EP4029651B1 - Schraubvorrichtung mit winkelgetriebe und integrierten drehmomenterfassungsmitteln - Google Patents
Schraubvorrichtung mit winkelgetriebe und integrierten drehmomenterfassungsmitteln Download PDFInfo
- Publication number
- EP4029651B1 EP4029651B1 EP21152050.7A EP21152050A EP4029651B1 EP 4029651 B1 EP4029651 B1 EP 4029651B1 EP 21152050 A EP21152050 A EP 21152050A EP 4029651 B1 EP4029651 B1 EP 4029651B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- bearing
- force
- force transducer
- torque
- radial
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B23/00—Details of, or accessories for, spanners, wrenches, screwdrivers
- B25B23/14—Arrangement of torque limiters or torque indicators in wrenches or screwdrivers
- B25B23/147—Arrangement of torque limiters or torque indicators in wrenches or screwdrivers specially adapted for electrically operated wrenches or screwdrivers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B23/00—Details of, or accessories for, spanners, wrenches, screwdrivers
- B25B23/0007—Connections or joints between tool parts
- B25B23/0028—Angular adjustment means between tool head and handle
Definitions
- the present invention relates to a screwing device with an angular gear for applying a torque to a screw partner that can be detachably connected to the screwing device, having integrated detection means for an output torque.
- Screwing devices with an angular gear are known from the state of the art, particularly in industrial screwing technology. These comprise an angular gear unit with a drive provided at one end, which can be connected to torque generating means either directly or by means of an intermediate adapter, and an output arranged at the other end and at an angle to the drive, to which a screw partner, such as a screw to be subjected to a torque, can then be attached in a suitable and detachable manner.
- a screw partner such as a screw to be subjected to a torque
- screw devices which comprise a measuring sensor which is arranged directly on an output shaft of the angle gear.
- DE 196 37 934 A1 discloses, for example, an angle screwdriver having a torque sensor which is arranged between a last bearing of the spindle or output shaft and the opposite bevel gear of an angle gear.
- the torque sensor comprises a cup-shaped housing which sits on the output shaft and rotates with it and has an integrated electronic circuit which records and processes output signals from strain gauges arranged directly on the output shaft.
- the US 5,115,701 discloses a measuring sensor which is arranged between a bearing arranged on the output side and a bevel gear arranged opposite it directly on an output shaft of the bevel gear and which cooperates with a brush contact protruding from a removable connection block of the housing for the transmission of measuring signals.
- WO 2019/206609A1 discloses a screwing device for applying a torque to a screw partner, comprising an angle gear and a measuring device.
- the object of the present invention is to provide an improved screwing device based on the known prior art, which overcomes or at least significantly reduces the aforementioned disadvantages of the prior art.
- a Screwing device with alternative means for determining and/or monitoring the torque acting on the output side on a screw partner can be provided, which enable a cost-effective and compact design of the angular gear and at the same time sufficiently reliable torque determination and/or monitoring.
- the invention also addresses other problems which will become apparent in more detail from the following description.
- the invention in a first aspect, relates to a screwing device for applying a torque to a screw partner, having an angular gear comprising a drive shaft that can be subjected to a drive torque manually or mechanically and an output shaft connected to it in a torque-transmitting manner and arranged offset by an angle for releasably contacting the screw partner, and detection means arranged in a housing of the angular gear for providing measured values for determining and/or monitoring an output torque acting on the screw partner on the output side, wherein the detection means are assigned to a bearing point of the output shaft of the angular gear and are designed such that they can detect a bearing reaction force of the output shaft in the radial and/or tangential direction and make it available for electronic signal evaluation.
- the detection means Due to the inventive design of the detection means, which are arranged or integrated in the housing of the angle gear and a Bearing point of the output shaft, and not the output shaft itself, contrary to the state of the art, a structurally simple solution is provided for the reliable provision of measured values for determining and/or monitoring the output torque acting on a screw partner on the output side.
- the design of the detection means for measuring a bearing reaction force avoids a direct arrangement of the detection means or a measuring sensor of the detection means on the output shaft and a correspondingly complex contact, thereby reducing the component complexity and minimizing the installation space requirement.
- the design for measuring a bearing reaction force in the radial and/or tangential direction also enables a structurally simple and space-saving solution for the reliable provision of measured values representing the torque applied to the output shaft.
- the design of the screw device according to the invention enables cost-effective production and simplified maintenance.
- the bearing reaction force is preferably understood to mean the force which, when torque is transmitted to the output shaft, is applied to a bearing or to a rotational axis of the output shaft, which is preferably fixed in the housing.
- the force in the radial and/or tangential direction refers to a force which is present in a plane essentially perpendicular to the rotational axis of the output shaft in the radial or tangential direction.
- the force in the radial direction is also referred to below as the radial force.
- the force in the tangential direction is also referred to below as the tangential or circumferential force.
- the above-mentioned measured values for determining and/or monitoring the output torque are preferably understood to mean the bearing reaction force recorded by the recording means or measured values or measured value signals representing this. These Measured values enable the determination and/or monitoring of the output-side torque of the screw device.
- the radial and/or tangential bearing reaction force or the radial and/or tangential bearing reaction forces are in a certain ratio to the torque applied to the output shaft and can therefore be used to measure the torque.
- the device advantageously has electrical energy supply means for such electronic interface or signal processing means, thereby providing a wireless, self-sufficient and correspondingly flexible functionality.
- the energy supply means can comprise, for example, a battery and/or integrated generator means. These can be designed in such a way that they use the rotary movements of the gear components involved that inevitably occur in the screw device according to the invention and can convert this mechanical kinetic energy into electrical operating energy for the functionalities described in an otherwise known manner.
- the bevel gear comprises a first bevel gear connected to the drive shaft, for example a bevel pinion, and a second bevel gear meshing therewith, preferably a ring gear, which in turn is connected to the output shaft.
- the Angular gear preferably has an angle of 90° between the axes of rotation of the input and output shafts.
- the second bevel gear or the one connected to the output shaft is arranged between a rotation axis of the first bevel gear and an output side of the screw device.
- This means that the second bevel gear is arranged in a side sectional view of the screw device towards the output side and thus with the output side pointing downwards below the rotation axis of the drive shaft.
- this enables installation space to be minimized in the front area of the output shaft.
- the output side preferably comprises a connecting profile that protrudes at least partially from the housing of the bevel gear, for example a connecting square, on which a connecting element such as a socket can be selectively arranged for contacting the screw partner.
- the screw device comprises two bearing points for the output shaft.
- the detection means comprise a force transducer which is assigned to a first bearing point on the drive side.
- the drive-side bearing point is understood to be the bearing point which is arranged on a section of the output shaft facing the drive shaft and preferably on the end side.
- the output-side bearing point is understood to be the bearing point which faces the output side of the output shaft.
- the force transducer of the detection means is designed in such a way that it can detect a bearing reaction force in the radial and/or tangential direction of the respective bearing point.
- the detection means or the force transducer of the detection means can also be assigned to the respective second bearing point.
- the force transducer is preferably arranged or held in the housing in a rotationally secure manner by means of appropriate connecting means, such as a pin connection, and/or by shaping.
- the force transducer can be inserted or fitted into a correspondingly designed receptacle in the housing and/or a housing cover.
- the force transducer is preferably designed to be selectively insertable in the associated receptacle in the housing. This enables the force transducer to be easily maintained and replaced.
- the force transducer preferably forms a radial or axial-radial bearing for the output shaft.
- the force transducer forms at least part of the first or second bearing point for the output shaft.
- the force transducer comprises a bearing sleeve with a central bore for providing a radial bearing for the output shaft and at least one force sensor which is designed to detect a compressive and/or tensile force applied to the force transducer in the radial and/or tangential direction as a bearing reaction force.
- the force transducer is preferably designed as part of the first bearing point.
- the first bearing point can additionally comprise an axial bearing. This preferably interacts with a central inner cone arranged at the end of the output shaft and is preferably arranged in a front housing cover.
- the axial bearing can be formed by a central spherical shape which extends inwards from the housing cover and which, when the housing cover is mounted, is mounted in the provided inner cone of the output shaft.
- the force transducer is advantageously arranged between a front cover of the housing and a second bevel gear of the bevel gear.
- the front cover of the housing is a housing cover which covers a front area of the output shaft.
- the front cover preferably covers a receptacle in which the force transducer can be inserted.
- the force transducer is also preferably arranged on the output shaft at the level of a rotation axis of the drive shaft.
- the at least one force sensor of the force transducer is preferably formed by a strain gauge attached to the force transducer.
- the force sensor can alternatively or additionally comprise a piezo element.
- the at least one force sensor is preferably arranged on a strut of the force transducer that extends radially from the bearing sleeve.
- the force transducer comprises a plurality of force sensors, ie at least two sensors, as described above, which can advantageously be arranged circumferentially distributed on the force transducer. These are preferably arranged on radially extending struts of the force transducer.
- the force transducer has a substantially disk-shaped base body with a bearing sleeve arranged centrally therein and preferably extending on both sides of the base body.
- the bearing sleeve preferably extends with its central axis perpendicular to the extension of the base body.
- the force transducer also advantageously comprises an edge section which is preferably designed concentrically to the bearing sleeve and preferably also extends on both sides of the base body.
- the bearing sleeve and the edge section can extend on both sides of the base body up to a predefined height in the respective direction.
- the disk-shaped base body and the associated edge section are preferably not completely circular in plan view, but have at least one end (material) cutout and/or a contact surface.
- the base body and the associated edge section can also preferably have two opposing cutouts and/or contact surfaces.
- the cutout(s) and/or contact surfaces of the base body are preferably designed for rotationally secure interaction with the housing for the force transducer.
- the cutouts and/or contact surfaces are advantageously designed to conform to or complement an adjacent inner surface, in particular an inner surface, of the housing receptacle for the force transducer.
- the force transducer preferably further comprises a plurality of circumferentially distributed and preferably uniformly formed cutouts, in particular bores, which are formed in the disk-shaped base body between the bearing sleeve and the edge section to form struts of the force transducer extending radially from the bearing sleeve.
- the cutouts are preferably uniform cutouts, advantageously uniform bores.
- the force transducer preferably has at least four, more preferably at least six, breakouts.
- the force transducer comprises a bearing ring for providing an axial-radial bearing for the output shaft and at least one force sensor which is designed to detect a force applied to the force transducer in the radial direction and/or tangential or circumferential direction as a bearing reaction force.
- the force transducer is preferably designed as part of the second bearing point.
- the second bearing point comprises the force transducer, which is preferably positioned on a third shoulder of the output shaft, and rolling elements which interact with it and are arranged between the force transducer and the output shaft, in particular the third shoulder, in a circumferential manner to the output shaft.
- a defined axial-radial bearing is provided by the interaction of the force transducer with the output shaft by means of the circumferentially arranged rolling elements.
- the rolling elements are guided in a rolling element raceway of the output shaft which is coaxial with the axis of rotation of the output shaft and preferably integral with the output shaft.
- the force transducer is advantageously arranged between an output-side housing cover or an output-side housing opening and the second bevel gear of the bevel gear.
- An output-side housing cover can cover a housing receptacle facing the output side, in which the force transducer can be inserted.
- the force transducer or the bearing ring is preferably and advantageously not completely circular on its outer surface.
- the bearing ring has, in plan view, at least one (material) cutout arranged in the surface and/or at least one contact surface as a positioning means, which is designed to cooperate with the housing holder for the force transducer in a rotationally secure manner.
- the at least one cutout and/or the at least one contact surface is advantageously designed to conform to or complement an adjacent inner surface, in particular an inner surface, of the housing holder for the force transducer and thus prevents a rotational movement in the housing holder when the force transducer is inserted.
- the bearing ring preferably has a guide for rolling elements formed on the inner circumference. This is advantageously a ball track for the rolling elements, which are advantageously formed as balls.
