EP3897936B1 - Appareil de fabrication pour la fabrication d'une composition a partir d'un mélange de formulations - Google Patents
Appareil de fabrication pour la fabrication d'une composition a partir d'un mélange de formulations Download PDFInfo
- Publication number
- EP3897936B1 EP3897936B1 EP19824335.4A EP19824335A EP3897936B1 EP 3897936 B1 EP3897936 B1 EP 3897936B1 EP 19824335 A EP19824335 A EP 19824335A EP 3897936 B1 EP3897936 B1 EP 3897936B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- coupling
- capsule
- reception
- manufacturing
- actuating
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000000203 mixture Substances 0.000 title claims description 78
- 238000004519 manufacturing process Methods 0.000 title claims description 73
- 238000009472 formulation Methods 0.000 title claims description 32
- 239000002775 capsule Substances 0.000 claims description 191
- 238000002156 mixing Methods 0.000 claims description 129
- 230000008878 coupling Effects 0.000 claims description 94
- 238000010168 coupling process Methods 0.000 claims description 94
- 238000005859 coupling reaction Methods 0.000 claims description 94
- 230000007246 mechanism Effects 0.000 claims description 94
- 238000003780 insertion Methods 0.000 claims description 71
- 230000037431 insertion Effects 0.000 claims description 71
- 239000002537 cosmetic Substances 0.000 claims description 15
- 230000000903 blocking effect Effects 0.000 claims description 6
- 238000012546 transfer Methods 0.000 claims description 6
- 238000010438 heat treatment Methods 0.000 description 58
- 230000014759 maintenance of location Effects 0.000 description 50
- 230000033001 locomotion Effects 0.000 description 37
- 238000000034 method Methods 0.000 description 28
- 210000003811 finger Anatomy 0.000 description 21
- 230000007935 neutral effect Effects 0.000 description 19
- 239000006071 cream Substances 0.000 description 17
- 239000012071 phase Substances 0.000 description 17
- 230000008569 process Effects 0.000 description 15
- 230000036961 partial effect Effects 0.000 description 14
- 238000013519 translation Methods 0.000 description 14
- 238000001816 cooling Methods 0.000 description 10
- 238000009792 diffusion process Methods 0.000 description 9
- 230000001681 protective effect Effects 0.000 description 8
- 238000013461 design Methods 0.000 description 7
- 230000000694 effects Effects 0.000 description 7
- 230000000295 complement effect Effects 0.000 description 6
- 239000000839 emulsion Substances 0.000 description 6
- 238000002360 preparation method Methods 0.000 description 6
- 238000007906 compression Methods 0.000 description 5
- 230000006835 compression Effects 0.000 description 5
- 230000006870 function Effects 0.000 description 5
- 238000012423 maintenance Methods 0.000 description 5
- 238000005192 partition Methods 0.000 description 5
- 230000005355 Hall effect Effects 0.000 description 4
- 230000008901 benefit Effects 0.000 description 4
- 239000008346 aqueous phase Substances 0.000 description 3
- 230000007423 decrease Effects 0.000 description 3
- 238000006073 displacement reaction Methods 0.000 description 3
- 238000004898 kneading Methods 0.000 description 3
- 239000007788 liquid Substances 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 230000002829 reductive effect Effects 0.000 description 3
- 238000000926 separation method Methods 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 230000004913 activation Effects 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 229920001971 elastomer Polymers 0.000 description 2
- 239000000806 elastomer Substances 0.000 description 2
- 238000000605 extraction Methods 0.000 description 2
- 230000000670 limiting effect Effects 0.000 description 2
- 230000013011 mating Effects 0.000 description 2
- 238000013508 migration Methods 0.000 description 2
- 230000005012 migration Effects 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 238000005096 rolling process Methods 0.000 description 2
- 229910052709 silver Inorganic materials 0.000 description 2
- 238000003860 storage Methods 0.000 description 2
- 238000012549 training Methods 0.000 description 2
- 230000000007 visual effect Effects 0.000 description 2
- 241001071861 Lethrinus genivittatus Species 0.000 description 1
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 description 1
- 230000003213 activating effect Effects 0.000 description 1
- 239000013543 active substance Substances 0.000 description 1
- 230000006978 adaptation Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000000712 assembly Effects 0.000 description 1
- 238000000429 assembly Methods 0.000 description 1
- 230000003796 beauty Effects 0.000 description 1
- 238000009529 body temperature measurement Methods 0.000 description 1
- 235000021152 breakfast Nutrition 0.000 description 1
- 210000000080 chela (arthropods) Anatomy 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 125000004122 cyclic group Chemical group 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 239000013013 elastic material Substances 0.000 description 1
- 238000005485 electric heating Methods 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 229940082150 encore Drugs 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 238000000265 homogenisation Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000010409 ironing Methods 0.000 description 1
- 229910001416 lithium ion Inorganic materials 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000004806 packaging method and process Methods 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 239000000825 pharmaceutical preparation Substances 0.000 description 1
- 229940127557 pharmaceutical product Drugs 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000000284 resting effect Effects 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 210000003813 thumb Anatomy 0.000 description 1
- 238000012795 verification Methods 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images

















Classifications
-
- A—HUMAN NECESSITIES
- A45—HAND OR TRAVELLING ARTICLES
- A45D—HAIRDRESSING OR SHAVING EQUIPMENT; EQUIPMENT FOR COSMETICS OR COSMETIC TREATMENTS, e.g. FOR MANICURING OR PEDICURING
- A45D34/00—Containers or accessories specially adapted for handling liquid toiletry or cosmetic substances, e.g. perfumes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F33/00—Other mixers; Mixing plants; Combinations of mixers
- B01F33/50—Movable or transportable mixing devices or plants
- B01F33/501—Movable mixing devices, i.e. readily shifted or displaced from one place to another, e.g. portable during use
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F31/00—Mixers with shaking, oscillating, or vibrating mechanisms
- B01F31/55—Mixers with shaking, oscillating, or vibrating mechanisms the materials to be mixed being contained in a flexible bag submitted to periodical deformation
-
- A—HUMAN NECESSITIES
- A45—HAND OR TRAVELLING ARTICLES
- A45D—HAIRDRESSING OR SHAVING EQUIPMENT; EQUIPMENT FOR COSMETICS OR COSMETIC TREATMENTS, e.g. FOR MANICURING OR PEDICURING
- A45D40/00—Casings or accessories specially adapted for storing or handling solid or pasty toiletry or cosmetic substances, e.g. shaving soaps or lipsticks
- A45D40/24—Casings for two or more cosmetics
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F23/00—Mixing according to the phases to be mixed, e.g. dispersing or emulsifying
- B01F23/40—Mixing liquids with liquids; Emulsifying
- B01F23/41—Emulsifying
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F23/00—Mixing according to the phases to be mixed, e.g. dispersing or emulsifying
- B01F23/70—Pre-treatment of the materials to be mixed
- B01F23/711—Heating materials, e.g. melting
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F31/00—Mixers with shaking, oscillating, or vibrating mechanisms
- B01F31/70—Drives therefor, e.g. crank mechanisms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F33/00—Other mixers; Mixing plants; Combinations of mixers
- B01F33/50—Movable or transportable mixing devices or plants
- B01F33/501—Movable mixing devices, i.e. readily shifted or displaced from one place to another, e.g. portable during use
- B01F33/5011—Movable mixing devices, i.e. readily shifted or displaced from one place to another, e.g. portable during use portable during use, e.g. hand-held
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F33/00—Other mixers; Mixing plants; Combinations of mixers
- B01F33/50—Movable or transportable mixing devices or plants
- B01F33/501—Movable mixing devices, i.e. readily shifted or displaced from one place to another, e.g. portable during use
- B01F33/5014—Movable mixing devices, i.e. readily shifted or displaced from one place to another, e.g. portable during use movable by human force, e.g. kitchen or table devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F33/00—Other mixers; Mixing plants; Combinations of mixers
- B01F33/80—Mixing plants; Combinations of mixers
- B01F33/81—Combinations of similar mixers, e.g. with rotary stirring devices in two or more receptacles
- B01F33/813—Combinations of similar mixers, e.g. with rotary stirring devices in two or more receptacles mixing simultaneously in two or more mixing receptacles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F35/00—Accessories for mixers; Auxiliary operations or auxiliary devices; Parts or details of general application
- B01F35/20—Measuring; Control or regulation
- B01F35/21—Measuring
- B01F35/211—Measuring of the operational parameters
- B01F35/2115—Temperature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F35/00—Accessories for mixers; Auxiliary operations or auxiliary devices; Parts or details of general application
- B01F35/30—Driving arrangements; Transmissions; Couplings; Brakes
- B01F35/32—Driving arrangements
- B01F35/32005—Type of drive
- B01F35/32025—Battery driven
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F35/00—Accessories for mixers; Auxiliary operations or auxiliary devices; Parts or details of general application
- B01F35/30—Driving arrangements; Transmissions; Couplings; Brakes
- B01F35/32—Driving arrangements
- B01F35/32005—Type of drive
- B01F35/3204—Motor driven, i.e. by means of an electric or IC motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F35/00—Accessories for mixers; Auxiliary operations or auxiliary devices; Parts or details of general application
- B01F35/40—Mounting or supporting mixing devices or receptacles; Clamping or holding arrangements therefor
- B01F35/42—Clamping or holding arrangements for mounting receptacles on mixing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F35/00—Accessories for mixers; Auxiliary operations or auxiliary devices; Parts or details of general application
- B01F35/50—Mixing receptacles
- B01F35/52—Receptacles with two or more compartments
- B01F35/522—Receptacles with two or more compartments comprising compartments keeping the materials to be mixed separated until the mixing is initiated
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F35/00—Accessories for mixers; Auxiliary operations or auxiliary devices; Parts or details of general application
- B01F35/71—Feed mechanisms
- B01F35/713—Feed mechanisms comprising breaking packages or parts thereof, e.g. piercing or opening sealing elements between compartments or cartridges
- B01F35/7131—Breaking or perforating packages, containers or vials
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F35/00—Accessories for mixers; Auxiliary operations or auxiliary devices; Parts or details of general application
- B01F35/71—Feed mechanisms
- B01F35/716—Feed mechanisms characterised by the relative arrangement of the containers for feeding or mixing the components
- B01F35/7164—Feed mechanisms characterised by the relative arrangement of the containers for feeding or mixing the components the containers being placed in parallel before contacting the contents
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F35/00—Accessories for mixers; Auxiliary operations or auxiliary devices; Parts or details of general application
- B01F35/75—Discharge mechanisms
- B01F35/754—Discharge mechanisms characterised by the means for discharging the components from the mixer
- B01F35/7546—Discharge mechanisms characterised by the means for discharging the components from the mixer using squeezing means on a deformable container
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F35/00—Accessories for mixers; Auxiliary operations or auxiliary devices; Parts or details of general application
- B01F35/80—Forming a predetermined ratio of the substances to be mixed
- B01F35/88—Forming a predetermined ratio of the substances to be mixed by feeding the materials batchwise
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F35/00—Accessories for mixers; Auxiliary operations or auxiliary devices; Parts or details of general application
- B01F35/90—Heating or cooling systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F35/00—Accessories for mixers; Auxiliary operations or auxiliary devices; Parts or details of general application
- B01F35/90—Heating or cooling systems
- B01F35/92—Heating or cooling systems for heating the outside of the receptacle, e.g. heated jackets or burners
-
- A—HUMAN NECESSITIES
- A45—HAND OR TRAVELLING ARTICLES
- A45D—HAIRDRESSING OR SHAVING EQUIPMENT; EQUIPMENT FOR COSMETICS OR COSMETIC TREATMENTS, e.g. FOR MANICURING OR PEDICURING
- A45D34/00—Containers or accessories specially adapted for handling liquid toiletry or cosmetic substances, e.g. perfumes
- A45D2034/005—Containers or accessories specially adapted for handling liquid toiletry or cosmetic substances, e.g. perfumes with a cartridge
-
- A—HUMAN NECESSITIES
- A45—HAND OR TRAVELLING ARTICLES
- A45D—HAIRDRESSING OR SHAVING EQUIPMENT; EQUIPMENT FOR COSMETICS OR COSMETIC TREATMENTS, e.g. FOR MANICURING OR PEDICURING
- A45D2200/00—Details not otherwise provided for in A45D
- A45D2200/05—Details of containers
- A45D2200/054—Means for supplying liquid to the outlet of the container
-
- A—HUMAN NECESSITIES
- A45—HAND OR TRAVELLING ARTICLES
- A45D—HAIRDRESSING OR SHAVING EQUIPMENT; EQUIPMENT FOR COSMETICS OR COSMETIC TREATMENTS, e.g. FOR MANICURING OR PEDICURING
- A45D2200/00—Details not otherwise provided for in A45D
- A45D2200/05—Details of containers
- A45D2200/058—Means for mixing different substances prior to application
-
- A—HUMAN NECESSITIES
- A45—HAND OR TRAVELLING ARTICLES
- A45D—HAIRDRESSING OR SHAVING EQUIPMENT; EQUIPMENT FOR COSMETICS OR COSMETIC TREATMENTS, e.g. FOR MANICURING OR PEDICURING
- A45D2200/00—Details not otherwise provided for in A45D
- A45D2200/15—Temperature
-
- A—HUMAN NECESSITIES
- A45—HAND OR TRAVELLING ARTICLES
- A45D—HAIRDRESSING OR SHAVING EQUIPMENT; EQUIPMENT FOR COSMETICS OR COSMETIC TREATMENTS, e.g. FOR MANICURING OR PEDICURING
- A45D2200/00—Details not otherwise provided for in A45D
- A45D2200/15—Temperature
- A45D2200/155—Heating or cooling means, i.e. for storing or applying cosmetic products at a predetermined temperature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F35/00—Accessories for mixers; Auxiliary operations or auxiliary devices; Parts or details of general application
- B01F35/90—Heating or cooling systems
- B01F2035/98—Cooling
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F35/00—Accessories for mixers; Auxiliary operations or auxiliary devices; Parts or details of general application
- B01F35/90—Heating or cooling systems
- B01F2035/99—Heating
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F2101/00—Mixing characterised by the nature of the mixed materials or by the application field
- B01F2101/06—Mixing of food ingredients
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F2101/00—Mixing characterised by the nature of the mixed materials or by the application field
- B01F2101/21—Mixing of ingredients for cosmetic or perfume compositions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F2101/00—Mixing characterised by the nature of the mixed materials or by the application field
- B01F2101/22—Mixing of ingredients for pharmaceutical or medical compositions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F2101/00—Mixing characterised by the nature of the mixed materials or by the application field
- B01F2101/4505—Mixing ingredients comprising detergents, soaps, for washing, e.g. washing machines
Definitions
- the present invention relates to a manufacturing device for the manufacture of a composition, in particular cosmetic, or more precisely for the preparation of a composition by mixing two formulations.
- the structure of the manufacturing apparatus described in the document FR3026622 requires the provision of a drive motor of large size in order to transmit, to the first and second deformable compartments, pressure forces adapted to ensure migration of the contents of the first compartment to the second compartment, and conversely a migration of the contents of the second compartment towards the first compartment, and this in particular when the first and second deformable compartments or connecting channels associated with the first and second deformable compartments are closed by a weakened weld zone.
- the provision of a large drive motor substantially increases the cost of manufacturing the manufacturing apparatus, as well as the bulk and weight of the manufacturing apparatus.
- the present invention aims to remedy all or part of these drawbacks.
- the technical problem underlying the invention therefore consists in providing an apparatus for manufacturing a composition which is simple, compact and easy to use, while having a simple structure and at a reduced price.
- the invention provides a manufacturing apparatus according to claim 1.
- the mixing machine includes an auxiliary motor, preferably electric, configured to move the coupling mechanism between its two positions.
- At least two of: the coupling mechanism, the retention mechanism, the clamping mechanism are kinematically linked by a common gear or pulley.
- the auxiliary motor makes it possible to drive said gear or a common pulley in rotation.
- the auxiliary motor is configured to be powered only when the coupling mechanism needs to be moved.
- the coupling mechanism comprises a coupling wheel, rotatable about a coupling wheel axis.
- the coupling wheel has two different radii, so that in the insertion position, the coupling wheel does not extend into the receiving housing and in the coupling position, the coupling wheel extends into the receiving housing in order to exert a force on an actuation face of the receiving device.
- the coupling mechanism and therefore the coupling wheel, is separate from the drive system.
- the retention mechanism includes a retention wheel rotatable about a retention wheel axis.
- the retention wheel has two different radii, so that in the insertion position, the retention wheel does not extend into the receiving housing and in the locking position, the release wheel retention extends into the receiving housing to abut against the receiving device.
- the retention wheel axle and the coupling wheel axle coincide.
- the coupling mechanism is movable and is located at a different location from that of the actuation system in order to exert a pressure force on the receiving device other than the pressure force of the operating system. actuation.
- the clamping mechanism is a clamping wheel, rotatable about a clamping wheel axis.
- the mixing machine comprises a clamping wall, fixed, against which the clamping wheel comes to clamp in the clamping position.
- the clamping wheel is rotatably mounted on an arm, itself rotatable about an arm axis.
- the clamping wheel is mounted so as to move in translation on the arm, with return means which tend to move the mobile wheel away from the axis of the arm.
- the clamping wheel rolls against a guide wall, preferably with the aid of teeth, so that the clamping wheel rotates in the opposite direction to the arm.
- the arm is kinematically connected to a common gear kinematically connecting the coupling mechanism and at least one of: the retention mechanism, the clamping mechanism.
- the coupling button is adjacent to a fulcrum on the actuation face, said fulcrum being configured to receive the force of the actuation system.
- the coupling button is facing the coupling mechanism, the coupling mechanism being configured to press the coupling button when it occupies the position of coupling.
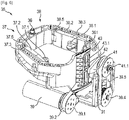
- the figure 1A and 1B represent a manufacturing device 2, according to a first embodiment of the invention, configured to manufacture a composition, which can for example be a cosmetic product, a hair care product, a pharmaceutical product, a phytosanitary product, an maintenance, a cleaning product, or an agri-food product.
- a cosmetic product the latter can for example be a homogenized emulsion, a homogenized solution or even a mixture of several miscible phases.
- the manufacturing device 2 is intended for essentially personal use and on a small scale: it allows the preparation of a single portion ready for use.
- the manufacturing device 2 has no dimension greater than 40cm.
- the manufacturing device 2 comprises reception means configured to receive first and second capsules 3, 4, also called pods or packaging units, respectively containing a predetermined quantity of a first formulation and a predetermined quantity of a second formulation , and a mixing machine 6 configured to mix the first and second formulations contained in the first and second capsules 3, 4 received in the manufacturing apparatus 2, so as to obtain a cosmetic product.
- the mixing machine 6 comprises a receiving housing forming part of the receiving means, and which are provided to receive the first and second capsules 3, 4, directly or through a specific receiving device 5.
- the mixing machine 6 comprises a receiving housing 32 adapted to receive a receiving device 5 in a removable manner.
- the receiving housing 32 in this case has a shape substantially complementary to that of the receiving device 5.
- the mixing machine 6 further comprises an actuation system 35 configured to exert a force on the first and second capsules 3, 4, via the reception device 5 if necessary, to allow the mixing and kneading of the composition to be manufacture.
- the reception device 5 also called a shuttle (because it serves as a vehicle for the first and second capsules 3, 4), preferably has a relatively symmetrical shape, either rectangular parallelepiped, or oval/ovoid.
- a longitudinal direction X is defined for it, which corresponds to the direction in which it is inserted into the reception housing 32. Consequently, the longitudinal direction X and the direction of insertion coincide when the reception device 5 is inserted into the mixing machine 6.
- the mixing machine 6 is configured to mix the first and second formulations inside the receiving device 5, and preferably inside the first and second capsules 3, 4, without any of the formulations come into contact with the manufacturing device 2.
- the first formulation is a first phase of a cosmetic product to be manufactured, such as a fatty phase of the cosmetic product
- the second formulation is a second phase of the cosmetic product, such as an aqueous phase of the cosmetic product.
- the fatty phase may constitute the base of the cosmetic product to be manufactured
- the aqueous phase may comprise active elements and thus constitute a complex of active agents of the cosmetic product to be manufactured.
- the two capsules that can be used in the manufacturing device 2 presented are described in detail in the document FR3067911 A1 .
- the first and second capsules 3, 4 are separate from each other, and are configured to be fluidly connected to each other.
- each of the first and second capsules 3, 4 is advantageously for single use.
- the first capsule 3 comprises a first deformable compartment 3.1, of domed shape, containing the first formulation, a first connection part 3.2 and a first connection passage 3.3 configured to fluidically connect the first deformable compartment 3.1 and the first connection part 3.2.
- the first connecting passage 3.3 is formed by a first connecting channel.
- the first connection part 3.2 more particularly comprises a female connection end piece 3.4, for example of cylindrical shape, fluidly connected to the first connecting passage 3.3.
- the first capsule 3 comprises a flat face 3.7 through which the connection part 3.2 passes.
- the first capsule 3 further comprises an outlet passage 3.5, such as an outlet channel, which is fluidly connected to the first connecting passage 3.3, and which is provided with an outlet orifice 3.6.
- the outlet passage 3.5 extends in the extension of the first connecting passage 3.3, and substantially parallel to the first connecting passage 3.3.
- the outlet passage 3.5 can be either mounted on the first capsule 3 or on the second capsule 4. In fact, the outlet passage 3.5 is only requested to operate once the manufacturing device 2 has been used.
- the second capsule 4 comprises a second deformable compartment 4.1, of curved shape, containing the second formulation, a second connection part 4.2 configured to be connected to the first connection part 3.2, and a second connection passage 4.3 configured to fluidically connect the second deformable compartment 4.1 and the second connection part 4.2.
- the second connecting passage 4.3 is formed by a second connecting channel, and the second connecting part 4.2 extends substantially perpendicularly with respect to the second connecting passage 4.3.
- the second connection part 4.2 more particularly comprises a male connection end piece 4.4, for example of cylindrical shape, fluidly connected to the second connecting passage 4.3 and configured to receive the female connection end piece 3.4 in a sealed manner.
- the second capsule 4 comprises a flat face 4.7 through which the second connection part 4.2 passes.
- the first and second capsules 3, 4 and more particularly the first and second deformable compartments 3.1, 4.1 are each closed by connection welds ensuring the tightness of the first and second capsules 3, 4, these connection welds being breakable as soon as a threshold pressure is reached. These threshold pressures can be reached in the mixing machine 6. Again, these connection welds are described in detail in the description of the document FR3067911 A1 .
- Each of the first and second capsules 3, 4 is configured to contain all or substantially all of a mixture formed by the predetermined quantity of the first formulation and the predetermined quantity of the second formulation.
- either the deformable compartments are flexible or buffer zones are provided. Again, the document description FR3067911 A1 describes this precisely.
- the receiving device includes
- the reception device 5 is able to occupy an open position in which the first and second capsules 3, 4 are able to be introduced into the reception device 5, and a closed position in which the reception device 5 is able to maintain position the first and second capsules 3, 4.
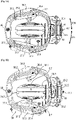
- the reception device 5 more particularly takes the form of a reception box 7 ( figure 2A , 2B) configured to receive and house at least partially the first and second capsules 3, 4.
- the reception device 5 comprises in particular a first protective shell 8 and a second protective shell 9 mounted articulated with respect to each other around of a hinge pin 10 (or hinge) and between a first position (see figure 2A , 2B , 5 ) corresponding to an open position of the receiving device 5 and a second position (see figure 4A , 4B) corresponding to a closed position of the receiving device 5.
- the receiving device 5 further comprises a first support part 11 and a second support part 12 arranged in the receiving box 7.
- the first and second support parts 11, 12 respectively comprise a first reception location 13 configured to receive the first capsule 3 and a second reception location 14 configured to receive the second capsule 4.
- the first and second protective shells 8, 9 each comprise an opening 8.2, 9.2 to allow access to the first or second reception location 13, 14. These openings 8.2, 9.2 define an insertion face of the reception device 5.
- the reception device 5 comprises a withdrawal face, opposite the insertion face.
- the first support part 11 comprises receiving wedges 15 configured to receive a peripheral portion of the first capsule 3, and the second support part 12 also comprises receiving wedges 15 configured to receive a peripheral portion of the second capsule 4.
- These receiving wedges 15 partly define the first and second receiving locations 13, 14.
- the first support part 11 comprises a first placement surface 11.1, configured to guide (with contact) and receive the flat face 3.7 of the first capsule 3.
- the first placement surface 11.1 therefore partly defines the first reception location 13.
- the second support part 12 comprises a second placement surface 12.1, configured to guide (with contact) and receive the flat face 4.7 of the second capsule.
- the placement surface 12.1 therefore partly defines the second reception location 14.
- the first and second placement surfaces 11.1, 12.1 each comprise a passage opening 11.2, 12.2, in the form of a slit, open outwards, along an axis of insertion X ( Figure 1A ).
- the receiving device 5 further comprises a separation wall 22, defining a separation plane ( figure 3A , 3B).
- the dividing wall 22 is located between the first and second reception locations 13, 14. It is also integral with the first support part 11.
- the dividing wall 22 comprises a passage opening 22.2 in order to allow the first and second connection parts 3.2, 4.2 to be positioned in the receiving device.
- the passage opening 22.2 is in the form of a slot through the thickness and open to the outside.
- the openings 11.2, 22.2, 12.2 therefore form a space to receive the connection end pieces 3.4, 4.4 of the first and second capsules 3, 4.
- a first actuation face 8.1 is also defined which comprises the first shell 8 and the first support part 11 and a second actuation face 9.1 which comprises the second shell 9 and the second support part 12.
- Each actuation face 8.1, 9.1 intervenes in the transmission of the forces received by the reception device 5 to the first and second capsules 3, 4. This will be explained in detail later.
- the first and second shells 8, 9 are articulated with respect to each other around the axis of articulation 10 and between a reception position (see the figure 2A , 2B , 3A , 3B ) in which the first and second shells 8, 9 are remote from each other and the first and second capsules 3, 4 are able to be received respectively in the first and second reception locations 13, 14, and a position connection (see figure 4A , 4B) in which the first and second shells 8, 9 are close together and the first and second capsules 3, 4 are pre-connected to each other.
- pre-connected to each other is meant that the male connection endpiece 4.4 of the second capsule 4 is partially inserted into the female connection endpiece 3.4 of the first capsule 3 without, however, a sealed connection is established between these first and second capsules 3, 4.
- the first and second shells 8, 9 may for example have an angle of inclination greater than or equal to 7°, and for example of about 7°, when they are in the receiving position, and be substantially parallel to each other. relative to each other when they are in the connection position. More precisely, there are two main assemblies that are only hinged relative to each other: the first shell 8, the first support part 11, the partition wall 22 and the second support part 12 on the one hand; and the second shell 9, on the other hand.
- the first and second shells 8, 9 are configured to engage the first connection part 3.2 in the second connection part 4.2 when the receiving device 5 is moved into the closed position. .
- the connection parts 3.2, 4.2 are partially nested with each other.
- the first and second support parts 11, 12 are more particularly configured such that the first and second capsules 3, 4 extend substantially parallel to each other, when the first and second shells 8, 9 are in the connection position.
- the first capsule 3 is configured to extend partly outside the reception device 5 when it is received in the reception device 5 and the latter is in the closed position.
- the outlet orifice 3.6 is configured to extend outside the reception device 5 when the first capsule 3 is received in the reception device 5 and the latter is in the closed position.
- the manufacturing device 2 comprises a heating element 46 (also called “heating element") visible on the figure 3A , 3B .
- the heating element 46 forms part of the receiving device 5.
- the latter could be integrated into the mixing machine.
- the heating element 46 is attached to the partition wall 22. During the design, it was chosen that the heating element 46 is on the side of the first support part 11, which means that the heating element heater 46 is mounted on the side of the partition wall 22 which is on the side of the first support part 11.
- the heating element 46 preferably comprises one or more electric heating resistors 46.1 and a diffusion plate 46.2.
- the heating element 46 thus has a planar shape to better diffuse the heat, if possible with a surface area of at least 500 mm 2 and preferably of the order of 800 mm 2 .
- the first support part 11 there is provided in the first support part 11 a communication opening 46.3 which places the flat face 3.7 of the first capsule 3 with heating element 46 (i.e. separated only by air).
- the heating element 46 needs to be supplied with electricity.
- the reception device 5 does not have its own battery and must be powered when it is inserted into the reception housing 32.
- the reception device 5 comprises the insertion face, where the openings 8.2, 9.2 are located and which is the face which first enters the reception housing 32, and an opposite withdrawal face, which is the visible face when the receiving device 5 is inserted into the receiving housing 32.
- the receiving device 5 further comprises a first actuating face 8.1 and a second actuating face 9.1, opposite each other.
- connection device 5 comprises a first connection face 23 and a second connection face 24, preferably opposite.
- connection faces 23 and 24 correspond to the side faces of the heating element 46 and are therefore distinct from the first and second actuation faces 8.1, 9.1 and from the insertion/withdrawal faces.
- connection faces 23, 24 extend between the actuating faces 8.1, 9.1 of the receiving device 5.
- connection faces 23, 24 interconnect the actuating faces 8.1, 9.1 of the receiving device 5 , that is, they are contiguous.
- the general shape of the receiving device 5 is chosen so that the connection faces 23, 24 are further apart from one another than the actuation faces 8.1, 9.1 (and than the insertion/removal faces).
- the faces which touch the connection faces 23, 24 are further apart than the faces which touch the actuation faces 8.1, 9.1 and are closer than the faces that touch the insert/remove faces. This translates into the fact that the receiving device 5 is wider than it is thick (and moreover it is higher than it is wide).
- the first connection face 23 comprises a first electrical contact track 23.1 intended to supply the heating element 46 and the second connection face 24 comprises a second electrical contact track 24.1 also intended to supply the heating element 46 ( figure 2A , 3A , 3B , 4A , 4B ).
- the electrical contact tracks 23.1, 24.1 are therefore outside the reception device 5, in order to be brought into contact with complementary tracks ( figure 2A , 4A , 4B ).
- This configuration has several advantages: first, it provides a simple and efficient electrical connection. It also avoids the risk of short circuit. Indeed, if ever liquid were to flow into the receiving housing 32 (for example water from the shower or the sink or quite simply a capsule which bursts), it is unlikely that the two electrical contact tracks 23.1 , 24.1 are touched at the same time by the same volume of liquid.
- the first connection face 23 comprises a portion of the first and second shells 8, 9, of the first support part 11 and of the separation wall 22.
- the first connection face 23 comprises a longitudinal groove 23.2 with a bottom 23.21 and two side walls 23.22, 23.23.
- the first electrical contact track 23.1 is preferably positioned on the side wall 23.22 of the longitudinal groove 23.2.
- the bottom 23.21 and the side wall 23.23 are formed by a portion of the first support part 11.
- a suitable cutout 8.5 is then provided in the first shell 8 to make room for the longitudinal groove 23.2.
- the opposite side wall 23.22 is produced by a portion of the partition wall 22.
- the first electrical contact track 23.1 is then positioned on this side wall 23.22 (because the heating element 46 is mounted on the partition wall).
- a similar longitudinal groove 24.2 is provided on the second connection face 24, with a cutout 9.5 in the second shell 9 and a bottom 24.21 and two opposite side walls 24.22, 24.23. Due to the non-centering of the grooves, the cutout 9.5 in the second shell 9 is much less marked than the cutout 8.5 in the first shell 8.
- the grooves 23.2, 24.2 are configured to engage on respective complementary rails 31.1, 31.2 (slide connection) provided in the receiving housing 32 on (preferably opposite) connection sides ( figure 1A , 7A). Consequently, the grooves 23.2, 24.2 form undercuts which extend over the entire height of the portion of the receiving device 5 where they are located - at the very least up to the height of insertion.
- the complementary rails 31.1, 31.2 contribute to defining the reception housing 32 and are positioned on opposite edges.
- the electrical contact tracks 23.1, 24.1 are not located at the same level, but are offset.
- the electrical contact tracks 23.1, 24.1 can take several forms: electrical pins, metal blades (as illustrated), etc.
- the electrical contact tracks 23.1, 24.1 are preferably slightly deformable to ensure permanent contact when the reception device 5 is placed in the reception housing 32.
- the longitudinal grooves 23.2, 24.2 do not extend over the entire height of the portion of the first or second shell 8, 9 where they are located.
- an abutment effect is obtained simply by the part of the first or second shell 8, 9 which does not pass through due to the undercut effect.
- the first or second shell 8, 9 prevents the insertion of the grooves 23.2, 24.2 on the rails 31.1, 31.2 when the receiving device 5 is in the wrong direction.
- longitudinal grooves 23.2, 24.2 each include an end stop 23.3, 24.4, located on the side of the withdrawal face. These end stops 23.3, 24.4 act as insertion stops, to define a maximum insertion position in the receiving housing 32.
- the first support part 11 is favored over the second support part 12 to carry a wall 23.23, 24.23 of the groove 23.2, 24.2, because of the heating element 46 which is intended mainly to heat the first capsule 3.
- a temperature sensor (not visible in the figures) is attached to the rear face of the diffusion plate 46.2 to measure the temperature prevailing near the first reception location 13 and therefore the first capsule 3.
- the temperature sensor is typically an NTC (Negative Temperature Coefficient thermistor).
- This temperature sensor 6 must also be electrically connected to the mixing machine 6 (in particular ultimately the processor, to recover the data) and to a battery 44 fitted to the mixing machine 6, to power it.
- a first additional electrical contact track 46.51 is provided at the level of the first contact face 23. This first additional electrical contact track 46.51 is separate from the first electrical contact track 23.1. More specifically, the first additional electrical contact track 46.51 is provided in the first groove 23.2, on the wall side 23.23, that is to say the side wall formed by the first support part 11.
- a second additional electrical contact track 46.52 is provided in the second groove 24.2.
- additional electrical contact tracks 46.51, 46.52 are also advantageously offset.
- additional electrical contact track 46.51 and electrical contact track 24.1 are at the same level and additional electrical contact track 46.52 and electrical contact track 23.1 are at the same level.
- the figure 2A , 3A , 3B , 4A , 4B , 5 illustrate these tracks.
- the receiving device 5 comprises a polarizer 17 to ensure that the first and second capsules 3, 4 are correctly positioned, that is to say that the "good” capsules 3, 4 are put in the "good” locations.
- receiver 13, 14 (distinctly visible on the figure 2A , 5).
- the polarizer 17 is preferably located at the end of the passage openings 11.2, 12.2, to block the unwanted passage of an unwanted connection end piece 3.2, 4.2.
- the polarizer 17 comprises at least one leaf 17.1 opening towards the outside of the reception device 5 (preferably two, on each side as illustrated in the figures; preferably, the two leaves 17.1 have a saloon configuration, that is to say that is, articulated by hinges towards the outside of the receiving device 5).
- polarizer 17 fulfills two distinct roles.
- the leaf 17.1 comprises an opening 17.2 of complementary shape to the female connection end piece 3.4 of the first capsule 3 in order to allow its insertion into the opening 8.2.
- the leaf 17.1 comprises a stop 17.3, which contributes to defining the opening 17.2, in order to prevent the insertion into the opening 8.2 of the second connection part 4.2, which is longer transversely than the first connection part 3.2 . Indeed, if we try to insert the second capsule 4 into the first receiving location 13, the end of the second connection part 4.2, that is to say a part of the male connection end piece 4.4 comes to knock against the abutment 17.3.
- the corrector 17 blocks it when the reception device 5 is in the closed position: the passage opening 12.2 is blocked, preferably also by the stop 17.3.
- the receiving device 5 is in the open position, that is to say that the second shell 9 has turned on its hinge, the passage opening 12.2 is released.
- the polarizer 17 can be attached to the first support part 11 or to the second support part 12 (as in the figures), depending on the design of the relative movement of the parts: if the second support part 12 is attached to the second shell 9 (and therefore mobile in rotation with respect to the first support part 11), then it is preferable to attach the polarizer to the first support part 11. In other words, this is irrelevant.
- Return springs 17.4 keep the polarizer 17 in the default position, that is to say closed.
- the reception device 5 further comprises a first support element 19 configured to penetrate inside the second reception location 14, that is to say to exert a pressure force on the first capsule 3, and more particularly on the first deformable compartment 3.1, and a second support element 21 configured to penetrate inside the first reception location 13, that is to say to exert a pressure force on the second capsule 4, and more particularly on the second deformable compartment 4.1.
- the first support element 19 (respectively the second support element 21) is preferably mounted on the first support part 11 (respectively the second support part 12) and is movable between an inactive position, or so-called deployed position, in which the first or second reception location 13, 14 is accessible for the first or second capsule 3, 4 (see the figure 2B , 3A , 3B ) and an active position or so-called folded position, in which the first support element 19 (respectively the second support element 21) penetrates inside the first reception location 13 (respectively the second reception location 14), that is to say that it is capable of exerting a pressure force on the first deformable compartment 3.1 of the first capsule 3 (respectively the second deformable compartment 4.1 of the second capsule 4).
- the first support element 19 (respectively the second support element 21) is advantageously rotatably mounted around a hinge 19.1 (respectively the hinge 21.1).
- the hinge 19.1 (respectively the hinge 21.1) is located opposite the opening 8.2 (respectively the hinge 8.1) of the first shell 8 (respectively the second shell 9).
- the hinges 19.1, 21.1 are therefore both located close to the withdrawal face of the receiving device 5.
- the support elements 19, 21 each have a flat internal face 19.2, 21.2 to form mobile pallets in rotation. Each planar internal face 19.2, 21.2 cooperates with its respective first or second capsule 3, 4. As one presses on the support elements, the volume between the pallet and the placement surface 11.1, 12.1 gradually and continuously decreases.
- the outlet orifice 3.6 and the connection parts 3.2, 4.2 are located on the side opposite the hinge 10: this allows the cream to be expelled effectively from the first or second capsule 3 , 4 avoiding any unwanted retention zone inside it.
- return means 21.3 like springs, are provided, resting against the first or second shell 8, 9 ( figure 5 ).
- the means of reminders 21.3 can tend to push the pallet which extends slightly on the other side of the hinge 21.1.
- the two support elements 19, 21 are activated successively to allow the mixing of the cream.
- the cream then passes from a first or second capsule 3, 4 to the other second or first capsule 4, 3.
- the hinge 19.1 (respectively the hinge 21.1) defines an axis of rotation included in the plane of the placement surface 11.1 (respectively the placement surface 12.1) and orthogonal to the longitudinal axis of the reception device 5.
- the internal face 19.2, 21.2 can be pressed against the placement surface 11.1, 12.1.
- the hinge 19.1, 21.1 is preferably located just at the end of the first or second reception location 13, 14.
- the first and second shells 8, 9 each include, preferably opposite the end part of the pallet (to take advantage of the leverage effect and minimize the effort to be applied) , a fulcrum 8.3, 9.3, configured to receive an external force, described in more detail below.
- the fulcrum 8.3, 9.3 is attached to a flexible zone 8.4, 9.4, which can deform (in elastomer, etc.).
- the flexible zone 8.4, 9.4 is itself attached to the rest of the first or second shell 8, 9, made from a more rigid plastic.
- the fulcrum 8.3, 9.3 is in a rigid material (typically plastic).
- the first and second shells 8, 9 have two orifices, preferably opposite the end part of the pallet, in order to allow free access to the support elements 19, 21.
- a user can, with one hand, grasp the receiving device 5 and press the support points 8.4, 9.4 simultaneously, for example with the thumb and the index/middle finger. Simultaneous pressure makes it possible to direct the cream from the first and second capsules 3, 4 towards the outlet orifice 3.6.
- the pallets can be directly integrated into the mixing machine 6.
- a retention mechanism 50 In order to prevent the receiving device 5 from being removed from the receiving housing 32 when the mixing process is in progress, a retention mechanism 50, described in detail later, is provided in the manufacturing apparatus 2.
- a retention abutment 9.6 is provided on one of the first or second shells 8, 9 (the second shell 9 on the figure 2A , 2B , 3A , 3B , 4B , 5 ).
- This retention stop 9.6 essentially corresponds to a projection extending radially, that is to say in a plane orthogonal to the longitudinal direction X. It can be at any location along the height of the device. reception 5.
- the retention stop 9.6 is arranged close to the insertion face.
- Another stop can be provided on the other shell, for ergonomic reasons for example.
- gripping handles 8.7, 9.7 are provided on each of the first and second protective shells 8, 9 (visible especially on the figure 1 , 2B , 4A , 4B ). These gripping handles 8.7, 9.7 are located at the level of the withdrawal face, which is the one accessible when the reception device 5 is in place.
- the gripping handle 8.7, 9.7 can simply be constituted by a projection extending radially, that is to say in a plane orthogonal to the longitudinal direction X, long enough for part of the user's phalanx can shoot it.
- These support points 8.3, 9.4 are formed in a flexible zone 8.4, 9.4.
- connection end pieces 3.4, 4.4 come opposite each other and partially fit together.
- a coupling mechanism 52 is provided in the manufacturing apparatus 2. This coupling mechanism 52 exerts a force in the direction of the receiving device 5. This coupling mechanism 52 makes it possible both to establish the fluidic connection between the first and second capsules 3, 4 under the effect of the force exerted by the coupling mechanism 52 but also to avoid any unwanted disconnection first and second capsules 3, 4 under the effect of the pressures generated by the mixing of the first and second capsules 3, 4. It will be described later.
- One of the first or second protective shells 8, 9 comprises a coupling button 9.8, movable in the direction of the second reception location 14 ( figure 2A , 2B , 3A , 3B , 4A , 4B , 5 ). More precisely, it is movable in the direction of a zone close to the opening 9.2, since the coupling button 9.8 is intended to press on the second capsule 4 close to the connection portion 4.2.
- the coupling button 9.8 is attached to a flexible zone, which may be the flexible zone 9.4 of the fulcrum 9.3. It is noted here that the coupling button 9.8 is distinct from the fulcrum 9.3.
- the coupling button 9.8 is preferably rigid to better transmit the force of the coupling mechanism 52 to the first and second capsules 3, 4, which are therefore kept coupled.
- the mixing machine 6 comprises a support 31, and a reception housing 32 defined at least in part by the support 31 and configured to receive at least in part the reception device 5.
- the mixing machine 6 and the receiving device 5 are configured such that the receiving device 5 extends at least partly outside the mixing machine 6, when the receiving device 5 is received in the receiving housing 32.
- the support 31 behaves like a base, that is to say it defines a set of fixed elements when the mixing machine 6 is placed on a support (table, work surface, ...), regardless of whether it is in use or not.
- the support 31 of the mixing machine 6 also comprises an outer shell 33 and an insertion opening 34 opening into the reception housing 32, the reception device 5 being configured to be inserted into the reception housing 32 through the insertion opening 34.
- the insertion opening 34 is formed in a central portion of an upper surface of the base 33, and is configured to be oriented upwards when the mixing machine 6 is placed on a horizontal support surface (table, worktop, ).
- the base 33 also acts as an outer casing, with the desired design for the mixing machine.
- Base 33 may include a lower base and an upper base.
- the mixing machine 6 further comprises an actuation system 35 pivotally mounted on the support 31 around a substantially vertical pivot axis 36 when the mixing machine 6 is placed on a horizontal support surface (table, work surface , ...) ( figure 6 , 8A , 8B , 8C , 9 , 10A ).
- the actuation system 35 performs back and forth movements around the pivot axis 36 according to a maximum angular movement of 45°.
- the movement is therefore composed of a rotation at +45°C maximum then a rotation at -45°, and so on. Its movement takes place along a nominal stroke C35 (not shown in the figures), which, in the case of rotation around the pivot axis 36, is associated with the maximum angular displacement.
- the nominal stroke C35 of the actuation system 35 is defined as the stroke between two extreme positions of said actuation system 35.
- a neutral position of the actuation system 35 is defined between these two extreme positions, the neutral position of the actuation system 35 corresponding to an insertion position in which the receiving device 5 can be positioned inside the receiving housing 32 of the mixing machine 6 without being hindered by the actuation system 35.
- the mixing machine 6 further comprises a drive motor 39 mounted on the support 31.
- the drive motor 39 is configured to pivot the actuation system 35 around the pivot axis 36 and in an angular range predetermined. Preferably, the drive motor 39 only rotates in one direction.
- the actuation system 35 comprises a first actuation member 37, which may comprise a first actuation finger 37.1, configured to transmit a pressure force to the first capsule 3, and a second actuation member 38, which may include a second actuating finger 38.1, opposite to the first actuating member 37 and configured to transmit a pressure force to the second capsule 4.
- the first and second actuating members 37, 38 are configured to be arranged on either side of the receiving housing 32 and therefore of the receiving device 5 when the latter is received in the mixing machine 6, and more precisely in the receiving housing 32.
- the actuators 37, 38 have at least one position in which they are at least partially inside the receiving housing 32. In the neutral position of the actuator system 35, the actuators 37, 38 are arranged relative to the receiving housing 32 so as to allow the receiving device 5 to be positioned inside the receiving housing 32 of the mixing machine 6; this is the insertion position.
- the first and second actuating members 37, 38 are more particularly configured to exert pressure forces respectively and alternately on the first and second support elements 19, 21, so as to transmit pressure forces respectively and alternately on the first and second compartments 3.1, 4.1.
- the first and second actuating members 37, 38 are configured to cooperate respectively with the first and second bearing points 8.3, 9.3 of the first and second protective shells 8, 9, or directly on the bearing elements 19, 21.
- An actuation stroke C37 is defined for the first actuation member 37 and an actuation stroke C38 for the second actuation member 38.
- the actuation stroke C37 is defined as the stroke of the first actuation member 37 between the neutral position of the actuation system 35 and the maximum actuation position of the first actuation member 37, in which the first actuation member actuation 37 is in maximum compression on the first support element 19.
- actuation stroke C38 is defined as the stroke of the second actuation member 38 between the neutral position of the actuation system 35 and the maximum actuation position of the second actuation member 38, in which the second member actuation 38 is in maximum compression on the second support element 21.
- the movement of the actuation system 35 can be monitored using various sensors, and in particular Hall effect sensors.
- each of said first actuation member 37 and second actuation member 38 may comprise a magnet intended to interact with a fixed Hall effect sensor.
- the Hall effect sensor can be placed directly on a control unit 45 which will be described later, as can be seen in the figure 12 . It is thus possible for the control unit 45 to follow the movement of the actuation system 35, and even of each of the first and second actuation members 37, 38. It is even possible, for the control unit 45 , to know precisely the position of each of the first and second actuating members within their respective actuating strokes C37, C38, for example by arranging several Hall effect sensors.
- the first and second actuating members 37, 38 extend substantially in the same plane of extension, and converge opposite the pivot axis 36.
- the actuator system 35 has a substantially annular shape defining an opening around the receiving housing 32.
- the actuator system 35 is formed essentially in one piece, comprising an opening to receive a shaft defining the pivot axis 36.
- the first actuating member 37 and the second actuating member 38 are each arranged on opposite sides of the actuating system 35. Consequently, there is an actuating system 35 extending twice over two opposite faces two two: the actuators 37, 38, the opening for the pivot axis 36 and the drive mechanism with groove which is described later.
- the actuating members 37, 38 can each comprise a drive support 37.3, 38.3, which meet on one side at the level of the pivot axis 36. On the other side, a connection portion 36.1 is defined. , which connects the two drive supports 37.3, 38.3. The connection portion 36.1 can be attached or integral with the drive supports 37.3, 38.3.
- the two actuators 37, 38 rotate around the same pivot axis 36.
- the actuating members are movable in translation.
- the actuation system 35 moves along a nominal stroke C35 to exert a force on the receiving device 5.
- the actuation system 35 may include a spring 37.4, 38.4 (particularly visible in Figures 8A, 8B , 8C ).
- the spring 37.4, 38.4 is configured to compress when the actuation system 35 reaches the vicinity of its nominal end of travel C35 and the actuation finger 37.1, 38.1 is in abutment against the flat face 3.7,4.7 of the capsule.
- the spring 37.4, 38.4 therefore generates a force tending to separate the actuating member 37, 38 from the receiving device 5.
- each actuation member 37, 38 comprises a spring 37.4, 38.4.
- the spring 37.4, 38.4 can be located in different places. In an embodiment not illustrated, the spring 37.4, 38.4 is located at the "free" end of the finger 37.1, 38.1.
- the spring 37.4, 38.4 is mounted between the finger 37.1, 38.1 and the drive support 37.3, 38.3. In this way, the user cannot access it because the spring is behind the base.
- each actuating member 37, 38 an arm 37.2, 38.2, mounted to move relative to the drive support 37.3, 38.3.
- the finger 37.1, 38.1 is then mounted integrally with the arm 37.2, 38.2.
- the arm 37.2, 38.2 is rotatable relative to the drive support 37.3, 38.3 by a hinge 37.5, 38.5.
- the spring 37.4, 38.4 is positioned between the arm 37.2, 38.2 and the drive support 37.3, 38.3.
- the spring 37.3, 38.3 therefore works in compression, in the sense that its empty position, or unconstrained position, is not compressed. It is compressed in the direction of translation or rotation of the actuator 37, 38.
- the spring 37.3, 38.3 can be of the helical, leaf type, or even comprise an elastic material or an elastic assembly (elastomer, gas bubble, etc.).
- the mixing machine 6 also comprises a cam 41, in the form of a drive wheel or an arm, integral in rotation with an output shaft 39.1 of the drive motor 39 and configured to be driven in rotation around its axis 41.1 of cam rotation.
- the cam 41 is mounted on the support 31. To allow the movement back and forth with a large lever arm, it is preferable that the pivot axis 36 and the cam 41 are on either side of the housing reception 32.
- the cam 41 is equipped with a drive finger 42 which is eccentric with respect to the axis 41.1 of cam rotation.
- Cam 41 is typically driven by drive motor 39 using one or more belts.
- the kinematic chain is as follows, from the drive motor 39 and its output shaft 39.1 on which is mounted a pulley: a belt 39.2, a pulley 39.3 connected to a pulley 39.4 by a shaft, a belt 39.5, cam 41.
- the drive finger 42 is received in a drive groove 43 provided on the actuation system 35.
- the drive groove 43 is constructed in the connection portion 36.1.
- the drive groove 43 is elongated and extends along a direction of extension substantially parallel to the pivot axis 36.
- the drive groove 43 extends, according to its depth, in the direction of the pivot axis 36.
- a ball joint is provided between the drive finger 42 and the drive groove 43, which makes it possible to manage the previous misalignment.
- a ball 42.1 which is housed in a ring 43.1.
- the connection between the ball 42.1 and the ring 43.1 is a ball joint.
- the ring 43.1 is received in the drive groove 43 where it is mounted to move in translation in a direction parallel to the pivot axis 36 (therefore along the length of the drive groove 43).
- the ball 42.1 is mounted movable in translation along the drive finger 42.
- the arrangement of these different connections can be different, in the sense that the ring can also be movable in translation along the depth of the groove and the ball is then fixed on the drive finger.
- the complete connection between the drive finger 42 and the actuation system 35 comprises in series a slide, a ball joint, a slide perpendicular to the other slide. Consequently, in a kinematic torsor, it is noted that the force is only transmissible on one of the six components of the torsor, namely that of the tangent translation to the rotational movement of the actuation system 35, that is to ie the one which allows the rotation of the actuation system 35.
- the kinematic equivalent is the sphere-plane connection (also called point connection).
- the cam rotation axis 41.1 and the pivot axis 36 are preferably orthogonal. This makes it possible to have a drive finger 42 which describes a circular movement in a plane parallel to the pivot axis 36.
- the mixing machine 6 could be configured such that a rotation of the drive motor 39 in a first direction of rotation causes a pivoting of the actuating part 35 in a first direction. direction of pivoting and that a rotation of the drive motor 39 in a second direction of rotation, opposite to the first direction of rotation, causes a pivoting of the actuating part 35 in a second direction of pivoting, opposite to the first direction of swivel.
- Actuators 37, 38 each move along an actuation stroke C37, C38.
- one of the two actuation members 37, 38 has an actuation stroke C37, C38 of length strictly greater than that of the other actuation member.
- actuation stroke C37, C38 makes it possible to better manage mechanically and electrically the effort to be provided to deform the first capsule 3 with respect to the second capsule 4.
- the first capsule 3 has a greater thickness than the second capsule 4, which means that more space is needed on the side of the thicker capsule and that the support element 19 will be in contact more quickly and will start to work faster than supporting element 21.
- One solution is to have a drive groove 43 not centered in the connection portion 36.1.
- the offset can also be defined using the receiving housing 32 with respect to the axis of rotation of the cam 41: thus the extreme positions of the actuation system 35 are not centered around the receiving housing 32.
- the offset can also be defined relative to the first and second placement surfaces 11.1, 12.1 or relative to the location of the first and second capsules 3, 4 within the receiving housing 32: using the flat faces 3.7, 4.7, which therefore define artificial planes in the receiving housing 32.
- the maximum distance from the first actuating member 37 to said plane of the flat face 3.7 is greater than the maximum distance of the second actuating member 38 with respect to the face flat 4.7.
- the pivot axis 36 is included in a plane located equidistant from the two placement surfaces 11.1, 12.1.
- the first actuating finger 37.1 is advantageously longer than the second actuating finger 38.1. This is notably due to the fact that it is necessary to compensate for the extreme position of the actuating fingers 37.1, 38.1 due to the shift. More exactly, the actuating finger 37.1, 38.1 which works on the thickest first or second capsule 3, 4, has a greater length than the other actuating finger 38.1, 37.1.
- a non-zero angle Ag typically Ag is between 5° and 30°
- the actuating strokes C37, C38 correspond, at the level of the cam 41, to the rotation from said angle Ag to the nearest 90° rotation (that is to say 3 o'clock or 9 o'clock, when the mixing machine 6 is placed on a horizontal support) and then to the rotation from the said angle Ag' until the rotation at 270°.
- Ag and Ag' are not at 0 and 180° (noon and 6 o'clock), we immediately notice that the strokes C37 and C38 are not equal.
- the first actuating stroke C37 has therefore been traversed in a first direction then the first actuating stroke C37 in a second direction, then the second actuating stroke C38 in a first direction then the first actuation stroke C38 in a second direction, that is to say twice the nominal stroke C35.
- the mixing machine 6 also comprises electrical contact tracks 31.11, 31.12 configured to engage with the electrical contact tracks 23.1, 24.1 of the longitudinal grooves 23.2, 24.2 of the receiving device 5 and the contact tracks electric 31.51, 31.52 configured to engage with the additional electric contact tracks 46.51, 46.52 of the longitudinal grooves 23.2, 24.2.
- These electrical contact tracks are mounted on the rails 31.1, 31.2 ( figure 1A , 7A) , which are integral with the support 31 and which are mounted on two connection side of the receiving housing 32.
- the location of the electrical contact tracks 31.11, 31.12 (and also 31.51, 31.52) on the rails 31.1, 31.2 is complementary to the location of the electrical contact tracks 23.1, 24.1 (and also 46.51, 46.52) of the connection faces 23, 24 of the reception device 5.
- the rails 31.1, 31.2 contribute to defining the reception housing 32. They are for example located on the edge and are preferably fixed over their entire length at bracket 31.
- the location of the electrical contact tracks 31.51, 46.51 and 31.52, 46.52 on two opposite rails 31.1, 31.2, located at a distance from each other, has the advantage of limiting the risks of short-circuit if ever liquid were to sink by gravity on one of the rails 31.1, 31.2.
- the mixing machine 6 further includes a retention mechanism 50, a coupling mechanism 52 and a clamping mechanism 54 ( Figures 10A, 10B , 10C, 10D , 10E , 10F , 11A, 11B , 11C ).
- Each of these mechanisms has its own independent function. However, they can advantageously be driven simultaneously by the same auxiliary motor 40.
- the retention mechanism 50 has the function of preventing the removal of the receiving device 5 when mixing is in progress.
- the retention mechanism 50 is mounted to move relative to the support 31 between an insertion position and a retention position. In the insertion position, the retention mechanism 50 allows the insertion and removal of the receiving device 5 relative to the mixing machine 6. In the retention position, the retention mechanism 50 blocks the removal of the reception 5 (and therefore would prevent its insertion).
- the retention mechanism 50 comprises a movable element 50.1 between the two aforementioned positions, which extends into the receiving housing 32 in the retention position.
- the movable element 50.1 cooperates with the retention abutment 9.6 to prevent a translational movement of the receiving device 5 aimed at extracting it from the mixing machine 6 (in fact, the retention abutment 9.6 comes to block against the mobile element 50.1 in the event of withdrawal).
- the movable element 50.1 and the retention stop 9.6 are provided to be located close in the retention position, preferably less than 2mm, when the receiving device 5 is placed in the mixing machine.
- the movable element 50.1 is a wheel, called retention wheel, movable around an axis of rotation of the wheel 50.2.
- the wheel 50.1 has at least two different spokes, the smaller spoke being configured not to extend into the receiving housing 32 in the insertion position and the larger spoke being configured to extend into the receiving housing 32. reception 32 in the retention position, in order to come into contact, in the event of withdrawal, against the retention stop 9.6.
- the wheel 50.1 is preferably circular with a flat portion, the flat portion allowing the insertion position.
- the wheel 50.1 is mounted on a shaft which extends along the axis of rotation of the wheel 50.2.
- This shaft comprises a pinion 51 or a pulley, connected to at least one other pinion or another pulley 51.1.
- the movable element 50.1 is movable in translation, for example by a rack and pinion system using the pinion 51.
- the function of the coupling mechanism 52 is to establish the sealed connection between the first and second capsules 3, 4 and to ensure that the latter remain well fitted via their connection end piece 3.4, 4.4 by pressing the coupling button 9.8 of the second protective shell 9.
- the coupling mechanism 52 is mounted to move relative to the support 31 between an insertion position and a coupling position. In the insertion position, the coupling mechanism 52 allows the insertion and removal of the receiving device 5. In the coupling position, the coupling mechanism 52 locks the first and second capsules 3, 4.
- the coupling mechanism 52 comprises a coupling element 52.1 movable between the two aforementioned positions, which extends into the receiving housing 32 in the coupling position.
- the coupling element 52.1 in the coupling position, cooperates with the coupling knob 9.8 which moves inside the second reception location 14.
- the coupling element 52.1 and the button coupling 9.8 are located opposite, when the receiving device 5 is placed in the mixing machine 6.
- the coupling element 52.1 is a wheel, called a coupling wheel, movable around an axis of rotation of the wheel 52.2, which preferably coincides with the axis of rotation of the wheel 50.2.
- the wheel 52.1 has at least two different spokes, the smaller spoke being configured not to extend into the receiving housing 32 in the insertion position and the larger spoke being configured to extend into the receiving housing 32. reception 32 in the coupling position, in order to come into contact with the coupling button 9.8, and to press it.
- the wheel 52.1 is preferably oval in plan.
- the wheel 52.1 is mounted on a shaft which extends along the axis of rotation of the wheel 52.2.
- This shaft comprises a pinion or a pulley, connected to at least one other pinion or another pulley 51.1.
- the shaft and the pinion are preferably the same as the shaft and the pinion 51. A first subassembly integral in rotation is thus obtained.
- the coupling element 52.1 is movable in translation, for example by a rack and pinion system using the pinion 51.
- the coupling mechanism 52 is separate from the actuation system 35. This results in a different position in the mixing machine 6 (for example at different heights). Similarly, the receiving device 5 does indeed include support points 8.3, 9.3 distinct from the coupling button 9.8.
- the clamping mechanism 54 has the function of blocking the outlet passage 3.5 of the first capsule 3 when the mixing process is in progress. Indeed, the pressures inside the first or second capsules 3, 4 could cause the cream to come out undesired. In this case, cream would spill into the mixing machine 6, which is to be avoided. It is illustrated on the Figures 11A, 11B , 11C .
- the clamping mechanism 54 is movable relative to the support 31 between an insertion position and a clamping position. In the insertion position, the clamping mechanism 54 allows the insertion and removal of the receiving device 5 carrying the first capsule 3. In the clamping position, the clamping mechanism 54 clamps the outlet passage 3.5.
- the clamping mechanism 54 comprises a clamping wheel 54.1, called clamping wheel, which is rotatable around a clamping wheel axis 54.2.
- the mixing machine 6 further comprises a guide wall 54.3, fixed (attached to the support 31, or even made in one piece with the latter), against which the clamping wheel 54.1 rolls or slides, and a clamping wall against which it is clamped in the clamping position.
- the clamping wall is advantageously a portion of the guide wall 54.3.
- the teeth 54.11 present on the clamping wheel 54.1 (in practice the wheel comprises a circular or substantially circular portion which pinches the first capsule 3 and a toothed portion, preferably under the circular portion) can cooperate in the teeth 54.31 in the wall of guide 54.3, so that the clamping wheel 54.1 rolls against the guide wall 54.3.
- the clamping wheel 54.1 has a rolling movement without slipping against the guide wall 54.3, which makes it possible to avoid slipping which could badly pinch the outlet passage 3.5.
- the distance between the clamping wheel 54.1 (except the teeth, that is to say the average distance) and the guide wall 54.3 can be reduced to become almost zero under the first capsule 3 while keeping a rolling movement against the guide wall 54.3.
- the clamping wheel 54.1 is mounted, preferably mounted rotatably, on an arm 54.5, which is itself rotatable around an axis of rotation of the arm 54.51.
- the arm 54.5 is integral with a pinion (or a pulley), or a portion of pinion 54.52, which is itself connected by various pinion or pulley to the pinion common 40.1. Consequently, the arm 54.5 is driven in rotation by the same auxiliary motor 40.
- the clamping wheel 54.1 is mounted to move in translation radially along the arm 54.5.
- Return means 54.4 arranged between the clamping wheel 54.1 and the arm 54.5 tend to move the clamping wheel 54.1 away from the axis of rotation of the arm 54.51 and therefore to press the clamping wheel 54.1 against the guide wall 54.3.
- an intermediate support which carries the axis of rotation 54.2 of the clamping wheel 54.1 is provided. It is he who is mobile in translation relative to the shaft 54.5.
- a slide connection with a pin 54.42 in the intermediate support which slides in a groove 54.53 of the shaft 54.5 makes it possible to guide the translation and also, advantageously, to limit the translation movement.
- the recall means 54.4 therefore operate in compression, insofar as by default they are not compressed (or only slightly).
- a coil spring, leaf spring, or other types of springs may be suitable.
- the clamping wheel 54.1 can remain pressed against the guide wall 54.3 even though the distance between the guide wall 54.3 and the axis of rotation of the arm 54.51 is variable (it can decrease towards the area where the exit passage 3.5 is located).
- the retention mechanism 50, the coupling mechanism 52 and the tightening mechanism 54 are driven concomitantly, by a common drive, as described according to the example embodiment below.
- the retention mechanism 50 is driven by a pinion 51, connected at least to another pinion 51.1 ( figure 10A , 10B).
- the coupling mechanism 52 is driven by a pinion, connected at least to one other pinion, which are preferably the pinion 51 and the other pinion 51.1 ( figure 10A , 10B).
- the clamping mechanism 54 is driven by a pinion portion 54.52.
- a common pinion 40.1 is preferably provided, which then drives the other pinion 51.1 and the pinion portion 54.52.
- the common pinion 40.1 is located on the output shaft of the auxiliary motor 40. It directly engages the pinion 51.1 which is mounted on a shaft comprising another pinion 51.2. This pinion 51.2 engages the pinion portion 54.52.
- auxiliary motor 40 located on the output shaft of the auxiliary motor 40, at least two of the three aforementioned mechanisms 50, 52, 54 are simultaneously in the insertion position or in the retention position respectively, coupling , Clamping.
- the same auxiliary motor 40 therefore drives all three, which constitutes a major simplification of the mixing machine 6 and of its operating logic.
- the mixing machine 6 advantageously comprises a screen 60 and/or a loudspeaker, which make it possible to exchange information with the user ( figure 1A , 1B , 7 ).
- the screen 60 is preferably tactile, to avoid providing physical buttons. It allows the user to indicate the start of the cycle and the time of withdrawal.
- the screen 60 can also display the end of the cycle, for example being accompanied by an audible warning.
- the mixing machine 6 also comprises an electrical power source (not shown in the figures) configured to electrically supply the mixing machine 6, and in particular the drive motor 39 and the auxiliary motor 40.
- the electrical power source advantageously, or even exclusively, comprises at least one rechargeable battery 44 ( figure 7B ).
- the rechargeable battery 44 advantageously consists of a two-cell lithium ion battery providing a nominal output voltage of 7.4 V.
- the mixing machine 6 further comprises a control unit 45, comprising for example a controller such as a microcontroller or processor 45.1 such as a microprocessor, configured to control the operation of the manufacturing device 2, and more particularly the drive motor 39, the auxiliary motor 40, the heating element 46, the temperature sensor and the screen 60 (for the latter a processor is preferred), as well as any sound or visual device.
- the control unit 45 advantageously comprises a memory 45.2, of the non-volatile type, which stores the lines of instructions in the form of a program to be executed by the controller or the processor 45.1, in particular to implement certain steps described in the method. below.
- the reception device 5 is integrated into the mixing machine 6. Consequently, it suffices to insert the first or second capsules 3, 4 into the first or second reception slots 13, 14. even a reception housing 32, which corresponds to the volume occupied by the reception device 5.
- the actuating faces 8.1, 9.1 may not be present: the actuating members 37, 38 in this case bear directly on the first or second capsules 3, 4.
- At least one method for manufacturing a composition, such as a cosmetic product, using the manufacturing device 2 will now be described.
- This manufacturing process is broken down into several sub-processes (called “processes” for reasons of clarity), one or more variants of which will be described.
- a distinction is made in particular between a preliminary process Ep, an initialization process Ei, a mixing process Em, then a withdrawal process Er.
- these methods are advantageously implemented using the different embodiments of the manufacturing apparatus 2 described above.
- most of the steps of the methods Ei, Em and Er are stored in the memory 45.2, of the non-volatile type, in the form of code line instructions able to be executed by the processor 45.1.
- a preliminary process Ep comprises a preliminary step Ep1 to any use of the manufacturing device 2 which consists either in connecting it to the mains or in recharging the battery 44.
- this preliminary step Ep1 can be preceded or followed by a step Ep2 for positioning the manufacturing device 2 on a flat support, possibly with a power-up step.
- an initialization process Ei is implemented.
- the processor of the manufacturing machine 2 receives a starting instruction.
- This starting instruction is typically generated by an action by a user (contact with the touch screen 60, press button, switch, etc.).
- a step Ei2 (“verification step"), the method ensures that the actuation system 35 is in neutral position, allowing the insertion of the receiving device 5 or the insertion of the first and second capsules 3, 4.
- the reception housing 32 for the insertion of the reception device 5) or the first or second reception location 13, 14 (for the insertion of the first or second capsules 3, 4 when there is no receiving device 5) are not obstructed by the actuation system 35.
- this step Ei2 it is also necessary to check that the clamping mechanism 54, the mechanism coupling 52, and the retention mechanism 50 are deactivated, that is to say in their respective insertion position.
- step Ei3 "closing step"), at least one of: the clamping mechanism 54, the coupling mechanism 52, the mechanism retention 50 are activated, that is to say they move.
- This step Ei3 consists for example of an instruction by the processor intended for the auxiliary motor 40 to trigger it, so that it drives the three aforementioned mechanisms in the case where they are all connected to the common pinion (or pulley) 40.1.
- the auxiliary motor 40 moves from a first position to a second position, so that the clamping mechanism 52, the coupling mechanism 54 and the retention mechanism 50 move from their respective insertion position to their respective clamping positions, mating and retention.
- the auxiliary motor 40 maintains the second position at the end of the step Ei3, even though it is no longer powered.
- the steps Ei1, Ei2 and Ei3 are executed in particular by the processor 45.1.
- the mixing machine 6 is ready to begin work on the first and second capsules 3, 4: this is the purpose of the mixing Em and withdrawal Er processes.
- the mixing process Em comprises a first step Em1 of the preparation phase ("primary step of setting the actuation system in motion"), during which the connecting weld of the capsule positioned furthest from the heating element 46 (the second capsule 4 in the figures), and this capsule is compressed so that its contents are partly sent to the capsule closest to the heating element 46.
- the second member actuation 38 is set in motion to break the bonding weld in the second capsule 4 (which includes for example the fatty phase formulation). In this way, part of the content of the second capsule 4 is sent to the side of the first capsule 3, in particular in the connecting passage 3.3 (because the connecting weld of the first capsule 3 is not yet broken).
- the second actuation member 38 is preferably set in motion along its actuation stroke C38. For reasons of design simplification, there is not necessarily a partial stroke sensor for the second actuator 38.
- step Em2 of the preparation phase (“secondary step of setting the actuation system in motion” or “prestressing step”)
- the first actuation member 37 is set in motion according to a partial stroke strictly less than its stroke actuation C37 and keeps its position, in order to exert a prestress on the first capsule 3 (which comprises for example the aqueous phase formulation) so that the flat face 3.7 is pressed against the diffusion plate 46.2.
- This prestress makes it possible to promote the heat exchange between the diffusion plate 46.2 and the first capsule 3 during a subsequent step Em3 (“heating step”).
- step Em3 of the preparation phase (“heating step”), the heating element 46 is activated to generate heat intended for the first capsule 3.
- the heating element 46 is positioned on the flat face side 3.7 of the first capsule 3, and that the prestressing step has allowed good thermal contact between the diffusion plate 46.2 and the first capsule 3, the heat supplied by the heating element 46 is well distributed over the contents of the first capsule 3.
- Step Em3 is therefore activated in the absence of any movement of the actuating members 37, 38.
- the temperature of the heating element 46 reaches a target temperature Tc of between 80°C and 90°C.
- the objective of this target temperature Tc is that the content of the first capsule 3 reaches a target temperature Tc′ also between 80° C. and 90° C. and preferably around 85° C.
- Tc′ also between 80° C. and 90° C. and preferably around 85° C.
- a step Em3′ of the kneading phase (“mixing step”), the heating element 46 is deactivated then the first actuating member 37 is set in motion according to its nominal stroke to break the connecting weld in the first capsule 3. Cutting off the electrical supply to the heating element 46 prior to the activation of the first actuating member 37 makes it possible to have the all of the power provided by the electrical power source available to power the drive motor 39. Such a feature is particularly advantageous in the case where the mixing machine 6 is powered by a power transformer or a battery 44 of low power.
- the steps Em4, Em5, Em6 are successive mixing steps, with or without heating (we speak of the mixing phase).
- the mixing phase step Em4 (“mixing step without heating”) consists in setting the actuating members 37, 38 in motion back and forth without activating the heating element 46, i.e. i.e. without heating. During this step, the first and second capsules 3, 4 are deformed at least once each. According to one embodiment, step Em4 lasts at least 1.4 s and preferably between 2s and 4s. Such a step of mixing without heating makes it possible to launch the drive motor 39 at a constant speed while benefiting from all the power of the electrical power source.
- Steps Em1, Em2 and Em3, Em3′, Em4 alternate setting in motion of the actuation system 35 and heating with the heating element 46.
- This is concretely translated by a power supply dedicated either to the actuation system 35 or to the heating element 46.
- This exclusive alternation makes it possible to preserve the battery 44 by distributing the moments of high power. Indeed, the engagement of the setting in motion generates a high resistive torque which imposes a high motor torque and the rise in temperature also requires a high power: the battery 44 is then strongly stressed.
- This alternating solution also makes it possible to reduce the size of components, which is a design constraint when creating a portable, battery-powered mixing machine.
- step Em5 the stresses on the battery 44 are reduced and allow a power supply to the heating element 46 and to the system of actuation 35 in parallel: this is the subject of step Em5.
- step Em5 of the mixing phase (“mixing step with heating”), the actuation system 35 remains activated and the heating element 46 is reactivated in order to maintain the mixture of the formulations at a temperature, which is preferably the target temperature Tc'. Therefore, the heating element is maintained at the target temperature Tc.
- This step Em5 lasts for example between 5s and 30s, preferably between 7s and 15s.
- the battery 44 is less stressed than for an engagement or a rise in temperature, it may tend to discharge quickly in this phase which is therefore limited in duration.
- this step Em5 is long enough for the first and second capsules 3, 4 to be deformed several times each and for the emulsion obtained by mixing the formulations to be satisfactory.
- step Em4 and Em5 the actuation system 35 has not been interrupted.
- step Em6 (“cooling step with mixing”) is implemented.
- this step is done without mixing, but it is preferable to keep the actuation system 35 activated to improve or maintain the homogenization of the formulations.
- the temperature of the cream decreases to a shrinkage temperature Tr' between 35°C and 48°C, preferably 38°C and 42°C.
- the withdrawal temperature Tr' of the cream corresponds to a withdrawal temperature Tr of the heating element 46 of between 55°C and 60°C.
- This temperature difference between the contents of the first and second capsules 3, 4 and the temperature of the heating element 46 during the cooling step is explained in particular by the fact that, during mixing, the composition is not present only part of the time in the first capsule 3 and therefore opposite the diffusion plate 46.2 at the level of which the temperature measurement is carried out.
- the simplest technique for cooling is to turn off power to heating element 46 and allow the cream to cool with air to room temperature. Consequently, the duration of step Em6 effectively depends on the ambient temperature.
- a temperature sensor is advantageously positioned in the mixing machine 6, and more precisely in the reception device 5. In order to limit the number of temperature sensors, it is the same sensor which measures the temperature of the heating element 46.
- the temperature sensor measures the temperature of the heating element 46, the same sensor is reused: this means that the end of step Em6 is determined by the temperature measured by said sensor, c' that is to say the shrinkage temperature Tr' between 55°C and 60°C.
- the actuation system 35 is stopped.
- the cooling step Em6 generally lasts at least 20s and preferably 40s.
- step Em6 could also advantageously comprise a minimum mixing time, for example of the order of 40 s, making it possible to guarantee a good emulsion, then an additional mixing time which only occurs when the shrinkage temperature Tr' has not yet been reached. In other words, one kneads all the same for a certain duration even if the temperature is lower than the shrinkage temperature Tr′.
- the mixing machine 6 could according to an embodiment not shown include a cooling system to actively cool the cream and speed up the process.
- a cooling system could be provided with a small fan in addition or not to a cooling element, the fan forcing air circulation in the mixing machine 6, and therefore cooling by convection. forced.
- step Er1 transfer step for storage
- the actuation system 35 is activated once to transfer the cream into the capsule which is on the side of the heating element 46 (this is i.e. the first capsule 3 here).
- step Em6 has already stopped in the correct configuration.
- step Er2 (“pre-stressed maintenance step”), the actuation system 35 is returned to the pre-stressed position, where the first actuating member 37 exerts a pre-stress on the first capsule 3 to press it against the diffusion plate 46.2 , then, in a step Er3 (“temperature holding step”), the heating element 46 is reactivated to hold the cream at the withdrawal temperature Tr′.
- the prestressing maintenance stage Er2 allows better heat conduction, like the stage Em2.
- a kneading or movement of the actuation system 35 is implemented periodically during step Er3 to guarantee a good emulsion, the latter possibly being partly damaged by the presence of hot spots on the diffusion plate 46.2.
- the withdrawal method may comprise, instead of step step Er2, a step Er2' ("step of maintaining in neutral position") in which the actuation system 35 is activated to be placed in the neutral position, that is to say without constraining the first or second capsules 3, 4, and in particular without constraining the first capsule 3 against the heating element 46.
- step step Er2 a step of maintaining in neutral position
- the actuation system 35 is activated to be placed in the neutral position, that is to say without constraining the first or second capsules 3, 4, and in particular without constraining the first capsule 3 against the heating element 46.
- Step Er3 is implemented for a predetermined waiting period.
- This duration is less than 15 min, so as not to power the heating element 46 for too long, but greater than 1 min, to allow flexibility in the management of the user's time in the morning, and preferably of the order of 5 min.
- step Er4 step of receiving removal instructions
- step Er5 (“neutral position step”), the actuation system 35 is activated to be placed in the neutral position.
- the actuating system 35 In the case where the actuating system 35 was previously pre-stressed at the level of the first actuating member 37, the latter must complete its movement, which moves the formulation into the second capsule 4, then the actuating system 35 stops in the neutral position which corresponds to a position suitable for the extraction of the receiving device 5. This position also corresponds to a starting position suitable for carrying out a next manufacturing cycle implementing the method described above. Indeed, the second actuating member 38 is then ready to come and compress the second capsule 4 during step Em1 as soon as the drive motor 39 is started.
- step Er3 it may be necessary for the actuation system 35 has to go back and forth to position itself in the neutral position suitable for carrying out a next manufacturing cycle implementing the method described above, that is to say with the second actuating member 38 ready to come compress the second capsule 4 during step Em1.
- step Er6 (“unlocking step”), each mechanism activated in step Ei3 is placed in the insertion position. Similarly, this step Er6 involves activation of the auxiliary motor 40.
- the user grabs the receiving device 5 and removes it from its receiving housing 32. Then he presses on the actuating faces 8.1, 9.1 to rotate the paddles in order to drive out the cream present in the first and second capsule 3, 4 through the outlet passage 3.5 of the first capsule 3. Finally, it suffices to remove the first or second capsules 3, 4 from the receiving device 5 so that the latter is once again ready for use. Indeed, no part of the mixing machine 6 (manufacturing device 2 or receiving device) was in contact with the formulations.
Description
- La présente invention concerne un appareil de fabrication pour la fabrication d'une composition, notamment cosmétique, ou plus précisément pour la préparation d'une composition par mélange de deux formulations.
- Le document
FR3026622 - une première capsule comportant un premier compartiment contenant une quantité prédéterminée d'une première formulation, et une première partie de connexion,
- une deuxième capsule comportant un deuxième compartiment contenant une quantité prédéterminée d'une deuxième formulation, et une deuxième partie de connexion configurée pour être connectée à la première partie de connexion, et
- une machine à mélange configurée pour recevoir les première et deuxième capsules, et pour mélanger les première et deuxième formulations directement à l'intérieur des première et deuxième capsules de manière à obtenir le produit cosmétique.
- La machine à mélange comporte notamment :
- un premier élément d'appui comportant une première surface d'appui configurée pour exercer, sur le premier compartiment déformable de la première capsule, un effort de pression qui est orthogonal à la direction de déplacement du premier élément d'appui,
- un deuxième élément d'appui comportant une deuxième surface d'appui configurée pour exercer, sur le deuxième compartiment déformable de la deuxième capsule, un effort de pression qui est orthogonal à la direction de déplacement du deuxième élément d'appui, et
- un moteur d'entraînement relié mécaniquement aux premier et deuxième éléments d'appui, et configuré pour permettre un déplacement cyclique des premier et deuxième éléments d'appui entre des positions inactives et actives. Un tel appareil de fabrication permet la fabrication, par un consommateur final, d'un produit cosmétique personnalisé à partir de différentes capsules.
- Cependant, la structure de l'appareil de fabrication décrit dans le document
FR3026622 - La prévision d'un moteur d'entraînement de taille importante augmente sensiblement les coûts de fabrication de l'appareil de fabrication, ainsi que le volume et le poids de ce dernier.
- De plus, le mélange des capsules se révèle plus complexe que prévu et nécessite des améliorations tant au niveau du matériel que de la façon dont le matériel est utilisé.
-
DE 90 17 592 U1 divulgue un appareil de fabrication d'un produit comprenant une machine à mélange. - La présente invention vise à remédier à tout ou partie de ces inconvénients.
- Le problème technique à la base de l'invention consiste donc à fournir un appareil de fabrication d'une composition qui soit simple, compact et facile d'utilisation, tout en ayant une structure simple et à prix réduit.
- En particulier, certaines conceptions sous forme d'une machine à mélange pouvant recevoir un dispositif de réception destiné à intégrer les capsules posent des problèmes additionnels de gestion de l'amovibilité des différents éléments. Pour éviter de mauvaises utilisations, il est préférable de confier à l'appareil de fabrication la plus grande partie des actions à accomplir et notamment d'assurer l'établissement d'une liaison étanche entre les capsules.
- A cet égard, l'invention propose un appareil de fabrication selon la revendication 1.
- Dans un mode de réalisation, la machine à mélange comprend en outre :
- un mécanisme de rétention, mobile par rapport au support et configuré pour
- * dans une position d'insertion, autoriser l'insertion et le retrait du dispositif de réception, et
- * dans une position de blocage, bloquer le retrait du dispositif de réception, et/ou
- un mécanisme de serrage, mobile par rapport au support et configuré pour
- * dans une position d'insertion, ne pas interférer avec l'insertion et le retrait du dispositif de réception comportant des capsules dans le logement de réception,
- * dans une position de serrage, pour pincer une portion d'une capsule.
- Dans un mode de réalisation, la machine à mélange comprend un moteur auxiliaire, préférablement électrique, configuré pour déplacer le mécanisme d'accouplement entre ses deux positions.
- Dans un mode de réalisation, au moins deux parmi : le mécanisme d'accouplement, le mécanisme de rétention, le mécanisme de serrage sont cinématiquement reliés par un engrenage ou une poulie commune.
- Dans un mode de réalisation, le moteur auxiliaire permet d'entrainer en rotation ledit engrenage ou une poulie commune.
- Dans un mode de réalisation, le moteur auxiliaire est configuré pour être alimenté uniquement lorsque le mécanisme d'accouplement doit être déplacé.
- Dans un mode de réalisation, le mécanisme d'accouplement comprend une roue d'accouplement, mobile en rotation autour d'un axe de roue d'accouplement.
- Dans un mode de réalisation, la roue d'accouplement présente deux rayons différents, de sorte qu'en position d'insertion, la roue d'accouplement ne s'étend pas dans le logement de réception et qu'en position d'accouplement, la roue d'accouplement s'étend dans le logement de réception afin d'exercer un effort sur une face d'actionnement du dispositif de réception.
- Dans un mode de réalisation, le mécanisme d'accouplement, et donc la roue d'accouplement, est distinct du système d'entrainement.
- Dans un mode de réalisation, le mécanisme de rétention comprend une roue de rétention mobile en rotation autour d'un axe de roue de rétention.
- Dans un mode de réalisation, la roue de rétention présente deux rayons différents, de sorte qu'en position d'insertion, la roue de rétention ne s'étend pas dans le logement de réception et qu'en position de blocage, la roue de rétention s'étend dans le logement de réception afin de faire butée contre le dispositif de réception.
- Dans un mode de réalisation, l'axe de roue de rétention et l'axe de roue d'accouplement sont confondus.
- Dans un mode de réalisation, le système d'actionnement comprend :
- un premier organe d'actionnement positionné sur un côté du logement de réception, et mobile à l'intérieur de celui, afin de transmettre un effort de pression sur une première face d'actionnement du dispositif de réception,
- un deuxième organe d'actionnement, positionné sur un autre côté, préférablement opposé, du logement de réception, et mobile à l'intérieur de celui, afin de transmettre un effort de pression sur une deuxième face d'actionnement du dispositif de réception.
- Dans un mode de réalisation, le mécanisme d'accouplement est mobile et est situé à un emplacement différent de celui du système d'actionnement afin d'exercer un effort de pression sur le dispositif de réception ailleurs que l'effort de pression du système d'actionnement.
- Dans un mode de réalisation, le mécanisme de serrage est une roue de serrage, mobile en rotation autour d'un axe de roue de serrage.
- Dans un mode de réalisation, la machine à mélange comprend une paroi de serrage, fixe, contre laquelle la roue de serrage vient se serrer en position de serrage.
- Dans un mode de réalisation, la roue de serrage est montée mobile en rotation sur un bras, lui-même mobile en rotation autour d'un axe de bras.
- Dans un mode de réalisation, la roue de serrage est montée mobile en translation sur le bras, avec des moyens de rappel qui tendent à éloigner la roue mobile de l'axe de bras.
- Dans un mode de réalisation, la roue de serrage roule contre une paroi de guidage, préférablement à l'aide de dents, de sorte que la roue de serrage tourne en sens inverse du bras.
- Dans un mode de réalisation, le bras est cinématiquement relié à un engrenage commun reliant cinématiquement le mécanisme d'accouplement et au moins un parmi : le mécanisme de rétention, le mécanisme de serrage.
- Dans un mode de réalisation, le bouton d'accouplement est adjacent à un point d'appui sur la face d'actionnement, ledit point d'appui étant configuré pour recevoir l'effort du système d'actionnement. Lorsque le dispositif de réception est positionné dans le logement de réception, le bouton d'accouplement est en regard du mécanisme d'accouplement, le mécanisme d'accouplement étant configuré pour appuyer sur le bouton d'accouplement lorsqu'il occupe la position d'accouplement.
- D'autres caractéristiques, buts et avantages de l'invention ressortiront de la description qui suit, qui est purement illustrative et non limitative, et qui doit être lue en regard des dessins annexés.
- La
figure 1A est une vue en perspective d'un appareil de fabrication, avec la machine à mélange et le dispositif de réception non-inséré, selon un mode de réalisation de l'invention. - La
figure 1B est une vue similaire à lafigure 1A , avec le dispositif de réception inséré, selon un mode de réalisation de l'invention. - La
figure 2A est une vue 3D d'un dispositif de réception selon un mode de réalisation conforme à celui de lafigure 1A , avec des capsules sensiblement en position avant insertion. - La
figure 2B est une vue en coupe d'un dispositif de réception et de capsules, similaire à ceux de lafigure 2A . - La
figure 3A est une vue 3D éclatée d'un dispositif de réception selon un mode de réalisation conforme à celui de lafigure 1A , avec des capsules positionnées en regard de leur emplacement de réception respectif. - La
figure 3B est similaire à lafigure 3A , avec une rotation d'environ 90° de chaque pièce sur elle-même. - La
figure 4A est une vue de profil (de la face de connexion) d'un dispositif de réception selon un mode de réalisation conforme à celui de lafigure 1A , avec les capsules insérées. - La
figure 4B est similaire à lafigure 4A , avec une rotation autour de l'axe longitudinal X de 180°. - La
figure 5 est une vue 3D, partiellement éclatée, d'un dispositif de réception selon un mode de réalisation conforme à celui de lafigure 1A . - La
figure 6 est une vue 3D, partielle, de la machine à mélange selon un mode de réalisation conforme à celui de lafigure 1A , représentant en particulier le système d'actionnement et le moteur d'actionnement. - La
figure 7A est une vue du dessus de la machine à mélange selon un mode de réalisation conforme à celui de lafigure 1A . - La
figure 7B est une vue du dessous de la machine à mélange selon un mode de réalisation conforme à celui de lafigure 1A , avec la batterie visible. - La
figure 8A est une vue partielle du dessus de l'appareil de fabrication avec la machine à mélange et le dispositif de réception, en position neutre pour l'insertion et le retrait du dispositif de réception, avec une illustration schématique des courses d'actionnement. - La
figure 8B est une vue partielle du dessus de l'appareil de fabrication avec la machine à mélange et le dispositif de réception, avec un système d'actionnement en milieu de course d'actionnement. - La
figure 8C est une vue partielle du dessus de l'appareil de fabrication avec la machine à mélange et le dispositif de réception, avec un système d'actionnement en fin de course d'actionnement. - La
figure 9 est une vue du dessus de la machine à mélange selon un mode de réalisation conforme à celui de lafigure 1A , représentant en particulier le système d'actionnement, le moteur d'actionnement, et la liaison pour l'entrainement du système d'actionnement, et où le système d'actionnement est dans une position extrême de course d'actionnement. - La
figure 10A est une vue 3D partielle de la machine à mélange, pour illustrer le mécanisme de rétention, le mécanisme de serrage et le mécanisme d'accouplement, en position d'insertion. - La
figure 10B est une vue 3D partielle, plus précise, de la machine à mélange, pour illustrer le mécanisme de rétention, le mécanisme de serrage et le mécanisme d'accouplement, en position d'insertion. - La
figure 10C est une vue 3D partielle, plus précise, de la machine à mélange, pour illustrer le mécanisme de rétention et le mécanisme d'accouplement, en position de rétention et d'accouplement. - La
figure 10D est une vue 3D partielle, de l'appareil de fabrication, pour illustrer le mécanisme de rétention et le mécanisme d'accouplement, en position d'insertion. - La
figure 10E est une vue 3D partielle, de l'appareil de fabrication, pour illustrer le mécanisme de rétention et le mécanisme d'accouplement, en position de rétention et d'accouplement. - La
figure 10F est une vue éclatée du mécanisme de serrage, du mécanisme de rétention et du mécanisme d'accouplement. - La
figure 11A est une vue 3D partielle de la machine à mélange avec la première capsule, pour illustrer le mécanisme de serrage, en position d'insertion. - La
figure 11B est similaire à lafigure 11A , vue d'un autre angle, sauf que certaines pièces ont été retirées pour plus de visibilité. - La
figure 11C est similaire à lafigure 11A , sauf que d'autres pièces ont encore été retirées, en position de serrage. - La
figure 12 est une vue 3D partielle de la machine à mélange, où l'on voit un mode de réalisation du circuit imprimé avec un contrôleur/processeur et une mémoire. - Les
figures 1A et1B représentent un appareil de fabrication 2, selon un premier mode de réalisation de l'invention, configuré pour fabriquer une composition, qui peut par exemple être un produit cosmétique, un produit de soin capillaire, un produit pharmaceutique, un produit phytosanitaire, un produit d'entretien, un produit de nettoyage, ou encore un produit agroalimentaire. Lorsque la composition à fabriquer est un produit cosmétique, ce dernier peut par exemple être une émulsion homogénéisée, une solution homogénéisée ou encore un mélange de plusieurs phases miscibles. - L'appareil de fabrication 2 est destiné à un usage essentiellement personnel et à petite échelle : il permet la préparation de portion unique prête à l'utilisation.
- En conséquence, ses dimensions doivent répondre à des contraintes d'encombrement dans une salle de bain, un salon de beauté, un bagage (pour le transport), etc. Ainsi, l'appareil de fabrication 2 n'a pas de dimension supérieure à 40cm.
- L'appareil de fabrication 2 comprend des moyens de réception configurés pour recevoir des première et deuxième capsules 3, 4, également appelées dosettes ou unités de conditionnement, contenant respectivement une quantité prédéterminée d'une première formulation et une quantité prédéterminée d'une deuxième formulation, et une machine à mélange 6 configurée pour mélanger les première et deuxième formulations contenues dans les première et deuxième capsules 3, 4 reçues dans l'appareil de fabrication 2, de manière à obtenir un produit cosmétique.
- La machine à mélange 6 comprend un logement de réception faisant partie des moyens de réception, et qui sont prévues pour recevoir la première et deuxième capsules 3, 4, directement ou par l'intermédiaire d'un dispositif de réception 5 spécifique.
- Dans un mode de réalisation préférentiel et particulièrement visible sur toutes les
figures 1A ,1B ,7A ,8A ,8B ,8C , la machine à mélange 6 comprend un logement de réception 32 apte à recevoir un dispositif de réception 5 de façon amovible. Le logement de réception 32 a dans ce cas une forme sensiblement complémentaire à celle du dispositif de réception 5. - La machine à mélange 6 comprend en outre un système d'actionnement 35 configuré pour exercer un effort sur les première et deuxième capsules 3, 4, via le dispositif de réception 5 le cas échéant, pour permettre le mélange et le malaxage de la composition à fabriquer.
- Le dispositif de réception 5, aussi appelé navette (car il sert de véhicule pour les première et deuxième capsules 3, 4), a préférablement une forme relativement symétrique, soit parallélépipédique rectangle, soit ovale/ovoïde. On lui définit une direction longitudinale X, qui correspond à la direction selon laquelle il est inséré dans le logement de réception 32. Par conséquent, la direction longitudinale X et la direction d'insertion sont confondues lorsque le dispositif de réception 5 est inséré dans la machine à mélange 6.
- Avantageusement, la machine à mélange 6 est configurée pour mélanger les première et deuxième formulations à l'intérieur du dispositif de réception 5, et de préférence à l'intérieur des première et deuxième capsules 3, 4, sans qu'aucune des formulations n'entrent en contact avec l'appareil de fabrication 2.
- Comme indiqué plus haut, certains modes de réalisation présentés ici sont applicables à un appareil de fabrication 2 sans dispositif de réception 5, c'est-à-dire avec des première et deuxième capsules 3, 4 directement positionnables dans la machine à mélange.
- Avantageusement, la première formulation est une première phase d'un produit cosmétique à fabriquer, telle qu'une phase grasse du produit cosmétique, tandis que la deuxième formulation est une deuxième phase du produit cosmétique, telle qu'une phase aqueuse du produit cosmétique. Par exemple, la phase grasse peut constituer la base du produit cosmétique à fabriquer, et la phase aqueuse peut comprendre des éléments actifs et ainsi constituer un complexe d'actifs du produit cosmétique à fabriquer.
- Les deux capsules pouvant être utilisées dans l'appareil de fabrication 2 présenté, sont décrites en détail dans le document
FR3067911 A1 - Les capsules en tant que telles ne font pas l'objet de la présente invention. On retiendra pour la suite de la description les points suivants.
- Comme montré plus particulièrement sur les
figures 2A ,2B ,3A ,3B ,4A ,4B , les première et deuxième capsules 3, 4 sont distinctes l'une de l'autre, et sont configurées pour être reliées fluidiquement l'une à l'autre. En outre, chacune des première et deuxième capsules 3, 4 est avantageusement à usage unique. - La première capsule 3 comporte un premier compartiment déformable 3.1, de forme bombée, contenant la première formulation, une première partie de connexion 3.2 et un premier passage de liaison 3.3 configuré pour relier fluidiquement le premier compartiment déformable 3.1 et la première partie de connexion 3.2. Avantageusement, le premier passage de liaison 3.3 est formé par un premier canal de liaison. La première partie de connexion 3.2 comporte plus particulièrement un embout de connexion femelle 3.4, par exemple de forme cylindrique, relié fluidiquement au premier passage de liaison 3.3. La première capsule 3 comprend une face plane 3.7 au travers de laquelle passe la partie de connexion 3.2.
- La première capsule 3 comporte en outre un passage de sortie 3.5, tel qu'un canal de sortie, qui est relié fluidiquement au premier passage de liaison 3.3, et qui est pourvu d'un orifice de sortie 3.6. Avantageusement, le passage de sortie 3.5 s'étend dans le prolongement du premier passage de liaison 3.3, et sensiblement parallèlement au premier passage de liaison 3.3. Dans le cas présent, le passage de sortie 3.5 peut être indifféremment monté sur la première capsule 3 ou sur la deuxième capsule 4. En effet, le passage de sortie 3.5 n'est sollicité en fonctionnement qu'une fois que l'appareil de fabrication 2 a été utilisé. La deuxième capsule 4 comporte un deuxième compartiment déformable 4.1, de forme bombée, contenant la deuxième formulation, une deuxième partie de connexion 4.2 configurée pour être connectée à la première partie de connexion 3.2, et un deuxième passage de liaison 4.3 configuré pour relier fluidiquement le deuxième compartiment déformable 4.1 et la deuxième partie de connexion 4.2. Avantageusement, le deuxième passage de liaison 4.3 est formé par un deuxième canal de liaison, et la deuxième partie de connexion 4.2 s'étend sensiblement perpendiculairement par rapport au deuxième passage de liaison 4.3. La deuxième partie de connexion 4.2 comporte plus particulièrement un embout de connexion male 4.4, par exemple de forme cylindrique, relié fluidiquement au deuxième passage de liaison 4.3 et configuré pour recevoir de manière étanche l'embout de connexion femelle 3.4. La deuxième capsule 4 comprend une face plane 4.7 au travers de laquelle passe la deuxième partie de connexion 4.2.
- Les première et deuxième capsules 3, 4 et plus particulièrement les premier et deuxième compartiments déformables 3.1, 4.1 sont chacune fermées par des soudures de liaison assurant l'étanchéité des première et deuxième capsules 3, 4, ces soudures de liaison étant cassables dès qu'une pression seuil est atteinte. Ces pressions seuils peuvent être atteintes dans la machine à mélange 6. A nouveau, ces soudures de liaison sont décrites en détail dans la description du document
FR3067911 A1 - Chacune des première et deuxième capsules 3, 4 est configurée pour contenir la totalité ou sensiblement la totalité d'un mélange formé par la quantité prédéterminée de la première formulation et la quantité prédéterminée de la deuxième formulation. A cet égard, soit les compartiments déformables sont flexibles, soit des zones tampons sont prévus. A nouveau, la description du document
FR3067911 A1 - Comme montré plus particulièrement sur les
figures 2A ,2B ,3A ,3B ,4A ,4B et5 le dispositif de réception 5 est apte à occuper une position ouverte dans laquelle les première et deuxième capsules 3, 4 sont aptes à être introduites dans le dispositif de réception 5, et une position fermée dans laquelle le dispositif de réception 5 est apte à maintenir en position les première et deuxième capsules 3, 4. - Le dispositif de réception 5 prend plus particulièrement la forme d'un boîtier de réception 7 (
figures 2A , 2B) configuré pour recevoir et loger au moins en partie les première et deuxième capsules 3, 4. Le dispositif de réception 5 comporte notamment une première coque 8 de protection et une deuxième coque 9 de protection montées articulées l'une par rapport à l'autre autour d'un axe d'articulation 10 (ou charnière) et entre une première position (voirfigures 2A ,2B ,5 ) correspondant à une position ouverte du dispositif de réception 5 et une deuxième position (voirfigures 4A , 4B) correspondant à une position fermée du dispositif de réception 5. Le dispositif de réception 5 comporte en outre une première partie de support 11 et une deuxième partie de support 12 disposées dans le boîtier de réception 7. Les première et deuxième parties de support 11, 12 comportent respectivement un premier emplacement de réception 13 configuré pour recevoir la première capsule 3 et un deuxième emplacement de réception 14 configuré pour recevoir la deuxième capsule 4. Les première et deuxième coques 8, 9 de protection comportent chacune une ouverture 8.2, 9.2 pour permettre d'accéder aux premier ou deuxième emplacement de réception 13, 14. Ces ouvertures 8.2, 9.2 définissent une face d'insertion du dispositif de réception 5. Le dispositif de réception 5 comprend une face de retrait, opposée à la face d'insertion. - Avantageusement, la première partie de support 11 comporte des cales de réception 15 configurées pour recevoir une portion périphérique de la première capsule 3, et la deuxième partie de support 12 comporte elle aussi des cales de réception 15 configurées pour recevoir une portion périphérique de la deuxième capsule 4. Ces cales de réception 15 définissent en partie les premier et deuxième emplacement de réception 13, 14.
- La première partie de support 11 comprend une première surface de placement 11.1, configurée pour guider (avec contact) et recevoir la face plane 3.7 de la première capsule 3. La première surface de placement 11.1 définit donc en partie le premier emplacement de réception 13.
- De la même façon, la deuxième partie de support 12 comprend une deuxième surface de placement 12.1, configurée pour guider (avec contact) et recevoir la face plane 4.7 de la deuxième capsule. La surface de placement 12.1 définit donc en partie le deuxième emplacement de réception 14.
- Lorsque les première et deuxième capsules 3, 4 sont insérées, leurs faces planes respectives 3.7, 4.7 sont tournées l'une vers l'autre, avec entre elles les deux surfaces de placement 11.1, 12.1.
- Afin d'autoriser le passage des première et deuxième parties de connexion 3.2, 4.2 des première et deuxième capsules 3, 4, les première et deuxième surfaces de placement 11.1, 12.1 comprennent chacune une ouverture de passage 11.2, 12.2, en forme de fente, ouverte vers l'extérieur, selon un axe d'insertion X (
figure 1A ). - Le dispositif de réception 5 comprend en outre une paroi de séparation 22, définissant un plan de séparation (
figures 3A , 3B). La paroi de séparation 22 est située entre les premier et deuxième emplacement de réception 13, 14. Elle est par ailleurs solidaire de la première partie de support 11. La paroi de séparation 22 comprend une ouverture de passage 22.2 afin de permettre aux première et deuxième parties de connexion 3.2, 4.2 d'être positionnées dans le dispositif de réception. L'ouverture de passage 22.2 est sous la forme d'une fente traversante sur l'épaisseur et ouverte sur l'extérieur. - Les ouvertures 11.2, 22.2, 12.2 forment donc un espace pour recevoir les embouts de connexion 3.4, 4.4 des première et deuxième capsules 3, 4.
- On définit par ailleurs une première face d'actionnement 8.1 qui comprend la première coque 8 et la première partie de support 11 et une deuxième face d'actionnement 9.1 qui comprend la deuxième coque 9 et la deuxième partie de support 12.
- Chaque face d'actionnement 8.1, 9.1 intervient dans la transmission des efforts reçus par le dispositif de réception 5 vers les première et deuxième capsules 3, 4. Cela sera expliqué en détail par la suite.
- Selon le mode de réalisation visible sur les
figures 2A ,2B ,3A ,3B ,5 , les première et deuxième coques 8, 9 sont articulées l'une par rapport à l'autre autour de l'axe d'articulation 10 et entre une position de réception (voir lesfigures 2A ,2B ,3A ,3B ) dans laquelle les première et deuxième coques 8, 9 sont éloignées l'une de l'autre et les première et deuxième capsules 3, 4 sont aptes à être reçues respectivement dans les premier et deuxième emplacement de réception 13, 14, et une position de connexion (voirfigures 4A , 4B) dans laquelle les première et deuxième coques 8, 9 sont rapprochées l'une de l'autre et les première et deuxième capsules 3, 4 sont pré-connectées l'une à l'autre. Par pré-connectées l'une à l'autre on entend que l'embout de connexion mâle 4.4 de la deuxième capsule 4 est partiellement introduit dans l'embout de connexion femelle 3.4 de la première capsule 3 sans toutefois qu'une connexion étanche ne soit établie entre ces première et deuxième capsules 3, 4. - Les première et deuxième coques 8, 9 peuvent par exemple présenter un angle d'inclinaison supérieur ou égal à 7°, et par exemple d'environ 7°, lorsqu'elles sont dans la position de réception, et être sensiblement parallèles l'une par rapport à l'autre lorsqu'elles sont dans la position de connexion. Plus précisément, on a deux ensembles principaux seulement articulés l'un par rapport à l'autre : la première coque 8, la première partie de support 11, la paroi de séparation 22 et la deuxième partie de support 12 d'une part ; et la deuxième coque 9, d'autre part.
- Avantageusement, les première et deuxième coques 8, 9 (ou les faces d'actionnement 8.1, 9.1) sont configurées pour engager la première partie de connexion 3.2 dans la deuxième partie de connexion 4.2 lorsque le dispositif de réception 5 est déplacé dans la position fermée. En effet, lorsque les première et deuxième coques 8, 9 sont en position fermées, les parties de connexion 3.2, 4.2 sont partiellement emboitées l'une avec l'autre.
- Les première et deuxième parties de support 11, 12 sont plus particulièrement configurées de telle sorte que les première et deuxième capsules 3, 4 s'étendent sensiblement parallèlement l'une par rapport à l'autre, lorsque les première et deuxième coques 8, 9 sont dans la position de connexion. Comme montré sur les
figures 4A ,4B , la première capsule 3 est configurée pour s'étendre en partie à l'extérieur du dispositif de réception 5 lorsqu'elle est reçue dans le dispositif de réception 5 et que ce dernier est dans la position fermée. Avantageusement, l'orifice de sortie 3.6 est configuré pour s'étendre à l'extérieur du dispositif de réception 5 lorsque la première capsule 3 est reçue dans le dispositif de réception 5 et que ce dernier est dans la position fermée. - L'appareil de fabrication 2 comprend un élément de chauffage 46 (appelé également « élément chauffant ») visible sur les
figures 3A ,3B . Dans le mode de réalisation illustré sur les figures, l'élément de chauffage 46 fait partie du dispositif de réception 5. Toutefois, en l'absence de dispositif de réception 5, ce dernier pourrait être intégré à la machine à mélange. - L'élément de chauffage 46 est attaché à la paroi de séparation 22. Lors de la conception, il a été choisi que l'élément de chauffage 46 soit du côté de la première partie de support 11, ce qui signifie que l'élément de chauffage 46 est monté sur le côté de la paroi de séparation 22 qui est du côté de la première partie de support 11.
- L'élément de chauffage 46 comprend préférablement une ou plusieurs résistances électriques chauffantes 46.1 et une plaque de diffusion 46.2. L'élément de chauffage 46 a ainsi une forme plane pour mieux diffuser la chaleur, si possible avec une superficie d'au moins 500 mm2 et de préférence de l'ordre de 800 mm2.
- Toutefois, comme entre la première capsule 3 et l'élément chauffant 46 se trouve la première partie de support 11, il est prévu dans la première partie de support 11 une ouverture de communication 46.3 qui met en communication directe la face plane 3.7 de la première capsule 3 avec l'élément de chauffage 46 (c'est-à-dire séparés uniquement par de l'air).
- L'élément de chauffage 46 a besoin d'être alimenté en électricité. Préférablement, le dispositif de réception 5 ne comporte pas de batterie propre et doit être alimenté lorsqu'il est inséré dans le logement de réception 32.
- Par conséquent, une connexion électrique est prévue entre le dispositif de réception 5 et la machine à mélange 6.
- Le dispositif de réception 5 comprend la face d'insertion, où se trouve les ouvertures 8.2, 9.2 et qui est la face qui entre la première dans le logement de réception 32, et une face de retrait, opposée, qui est la face visible lorsque le dispositif de réception 5 est inséré dans le logement de réception 32. Le dispositif de réception 5 comprend en outre une première face d'actionnement 8.1 et une deuxième face d'actionnement 9.1, opposées.
- Enfin, le dispositif de connexion 5 comprend une première face de connexion 23 et une deuxième face de connexion 24, préférablement opposées. Dans le mode de réalisation illustré sur les
figures 2A ,2B ,3A ,3B ,4A ,4B , les faces de connexion 23 et 24 correspondent à des faces latérales de l'élément de chauffage 46 et sont donc distinctes des première et deuxième faces d'actionnement 8.1, 9.1 et des faces d'insertion/de retrait. - Les faces de connexion 23, 24 s'étendent entre les faces d'actionnement 8.1, 9.1 du dispositif de réception 5. Préférablement, les faces de connexion 23, 24 relient entre elles les faces d'actionnement 8.1, 9.1 du dispositif de réception 5, c'est-à-dire qu'elles sont contiguës.
- La forme générale du dispositif de réception 5 est choisie de sorte que les faces de connexion 23, 24 sont plus espacées entre elles que les faces d'actionnement 8.1, 9.1 (et que les faces d'insertion/de retrait). En d'autres termes, si on prend le plus petit parallélépipède dans lequel s'insère le dispositif de réception 5, les faces qui touchent les faces de connexion 23, 24 sont plus éloignées que les faces qui touchent les faces d'actionnement 8.1, 9.1 et sont plus proches que les faces qui touchent les faces d'insertion/de retrait. Cela se traduit par le fait que le dispositif de réception 5 est plus large qu'épais (et par ailleurs il est plus haut que large).
- La première face de connexion 23 comprend une première piste de contact électrique 23.1 destiné à alimenter l'élément chauffant 46 et la deuxième face de connexion 24 comprend une deuxième piste de contact électrique 24.1 destiné aussi à alimenter l'élément chauffant 46 (
figures 2A ,3A ,3B ,4A ,4B ). Les pistes de contact électrique 23.1, 24.1 sont donc à l'extérieur du dispositif de réception 5, afin d'être mises en contact avec des pistes complémentaires (figures 2A ,4A ,4B ). - Cette configuration présente plusieurs avantages : d'abord elle assure une connexion électrique simple et efficace. Elle évite également les risques de court-circuit. En effet, si jamais du liquide venait à couler dans le logement de réception 32 (par exemple de l'eau de la douche ou du lavabo ou tout simplement une capsule qui éclate), il est peu probable que les deux pistes de contact électrique 23.1, 24.1 soient touchées en même temps par un même volume de liquide.
- La première face de connexion 23 comprend une portion des première et deuxième coques 8, 9, de la première partie de support 11 et de la paroi de séparation 22.
- En particulier, la première face de connexion 23 comprend une rainure longitudinale 23.2 avec un fond 23.21 et deux parois latérales 23.22, 23.23. La première piste de contact électrique 23.1 est préférablement positionnée sur la paroi latérale 23.22 de la rainure longitudinale 23.2. Dans le mode de réalisation illustré sur les
figures 3A ,3B , le fond 23.21 et la paroi latérale 23.23 sont réalisés par une portion de la première partie de support 11. Une découpe 8.5 adaptée est alors prévue dans la première coque 8 pour laisser place à la rainure longitudinale 23.2. La paroi latérale 23.22 opposée est réalisée par une portion de la paroi de séparation 22. La première piste de contact électrique 23.1 est positionnée alors sur cette paroi latérale 23.22 (car l'élément chauffant 46 est monté sur la paroi de séparation). - De la même façon, une rainure longitudinale 24.2 similaire est prévue sur la deuxième face de connexion 24, avec une découpe 9.5 dans la deuxième coque 9 et un fond 24.21 et deux parois latérales opposées 24.22, 24.23. Du fait du non-centrage des rainures, la découpe 9.5 dans la deuxième coque 9 est nettement moins marquée que la découpe 8.5 dans la première coque 8.
- Les rainures 23.2, 24.2 sont configurées pour s'engager sur des rails complémentaires 31.1, 31.2 respectifs (liaison glissière) prévus dans le logement de réception 32 sur des côtés (préférablement opposées) de connexion (
figures 1A , 7A). Par conséquent, les rainures 23.2, 24.2 forment des dépouilles qui s'étendent sur toute la hauteur de la portion du dispositif de réception 5 où elles se trouvent - à tout le moins jusqu'à la hauteur d'insertion. Les rails complémentaires 31.1, 31.2 contribuent à définir le logement de réception 32 et sont positionnés sur des bords opposés. - Dans un mode de réalisation visibles sur les
figures 4A ,4B notamment, les pistes de contact électrique 23.1, 24.1 ne se situent pas au même niveau, mais sont décalées. - Les pistes de contact électrique 23.1, 24.1 peuvent prendre plusieurs formes : pins électriques, lames métalliques (comme illustré), etc. Les pistes de contact électrique 23.1, 24.1 sont préférablement légèrement déformables pour assurer un contact permanent lorsque le dispositif de réception 5 est mis en place dans le logement de réception 32.
- On remarque ainsi que les rainures longitudinales 23.2, 24.2 ne sont pas centrées par rapport aux première et deuxième faces d'actionnement 8.1, 9.1 (voir notamment
figures 2A ,4A ,4B ). En matière de conception, cela se traduit par une rainure essentiellement formée dans la première partie de support 11 et la première coque 8 de protection. - L'intérêt à cette dissymétrie réside dans une fonction de détrompage. Il est en effet impossible de mettre le dispositif de réception 5 dans le mauvais sens (selon une rotation à 180° autour de l'axe longitudinal X) car les rainures 23.2, 24.2 ne s'inséreraient pas dans les rails 31.1, 31.2 et la deuxième coque 9 viendrait en butée contre ceux-ci.
- Afin d'avoir un effet détrompeur pour une rotation verticale (c'est-à-dire en essayant de mettre la face de retrait en premier au lieu de la face d'insertion), les rainures longitudinales 23.2, 24.2 ne s'étendent pas sur toute la hauteur de la portion de la première ou deuxième coque 8, 9 où elles se trouvent. Par conséquent, sans nécessairement prévoir de pièce spécifique, un effet de butée est obtenu simplement par la partie de la première ou deuxième coque 8, 9 non traversante par l'effet de dépouille. En d'autres termes, la première ou deuxième coque 8, 9 empêche l'insertion des rainures 23.2, 24.2 sur les rails 31.1, 31.2 lorsque le dispositif de réception 5 est dans le mauvais sens.
- De plus, les rainures longitudinales 23.2, 24.2 comprennent chacune une butée d'extrémité 23.3, 24.4, située du côté de la face de retrait. Ces butées d'extrémité 23.3, 24.4 ont un rôle de butée d'insertion, pour définir une position d'insertion maximale dans le logement de réception 32.
- En réalité, il a deux types de butées différentes, mais elles sont situées sensiblement au même endroit : à l'extrémité des rainures longitudinales 23.2, 24.2.
- La première partie de support 11 est privilégiée à la deuxième partie de support 12 pour porter une paroi 23.23, 24.23 de la rainure 23.2, 24.2, à cause de l'élément chauffant 46 qui est destiné à chauffer principalement la première capsule 3.
- En effet, un capteur de température (non visible sur les figures) est accolé à la face arrière de la plaque de diffusion 46.2 pour mesurer la température régnant à proximité du premier emplacement de réception 13 et donc de la première capsule 3.
- Le capteur de température est typiquement une CTN (thermistance à Coefficient de Température Négatif).
- Ce capteur de température 6 doit lui aussi être connecté électriquement à la machine à mélange 6 (en particulier in fine le processeur, pour récupérer les données) et à une batterie 44 équipant la machine à mélange 6, pour l'alimenter. A cette fin, une première piste de contact électrique supplémentaire 46.51 est prévue au niveau de la première face de contact 23. Cette première piste de contact électrique supplémentaire 46.51 est distincte de la première piste de contact électrique 23.1. Plus précisément, la première piste de contact électrique supplémentaire 46.51 est prévue dans la première rainure 23.2, sur la paroi latérale 23.23, c'est-à-dire la paroi latérale formée par la première partie de support 11.
- D'une façon similaire, une deuxième piste de contact électrique supplémentaire 46.52 est prévue dans la deuxième rainure 24.2.
- Les deux pistes de contact électrique supplémentaire 46.51, 46.52 sont elles aussi avantageusement décalées. Dans un exemple spécifique, la piste de contact électrique supplémentaire 46.51 et la piste de contact électrique 24.1 sont au même niveau et la piste de contact électrique supplémentaire 46.52 et la piste de contact électrique 23.1 sont au même niveau.
- Les
figures 2A ,3A ,3B ,4A ,4B ,5 illustrent ces pistes. - Le dispositif de réception 5 comporte un détrompeur 17 pour s'assurer que les première et deuxième capsules 3, 4 soient correctement positionnées, c'est-à-dire que les « bonnes » capsules 3, 4 soient mises dans les « bons » emplacements de réception 13, 14 (visible distinctement sur les
figures 2A , 5). Le détrompeur 17 est préférablement situé à l'extrémité des ouvertures de passage 11.2, 12.2, pour bloquer le passage indésiré d'un embout de connexion 3.2, 4.2 non désiré. - Le détrompeur 17 comprend au moins un battant 17.1 s'ouvrant vers l'extérieur du dispositif de réception 5 (préférablement deux, de chaque côté comme illustré sur les figures; préférablement, les deux battants 17.1 ont une configuration saloon, c'est-à-dire articulées par des charnières vers l'extérieur du dispositif de réception 5).
- En particulier, le détrompeur 17 remplit deux rôles distincts.
- Le battant 17.1 comprend une ouverture 17.2 de forme complémentaire à l'embout de connexion femelle 3.4 de la première capsule 3 afin d'autoriser son insertion dans l'ouverture 8.2. De plus, le battant 17.1 comprend une butée 17.3, qui contribue à définir l'ouverture 17.2, afin d'empêcher l'insertion dans l'ouverture 8.2 de la deuxième partie de connexion 4.2, plus long transversalement que la première partie de connexion 3.2. En effet, si on essaie d'insérer la deuxième capsule 4 dans le premier emplacement de réception 13, l'extrémité de la deuxième partie de connexion 4.2, c'est-à-dire une partie de l'embout de connexion mâle 4.4 vient cogner contre la butée 17.3.
- Pour l'accession au deuxième emplacement de réception 14, le détrompeur 17 le bloque lorsque le dispositif de réception 5 est en position fermée : l'ouverture de passage 12.2 est bloquée, préférablement par la butée 17.3 aussi. En revanche, lorsque le dispositif de réception 5 est en position ouverte, c'est-à-dire que la deuxième coque 9 a tourné sur sa charnière, l'ouverture de passage 12.2 est libérée.
- Enfin, comme le battant 17.1 s'ouvre vers l'extérieur, il est fonctionnellement non bloquant lors de l'extraction des première et deuxième capsules 3, 4 (les deux à la fois, car elles sont attachées) du dispositif de réception 5.
- Le détrompeur 17 peut être attaché à la première partie de support 11 ou à la deuxième partie de support 12 (comme sur les figures), en fonction de la conception du mouvement relatif des pièces : si la deuxième partie de support 12 est attaché à la deuxième coque 9 (et donc mobile en rotation par rapport à la première partie de support 11), alors il est préférable d'attacher le détrompeur à la première partie de support 11. Autrement dit, cela est indifférent.
- Des ressorts de rappel 17.4 maintiennent le détrompeur 17 en position par défaut, c'est-à-dire fermée.
- Comme montré notamment sur les
figures 2B ,3A ,3B ,5 le dispositif de réception 5 comporte en outre un premier élément d'appui 19 configuré pour pénétrer à l'intérieur du deuxième emplacement de réception 14, c'est-à-dire pour exercer un effort de pression sur la première capsule 3, et plus particulièrement sur le premier compartiment déformable 3.1, et un deuxième élément d'appui 21 configuré pour pénétrer à l'intérieur du premier emplacement de réception 13, c'est-à-dire pour exercer un effort de pression sur la deuxième capsule 4, et plus particulièrement sur le deuxième compartiment déformable 4.1. - Le premier élément d'appui 19 (respectivement le deuxième élément d'appui 21) est monté préférablement sur la première partie de support 11 (respectivement la deuxième partie de support 12) et est déplaçable entre une position inactive, ou dite position déployée, dans laquelle le premier ou deuxième emplacement de réception 13, 14 est accessible pour la première ou deuxième capsule 3, 4 (voir la
figure 2B ,3A ,3B ) et une position active ou dite position repliée, dans laquelle le premier élément d'appui 19 (respectivement le deuxième élément d'appui 21) pénètre à l'intérieur du premier emplacement de réception 13 (respectivement le deuxième emplacement de réception 14), c'est-à-dire qu'il est apte à exercer un effort de pression sur le premier compartiment déformable 3.1 de la première capsule 3 (respectivement le deuxième compartiment déformable 4.1 de la deuxième capsule 4). - Le premier élément d'appui 19 (respectivement le deuxième élément d'appui 21) est avantageusement monté mobile en rotation autour d'une charnière 19.1 (respectivement la charnière 21.1). La charnière 19.1 (respectivement la charnière 21.1) est situé à l'opposé de l'ouverture 8.2 (respectivement la charnière 8.1) de la première coque 8 (respectivement la deuxième coque 9). Les charnières 19.1, 21.1 sont donc toutes deux situées à proximité de la face de retrait du dispositif de réception 5.
- Les éléments d'appui 19, 21 présentent chacun une face interne plane 19.2, 21.2 pour former des palettes mobiles en rotation. Chaque face interne plane 19.2, 21.2 coopère avec sa première ou deuxième capsule 3, 4 respective. A mesure qu'on appuie sur les éléments d'appui, le volume entre la palette et la surface de placement 11.1, 12.1 diminue progressivement et continûment. Lorsque la première ou deuxième capsule 3, 4 est installée, l'orifice de sortie 3.6 et les parties de connexion 3.2, 4.2 sont situées du côté opposé à la charnière 10 : cela permet de chasser efficacement la crème de la première ou deuxième capsule 3, 4 en évitant toute zone de rétention non désirée à l'intérieur de celle-ci.
- Pour tenir les éléments d'appui 19,21 en position ouverte par défaut (c'est-à-dire lorsque le dispositif de réception 5 n'est pas actionnée ou quand la deuxième coque 9 est en position pivotée), des moyens de rappels 21.3, comme des ressorts, sont prévus, prenant appui contre la première ou deuxième coque 8, 9 (
figure 5 ). Les moyens de rappels 21.3 peuvent tendre à pousser la palette qui s'étend légèrement de l'autre côté de la charnière 21.1. - En utilisation, comme cela sera décrit par la suite, les deux éléments d'appui 19, 21 sont activés successivement pour permettre le malaxage de la crème. La crème transite alors d'une première ou deuxième capsule 3, 4 à l'autre deuxième ou première capsule 4, 3.
- Préférablement, pour optimiser le fonctionnement de la palette, la charnière 19.1 (respectivement la charnière 21.1) définit un axe de rotation compris dans le plan de la surface de placement 11.1 (respectivement la surface de placement 12.1) et orthogonal à l'axe longitudinal du dispositif de réception 5. En l'absence de capsule, la face interne 19.2, 21.2 peut être plaquée contre la surface de placement 11.1, 12.1.
- De la même façon, la charnière 19.1, 21.1 est préférablement située juste à l'extrémité du premier ou deuxième emplacement de réception 13, 14.
- Afin de déplacer les éléments d'appui 19, 21, les première et deuxième coques 8, 9 comprennent chacune, préférablement en regard de la partie extrémale de la palette (pour profiter de l'effet de levier et minimiser l'effort à appliquer), un point d'appui 8.3, 9.3, configuré pour recevoir un effort extérieur, décrit plus en détail plus loin. Le point d'appui 8.3, 9.3 est attaché à une zone souple 8.4, 9.4, qui peut se déformer (en élastomère, etc.). La zone souple 8.4, 9.4 est elle-même attachée au reste de la première ou deuxième coque 8, 9, réalisée dans un plastique plus rigide.
- Le point d'appui 8.3, 9.3 est dans un matériau rigide (plastique typiquement). Alternativement (non illustré), les première et deuxième coques 8, 9 présentent deux orifices, préférablement en regard de la partie extrémale de la palette, afin de permettre une accession libre aux éléments d'appui 19, 21.
- Un utilisateur peut, à une main, saisir le dispositif de réception 5 et appuyer sur les points d'appui 8.4, 9.4 simultanément, par exemple avec le pouce et l'index/majeur. Une pression simultanée permet de diriger la crème des première et deuxième capsules 3, 4 vers l'orifice de sortie 3.6.
- Dans un autre mode de réalisation non illustré, où le dispositif de réception 5 est intégré à la machine à mélange 6, les palettes peuvent être directement intégré dans la machine à mélange 6.
- Afin d'empêcher le dispositif de réception 5 d'être retiré du logement de réception 32 lorsque le procédé de mélange est en cours, un mécanisme de rétention 50, décrit en détail plus loin, est prévu dans l'appareil de fabrication 2. Pour que le mécanisme de rétention 50 ait une prise sur le dispositif de réception 5, une butée de rétention 9.6 est prévue sur une des première ou deuxième coques 8, 9 (la deuxième coque 9 sur les
figures 2A ,2B ,3A ,3B ,4B ,5 ). Cette butée de rétention 9.6 correspond essentiellement à une saillie s'étendant radialement, c'est-à-dire dans un plan orthogonal à la direction longitudinale X. Elle peut se trouver à n'importe quel emplacement le long de la hauteur du dispositif de réception 5. Dans l'exemple de réalisation illustré, la butée de rétention 9.6 est disposée à proximité de la face d'insertion. - Une autre butée peut être prévue sur l'autre coque, pour des raisons d'ergonomie par exemple.
- Afin de permettre à l'utilisateur d'attraper le dispositif de réception 5 lorsqu'il est inséré dans le logement de réception 32, des poignées de préhension 8.7, 9.7 sont prévues sur chacune des première et deuxième coque 8, 9 de protection (visible notamment sur les
figures 1 ,2B ,4A ,4B ). Ces poignées de préhension 8.7, 9.7 sont situées au niveau de la face de retrait, qui est celle accessible lorsque le dispositif de réception 5 est en place. - La poignée de préhension 8.7, 9.7 peut simplement être constituée en une saillie s'étendant radialement, c'est-à-dire dans un plan orthogonal à la direction longitudinale X, suffisamment longue pour qu'une partie de la phalange de l'utilisateur puisse tirer dessus.
- Comme indiqué précédemment, les faces d'actionnement 8.1, 9.1, et plus spécifiquement les première et deuxième coques 8, 9 de protection comportent chacune un point d'appui 8.3, 9.4, pour transférer l'effort vers les éléments d'appui 19, 21 à l'intérieur. Ces points d'appui 8.3, 9.4 sont formées dans une zone souple 8.4, 9.4.
- Lorsque le dispositif de réception 5 passe en position fermée, les embouts de connexion 3.4, 4.4, viennent en regard l'un de l'autre et s'emboitent partiellement. Pour créer une communication fluidique étanche et fiable entre les première et deuxième capsules 3, 4, il est prévu un mécanisme d'accouplement 52 dans l'appareil de fabrication 2. Ce mécanisme d'accouplement 52 exerce une force en direction du dispositif de réception 5. Ce mécanisme d'accouplement 52 permet à la fois d'établir la connexion fluidique entre les première et deuxième capsules 3, 4 sous l'effet de la force exercée par le mécanisme d'accouplement 52 mais également d'éviter toute déconnexion indésirée des première et deuxième capsules 3, 4 sous l'effet des pressions générées par le malaxage des première et deuxième capsules 3, 4. Il sera décrit par la suite.
- Une des première ou deuxième coques 8, 9 de protection (voire les deux), comprend un bouton d'accouplement 9.8, mobile en direction du deuxième emplacement de réception 14 (
figures 2A ,2B ,3A ,3B ,4A ,4B ,5 ). Plus précisément, il est mobile en direction d'une zone proche de l'ouverture 9.2, puisque le bouton d'accouplement 9.8 est destiné à appuyer sur la deuxième capsule 4 à proximité de la portion de connexion 4.2. A cet égard, le bouton d'accouplement 9.8 est attaché à une zone souple, qui peut être la zone souple 9.4 du point d'appui 9.3. On note ici que le bouton d'accouplement 9.8 est distinct du point d'appui 9.3. - Le bouton d'accouplement 9.8 est préférablement rigide pour mieux transmettre la force du mécanisme d'accouplement 52 aux première et deuxième capsules 3, 4, qui sont donc maintenues couplées.
- Comme montré plus particulièrement sur les
figures 6 ,7A ,7B ,8A ,8B ,8C ,9 ,10A ,11A, 11B ,11C , la machine à mélange 6 comporte un support 31, et un logement de réception 32 défini au moins en partie par le support 31 et configuré pour recevoir au moins en partie le dispositif de réception 5. Selon le mode de réalisation représenté sur lesfigures 1A ,1B , la machine à mélange 6 et le dispositif de réception 5 sont configurés de telle sorte que le dispositif de réception 5 s'étend au moins en partie à l'extérieur de la machine à mélange 6, lorsque le dispositif de réception 5 est reçu dans le logement de réception 32. Le support 31 se comporte comme une base, c'est-à-dire qu'il définit un ensemble d'éléments fixes lorsque la machine à mélange 6 est posée sur un support (table, plan de travail, ...), peu importe qu'elle soit en utilisation ou non. Le support 31 de la machine à mélange 6 comporte également une coque externe 33 et une ouverture d'insertion 34 débouchant dans le logement de réception 32, le dispositif de réception 5 étant configuré pour être inséré dans le logement de réception 32 à travers l'ouverture d'insertion 34. Avantageusement, l'ouverture d'insertion 34 est ménagée dans une portion centrale d'une surface supérieure de la base 33, et est configurée pour être orientée vers le haut lorsque la machine à mélange 6 est disposée sur une surface de support horizontale (table, plan de travail, ...). - La base 33 fait aussi office d'enveloppe extérieure, avec le design souhaité pour la machine à mélange. La base 33 peut comprendre une base inférieure et une base supérieure.
- La machine à mélange 6 comporte en outre un système d'actionnement 35 montée pivotant sur le support 31 autour d'un axe de pivotement 36 sensiblement vertical lorsque la machine à mélange 6 est disposée sur une surface de support horizontale (table, plan de travail, ...) (
figures 6 ,8A ,8B ,8C ,9 ,10A ). Préférablement, le système d'actionnement 35 effectue des mouvements de va-et-vient autour de l'axe de pivotement 36 selon un débattement angulaire maximal de 45°. Le mouvement est donc composé d'une rotation à +45°C maximum puis d'une rotation à -45°, et ainsi de suite. Son déplacement se fait selon une course nominale C35 (non représentée sur les figures), qui, dans le cas de la rotation autour de l'axe de pivotement 36, est associé au débattement angulaire maximal. La course nominale C35 du système d'actionnement 35 se définit comme la course entre deux positions extrêmes dudit système d'actionnement 35. Une position neutre du système d'actionnement 35 est définie entre ces deux positions extrêmes, la position neutre du système d'actionnement 35 correspondant à une position d'insertion dans laquelle le dispositif de réception 5 peut être positionné à l'intérieur du logement de réception 32 de la machine à mélange 6 sans être gêné par le système d'actionnement 35. - La machine à mélange 6 comporte de plus un moteur d'entraînement 39 monté sur le support 31. Le moteur d'entraînement 39 est configuré pour faire pivoter le système d'actionnement 35 autour de l'axe de pivotement 36 et dans une plage angulaire prédéterminée. Préférablement, le moteur d'entrainement 39 ne tourne que dans un seul sens.
- Le système d'actionnement 35 comporte un premier organe d'actionnement 37, qui peut comprendre un premier doigt d'actionnement 37.1, configuré pour transmettre un effort de pression à la première capsule 3, et un deuxième organe d'actionnement 38, qui peut comprendre un deuxième doigt d'actionnement 38.1, opposé au premier organe d'actionnement 37 et configuré pour transmettre un effort de pression à la deuxième capsule 4.
- Les premier et deuxième organes d'actionnement 37, 38 sont configurés pour être disposés de part et d'autre du logement de réception 32 et donc du dispositif de réception 5 lorsque ce dernier est reçu dans la machine à mélange 6, et plus précisément dans le logement de réception 32.
- Les organes d'actionnement 37, 38 ont au moins une position dans laquelle ils sont au moins partiellement à l'intérieur du logement de réception 32. Dans la position neutre du système d'actionnement 35, les organes d'actionnement 37, 38 sont agencés par rapport au logement de réception 32 de sorte à permettre au dispositif de réception 5 d'être positionné à l'intérieur du logement de réception 32 de la machine à mélange 6 ; c'est la position d'insertion.
- Les premier et deuxième organes d'actionnement 37, 38 sont plus particulièrement configurés pour exercer des efforts de pression respectivement et alternativement sur les premier et deuxième éléments d'appui 19, 21, de manière à transmettre des efforts de pression respectivement et alternativement sur les premier et deuxième compartiments 3.1, 4.1. En particulier, les premier et deuxième organes d'actionnement 37, 38 sont configurés pour coopérer respectivement avec les première et deuxième points d'appui 8.3, 9.3 des première et deuxième coques 8, 9 de protection, ou directement sur les éléments d'appui 19, 21.
- On définit une course d'actionnement C37 pour le premier organe d'actionnement 37 et une course d'actionnement C38 pour le deuxième organe d'actionnement 38.
- La course d'actionnement C37 se définit comme la course du premier organe d'actionnement 37 entre la position neutre du système d'actionnement 35 et la position d'actionnement maximale du premier organe d'actionnement 37, dans laquelle le premier organe d'actionnement 37 est en compression maximale sur le premier élément d'appui 19.
- Réciproquement, la course d'actionnement C38 se définit comme la course du deuxième organe d'actionnement 38 entre la position neutre du système d'actionnement 35 et la position d'actionnement maximale du deuxième organe d'actionnement 38, dans laquelle le deuxième organe d'actionnement 38 est en compression maximale sur le deuxième élément d'appui 21.
- Préférentiellement, le mouvement du système d'actionnement 35 peut être suivi à l'aide de différents capteurs, et en particulier des capteurs à effet Hall. Plus précisément, chacun desdits premier organe d'actionnement 37 et deuxième organe d'actionnement 38 peuvent comporter un aimant destiné à interagir avec un capteur à effet Hall fixe. Avantageusement, le capteur à effet Hall peut être directement disposé sur une unité de contrôle 45 qui sera décrite par la suite, comme on peut le voir sur la
figure 12 . Il est ainsi possible pour l'unité de contrôle 45 de suivre le mouvement du système d'actionnement 35, et même de chacun des premier et deuxième organe d'actionnement 37, 38. Il est même envisageable, pour l'unité de contrôle 45, de connaitre avec précision la position de chacun des premier et deuxième organe d'actionnement au sein de leurs courses d'actionnement respectives C37, C38, par exemple en disposant plusieurs capteurs à effet Hall. - Selon le mode de réalisation représenté sur les
figures 1 à 22, les premier et deuxième organes d'actionnement 37, 38 s'étendent sensiblement dans un même plan d'extension, et convergent à l'opposé de l'axe de pivotement 36. - Comme illustré sur les
figures 6 ,8A ,8B ,8C, 9 , le système d'actionnement 35 présente une forme sensiblement annulaire définissant une ouverture autour du logement de réception 32. Dans un mode de réalisation, le système d'actionnement 35 est formé essentiellement d'une seule pièce, comprenant une ouverture pour recevoir un arbre définissant l'axe de pivotement 36. - Le premier organe d'actionnement 37 et le deuxième organe d'actionnement 38 sont chacun disposés sur des côtés opposés du système d'actionnement 35. Par conséquent, on a un système d'actionnement 35 s'étendant sur deux fois deux faces opposées deux à deux : les organes d'actionnements 37, 38, l'ouverture pour l'axe de pivotement 36 et le mécanisme d'entrainement avec rainure qui est décrit par la suite.
- Les organes d'actionnement 37, 38 peuvent comprendre chacun un support d'entrainement 37.3, 38.3, qui se rejoignent d'un côté au niveau de l'axe de pivotement 36. De l'autre côté, on définit une portion de connexion 36.1, qui relie les deux supports d'entrainement 37.3, 38.3. La portion de connexion 36.1 peut être attachée ou venue de matière avec les supports d'entrainement 37.3, 38.3.
- Préférablement, les deux organes d'actionnement 37, 38 tournent autour du même axe de pivotement 36. Dans ce cas, on privilégie deux supports d'entrainement 37.3, 38.3 solidaire en rotation.
- Toutefois, il est possible de prévoir un axe de pivotement pour chacun des organes d'actionnement 37, 38 ; quelques adaptations simples devront toutefois être apportées.
- Alternativement, dans un mode de réalisation non représenté, les organes d'actionnement sont mobiles en translation.
- Le système d'actionnement 35 bouge le long d'une course nominale C35 pour exercer un effort sur le dispositif de réception 5.
- Néanmoins, les jeux dans la chaine cinématique, liées aux tolérances de fabrication, peuvent perturber la transmission des efforts en décalant le positionnement du système d'actionnement 35. Ainsi, une fois en bout de course, il se peut qu'il manque quelques millimètres ou à l'inverse qu'il y ait quelques millimètres en trop. Cela peut provoquer une compression insuffisante ou à l'inverse casser l'appareil de fabrication 2.
- Pour pallier à cela, le système d'actionnement 35 peut comprendre un ressort 37.4, 38.4 (particulièrement visibles en
figures 8A, 8B ,8C ). En particulier, le ressort 37.4, 38.4 est configuré pour se comprimer lorsque le système d'actionnement 35 arrive au voisinage de sa fin de course nominale C35 et que le doigt d'actionnement 37.1, 38.1 est en butée contre la face plane 3.7,4.7 de la capsule. Le ressort 37.4, 38.4 génère donc un effort tendant à écarter l'organe d'actionnement 37, 38 du dispositif de réception 5. - Plus précisément, chaque organe d'actionnement 37, 38 comprend un ressort 37.4, 38.4.
- Le ressort 37.4, 38.4 peut être situé à différents endroits. Dans un mode de réalisation non illustré, le ressort 37.4, 38.4 est situé à l'extrémité « libre » du doigt 37.1, 38.1.
- Dans un autre mode de réalisation, préféré car le ressort est masqué, le ressort 37.4, 38.4 est monté entre le doigt 37.1, 38.1 et le support d'entrainement 37.3, 38.3. De la sorte, l'utilisateur ne peut pas y accéder car le ressort est derrière la base.
- Pour mettre le ressort à cet endroit, il est commode de prévoir pour chaque organe d'actionnement 37, 38 un bras 37.2, 38.2, monté mobile par rapport au support d'entrainement 37.3, 38.3. Le doigt 37.1, 38.1 est alors monté solidairement au bras 37.2, 38.2.
- Dans le mode de réalisation illustré notamment sur les
figures 8A, 8B ,8C, 9 , le bras 37.2, 38.2 est mobile en rotation par rapport au support d'entrainement 37.3, 38.3 par une charnière 37.5, 38.5. Le ressort 37.4, 38.4 est positionnée entre le bras 37.2, 38.2 et le support d'entrainement 37.3, 38.3. - Le ressort 37.3, 38.3 travaille donc en compression, en ce sens que sa position à vide, ou position non contrainte, n'est pas comprimée. Il est comprimé dans la direction de la translation ou de la rotation de l'organe d'actionnement 37, 38.
- Le ressort 37.3, 38.3 peut être de type hélicoïdal, à lame, voire comprend un matériau élastique ou un assemblage élastique (élastomère, bulle de gaz, etc.).
- Selon le mode de réalisation représenté sur les
figures 6 ,8A ,8B ,8C, 9 , la machine à mélange 6 comporte également une came 41, sous forme d'une roue d'entraînement ou un bras, solidaire en rotation d'un arbre de sortie 39.1 du moteur d'entraînement 39 et configurée pour être entraînée en rotation autour de son axe 41.1 de rotation de came. La came 41 est montée sur le support 31. Pour autoriser le mouvement de va-et-vient avec un bras de levier important, il est préférable que l'axe de pivotement 36 et la came 41 soient de part et d'autre du logement de réception 32. - La came 41 est équipée d'un doigt d'entraînement 42 qui est excentré par rapport à l'axe 41.1 de rotation de came.
- La came 41 est typiquement entrainée par le moteur d'entrainement 39 à l'aide d'une ou plusieurs courroies. En l'occurrence la chaine cinématique est la suivante, à partir du moteur d'entrainement 39 et son arbre de sortie 39.1 sur lequel est montée une poulie : une courroie 39.2, une poulie 39.3 reliée à une poulie 39.4 par un arbre, une courroie 39.5, la came 41.
- Le doigt d'entrainement 42 est reçu dans une rainure d'entrainement 43 prévue sur le système d'actionnement 35. En particulier, la rainure d'entrainement 43 est construite dans la portion de connexion 36.1. La rainure d'entrainement 43 est allongée et s'étend selon une direction d'extension sensiblement parallèle à l'axe de pivotement 36. Une telle configuration de la machine à mélange 6 permet d'obtenir un mouvement alternatif du système d'actionnement 35 en faisant tourner le moteur d'entraînement 39 toujours dans le même sens de rotation, de sorte qu'il n'est pas nécessaire de faire appel à un système de commande couteux du moteur d'entraînement 39.
- La rainure d'entrainement 43 s'étend, selon sa profondeur, en direction de l'axe de pivotement 36.
- A présent, la liaison entre la rainure d'entrainement 43 et le doigt d'entrainement 42 va être décrite. Etant donnée la rotation du système d'actionnement 35, l'alignement de la rainure d'entrainement 43 et du doigt d'entrainement 42 est variable, ce qui signifie qu'un simple ajustement bloquerait le système. Inversement, la présence de jeu, qui autoriserait le désalignement, génère du bruit et donne un temps de retard à chaque fin de course.
- Pour résoudre cela, il est prévu une liaison rotule entre le doigt d'entrainement 42 et la rainure d'entrainement 43, qui permet de gérer le désalignement précédent.
- En particulier, sur le doigt d'entrainement 42 est montée une bille 42.1, qui est logée dans une bague 43.1. La liaison entre la bille 42.1 et la bague 43.1 est une liaison rotule. La bague 43.1 est quant à elle reçue dans la rainure d'entrainement 43 où elle est montée mobile en translation selon une direction parallèle à l'axe de pivotement 36 (donc selon la longueur de la rainure d'entrainement 43). Enfin, la bille 42.1 est montée mobile en translation le long du doigt d'entrainement 42. L'agencement de ces différentes liaisons peut être différent, en ce sens que la bague peut aussi être mobile en translation le long de la profondeur de la rainure et la bille est alors fixe sur le doigt d'entrainement.
- Par conséquent, la liaison complète entre le doigt d'entrainement 42 et le système d'actionnement 35 comprend en série une glissière, une rotule, une glissière perpendiculaire à l'autre glissière. En conséquence, dans un torseur cinématique, on remarque que l'effort n'est transmissible que sur une des six composantes du torseur, à savoir celle de la translation tangente au mouvement de rotation du système d'actionnement 35, c'est-à-dire celle qui permet la mise en rotation du système d'actionnement 35. L'équivalent cinématique est la liaison sphère-plan (aussi appelée liaison ponctuelle).
- Pour que la liaison décrite précédemment ne soit pas inutilement plus complexe, l'axe de rotation de came 41.1 et l'axe de pivotement 36 sont de préférence orthogonaux. Cela permet d'avoir un doigt d'entrainement 42 qui décrit un mouvement circulaire dans un plan parallèle à l'axe de pivotement 36.
- Certains mouvements prévus des liaisons peuvent se faire simplement par glissement plastique/plastique, dont l'usure est suffisamment lente pour assurer une durée de vie satisfaisante.
- Selon une variante de réalisation de l'invention, la machine à mélange 6 pourrait être configurée de telle sorte qu'une rotation du moteur d'entraînement 39 dans un premier sens de rotation entraîne un pivotement de la partie d'actionnement 35 dans un premier sens de pivotement et qu'une rotation du moteur d'entraînement 39 dans un deuxième sens de rotation, opposé au premier sens de rotation, entraîne un pivotement de la partie d'actionnement 35 dans un deuxième sens de pivotement, opposé au premier sens de pivotement.
- Les organes d'actionnement 37, 38 se déplacent chacun selon une course d'actionnement C37, C38.
- Néanmoins, dans le mode de réalisation illustré sur les figures, un des deux organes d'actionnement 37, 38 a une course d'actionnement C37, C38 de longueur strictement supérieure à celle de l'autre organe d'actionnement.
- Cette différence de course d'actionnement C37, C38 permet de mieux gérer mécaniquement et électriquement l'effort à fournir pour déformer la première capsule 3 par rapport à la deuxième capsule 4. En effet, comme illustré sur la
figure 2B , la première capsule 3 présente une épaisseur supérieure à la deuxième capsule 4, ce qui signifie que davantage d'espace est nécessaire du côté de la capsule la plus épaisse et que l'élément d'appui 19 sera plus rapidement en contact et commencera à travailler plus rapidement que l'élément d'appui 21. - Pour réaliser cette différence de course, plusieurs solutions sont envisageables. Une solution consiste à avoir une rainure d'entrainement 43 non centrée dans la portion de connexion 36.1.
- Une autre solution, illustrée en particulier en
figures 8A, 8B ,8C, 9 consiste à décentrer l'axe de pivotement 36. En d'autres termes, l'axe de rotation de came 41.1 ne recoupe pas l'axe de pivotement 36. Cela induit une différence de course entre les deux organes d'actionnement 37, 38 lorsque la came 41 effectue un tour complet. Une distance (orthogonale, c'est-à-dire par projection orthogonale) entre l'axe de rotation de came 41.1 et l'axe de pivotement 36 de 1% à 5% de la distance entre la rainure d'entrainement 43 et l'axe de pivotement 36 suffit et ne perturbe pas trop l'aspect symétrique de l'ensemble. Dans l'absolu, une distance comprise entre 1 et 2mm convient. - Le décentrement peut aussi être défini à l'aide du logement de réception 32 par rapport à l'axe de rotation de la came 41 : ainsi les positions extrémales du système d'actionnement 35 ne sont pas centrées autour du logement de réception 32.
- Le décentrement peut aussi être défini par rapport aux première et deuxième surfaces de placement 11.1, 12.1 ou par rapport à l'emplacement des première et deuxième capsules 3, 4 au sein du logement de réception 32 : à l'aide des faces planes 3.7, 4.7, qui définissent donc des plans artificiels dans le logement de réception 32. La distance maximale du premier organe d'actionnement 37 audit plan de la face plane 3.7 est supérieure à la distance maximale du deuxième organe d'actionnement 38 par rapport à la face plane 4.7.
- A cet égard, dans une variante, l'axe pivotement 36 est compris dans un plan situé à équidistance des deux surfaces de placement 11.1, 12.1.
- En réaction au décentrement, le premier doigt d'actionnement 37.1 est avantageusement plus long que le deuxième doigt d'actionnement 38.1. Cela est notamment dû au fait qu'il faille compenser la position extrémale des doigts d'actionnement 37.1, 38.1 dû au décentrement. Plus exactement, le doit d'actionnement 37.1, 38.1 qui travaille sur la première ou deuxième capsule 3, 4 la plus épaisse, présente une longueur plus importante que l'autre doigt d'actionnement 38.1, 37.1.
- Une autre solution, qui est illustrée en
figure 8A , consiste à ne pas définir la position neutre du système d'actionnement 35 lors d'un point mort haut ou bas de la came 41. En effet, en choisissant la position neutre du système d'actionnement 35 à un angle Ag non nul (typiquement Ag est compris entre 5° et 30°) par rapport à midi (quand la machine à mélange 6 est posée sur un support horizontal), on décale la répartition des courses d'actionnement C37, C38. On note par ailleurs qu'on obtient de fait une autre position neutre pour un angle Ag' correspondant à Ag'=180°-Ag. - En effet, les courses d'actionnement C37, C38 correspondent, au niveau de la came 41, à la rotation depuis ledit angle Ag jusqu'à la rotation à 90° la plus proche (c'est-à-dire 3h ou 9h, quand la machine à mélange 6 est posée sur un support horizontal) et ensuite à la rotation depuis ledit angle Ag' jusqu'à la rotation à 270°. Comme Ag et Ag' ne sont pas à 0 et 180° (midi et 6h), on remarque immédiatement que les courses C37 et C38 ne sont pas égales. Sur une rotation complète de la came 41, on a donc parcouru la première course d'actionnement C37 dans un premier sens puis la première course d'actionnement C37 dans un deuxième sens, puis la deuxième course d'actionnement C38 dans un premier sens puis la première course d'actionnement C38 dans un deuxième sens, c'est-à-dire deux fois la course nominale C35.
- Comme mentionné précédemment, la machine à mélange 6 comprend elle aussi des pistes de contact électrique 31.11, 31.12 configurées pour s'engager avec les pistes de contact électrique 23.1, 24.1 des rainures longitudinales 23.2, 24.2 du dispositif de réception 5 et des pistes de contact électrique 31.51, 31.52 configurées pour s'engager avec les pistes de contact électrique supplémentaires 46.51, 46.52 des rainures longitudinales 23.2, 24.2.
- Ces pistes de contact électrique sont montées sur les rails 31.1, 31.2 (
figures 1A , 7A) , qui sont solidaires du support 31 et qui sont montés sur deux côté de connexion du logement de réception 32. L'emplacement des pistes de contact électrique 31.11, 31.12 (et aussi 31.51, 31.52) sur les rails 31.1, 31.2 est complémentaire de l'emplacement des pistes de contact électriques 23.1, 24.1 (et aussi 46.51, 46.52) des faces de connexion 23, 24 du dispositif de réception 5. Les rails 31.1, 31.2 contribuent à définir le logement de réception 32. Ils sont par exemple situés sur le bord et sont préférablement fixés sur toute leur longueur au support 31. - L'emplacement des pistes de contact électrique 31.51, 46.51 et 31.52, 46.52 sur deux rails 31.1, 31.2 opposés, situés à distance l'un de l'autre, présente l'avantage de limiter les risques de court-circuit si jamais du liquide venait à couler par gravité sur l'un des rails 31.1, 31.2.
- La machine à mélange 6 comprend en outre un mécanisme de rétention 50, un mécanisme d'accouplement 52 et un mécanisme de serrage 54 (
figures 10A, 10B ,10C, 10D ,10E ,10F ,11A, 11B ,11C ). - Chacun de ces mécanismes a une fonction propre et indépendante. Toutefois, ils peuvent avantageusement être entrainés simultanément par un même moteur auxiliaire 40.
- Le mécanisme de rétention 50 a pour fonction d'empêcher l'enlèvement du dispositif de réception 5 lorsque le mélange est en cours.
- Le mécanisme de rétention 50 est monté mobile par rapport au support 31 entre une position d'insertion et une position de rétention. Dans la position d'insertion, le mécanisme de rétention 50 permet l'insertion et le retrait du dispositif de réception 5 par rapport à la machine à mélange 6. Dans la position de rétention, le mécanisme de rétention 50 bloque le retrait du dispositif de réception 5 (et par conséquent empêcherait son insertion).
- Le mécanisme de rétention 50 comprend un élément mobile 50.1 entre les deux positions précitées, qui s'étend dans le logement de réception 32 en position de rétention. En particulier, en position de rétention, l'élément mobile 50.1 coopère avec la butée de rétention 9.6 pour empêcher un mouvement de translation du dispositif de réception 5 visant à l'extraire de la machine à mélange 6 (en effet, la butée de rétention 9.6 vient se bloquer contre l'élément mobile 50.1 en cas de retrait). A cet égard, l'élément mobile 50.1 et la butée de rétention 9.6 sont prévus pour être situés à proximité en position de rétention, préférablement à moins de 2mm, lorsque le dispositif de réception 5 est mis en place dans la machine à mélange.
- Dans un mode de réalisation illustré sur les
figures 10A, 10B ,10C , l'élément mobile 50.1 est une roue, dite roue de rétention, mobile autour d'un axe de rotation de roue 50.2. La roue 50.1 présente au moins deux rayons différents, le rayon le plus faible étant configuré pour ne pas s'étendre dans le logement de réception 32 en position d'insertion et le rayon le plus grand étant configuré pour s'étendre dans le logement de réception 32 en position de rétention, afin de venir au contact, en cas de retrait, contre la butée de rétention 9.6. - La roue 50.1 est préférablement circulaire avec une portion méplate, la portion méplate permettant la position d'insertion.
- La roue 50.1 est montée sur un arbre qui s'étend selon l'axe de rotation de roue 50.2. Cet arbre comprend un pignon 51 ou une poulie, relié à au moins un autre pignon ou une autre poulie 51.1.
- Alternativement, l'élément mobile 50.1 est mobile en translation, par exemple par un système de pignon-crémaillère à l'aide du pignon 51.
- Le mécanisme d'accouplement 52 a pour fonction d'établir la connexion étanche entre les première et deuxième capsules 3, 4 et d'assurer que ces dernières restent bien emboitées via leur embout de connexion 3.4, 4.4 en appuyant sur le bouton d'accouplement 9.8 de la deuxième coque 9 de protection.
- Le mécanisme d'accouplement 52 est monté mobile par rapport au support 31 entre une position d'insertion et une position d'accouplement. Dans la position d'insertion, le mécanisme d'accouplement 52 permet l'insertion et le retrait du dispositif de réception 5. Dans la position d'accouplement, le mécanisme d'accouplement 52 verrouille les première et deuxième capsules 3, 4.
- Le mécanisme d'accouplement 52 comprend un élément d'accouplement 52.1 mobile entre les deux positions précitées, qui s'étend dans le logement de réception 32 en position d'accouplement. En particulier, en position d'accouplement, l'élément d'accouplement 52.1 coopère avec le bouton d'accouplement 9.8 qui se déplace à l'intérieur du deuxième emplacement de réception 14. A cet égard, l'élément d'accouplement 52.1 et le bouton d'accouplement 9.8 sont situés en regard, lorsque le dispositif de réception 5 est mis en place dans la machine à mélange 6.
- Dans un mode de réalisation illustré sur les
figures 10A, 10B ,10C , l'élément d'accouplement 52.1 est une roue, dite roue d'accouplement, mobile autour d'un axe de rotation de roue 52.2, qui est préférablement confondu avec l'axe de rotation de roue 50.2. La roue 52.1 présente au moins deux rayons différents, le rayon le plus faible étant configuré pour ne pas s'étendre dans le logement de réception 32 en position d'insertion et le rayon le plus grand étant configuré pour s'étendre dans le logement de réception 32 en position d'accouplement, afin de venir au contact du bouton d'accouplement 9.8, et de le presser. - La roue 52.1 est préférablement de forme ovale dans le plan.
- La roue 52.1 est montée sur un arbre qui s'étend selon l'axe de rotation de roue 52.2. Cet arbre comprend un pignon ou une poulie, relié à au moins un autre pignon ou une autre poulie 51.1. L'arbre et le pignon sont préférablement les mêmes que l'arbre et le pignon 51. On obtient ainsi un premier sous-ensemble solidaire en rotation.
- Alternativement, l'élément d'accouplement 52.1 est mobile en translation, par exemple par un système de pignon-crémaillère à l'aide du pignon 51.
- Le mécanisme d'accouplement 52 est distinct du système d'actionnement 35. Cela se traduit par une position dans la machine à mélange 6 différente (par exemple à des hauteurs différentes). De manière similaire le dispositif de réception 5 comprend bien des points d'appui 8.3, 9.3 distincts du bouton d'accouplement 9.8.
- Le mécanisme de serrage 54 a pour fonction de bloquer le passage de sortie 3.5 de la première capsule 3 lorsque le procédé de mélange est en cours. En effet, les pressions à l'intérieur des première ou deuxième capsules 3, 4 pourraient provoquer une sortie indésirée de la crème. Dans ce cas, de la crème se répandrait dans la machine à mélange 6, ce qui est à proscrire. Il est illustré sur les
figures 11A, 11B ,11C . - Le mécanisme de serrage 54 est mobile par rapport au support 31 entre une position d'insertion et une position de serrage. Dans la position d'insertion, le mécanisme de serrage 54 permet l'insertion et le retrait du dispositif de réception 5 portant la première capsule 3. Dans la position de serrage, le mécanisme de serrage 54 pince le passage de sortie 3.5.
- Le mécanisme de serrage 54 comprend une roue de serrage 54.1, dite roue de serrage, qui est mobile en rotation autour d'un axe de roue de serrage 54.2.
- La machine à mélange 6 comprend en outre une paroi de guidage 54.3, fixe (solidaire du support 31, voire venue de matière avec celui-ci), contre laquelle la roue de serrage 54.1 roule ou glisse, et une paroi de serrage contre laquelle elle est serrée en position de serrage. La paroi de serrage est avantageusement une portion de la paroi de guidage 54.3. On distingue plusieurs variantes : une variante dans laquelle la roue de serrage 54.1 se rapproche de la paroi de guidage 54.3 en direction de la position de serrage, une variante dans laquelle la distance est constante ou variante dans laquelle la paroi de serrage présente une concavité particulière, pour piéger la roue de serrage 54.1 (cela est possible grâce à une roue de serrage 54.1 mobile en translation - voir ci-dessous).
- Des dentures 54.11 présentes sur la roue de serrage 54.1 (en pratique la roue comprend une portion circulaire ou sensiblement circulaire qui vient pincer la première capsule 3 et une portion dentée, préférablement sous la portion circulaire) peuvent coopérer dans des dentures 54.31 dans la paroi de guidage 54.3, de sorte que la roue de serrage 54.1 roule contre la paroi de guidage 54.3. De plus, grâce aux dentures 54.11, 54.31, la roue de serrage 54.1 a un mouvement de roulement sans glissement contre la paroi de guidage 54.3, ce qui permet d'éviter le glissement qui risquerait de mal pincer le passage de sortie 3.5. Enfin, grâce aux dentures 54.11, 54.31, la distance entre la roue de serrage 54.1 (denture exceptée, c'est-à-dire la distance moyenne) et la paroi de guidage 54.3 peut se réduire pour devenir quasiment nulle sous la première capsule 3 tout en gardant un mouvement de roulement contre la paroi de guidage 54.3. Pour autoriser cette cinématique, la roue de serrage 54.1 est montée, préférablement montée mobile en rotation, sur un bras 54.5, qui est lui-même mobile en rotation autour d'un axe de rotation de bras 54.51.
- Le bras 54.5 est solidaire d'un pignon (ou d'une poulie), ou d'une portion de pignon 54.52, qui est lui-même relié par divers pignon ou poulie au pignon commun 40.1. Par conséquent, le bras 54.5 est entrainé en rotation par le même moteur auxiliaire 40.
- Afin d'assurer un pincement en position de serrage, y compris lorsque le moteur auxiliaire 40 n'est plus sous tension, la roue de serrage 54.1 est montée mobile en translation radialement le long du bras 54.5. Des moyens de rappel 54.4 disposés entre la roue de serrage 54.1 et le bras 54.5 tendent à écarter la roue de serrage 54.1 de l'axe de rotation de bras 54.51 et donc à plaquer la roue de serrage 54.1 contre la paroi de guidage 54.3. Plus précisément, un support intermédiaire, qui porte l'axe de rotation 54.2 de la roue de serrage 54.1 est prévu. C'est lui qui est mobile en translation par rapport à l'arbre 54.5. Une liaison glissière avec un pion 54.42 dans le support intermédiaire qui glisse dans une rainure 54.53 de l'arbre 54.5 permet de guider la translation et aussi, avantageusement, de limiter le mouvement de translation.
- Les moyens de rappel 54.4 fonctionnent donc en compression, dans la mesure où par défaut ils ne sont pas comprimés (ou peu). Un ressort hélicoïdal, un ressort à lame, ou autres types de ressorts peuvent convenir.
- Du fait des moyens de rappel 54.4, la roue de serrage 54.1 peut rester plaquée contre la paroi de guidage 54.3 quand bien même la distance entre la paroi de guidage 54.3 et l'axe de rotation de bras 54.51 est variable (elle peut aller en diminuant en direction de la zone où se trouve le passage de sortie 3.5).
- De préférence, le mécanisme de rétention 50, le mécanisme d'accouplement 52 et le mécanisme de serrage 54 sont entrainés de façon concomitante, par un entrainement commun, comme décrit selon l'exemple de réalisation ci-dessous. Le mécanisme de rétention 50 est entrainé par un pignon 51, relié au moins à un autre pignon 51.1 (
figures 10A , 10B). - Le mécanisme d'accouplement 52 est entrainé par un pignon, relié au moins à un autre pignon, qui sont préférablement le pignon 51 et l'autre pignon 51.1 (
figures 10A , 10B). - Le mécanisme de serrage 54 est entrainé par une portion de pignon 54.52.
- Différentes chaines cinématiques peuvent être prévues mais un pignon commun 40.1 est préférablement prévu, qui entraine ensuite l'autre pignon 51.1 et la portion de pignon 54.52.
- Comme illustré sur les
figures 11A, 11B ,11C , le pignon commun 40.1 est situé sur l'arbre de sortie du moteur auxiliaire 40. Il engrène directement le pignon 51.1 qui est monté sur un arbre comprenant un autre pignon 51.2. Ce pignon 51.2 engrène quant à lui la portion de pignon 54.52. On a ainsi une chaine cinématique très simple, avec un minimum de pignons, et donc un minimum de pertes par frottement, un minimum de risques de casse, et avec peu de jeu. - Grâce à ce pignon commun 40.1, situé sur l'arbre de sortie du moteur auxiliaire 40, au moins deux parmi les trois mécanismes 50, 52, 54 précités, sont simultanément en position d'insertion ou en position respectivement de rétention, d'accouplement, de serrage. Le même moteur auxiliaire 40 entraine donc les trois, ce qui constitue une simplification majeure de la machine à mélange 6 et de sa logique de fonctionnement.
- La machine à mélange 6 comprend avantageusement un écran 60 et/ou un haut-parleur, qui permettent d'échanger des informations avec l'utilisateur (
figures 1A ,1B ,7 ). - L'écran 60 est de préférence tactile, pour éviter de prévoir des boutons physiques. Il permet à l'utilisateur d'indiquer le lancement du cycle et le moment du retrait.
- L'écran 60 peut aussi afficher la fin du cycle, en étant par exemple accompagné d'un avertissement sonore.
- Selon un mode de réalisation de l'invention, la machine à mélange 6 comporte également une source d'alimentation électrique (non représentée sur les figures) configurée pour alimenter électriquement la machine à mélange 6, et notamment le moteur d'entraînement 39 et le moteur auxiliaire 40. La source d'alimentation électrique comporte avantageusement, voire exclusivement au moins une batterie rechargeable 44 (
figure 7B ). Dans l'exemple illustré, la batterie rechargeable 44 est avantageusement constituée par une batterie lithium ion à deux cellules fournissant une tension nominale de sortie de 7,4 V. - Comme illustré sur la
figure 12 , la machine à mélange 6 comporte en outre une unité de contrôle 45, comprenant par exemple un contrôleur tel qu'un microcontrôleur ou processeur 45.1 tel qu'un microprocesseur, configuré pour contrôler le fonctionnement de l'appareil de fabrication 2, et plus particulièrement du moteur d'entraînement 39, du moteur auxiliaire 40, de l'élément de chauffage 46, du capteur de température et l'écran 60 (pour ce dernier on privilégie un processeur), ainsi que tout dispositif sonore ou visuel. L'unité de contrôle 45 comprend avantageusement une mémoire 45.2, de type non-volatile, qui stocke les lignes d'instructions sous forme de programme à exécuter par le contrôleur ou le processeur 45.1, notamment pour mettre en œuvre certaines étapes décrites dans le procédé ci-dessous. - Dans une variante, le dispositif de réception 5 est intégré à la machine à mélange 6. Par conséquent, il suffit d'insérer les première ou deuxième capsule 3, 4 dans les premier ou deuxième emplacement de réception 13, 14. On définit tout de même un logement de réception 32, qui correspond au volume occupé par le dispositif de réception 5.
- De plus, dans cette variante, les faces d'actionnement 8.1, 9.1 peuvent ne pas être présentes : les organes d'actionnement 37, 38 appuient dans ce cas directement sur les première ou deuxième capsules 3, 4.
- Au moins un procédé de fabrication d'une composition, telle qu'un produit cosmétique, à l'aide de l'appareil de fabrication 2 va maintenant être décrit. Ce procédé de fabrication se décompose en plusieurs sous-procédés (appelés « procédés » pour des raisons de clarté), dont une ou plusieurs variantes seront décrites. On distingue en particulier un procédé préliminaire Ep, un procédé d'initialisation Ei, un procédé de mélange Em, puis un procédé de retrait Er.
- En particulier, ces procédés (ou leurs variantes) sont avantageusement mis en œuvre à l'aide des différents modes de réalisation de l'appareil de fabrication 2 décrit précédemment. De préférence, la plupart des étapes des procédés Ei, Em et Er sont stockées dans la mémoire 45.2, de type non-volatile, sous forme d'instructions en lignes de codes aptes à être exécutées par le processeur 45.1.
- Un procédé préliminaire Ep comprend une étape Ep1 préliminaire à toute utilisation de l'appareil de fabrication 2 qui consiste soit à le brancher sur secteur soit à recharger la batterie 44. De plus, cette étape préliminaire Ep1 peut être précédée ou suivie d'une étape Ep2 de mise en position de l'appareil de fabrication 2 sur un support plat, avec éventuellement une étape de mise sous tension.
- Ensuite, un procédé d'initialisation Ei est mis en œuvre. Dans une étape Ei1 (« étape de réception »), le processeur de la machine de fabrication 2 reçoit une consigne de départ. Cette consigne de départ est typiquement générée par une action d'un utilisateur (contact avec l'écran tactile 60, bouton pressoir, interrupteur, etc.).
- Suite à cette étape Ei1, dans une étape Ei2 (« étape de vérification »), le procédé s'assure que le système d'actionnement 35 est en position neutre, permettant l'insertion du dispositif de réception 5 ou l'insertion des première et deuxième capsules 3, 4. Typiquement, il faut s'assurer que le logement de réception 32 (pour l'insertion du dispositif de réception 5) ou les premier ou deuxième emplacement de réception 13, 14 (pour l'insertion des première ou deuxième capsules 3, 4 lorsqu'il n'y a pas de dispositif de réception 5) ne sont pas obstrués par le système d'actionnement 35. Pendant cette étape Ei2, il convient également de vérifier que le mécanisme de serrage 54, le mécanisme d'accouplement 52, et le mécanisme de rétention 50 sont désactivés, c'est-à-dire dans leur position d'insertion respective.
- Suite à cette étape Ei2, on peut insérer manuellement le dispositif de réception 5 contenant les première ou deuxième capsules 3, 4, voire insérer directement les première ou deuxième capsules 3, 4, dans le logement de réception 32.
- Enfin, dans une étape suivante Ei3 (« étape de fermeture »), au moins un parmi : le mécanisme de serrage 54, le mécanisme d'accouplement 52, le mécanisme de rétention 50 sont activés, c'est-à-dire qu'ils se déplacent. Cette étape Ei3 consiste par exemple en une consigne par le processeur à destination du moteur auxiliaire 40 pour le déclencher, afin qu'il entraine les trois mécanismes précités dans le cas où ils sont tous reliés au pignon (ou poulie) commun 40.1. Le moteur auxiliaire 40 passe d'une première position à une deuxième position, afin que le mécanisme de serrage 52, le mécanisme d'accouplement 54 et le mécanisme de rétention 50 passe de leur position d'insertion respective à leurs positions respectives de serrage, d'accouplement et de rétention. Préférablement, le moteur auxiliaire 40 maintient la deuxième position à la fin de l'étape Ei3, quand bien même il n'est plus alimenté.
- Les étapes Ei1, Ei2 et Ei3 sont exécutées notamment par le processeur 45.1.
- A l'issue de ce procédé d'initialisation Ei, la machine à mélange 6 est prête à commencer le travail sur les première et deuxième capsules 3, 4 : c'est l'objet des procédés de mélange Em et de retrait Er.
- Le procédé de mélange Em comprend une première étape Em1 de phase de préparation (« étape primaire de mise en mouvement du système d'actionnement »), au cours de laquelle on casse la soudure de liaison de la capsule positionnée le plus loin de l'élément chauffant 46 (la deuxième capsule 4 sur les figures), et on comprime cette capsule pour que son contenu soit envoyé en partie vers la capsule la plus proche de l'élément chauffant 46. Selon l'exemple de réalisation présenté, le deuxième organe d'actionnement 38 est mis en mouvement pour casser la soudure de liaison dans la deuxième capsule 4 (qui comprend par exemple la formulation de phase grasse). De la sorte, une partie du contenu de la deuxième capsule 4 est envoyé du côté de la première capsule 3, en particulier dans le passage de liaison 3.3 (car la soudure de liaison de la première capsule 3 n'est pas encore rompue). Le deuxième organe d'actionnement 38 est préférablement mis en mouvement selon sa course d'actionnement C38. Pour des raisons de simplification de conception, il n'y a pas nécessairement un capteur de course partielle pour le deuxième organe d'actionnement 38.
- Dans une étape Em2 de phase de préparation (« étape secondaire de mise en mouvement du système d'actionnement » ou « étape de précontrainte »), le premier organe d'actionnement 37 est mis en mouvement selon une course partielle strictement inférieure à sa course d'actionnement C37 et garde sa position, afin d'exercer une précontrainte sur la première capsule 3 (qui comprend par exemple la formulation de phase aqueuse) de manière à ce que la face plane 3.7 soit pressée contre la plaque de diffusion 46.2. Cette précontrainte permet de favoriser l'échange thermique entre la plaque de diffusion 46.2 et la première capsule 3 lors d'une étape Em3 (« étape de chauffe ») ultérieure. Il faut noter que cette mise en pression de la première capsule 3 contre la plaque de diffusion 46.2, grâce à la mise en mouvement du premier organe d'actionnement 37 sur une course partielle, s'effectue sans provoquer la rupture de la soudure de liaison dans la première capsule 3 (ce qui provoquerait l'envoi de la formulation de la première capsule 3 vers la deuxième capsule 4).
- Dans l'étape Em3 de phase de préparation (« étape de chauffe »), l'élément chauffant 46 est activé pour générer de la chaleur à destination de la première capsule 3. Comme l'élément chauffant 46 est positionné du côté la face plane 3.7 de la première capsule 3, et que l'étape de précontrainte a permis un bon contact thermique entre la plaque de diffusion 46.2 et la première capsule 3, la chaleur fournie par l'élément chauffant 46 est bien répartie sur le contenu de la première capsule 3. L'étape Em3 est donc activée en l'absence de tout mouvement des organes d'actionnement 37, 38.
- Durant l'étape Em3 de phase de préparation, la température de l'élément chauffant 46 atteint une température cible Tc comprise entre 80°C et 90°C. L'objectif de cette température cible Tc est que le contenu de la première capsule 3 atteigne une température cible Tc' également comprise entre 80°C et 90°C et préférentiellement de l'ordre de 85°C. En effet, on a constaté que la température du contenu de la première capsule 3 lors de cette étape de chauffe Em3 correspondait sensiblement à la température cible Tc de l'élément chauffant 46, avec cependant un léger décalage temporel.
- Ensuite, dans une étape Em3' de phase de malaxage (« étape de mélange »), l'élément chauffant 46 est désactivé puis le premier organe d'actionnement 37 est mis en mouvement selon sa course nominale pour casser la soudure de liaison dans la première capsule 3. La coupure de l'alimentation électrique de l'élément chauffant 46 préalablement à l'activation du premier organe d'actionnement 37 permet d'avoir l'intégralité de la puissance fournie par la source d'alimentation électrique disponible pour alimenter le moteur d'entrainement 39. Une telle caractéristique est particulièrement avantageuse dans le cas où la machine à mélange 6 est alimentée par un transformateur d'alimentation ou une batterie 44 de faible puissance. En effet, elle permet d'éviter que la puissance fournie au moteur d'entrainement 39 soit insuffisante pour permettre la rupture de la soudure de liaison de la première capsule 3 (qui conduirait alors à un blocage de l'appareil), cette étape de rupture de la soudure de liaison demandant un couple moteur important. Lorsque le premier organe d'actionnement 37 atteint sa fin de course d'actionnement C37, le contenu de la première capsule 3 est envoyé dans deuxième capsule 4 et les deux formulations peuvent alors circuler librement d'une première ou deuxième capsule 3, 4 à l'autre deuxième ou première capsule 4, 3 en passant par les parties de connexion 3.2, 4.2 à chaque mouvement d'aller-retour du système d'actionnement 35, les soudures de liaison présentes à l'origine dans chacune des première et deuxième capsules 3, 4 ayant été rompues.
- Par la suite, les étapes Em4, Em5, Em6 sont des étapes successives de malaxage, avec ou sans chauffe (on parle de phase de malaxage).
- L'étape Em4 de phase de malaxage (« étape de malaxage sans chauffe ») consiste à mettre en mouvement les organes d'actionnement 37, 38 dans un va-et-vient sans activation de l'élément chauffant 46, c'est-à-dire sans chauffe. Durant cette étape, les première et deuxième capsules 3, 4 sont déformées au moins une fois chacune. Selon un mode de réalisation, l'étape Em4 dure au moins 1,4 s et préférablement entre 2s et 4s. Une telle étape de malaxage sans chauffe permet de lancer le moteur d'entrainement 39 à une vitesse constante en bénéficiant de toute la puissance de la source d'alimentation électrique.
- Les étapes Em1, Em2 et Em3, Em3', Em4 alternent mise en mouvement du système d'actionnement 35 et chauffage avec l'élément chauffant 46. Cela se traduit concrètement par une alimentation électrique dédiée soit au système d'actionnement 35 soit à l'élément chauffant 46. Cette alternance exclusive permet de préserver la batterie 44 en répartissant les moments de forte puissance. En effet, l'enclenchement de la mise en mouvement engendre un couple résistant important ce qui impose un couple moteur important et la montée en température nécessite également une puissance importante : la batterie 44 est alors fortement sollicitée. Cette solution d'alternance permet aussi de diminuer la taille de composants, ce qui est une contrainte de conception lors de la création d'une machine à mélange, portative et sur batterie.
- En revanche, une fois la température proche de la température cible Tc' et une fois le système d'actionnement 35 déjà en mouvement, les sollicitations de la batterie 44 sont réduites et autorisent une alimentation de l'élément chauffant 46 et du système d'actionnement 35 en parallèle : c'est l'objet de l'étape Em5.
- Durant l'étape Em5 de phase de malaxage (« étape de malaxage avec chauffe »), le système d'actionnement 35 reste activé et l'élément chauffant 46 est réactivé afin de maintenir le mélange des formulations à une température, qui est préférablement la température cible Tc'. Par conséquent, l'élément chauffant est maintenu à la température cible Tc. Cette étape Em5 dure par exemple entre 5s et 30s, préférablement entre 7s et 15s. Bien que la batterie 44 soit moins sollicitée que pour un enclenchement ou une montée en température, elle peut avoir tendance à se décharger rapidement dans cette phase qui est donc limitée en durée.
- Néanmoins, cette étape Em5 est suffisamment longue pour que les première et deuxième capsules 3, 4 soient déformées plusieurs fois chacune et que l'émulsion obtenue par le mélange des formulations soit satisfaisante.
- Entre l'étape Em4 et Em5, le système d'actionnement 35 n'a pas été interrompu.
- Par la suite, l'étape Em6 de phase de malaxage (« étape de refroidissement avec malaxage ») est mise en œuvre. Alternativement, cette étape se fait sans malaxage mais il est préférable de maintenir activé le système d'actionnement 35 pour améliorer ou tenir l'homogénéisation des formulations. Durant l'étape Em6, la température de la crème diminue jusqu'à une température de retrait Tr' comprise entre 35°C et 48°C, préférablement 38°C et 42°C. Dans le cas du mode de réalisation présenté, la température de retrait Tr' de la crème correspond une température de retrait Tr de l'élément chauffant 46 comprise entre 55°C et 60°C. Cet écart de température entre le contenu des première et deuxième capsules 3, 4 et la température de l'élément chauffant 46 lors de l'étape de refroidissement s'explique notamment par le fait que, lors du malaxage, la composition n'est présente qu'une partie du temps dans la première capsule 3 et donc en regard de la plaque de diffusion 46.2 au niveau de laquelle s'effectue la mesure de température.
- La technique la plus simple pour refroidir est d'arrêter l'alimentation de l'élément chauffant 46 et de laisser la crème se refroidir avec l'air à température ambiante. Par conséquence la durée de l'étape Em6 dépend effectivement de la température ambiante. A cet égard, un capteur de température est avantageusement positionné dans la machine à mélange 6, et plus précisément dans le dispositif de réception 5. Afin de limiter le nombre de capteur de température, il s'agit du même capteur qui mesure la température de l'élément chauffant 46.
- Comme dans le mode de réalisation illustré, le capteur de température mesure la température de l'élément chauffant 46, on réutilise le même capteur : cela signifie que la fin de l'étape Em6 est déterminée par la température mesurée par ledit capteur, c'est-à-dire la température de retrait Tr' comprise entre 55°C et 60°C.
- Une fois la température de retrait atteinte, le système d'actionnement 35 est arrêté.
- L'étape de refroidissement Em6 dure en général au moins 20s et préférablement 40s.
- Dans une variante de réalisation, l'étape Em6 pourrait également avantageusement comprendre une durée minimum de malaxage, par exemple de l'ordre de 40 s, permettant de garantir une bonne émulsion, puis une durée supplémentaire de malaxage qui n'intervient que lorsque la température de retrait Tr' n'est pas encore atteinte. En d'autres termes, on malaxe quand même pendant une certaine durée même si la température est inférieure à la température de retrait Tr'.
- Il est à noter que la machine à mélange 6 pourrait selon un mode de réalisation non illustré comprendre un système de refroidissement pour refroidir de façon active la crème et accélérer le processus. Il pourrait par exemple être prévu un système de refroidissement doté d'un ventilateur de petite taille en complément ou non d'un élément de refroidissement, le ventilateur forçant une circulation d'air dans la machine à mélange 6, et donc un refroidissement par convection forcée.
- Une fois le procédé de mélange Em terminé, le procédé de retrait Er peut être enclenché. Ce procédé de retrait Er va à présent être décrit.
- Comme les étapes précédentes prennent un certain temps (plus d'une minute en général), il est probable que l'utilisateur ne reste pas à côté de la machine de mélange 6 mais qu'il vaque à ses occupations habituelles (petit-déjeuner, radio, télévision, beurrage de tartine, habillage, repassage, etc.). Ainsi, il est important que la machine de mélange 6 puisse tenir la crème dans un état prêt à l'emploi pendant une durée déterminée.
- A cette fin, dans une étape Er1 (« étape de transfert pour stockage »), le système d'actionnement 35 est activé une fois pour transférer la crème dans la capsule qui se trouve du côté de l'élément chauffant 46 (c'est-à-dire la première capsule 3 ici). Cette étape est facultative si jamais l'étape Em6 s'est déjà arrêtée dans la bonne configuration.
- Dans une étape Er2 (« étape de maintien en précontrainte »), le système d'actionnement 35 est remis en position précontrainte, où le premier organe d'actionnement 37 exerce une précontrainte sur la première capsule 3 pour la plaquer contre plaque de diffusion 46.2, puis, dans une étape Er3 (« étape de maintien à température »), l'élément chauffant 46 est réactivé pour tenir la crème à la température de retrait Tr'. L'étape Er2 de maintien en précontrainte permet une meilleure conduction de la chaleur, à l'instar de l'étape Em2. De préférence, un malaxage ou mouvement du système d'actionnement 35 est mis en œuvre périodiquement lors de l'étape Er3 pour garantir une bonne émulsion, cette dernière pouvant en partie être détériorée par la présence de points chaud sur la plaque de diffusion 46.2.
- Dans une variante de réalisation, le procédé de retrait pourra comporter, à la place de l'étape étape Er2, une étape Er2' (« étape de maintien en position neutre ») dans laquelle le système d'actionnement 35 est activé pour être placé en position neutre, c'est-à-dire sans contraindre les première ou deuxième capsules 3, 4, et en particulier sans contraindre la première capsule 3 contre l'élément chauffant 46. Etonnement, une telle variante permet de conserver une meilleure émulsion et d'éviter d'avoir recours à un malaxage périodique durant la phase de maintien au chaud.
- L'étape Er3 est mise en œuvre pendant une durée d'attente prédéterminée. Cette durée est inférieure à 15min, pour ne pas alimenter trop longtemps l'élément chauffant 46, mais supérieure à 1min, pour permettre une souplesse dans la gestion du temps le matin à l'utilisateur, et préférablement de l'ordre de 5min. En d'autres termes, cela signifie que l'utilisateur a entre 1min et 15min, et de préférence de l'ordre de 5min (en fonction des paramétrages usines ou des paramétrages de l'utilisateur) après la fin du mouvement du système d'actionnement 35 pour venir récupérer la crème à la bonne température.
- Dès lors que l'utilisateur est prêt à utiliser la crème, il touche l'écran tactile ou appuie sur un bouton, ce qui déclenche une étape Er4 (« étape de réception d'instructions de retrait »), durant laquelle la machine de mélange 6 reçoit une consigne de retrait.
- Ensuite, dans une étape Er5 (« étape de mise en position neutre »), le système d'actionnement 35 est activé pour être mis en position neutre.
- Dans le cas où le système d'actionnement 35 était en précontrainte auparavant au niveau du premier organe d'actionnement 37 ce dernier doit terminer son mouvement, ce qui déplace la formulation dans la deuxième capsule 4, puis le système d'actionnement 35 s'arrête en position neutre qui correspond à une position adaptée pour l'extraction du dispositif de réception 5. Cette position correspond également à une position de départ adaptée à la réalisation d'un prochain cycle fabrication mettant en œuvre le procédé précédemment décrit. En effet, le deuxième organe d'actionnement 38 se trouve alors prêt à venir comprimer la deuxième capsule 4 lors de l'étape Em1 dès la mise en marche du moteur d'entrainement 39.
- Dans le cas de la variante de réalisation où le système d'actionnement 35 a été mis en position neutre lors de l'étape Er2' pour le maintien en température de l'étape Er3, il peut être nécessaire que le système d'actionnement 35 ait à effectuer un aller-retour pour se positionner dans la position neutre adaptée à la réalisation d'un prochain cycle fabrication mettant en œuvre le procédé précédemment décrit, c'est-à-dire avec le deuxième organe d'actionnement 38 prêt à venir comprimer la deuxième capsule 4 lors de l'étape Em1.
- Lors de cet aller-retour du système d'actionnement 35 la crème présente dans la première capsule 3 est envoyée partiellement dans la deuxième capsule.
- Enfin dans une dernière étape Er6 (« étape de déverrouillage »), chaque mécanisme activé à l'étape Ei3 est placé en position d'insertion. De la même façon, cette étape Er6 implique une activation du moteur auxiliaire 40.
- Par la suite, l'utilisateur attrape le dispositif de réception 5 et le retire de son logement de réception 32. Puis il appuie sur les faces d'actionnement 8.1, 9.1 pour faire pivoter les palettes afin de chasser la crème présente dans les première et deuxième capsule 3, 4 par le passage de sortie 3.5 de la première capsule 3. Enfin, il suffit de retirer les première ou deuxième capsules 3, 4 du dispositif de réception 5 pour que ce dernier soit de nouveau prêt à l'usage. En effet, aucune partie de la machine de mélange 6 (appareil de fabrication 2 ou dispositif de réception) n'a été en contact avec les formulations.
- Les différentes étapes de mise en œuvre du procédé décrites ci-dessus, qui peuvent par exemple être mises en œuvre successivement, sont donc les suivantes :
- Ei1 : étape de réception d'une consigne de départ (mise en œuvre par la machine à mélange et plus précisément par le processeur),
- Ei2 : étape de positionnement du système d'actionnement (mise en œuvre par la machine à mélange et plus précisément par le processeur qui pilote le moteur d'entrainement),
- Ei3 : étape de fermeture, préférablement en parallèle, des mécanismes de serrage, de rétention et d'accouplement (mise en œuvre par la machine à mélange et plus précisément par le processeur qui pilote le moteur auxiliaire),
- Em1 : étape primaire de mise en mouvement du système d'actionnement pour rompre la soudure de liaison d'une des capsules (mise en œuvre par la machine à mélange et plus précisément par le processeur qui pilote le moteur d'entrainement),
- Em2 : étape secondaire de mise en mouvement du système d'actionnement pour exercer une précontrainte sur l'autre capsule (mise en œuvre par la machine à mélange et plus précisément par le processeur qui pilote le moteur d'entrainement),
- Em3 : étape de chauffe de la capsule précontrainte, (mise en œuvre par la machine à mélange et plus précisément par le processeur qui pilote l'élément chauffant),
- Em3' : étape de mélange par mise en mouvement du système d'actionnement pour rompre la soudure de liaison de l'autre capsule et permettre une libre circulation des formulations d'une capsule à l'autre (mise en œuvre par la machine à mélange et plus précisément par le processeur qui pilote le moteur d'entrainement),
- Em4 : étape de malaxage sans chauffe pour lancer le moteur à vitesse constante (mise en œuvre par la machine à mélange et plus précisément par le processeur qui pilote le moteur d'entrainement),
- Em5 : étape de malaxage avec chauffe pour réaliser l'émulsion (mise en œuvre par la machine à mélange et plus précisément par le processeur qui pilote le moteur d'entrainement et l'élément chauffant),
- Em6 : étape de refroidissement avec malaxage et sans chauffe (refroidissement) jusqu'à la température de retrait (mise en œuvre par la machine à mélange dont le processeur qui pilote le moteur d'entrainement),
- Er1 : étape facultative de transfert pour stockage avec mise en mouvement du système d'actionnement (mise en œuvre par la machine à mélange et plus précisément par le processeur qui pilote le moteur d'entrainement),
- Er2 : étape de mise en position précontrainte du système d'actionnement (mise en œuvre par la machine à mélange et plus précisément par le processeur),
- Er2' : étape (alternative à l'étape Er2) mise en position neutre du système d'actionnement (mise en œuvre par la machine à mélange et plus précisément par le processeur qui pilote le moteur d'entrainement)
- Er3 : étape de maintien à température (mise en œuvre par la machine à mélange et plus précisément par le processeur),
- Er4 : étape de réception d'une consigne de retrait (mise en œuvre par la machine à mélange et plus précisément par le processeur),
- Er5 : étape de mise en position neutre du système d'actionnement (mise en œuvre par la machine à mélange et plus précisément par le processeur qui pilote le moteur d'entrainement)
- Er6 : étape de déverrouillage (mise en œuvre par la machine à mélange et plus précisément par le processeur qui pilote le moteur auxiliaire).
Claims (15)
- Appareil de fabrication (2) d'un produit, notamment cosmétique, comprenant une machine à mélange (6) comportant- un dispositif de réception (5) amovible comprenant- un premier emplacement de réception (13), configuré pour recevoir une première capsule (3) contenant une première formulation, et- un deuxième emplacement de réception (14), configuré pour recevoir une deuxième capsule (4) contenant une deuxième formulation, les deux capsules (3, 4) pouvant être étant couplées fluidiquement,- une première face d'actionnement (8.1) du dispositif de réception (5), autorisant un transfert d'un effort de pression sur la première capsule (3),- une deuxième face d'actionnement (9.1) du dispositif de réception (5), opposée à la première, autorisant un transfert d'un effort de pression sur la deuxième capsule (4),- un bouton d'accouplement (9.8), positionné sur une des faces d'actionnement (8.1, 9.1), le bouton d'accouplement (9.8) étant mobile ou souple, et configuré pour transmettre un effort à l'une parmi la première ou la deuxième capsule.- un support (31) définissant un logement de réception (32), apte à recevoir le dispositif de réception (5),- un système d'actionnement (35), mobile à l'intérieur du logement de réception (32) pour exercer un effort de pression sur le dispositif de réception (5) et/ou sur la première et/ou la deuxième capsule (3, 4),- un mécanisme d'accouplement (52), mobile par rapport au support (31) et configuré pour* dans une position d'insertion, ne pas interférer avec l'insertion et le retrait du dispositif de réception (5) dans le logement de réception (32),* dans une position d'accouplement, exercer un effort sur le bouton d'accouplement (9.8) pour transmettre un effort à l'une parmi la première ou la deuxième capsule, afin d'établir et/ou maintenir le couplage des deux capsules (3, 4).
- Appareil de fabrication (2) selon la revendication 1, comprenant en outre :- un mécanisme de rétention (50), mobile par rapport au support (31) et configuré pour* dans une position d'insertion, autoriser l'insertion et le retrait du dispositif de réception (5), et* dans une position de blocage, bloquer le retrait du dispositif de réception (5),
et/ou- un mécanisme de serrage (54), mobile par rapport au support (31) et configuré pour* dans une position d'insertion, ne pas interférer avec l'insertion et le retrait du dispositif de réception (5) comportant des capsules (3, 4) dans le logement de réception (32),* dans une position de serrage, pour pincer une portion d'une capsule (3.6). - Appareil de fabrication (2) selon la revendication 1 ou 2, comprenant un moteur auxiliaire (40), préférablement électrique, configuré pour déplacer le mécanisme d'accouplement (52) entre ses deux positions.
- Appareil de fabrication (2) selon la revendication 2 ou la revendication 3 en combinaison avec la revendication 2, dans lequel au moins deux parmi : le mécanisme d'accouplement (52), le mécanisme de rétention (50), le mécanisme de serrage (54) sont cinématiquement reliés par un engrenage ou une poulie commune (40.1, 51.1, 51).
- Appareil de fabrication (2) selon les revendications 3 et 4, dans lequel le moteur auxiliaire (40) est agencé pour entrainer en rotation ledit engrenage ou une poulie commune (40.1, 51.1, 51)
- Appareil de fabrication (2) selon l'une quelconque des revendications 3 à 5, dans lequel le moteur auxiliaire (40) est configuré pour être alimenté uniquement lorsque le mécanisme d'accouplement (52) doit être déplacé.
- Appareil de fabrication (2) selon l'une quelconque des revendications 1 à 6, dans lequel le mécanisme d'accouplement (52) comprend une roue d'accouplement (52.1), mobile en rotation autour d'un axe de roue d'accouplement (52.2).
- Appareil de fabrication (2) selon la revendication 7, dans lequel la roue d'accouplement (52.1) présente deux rayons différents, de sorte qu'en position d'insertion, la roue d'accouplement (52.1) ne s'étend pas dans le logement de réception (32) et qu'en position d'accouplement, la roue d'accouplement (52.1) s'étend dans le logement de réception (32) afin d'exercer un effort sur une face d'actionnement (8.1, 9.1) du dispositif de réception (5).
- Appareil de fabrication (2) selon l'une quelconque des revendications 2 à 8 en combinaison avec la revendication 2, dans lequel le mécanisme de rétention (50) comprend une roue de rétention (50.1) mobile en rotation autour d'un axe de roue de rétention (51.2).
- Appareil de fabrication (2) selon la revendication 9, dans lequel la roue de rétention (50.1) présente deux rayons différents, de sorte qu'en position d'insertion, la roue de rétention (50) ne s'étend pas dans le logement de réception (32) et qu'en position de blocage, la roue de rétention (50) s'étend dans le logement de réception (32) afin de faire butée contre le dispositif de réception (5).
- Appareil de fabrication (2) selon la revendication 9 ou 10 en combinaison avec la revendication 7, dans lequel l'axe de roue de rétention (50.2) et l'axe de roue d'accouplement (52.2) sont confondus.
- Appareil de fabrication (2) selon l'une quelconque des revendications 1 à 11, dans lequel le système d'actionnement (35) comprend :- un premier organe d'actionnement (37) positionné sur un côté du logement de réception (32), et mobile à l'intérieur de celui, afin de transmettre un effort de pression sur une première face d'actionnement (8.1) du dispositif de réception (5),- un deuxième organe d'actionnement (38), positionné sur un autre côté, préférablement opposé, du logement de réception (32), et mobile à l'intérieur de celui, afin de transmettre un effort de pression sur une deuxième face d'actionnement (9.1) du dispositif de réception (5).
- Appareil de fabrication (2) selon l'une quelconque des revendications 1 à 12, dans lequel le mécanisme d'accouplement (52) est mobile et est situé à un emplacement différent de celui du système d'actionnement (35), afin d'exercer un effort de pression sur le dispositif de réception (5) ailleurs que l'effort de pression du système d'actionnement (35).
- Appareil de fabrication (2) selon l'une quelconque des revendications 1 à 13, dans lequel le bouton d'accouplement (9.8) est adjacent à un point d'appui (9.3) sur la face d'actionnement (9.1), ledit point d'appui (9.3) étant configuré pour recevoir l'effort du système d'actionnement (35).
- Appareil de fabrication (2) selon l'une quelconque des revendications 1 à 14, dans lequel le bouton d'accouplement (9.8) est en regard du mécanisme d'accouplement (52), le mécanisme d'accouplement (52) étant configuré pour appuyer sur le bouton d'accouplement (9.8) lorsqu'il occupe la position d'accouplement.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR1874002A FR3090398B1 (fr) | 2018-12-21 | 2018-12-21 | Appareil de fabrication, machine à mélange et/ou dispositif de réception pour la fabrication d’une composition à partir d’un mélange de formulations |
| PCT/EP2019/086577 WO2020127906A1 (fr) | 2018-12-21 | 2019-12-20 | Appareil de fabrication pour la fabrication d'une composition a partir d'un melange de formulations |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3897936A1 EP3897936A1 (fr) | 2021-10-27 |
| EP3897936B1 true EP3897936B1 (fr) | 2022-11-30 |
Family
ID=67514692
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP19824335.4A Active EP3897936B1 (fr) | 2018-12-21 | 2019-12-20 | Appareil de fabrication pour la fabrication d'une composition a partir d'un mélange de formulations |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US20220053911A1 (fr) |
| EP (1) | EP3897936B1 (fr) |
| JP (1) | JP2022515727A (fr) |
| KR (1) | KR20210107671A (fr) |
| CN (1) | CN111346553A (fr) |
| ES (1) | ES2939050T3 (fr) |
| FR (1) | FR3090398B1 (fr) |
| WO (1) | WO2020127906A1 (fr) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR3090406B1 (fr) * | 2018-12-21 | 2020-12-04 | Seb Sa | Appareil de fabrication, machine à mélange et/ou dispositif de réception pour la fabrication d’une composition à partir d’un mélange de formulations |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE9017592U1 (fr) * | 1990-12-31 | 1991-05-23 | Schreiber, Hans, Dr.Med. Dr.Med.Dent., 6800 Mannheim, De | |
| AU2001286061A1 (en) * | 2000-09-11 | 2002-03-26 | Adrian James Gaunt | Applicator |
| FR3013036B1 (fr) * | 2013-11-14 | 2016-12-23 | Awel | Appareil de fermeture d'un sac a l'aide d'une tige s'engageant dans un clip et dispositif associe |
| FR3026622B1 (fr) | 2014-10-07 | 2016-12-30 | Laboratoires M&L | Systeme de fabrication d'un produit cosmetique par melange a partir de plusieurs unites de conditionnement a usage unique. |
-
2018
- 2018-12-21 FR FR1874002A patent/FR3090398B1/fr active Active
-
2019
- 2019-12-20 EP EP19824335.4A patent/EP3897936B1/fr active Active
- 2019-12-20 KR KR1020217018774A patent/KR20210107671A/ko not_active Application Discontinuation
- 2019-12-20 ES ES19824335T patent/ES2939050T3/es active Active
- 2019-12-20 US US17/415,100 patent/US20220053911A1/en active Pending
- 2019-12-20 WO PCT/EP2019/086577 patent/WO2020127906A1/fr unknown
- 2019-12-20 CN CN201911324391.1A patent/CN111346553A/zh active Pending
- 2019-12-20 JP JP2021535019A patent/JP2022515727A/ja active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| FR3090398B1 (fr) | 2021-06-25 |
| JP2022515727A (ja) | 2022-02-22 |
| WO2020127906A1 (fr) | 2020-06-25 |
| KR20210107671A (ko) | 2021-09-01 |
| ES2939050T3 (es) | 2023-04-18 |
| FR3090398A1 (fr) | 2020-06-26 |
| EP3897936A1 (fr) | 2021-10-27 |
| CN111346553A (zh) | 2020-06-30 |
| US20220053911A1 (en) | 2022-02-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3897938B1 (fr) | Machine a mélange pour la fabrication d'une composition a partir d'un mélange de formulations | |
| EP3897944B1 (fr) | Appareil de fabrication et machine à mélange pour la fabrication d'une composition à partir d'un mélange de formulations | |
| EP3897937B1 (fr) | Appareil de fabrication pour la fabrication d'une composition à partir d'un mélange de formulations | |
| EP3897936B1 (fr) | Appareil de fabrication pour la fabrication d'une composition a partir d'un mélange de formulations | |
| EP3897935B1 (fr) | Appareil de fabrication pour la fabrication d'une composition a partir d'un mélange de formulations | |
| EP3897943B1 (fr) | Appareil de fabrication pour la fabrication d'une composition a partir d'un mélange de formulations | |
| EP3897941B1 (fr) | Procédé et appareil de fabrication pour la fabrication d'une composition a partir d'un melange de formulations | |
| EP3897942B1 (fr) | Appareil de fabrication, machine a mélange et/ou dispositif de réception pour la fabrication d'une composition a partir d'un mélange de formulations | |
| EP3897948B1 (fr) | Appareil de fabrication et dispositif de réception pour la fabrication d'une composition a partir d'un mélange de formulations | |
| EP3897940B1 (fr) | Appareil de fabrication pour la fabrication d'une composition a partir d'un mélange de formulations | |
| EP3897939B1 (fr) | Appareil de fabrication pour la fabrication d'une composition a partir d'un mélange de formulations | |
| EP3897946B1 (fr) | Procédé et appareil de fabrication pour la fabrication d'une composition a partir d'un mélange de formulations | |
| EP3897945B1 (fr) | Procédé et appareil de fabrication pour la fabrication d'une composition a partir d'un mélange de formulations | |
| FR3104389A1 (fr) | Appareil de fabrication pour la fabrication d’une composition à partir d’un mélange de formulations |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: UNKNOWN |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE INTERNATIONAL PUBLICATION HAS BEEN MADE |
|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20210712 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| DAV | Request for validation of the european patent (deleted) | ||
| DAX | Request for extension of the european patent (deleted) | ||
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R079 Ref document number: 602019022684 Country of ref document: DE Free format text: PREVIOUS MAIN CLASS: B01F0003200000 Ipc: B01F0023700000 |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: A45D 34/00 20060101ALN20220614BHEP Ipc: A45D 40/24 20060101ALI20220614BHEP Ipc: B01F 35/92 20220101ALI20220614BHEP Ipc: B01F 35/75 20220101ALI20220614BHEP Ipc: B01F 35/71 20220101ALI20220614BHEP Ipc: B01F 35/32 20220101ALI20220614BHEP Ipc: B01F 35/21 20220101ALI20220614BHEP Ipc: B01F 33/501 20220101ALI20220614BHEP Ipc: B01F 31/55 20220101ALI20220614BHEP Ipc: B01F 31/00 20220101ALI20220614BHEP Ipc: B01F 23/70 20220101AFI20220614BHEP |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: A45D 34/00 20060101ALN20220706BHEP Ipc: A45D 40/24 20060101ALI20220706BHEP Ipc: B01F 35/92 20220101ALI20220706BHEP Ipc: B01F 35/75 20220101ALI20220706BHEP Ipc: B01F 35/71 20220101ALI20220706BHEP Ipc: B01F 35/32 20220101ALI20220706BHEP Ipc: B01F 35/21 20220101ALI20220706BHEP Ipc: B01F 33/501 20220101ALI20220706BHEP Ipc: B01F 31/55 20220101ALI20220706BHEP Ipc: B01F 31/00 20220101ALI20220706BHEP Ipc: B01F 23/70 20220101AFI20220706BHEP |
|
| INTG | Intention to grant announced |
Effective date: 20220725 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1534243 Country of ref document: AT Kind code of ref document: T Effective date: 20221215 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: FRENCH |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602019022684 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20221130 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2939050 Country of ref document: ES Kind code of ref document: T3 Effective date: 20230418 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230331 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230228 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20230105 Year of fee payment: 4 Ref country code: CH Payment date: 20221229 Year of fee payment: 4 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1534243 Country of ref document: AT Kind code of ref document: T Effective date: 20221130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230330 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230301 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230517 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221220 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20221231 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221220 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602019022684 Country of ref document: DE |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221220 |
|
| 26N | No opposition filed |
Effective date: 20230831 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221231 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20231221 Year of fee payment: 5 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221220 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20231211 Year of fee payment: 5 Ref country code: FR Payment date: 20231220 Year of fee payment: 5 Ref country code: DE Payment date: 20231208 Year of fee payment: 5 |
|
| PGRI | Patent reinstated in contracting state [announced from national office to epo] |
Ref country code: IT Effective date: 20221231 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20240108 Year of fee payment: 5 |