 114 modems.
- An IOT (internet of things) communication system is included in some constructions.
- the unit platform 101 or floatable energy platform 100 comprising one or more interconnected unit platforms 101 capable of floating on water includes various water and air sensing devices, as shown in FIG 7 .
- the sensing devices can include, but are not limited to, (a) cameras above and/or below water 115 that can be RGB, RGBD, multispectral, etc.; (b) IMU and GNSS sensors used for estimating platform's position and orientation in 3D space; (c) aerial weather station 116 that can, but is not limited to include thermometer and/or anemometer, air barometer, UV radiation, lightning, and pollution sensors (NOx, PM5, PM10, and/or any other); (d) underwater environmental sensors 116A that can include, but are not limited, to pH, temperature, chlorophyl, salinity sensors.
- This invention can be used as a so-called underwater lighthouse for underwater vehicles 210 since it can be mounted with 4 or more acoustic transponders 117 in a USBL or SBL configuration.
- the underwater vehicles 210 in this case get the GNSS position of the floatable energy platform 100 or unit platform 101 and their relative position w.r.t. it so they can compute their georeferenced position.
- the unit platform 101 is also providing docking and biofouling cleaning services for itself, but also for various types of vehicles 210, 220, 230.
- the one or more-unit platforms (101) include a water desalinization system and high-pressure pumps.
- the water desalinization system and high-pressure pumps can be incorporated in the biofouling and cleaning equipment 118, 119 for various types of manned and unmanned vehicles 210, 220, 230.
- the surface vehicle 220 is cleaned in enclosed docking stations 221 using the high-pressure pumps that push the desalinated water both above and under the water surface.
- the docking stations 221 are mounted on a lateral side of the one or more-unit platforms 101, the docking station 221 is equipped with high-pressure pumps that push a desalinated water both above and under the surface vehicle 220.
- ROV and/or AUV 210 can clean the underwater part of the surface vehicle 220 and/or the platform using cleaning equipment 118 mounted on a bottom side of the one or more-unit platforms 101.
- ROV and/or AUV 210 are cleaned of biofouling in specialized enclosed docking station 223 on the bottom side of the one or more-unit platforms 101 and/or floatable energy platform 100 using the high-pressure desalinized water.
- the aerial vehicle 230 can be cleaned of sea salt and biofouling in a specialized enclosed docking station 224 arranged on a top side of the one or more-unit platforms 101101 and/or floatable energy platform 100 using the high-pressure desalinized water. Moreover, the unit platform 101 itself can be cleaned by the aerial vehicle 230 capable of using cleaning equipment 119 arranged on the top side of the one or more-unit platforms 101101 and/or floatable energy platform 100.
- the biofouling and cleaning equipment 118, 119 can be incorporated in docking stations 221, 223, 224, each docking station 221, 223, 224 comprising the power transfer equipment 120 for various types of manned and unmanned vehicles 210, 220, 230.
- FIG. 9 illustrates the power transfer equipment 120 capable of recharging at least one type of manned and unmanned vehicle for the surface vessel 220.
- the surface vessel 220 can be, but is not limited to, autonomous vehicle.
- the surface vehicle 220 docks onto the floatable energy platform 100 or unit platform 101 via a docking station 221 or by means of the power transfer equipment 120.
- the surface vehicle 220 is configured to be connected to power transfer equipment 120 via a plurality of elastic links 111a-n.
- at least one hull of the surface vehicle 220 includes an assembly configured to be connected to the links 111a-n.
- the links 111a-n have (electro)magnets on its ends, and a spring system in a middle.
- a surface vessel In case of a surface vessel, it can be recharged by the said elastic links 111a-n, if it has compatible assembly configured to receive links 111a-n. If not, it can be tied to the railing on an outer edge of the floatable energy platform 100 or unit platform 101 and recharged using a standard connector (220 V AC IEC 309 and/or L5-20 110V, or other).
- the power transfer equipment 120 for the surface vessels 220 is arranged at the unit platforms 101 being located on outer edges of the floatable energy platform 100.
- An underwater docking station 223 capable of docking, wireless recharging and cleaning subsystem 118 for the AUV/ROV 210 can be mounted on the bottom side of the floatable energy platform 100 or one or more-unit platforms 101 ( FIGS. 8 and 10B ). Another embodiment is to have a custom-made docking station 223 for the AUV/ROV 210.