- the bearing ring On its outer surface, the bearing ring preferably has at least one applied strain gauge (DMS) structure, which forms a force sensor or is surrounded by it.
- DMS applied strain gauge
- the bearing ring can be designed as a two-part bearing ring, which comprises an inner guide ring and an outer bearing ring connected or connectable to it in a rotationally secure manner.
- the inner guide ring is advantageously designed as a hardened rolling element, in particular a ball raceway, and has a cross-section that is constant over the circumference and is essentially L-shaped in sectional view.
- the outer bearing ring has at least one force sensor on its outer surface.
- the outer bearing ring preferably also has an essentially L-shaped cross-section in sectional view and is designed in such a way that it guides the inner guide ring in a central recess in a rotationally secure manner.
- An O-ring can be arranged between the guide ring and the outer bearing ring.
- the at least one force sensor of the force transducer comprises at least one strain gauge structure running in the circumferential direction or is formed by this.
- the force transducer advantageously has several force sensors, each designed as a strain gauge structure. These can be arranged around the circumference of the bearing ring at preferably uniform intervals or distributed around the circumference.
- the respective strain gauge structures can be arranged sequentially and/or parallel to one another in the circumferential direction on the jacket surface.
- the respective force sensors formed by strain gauge structures can be arranged around the circumference of the bearing ring at preferably uniform intervals.
- the respective DMS structure preferably comprises at least one sensor layer formed directly on a surface of the bearing ring, in particular the outer surface.
- the respective DMS structure preferably forms at least one thin-film strain sensor, which is arranged on a surface of the force transducer by laser microstructuring.
- the DMS structure here comprises an insulation layer, for example made of SiO 2 and/or Al 2 O 3 , and a sensor layer arranged thereon, for example made of NiCr and/or constantan, wherein the sensor layer is produced by means of laser structuring to form conductor tracks formed parallel and/or perpendicular to the circumferential direction as a measuring grid.
- the underlying application process first involves cleaning or polishing the component surface, then applying the Insulation layer by means of chemical or physical vapor deposition, then application of the sensor layer preferably by means of physical vapor deposition, and then selective removal by means of ultra-short laser pulses (laser structuring).
- the laser structuring can be carried out on the outer curved or bent surface of the force transducer by means of a focusing optic known per se.
- a sensor adjustment or calibration of the applied thin-film sensor formed by the strain gauge structure takes place.
- the detection means comprise a processing unit for processing and/or preferably wireless signal transmission of a measured value signal corresponding to the detected output torque and/or monitoring it.
- the processing unit is electronically connected to the force transducer and designed to process and/or transmit electronic measurement signals from the force transducer.
- the processing unit can be designed to evaluate signals provided by the force transducer and to calculate and/or monitor the respective output torque based on this. This can be done, for example, based on comparison tables and/or database information. These can include, for example, measured values of the detection means determined in test series and the respective associated torque values with which the respective output torque can be calculated and/or monitored based on the measured values provided.
- the processing unit can be designed to detect a deviation from a definable target value and to issue an alarm or warning signal if the deviation is too large, for example preferably over 10%, more preferably over 5%.
- the processing unit preferably comprises a Bluetooth or WLAN interface for wireless signal transmission of measured value signals to external components that can be connected to the screwing device, for example to a computing or control unit of an associated screwing system.
- An external computing or control unit can be designed to evaluate and/or monitor the measured values provided or to document the measured values.
- the processing unit is preferably arranged in the housing on a side of the screw device associated with the output or the socket arranged thereon.
- the processing unit is arranged below the drive shaft, towards the output side. This arrangement provides the processing unit with optimum protection against external impacts.
- the processing unit is also preferably arranged in an externally accessible housing recess, which is protected by an associated housing cover.
- the invention relates to a hand-held or stationary screw system, comprising the screw device as described above and drive torque generating means connected on the drive side to the angle gear of the screw device.
- the torque generating means are preferably in the form of a manually operable or automatic screwdriver.
- a stationary screw system is preferably understood to mean a screw system which is permanently installed or built into a production unit, for example a robot cell, and can preferably be operated by an automatic control system.
- the screw system can optionally comprise an axial adapter which can be selectively arranged between the drive torque generating means and the screw device according to the invention.
- the axial adapter can provide adaptability of the screw device for connection to different torque generating devices.
- Fig. 1 shows a preferred embodiment of the screwing device 10 according to the invention for applying a torque to a screw partner 40 such as a screw.
- the screwing device 10 comprises an angle gear or angle head 1 having an output or output shaft 1b that can be detachably connected to the screwing partner 40 and a drive or drive shaft 1a (cf. Fig. 2 ), which can be manually or mechanically subjected to a drive torque, for example by torque generating means 20.
- the screwing device 10 can be connected to the torque generating means 20, preferably selectively, thereby forming the screwing system 30 according to the invention.
- the torque generating means 20 can be a commercially available tool and can apply a torque to the screwing device 10 by means of a motor, e.g. electrically or pneumatically.
- the drive torque thus applied is transmitted by the angle gear 1 in the manner described below to a shaft arranged on the output shaft 1b or connected to it, for example via an axial connection profile 9a, in particular a connecting square, connected tool, preferably a socket 9b, for screwing the screw partner 40.
- the screw device 10 is preferably intended and suitable for transmitting a torque of up to 300 Nm.
- a typical efficiency of such an angular gear is, depending on the lubrication conditions and the fine design of the gears, between approximately 85% and 95% (i.e. the ratio of an output-side torque on the output shaft 1b to an input-side torque on the input shaft 1a).
- An optional axial adapter 21 can be interposed between the torque generating means 20 and the screw device 10 that can be selectively connected thereto, which provides adaptability of the screw device 10 for connection to different torque generating means 20 and/or for different purposes.
- Fig. 2 shows a perspective view of the screw device 10 according to the invention with the housing 11 partially removed.
- Fig. 3 shows a corresponding sectional view of the device 10 without housing 11.
- the bevel gear 1 of the device comprises a first bevel gear 2a connected to the drive shaft 1a and a second bevel gear 2b meshing therewith, which is preferably designed as a ring gear and is connected to the output shaft 1b.
- the drive shaft and the output shaft are preferably arranged at an angle of 90° to one another.
- the second bevel gear 2b is preferably arranged between a rotation axis M1 (see also Fig. 5 ) of the first bevel gear 2a and an output side 3b of the screw device 10.
- the drive shaft 1a comprises connecting means 19 on the drive side, i.e. associated with the drive side 3a, for selectively contacting the torque generating means 20 or for connecting to an axial adapter 21. These can, for example, comprise projections and/or recesses in the drive shaft 1a.
- the output shaft 1b comprises a connecting profile 9a, for example a connecting square, arranged on the output side, i.e. on the output side 3b, and preferably formed integrally therewith.
- a desired tool 9b for example a socket wrench known per se, can be selectively connected to this.
- the screwing device also comprises detection means 5 arranged in the housing 11 for providing measured values for determining and/or monitoring an output torque acting on the screw partner 40 on the output side.
- the detection means 5 are assigned to a bearing point 4a (cf. Fig. 5 ) of the output shaft 1b and designed such that they can detect a bearing reaction force of the output shaft 1b in the radial direction R and/or tangential direction T and make it available for electronic signal evaluation.
- the detection means 5 comprise a force transducer 5a, which is assigned to a bearing point 4a of the output shaft 1b and is designed to detect a bearing reaction force in the radial direction R and/or tangential direction T, which are arranged or run in a plane perpendicular to the axial direction or axis of rotation M2 of the output shaft 1b.
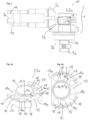
- Fig. 4a and 4b show a preferred embodiment of the force transducer 5a of the detection means 5 according to the invention.
- This comprises a preferably substantially disk-shaped base body 13 with a centrally arranged therein and preferably on both sides of the base body to a predefined height h extending bearing sleeve 16 with a central bore 12.
- the central axis M3 of the bore 12 extends perpendicular to the extension of the base body 13.
- the bore 12 is designed as a radial bearing 6 for the output shaft 1b (not shown) guided or received therein.
- the force transducer 5a also comprises an edge section 17 which is formed concentrically to the bore 12 of the bearing sleeve 16 and also extends on both sides of the base body 13.
- the edge section 17 preferably also extends up to a height h on both sides and perpendicularly from the disk-shaped base body 13.
- the base body and edge section 17 have a plan view ( Fig. 4b ) has at least one end-side (material) cutout or a contact surface 13a arranged perpendicular to the base body. This can be arranged in a rotationally secure manner in or for rotationally secure interaction with a correspondingly designed first receptacle 22a (cf. Fig. 2 , Fig. 5 ) of the housing 11.
- the contact surface 13a is linear in plan view.
- the latter can optionally have a second cutout 13b.
- the force transducer 5a further comprises a plurality of circumferentially distributed and preferably uniformly formed bores 18 between the bearing sleeve 16 and the edge section 17. Radially arranged struts 15 are formed between them.
- Several, ie at least two force sensors 14a, 14b are arranged on these, which are preferably designed as strain gauges in order to detect a pressure and/or tensile force in the radial direction R and/or tangential direction T or circumferential direction applied to the force transducer 5a and thus to the output shaft 1b connected thereto as a bearing reaction force.
- the Strain gauges 14a, 14b are designed to detect a respective pressure and/or tensile force acting in the respective radially extending struts 15 during the interaction of the output shaft 1b with the drive shaft 1a meshing therewith.
- the device 10 preferably has two bearing points 4a, 4b for the output shaft 1b, wherein the detection means 5, in particular the force transducer 5a of the detection means, is assigned to a first bearing point 4a on the drive side.
- the output shaft 1b preferably has a first shoulder 8a, by means of which the output shaft 1b is positioned at the first bearing point 4a.
- the first bearing point 4a preferably comprises a radial bearing 6 formed through the bore 12 of the bearing sleeve 16 of the force transducer 5a.
- the first bearing point 4a can have an axial bearing 7 which preferably interacts with an end-side central inner cone 8c of the output shaft 1b.
- the axial bearing 7 can be formed by a ball head 7a which extends inwards from a housing cover 11a and engages in the inner cone 8c of the output shaft 1b.
- the second bevel gear 2b preferably rests on a second shoulder 8b of the output shaft 1b.
- the second, output-side bearing 4b preferably comprises an axial-radial bearing, which is arranged between a third shoulder 8d opposite the second shoulder 8b.
- the axial-radial bearing can be designed as a rolling bearing.
- the housing 11 comprises a first receptacle 22a arranged on the front side, in which the force transducer 5a is preferably detachably inserted.
- the first receptacle 22a is adapted to an outer contour of the force transducer 5a by appropriate shaping, such that the latter is mounted in the housing 11 in a rotationally secure manner.
- the receptacle 22a is selectively closed by the housing cover 11a arranged on the front side.
- the cover 11a can be fastened to the housing 11 with appropriate connecting means such as a screw connection 23 (see also Fig. 2 ).
- the device 10 preferably comprises a processing unit 5b, which can be included in the detection means 5.
- the processing unit 5b is designed for processing and/or preferably wireless signal transmission of a measured value signal corresponding to the detected output torque and/or monitoring it and is preferably connected to the force sensor 5a via appropriate cabling (not shown).
- the processing unit 5b is arranged in a corresponding second receptacle 22b in the housing 11, preferably below the drive shaft 1a (cf. Fig. 7 ).
- the second housing receptacle 22b is designed to be selectively covered with an associated housing cover 24.
- the processing unit 5b is preferably arranged on a circuit board and preferably comprises an interface for wireless signal transmission and/or energy supply means (not shown).
- the processing unit can comprise a Bluetooth or WLAN interface for wireless signal transmission of measured value signals to external components that can be connected to the screw device, for example to a computing or control unit of an associated screw system (not shown).
