EP3552730A1 - Stanznietvorrichtung - Google Patents
Stanznietvorrichtung Download PDFInfo
- Publication number
- EP3552730A1 EP3552730A1 EP19160713.4A EP19160713A EP3552730A1 EP 3552730 A1 EP3552730 A1 EP 3552730A1 EP 19160713 A EP19160713 A EP 19160713A EP 3552730 A1 EP3552730 A1 EP 3552730A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- drive
- punch
- oscillating system
- joining direction
- component
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B21—MECHANICAL METAL-WORKING WITHOUT ESSENTIALLY REMOVING MATERIAL; PUNCHING METAL
- B21J—FORGING; HAMMERING; PRESSING METAL; RIVETING; FORGE FURNACES
- B21J15/00—Riveting
- B21J15/10—Riveting machines
- B21J15/16—Drives for riveting machines; Transmission means therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B21—MECHANICAL METAL-WORKING WITHOUT ESSENTIALLY REMOVING MATERIAL; PUNCHING METAL
- B21J—FORGING; HAMMERING; PRESSING METAL; RIVETING; FORGE FURNACES
- B21J15/00—Riveting
- B21J15/02—Riveting procedures
- B21J15/025—Setting self-piercing rivets
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B21—MECHANICAL METAL-WORKING WITHOUT ESSENTIALLY REMOVING MATERIAL; PUNCHING METAL
- B21J—FORGING; HAMMERING; PRESSING METAL; RIVETING; FORGE FURNACES
- B21J15/00—Riveting
- B21J15/10—Riveting machines
- B21J15/12—Riveting machines with tools or tool parts having a movement additional to the feed movement, e.g. spin
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B21—MECHANICAL METAL-WORKING WITHOUT ESSENTIALLY REMOVING MATERIAL; PUNCHING METAL
- B21J—FORGING; HAMMERING; PRESSING METAL; RIVETING; FORGE FURNACES
- B21J15/00—Riveting
- B21J15/10—Riveting machines
- B21J15/28—Control devices specially adapted to riveting machines not restricted to one of the preceding subgroups
Definitions
- the present invention relates to a punch riveting device with a vibrating system, in particular a so-called ultrasonic punch riveting device.
- Methods and devices for punch riveting serve for connecting at least two in a connecting region in particular flat trained components.
- a punch riveting method is characterized in that a pre-punching of the components to be joined together is not required. Rather, a rivet is pressed by means of a punch or a punch tool in the at least two components, which is ensured by a correspondingly shaped counter-holder, for example in the form of a die, which cooperates with the punch tool, that the rivet in a certain manner within deformed the components to be joined together to produce a positive and positive connection between the components while avoiding penetration of the rivet facing away from the component.
- a punch riveting apparatus is known.
- the invention is based on a punch riveting device for connecting at least two components by means of a rivet, with a punch and a counter-holder, between which the at least two components and the rivet can be arranged.
- the punch riveting on a vibrating system, which in turn has the punch and a vibration converter which is so coupled or coupled to a vibration generator that the vibrating system can be excited to vibrate.
- the oscillation converter can be designed, for example, as an electro-mechanical converter, in particular as a piezo converter, and can be connected or coupled directly or indirectly via a so-called booster (or amplitude amplifier) to the stamp, which then also serves as a thankrode.
- the vibration generator can in particular be a frequency or sound generator, in particular an ultrasonic generator, in each case preferably also in the form of a function generator which supplies the vibration converter with a suitable signal, so that it is excited accordingly to oscillate.
- the punch riveting apparatus further comprises a drive, by means of which the oscillating system and thus the punch can be acted upon by a force and movable in a joining direction to a arranged between the punch and a stamp facing component of at least two components arranged rivet by means of the punch in the at least push in two components.
- a drive and guide unit for guiding the oscillating system in the joining direction, which has the drive and is arranged on a frame of the punch riveting device. It is thus formed a combined unit for the drive and the leadership of the vibration system.
- This drive and guide unit or a component thereof encloses the oscillating system in a section extending in the joining direction, or else the drive and guide unit has a first component on which the oscillating system is arranged centrally with respect to the joining direction and the one second component of the drive and guide unit encloses in a joining direction extending portion.
- both variants can be used.
- the drive and guide unit has a guide device for guiding the oscillating system, which surrounds the oscillating system in the section extending in the joining direction as a part or a component of the drive and guide unit.
- the guide device is in particular a separately formed from the drive component.
- This guide device can also be in particular that part of the drive and guide unit which is arranged on the frame.
- a particularly stable guidance of the vibration system is possible, since this is surrounded directly by the guide device.
- the guide device can then be provided, for example, still suitable bearings such as roller, ball or sliding bearings.
- this can then be performed directly or by means of a holder in the guide device.
- a simpler adaptation of the oscillating system to the guide device in particular with regard to the geometry, which can often be very specific for the oscillating system, can be achieved.
- the guide device may be formed in particular tubular with a round or rectangular cross-section.
- a particularly stable guide device is made possible, but on the other hand, a particularly simple production.
- the drive is arranged on the frame and coupled by means of a lever to the oscillating system.
- a lever may in particular be coupled between a pivot point on which the lever is rotatably mounted on the frame, and a point of application of the drive on the lever with the oscillating system, for example via a joint.
- the lever is coupled via the holder, if present, to the oscillating system.
- the drive is integrated in the guide device, and in particular is designed as a linear drive. This allows a particularly compact punch riveting device.
- the drive is designed as a hydraulic drive with a cylinder and a piston, wherein the piston then forms the mentioned first component to which the oscillating system is centrally located with respect to the joining direction, and the cylinder then forms the second component which encloses (as part of the drive and guide means) the first component in the joining direction extending portion.
- the drive is designed as a hydraulic drive with a cylinder and a piston, wherein the piston then forms the mentioned first component to which the oscillating system is centrally located with respect to the joining direction, and the cylinder then forms the second component which encloses (as part of the drive and guide means) the first component in the joining direction extending portion.
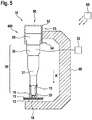
- FIG. 1 is simplified and shown schematically a manufacturing device 100.
- the manufacturing device 100 may be, for example, an industrial robot in a production hall, for example for an automobile body shop.
- the production device 100 has a carrier structure 3 arranged on a base and two arms 4 and 5 arranged thereon and connected to one another and movable.
- a punch riveting device 200 is arranged in a preferred embodiment, which is shown here only schematically and will be described in more detail below.
- a computing unit 80 is shown, which is, for example, a control unit of the punch riveting apparatus 200.
- the arithmetic unit 80 may also be used as a control unit for the entire manufacturing facility, i. be provided in addition to the punch riveting especially for the control of the movable arms.
- display means 90 for example a display, are provided on which, for example, current operating parameters of the punch riveting apparatus can be displayed.
- the element 90 may also be a combined display / input means, e.g. a touchscreen, act.
- FIG. 2 schematically a non-inventive punch riveting apparatus 10 is shown, at which a problem to be solved, which is achieved with the present invention.
- the punch riveting apparatus 10 has a frame 60, which is preferably in the form of a C-frame or C-bracket, on which the individual components are usually arranged in a punch riveting in order to take the desired position to each other.
- the punch rivet 10 for example, on an arm as in FIG. 1 be shown attached.
- the punch riveting apparatus 10 has a punch (or sonotrode) 15, by way of example with a round cross section.
- the punch 15 is radially surrounded by a (sleeve-shaped) hold-down 16 and arranged movable relative to this in the longitudinal direction.
- the hold-down device is preferably fastened to a so-called zero-amplitude passage of the punch, ie a position of the punch at which oscillation amplitudes are zero or at least as low as possible, by means of a spring.
- the punch 15 is coupled to a drive 50, which serves to apply a force F in the joining direction R required for pressing in a rivet 20 into the two components 11, 12.
- the drive 50 can be controlled for example by means of the arithmetic unit 80.
- the force F can be predetermined, for example, via a desired value and recorded as an actual value.
- the hold-down 16 is adapted to press against the surface of the die 15 facing member 11 with a hold-down force.
- a separate drive can be provided.
- the hold-down may also be coupled (as shown here) to the drive of the punch or to the punch itself, for example by means of a spring.
- a counter-holder in the form of a die 18 is arranged on the stamp 15 and the hold-down 16 opposite side of the two components 11, 12, a counter-holder in the form of a die 18 is arranged.
- the punch 15 and the die 18 are in the vertical direction, as well as the hold-16, arranged and movable relative to each other, wherein the die 18 itself is not movable in the rule.
- the hold-down 16 and the die 18 serve to clamp or compress the two components 11, 12 between the hold-down 16 and the die 18 during processing by the punch 15.
- the rivet 20 here by way of example a semi-hollow punch rivet, preferably consists of a material which is harder than the materials of the two components 11, 12, at least in the region of a rivet shank.
- the component 11 facing away from the flat top of the rivet is arranged in operative connection with the punch 15, which rests flat against the top of the rivet 20.
- the punch 15 is operatively connected to an (electro-mechanical) vibration converter 30, for example a piezo-converter.
- the oscillation converter 30 in turn is connected to an (electric) oscillation generator 32, for example an ultrasonic generator. In this way, vibrations or vibrations can be generated and coupled to the stamp and thus the rivet.
- the vibration generator 32 and the vibration converter 30 ultrasonic vibrations with a vibration amplitude (distance between maximum positive and negative amplitude of a vibration, in particular measured at the interface between the punch and rivet) between 10 .mu.m and 110 .mu.m (corresponding to an amplitude of 5 .mu.m to 55 ⁇ m) and a frequency between 15 kHz and 35 kHz or possibly higher.
- the oscillator 32 is connected to the arithmetic unit 80 (or may also be part of the arithmetic unit) and can be controlled by it.
- the drive 50 can be, for example, a ball, roller, planetary thread or threaded roller screw drive or the like which is suitable for applying a force F for pressing in the rivet 20 into the components 11, 12.
- a holding device 35 for example in the form of a frame or a frame attached.
- a vibration system 39 which in the present case comprises the oscillation converter 30, a booster (amplitude amplifier) 31 and the punch or the sonotrode 15 and the hold-down 16 is arranged.
- the high-frequency longitudinal oscillation of the joining tool i. Sonotrode 15, booster 31 and vibration converter 30 come to a lateral migration or kinking or evasion of the joining tool.
- Such lateral forces are in FIG. 2 exemplified by F Q. Moreover, in FIG. 2 the tilting of the joining tool or of the entire oscillating system 39 is also shown graphically. Such transverse forces are not known in previous, conventional punch riveting devices (without vibration or ultrasound support) in these magnitudes, since the joining tool is not subjected to high-frequency longitudinal vibrations.
- FIGS. 3a to 6 are shown schematically punch riveting according to the invention in various preferred embodiments.
- the basic components of these punch riveting apparatuses correspond to the components of the punch riveting apparatus 10 according to FIG. 2 and are provided in this respect with the same reference numerals. In this respect, reference is also made to the description there. The clarity, however, some components are not shown.
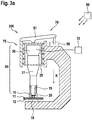
- FIG. 3a schematically a punch rivet 200 according to the invention is shown in a preferred embodiment.
- a drive and guide unit 70 is provided which has the drive 50 and a guide device 75 as components.
- the guide device 75 here by way of example tubular with a round cross-section, is arranged on the frame. It is conceivable that the guide device is formed integrally with the frame, but the guide device 75 can also be attached to the frame in a suitable manner.
- the oscillating system 39 is arranged in a holder 35, which is comparable to in FIG FIG. 2 can be shown bracket. Here, however, the oscillating system 39 is guided by means of the holder 35 in the guide device 75 and thus also in the drive and guide unit 70. This is done here by means of suitable bearings such as roller, ball or plain bearings.
- the drive 50 in turn is arranged on the frame and has a lever 51, which is rotatably mounted, for example by means of a suitable joint to the guide means 75, and on the other hand to the holder 35 and thus to the oscillating system 39 is coupled.
- the drive 50 is secured to the lever 51 accordingly.
- the drive 50 can incidentally, ie in particular with regard to its operation, as with respect to FIG. 2 be explained explained.
- the oscillating system 39 is therefore particularly stable in the joining direction R feasible and movable.
- any resulting from lateral forces tilting or bending can be avoided or at least reduced.
- the guide device 75 which can be configured in a particularly stable manner, as has already been explained in more detail above.
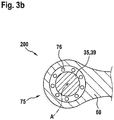
- the punch riveting apparatus 200 is shown in plan view.
- the round cross-section of the tubular guide device 75 with a central axis A can be seen here.
- the holder 35, which carries the oscillating system 39 also has a round cross-section.
- some or all parts of the oscillating system 39 may each have a round cross-section, preferably all with the same central axis A.
- bearings with bearing elements 76, such as balls, which are distributed around the circumference, whereby a particularly uniform and thus stable leadership is achieved.
- the oscillating system can possibly also be guided without the holder 35 in the guide device 75 or the drive and guide unit 70, especially since a guide device with a round cross section is used here.
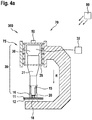
- FIG. 4a schematically a punch rivet 300 according to the invention is shown in a further preferred embodiment.
- the drive 50 is integrated as part of the drive and guide unit 70 in the guide device 75 and thereby formed in particular as a linear drive.
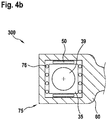
- FIG. 4b In particular, it can be seen that the cross-section of the tubular guide device 75 is rectangular, showing the punch riveting device 300 in a plan view. While the bearings 76 are arranged here on two opposite sides, components of the drive or linear drive 50 are respectively arranged on the other two sides. In this case, the uniform and stable guidance is achieved by an interaction of the bearings 76 with the drive 50 itself.
- the oscillating system usually has a round cross section
- the use of the holder 35 is expedient here.
- the holder 35 which can then have a rectangular cross-section, the best possible guidance by the guide means 75 and thus the drive and guide unit 70 is possible.
- FIG. 5 schematically a punch rivet 400 according to the invention is shown in a further preferred embodiment.
- the drive and guide unit 70 here - in contrast to the punch riveting 200 and 300 - drive and guide structurally combined.
- the drive 50 itself, which is designed here as a hydraulic drive and fastened or arranged on the frame 60, serves as a guide.
- the drive 50 in this case has, in particular, a cylinder 52 with a piston 55 arranged movably therein. At the connections 53 and 54, the drive 50 can be supplied with a suitable hydraulic fluid.
- the piston 55 in this case forms the component on which the oscillating system 39 is arranged centrically with respect to the joining direction R, ie the mentioned first component, and the cylinder 52 forms the second component of the drive and guide unit 70, the first component or surrounds the piston 55 in a extending in the joining direction section.
- the oscillating system 39 can be fastened to the piston 55 in a suitable manner. Also conceivable here is the use of a suitable holder.
- FIG. 6 schematically a punch rivet 500 according to the invention is shown in a further preferred embodiment.
- the punch riveting apparatus 500 basically corresponds to the punch riveting apparatus 400 according to FIG. 5
- a separately formed from the drive 50 guide means 75 is provided, which may be arranged on the frame 60.
- the guide device 75 may be formed comparable to the guide means of the punch riveting device 200, but possibly adjusted in length in the joining direction R.
- a holder for the oscillating system 39 for guidance in the guide device 75 may additionally be provided here, as in the case of the punch riveting device 200. It is also conceivable the simultaneous use of such a holder for guiding in the guide device 75 and for attachment to the piston 55th
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Presses And Accessory Devices Thereof (AREA)
Abstract
Description
- Die vorliegende Erfindung betrifft eine Stanznietvorrichtung mit einem Schwingsystem, insbesondere eine sog. Ultraschallstanznietvorrichtung.
- Verfahren und Vorrichtungen zum Stanznieten dienen zum Verbinden wenigstens zweier in einem Verbindungsbereich insbesondere eben ausgebildeter Bauteile. Ein Stanznietverfahren zeichnet sich dadurch aus, dass ein Vorlochen der miteinander zu verbindenden Bauteile nicht erforderlich ist. Vielmehr wird ein Niet mittels eines Stempels oder eines Stempelwerkzeugs in die wenigstens zwei Bauteile eingedrückt, wobei durch einen entsprechend geformten Gegenhalter, beispielsweise in Form einer Matrize, der mit dem Stempelwerkzeug zusammenwirkt, sichergestellt ist, dass der Niet sich in einer bestimmten Art und Weise innerhalb der miteinander zu verbindenden Bauteile verformt, um eine kraft- und formschlüssige Verbindung zwischen den Bauteilen herzustellen und gleichzeitig ein Durchdringen des dem Niet abgewandten Bauteils zu vermeiden. Aus der
WO 2015/107351 A1 ist beispielsweise eine Stanznietvorrichtung bekannt. - Weiterhin sind beispielsweise aus der
EP 2 318 161 B1 oder derDE 10 2014 203 357 A1 sog. Ultraschall-Stanznietverfahren bzw. -vorrichtungen bekannt, bei denen ein Schwingungserzeuger, wie beispielsweise ein Ultraschall-Generator verwendet wird, um ein oder mehrere Komponenten beim Verbinden der Bauteile in Schwingung zu versetzen. Durch diese Schwingung wird beispielsweise die aufzuwendende Kraft zum Eindrücken des Niets reduziert. Aus derDE 10 2014 224 596 A1 ist beispielsweise eine Ultraschall-Stanznietvorrichtung mit sog. X-Zange bekannt. - Erfindungsgemäß wird eine Stanznietvorrichtung mit den Merkmalen des Patentanspruchs 1 vorgeschlagen. Vorteilhafte Ausgestaltungen sind Gegenstand der Unteransprüche sowie der nachfolgenden Beschreibung.
- Die Erfindung geht aus von einer Stanznietvorrichtung zum Verbinden wenigstens zweier Bauteile mittels eines Niets, mit einem Stempel und einem Gegenhalter, zwischen welchen die wenigstens zwei Bauteile und der Niet anordenbar sind. Dabei weist die Stanznietvorrichtung ein Schwingsystem auf, welches wiederum den Stempel und einen Schwingungskonverter aufweist, der mit einem Schwingungserzeuger derart gekoppelt oder koppelbar ist, dass das Schwingsystem zum Schwingen anregbar ist. Der Schwingungskonverter kann beispielsweise als elektro-mechanischer Wandler, insbesondere als Piezo-Konverter, ausgebildet sein und direkt oder indirekt über einen sog. Booster (bzw. Amplitudenverstärker) mit dem Stempel, der dann auch als Sontrode dient, verbunden bzw. gekoppelt sein. Bei dem Schwingungserzeuger kann es sich insbesondere um einen Frequenz- bzw. Schallgenerator, insbesondere um einen Ultraschallgenerator, jeweils bevorzugt auch in Form eines Funktionsgenerators handeln, der den Schwingungskonverter mit einem geeigneten Signal versorgt, sodass dieser entsprechend zum Schwingen angeregt wird.
- Die Stanznietvorrichtung weist weiterhin einen Antrieb auf, mittels dessen das Schwingsystem und damit der Stempel mit einer Kraft beaufschlagbar und in einer Fügerichtung bewegbar sind, um einen zwischen dem Stempel und einem dem Stempel zugewandten Bauteil der wenigstens zwei Bauteile angeordneten Niet mittels des Stempels in die wenigstens zwei Bauteile einzudrücken.
- Problematisch bei bekannten Stanznietvorrichtungen mit Schwingungseinkopplung kann sein, dass unerwünschte Kippmomente auftreten. Dies gilt besonders dann, wenn der Antrieb und das Schwingsystem in Fügerichtung gesehen in Reihe bzw. hintereinander angeordnet sind. Jedoch kann dies ebenso auftreten, wenn der Antrieb und das Schwingsystem zwar parallel oder zumindest in Fügerichtung gesehen überlappend angeordnet sind, der Antrieb jedoch regulär am Rahmen der Stanznietvorrichtung angebracht ist. Gleiches gilt für die erwähnte Ultraschall-Stanznietvorrichtung mit X-Zange.
- Solche Kippmomente verursachen eine verstärkte Aufbiegung des gesamten Systems bzw. insbesondere des Rahmens der Stanznietvorrichtung, was dazu führt, dass die durch den Antrieb und das Schwingsystem erzeugten Kräfte bzw. Schwingungen nicht mehr senkrecht auf die Oberflächen der zu verbindenden Bauteile wirken. Dies kann zu unerwünschten Effekten im Fügeprozess führen und insbesondere die Symmetrie der erzeugten Nietverbindung negativ beeinflussen. Entsprechend wird auch die Verbindungsfestigkeit negativ beeinflusst.
- Erfindungsgemäß ist eine Antriebs- und Führungseinheit zur Führung des Schwingsystems in Fügerichtung vorgesehen, die den Antrieb aufweist und an einem Rahmen der Stanznietvorrichtung angeordnet ist. Es wird somit eine kombinierte Einheit für den Anrieb und die Führung des Schwingsystems gebildet. Diese Antriebs- und Führungseinheit bzw. eine Komponente davon umschließt dabei das Schwingsystem in einem sich in Fügerichtung erstreckenden Abschnitt, oder aber die Antriebs- und Führungseinheit weist eine erste Komponente auf, an der das Schwingsystem in Bezug auf die Fügerichtung zentrisch angeordnet ist und die eine zweite Komponente der Antriebs- und Führungseinheit in einem sich in Fügerichtung erstreckenden Abschnitt umschließt. Ebenso können beide Varianten verwendet werden.
- Es wird also vorgeschlagen, das Schwingsystem derart zu führen, dass das Schwingsystem oder zumindest eine (bzw. die erste) Komponente der Antriebs- und Führungseinheit, an die das Schwingsystem dann in Fügerichtung gesehen gekoppelt ist, von einer anderen (bzw. der zweiten) Komponente der Antriebs- und Führungseinheit umschlossen wird, was eine deutlich stabilere und verwindungssteifere Führung ermöglicht, als eine einfache Anbindung oder aber auch als eine seitlich angebrachte Führung. Insbesondere wird damit erreicht, dass ein Angriffspunkt der von dem Antrieb bereitgestellten Kraft an dem Schwingsystem in einer sich in Fügerichtung erstreckenden Achse des Schwingsystems liegen kann. Die erwähnten Nachteile werden auf diese Weise vermieden oder zumindest reduziert
- Vorzugsweise weist die Antriebs- und Führungseinheit eine Führungseinrichtung zur Führung des Schwingsystems auf, die als ein Teil bzw. eine Komponente der Antriebs- und Führungseinheit das Schwingsystem in dem sich in Fügerichtung erstreckenden Abschnitt umschließt. Dabei ist die Führungseinrichtung insbesondere eine von dem Antrieb getrennt ausgebildete Komponente. Diese Führungseinrichtung kann zudem insbesondere derjenige Teil der Antriebs- und Führungseinheit sein, der an dem Rahmen angeordnet ist. Auf diese Weise ist eine besonders stabile Führung des Schwingsystems möglich, da dieses direkt von der Führungseinrichtung umgeben ist. In der Führungseinrichtung können dann beispielsweise noch geeignete Lager wie Rollen-, Kugel- oder Gleitlager vorgesehen sein. Je nach Art des Schwingsystems kann dieses dann unmittelbar oder mittels einer Halterung in der Führungseinrichtung geführt sein. Mit einer Halterung kann beispielsweise eine einfachere Anpassung des Schwingsystems an die Führungseinrichtung, insbesondere hinsichtlich der Geometrie, die für das Schwingsystem oftmals sehr spezifisch sein kann, erreicht werden.
- Die Führungseinrichtung kann insbesondere rohrförmig mit rundem oder rechteckigem Querschnitt ausgebildet sein. Damit wird einerseits eine besonders stabile Führungseinrichtung ermöglicht, anderseits aber auch eine besonders einfache Herstellung.
- Vorteilhafterweise ist der Antrieb an dem Rahmen angeordnet und mittels eines Hebels an das Schwingsystem gekoppelt. Damit ist für den Antrieb beispielsweise eine geringere Kraft, die er aufbringen können muss, ausreichend, da eine Übersetzung mittels des Hebels möglich ist. Hierzu kann der Hebel insbesondere zwischen einem Drehpunkt, an dem der Hebel an dem Rahmen drehbar gelagert ist, und einem Angriffspunkt des Antriebs an dem Hebel mit dem Schwingsystem gekoppelt sein, beispielsweise über ein Gelenk. Denkbar ist dabei auch, dass der Hebel über die Halterung, wenn vorhanden, an das Schwingsystem gekoppelt ist.
- Alternativ ist es bevorzugt, wenn der Antrieb in die Führungseinrichtung integriert ist, und insbesondere als Linearantrieb ausgebildet ist. Damit wird eine besonders kompakte Stanznietvorrichtung ermöglicht.
- Weiter alternativ - sowohl als Alternative zur Führungseinrichtung an sich oder aber auch zusätzlich zur Führungseinrichtung - ist es bevorzugt, wenn der Antrieb als hydraulischer Antrieb mit einem Zylinder und einem Kolben ausgebildet ist, wobei der Kolben dann die erwähnte erste Komponente bildet, an der das Schwingsystem in Bezug auf die Fügerichtung zentrisch angeordnet ist, und der Zylinder dann die zweite Komponente bildet, die (als Teil der Antriebs- und Führungseinrichtung) die erste Komponente in dem sich in Fügerichtung erstreckenden Abschnitt umschließt. Damit ist zunächst nicht notwendigerweise eine zusätzliche Führungsrichtung zum Antrieb nötig, da durch diese spezielle Art von Antrieb bereits eine Umschließung einer bewegten Komponente und damit eine stabile Führung ermöglicht werden. Dennoch kann durch eine zusätzliche - insbesondere getrennt vom Antrieb ausgebildete - Führungseinrichtung, die das Schwingsystem in einem entsprechenden Abschnitt umschließt, eine noch stabilere Führung des Schwingsystems erreicht werden.
- Weitere Vorteile und Ausgestaltungen der Erfindung ergeben sich aus der Beschreibung und der beiliegenden Zeichnung.
- Es versteht sich, dass die vorstehend genannten und die nachfolgend noch zu erläuternden Merkmale nicht nur in der jeweils angegebenen Kombination, sondern auch in anderen Kombinationen oder in Alleinstellung verwendbar sind, ohne den Rahmen der vorliegenden Erfindung zu verlassen.
- Die Erfindung ist anhand von Ausführungsbeispielen in der Zeichnung schematisch dargestellt und wird im Folgenden unter Bezugnahme auf die Zeichnung ausführlich beschrieben.
-
- Figur 1
- zeigt vereinfacht und schematisch eine Fertigungseinrichtung mit einer erfindungsgemäßen Stanznietvorrichtung.
- Figur 2
- zeigt schematisch eine nicht erfindungsgemäße Stanznietvorrichtung.
- Figuren 3a und 3b
- zeigen schematisch eine erfindungsgemäße Stanznietvorrichtung in einer bevorzugten Ausführungsform.
- Figuren 4a und 4b
- zeigen schematisch eine erfindungsgemäße Stanznietvorrichtung in einer weiteren bevorzugten Ausführungsform.
- Figuren 5 und 6
- zeigen schematisch erfindungsgemäße Stanznietvorrichtungen weiteren bevorzugten Ausführungsformen.
- In
Figur 1 ist vereinfacht und schematisch eine Fertigungseinrichtung 100 gezeigt. Bei der Fertigungseinrichtung 100 kann es sich beispielsweise um einen Industrieroboter in einer Fertigungshalle, beispielsweise für einen automobilen Karosseriebau, handeln. - Die Fertigungseinrichtung 100 weist dabei eine auf einem Boden angeordnete Trägerstruktur 3 und zwei daran angeordnete, miteinander verbundene und bewegliche Arme 4 und 5 auf. Am Ende des Armes 5 ist eine erfindungsgemäße Stanznietvorrichtung 200 in einer bevorzugten Ausführungsform angeordnet, welche hier nur schematisch gezeigt und nachfolgend noch detaillierter beschrieben wird.
- Weiterhin ist eine Recheneinheit 80 gezeigt, bei der es sich beispielsweise um eine Steuereinheit der Stanznietvorrichtung 200 handelt. Die Recheneinheit 80 kann zudem auch als Steuereinheit für die gesamte Fertigungseinrichtung, d.h. neben der Stanznietvorrichtung insbesondere auch für die Ansteuerung der beweglichen Arme vorgesehen sein. Weiterhin sind Anzeigemittel 90, beispielsweise ein Display, vorgesehen, auf denen beispielsweise aktuelle Betriebsparameter der Stanznietvorrichtung angezeigt werden können. Es kann sich bei dem Element 90 auch um ein kombiniertes Anzeige-/Eingabemittel, z.B. einen Touchscreen, handeln.
- In
Figur 2 ist schematisch eine nicht erfindungsgemäße Stanznietvorrichtung 10 dargestellt, an der eine Problematik erläutert werden soll, die mit der vorliegenden Erfindung gelöst wird. Die Stanznietvorrichtung 10 weist einen Rahmen 60 auf, der vorzugsweise in Form eines C-Rahmens oder C-Bügels vorliegt, an welchem die einzelnen Komponenten bei einer Stanznietvorrichtung in der Regel angeordnet sind, um die gewünschte Position zueinander einnehmen zu können. Über den Rahmen 60 kann die Stanznietvorrichtung 10 beispielsweise an einem Arm wie inFigur 1 gezeigt befestigt sein. - Die Stanznietvorrichtung 10 weist einen Stempel (bzw. eine Sonotrode) 15 auf, beispielhaft mit einem runden Querschnitt. Der Stempel 15 ist von einem (hülsenförmigen) Niederhalter 16 radial umgeben und relativ zu diesem in Längsrichtung beweglich angeordnet. Der Niederhalter ist hierbei vorzugsweise an einem sog. Nullamplitudendurchgang des Stempels, d.h. einer Position des Stempels, an der Schwingungsamplituden Null oder zumindest möglichst gering sind, mittels einer Feder befestigt. Insbesondere ist der Stempel 15 mit einem Antrieb 50 gekoppelt, der dazu dient, eine zum Eindrücken eines Niets 20 in die beiden Bauteile 11, 12 benötigte Kraft F in Fügerichtung R aufzubringen. Der Antrieb 50 kann beispielsweise mittels der Recheneinheit 80 gesteuert werden. Dabei kann die Kraft F beispielsweise über einen Sollwert vorgegeben und als Istwert erfasst werden.
- Ebenfalls ist der Niederhalter 16 dazu eingerichtet, gegen die Oberfläche des dem Stempel 15 zugewandten Bauteils 11 mit einer Niederhaltekraft zu drücken. Hierzu kann beispielsweise ein eigener Antrieb vorgesehen sein. Jedoch kann der Niederhalter auch (wie hier gezeigt) an den Antrieb des Stempels oder an den Stempel selbst gekoppelt sein, beispielsweise mittels einer Feder.
- Auf der dem Stempel 15 und dem Niederhalter 16 gegenüberliegenden Seite der beiden Bauteile 11, 12 ist ein Gegenhalter in Form einer Matrize 18 angeordnet. Der Stempel 15 und die Matrize 18 sind in vertikaler Richtung, wie auch der Niederhalter 16, angeordnet und relativ zueinander bewegbar, wobei die Matrize 18 selbst in der Regel nicht beweglich ist. Der Niederhalter 16 und die Matrize 18 dienen dazu, die beiden Bauteile 11, 12 zwischen dem Niederhalter 16 und der Matrize 18 während der Bearbeitung durch den Stempel 15 einzuspannen bzw. zusammenzudrücken.
- Der Niet 20, hier beispielhaft ein Halbhohlstanzniet, besteht bevorzugt aus einem gegenüber den Werkstoffen der beiden Bauteile 11, 12 härteren Material, zumindest im Bereich eines Nietschafts. Die dem Bauteil 11 abgewandte, ebene Oberseite des Niets ist in Wirkverbindung mit dem Stempel 15 angeordnet, der an der Oberseite des Niets 20 flächig anliegt.
- Der Stempel 15 ist mit einem (elektro-mechanischen) Schwingungskonverter 30, beispielsweise einem Piezokonverter, wirkverbunden. Der Schwingungskonverter 30 wiederum ist mit einem (elektrischen) Schwingungserzeuger 32, beispielsweise einem Ultraschallgenerator, verbunden. Auf diese Weise können Schwingungen bzw. Vibrationen erzeugt und auf den Stempel und damit den Niet eingekoppelt werden. Insbesondere werden mittels des Schwingungserzeugers 32 und des Schwingungskonverters 30 Ultraschallschwingungen mit einer Schwingweite (Abstand zwischen maximaler positiver und negativer Amplitude einer Schwingung, insbesondere gemessen an der Schnittstelle zwischen Stempel und Niet) zwischen 10 µm und 110 µm (entspricht einer Amplitude von 5 µm bis 55 µm) und einer Frequenz zwischen 15 kHz und 35 kHz oder ggf. auch höher erzeugt. Der Schwingungserzeuger 32 ist an die Recheneinheit 80 angebunden (oder kann auch Teil der Recheneinheit sein) und kann von dieser angesteuert werden.
- Bei dem Antrieb 50 kann es sich beispielsweise um einen Antrieb mit Kugel-, Rollen-, Planetengewinde- oder Gewinderollenschraubtrieb oder dergleichen handeln, der dazu geeignet ist, eine Kraft F zum Eindrücken des Niets 20 in die Bauteile 11, 12 aufzubringen. An dem Antrieb 50 ist eine Haltevorrichtung 35, beispielsweise in Form eines Rahmens oder eines Gestells, angebracht. An der Haltevorrichtung 35 ist ein Schwingsystem 39, das vorliegend den Schwingungskonverter 30, einen Booster (Amplitudenverstärker) 31 und den Stempel bzw. die Sonotrode 15 sowie den Niederhalter 16 umfasst, angeordnet.
- Beim Betrieb der Stanznietvorrichtung 10, also beim sog. Ultraschall-Stanznieten, kann es durch die hochfrequente Längsschwingung des Fügewerkzeuges, d.h. Sonotrode 15, Booster 31 und Schwingungskonverter 30, zu einem seitlichen Abwandern bzw. Abknicken oder Ausweichen des Fügewerkzeugs kommen. Dies wird durch hohe seitliche Querkräfte hervorgerufen, welche durch eine hämmernde bzw. schlagende Bewegung des Stempels 15 auf den Niet 20 oder durch eine schwingende Bewegung des Stempels 15 in Dauerkontakt mit dem Niet 20 jeweils in Kombination mit geringsten Unebenheiten (wie beispielsweise Bauteilradien, unebene Bleche, unzureichend eingestellte bzw. gefertigte Werkzeugfluchtung, Aufbiegung des Bügels bzw. Rahmens, unsymmetrischer Aufbau des Bügels und dergleichen auftreten können) und kann die Werkzeugstandzeit und die Fügepunktqualität negativ beeinträchtigen.
- Solche Querkräfte sind in
Figur 2 beispielhaft mit FQ bezeichnet. Zudem ist inFigur 2 das Verkippen des Fügewerkzeugs bzw. des gesamten Schwingsystems 39 auch graphisch dargestellt. Derartige Querkräfte sind bei bisherigen, konventionellen Stanznietvorrichtungen (ohne Schwingungs- bzw. Ultraschallunterstützung) in diesen Größenordnungen nicht bekannt, da das Fügewerkzeug nicht mit hochfrequenten Längsschwingungen beaufschlagt wird. - In den
Figuren 3a bis 6 sind schematisch erfindungsgemäße Stanznietvorrichtungen in verschiedenen bevorzugten Ausführungsformen dargestellt. Die grundlegenden Komponenten dieser Stanznietvorrichtungen entsprechen den Komponenten der Stanznietvorrichtung 10 gemäßFigur 2 und sind insoweit auch mit den gleichen Bezugszeichen versehen. Insofern sei auch auf die dortige Beschreibung verwiesen. Der Übersichtlichkeit sind jedoch teils einzelne Komponenten nicht dargestellt. - In
Figur 3a ist schematisch eine erfindungsgemäße Stanznietvorrichtung 200 in einer bevorzugten Ausführungsform dargestellt. Hierbei ist eine Antriebs- und Führungseinheit 70 vorgesehen, die als Komponenten den Antrieb 50 sowie eine Führungseinrichtung 75 aufweist. Die Führungseinrichtung 75, hier beispielhaft rohrförmig mit rundem Querschnitt, ist dabei an dem Rahmen angeordnet. Denkbar ist, dass die Führungseinrichtung integral mit dem Rahmen ausgebildet ist, ebenso kann die Führungseinrichtung 75 aber auch auf geeignete Weise an dem Rahmen befestigt werden. - Das Schwingsystem 39 ist in einer Halterung 35 angeordnet, welche vergleichbar der in
Figur 2 gezeigten Halterung sein kann. Hier ist das Schwingsystem 39 jedoch mittels der Halterung 35 in der Führungseinrichtung 75 und damit auch in der Antriebs- und Führungseinheit 70 geführt. Dies erfolgt hier mittels geeigneter Lager wie Rollen-, Kugel- oder Gleitlager. - Der Antrieb 50 wiederum ist an dem Rahmen angeordnet und weist einen Hebel 51 auf, der zum einen drehbar, beispielsweise mittels eines geeigneten Gelenks an der Führungseinrichtung 75 angebracht, und zum anderen an die Halterung 35 und damit an das Schwingsystem 39 gekoppelt ist. Zudem ist der Antrieb 50 entsprechend an dem Hebel 51 befestigt. Der Antrieb 50 kann im Übrigen, d.h. insbesondere hinsichtlich seiner Funktionsweise, wie in Bezug auf
Figur 2 erläutert ausgebildet sein. - Auf diese Weise ist das Schwingsystem 39 also besonders stabil in Fügerichtung R führbar und bewegbar. Insbesondere können etwaige, aus Querkräften resultierende Verkippungen oder Aufbiegungen vermieden oder zumindest reduziert werden. Dies liegt insbesondere in der besonders stabil ausgestaltbaren Führungseinrichtung 75 begründet, wie dies eingangs bereits näher erläutert wurde.
- In
Figur 3b ist die Stanznietvorrichtung 200 in einer Draufsicht gezeigt. Hierbei ist insbesondere der runde Querschnitt der rohrförmigen Führungseinrichtung 75 mit einer Mittelachse A zu sehen. Weiterhin ist zu sehen, dass die Halterung 35, welche das Schwingsystem 39 trägt, ebenfalls einen runden Querschnitt aufweist. Auch einige oder alle Teile des Schwingsystems 39 können jeweils einen runden Querschnitt, vorzugsweise alle mit derselben Mittelachse A, aufweisen. - Zudem gezeigt ist eines der Lager mit Lagerelementen 76, beispielsweise Kugeln, die hier um den Umfang verteilt sind, wodurch eine besonders gleichmäßige und damit stabile Führung erreicht wird.
- Es sei angemerkt, dass das Schwingsystem ggf. auch ohne die Halterung 35 in der Führungseinrichtung 75 bzw. der Antriebs- und Führungseinheit 70 geführt sein kann, zumal hier eine Führungseinrichtung mit rundem Querschnitt verwendet wird.
- In
Figur 4a ist schematisch eine erfindungsgemäße Stanznietvorrichtung 300 in einer weiteren bevorzugten Ausführungsform dargestellt. Im Unterschied zu der Stanznietvorrichtung 200 gemäß denFiguren 3a und3b ist der Antrieb 50 als Teil der Antriebs- und Führungseinheit 70 in die Führungseinrichtung 75 integriert und dabei insbesondere als Linearantrieb ausgebildet. - In
Figur 4b , die die Stanznietvorrichtung 300 in einer Draufsicht zeigt, ist insbesondere zu sehen, dass der Querschnitt der rohrförmigen Führungseinrichtung 75 rechteckig ist. Während die Lager 76 hier an zwei gegenüberliegenden Seiten angeordnet sind, sind an den beiden anderen Seiten jeweils Komponenten des Antriebs bzw. Linearantriebs 50 angeordnet. In diesem Fall wird die gleichmäßige und stabile Führung durch ein Zusammenspiel der Lager 76 mit dem Antrieb 50 selbst erreicht. - Da das Schwingsystem in aller Regel einen runden Querschnitt aufweist, ist hier der Einsatz der Halterung 35 zweckmäßig. Durch die Halterung 35, die dann einen rechteckigen Querschnitt aufweisen kann, ist eine möglichst gute Führung durch die Führungseinrichtung 75 und damit die Antriebs- und Führungseinheit 70 möglich.
- Im Übrigen, d.h. insbesondere für andere Komponenten als den Antrieb 50, sei an dieser Stelle auch auf die
Figuren 3a und3b mit zugehöriger Beschreibung verwiesen, die hier entsprechend gelten. - In
Figur 5 ist schematisch eine erfindungsgemäße Stanznietvorrichtung 400 in einer weiteren bevorzugten Ausführungsform dargestellt. Bei der Antriebs- und Führungseinheit 70 sind hier - im Gegensatz zu den Stanznietvorrichtungen 200 und 300 - Antrieb und Führung baulich kombiniert. Insbesondere dient der Antrieb 50 selbst, der hier als hydraulischer Antrieb ausgebildet und an dem Rahmen 60 befestigt bzw. angeordnet ist, als Führung. - Der Antrieb 50 weist dabei insbesondere einen Zylinder 52 mit einem darin beweglich angeordneten Kolben 55 auf. An den Anschlüssen 53 und 54 kann der Antrieb 50 mit einem geeigneten Hydraulikfluid versorgt werden.
- Der Kolben 55 bildet hierbei diejenige Komponente, an der das Schwingsystem 39 in Bezug auf die Fügerichtung R zentrisch angeordnet ist, also die erwähnte erste Komponente, und der Zylinder 52 bildet die zweite Komponente der Antriebs- und Führungseinheit 70, die die erste Komponente bzw. den Kolben 55 in einem sich in Fügerichtung erstreckenden Abschnitt umschließt. Das Schwingsystem 39 kann dabei auf geeignete Weise an dem Kolben 55 befestigt sein. Denkbar ist auch hier die Verwendung einer geeigneten Halterung.
- In
Figur 6 ist schematisch eine erfindungsgemäße Stanznietvorrichtung 500 in einer weiteren bevorzugten Ausführungsform dargestellt. Die Stanznietvorrichtung 500 entspricht im Grunde der Stanznietvorrichtung 400 gemäßFigur 5 , jedoch ist zusätzlich eine getrennt von dem Antrieb 50 ausgebildete Führungseinrichtung 75 vorgesehen, die an dem Rahmen 60 angeordnet sein kann. - Damit werden die durch den Antrieb 50 selbst bereitgestellte Führung und die Führung mittels der Führungseinrichtung 75 kombiniert, sodass eine noch gleichmäßigere und stabilere Führung ermöglicht wird. Die Führungseinrichtung 75 kann dabei vergleichbar der Führungseinrichtung der Stanznietvorrichtung 200 ausgebildet sein, ggf. jedoch angepasst in der Länge in Fügerichtung R.
- Ebenso kann hier zusätzlich, wie bei der Stanznietvorrichtung 200, eine Halterung für das Schwingsystem 39 zur Führung in der Führungseinrichtung 75 vorgesehen sein. Denkbar ist auch die gleichzeitige Verwendung einer solchen Halterung zur Führung in der Führungseinrichtung 75 und zur Befestigung an dem Kolben 55.
Claims (10)
- Stanznietvorrichtung (200, 300, 400, 500) zum Verbinden wenigstens zweier Bauteile (11, 12) mittels eines Niets (20), mit einem Stempel (15) und einem Gegenhalter (18), zwischen welchen die wenigstens zwei Bauteile (11, 12) und der Niet (20) anordenbar sind, mit einem Schwingsystem (39), aufweisend den Stempel (15) und einen Schwingungskonverter (30), der mit einem Schwingungserzeuger (32) derart gekoppelt oder koppelbar ist, dass das Schwingsystem (39) zum Schwingen anregbar ist, und mit einem Antrieb (50), mittels dessen das Schwingsystem (39) und damit der Stempel (15) mit einer Kraft (F) beaufschlagbar und in einer Fügerichtung (R) bewegbar sind, um einen zwischen dem Stempel (15) und einem dem Stempel zugewandten Bauteil (11) der wenigstens zwei Bauteile angeordneten Niet (20) mittels des Stempels (15) in die wenigstens zwei Bauteile (11, 12) einzudrücken, gekennzeichnet durch eine Antriebs- und Führungseinheit (70) zur Führung des Schwingsystems (39) in Fügerichtung (R), die den Antrieb (50) aufweist und an einem Rahmen (60) der Stanznietvorrichtung angeordnet ist, und die das Schwingsystem (39) in einem sich in Fügerichtung (R) erstreckenden Abschnitt umschließt, und/oder die eine erste Komponente (55) aufweist, an der das Schwingsystem (39) in Bezug auf die Fügerichtung (R) zentrisch angeordnet ist, und die eine zweite Komponente aufweist, die die erste Komponente in einem sich in Fügerichtung (R) erstreckenden Abschnitt umschließt.
- Stanznietvorrichtung (200, 300, 500) nach Anspruch 1, wobei die Antriebs- und Führungseinheit (70) eine Führungseinrichtung (75) zur Führung des Schwingsystems (39) aufweist, die als Teil der Antriebs- und Führungseinheit das Schwingsystem (39) in dem sich in Fügerichtung erstreckenden Abschnitt umschließt.
- Stanznietvorrichtung (200, 300, 500) nach Anspruch 2, wobei die Führungseinrichtung (70) eine von dem Antrieb (50) getrennt ausgebildete Komponente ist.
- Stanznietvorrichtung (200, 300) nach Anspruch 2 oder 3, wobei das Schwingsystem (39) unmittelbar oder mittels einer Halterung (35) in der Führungseinrichtung (75) geführt ist.
- Stanznietvorrichtung (200, 300) nach einem der Ansprüche 2 bis 4, wobei die Führungseinrichtung (75) rohrförmig mit rundem oder rechteckigem Querschnitt ausgebildet ist.
- Stanznietvorrichtung (200) nach einem der Ansprüche 2 bis 5, wobei der Antrieb (50) an dem Rahmen (50) angeordnet und mittels eines Hebels (51) an das Schwingsystem (39) gekoppelt ist.
- Stanznietvorrichtung (300) nach einem der Ansprüche 2 bis 5, wobei der Antrieb (50) in die Führungseinrichtung (75) integriert ist, und insbesondere als Linearantrieb ausgebildet ist.
- Stanznietvorrichtung (400, 500) nach einem der Ansprüche 1 bis 5, wobei der Antrieb (50) als hydraulischer Antrieb mit einem Zylinder (52) und einem Kolben ausgebildet ist, wobei der Kolben die erste Komponente (55) der Antriebs- und Führungseinheit bildet, an der das Schwingsystem (39) in Bezug auf die Fügerichtung zentrisch angeordnet ist, und wobei der Zylinder (52) die zweite Komponente der Antriebs- und Führungseinrichtung bildet.
- Stanznietvorrichtung (200, 300, 400, 500) nach einem der vorstehenden Ansprüche, wobei die Antriebs- und Führungseinheit (70) derart ausgebildet ist, dass ein Angriffspunkt der von dem Antrieb (50) bereitgestellten Kraft an dem Schwingsystem in einer sich in Fügerichtung erstreckenden Achse des Schwingsystems (39) liegt.
- Stanznietvorrichtung (200, 300, 400, 500) nach einem der vorstehenden Ansprüche, wobei der Schwingungserzeuger (32) als Schallgenerator, insbesondere als Ultraschall-Generator, ausgebildet ist.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102018205531.9A DE102018205531A1 (de) | 2018-04-12 | 2018-04-12 | Stanznietvorrichtung |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3552730A1 true EP3552730A1 (de) | 2019-10-16 |
| EP3552730B1 EP3552730B1 (de) | 2021-01-27 |
Family
ID=65717746
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP19160713.4A Active EP3552730B1 (de) | 2018-04-12 | 2019-03-05 | Stanznietvorrichtung |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP3552730B1 (de) |
| DE (1) | DE102018205531A1 (de) |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3483611A (en) * | 1966-08-12 | 1969-12-16 | Cavitron Corp | Methods and apparatus for assembling parts together by ultrasonic energy |
| DE19905527A1 (de) * | 1999-02-10 | 2000-08-17 | Boellhoff Gmbh | Vorrichtung zum Fügen von Werkstücken aus duktilem Material |
| EP2318161A1 (de) | 2008-07-30 | 2011-05-11 | Henrob Limited | Fügevorrichtung und -verfahren |
| WO2015107351A1 (en) | 2014-01-16 | 2015-07-23 | Henrob Limited | Mounting assembly |
| DE102014203357A1 (de) | 2014-02-25 | 2015-08-27 | Henkel Ag & Co. Kgaa | Darreichungseinheit für eine Masse |
| DE102014224596A1 (de) | 2014-12-02 | 2016-06-02 | Robert Bosch Gmbh | Stanznietzange mit Vibrationsunterstützung in X-Bauart |
| DE102016214534A1 (de) * | 2016-08-05 | 2018-02-08 | Robert Bosch Gmbh | Stanznietvorrichtung und Fertigungsvorrichtung |
-
2018
- 2018-04-12 DE DE102018205531.9A patent/DE102018205531A1/de not_active Withdrawn
-
2019
- 2019-03-05 EP EP19160713.4A patent/EP3552730B1/de active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3483611A (en) * | 1966-08-12 | 1969-12-16 | Cavitron Corp | Methods and apparatus for assembling parts together by ultrasonic energy |
| DE19905527A1 (de) * | 1999-02-10 | 2000-08-17 | Boellhoff Gmbh | Vorrichtung zum Fügen von Werkstücken aus duktilem Material |
| EP2318161A1 (de) | 2008-07-30 | 2011-05-11 | Henrob Limited | Fügevorrichtung und -verfahren |
| WO2015107351A1 (en) | 2014-01-16 | 2015-07-23 | Henrob Limited | Mounting assembly |
| DE102014203357A1 (de) | 2014-02-25 | 2015-08-27 | Henkel Ag & Co. Kgaa | Darreichungseinheit für eine Masse |
| DE102014224596A1 (de) | 2014-12-02 | 2016-06-02 | Robert Bosch Gmbh | Stanznietzange mit Vibrationsunterstützung in X-Bauart |
| DE102016214534A1 (de) * | 2016-08-05 | 2018-02-08 | Robert Bosch Gmbh | Stanznietvorrichtung und Fertigungsvorrichtung |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102018205531A1 (de) | 2019-10-17 |
| EP3552730B1 (de) | 2021-01-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3117924B1 (de) | Verfahren zum verbinden wenigstens zweier bauteile mittels einer stanznietvorrichtung und fertigungseinrichtung | |
| EP3124803B1 (de) | Stanznietvorrichtung | |
| EP3120951B1 (de) | Stanznietvorrichtung und fertigungsvorrichtung | |
| EP3117923B1 (de) | Verfahren zum verbinden wenigstens zweier bauteile mittels einer stanznietvorrichtung und fertigungseinrichtung | |
| EP3505270B1 (de) | Setzeinheit für eine stanznietvorrichtung, stanznietvorrichtung und verfahren zum herstellen einer solchen | |
| EP3120950B1 (de) | Übertragungselement für eine stanznietvorrichtung, stanznietvorrichtung, fertigungseinrichtung und verfahren zum ermitteln eines schwingungsverhaltens | |
| EP3552729B1 (de) | Stanznietvorrichtung | |
| WO2000018528A1 (de) | Verfahren und vorrichtung zum verbinden von sich überlappenden plattenförmigen bauteilen | |
| EP3281721B1 (de) | Verfahren zum verbinden wenigstens zweier bauteile mittels einer stanznietvorrichtung und fertigungseinrichtung | |
| EP3552730B1 (de) | Stanznietvorrichtung | |
| DE102019107539A1 (de) | Gestell für eine Bearbeitungsmaschine und Verfahren zum Bearbeiten eines Werkstücks mit derselben | |
| EP3552731B1 (de) | Setzeinheit für eine stanznietvorrichtung und stanznietvorrichtung | |
| DE102018222841A1 (de) | Setzeinheit für eine Stanznietvorrichtung, Stanznietvorrichtung und Verfahren zum Verbinden von Bauteilen | |
| EP3546084B1 (de) | Verfahren zum verbinden wenigstens zweier bauteile mittels einer stanznietvorrichtung und stanznietvorrichtung | |
| DE102016214534A1 (de) | Stanznietvorrichtung und Fertigungsvorrichtung | |
| DE102006053223B3 (de) | Loch- und Durchzugsstempel | |
| DE102017209020A1 (de) | Fügevorrichtung und Verfahren zum Betreiben einer Fügevorrichtung | |
| DE102021117169A1 (de) | Ultraschallschweißanlage sowie Verfahren zur schweißenden Bearbeitung von Materialien | |
| DE102018203720A1 (de) | Stanznietvorrichtung | |
| DE102017213233A1 (de) | Stanznietvorrichtung und Verfahren zum Verbinden von Bauteilen | |
| DE102017209264A1 (de) | Stanznietvorrichtung mit Schwingungserzeuger und Beschleunigungssensor | |
| DE102017213242A1 (de) | Fügevorrichtung | |
| DE102017215108A1 (de) | Stanznietvorrichtung und Verfahren zum Verbinden wenigstens zweier Bauteile | |
| EP3388165A1 (de) | Stanznietvorrichtung und fertigungseinrichtung | |
| DE102016208067A1 (de) | Stanznietvorrichtung und Fertigungsvorrichtung |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: ROBERT BOSCH GMBH |
|
| 17P | Request for examination filed |
Effective date: 20200416 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: B21J 15/02 20060101AFI20200915BHEP Ipc: B21J 15/16 20060101ALI20200915BHEP Ipc: B21J 15/12 20060101ALI20200915BHEP Ipc: B21J 15/24 20060101ALI20200915BHEP |
|
| INTG | Intention to grant announced |
Effective date: 20201016 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1357878 Country of ref document: AT Kind code of ref document: T Effective date: 20210215 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502019000751 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20210127 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210527 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210427 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210427 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210428 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210527 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502019000751 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20210331 |
|
| 26N | No opposition filed |
Effective date: 20211028 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210327 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210305 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210305 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210527 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210331 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220331 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220331 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210127 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20190305 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20230305 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230305 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230305 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 1357878 Country of ref document: AT Kind code of ref document: T Effective date: 20240305 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20250522 Year of fee payment: 7 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20240305 |