- Said docking station 223 comprises incorporated the power transfer equipment 120 and biofouling and cleaning equipment and can be placed inside hull(s) of the surface vehicle 220, e.g.,
- the surface vehicle 220 can be a single hull 220A, catamaran 220A, 220B, or trimaran ASV 220A, 220B, 220C as illustrated in FIG. 10A .
- FIG. 11B is a schematic representation of the docking station 224 configured for wireless charging and including cleaning equipment used by the UAV 230.
- Said docking station 224 can be mounted on the top surface of the floatable energy platform 100 and/or unit platform 101. In another embodiment of the invention, said docking station 224 can be mounted on a top surface of the surface vehicle 220, as shown in FIG. 11A .
- FIG. 12 is a schematic illustration of a plurality of the unit platforms 101 being physically, communicative and electrically interconnected with the plurality of elastic physical links 111an.
- the plurality of the unit platforms 101 are mutually daisy chained with the plurality of elastic links 111a-c that provide physical, but also power and communication connection between neighboring unit platforms 101. Since each unit platform 101 contains its own integrated energy storage system 103, a total capacity of the floatable energy platform 100 is easily scalable.
- Power generation and delivery systems of the floatable energy platform 100 reflect those of each unit platform 101. Furthermore, this can also hold for all other positioning, communication, sensor, biofouling cleaning, docking and charging subsystems that were mentioned above, but in this case possibly in greater numbers.
- the floatable energy platform 100 can be used for docking not only smaller autonomous and manned vessels, but also larger boats and ships that can be fully electrically powered. In case that the floatable energy platform 100 would significantly obstruct the flora and fauna of the body of water below it, transparent materials can be used for the solar panels 104 and unit platform body 100 so that the effect on photosynthesis is reduced.
- FIG. 15 Another embodiment of this invention features a simpler unit platform 101 providing docking, charging, and cleaning services for various unmanned vehicles/vessels that is installed onto some infrastructure 200 of interest, as illustrated in FIG. 15 .
- Infrastructure 200 can be, but is not limited to, bridge pilons, oil and gas rigs, as well as offshore wind turbines.
- This embodiment uses power and communication systems of the infrastructure 200 that it is installed onto.
- the unit platform 101 is thus connected to communication and/or power systems of the infrastructure and as such is not independent.
- the surface vehicle 220 has a docking, charging and cleaning subsystems 005 for the AUV/ROV 210 in its hull(s) 220A, 220B.
- the UAV 230 is docked, charged and cleaned on such a system mounted on a top platform of the surface vehicle 220.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Ocean & Marine Engineering (AREA)
- Aviation & Aerospace Engineering (AREA)
- Architecture (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Charge And Discharge Circuits For Batteries Or The Like (AREA)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP23020149.3A EP4434873A1 (de) | 2023-03-22 | 2023-03-22 | Skalierbare, modulare und rekonfigurierbare schwimmende energieplattform zum andocken, laden und reinigen mehrerer residenter wasserfahrzeuge |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP23020149.3A EP4434873A1 (de) | 2023-03-22 | 2023-03-22 | Skalierbare, modulare und rekonfigurierbare schwimmende energieplattform zum andocken, laden und reinigen mehrerer residenter wasserfahrzeuge |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP4434873A1 true EP4434873A1 (de) | 2024-09-25 |
Family
ID=85726682
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP23020149.3A Pending EP4434873A1 (de) | 2023-03-22 | 2023-03-22 | Skalierbare, modulare und rekonfigurierbare schwimmende energieplattform zum andocken, laden und reinigen mehrerer residenter wasserfahrzeuge |