- Fig. 8 and Fig. 9 show a side sectional view and an associated perspective view of a further embodiment of a screw device 10 not claimed.
- the same components are provided with the same reference numerals as in the first embodiment. In the following, particular attention is drawn to the differences compared to the previously described embodiment.
- the detection means 5 comprise a force transducer 5a', which is assigned to the second bearing point 4b of the output shaft 1b.
- the force transducer 5a' preferably comprises a bearing ring 25 for providing an axial-radial bearing for the output shaft 1b.
- the force transducer 5a' is preferably arranged in a third receptacle 22c in the housing 11 in a positionally and in particular rotationally secure manner, and is axially braced against the output shaft 1b, in particular against the third shoulder 8d of the output shaft 1b.
- the receptacle 22c can be designed to be at least partially covered with an associated housing cover (not shown), with the output shaft 1b, in particular a connecting profile 9a of the output shaft, protruding outwards on the output side 3b, i.e. from the housing 11.
- the force transducer 5a' can also be secured by separate securing means or securing means integrated in the housing 11, such as a securing ring (not shown) in the housing 11 or in the receptacle 22c.
- the first bearing point 4a is formed only by a radial bearing 6' arranged in the housing 11 and an axial bearing 7 arranged at the end of the output shaft 1b, without a force transducer assigned to this bearing point 4a.
- the lateral installation space requirement in the area of the first bearing point 4a can be further reduced and in particular narrowed.
- the force transducer 5a' is designed as part of the second bearing point 4b. This comprises the bearing ring 25, a rolling element raceway 26a which is preferably formed integrally with the output shaft 1b and which is preferably formed on or at the third shoulder 8d of the output shaft 1b, as well as rolling elements 8e arranged between the rolling element raceway and the bearing ring 25.
- the force transducer 5a' or bearing ring 25 can be designed in one piece or in multiple parts and comprises at least one force sensor 33, described in more detail below, which is designed to detect a force applied to the force transducer in the radial direction and/or tangential or circumferential direction as a bearing reaction force.
- the force transducer 5a' is designed as a two-part bearing ring and comprises an inner guide ring 25a and an outer bearing ring 25b connected thereto in a rotationally secure manner.
- the inner guide ring 25a has a preferably hardened rolling element, in particular ball track 26b.
- the outer bearing ring 25b has a central receptacle 27 into which the inner guide ring 25a is inserted or can be inserted.
- An end of the outer bearing ring 25b assigned to the output side 3b comprises an annular recess or annular groove 28 for receiving sealing means 29, in particular an O-ring (cf. Fig. 8 ), which is arranged between bearing ring 25 and output shaft 1b.
- the bearing ring 25 On its outer surface 31, the bearing ring 25 has positioning means 32a, in particular at least one recess and/or at least one projection, for interaction with a corresponding housing-side position securing element 32b, having, for example, at least one correspondingly complementarily shaped projection and/or recess, by means of which the Bearing ring 25 or the force transducer 5a' is or can be arranged in a positionally secure manner, in particular in a rotationally secure manner, in the housing 11 or in the housing receptacle 22c.
- the bearing ring 25 has at least one force sensor 33 on its outer surface 31, which is formed by or comprises at least one DMS structure 34a, 34b.
- the bearing ring 25 preferably comprises a plurality, i.e. at least two force sensors 33, which are arranged circumferentially distributed on the outer surface 31.
- a respective strain gauge structure 34a, 34b preferably comprises conductor tracks formed parallel and/or perpendicular relative to a circumferential direction U around the bearing ring 25 as a measuring grid for providing a strain gauge functionality.
- the respective strain gauge structure 34a, 34b preferably forms at least one thin-film strain sensor as a force sensor 33. This is preferably arranged or manufactured by laser microstructuring on the outer surface 31 of the force transducer 5a' or the bearing ring 25.
- the bearing ring 25 can, for example, have at least two strain gauge structures 34a, 34b running over the circumference of the outer surface 31 and spaced apart in the axial direction of the bearing ring. These can then form force sensors 33 distributed over the circumference.
- the respective strain gauge structures 34a, 34b can be electrically contacted by means of associated contacts or contact pads 35a, 35b in a contact zone 36 of the force transducer 5a' for signal evaluation.
- the contact zone 36 is preferably arranged on one side of the bearing ring 25 and thus facilitates simpler electrical contact, for example by the associated processing unit 5b of the detection means 5.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Force Measurement Appropriate To Specific Purposes (AREA)
Description
- Die vorliegende Erfindung betrifft eine Schraubvorrichtung mit einem Winkelgetriebe zum Aufbringen eines Drehmoments auf einen mit der Schraubvorrichtung lösbar verbindbaren Schraubpartner, aufweisend integrierte Erfassungsmittel für ein Abtriebsdrehmoment.
- Aus dem Stand der Technik, insbesondere der industriellen Schraubtechnik, sind Schraubvorrichtungen mit einem Winkelgetriebe bekannt. Diese umfassen eine Winkelgetriebeeinheit mit einem einends vorgesehenen Antrieb, welcher mit Drehmomenterzeugungsmitteln entweder direkt oder mittels eines zwischengeschalteten Adapters verbindbar ist, und einem anderenends und gewinkelt zum Antrieb angeordneten Abtrieb, an welchem dann ein Schraubpartner wie beispielsweise eine mit einem Drehmoment zu beaufschlagende Schraube geeignet lösbar angesetzt werden kann. Derartige Schraubvorrichtungen werden insbesondere für Schraub- bzw. Montagearbeiten eingesetzt, bei welchen der jeweilige Schraubpartner aufgrund räumlicher Einbaubedingungen nur schwer erreichbar ist.
- Aus Gründen der Qualitätssicherung oder zu Dokumentationszwecken ist es insbesondere bei der industriellen Anwendung gewünscht, ein auf den jeweiligen Schraubpartner abtriebsseitig wirkendes Abtriebsdrehmoment zu erfassen oder zu überwachen. Hierzu ist es bereits bekannt einen entsprechenden Messwertaufnehmer im Bereich einer mit dem Antrieb des Winkelgetriebes verbundenen Antriebswelle bzw. Motorwelle bereitzustellen. Eine derartige Anordnung weist allerdings den Nachteil auf, dass es zu deutlichen Messungenauigkeiten aufgrund von durch Reibung, Getriebespiel und/oder Fertigungstoleranzen begründeten Wirkungsgradverlusten kommt.
- Ebenfalls bekannt sind Schraubvorrichtungen, welche einen Messwertaufnehmer umfassen, der direkt auf einer Abtriebswelle des Winkelgetriebes angeordnet ist. Die
DE 196 37 934 A1 offenbart beispielsweise einen Winkelschrauber aufweisend einen Drehmomentmessgeber, welcher zwischen einem letzten Lager der Spindel bzw. Abtriebswelle und dem gegenüberliegenden Kegelrad eines Winkelgetriebes angeordnet ist. Der Drehmomentmessgeber umfasst ein auf der Abtriebswelle sitzendes und mit dieser mitrotierendes becherförmiges Gehäuse mit integrierter elektronischer Schaltung, welche Ausgangssignale von direkt auf der Abtriebswelle angeordneten Dehnungsmessstreifen erfasst und verarbeitet. - Die
US 5,115,701 offenbart einen Messwertaufnehmer, welcher zwischen einem abtriebsseitig angeordneten Lager und einem gegenüberliegend angeordneten Kegelrad direkt auf einer Abtriebswelle des Winkelgetriebes angeordnet ist und mit einem aus einem abnehmbaren Anschlussblock des Gehäuses herausragenden Bürstenkontakt zur Übertragung von Messsignalen zusammenwirkt.WO 2019/206609A1 offenbart eine Schraubvorrichtung zum Aufbringen eines Drehmoments auf einen Schraubpartner, aufweisend ein Winkelgetriebe sowie eine Messeinrichtung. - Derartige Schraubvorrichtungen weisen allerdings Nachteile hinsichtlich eines erhöhten Bauraumbedarfs und/oder einer erhöhten Komplexität des Aufbaus des Winkelgetriebes und des zugehörigen Messwertaufnehmers auf der Abtriebswelle auf, insbesondere auch hinsichtlich einer notwendigen Kabelführung und möglicher nachteiliger Wechselwirkungen mit der Lageranordnung des Winkelgetriebes.
- Aufgabe der vorliegenden Erfindung ist es, basierend auf den bekannten Stand der Technik eine verbesserte Schraubvorrichtung bereitzustellen, welche die vorgenannten Nachteile des Standes der Technik überwindet oder zumindest deutlich abschwächt. Insbesondere soll eine Schraubvorrichtung mit alternativen Mitteln zur Bestimmung und/oder Überwachung des abtriebsseitig auf einen Schraubpartner wirkenden Drehmoments bereitgestellt werden, welche eine kostengünstige und kompakte Bauweise des Winkelgetriebes und gleichzeitig eine hinreichend zuverlässige Drehmomentbestimmung und/oder Überwachung ermöglichen. Die Erfindung adressiert zudem weitere Probleme, welche aus der folgenden Beschreibung näher hervorgehen.
- Die zugrundeliegende Aufgabe wird durch die Schraubvorrichtung zum Aufbringen eines Drehmoments auf einen Schraubpartner mit den Merkmalen des unabhängigen Anspruchs 1 gelöst. Vorteilhafte Weiterbildungen der Erfindung sind in den Unteransprüchen beschrieben.
- In einem ersten Aspekt betrifft die Erfindung eine Schraubvorrichtung zum Aufbringen eines Drehmoments auf einen Schraubpartner, aufweisend ein Winkelgetriebe umfassend eine mit einem Antriebsdrehmoment manuell oder maschinell beaufschlagbare Antriebswelle sowie eine damit drehmomentübertragend verbundene und um einen Winkel versetzt angeordnete Abtriebswelle zur lösbaren Kontaktierung des Schraubpartners, und in einem Gehäuse des Winkelgetriebes angeordnete Erfassungsmittel zur Bereitstellung von Messwerten zur Bestimmung und/oder Überwachung eines abtriebsseitig auf den Schraubpartner wirkenden Abtriebsdrehmoments, wobei die Erfassungsmittel einer Lagerstelle der Abtriebswelle des Winkelgetriebes zugeordnet sind und derart ausgebildet sind, dass diese eine Lagerreaktionskraft der Abtriebswelle in radialer und/oder tangentialer Richtung, erfassen und zur elektronischen Signalauswertung bereitstellen können.
- Durch die erfindungsgemäße Ausbildung der Erfassungsmittel, welche im Gehäuse des Winkelgetriebes angeordnet bzw. integriert sind und einer Lagerstelle der Abtriebswelle, und nicht der Abtriebswelle selbst, zugeordnet sind, wird entgegen dem Stand der Technik eine konstruktiv einfache Lösung zur zuverlässigen Bereitstellung von Messwerten zur Bestimmung und/oder Überwachung des abtriebsseitig auf einen Schraubpartner wirkenden Abtriebsdrehmoments bereitgestellt. Hierbei wird durch die Ausbildung der Erfassungsmittel zur Messung einer Lagerreaktionskraft eine direkte Anordnung der Erfassungsmittel bzw. eines Messaufnehmers der Erfassungsmittel auf der Abtriebswelle sowie eine entsprechend aufwendige Kontaktierung vermieden, wodurch die Bauteilkomplexität reduziert und der Bauraumbedarf minimiert werden. Durch die Ausbildung zur Messung einer Lagerreaktionskraft in radialer und/oder tangentialer Richtung wird zudem eine konstruktiv einfache und bauraumsparende Lösung zur zuverlässigen Bereitstellung von das an der Abtriebswelle anliegende Drehmoment repräsentierenden Messwerten ermöglicht. Zudem ermöglicht die erfindungsgemäße Ausbildung der Schraubvorrichtung eine kostengünstige Herstellung und vereinfachte Wartung.
- Unter Lagerreaktionskraft wird vorzugsweise diejenige Kraft verstanden, welche bei einer Drehmomentenübertragung an der Abtriebswelle an einem Lager bzw. an einer vorzugsweise im Gehäuse feststehenden Drehachse der Abtriebswelle anliegt. Die Kraft in radialer und/oder tangentialer Richtungbezieht sich hierbei auf eine Kraft, welche in einer Ebene im Wesentlichen senkrecht zur Drehachse der Abtriebswelle in radialer bzw. tangentialer Richtung vorliegt. Die Kraft in radialer Richtung wird im Folgenden auch Radialkraft genannt. Die Kraft in tangentialer Richtung wird im Folgenden auch Tangential oder Umfangskraft genannt. Unter den oben genannten Messwerten zur Bestimmung und/oder Überwachung des Abtriebsdrehmoments wird vorzugsweise die von den Erfassungsmitteln erfasste Lagerreaktionskraft bzw. diese repräsentierende Messwerte oder Messwertsignale verstanden. Diese Messwerte ermöglichen die Bestimmung und/oder Überwachung des abtriebsseitigen Drehmoments der Schraubvorrichtung. Insbesondere steht die radial und/oder tangential wirkende Lagerreaktionskraft bzw. die radial und/oder tangential wirkenden Lagerreaktionskräfte in einem bestimmten Verhältnis zum an der Abtriebswelle anliegenden Drehmoment und kann bzw. können somit zur Drehmomentmessung herangezogen werden.
- Gerade die konstruktive Einfachheit der vorliegenden Erfindung zum Erzeugen eines elektronisch auswertbaren Signals ermöglicht es dann, kompakt, unter Einsatz miniaturisierter Elektronikkomponenten und kostengünstig, eine Signalauswertung, eine (elektronische) Schnittstellenfunktionalität für eine standardisierte externe Auswertbarkeit und/oder eine (auch bevorzugt drahtlose) Signalübertragung nach extern zu realisieren. Die Vorrichtung weist vorteilhafterweise elektrische Energieversorgungsmittel für derartige elektronische Schnittstell- bzw. Signalaufbereitungsmittel auf, wodurch eine drahtlose, autarke und entsprechend flexibel einsetzbare Funktionalität bereitgestellt wird. Die Energieversorgungsmittel können beispielsweise eine Batterie und/oder integrierte Generatormittel umfassen. Diese können derart ausgebildet sein, dass sie die bei der erfindungsgemäßen Schraubvorrichtung zwangsläufig auftretenden Drehbewegungen der beteiligten Getriebekomponenten nutzt und in ansonsten bekannter Weise diese mechanische Bewegungsenergie in elektrische Betriebsenergie für die beschriebenen Funktionalitäten umsetzen kann.
- Erfindungsgemäß umfasst das Winkelgetriebe ein mit der Antriebswelle verbundenes erstes Kegelrad, beispielsweise ein Kegelritzel, und ein damit kämmendes zweites Kegelrad, bevorzugt ein Tellerrad, welches wiederum mit der Abtriebswelle verbunden ist. Das Winkelgetriebe weist vorzugsweise einen Winkel von 90° zwischen den Drehachsen der Antriebs- und Abtriebswelle auf.
- Erfindungsgemäß ist das zweite bzw. das mit der Abtriebswelle verbundene Kegelrad zwischen einer Drehachse des ersten Kegelrads und einer Abtriebsseite der Schraubvorrichtung angeordnet. Dies bedeutet, dass das zweite Kegelrad in seitlicher Schnittansicht der Schraubvorrichtung hin zur Abtriebsseite und somit bei nach unten zeigender Abtriebsseite unterhalb der Drehachse der Antriebswelle angeordnet ist. Hierdurch wird neben einer effizienten Drehmomentübertragung zur Abtriebsseite eine Bauraumminimierung im stirnseitigen Bereich der Abtriebswelle ermöglicht.
- Die Abtriebsseite umfasst vorzugsweise ein wenigstens teilweise aus dem Gehäuse des Winkelgetriebes vorstehendes Verbindungsprofil, beispielsweise einen Verbindungsvierkant, auf welchen ein Verbindungselement wie beispielsweise eine Stecknuss zur Kontaktierung des Schraubpartners selektiv anordenbar ist.
- Die Schraubvorrichtung umfasst erfindungsgemäß zwei Lagerstellen für die Abtriebswelle. Die Erfassungsmittel umfassen erfindungsgemäß einen Kraftaufnehmer, welcher einer antriebsseitigen ersten Lagerstelle zugeordnet ist. Unter antriebsseitiger Lagerstelle wird die Lagerstelle verstanden, welche an einem der Antriebswelle zugewandten und vorzugsweise endseitigen Abschnitt der Abtriebswelle angeordnet ist. Unter abtriebsseitiger Lagerstelle wird die Lagerstelle verstanden, welche der Abtriebsseite der Abtriebswelle zugewandt ist.
- Der Kraftaufnehmer der Erfassungsmittel ist dabei derart ausgebildet, dass dieser eine Lagerreaktionskraft in radialer und/oder tangentialer Richtung der jeweiligen Lagerstelle erfassen kann. In einer weiteren bevorzugten Ausführungsform können die Erfassungsmittel bzw. der Kraftaufnehmer der Erfassungsmittel zusätzlich auch der jeweiligen zweiten Lagerstelle zugeordnet sein.
- Der Kraftaufnehmer ist vorzugsweise durch entsprechende Verbindungsmittel, wie beispielsweise eine Stiftverbindung, und/oder durch Formgebung rotationssicher im Gehäuse angeordnet bzw. gehalten. Der Kraftaufnehmer kann dabei in einer entsprechend ausgebildeten Aufnahme des Gehäuses und/oder eines Gehäusedeckels eingesetzt oder eingepasst sein. Der Kraftaufnehmer ist vorzugsweise selektiv einsetzbar in der zugeordneten Aufnahme des Gehäuses ausgebildet. Hierdurch werden eine einfache Wartung und Austauschbarkeit des Kraftaufnehmers ermöglicht.
- Der Kraftaufnehmer bildet vorzugsweise ein Radial- oder Axial-Radial-Lager für die Abtriebswelle aus. Hierbei bildet der Kraftaufnehmer wenigstens einen Teil der ersten oder zweiten Lagerstelle für die Abtriebswelle aus.
- In einer ersten bevorzugten Ausführungsform umfasst der Kraftaufnehmer eine Lagerhülse mit einer zentralen Bohrung zur Bereitstellung eines Radiallagers für die Abtriebswelle sowie wenigstens einen Kraftsensor, welcher dazu ausgebildet ist, eine am Kraftaufnehmer anliegende Druck- und/oder Zugkraft in radialer und/oder tangentialer Richtung als Lagerreaktionskraft zu erfassen.
- Der Kraftaufnehmer ist hierbei vorzugsweise als Teil der ersten Lagerstelle ausgebildet. Diese umfasst das durch den Kraftaufnehmer bereitgestellte Radiallager, welches vorzugsweise auf einer ersten Schulter der Abtriebswelle positioniert ist. Für eine definierte axiale Lagerung kann die erste Lagerstelle zusätzlich ein Axiallager umfassen. Dieses wirkt vorzugsweise mit einem endseitig angeordneten, zentralen Innenkonus der Abtriebswelle zusammen und ist vorzugsweise in einem stirnseitigen Gehäusedeckel angeordnet. Das Axiallager kann hierbei durch eine zentrale Kugelform gebildet sein, welche sich nach Innen vom Gehäusedeckel erstreckt und welche im montierten Zustand des Gehäusedeckels in dem vorgesehenen Innenkonus der Abtriebswelle gelagert ist.
- Der Kraftaufnehmer ist vorteilhaft zwischen einem Stirndeckel des Gehäuses und einem zweiten Kegelrad des Winkelgetriebes angeordnet. Der Stirndeckel des Gehäuses ist dabei ein Gehäusedeckel, welcher einen stirnseitigen Bereich der Abtriebswelle bedeckt. Der Stirndeckel bedeckt vorzugsweise eine Aufnahme, in welcher der Kraftaufnehmer einsetzbar ist. Weiterhin bevorzugt ist der Kraftaufnehmer an der Abtriebswelle auf Höhe einer Drehachse der Antriebswelle angeordnet.
- Der wenigstens eine Kraftsensor des Kraftaufnehmers ist vorzugsweise durch einen am Kraftaufnehmer angebrachten Dehnungsmessstreifen gebildet. Der Kraftsensor kann alternativ oder zusätzlich ein Piezoelement umfassen. Der wenigstens eine Kraftsensor ist vorzugsweise an einer sich von der Lagerhülse radial erstreckenden Strebe des Kraftaufnehmers angeordnet. In einer bevorzugten Ausführungsform umfasst der Kraftaufnehmer eine Mehrzahl von Kraftsensoren, d.h. wenigstens zwei Sensoren, wie vorgehend beschrieben, welche vorteilhaft umfangsverteilt am Kraftaufnehmer angeordnet sein können. Diese sind vorzugsweise an sich radial erstreckenden Streben des Kraftaufnehmers angeordnet.
- In einer bevorzugten Ausführungsform weist der Kraftaufnehmer einen im Wesentlichen scheibenförmigen Grundkörper mit einer darin zentral angeordneten und sich vorzugsweise beidseitig des Grundkörpers erstreckenden Lagerhülse auf. Die Lagerhülse erstreckt sich hierbei vorzugsweise mit Ihrer Mittelachse senkrecht zur Erstreckung des Grundkörpers. Der Kraftaufnehmer umfasst weiter vorteilhaft einen vorzugsweise konzentrisch zur Lagerhülse ausgebildeten und sich vorzugsweise ebenfalls beidseitig des Grundkörpers erstreckenden Randabschnitt. Die Lagerhülse und der Randabschnitt können sich beidseitig des Grundkörpers bis zu einer vordefinierten Höhe in die jeweilige Richtung erstrecken. Der scheibenförmige Grundkörper und der zugeordnete Randabschnitt sind vorzugsweise in Draufsicht nicht vollständig kreisrund ausgebildet, sondern weisen wenigstens einen endseitigen (Material-)Ausschnitt und/oder eine Anlagefläche auf. Weiter bevorzugt können der Grundkörper und der zugeordnete Randabschnitt auch zwei gegenüberliegende Ausschnitte und/oder Anlageflächen aufweisen. Der oder die Ausschnitte und/oder Anlageflächen des Grundkörpers sind vorzugsweise zum rotationssicheren Zusammenwirken mit der Aufnahme des Gehäuses für den Kraftaufnehmer ausgebildet. Hierbei sind die Ausschnitte und/oder Anlageflächen vorteilhaft zu einer jeweils anliegenden Innenfläche, insbesondere einer Innenmantelfläche, der Gehäuseaufnahme für den Kraftaufnehmer konform bzw. komplementär dazu ausgebildet.
- Der Kraftaufnehmer weist vorzugsweise weiterhin eine Mehrzahl von umfangsverteilten und vorzugsweise gleichförmig ausgebildeten Ausbrüchen, insbesondere Bohrungen, auf, welche im scheibenförmigen Grundkörper zwischen Lagerhülse und Randabschnitt zur Ausbildung von sich radial von der Lagerhülse erstreckenden Streben des Kraftaufnehmers ausgebildet sind. Die Ausbrüche sind vorzugsweise als gleichförmige Ausbrüche, vorteilhaft als gleichförmige Bohrungen ausgebildet. Der Kraftaufnehmer weist dabei vorzugsweise wenigstens vier, mehr bevorzugt wenigstens sechs Ausbrüche auf.
- In einer zweiten bevorzugten Ausführungsform umfasst der Kraftaufnehmer einen Lagerring zur Bereitstellung eines Axial-Radiallagers für die Abtriebswelle sowie wenigstens einen Kraftsensor, welcher dazu ausgebildet ist, eine am Kraftaufnehmer anliegende Kraft in Radialrichtung und/oder Tangential- bzw. Umfangsrichtung als Lagerreaktionskraft zu erfassen.
- Der Kraftaufnehmer ist hierbei vorzugsweise als Teil der zweiten Lagerstelle ausgebildet. Die zweite Lagerstelle umfasst den Kraftaufnehmer, welcher vorzugsweise auf einer dritten Schulter der Abtriebswelle positioniert ist und damit zusammenwirkende Wälzkörper, welche zwischen dem Kraftaufnehmer und der Abtriebswelle, insbesondere der dritten Schulter, umlaufend zur Abtriebswelle angeordnet sind. Eine definierte Axial-Radiallagerung wird hierbei durch ein Zusammenwirken des Kraftaufnehmers mit der Abtriebswelle mittels der umlaufend angeordneten Wälzkörper bereitgestellt. Die Wälzkörper sind dabei in einer zur Drehachse der Abtriebswelle koaxial ausgebildeten und vorzugsweise integral mit der Abtriebswelle ausgebildeten Wälzkörperlaufbahn der Abtriebswelle geführt.
- Der Kraftaufnehmer ist vorteilhaft zwischen einem abtriebsseitigen Gehäusedeckel oder einer abtriebsseitigen Gehäuseöffnung und dem zweiten Kegelrad des Winkelgetriebes angeordnet. Ein abtriebsseitiger Gehäusedeckel kann hierbei eine der Abtriebsseite zugewandte Aufnahme des Gehäuses abdecken, in welcher der Kraftaufnehmer einsetzbar ist.
- Der Kraftaufnehmer bzw. der Lagerring ist vorzugsweise und vorteilhaft an seiner äußeren Mantelfläche nicht vollständig kreisrund ausgebildet. Insbesondere weist der Lagerring in Draufsicht wenigstens einen in der Mantelfläche angeordneten (Material-)Ausschnitt und/oder wenigstens eine Anlagefläche als Positioniermittel auf, welche zum rotationssicheren Zusammenwirken mit der Aufnahme des Gehäuses für den Kraftaufnehmer ausgebildet ist. Der wenigstens eine Ausschnitt und/oder die wenigstens eine Anlagefläche ist vorteilhaft zu einer jeweils anliegenden Innenfläche, insbesondere einer Innenmantelfläche, der Gehäuseaufnahme für den Kraftaufnehmer konform bzw. komplementär dazu ausgebildet und verhindert somit eine Rotationsbewegung in der Gehäuseaufnahme im eingesetzten Zustand des Kraftaufnehmers.
- Der Lagerring weist vorzugsweise eine am Innenumfang ausgebildete Führung für Wälzkörper auf. Diese ist vorteilhaft eine Kugellaufbahn für die vorteilhaft als Kugeln ausgebildeten Wälzkörper. An seiner äußeren Mantelfläche weist der Lagerring vorzugsweise wenigstens eine aufgebrachte Dehnungsmessstreifen (DMS)-Struktur auf, welche einen Kraftsensor ausbildet oder von diesem umfasst ist.
- Der Lagerring kann als zweiteiliger Lagerring ausgebildet sein, welcher einen inneren Führungsring und einen damit rotationssicher verbundenen bzw. verbindbaren äußeren Lagerring umfasst. Der innere Führungsring ist vorteilhaft als gehärtete Wälzkörper-, insbesondere Kugellaufbahn, ausgebildet und weist in Schnittansicht einen über den Umfang gleichbleibenden und im Wesentlichen L-förmigen Querschnitt auf. Der äußere Lagerring weist an seiner äußeren Mantelfläche den wenigstens einen Kraftsensor auf. Der äußere Lagerring weist vorzugsweise ebenfalls einen im Wesentlichen L-förmigen Querschnitt in Schnittansicht auf und ist derart ausgebildet, dass dieser den inneren Führungsring in einer zentralen Ausnehmung rotationssicher aufnehmen kann. Zwischen Führungsring und äußerem Lagerring kann ein O-Ring angeordnet sein.
- Der wenigstens eine Kraftsensor des Kraftaufnehmers umfasst wenigstens eine in Umfangsrichtung verlaufende DMS-Struktur oder ist durch diese gebildet. Der Kraftaufnehmer weist vorteilhafterweise mehrere, jeweils als DMS-Struktur ausgebildete, Kraftsensoren auf. Diese können um den Umfang des Lagerrings in vorzugsweise gleichmäßigen Abständen angeordnet bzw. umfangsverteilt angeordnet sein. Die jeweiligen DMS-Strukturen können sequentiell und/oder parallel zueinander in Umfangsrichtung auf der Mantelfläche angeordnet sein. Die jeweiligen durch DMS-Strukturen gebildeten Kraftsensoren können um den Umfang des Lagerrings in vorzugsweise gleichmäßigen Abständen angeordnet sein.
- Die jeweilige DMS-Struktur umfasst vorzugsweise wenigstens eine direkt auf einer Oberfläche des Lagerrings, insbesondere der äußeren Mantelfläche, ausgebildete Sensorschicht.
- Die jeweilige DMS-Struktur bildet vorzugsweise wenigstens einen Dünnschicht-Dehnungssensor aus, welcher durch Lasermikrostrukturierung auf einer Oberfläche des Kraftaufnehmers angeordnet ist. Die DMS-Struktur umfasst hierbei eine Isolationsschicht beispielsweise aus SiO2 und/oder Al2O3, sowie eine darauf angeordnete Sensorschicht beispielsweise aus NiCr und/oder Konstantan, wobei die Sensorschicht mittels Laserstrukturierung zur Ausbildung von parallel und/oder senkrecht zur Umfangsrichtung ausgebildeten Leiterbahnen als Messgitter hergestellt ist.
- Bei dem zugrundliegenden Auftragungsverfahren erfolgt zunächst ein Reinigen bzw. Polieren der Bauteiloberfläche, danach eine Auftragung der Isolationsschicht mittels chemischer oder physikalischer Gasphasenabscheidung, anschließend eine Auftragung der Sensorschicht vorzugsweise mittels physikalischer Gasphasenabscheidung, und danach ein selektives Abtragen durch ultrakurze Laserpulse (Laserstrukturierung). Auf der äußeren gekrümmten bzw. gebogenen Mantelfläche des Kraftaufnehmers kann die Laserstrukturierung mittels einer an sich bekannten Fokussieroptik erfolgen. Nach dem Auftragungsverfahren erfolgt ein Sensorabgleich bzw. eine Kalibrierung des aufgetragenen und durch die Dehnungsmesstreifen-Struktur gebildeten Dünnschichtsensors. In einer weiteren Ausführungsform umfassen die Erfassungsmittel eine Verarbeitungseinheit zur Verarbeitung und/oder bevorzugt drahtlosen Signalübertragung eines dem erfassten Abtriebsdrehmoment entsprechenden und/oder dieses überwachenden Messwertsignals. Die Verarbeitungseinheit ist dabei mit dem Kraftaufnehmer elektronisch verbunden und zur Verarbeitung und/oder Übertragung von elektronischen Messsignalen des Kraftaufnehmers ausgebildet.
- Die Verarbeitungseinheit kann ausgebildet sein, vom Kraftaufnehmer bereitgestellte Signale auszuwerten und basierend darauf das jeweilige Abtriebsdrehmoment zu errechnen und/oder zu überwachen. Dies kann beispielsweise basierend auf Vergleichstabellen und/oder Datenbankinformationen erfolgen. Diese können beispielsweise in Versuchsreihen ermittelte Messwerte der Erfassungsmittel und jeweils zugehörige Drehmomentenwerte umfassen, mit denen basierend auf den bereitgestellten Messwerten das jeweilige Abtriebsdrehmoment errechnet bzw. berechnet und/oder überwacht werden kann. Die Verarbeitungseinheit kann hierbei ausgebildet sein, eine Abweichung von einem definierbaren Sollwert zu detektieren und bei einer zu großen Abweichung, beispielsweise von bevorzugt über 10%, mehr bevorzugt von über 5%, ein Alarm- oder Hinweissignal auszugeben.
- Die Verarbeitungseinheit umfasst vorzugsweise eine Bluetooth- oder WLAN-Schnittstelle zur drahtlosen Signalübertragung von Messwertsignalen an mit der Schraubvorrichtung verbindbare, externe Komponenten, beispielsweise an eine Rechen- oder Steuereinheit eines zugehörigen Schraubsystems. Eine externe Rechen- oder Steuereinheit kann zur Auswertung und/oder Überwachung der bereitgestellten Messwerte oder zur Dokumentation der Messwerte ausgebildet sein.
- Die Verarbeitungseinheit ist vorzugsweise im Gehäuse an einer dem Abtrieb bzw. der daran angeordneten Stecknuss zugeordneten Seite der Schraubvorrichtung angeordnet. Insbesondere ist die Verarbeitungseinheit unterhalb der Antriebswelle, hin zur Abtriebsseite, angeordnet. Die Verarbeitungseinheit ist durch diese Anordnung gegen äußere Stöße optimiert geschützt angeordnet. Die Verarbeitungseinheit ist weiterhin bevorzugt in einer extern erreichbaren Gehäuseausnahme angeordnet, welche durch einen zugehörigen Gehäusedeckel geschützt ist.
- In einem weiteren Aspekt betrifft die Erfindung ein handgehaltenes oder stationäres Schraubsystem, aufweisend die Schraubvorrichtung wie vorhergehend beschrieben sowie antriebsseitig mit dem Winkelgetriebe der Schraubvorrichtung verbundene Antriebs-Drehmomenterzeugungsmittel. Die Drehmomenterzeugungsmittel sind vorzugsweise in Form eines manuell betätigbaren oder automatischen Schraubers. Unter stationärem Schraubsystem wird vorzugsweise ein Schraubsystem verstanden, welches in einer Fertigungseinheit, beispielsweise einer Roboterzelle, fest eingebaut bzw. verbaut ist und vorzugsweise durch eine automatische Steuerung betrieben werden kann.
- Das Schraubsystem kann optional einen Axialadapter umfassen, welcher selektiv zwischen den Antriebs-Drehmomenterzeugungsmittel und der erfindungsgemäßen Schraubvorrichtung anordenbar ist. Der Axialadapter kann hierbei eine Adaptierbarkeit der Schraubvorrichtung zur Anbindung an unterschiedliche Drehmomenterzeugungsmittel bereitstellen.
- Weitere Vorteile, Merkmale und Einzelheiten der Erfindung ergeben sich aus der nachfolgenden Beschreibung bevorzugter Ausführungsbeispiele sowie anhand der Zeichnungen, diese zeigen in:
- Fig. 1:
- eine Seitenansicht des erfindungsgemäßen Schraubsystems gemäß einem bevorzugten Ausführungsbeispiel der Erfindung;
- Fig. 2:
- eine perspektivische Ansicht der erfindungsgemäßen Schraubvorrichtung mit teilweise entferntem Gehäuse;
- Fig. 3:
- eine Seitenansicht des Winkelgetriebes mit entferntem Gehäuse;
- Fig. 4a:
- eine perspektivische Ansicht einer bevorzugten Ausführungsform des erfindungsgemäßen Kraftaufnehmers der Erfassungsmittel;
- Fig. 4b:
- eine Draufsicht des Kraftaufnehmers nach
Fig. 4a ; - Fig. 5:
- eine seitliche Schnittansicht der Schraubvorrichtung;
- Fig. 6:
- eine perspektivische Ansicht der Schraubvorrichtung mit entferntem Gehäuse;
- Fig. 7:
- eine perspektivische Untersicht der erfindungsgemäßen Schraubvorrichtung;
- Fig. 8:
- eine seitliche Schnittansicht eines weiteren bevorzugten Ausführungsbeispiels der Schraubvorrichtung;
- Fig. 9:
- eine perspektivische Ansicht der Schraubvorrichtung gemäß
Fig. 8 mit entferntem Gehäuse; - Fig. 10:
- eine perspektivische Explosionsansicht einer weiteren bevorzugten Ausführungsform des erfindungsgemäßen Kraftaufnehmers;
- Fig. 11:
- eine perspektivische Ansicht des zusammengesetzten Kraftaufnehmers gemäß
Fig. 10 ; und - Fig. 12:
- eine Draufsicht auf die Umfangsfläche des Kraftaufnehmers gemäß
Fig. 10 und 11 . -
Fig. 1 zeigt eine bevorzugte Ausführungsform der erfindungsgemäßen Schraubvorrichtung 10 zum Aufbringen eines Drehmoments auf einen Schraubpartner 40 wie beispielsweise eine Schraube. - Die Schraubvorrichtung 10 umfasst ein Winkelgetriebe bzw. Winkelkopf 1 aufweisend einen mit dem Schraubpartner 40 lösbar verbindbaren Abtrieb bzw. Abtriebswelle 1b und einen Antrieb bzw. Antriebswelle 1a (vgl.
Fig. 2 ), welcher bzw. welche manuell oder maschinell mit einem Antriebsdrehmoment, beispielsweise durch Drehmomenterzeugungsmittel 20, beaufschlagbar ist. - Die Schraubvorrichtung 10 kann mit dem Drehmomenterzeugungsmittel 20 vorzugsweise selektiv verbunden werden, wodurch das erfindungsgemäße Schraubsystem 30 gebildet wird. Das Drehmomenterzeugungsmittel 20 kann ein handelsübliches Werkzeug sein und motorisch, z.B. elektrisch oder pneumatisch, ein Drehmoment in die Schraubvorrichtung 10 eintragen. Das so eingebrachte Antriebsdrehmoment wird durch das Winkelgetriebe 1 in nachfolgend beschriebener Weise auf ein an der Abtriebswelle 1b angeordnetes bzw. mit dieser bspw. über ein axiales Verbindungsprofil 9a, insbesondere einen Verbindungsvierkant, verbundenes Werkzeug, vorzugsweise eine Stecknuss 9b, zur Schraubbetätigung des Schraubpartners 40 übertragen.
- Die Schraubvorrichtung 10 ist vorzugsweise zur Übertragung eines Drehmoments von bis zu 300 Nm vorgesehen und geeignet. Ein üblicher Wirkungsgrad eines derartigen Winkelgetriebes liegt, je nach Schmierbedingungen und Fein-Ausgestaltung der Verzahnungen, zwischen ca. 85 % und 95% (d.h. das Verhältnis eines abtriebsseitigen Drehmoments an der Abtriebswelle 1b bezogen auf ein antriebsseitiges Drehmoment an der Antriebswelle 1a).
- Zwischen den Drehmomenterzeugungsmitteln 20 und der damit selektiv verbindbaren Schraubvorrichtung 10 kann ein optionaler Axialadapter 21 zwischengeschalten sein, welcher eine Adaptierbarkeit der Schraubvorrichtung 10 zur Anbindung an unterschiedliche Drehmomenterzeugungsmittel 20 und/oder für unterschiedliche Einsatzzwecke bereitstellt.
-
Fig. 2 zeigt eine Perspektivansicht der erfindungsgemäßen Schraubvorrichtung 10 mit teilweise entferntem Gehäuse 11.Fig. 3 zeigt eine zugehörige Schnittansicht der Vorrichtung 10 ohne Gehäuse 11. - Das Winkelgetriebe 1 der Vorrichtung umfasst ein mit der Antriebswelle 1a verbundenes erstes Kegelrad 2a und ein damit kämmendes zweites Kegelrad 2b, welches bevorzugt als Tellerrad ausgebildet ist und mit der Abtriebswelle 1b verbunden ist. Die Antriebswelle und die Abtriebswelle sind bevorzugt in einem Winkel von 90° zueinander angeordnet. Das zweite Kegelrad 2b ist vorzugsweise zwischen einer Drehachse M1 (vgl. auch
Fig. 5 ) des ersten Kegelrads 2a und einer Abtriebsseite 3b der Schraubvorrichtung 10 angeordnet ist. - Die Antriebswelle 1a umfasst antriebsseitige, d.h. der Antriebsseite 3a zugeordnete, Verbindungsmittel 19 zur selektiven Kontaktierung der Drehmomenterzeugungsmittel 20 oder zur Anbindung an einen Axialadapter 21. Diese können beispielsweise Vor- und/oder Rücksprünge in der Antriebswelle 1a umfassen. Die Abtriebswelle 1b ein abtriebsseitig, d.h. an der Abtriebsseite 3b, angeordnetes und vorzugsweise integral damit ausgebildetes Verbindungsprofil 9a, beispielsweise ein Verbindungsvierkant. Mit diesem kann ein gewünschtes Werkzeug 9b, beispielsweise eine an sich bekannte Stecknuss, selektiv verbunden werden.
- Die Schraubvorrichtung umfasst zudem im Gehäuse 11 angeordnete Erfassungsmittel 5 zur Bereitstellung von Messwerten zur Bestimmung und/oder Überwachung eines abtriebsseitig auf den Schraubpartner 40 wirkenden Abtriebsdrehmoments. Im vorliegenden Ausführungsbeispiel sind die Erfassungsmittel 5 einer Lagerstelle 4a (vgl.
Fig. 5 ) der Abtriebswelle 1b zugeordnet und derart ausgebildet, dass diese eine Lagerreaktionskraft der Abtriebswelle 1b in radialer Richtung R und/oder tangentialer Richtung T erfassen und zur elektronischen Signalauswertung bereitstellen können. Die Erfassungsmittel 5 umfassen dabei einen Kraftaufnehmer 5a, welcher einer Lagerstelle 4a der Abtriebswelle 1b zugeordnet ist und zur Erfassung einer Lagerreaktionskraft in radialer Richtung R und/oder tangentialer Richtung T ausgebildet ist, die in einer Ebene senkrecht zur Axialrichtung bzw. Drehachse M2 der Abtriebswelle 1bangeordnet sind bzw. verlaufen. -
Fig. 4a und 4b zeigen eine bevorzugte Ausführungsform des Kraftaufnehmers 5a der erfindungsgemäßen Erfassungsmittel 5. Dieser umfasst einen vorzugsweise im Wesentlichen scheibenförmigen Grundkörper 13 mit einer darin zentral angeordneten und sich vorzugsweise beidseitig des Grundkörpers zu einer vordefinierten Höhe h erstreckenden Lagerhülse 16 mit einer zentralen Bohrung 12. Die Mittelachse M3 der Bohrung 12 erstreckt sich dabei senkrecht zur Erstreckung des Grundkörpers 13. Die Bohrung 12 ist als Radiallager 6 für die darin geführte bzw. aufgenommene Abtriebswelle 1b (nicht gezeigt) ausgebildet. - Der Kraftaufnehmer 5a umfasst zudem einen konzentrisch zur Bohrung 12 der Lagerhülse 16 ausgebildeten und sich ebenfalls beidseitig des Grundkörpers 13 erstreckenden Randabschnitt 17. Der Randabschnitt 17 erstreckt sich vorzugsweise ebenfalls bis zu einer Höhe h beidseits und senkrecht vom scheibenförmigen Grundkörper 13. Grundkörper und Randabschnitt 17 weisen in Draufsicht (
Fig. 4b ) wenigstens einen endseitigen ausgebildeten (Material-)Ausschnitt bzw. eine senkrecht zum Grundkörper angeordnete Anlagefläche 13a auf. Diese kann zur rotationssicheren Anordnung in bzw. zum rotationssicheren Zusammenwirken mit einer entsprechend ausgebildeten ersten Aufnahme 22a (vgl.Fig. 2 ,Fig. 5 ) des Gehäuses 11 dienen. In der gezeigten Ausführungsform ist die Anlagefläche 13a in Draufsicht linear ausgebildet. Auf einer dieser gegenüberliegenden Seite des Kraftaufnehmers 5a kann dieser optional eine zweiten Ausschnitt 13b aufweisen. - Der Kraftaufnehmer 5a weist weiterhin eine Mehrzahl von umfangsverteilten und vorzugsweise gleichförmig ausgebildeten Bohrungen 18 zwischen Lagerhülse 16 und Randabschnitt 17 auf. Dazwischen sind radial angeordnete Streben 15 ausgebildet. Auf diesen sind mehrere, d.h. wenigstens zwei Kraftsensoren 14a,14b angeordnet, welche vorzugsweise als Dehnungsmessstreifen ausgebildet sind, um eine am Kraftaufnehmer 5a und somit an der damit verbundenen Abtriebswelle 1b als Lagerreaktionskraft anliegende Druck- und/oder Zugkraft in Radialrichtung R und/oder Tangentialrichtung T bzw. Umfangsrichtung zu erfassen. Insbesondere sind die Dehnungsmessstreifen 14a,14b dazu ausgebildet, eine in den jeweiligen radial verlaufenden Streben 15 wirkende jeweilige Druck und/oder Zugkraft während der Zusammenwirkung der Abtriebswelle 1b mit der damit kämmenden Antriebswelle 1a zu detektieren.
- Wie in
Fig. 5 gezeigt ist, weist die Vorrichtung 10 vorzugsweise zwei Lagerstellen 4a,4b für die Abtriebswelle 1b auf, wobei die Erfassungsmittel 5, insbesondere der Kraftaufnehmer 5a der Erfassungsmittel, einer antriebsseitigen ersten Lagerstelle 4a zugeordnet ist. Die Abtriebswelle 1b weist vorzugsweise eine erste Schulter 8a auf, mittels welcher die Abtriebswelle 1b an der ersten Lagerstelle 4a positioniert ist. Hierbei umfasst die erste Lagerstelle 4a vorzugsweise ein durch die Bohrung 12 der Lagerhülse 16 des Kraftaufnehmers 5a ausgebildetes Radiallager 6. Zusätzlich kann die erste Lagerstelle 4a ein vorzugsweise mit einem endseitigen zentralen Innenkonus 8c der Abtriebswelle 1b zusammenwirkendes Axiallager 7 aufweisen. Das Axiallager 7 kann durch einen Kugelkopf 7a gebildet sein, welcher sich von einem Gehäusedeckel 11a nach Innen erstreckt und in den Innenkonus 8c der Abtriebswelle 1b eingreift. - Das zweite Kegelrad 2b liegt vorzugsweise an einer zweiten Schulter 8b der Abtriebswelle 1b an. Die zweite, abtriebsseitige Lagerstelle 4b umfasst vorzugsweise ein Axial-Radiallager, welches zwischen einer der zweiten Schulter 8b gegenüberliegenden dritten Schulter 8d angeordnet ist. Das Axial-Radiallager kann hierbei als Wälzlager ausgebildet sein.
- Das Gehäuse 11 umfasst eine stirnseitige angeordnete erste Aufnahme 22a, in welcher der Kraftaufnehmer 5a vorzugsweise lösbar eingesetzt ist. Die erste Aufnahme 22a ist dabei durch entsprechende Formgebung an eine Außenkontur der Kraftaufnehmers 5a angepasst, derart, dass letzterer rotationssicher im Gehäuse 11 gelagert ist. Die Aufnahme 22a ist durch den stirnseitig angeordneten Gehäusedeckel 11a selektiv verschließbar. Hierzu kann der Deckel 11a mit entsprechenden Verbindungsmittel wie beispielsweise einer Schraubenverbindung 23 am Gehäuse 11 befestigbar sein (vgl. auch
Fig. 2 ). - Wie in
Fig. 6 gezeigt, umfasst die Vorrichtung 10 vorzugsweise eine Verarbeitungseinheit 5b, welche von den Erfassungsmitteln 5 umfasst sein kann. Die Verarbeitungseinheit 5b ist zur Verarbeitung und/oder bevorzugt drahtlosen Signalübertragung eines dem erfassten Abtriebsdrehmoment entsprechenden und/oder dieses überwachenden Messwertsignals ausgebildet und vorzugsweise mit dem Kraftaufnehmer 5a über entsprechende Verkabelung (nicht gezeigt) verbunden. Die Verarbeitungseinheit 5b ist dabei in einer entsprechenden zweiten Aufnahme 22b im Gehäuse 11, vorzugsweise unterhalb der Antriebswelle 1a, angeordnet (vgl.Fig. 7 ). Die zweite Gehäuseaufnahme 22b ist selektiv mit einem zugehörigen Gehäusedeckel 24 abdeckbar ausgebildet. - Die Verarbeitungseinheit 5b ist vorzugsweise auf einer Platine angeordnet und umfasst vorzugsweise eine Schnittstelle zur drahtlosen Signalübertragung und/oder Energieversorgungsmittel (nicht gezeigt). Insbesondere kann die Verarbeitungseinheit eine Bluetooth- oder WLAN-Schnittstelle zur drahtlosen Signalübertragung von Messwertsignalen an mit der Schraubvorrichtung verbindbare, externe Komponenten, beispielsweise an eine Rechen- oder Steuereinheit eines zugehörigen Schraubsystems (nicht gezeigt) umfassen.
-
Fig. 8 und Fig. 9 zeigen ein seitliche Schnittansicht und eine zugehörige perspektivische Ansicht eines weiteren Ausführungsbeispiels einer nicht beanspruchten Schraubvorrichtung 10. Gleiche Bauteile sind hierbei mit gleichen Bezugszeichen wie beim ersten Ausführungsbeispiel versehen. Im Folgenden soll insbesondere auf die Unterschiede gegenüber dem zuvor beschriebenen Ausführungsbeispiel eingegangen werden. - Die Erfassungsmittel 5 gemäß diesem Ausführungsbeispiel umfassen einen Kraftaufnehmer 5a', welcher der zweiten Lagerstelle 4b der Abtriebswelle 1b zugeordnet ist. Der Kraftaufnehmer 5a' umfasst hierbei vorzugsweise einen Lagerring 25 zur Bereitstellung eines Axial-Radiallagers für die Abtriebswelle 1b. Der Kraftaufnehmer 5a' ist hierbei vorzugsweise in einer dritten Aufnahme 22c im Gehäuse 11 positions- und insbesondere rotationssicher angeordnet, sowie gegen die Abtriebswelle 1b, insbesondere gegen die dritte Schulter 8d der Abtriebswelle 1b, axial verspannt. Die Aufnahme 22c kann mit einer zugehörigen Gehäuseabdeckung (nicht gezeigt) wenigstens teilweise abdeckbar ausgebildet sein, wobei die Abtriebswelle 1b, insbesondere ein Verbindungsprofil 9a der Abtriebswelle, an der Abtriebsseite 3b nach Außen, d.h. aus dem Gehäuse 11, hervorragt. Der Kraftaufnehmer 5a' kann auch durch separate oder im Gehäuse 11 integrierte Sicherungsmittel wie beispielsweise einem Sicherungsring (nicht gezeigt) im Gehäuse 11 bzw. in der Aufnahme 22c gesichert sein.
- Die erste Lagerstelle 4a ist in diesem Ausführungsbeispiel lediglich durch ein im Gehäuse 11 angeordnetes Radiallager 6' und ein endseitig der Abtriebswelle 1b angeordnetes Axiallager 7 ausgebildet, ohne einen dieser Lagerstelle 4a zugeordneten Kraftaufnehmer. Hierdurch kann der seitliche Bauraumbedarf im Bereich der ersten Lagerstelle 4a weiter reduziert und insbesondere verschmälert werden.
- Mit Verweis auf die
Fig. 10-12 wird im Folgenden eine bevorzugte Ausführungsform des Kraftaufnehmers 5a` beschrieben. - Der Kraftaufnehmer 5a'ist als Teil der zweiten Lagerstelle 4b ausgebildet. Diese umfasst hierbei den Lagerring 25, eine mit der Abtriebswelle 1b vorzugsweise integral ausgebildete Wälzkörperlaufbahn 26a, welche vorzugsweise auf bzw. an der dritten Schulter 8d der Abtriebswelle 1b ausgebildet ist, sowie zwischen der Wälzkörperlaufbahn und dem Lagerring 25 angeordnete Wälzkörper 8e.
- Der Kraftaufnehmer 5a' bzw. Lagerring 25 kann einteilig oder mehrteilig ausgebildet sein und umfasst wenigstens einen unten näher beschriebenen Kraftsensor 33, welcher dazu ausgebildet ist, eine am Kraftaufnehmer anliegende Kraft in Radialrichtung und/oder Tangential- bzw. Umfangsrichtung als Lagerreaktionskraft zu erfassen.
- Im gezeigten Ausführungsbeispiel ist der Kraftaufnehmer 5a' als zweiteiliger Lagerring ausgebildet und umfasst einen inneren Führungsring 25a und einen damit rotationssicher verbundenen äußeren Lagerring 25b. Der innere Führungsring 25a weist eine vorzugsweise gehärtete Wälzkörper-, insbesondere Kugellaufbahn 26b auf. Der äußere Lagerring 25b weist eine zentrale Aufnahme 27 auf, in welche der innere Führungsring 25a eingesetzt bzw. einsetzbar ist. Ein der Abtriebsseite 3b zugeordnetes Ende des äußeren Lagerrings 25b umfasst eine ringförmige Ausnehmung bzw. Ringnut 28 zur Aufnahme von Dichtmitteln 29, insbesondere eines O-Rings (vgl.
Fig. 8 ), welcher zwischen Lagerring 25 und Abtriebswelle 1b angeordnet ist. - An seiner äußeren Mantelfläche 31 weist der Lagerring 25 Positioniermittel 32a auf, insbesondere wenigstens eine Aussparung und/oder wenigstens einen Vorsprung, zum Zusammenwirken mit einem entsprechenden gehäuseseitigen Positionssicherungselement 32b, aufweisend beispielsweise wenigstens einen entsprechend komplementär ausgeformten Vorsprung und/oder Rücksprung, mittels welcher der Lagerring 25 bzw. der Kraftaufnehmer 5a' im Gehäuse 11 bzw. in der Gehäuseaufnahme 22c positionssicher, insbesondere rotationssicher, angeordnet bzw. anordenbar ist.
- Der Lagerring 25 weist an seiner äußeren Mantelfläche 31 wenigstens einen Kraftsensor 33 auf, welcher durch wenigstens eine DMS-Struktur 34a,34b gebildet ist bzw. diese umfasst. Vorzugsweise umfasst der Lagerring 25 eine Mehrzahl, d.h. wenigstens zwei Kraftsensoren 33, welche umfangsverteilt auf der äußeren Mantelfläche 31 angeordnet sind.
- Eine jeweilige DMS-Struktur 34a,34b umfasst hierbei vorzugsweise relativ zu einer Umfangsrichtung U um den Lagerring 25 parallel und/oder senkrecht ausgebildete Leiterbahnen als Messgitter zur Bereitstellung einer DMS-Funktionalität. Die jeweilige DMS-Struktur 34a,34b bildet vorzugsweise wenigstens einen Dünnschicht-Dehnungssensor als Kraftsensor 33 aus. Dieser ist vorzugsweise durch Lasermikrostrukturierung auf der äußeren Mantelfläche 31 des Kraftaufnehmers 5a' bzw. des Lagerring 25 angeordnet bzw. hergestellt.
- Wie in
Fig. 11, 12 gezeigt, kann der Lagerring 25 beispielsweise wenigstens zwei über den Umfang der äußeren Mantelfläche 31 verlaufende und in Axialrichtung des Lagerrings beabstandete DMS-Strukturen 34a,34b aufweisen. Diese können dann jeweils über den Umfang verteilte Kraftsensoren 33 ausbilden. Die jeweiligen DMS-Strukturen 34a,34b können mittels zugeordneter Kontakte bzw. Kontaktpads 35a,35b in einer Kontaktierungszone 36 des Kraftaufnehmers 5a' zur Signalauswertung elektrisch kontaktiert werden. Die Kontaktierungszone 36 ist vorzugsweise einseitig des Lagerrings 25 angeordnet und erleichtert somit eine einfachere elektrische Kontaktierung beispielsweise durch die zugeordnete Verarbeitungseinheit 5b der Erfassungsmittel 5. - Die oben beschriebenen Ausführungsformen sind lediglich beispielhaft, wobei die Erfindung keineswegs auf die in den Figuren gezeigten Ausführungsformen beschränkt ist. Auch umfasst die Erfindung weitere, nicht gezeigte Ausführungsformen sowie insbesondere eine Kombination der beschriebenen Ausführungsformen.
-
- 1
- Winkelgetriebe
- 1a
- Antriebswelle
- 1b
- Abtriebswelle
- 2a
- erstes Kegelrad
- 2b
- zweites Kegelrad
- 3a
- Antriebsseite
- 3b
- Abtriebsseite
- 4a
- erste Lagerstelle
- 4b
- zweite Lagerstelle
- 5
- Erfassungsmittel
- 5a,5a`
- Kraftaufnehmer
- 5b
- Verarbeitungseinheit
- 6,6'
- Radiallager
- 7
- Axiallager
- 7a
- Kugelkopf
- 8a
- erste Schulter
- 8b
- zweite Schulter
- 8c
- Innenkonus
- 8d
- dritte Schulter
- 8e
- Wälzkörper
- 9a
- Verbindungsprofil (Vierkant)
- 9b
- Werkzeug (Stecknuss)
- 10
- Schraubvorrichtung
- 11
- Gehäuse
- 11a
- Gehäusedeckel
- 12
- zentrale Bohrung
- 13
- Grundkörper
- 13a,b
- Ausschnitt/Anlagefläche
- 14a,b
- Dehnungsmessstreifen
- 15
- Streben
- 16
- Lagerhülse
- 17
- Randabschnitt
- 18
- Ausbrüche, Bohrungen
- 19
- Verbindungsmittel Antriebswelle
- 20
- Antriebs-Drehmomenterzeugungsmittel
- 21
- Axialadapter
- 22a,b,c
- Aufnahme Gehäuse
- 23
- Schraubverbindung
- 24
- Gehäusedeckel
- 25
- Lagerring
- 25a
- innerer Führungsring
- 25b
- äußerer Lagerring
- 26a,b
- Wälzkörperlaufbahn
- 27
- Aufnahme
- 28
- Ringnut
- 29
- Dichtmittel (O-Ring)
- 30
- Schraubsystem
- 31
- äußere Mantelfläche
- 32a
- Positioniermittel
- 32b
- Positionssicherungsmittel
- 33
- Kraftsensor
- 34a,b
- DMS Struktur
- 35a,35b
- Kontakte
- 36
- Kontaktierungszone
- 40
- Schaubpartner
- M1
- Drehachse Antriebswelle
- M2
- Drehachse Abtriebswelle
- M3
- Mittelachse Bohrung Kraftaufnehmer
- h
- Höhenerstreckung
- R
- radiale Richtung
- T
- tangentiale Richtung
- U
- Umfangsrichtung
Claims (13)
- Schraubvorrichtung (10) zum Aufbringen eines Drehmoments auf einen Schraubpartner (40), aufweisendein Winkelgetriebe (1) umfassend eine mit einem Antriebsdrehmoment manuell oder maschinell beaufschlagbare Antriebswelle (1a) sowie eine damit drehmomentübertragend verbundene und um einen Winkel versetzt angeordnete Abtriebswelle (1b) zur lösbaren Kontaktierung des Schraubpartners (40), undin einem Gehäuse (11) des Winkelgetriebes (1) angeordnete Erfassungsmittel (5) zur Bereitstellung von Messwerten zur Bestimmung und/oder Überwachung eines abtriebsseitig auf den Schraubpartner (40) wirkenden Abtriebsdrehmoments,wobei die Erfassungsmittel (5) einer Lagerstelle der Abtriebswelle (1b) zugeordnet sind und derart ausgebildet sind, dass diese eine Lagerreaktionskraft der Abtriebswelle (1b) in radialer und/oder tangentialer Richtung (R,T), erfassen und zur elektronischen Signalauswertung bereitstellen können, und wobei das Winkelgetriebe (1) ein mit der Antriebswelle (1a) verbundenes erstes Kegelrad (2a) und ein damit kämmendes zweites Kegelrad (2b) aufweist, welches mit der Abtriebswelle (1b) verbunden ist, wobei das zweite Kegelrad (2b) zwischen einer Drehachse (M1) des ersten Kegelrads (2a) und einer Abtriebsseite (3b) der Schraubvorrichtung (10) angeordnet ist, und dass die Vorrichtung zwei Lagerstellen (4a,4b) für die Abtriebswelle (1b) aufweist, wobei die Erfassungsmittel (5) einen Kraftaufnehmer (5a,5a') umfassen, welcher einer antriebsseitigen ersten Lagerstelle (4a) zugeordnet ist.
- Vorrichtung nach Anspruch 1, dadurch gekennzeichnet, dass das erste Kegelrad (2a) ein Kegelritzel, und das zweites Kegelrad (2b) ein Tellerrad, ist.
- Vorrichtung nach Anspruch 1, dadurch gekennzeichnet, dass der Kraftaufnehmer (5a,5a') durch Verbindungsmittel (13a,13b,32a) und/oder durch Formgebung rotationssicher im Gehäuse (11) angeordnet ist und vorzugsweise ein Radial- oder Axial-Radial-Lager für die Abtriebswelle (1b) ausbildet.
- Vorrichtung nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass der Kraftaufnehmer (5a) eine Lagerhülse (16) mit einer zentralen Bohrung (12) zur Bereitstellung eines Radiallagers (6) für die Abtriebswelle (1b) sowie wenigstens einen Kraftsensor umfasst, welcher dazu ausgebildet ist, eine am Kraftaufnehmer (5a) anliegende Druck- und/oder Zugkraft in Radialrichtung (R) und/oder Tangentialrichtung (T) als Lagerreaktionskraft zu erfassen.
- Vorrichtung nach Anspruch 4, dadurch gekennzeichnet, dass der Kraftaufnehmer (5a) mehrere Kraftsensoren aufweist, welche durch am Kraftaufnehmer (5a) angebrachte Dehnungsmessstreifen (14a,14b) gebildet sind, welche vorzugsweise an sich radial erstreckenden Streben (15) des Kraftaufnehmers (5a) angeordnet sind.
- Vorrichtung nach Anspruch 4 oder 5, dadurch gekennzeichnet, dass der Kraftaufnehmer (5a) einen im Wesentlichen scheibenförmigen Grundkörper (13) mit einer darin zentral angeordneten und sich beidseitig des Grundkörpers erstreckenden Lagerhülse (16), sowie einen konzentrisch zur Lagerhülse (16) ausgebildeten und beidseitig des Grundkörpers erstreckenden Randabschnitt (17) aufweist.
- Vorrichtung nach Anspruch 6, dadurch gekennzeichnet, dass im scheibenförmigen Grundkörper (13) zwischen Lagerhülse (16) und Randabschnitt (17) eine Mehrzahl von umfangsverteilten und vorzugsweise gleichförmig ausgebildeten Ausbrüchen (18), insbesondere gleichförmige Bohrungen, zur Ausbildung von sich radial erstreckenden Streben (15) des Kraftaufnehmers (5a) ausgebildet ist.
- Vorrichtung nach Anspruch 6 oder 7, dadurch gekennzeichnet, dass der Kraftaufnehmer (5a') einen Lagerring (25) zur Bereitstellung eines Axial-Radiallagers für die Abtriebswelle (1b) sowie wenigstens einen Kraftsensor umfasst, welcher dazu ausgebildet ist, eine am Kraftaufnehmer (5a') anliegende Kraft in Radialrichtung (R) und/oder Tangentialrichtung (U) als Lagerreaktionskraft zu erfassen.
- Vorrichtung nach Anspruch 8, dadurch gekennzeichnet, dass der Lagerring (25) eine am Innenumfang ausgebildete Laufbahn (26) für Wälzkörper (8e) und an einer äußeren Mantelfläche (31) des Lagerrings aufgebrachte DMS-Struktur (34a,34b) zur Ausbildung eines Kraftsensors (33) umfasst.
- Vorrichtung nach Anspruch 8 oder 9, dadurch gekennzeichnet, dass der Kraftsensor (33) wenigstens eine in Umfangsrichtung verlaufende DMS-Struktur (34a,34b) umfasst oder durch diese gebildet ist, wobei die DMS-Struktur (34a,34b) wenigstens eine direkt auf der äußeren Mantelfläche (31) des Lagerrings (25) ausgebildete Sensorschicht aufweist.
- Vorrichtung nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass die Erfassungsmittel (5) eine Verarbeitungseinheit (5b) zur Signalaufbereitung und bevorzugt drahtlosen Signalübertragung eines dem erfassten Abtriebsdrehmoment entsprechenden und/oder dieses überwachenden Messwertsignals aufweisen.
- Vorrichtung nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass die Erfassungsmittel (5) elektrische Energieversorgungsmittel, insbesondere eine Batterie oder der Vorrichtung zugeordnete Generatormittel, aufweisen.
- Handgehaltenes oder stationäres Schraubsystem (30), aufweisend die Schraubvorrichtung (10) nach einem der Ansprüche 1 bis 12 sowie antriebsseitig mit den Winkelgetriebe (1) verbundene Antriebs-Drehmomenterzeugungsmittel (20).
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| ES21152050T ES3011108T3 (en) | 2021-01-18 | 2021-01-18 | Screwing device with angular gear and integrated torque detection means |
| EP21152050.7A EP4029651B1 (de) | 2021-01-18 | 2021-01-18 | Schraubvorrichtung mit winkelgetriebe und integrierten drehmomenterfassungsmitteln |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP21152050.7A EP4029651B1 (de) | 2021-01-18 | 2021-01-18 | Schraubvorrichtung mit winkelgetriebe und integrierten drehmomenterfassungsmitteln |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP4029651A1 EP4029651A1 (de) | 2022-07-20 |
| EP4029651B1 true EP4029651B1 (de) | 2024-11-06 |
Family
ID=74186610
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP21152050.7A Active EP4029651B1 (de) | 2021-01-18 | 2021-01-18 | Schraubvorrichtung mit winkelgetriebe und integrierten drehmomenterfassungsmitteln |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP4029651B1 (de) |
| ES (1) | ES3011108T3 (de) |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10250340B4 (de) * | 2002-10-29 | 2016-06-09 | Schaeffler Technologies AG & Co. KG | Als Wälzlager ausgebildetes Kraftmeßlager |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5115701A (en) | 1990-09-26 | 1992-05-26 | Gse, Inc. | Drive mechanism and strain gauge mounting for a nutrunner appliance |
| DE19637934A1 (de) | 1996-09-17 | 1998-03-26 | Psm Drucklufttechnik Vertrieb | Winkelschrauber mit eingebautem Drehmomentgeber |
| DE10254814A1 (de) * | 2002-11-23 | 2004-06-03 | Fag Kugelfischer Ag | Kraftmesslager |
| SE542008C2 (en) * | 2018-04-26 | 2020-02-11 | Atlas Copco Ind Technique Ab | Electric power tool for tightening screw joints |
| DE202019101333U1 (de) * | 2019-03-08 | 2019-06-06 | SWEDEX GmbH Industrieprodukte | Drehmomentschrauberanordnung zum Betrieb einer solchen Drehmomentschrauberanordnung |
-
2021
- 2021-01-18 EP EP21152050.7A patent/EP4029651B1/de active Active
- 2021-01-18 ES ES21152050T patent/ES3011108T3/es active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10250340B4 (de) * | 2002-10-29 | 2016-06-09 | Schaeffler Technologies AG & Co. KG | Als Wälzlager ausgebildetes Kraftmeßlager |
Also Published As
| Publication number | Publication date |
|---|---|
| ES3011108T3 (en) | 2025-04-07 |
| EP4029651A1 (de) | 2022-07-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3771519B1 (de) | Schraubvorrichtung mit integrierten erfassungsmitteln | |
| DE102016010551B3 (de) | Drehmomentsensor mit radialelastischer Momentübertragung | |
| EP3507582B1 (de) | Drehmomentsensor mit dichtungsmembran | |
| EP3388199A1 (de) | Schraubvorrichtung sowie handgehaltenes schraubsystem | |
| DE8414766U1 (de) | Schrauber | |
| EP0459948A2 (de) | Kraft-Dehnungs-Körperschall-Aufnehmer-Kombination | |
| DE102010040217A1 (de) | Betätigungsvorrichtung zum Kalibrieren von Drehmoment-Drehwinkelschlüsseln | |
| EP0452556A2 (de) | Messwertaufnehmer für eine elektromotorisch angetriebene Servolenkung | |
| EP3820649B1 (de) | Drehmomentschrauberanordnung und verfahren zum betrieb einer solchen drehmomentschrauberanordnung | |
| EP4029651B1 (de) | Schraubvorrichtung mit winkelgetriebe und integrierten drehmomenterfassungsmitteln | |
| DE102021109860B3 (de) | Schraubenklemmkraftwandler für Schraubenfestziehvorgang | |
| DE10251387B4 (de) | Elektrische Preßvorrichtung | |
| EP4069409B1 (de) | Rührgerät | |
| EP0935129A2 (de) | Mehrkomponenten-Messrad | |
| EP3153280B1 (de) | Werkzeug mit universalschnittstelle für eine abtriebsschnittstelle | |
| DE102016010546B3 (de) | Drehmomentsensor mit axialem Anschlagelement | |
| AT528401B1 (de) | Trommelbremsentestvorrichtung und Verfahren zur Montage | |
| DE102007037969B4 (de) | Werkzeugvorrichtung | |
| EP1287952A1 (de) | Drehdurchführung endseitig eines Roboterarms | |
| EP3120973B1 (de) | Handwerkzeug mit zwei abtrieben | |
| DE102018100137A1 (de) | Antriebsstrang-Prüfeinrichtung mit konformem Bund | |
| EP1825968B1 (de) | Kippbare Seilantriebseinheit für Kryomanipulatoren | |
| DE102015213760A1 (de) | Werkzeug mit einem universellen, messenden Abtriebselement und Abtriebselement | |
| EP4019793A1 (de) | Passelement zur formschlüssigen verbindung zweier körper | |
| WO2025120044A1 (de) | Spannungswellengetriebe |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20230120 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: B25B 23/147 20060101ALI20240528BHEP Ipc: B25B 23/00 20060101AFI20240528BHEP |
|
| INTG | Intention to grant announced |
Effective date: 20240611 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502021005674 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20241106 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 3011108 Country of ref document: ES Kind code of ref document: T3 Effective date: 20250407 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250306 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241106 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250306 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241106 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241106 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241106 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250206 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241106 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250207 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 20250417 Year of fee payment: 5 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241106 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250206 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241106 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241106 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241106 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241106 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241106 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241106 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241106 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502021005674 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250118 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241106 |
|
| 26N | No opposition filed |
Effective date: 20250807 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250131 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250118 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 20260121 Year of fee payment: 6 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20260122 Year of fee payment: 6 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20260217 Year of fee payment: 6 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20260126 Year of fee payment: 6 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: BE Payment date: 20260121 Year of fee payment: 6 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20260123 Year of fee payment: 6 |