Country Status (1)
| Country | Link |
|---|---|
| EP (1) | EP4434873A1 (de) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN120171816A (zh) * | 2025-05-20 | 2025-06-20 | 国家海洋技术中心 | 无人机海上停驻平台及其无人机跟踪方法、海洋监测系统 |
| WO2026012951A1 (de) * | 2024-07-09 | 2026-01-15 | Philipp Gasteiger | Mobile, modulare lande-, andock- und ladeplattform für unbemannte fahrzeuge |
Citations (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20090114140A1 (en) | 2007-11-05 | 2009-05-07 | Schlumberger Technology Corporation | Subsea operations support system |
| US20150251739A1 (en) * | 2012-10-08 | 2015-09-10 | Korea Institute Of Industrial Technology | Docking station for underwater robot |
| EP3110690A1 (de) | 2014-02-24 | 2017-01-04 | Subsea 7 Limited | Unterwasserbeherbergung von unbemannten unterwasserfahrzeugen |
| KR20170043035A (ko) | 2015-10-12 | 2017-04-20 | 대우조선해양 주식회사 | 수중, 수면 및 수상 복합 검사 시스템 |
| US20180162504A1 (en) | 2016-12-13 | 2018-06-14 | Oceaneering International, Inc. | System and Method For Using A Combination Of Multiple Autonomous Vehicles With Different Abilities, Working Together As A System For Subsea Oil and Gas Exploration |
| US20190061885A1 (en) * | 2017-03-15 | 2019-02-28 | Power Docks LLC | Modular Floating Microgrid Energy Platforms |
| CN109703705A (zh) | 2018-12-26 | 2019-05-03 | 哈尔滨工程大学 | 一种半潜式无人平台 |
| US20190135393A1 (en) | 2017-11-03 | 2019-05-09 | Aquaai Corporation | Modular biomimetic underwater vehicle |
| EP3501966A1 (de) | 2017-12-20 | 2019-06-26 | Xocean Limited | Unbemanntes meeresoberflächenschiff |
| CN110362118A (zh) | 2019-07-08 | 2019-10-22 | 长江大学 | 空中海面水下多机器人远程立体协同控制系统及其控制方法 |
| US10858076B2 (en) | 2018-06-06 | 2020-12-08 | Oceaneering International, Inc. | ROV deployed buoy system |
| US20210064034A1 (en) * | 2019-05-06 | 2021-03-04 | Florida Atlantic University Board Of Trustees | Hybrid aerial/underwater robotics system for scalable and adaptable maintenance of aquaculture fish farms |
| CN112642821A (zh) | 2020-12-31 | 2021-04-13 | 华中科技大学 | 一种深远海渔场无人一体化异构清洗系统 |
| US20210307305A1 (en) | 2020-04-01 | 2021-10-07 | Lillian R. Fu | Nature-Inspired Design and Engineering of Autonomous Seafood Capturing, Sorting and Delivering System |
| CN113859530A (zh) | 2021-11-05 | 2021-12-31 | 中国科学院力学研究所 | 一种携载auv的多栖跨介质航行器 |
| US11292563B2 (en) | 2017-12-09 | 2022-04-05 | Oceaneering International, Inc. | Methods for subsea vehicles supervised control |
-
2023
- 2023-03-22 EP EP23020149.3A patent/EP4434873A1/de active Pending
Patent Citations (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20090114140A1 (en) | 2007-11-05 | 2009-05-07 | Schlumberger Technology Corporation | Subsea operations support system |
| US20150251739A1 (en) * | 2012-10-08 | 2015-09-10 | Korea Institute Of Industrial Technology | Docking station for underwater robot |
| EP3110690A1 (de) | 2014-02-24 | 2017-01-04 | Subsea 7 Limited | Unterwasserbeherbergung von unbemannten unterwasserfahrzeugen |
| KR20170043035A (ko) | 2015-10-12 | 2017-04-20 | 대우조선해양 주식회사 | 수중, 수면 및 수상 복합 검사 시스템 |
| US20180162504A1 (en) | 2016-12-13 | 2018-06-14 | Oceaneering International, Inc. | System and Method For Using A Combination Of Multiple Autonomous Vehicles With Different Abilities, Working Together As A System For Subsea Oil and Gas Exploration |
| US20190061885A1 (en) * | 2017-03-15 | 2019-02-28 | Power Docks LLC | Modular Floating Microgrid Energy Platforms |
| US20190135393A1 (en) | 2017-11-03 | 2019-05-09 | Aquaai Corporation | Modular biomimetic underwater vehicle |
| US11292563B2 (en) | 2017-12-09 | 2022-04-05 | Oceaneering International, Inc. | Methods for subsea vehicles supervised control |
| EP3501966A1 (de) | 2017-12-20 | 2019-06-26 | Xocean Limited | Unbemanntes meeresoberflächenschiff |
| US10858076B2 (en) | 2018-06-06 | 2020-12-08 | Oceaneering International, Inc. | ROV deployed buoy system |
| CN109703705A (zh) | 2018-12-26 | 2019-05-03 | 哈尔滨工程大学 | 一种半潜式无人平台 |
| US20210064034A1 (en) * | 2019-05-06 | 2021-03-04 | Florida Atlantic University Board Of Trustees | Hybrid aerial/underwater robotics system for scalable and adaptable maintenance of aquaculture fish farms |
| US11150658B2 (en) | 2019-05-06 | 2021-10-19 | Florida Atlantic University Board Of Trustees | Hybrid aerial/underwater robotics system for scalable and adaptable maintenance of aquaculture fish farms |
| CN110362118A (zh) | 2019-07-08 | 2019-10-22 | 长江大学 | 空中海面水下多机器人远程立体协同控制系统及其控制方法 |
| US20210307305A1 (en) | 2020-04-01 | 2021-10-07 | Lillian R. Fu | Nature-Inspired Design and Engineering of Autonomous Seafood Capturing, Sorting and Delivering System |
| CN112642821A (zh) | 2020-12-31 | 2021-04-13 | 华中科技大学 | 一种深远海渔场无人一体化异构清洗系统 |
| CN113859530A (zh) | 2021-11-05 | 2021-12-31 | 中国科学院力学研究所 | 一种携载auv的多栖跨介质航行器 |
Non-Patent Citations (1)
| Title |
|---|
| HAUGALOKKEN BENT O A ET AL: "Docking Stations for Net-Crawling Underwater Vehicles in Aquaculture Net Pens", OCEANS 2021: SAN DIEGO - PORTO, MTS, 20 September 2021 (2021-09-20), pages 1 - 10, XP034085899, DOI: 10.23919/OCEANS44145.2021.9705970 * |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2026012951A1 (de) * | 2024-07-09 | 2026-01-15 | Philipp Gasteiger | Mobile, modulare lande-, andock- und ladeplattform für unbemannte fahrzeuge |
| CN120171816A (zh) * | 2025-05-20 | 2025-06-20 | 国家海洋技术中心 | 无人机海上停驻平台及其无人机跟踪方法、海洋监测系统 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7661259B2 (ja) | ブイおよびブイネットワークの段階的展開 | |
| US20240068445A1 (en) | Power generating windbags and waterbags | |
| US20200385093A1 (en) | Data Retrieval and Transmitting Marine Exploration Vessel Systems | |
| US7789723B2 (en) | Unmanned ocean vehicle | |
| Ferreira et al. | Autonomous bathymetry for risk assessment with ROAZ robotic surface vehicle | |
| US20190061885A1 (en) | Modular Floating Microgrid Energy Platforms | |
| KR20230012569A (ko) | 수소 생산 및 반송 시스템 | |
| GB2511731B (en) | Autonomous Vessel Robot AI System | |
| EP4434873A1 (de) | Skalierbare, modulare und rekonfigurierbare schwimmende energieplattform zum andocken, laden und reinigen mehrerer residenter wasserfahrzeuge | |
| JP2007516124A (ja) | 自律水泳式貨物コンテナ | |
| US20200140047A1 (en) | Autonomous Submersible Offshore Marine Platform | |
| JP2023543373A (ja) | 自律航海電力補給船舶 | |
| Raimondi et al. | A innovative semi-immergible USV (SI-USV) drone for marine and lakes operations with instrumental telemetry and acoustic data acquisition capability | |
| EP2802092A1 (de) | System und Verfahren zur Untersuchung des Meeresbodens | |
| EP3501966A1 (de) | Unbemanntes meeresoberflächenschiff | |
| CA3045856A1 (en) | Recovery apparatus and allocated method | |
| AU2014219518B2 (en) | Method for operation of an unmanned ocean vessel | |
| KR20240055032A (ko) | 수소 생성, 수집 및 분배를 위한 디바이스, 시스템, 및 방법 | |
| Xu et al. | State-of-the-art underwater vehicles and technologies enabling smart ocean: Survey and classifications | |
| Martorell-Torres et al. | Xiroi ASV: a modular autonomous surface vehicle to link communications | |
| US11733698B2 (en) | Systems and methods for autonomous selection and operation of combinations of stealth and performance capabilities of a multi-mode unmanned vehicle | |
| Ishibashi et al. | The underwater recharge docking system for an autonomous underwater robot applying visual information | |
| Sun et al. | Reimagining autonomous underwater vehicle charging stations with wave energy | |
| Manley et al. | A New Approach to Multi-Domain Ocean Monitoring: Combining UAS with USVs | |
| Raimondi et al. | A innovative laterals hydro floating tilting systems for USV or surface nautical vehicles |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| RIN1 | Information on inventor provided before grant (corrected) |
Inventor name: MISKOVIC, NIKOLA Inventor name: NAD, DULA Inventor name: LONCAR, IVAN Inventor name: FERREIRA, FAUSTO Inventor name: KAPETANOVIC, NADIR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20241112 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |