EP3418825A1 - Systems and methods for safety input devices - Google Patents
Systems and methods for safety input devices Download PDFInfo
- Publication number
- EP3418825A1 EP3418825A1 EP18169580.0A EP18169580A EP3418825A1 EP 3418825 A1 EP3418825 A1 EP 3418825A1 EP 18169580 A EP18169580 A EP 18169580A EP 3418825 A1 EP3418825 A1 EP 3418825A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- safety
- safety controller
- circuitry
- controller
- signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
- 238000000034 method Methods 0.000 title claims description 64
- 238000004891 communication Methods 0.000 claims abstract description 37
- 230000008859 change Effects 0.000 claims abstract description 16
- 238000012545 processing Methods 0.000 claims description 4
- 230000008569 process Effects 0.000 description 46
- 238000010586 diagram Methods 0.000 description 10
- 238000012544 monitoring process Methods 0.000 description 9
- 230000006870 function Effects 0.000 description 6
- 238000004519 manufacturing process Methods 0.000 description 3
- 230000004044 response Effects 0.000 description 3
- 230000008901 benefit Effects 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 238000011161 development Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000008030 elimination Effects 0.000 description 1
- 238000003379 elimination reaction Methods 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 230000007363 regulatory process Effects 0.000 description 1
- 231100000279 safety data Toxicity 0.000 description 1
Images



Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/04—Programme control other than numerical control, i.e. in sequence controllers or logic controllers
- G05B19/042—Programme control other than numerical control, i.e. in sequence controllers or logic controllers using digital processors
- G05B19/0428—Safety, monitoring
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/04—Programme control other than numerical control, i.e. in sequence controllers or logic controllers
- G05B19/048—Monitoring; Safety
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B9/00—Safety arrangements
- G05B9/02—Safety arrangements electric
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01H—ELECTRIC SWITCHES; RELAYS; SELECTORS; EMERGENCY PROTECTIVE DEVICES
- H01H19/00—Switches operated by an operating part which is rotatable about a longitudinal axis thereof and which is acted upon directly by a solid body external to the switch, e.g. by a hand
- H01H19/64—Encased switches adapted for ganged operation when assembled in a line with identical switches, e.g. stacked switches
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39447—Dead man switch
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/50—Machine tool, machine tool null till machine tool work handling
- G05B2219/50198—Emergency stop
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
Definitions
- the invention relates generally to the field of automation systems. More specifically, the present application relates to safety input devices for automation systems.
- the safety input devices may be used as part of a safety control system within an automation system.
- discrete tether wiring is typically used to connect the safety input devices to a safety control system via a local safety input/output (I/O) module and/or a local safety controller.
- on-machine safety input devices typically have a wired connection to a local safety I/O module and/or a local safety controller. That is, safety input devices generally call for a safety controller, and/or a safety I/O module dedicated to the safety input devices in order to function. Therefore, it may be desirable to allow for safety input devices to function without using wiring, a dedicated safety controller, and/or safety I/O modules.
- a system in a first embodiment, includes a safety controller that, in operation, interrupts power to industrial automation devices or puts the system into a safe state upon command of a human operator.
- the system also includes an emergency stop switch circuit actuatable by a human operator and a human machine interface in data communication with the safety controller and the emergency stop switch circuit.
- the human machine interface includes integrated safety circuitry that, in operation, detects a change of state of the emergency stop switch circuit and provides a signal to the safety controller to interrupt power to the industrial automation devices or put the system into a safe state.
- a system in another embodiment, includes a human machine interface that, in operation, is in data communication with a safety controller and to an emergency stop switch circuit.
- the human machine interface includes integrated safety circuitry that, in operation, detects a change of state of the emergency stop switch circuit and provides a signal to the safety controller to interrupt power to the industrial automation devices or put the industrial automation devices into a safe state.
- a method in yet another embodiment, includes receiving, in integrated safety circuitry of a human machine interface, a stop signal from an emergency stop circuit actuated by a human operator. The method also includes communicating a safety signal from the integrated safety circuitry to a safety controller of an automation system based upon the received stop signal and interrupting power to automation devices or putting the automation system into a safe state via the safety controller based upon the safety signal.
- Automation systems often utilize safety input devices such as human-machine interfaces.
- the safety input devices may be used as part of a safety control system within an automation system that is used to alter operation of the automation system.
- mobile devices e.g., tablets
- discrete tether wiring is typically used to connect the safety input devices to a safety control system via a local safety input/output (I/O) module and/or a local safety controller.
- on-machine safety input devices typically have a dedicated wired connection to a local safety I/O module and/or a local safety controller. That is, safety input devices generally call for a safety controller, and/or a safety I/O module in order to function.
- the presently disclosed techniques allow for safety input devices to be connected to automation systems without using dedicated discrete wiring to the safety input device. Moreover the techniques disclosed herein allow for safety input devices to be connected to automation system without a local safety I/O module or a local safety controller. In other words, the presently disclosed techniques enable the elimination of the discrete wiring, safety I/O module, and safety controller that are specifically dedicated to safety input devices.
- FIG. 1 is a schematic diagram of an automation system 10.
- the automation system 10 allows for control and/or monitoring of a machine/process 12.
- the machine/process 12 may take many forms and include devices for accomplishing many different and varied purposes.
- the machine/process 12 may include a manufacturing line or station, a material handling system, an assembly process, a compressor station, an oil refinery, a batch operation for making food items, or any mechanized and automated system.
- the machine/process 12 may include a variety of operational components, such as electric motors, motor drives and controllers, sensors and instrumentation, actuators, feedback devices, automation controllers, computers, and so forth.
- the machine/process 12 will typically include control and monitoring equipment for regulating process variables through automation and/or monitoring.
- the illustrated machine/process 12 has actuators 14 and sensors 16.
- the actuators 14 include one or more devices adapted to perform a mechanical action in response to a signal from an automation controller 18, such as motors and associated drives.
- the sensors 16 include one or more devices that provide information regarding the operation and/or conditions of the machine/process 12 to the automation controller 18, such as for monitoring, open and closed-loop control, and so forth.
- the sensors 16 and actuators 14 serve to allow automation of the machine/process 12 in accordance with programming or protocols implemented by the automation controller 18.
- the sensors 16 and actuators 14 may be utilized within any number of preset process loops that are monitored and controlled by the automation controller 18 or any other control and/or monitoring equipment located locally to the system or remotely (e.g., enterprise systems, remote monitoring systems, etc.).
- Such process loops may be activated based on process inputs (e.g., input from one of the sensors 16) or direct operator input (e.g., input received via a human-machine interface associated with the automation controller 18).
- process inputs e.g., input from one of the sensors 16
- direct operator input e.g., input received via a human-machine interface associated with the automation controller 18.
- the automation system 10 may include more than one automation controller 18, and these may operate independently or inter-dependently in accordance with the nature and operation of the system/process.
- Components of the automation system 10 such as the machine/process 12, actuators 14, sensors 16, and automation controller 18 may be coupled to and/or in communication with a power network 20 and a data network 22.
- the power network 20 supplies electric power (e.g., three-phase alternating current electric power) to the automation system 10 and various components of the automation system 10.
- the data network 22 may be used to send and receive data. For example, data from the sensors 16 is relayed to the automation controller 18, and commands from the automation controller 18 are sent to the actuators 14 via the data network 22.
- the data network 22 may be a wireless network.
- a remote control/monitoring system 24 receives data regarding the automation system 10 via the data network 22 and control the machine/process 12 based on the received data. More specifically, the remote control/monitoring system 24 can send commands that change operational parameters of the actuators 16 of the machine/process 12.
- the remote control/monitoring system 24 may also be communicatively coupled to an enterprise network 26.
- the enterprise network 26 may include other machines and/or processes, groupings of machines and/or processes, and/or networks of automation machines and/or automated devices.
- the enterprise network 26 may also include a data network that is used to transmit data regarding with the automation system 10 to other systems with which the automation system 10 may be associated.
- the automation system 10 may be part of a larger system or process, and the enterprise network 26 may be used to transmit data throughout the larger system or process. Data from the other systems and/or the larger system may also be received by the enterprise network 26.
- the enterprise network 26 may include a wireless network.
- the safety controller 28 which is coupled to the power network 20 and data network 22, monitors data associated with the automation system 10 as well as the components of the automation system 10 (e.g., machine/process 12). Moreover, the safety controller 28 may effect changes based on the received data. For example, in response to signals indicative of certain conditions such as signals generated by operator input, the safety controller 28 may interrupt the flow of electric power to the machine/process 12 and/or put the automation system 10 or components thereof into a safe state. Additionally, as discussed below, the safety controller 28 can also change operational characteristics of the automation system 10 based on operator input. Furthermore, the safety controller 28 may be remotely located on the machine/process 12.
- the safety controller 28 is communicatively coupled to a human-machine interface (HMI) 30 that displays information to an operator as well as receives operator input. More specifically, the HMI 30 may send and receive data to and from the safety controller 28 via the data network 22.
- the HMI includes emergency stop circuitry such as an emergency stop (E-stop) 32 (e.g., a push-button) and/or a live-man switch 34, which, depending on the embodiment, may also be known as a three-position enable switch or a grip switch.
- E-stop 32 and live-man switch 34 can be utilized by an operator to provide input, such as input indicative of a request to shut down the machine/process 12 and/or the automation system 10.
- the operator may press (or in some embodiments, pull) the push-button
- the safety controller 28 may determine that the pressing of the push-button is indicative of a request to shut down the automation system 10, and the safety controller 28 may cause the automation system 10 to shut down (e.g., via interrupting the now of power to automation system 10).
- the HMI 30 may be a wireless device that communicates with the safety controller 28 wirelessly, while in other embodiments, the HMI 30 may be a wired device that communicates with the safety controller 28 via a wired connection. In embodiments in which the HMI 30 is wired, it should be noted that the HMI 30 is wired to the safety controller 28 without using a wire dedicated to the transmission of safety data and/or signals.
- the HMI 30 may also include circuitry that recognizes operator input as being indicative of a request to interrupt the operation of the automation system 10 and send a signal to the safety controller 28 to interrupt power to the automation system 10 and/or components thereof (e.g., the machine/process 12) or put the automation system 10 into a safe state.
- the safety controller 28 also includes a profile 36.
- the profile 36 may be software or instructions that are be stored on memory circuitry included within and/or accessible by the safety controller 28 and executed by a processor associated with the safety controller 28. More specifically, the profile 36 allows for signals from the HMI 30 to be interpreted and/or implemented by the safety controller 28. For example, the profile 36 enables recognition of the circuitry associated with the HMI 30 and allows for signals from the HMI 30 to interrupt the flow of power to the automation system 10 or put the automation system 10 into a safe state. More specifically, the profile 36 may enable recognition of signals that are sent from the HMI 30 as a result of an operator input via the E-stop 32 and/or the live-man switch 34.
- the profile 36 when executed by the safety controller 28, enables the safety controller 28 to determine that the signal is indicative of a request to interrupt power to the automation system 10 or put the automation system 10 into a safe state as well as to permit the safety controller 28 to cause an interruption to the power to the automation system 10 and/or components of the automation system 10 or put the automation system 10 into a safe state.
- the safety controller 28 may send a signal that causes power from the power network 20 to not reach the machine/process (e.g., break a circuit).
- the automation network 10 also includes E-stops 38 that are not included in the HMI 30. As illustrated, the E-stops 38 may be push-buttons. When used, the E-stops 38 cause power to the automation system 10 and/or components of the automation system 10 such as the machine/process 12 to be interrupted or cause the automation system 10 or components thereof to be put into a safe state. For example, when an operator utilizes an E-stop 38, the E-stop could cause an interruption to the power network 20.
- Use of the E-stops 38 may also cause a signal to be sent via the data network 22 to the automation controller 18 or the safety controller 28, and in response, the automation controller 18 and/or safety controller 28 may change the operating parameters of the machine/process 12 or automation system 10 to put the automation system 10 or components of the automation system 10 into a safe state.
- FIG. 2 is a schematic diagram of an on-machine safety module 40 and HMI 30 that may be included in an automation system, such as the automation system 10.
- the on-machine safety module 40 may be located on the machine/process 12.
- the HMI 30 communicates with components of the safety module 40 without using a communication means that is dedicated to communicating safety information and/or signals to and from the HMI 30.
- the techniques described in the illustrated embodiment may be used to remove independent communication means (e.g., a discrete cable) typically used to transmit data from a safety input device such as an HMI to the machine associated with the HMI.
- the on-machine safety module 40 includes several components.
- the on-machine safety module 40 includes an optional safety I/O module 42, a transmitter/receiver 44, and a safety controller 28.
- the transmitter/receiver 44 may be a microprocessor that is configured to transmit and/or receive data from the HMI 30, and the transmitter/receiver 44 may be integrated into the safety controller 28.
- the transmitter/receiver function is discussed in greater detail below.
- the safety controller 36 receives data from the transmitter/receiver 44. Additionally, actuators 14 and sensors 16 may be communicatively coupled to a safety I/O module 42, and the safety controller 28 may send and receive data to and from the actuators 14 and sensors 16 via the safety I/O module 42. However, while communication between components of the automation 10 and the safety controller 28 may be conducted via the I/O module 42, it should be noted that such a technique is strictly optional. For instance, in some embodiments, the transmitter/receiver 44 may be included within the safety controller 36 and receive and transmit data to and from components of the automation system 10. Accordingly, the safety I/O module 42 is not specifically needed to communicate with the HMI 30.
- the safety controller 28 may receive and monitor data related to an automation system (e.g., automation system 10) and/or components or devices thereof. As described below, the safety controller 28 may interrupt power to the components and devices of the automation system 10 or put the automation system 10 into a safe state based on operator input (e.g., operator input made via the HMI 30).
- an automation system e.g., automation system 10
- the safety controller 28 may interrupt power to the components and devices of the automation system 10 or put the automation system 10 into a safe state based on operator input (e.g., operator input made via the HMI 30).
- the HMI 30 also includes several components. As illustrated, the HMI 30 includes an integrated safety circuit 46 that is communicatively coupled to an E-stop 32, a live-man switch 34, and a transmitter/receiver 48.
- the integrated safety circuit 46 detects changes regarding the E-stop 32 and the live-man switch 34 and sends signals to the safety controller 28 based on the changes. More specifically, the integrated safety circuit 46 may detect a change in a state of the E-stop 32 and/or the live-man switch 34 and/or receive a signal from the E-stop 32 and/or the live-man switch 34 and provide a signal to the safety controller 28 to interrupt power to the machine/process 12 and/or other machines, processes, and/or devices associated with the automation system 10 based on the detected change.
- the E-stop 32 and the live-man switch 34 may each include circuitry that enable the E-stop 32 and live-man switch 34 to cause electric power (e.g., power provided by the power network 20) to be interrupted to the automation system 10 and/or the machine-process 12.
- the E-stop 32 and the live-man switch 34 may include circuitry, such as switches (e.g., contact switches), that when actuated cause a signal (e.g., electrical signal) to be sent to the integrated safety circuit 46.
- the live-man switch 34 may include contacts with default states. That is, some contacts that are normally open (“NO") and other contacts that are normally closed (“NC").
- An operator may actuate the live-man switch 34 (i.e., cause a change in state of one or more of the contacts from a default state (e.g., change a normally open contact to a closed position)), which causes the machine/process 12 to operate and/or receive electrical power.
- a default state e.g., change a normally open contact to a closed position
- the live-man switch 34 is a three position enabling device, which means the live-man has three positions.
- the live-man switch 34 may be a device that has a grip or trigger switch with three positions, and each of the positions may correspond to a state of the contacts in the circuitry of the live-man switch 34.
- a default state of live-man e.g., no power to machine/process 12
- the first state may correspond to when the grip or trigger switch has no pressure applied to it by the operator.
- a second position may correspond to when the operator grips the grip or trigger switch, which may cause a change in state of the circuitry of the live-man switch 34 (e.g., cause some of the contacts to open or close).
- the third state may correspond to when the operators grips the grip or trigger switch with a certain amount of pressure that is greater than that applied to cause the second state to occur.
- the E-stop 32 may include one or more contacts that are normally open. An operator may press, pull, or otherwise actuate the E-stop 32 to cause the contacts to close (e.g., complete a circuit).
- each state of the E-stop 32 or the live-man switch 34 may cause various signals to be sent to the integrated safety circuit 46, and at least one state of each the E-stop 32 and the live-man switch 34 causes a signal to be sent to the integrated safety circuit 46 that corresponds to operator input (e.g., actuation of the E-stop 32 or live-man switch 34) associated with a request to interrupt power to the automation system 10 and/or the machine/process 12.
- operator input e.g., actuation of the E-stop 32 or live-man switch 34
- a signal may be sent to the integrated safety circuit 46, which may send a signal to the safety controller 28 to interrupt power to the machine/process 12 or automation system 10 or put the machine/process 12 or automation system 10 into a safe state.
- the integrated safety circuit 46 may also detect the states of the E-stop 32 and the live-man switch 34 based on the signals received from the E-stop 32 and the live-man switch 34.
- the integrated safety circuit 46 may send a signal to the safety controller 28 to interrupt power to the automation system 10 or components thereof (e.g., the machine/process 12) or put the automation system 10 or components thereof into a safe state based on the detected states of the E-stop 32 and the live-man switch 34.
- the integrated safety circuit 46 includes more than one processor that are be used make determinations of the states of the E-stop 32 and the live-man switch 34 as well as determinations of the signals send by the E-stop 32 and the live-man switch 34.
- a signal from the integrated safety circuit 46 may be sent to the safety controller 28 via the transmitter/receiver 48 and received by the transmitter/receiver 44 and safety controller 28, wherein the profile 36 may be executed to determine that the signal is indicative of a request to terminate or otherwise interrupt power to the automation system 10 or the machine/process 12 or to put the automation system 10 or the machine/process 12 into a safe state.
- the signal may be transmitted from the HMI 30 to the on-machine safety module 40 wirelessly or through a wired connection, such as via black-channel communication 50.
- Black-channel communication 50 refers to communication of the signals (e.g., signal to interrupt power to the automation system 10) as well as data associated with the automation system 10 that occurs via the same means.
- the black-channel communication 50 refers to a communication technique that does not include communication specific to sending safety information or signals, such as the signals to interrupt power to the automation system 10.
- black-channel communication 50 may include wireless communication (e.g., via a wireless network or Bluetooth), communication via an Ethernet cable (e.g., CAT 5e or CAT 6 cable), and/or communication via universal asynchronous receiver/transmitter (UART) communication.
- the automation system 10 may be operated with a safety controller (e.g., safety controller 28) that is located remotely on a machine/process 12 of the automation system 10, including embodiments of the on-machine safety-module 40 that do not include the safety I/O module 42.
- the safety controller 28 which may be located on the machine/process 12, may control the automation system 10 based on input received from the HMI 30. For instance, input from the HMI 30 may cause signals to be transmitted via black channel communication 50 to the safety controller 28 of the on-machine safety module 40, and the safety controller 28 may send a signal that causes a change to operating parameters of the automation system 10 (e.g., put the automation system 10 or components thereof into a safe state).
- input from the HMI 30 may cause signals to be transmitted via black channel communication 50 to the safety controller 28 of the on-machine safety module 40, and the safety controller 28 may send a signal that causes a change to operating parameters of the automation system 10 (e.g., put the automation system 10 or components thereof into a safe state).
- the signals from the integrated safety circuit 46 to the safety controller 28 include time-stamped encrypted packets. That is, the integrated safety circuit 46 and the safety controller 28 communicate with one another via time-stamped encrypted packets. Additionally, it should be noted that the time-stamped encrypted packets conform to International Electrotechnical Commission (IEC) standard 61508 and accord with the Common Industrial Protocol (CIP).
- IEC International Electrotechnical Commission
- CIP Common Industrial Protocol
- FIGS. 3-5 illustrate different embodiments in which the HMI 30 may communicate with the safety controller 28 and/or on-machine safety module 40 in the same manner or a manner similar to the manner discussed above in relation to FIG. 2 .
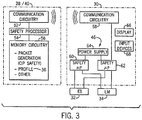
- FIG. 3 is a schematic diagram of an embodiment of the HMI 30 and the safety controller 28 or the on-machine safety module 40. More specifically, the safety controller 28/on-machine safety module 40 includes communication circuitry 52, a safety processor 54, and memory circuitry 56.
- the HMI 30 include communication circuitry 58, two safety microprocessors 60, 62, the E-stop 32, the live-man switch 34, a power supply 64, a display 66, and input devices 68.
- the safety microprocessors 60, 62 may work in conjunction to determine actuation of the E-stop 32 and live-man switch 34 by an operator. Using two safety microprocessors 60, 62 is one example of how to implement the integrated safety circuit 46 and perform the same functions as the integrated safety circuit 46 discussed above. For instance, one or both of the safety microprocessors 60,62 may determine that the E-stop 32 and/or live-man switch 34 has been actuated and send a signal to the safety controller 28/on-machine safety module 40 to interrupt power to the automation system 10 or components thereof.
- the safety microprocessors 60, 62 may receive a signal from the E-stop 32 or the live-man switch 34 indicating that the operator has actuated the E-stop 32 of the live-man switch 34 and send a signal to the safety controller 28/on-machine safety module 40 to interrupt the flow of electric power to the automation system 10 or the machine/process 12 or put the automation system 10 and/or components of the automation system 10 into a safe state.
- the safety microprocessors 60, 62 may also determine whether the signals generated by the E-stop 32 and the live-man switch 34 should be communicated to the safety controller 28/on-machine safety module 40.
- the HMI 30 may include less than two microprocessors (e.g., one microprocessor) or more than two microprocessors (e.g., three, four, five, or more microprocessors) in other embodiments to attain the desired safety integrity level.
- the communication circuitry 52, 58 enables communication between the HMI 30 and the safety controller 28/on-machine safety module 40.
- the communication occurs via time-stamped encrypted packets that conform to IEC standard 61508.
- the communication may occur wirelessly (e.g., via a wireless network), and the wireless communication may be black-channel communication (e.g., black-channel communication 50).
- an operator may actuate the E-stop 32 or the live-man switch 34, causing a signal to be sent to the safety microprocessors 60, 62.
- the safety microprocessors 60, 62 may send a signal that includes time-stamped encrypted packets via the communication circuitry 58 to the safety controller 28/on-machine safety module 40, which receives the signal via the communication circuitry 52.
- the signal may be processed by the safety processor 54.
- the safety processor 54 may execute instructions stored on the memory circuitry 56 such as the profile 36.
- the profile 36 may include instructions that, when executed, enable the safety processor 54 of the safety controller 28/on-machine safety module 40 to recognize the safety microprocessors 60, 62 as well as the signals generated by the safety microprocessors 60, 62.
- the profile 36 may enable the safety processor 54 to recognize a signal from the safety microprocessors 60, 62 as being indicative of a request or command to stop or interrupt the flow of electric power to the automation system 10 and/or components of the automation system 10 (e.g., machine/process 12) or put the automation system 10 or components thereof into a safe state.
- the power supply 64 supplies power to the safety microprocessors 60, 62. While the illustrated embodiment includes one power supply 64, it should be noted that other embodiments may include more than one power supply 64. For example, the microprocessors 60, 62 may be powered by separate, cross-monitored power supplies 64.
- the display 66 displays information concerning the automation system 10 and/or components of the automation system 10 to the operator. Additionally, the illustrated embodiment of the HMI 30 includes input devices 68 that the operator may use to make inputs into the HMI 30. In certain embodiments, such as embodiments in which the HMI 30 is a thin client or ultra-thin client or the screen 66 is a touchscreen, the screen 66 may function as an input device 68.
- the memory circuitry 56 may also include instructions that enable the time-stamped encrypted packets to be generated. For instance, the instructions may be executed by the safety processor 54 such that the time-stamped encrypted packets are generated, and the time-stamped encrypted packets may be used for communication between the safety controller 28/on-machine safety module 40 and the HMI 30.
- the memory circuitry 56 may also include other data or instructions. For instance, the memory circuitry 56 may include data related to the operational history of the automation system 10 and/or the safety controller 28/on-machine safety module 40.
- FIG. 4 is a schematic diagram of another embodiment of the on-machine safety module 40 and an HMI 72.
- the HMI 72 is an ultra-thin client that includes the E-stop 32 and the live-man switch 34.
- FIG. 5 is a schematic diagram of yet another embodiment of the on-machine safety module 40 and an HMI 78.
- the HMI 78 is an on-machine HMI that is supported via a support 76 by the same machine of the automation system 10 as the on-machine safety module 40.
- the on-machine safety module 40 may include the safety controller 28. Accordingly, the HMI 78 may be supported on the same machine as the safety controller 28.
- the HMI 72 and HMI 78 may include any of the components discussed above with regard to the embodiments of HMI 30 of FIG. 2 and FIG. 3 . Additionally, the HMI 72 and HMI 78 may communicate via a wired connection (e.g., a wire 70).
- the wired connection 70 allows for black channel communication (e.g., black channel communication 50) as discussed above.
- a power supply 74 is included. The power supply 74 supplies power to the on-machine safety module 40 and/or the HMI.
- HMIs 30, 72, 78, E-stop 32, and the live-man switch 34 While the embodiments discussed in the present disclosure include HMIs 30, 72, 78, E-stop 32, and the live-man switch 34, it should be noted that other safety input devices may be included and used in the automation system 10 to cause interruptions to power of the automation system 10 and/or components thereof (e.g., machine/process 12) or cause the automation system 10 or the machine/process 12 to enter into a safe state.
- the automation system 10 may also include jog buttons, rotary controls, key switches, joysticks, alphanumeric keys, and the like.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Safety Devices In Control Systems (AREA)
Abstract
Description
- The invention relates generally to the field of automation systems. More specifically, the present application relates to safety input devices for automation systems.
- Many automation systems utilize safety input devices. For example, the safety input devices may be used as part of a safety control system within an automation system. For mobile devices that include safety input devices, discrete tether wiring is typically used to connect the safety input devices to a safety control system via a local safety input/output (I/O) module and/or a local safety controller. Additionally, on-machine safety input devices typically have a wired connection to a local safety I/O module and/or a local safety controller. That is, safety input devices generally call for a safety controller, and/or a safety I/O module dedicated to the safety input devices in order to function. Therefore, it may be desirable to allow for safety input devices to function without using wiring, a dedicated safety controller, and/or safety I/O modules.
- In a first embodiment, a system includes a safety controller that, in operation, interrupts power to industrial automation devices or puts the system into a safe state upon command of a human operator. The system also includes an emergency stop switch circuit actuatable by a human operator and a human machine interface in data communication with the safety controller and the emergency stop switch circuit. The human machine interface includes integrated safety circuitry that, in operation, detects a change of state of the emergency stop switch circuit and provides a signal to the safety controller to interrupt power to the industrial automation devices or put the system into a safe state.
- In another embodiment, a system includes a human machine interface that, in operation, is in data communication with a safety controller and to an emergency stop switch circuit. The human machine interface includes integrated safety circuitry that, in operation, detects a change of state of the emergency stop switch circuit and provides a signal to the safety controller to interrupt power to the industrial automation devices or put the industrial automation devices into a safe state.
- In yet another embodiment, a method includes receiving, in integrated safety circuitry of a human machine interface, a stop signal from an emergency stop circuit actuated by a human operator. The method also includes communicating a safety signal from the integrated safety circuitry to a safety controller of an automation system based upon the received stop signal and interrupting power to automation devices or putting the automation system into a safe state via the safety controller based upon the safety signal.
- These and other features, aspects, and advantages of the present invention will become better understood when the following detailed description is read with reference to the accompanying drawings in which like characters represent like parts throughout the drawings, wherein:
-
FIG. 1 is a schematic diagram of an automation system, in accordance with embodiments described herein; -
FIG. 2 is a schematic diagram of an on-machine safety module and a human-machine interface that may be included in the automation system ofFIG. 1 , in accordance with embodiments described herein; -
FIG. 3 is a schematic diagram of a human-machine interface and a safety controller or on-machine safety module, in accordance with embodiments described herein; -
FIG. 4 is a schematic diagram of a portion of a human-machine interface and a safety controller or on-machine safety module, in accordance with embodiments described herein; and -
FIG. 5 is a schematic diagram of a human-machine interface and a safety controller or on-machine safety module, in accordance with embodiments described herein. - One or more specific embodiments of the present invention will be described below. In an effort to provide a concise description of these embodiments, all features of an actual implementation may not be described in the specification. It should be appreciated that in the development of any such actual implementation, as in any engineering or design project, numerous implementation-specific decisions must be made to achieve the developers' specific goals, such as compliance with system-related and business-related constraints, which may vary from one implementation to another. Moreover, it should be appreciated that such a development effort might be complex and time consuming, but would nevertheless be a routine undertaking of design, fabrication, and manufacture for those of ordinary skill having the benefit of this disclosure.
- When introducing elements of various embodiments of the present disclosure, the articles "a," "an," "the," and "said" are intended to mean that there are one or more of the elements. The terms "comprising," "including," and "having" are intended to be inclusive and mean that there may be additional elements other than the listed elements.
- Automation systems often utilize safety input devices such as human-machine interfaces. For example, the safety input devices may be used as part of a safety control system within an automation system that is used to alter operation of the automation system. For mobile devices (e.g., tablets) that include safety input devices, discrete tether wiring is typically used to connect the safety input devices to a safety control system via a local safety input/output (I/O) module and/or a local safety controller. Additionally, on-machine safety input devices typically have a dedicated wired connection to a local safety I/O module and/or a local safety controller. That is, safety input devices generally call for a safety controller, and/or a safety I/O module in order to function. The presently disclosed techniques allow for safety input devices to be connected to automation systems without using dedicated discrete wiring to the safety input device. Moreover the techniques disclosed herein allow for safety input devices to be connected to automation system without a local safety I/O module or a local safety controller. In other words, the presently disclosed techniques enable the elimination of the discrete wiring, safety I/O module, and safety controller that are specifically dedicated to safety input devices.
- By way of introduction,
FIG. 1 is a schematic diagram of anautomation system 10. Theautomation system 10 allows for control and/or monitoring of a machine/process 12. The machine/process 12 may take many forms and include devices for accomplishing many different and varied purposes. For example, the machine/process 12 may include a manufacturing line or station, a material handling system, an assembly process, a compressor station, an oil refinery, a batch operation for making food items, or any mechanized and automated system. Accordingly, the machine/process 12 may include a variety of operational components, such as electric motors, motor drives and controllers, sensors and instrumentation, actuators, feedback devices, automation controllers, computers, and so forth. In particular, the machine/process 12 will typically include control and monitoring equipment for regulating process variables through automation and/or monitoring. - For example, the illustrated machine/
process 12 hasactuators 14 andsensors 16. Theactuators 14 include one or more devices adapted to perform a mechanical action in response to a signal from anautomation controller 18, such as motors and associated drives. Thesensors 16 include one or more devices that provide information regarding the operation and/or conditions of the machine/process 12 to theautomation controller 18, such as for monitoring, open and closed-loop control, and so forth. Thesensors 16 andactuators 14 serve to allow automation of the machine/process 12 in accordance with programming or protocols implemented by theautomation controller 18. Indeed, thesensors 16 andactuators 14 may be utilized within any number of preset process loops that are monitored and controlled by theautomation controller 18 or any other control and/or monitoring equipment located locally to the system or remotely (e.g., enterprise systems, remote monitoring systems, etc.). Such process loops may be activated based on process inputs (e.g., input from one of the sensors 16) or direct operator input (e.g., input received via a human-machine interface associated with the automation controller 18). It should additionally be noted that theautomation system 10 may include more than oneautomation controller 18, and these may operate independently or inter-dependently in accordance with the nature and operation of the system/process. - Components of the
automation system 10 such as the machine/process 12,actuators 14,sensors 16, andautomation controller 18 may be coupled to and/or in communication with apower network 20 and adata network 22. Thepower network 20 supplies electric power (e.g., three-phase alternating current electric power) to theautomation system 10 and various components of theautomation system 10. Thedata network 22 may be used to send and receive data. For example, data from thesensors 16 is relayed to theautomation controller 18, and commands from theautomation controller 18 are sent to theactuators 14 via thedata network 22. Additionally, thedata network 22 may be a wireless network. - Other systems may be used to monitor and/or control that
automation system 10 and components thereof (e.g., the machine/process 12). For instance, a remote control/monitoring system 24 receives data regarding theautomation system 10 via thedata network 22 and control the machine/process 12 based on the received data. More specifically, the remote control/monitoring system 24 can send commands that change operational parameters of theactuators 16 of the machine/process 12. - The remote control/
monitoring system 24 may also be communicatively coupled to anenterprise network 26. Theenterprise network 26 may include other machines and/or processes, groupings of machines and/or processes, and/or networks of automation machines and/or automated devices. Theenterprise network 26 may also include a data network that is used to transmit data regarding with theautomation system 10 to other systems with which theautomation system 10 may be associated. For instance, theautomation system 10 may be part of a larger system or process, and theenterprise network 26 may be used to transmit data throughout the larger system or process. Data from the other systems and/or the larger system may also be received by theenterprise network 26. Similar to thedata network 22, theenterprise network 26 may include a wireless network. - The
automation system 10, as illustrated, also includes one ormore safety controllers 28. Thesafety controller 28, which is coupled to thepower network 20 anddata network 22, monitors data associated with theautomation system 10 as well as the components of the automation system 10 (e.g., machine/process 12). Moreover, thesafety controller 28 may effect changes based on the received data. For example, in response to signals indicative of certain conditions such as signals generated by operator input, thesafety controller 28 may interrupt the flow of electric power to the machine/process 12 and/or put theautomation system 10 or components thereof into a safe state. Additionally, as discussed below, thesafety controller 28 can also change operational characteristics of theautomation system 10 based on operator input. Furthermore, thesafety controller 28 may be remotely located on the machine/process 12. - As shown, the
safety controller 28 is communicatively coupled to a human-machine interface (HMI) 30 that displays information to an operator as well as receives operator input. More specifically, theHMI 30 may send and receive data to and from thesafety controller 28 via thedata network 22. For instance, in this embodiment, the HMI includes emergency stop circuitry such as an emergency stop (E-stop) 32 (e.g., a push-button) and/or a live-man switch 34, which, depending on the embodiment, may also be known as a three-position enable switch or a grip switch. The E-stop 32 and live-man switch 34 can be utilized by an operator to provide input, such as input indicative of a request to shut down the machine/process 12 and/or theautomation system 10. For instance, in embodiments in which the E-stop 32 is a push-button, the operator may press (or in some embodiments, pull) the push-button, thesafety controller 28 may determine that the pressing of the push-button is indicative of a request to shut down theautomation system 10, and thesafety controller 28 may cause theautomation system 10 to shut down (e.g., via interrupting the now of power to automation system 10). - As discussed below, in some embodiments, the
HMI 30 may be a wireless device that communicates with thesafety controller 28 wirelessly, while in other embodiments, theHMI 30 may be a wired device that communicates with thesafety controller 28 via a wired connection. In embodiments in which theHMI 30 is wired, it should be noted that theHMI 30 is wired to thesafety controller 28 without using a wire dedicated to the transmission of safety data and/or signals. As will also be discussed below, theHMI 30 may also include circuitry that recognizes operator input as being indicative of a request to interrupt the operation of theautomation system 10 and send a signal to thesafety controller 28 to interrupt power to theautomation system 10 and/or components thereof (e.g., the machine/process 12) or put theautomation system 10 into a safe state. - As illustrated, the
safety controller 28 also includes aprofile 36. Theprofile 36 may be software or instructions that are be stored on memory circuitry included within and/or accessible by thesafety controller 28 and executed by a processor associated with thesafety controller 28. More specifically, theprofile 36 allows for signals from theHMI 30 to be interpreted and/or implemented by thesafety controller 28. For example, theprofile 36 enables recognition of the circuitry associated with theHMI 30 and allows for signals from theHMI 30 to interrupt the flow of power to theautomation system 10 or put theautomation system 10 into a safe state. More specifically, theprofile 36 may enable recognition of signals that are sent from theHMI 30 as a result of an operator input via the E-stop 32 and/or the live-man switch 34. For example, theprofile 36, when executed by thesafety controller 28, enables thesafety controller 28 to determine that the signal is indicative of a request to interrupt power to theautomation system 10 or put theautomation system 10 into a safe state as well as to permit thesafety controller 28 to cause an interruption to the power to theautomation system 10 and/or components of theautomation system 10 or put theautomation system 10 into a safe state. For instance, thesafety controller 28 may send a signal that causes power from thepower network 20 to not reach the machine/process (e.g., break a circuit). - The
automation network 10 also includes E-stops 38 that are not included in theHMI 30. As illustrated, the E-stops 38 may be push-buttons. When used, the E-stops 38 cause power to theautomation system 10 and/or components of theautomation system 10 such as the machine/process 12 to be interrupted or cause theautomation system 10 or components thereof to be put into a safe state. For example, when an operator utilizes an E-stop 38, the E-stop could cause an interruption to thepower network 20. Use of the E-stops 38 may also cause a signal to be sent via thedata network 22 to theautomation controller 18 or thesafety controller 28, and in response, theautomation controller 18 and/orsafety controller 28 may change the operating parameters of the machine/process 12 orautomation system 10 to put theautomation system 10 or components of theautomation system 10 into a safe state. - Continuing with the drawings,
FIG. 2 is a schematic diagram of an on-machine safety module 40 andHMI 30 that may be included in an automation system, such as theautomation system 10. The on-machine safety module 40 may be located on the machine/process 12. As discussed below, theHMI 30 communicates with components of thesafety module 40 without using a communication means that is dedicated to communicating safety information and/or signals to and from theHMI 30. In other words, the techniques described in the illustrated embodiment may be used to remove independent communication means (e.g., a discrete cable) typically used to transmit data from a safety input device such as an HMI to the machine associated with the HMI. - As illustrated, the on-
machine safety module 40 includes several components. For instance, the on-machine safety module 40 includes an optional safety I/O module 42, a transmitter/receiver 44, and asafety controller 28. The transmitter/receiver 44 may be a microprocessor that is configured to transmit and/or receive data from theHMI 30, and the transmitter/receiver 44 may be integrated into thesafety controller 28. The transmitter/receiver function is discussed in greater detail below. - The
safety controller 36 receives data from the transmitter/receiver 44. Additionally,actuators 14 andsensors 16 may be communicatively coupled to a safety I/O module 42, and thesafety controller 28 may send and receive data to and from theactuators 14 andsensors 16 via the safety I/O module 42. However, while communication between components of theautomation 10 and thesafety controller 28 may be conducted via the I/O module 42, it should be noted that such a technique is strictly optional. For instance, in some embodiments, the transmitter/receiver 44 may be included within thesafety controller 36 and receive and transmit data to and from components of theautomation system 10. Accordingly, the safety I/O module 42 is not specifically needed to communicate with theHMI 30. - As described above, the
safety controller 28 may receive and monitor data related to an automation system (e.g., automation system 10) and/or components or devices thereof. As described below, thesafety controller 28 may interrupt power to the components and devices of theautomation system 10 or put theautomation system 10 into a safe state based on operator input (e.g., operator input made via the HMI 30). - The
HMI 30 also includes several components. As illustrated, theHMI 30 includes anintegrated safety circuit 46 that is communicatively coupled to an E-stop 32, a live-man switch 34, and a transmitter/receiver 48. Theintegrated safety circuit 46 detects changes regarding the E-stop 32 and the live-man switch 34 and sends signals to thesafety controller 28 based on the changes. More specifically, theintegrated safety circuit 46 may detect a change in a state of the E-stop 32 and/or the live-man switch 34 and/or receive a signal from the E-stop 32 and/or the live-man switch 34 and provide a signal to thesafety controller 28 to interrupt power to the machine/process 12 and/or other machines, processes, and/or devices associated with theautomation system 10 based on the detected change. - Referring specifically to the emergency stop circuitry that is included in the
HMI 30, the E-stop 32 and the live-man switch 34 may each include circuitry that enable the E-stop 32 and live-man switch 34 to cause electric power (e.g., power provided by the power network 20) to be interrupted to theautomation system 10 and/or the machine-process 12. For instance, the E-stop 32 and the live-man switch 34 may include circuitry, such as switches (e.g., contact switches), that when actuated cause a signal (e.g., electrical signal) to be sent to theintegrated safety circuit 46. As a more specific example, the live-man switch 34 may include contacts with default states. That is, some contacts that are normally open ("NO") and other contacts that are normally closed ("NC"). An operator may actuate the live-man switch 34 (i.e., cause a change in state of one or more of the contacts from a default state (e.g., change a normally open contact to a closed position)), which causes the machine/process 12 to operate and/or receive electrical power. - In the illustrated embodiment, the live-
man switch 34 is a three position enabling device, which means the live-man has three positions. For example, the live-man switch 34 may be a device that has a grip or trigger switch with three positions, and each of the positions may correspond to a state of the contacts in the circuitry of the live-man switch 34. For instance, a default state of live-man (e.g., no power to machine/process 12) may exist at the first and third positions. The first state may correspond to when the grip or trigger switch has no pressure applied to it by the operator. A second position may correspond to when the operator grips the grip or trigger switch, which may cause a change in state of the circuitry of the live-man switch 34 (e.g., cause some of the contacts to open or close). The third state may correspond to when the operators grips the grip or trigger switch with a certain amount of pressure that is greater than that applied to cause the second state to occur. As another example, the E-stop 32 may include one or more contacts that are normally open. An operator may press, pull, or otherwise actuate the E-stop 32 to cause the contacts to close (e.g., complete a circuit). - In any case, each state of the E-stop 32 or the live-
man switch 34 may cause various signals to be sent to theintegrated safety circuit 46, and at least one state of each the E-stop 32 and the live-man switch 34 causes a signal to be sent to theintegrated safety circuit 46 that corresponds to operator input (e.g., actuation of the E-stop 32 or live-man switch 34) associated with a request to interrupt power to theautomation system 10 and/or the machine/process 12. For instance, when an operator actuates the push-button 32, a signal may be sent to theintegrated safety circuit 46, which may send a signal to thesafety controller 28 to interrupt power to the machine/process 12 orautomation system 10 or put the machine/process 12 orautomation system 10 into a safe state. Moreover, theintegrated safety circuit 46 may also detect the states of the E-stop 32 and the live-man switch 34 based on the signals received from the E-stop 32 and the live-man switch 34. Theintegrated safety circuit 46 may send a signal to thesafety controller 28 to interrupt power to theautomation system 10 or components thereof (e.g., the machine/process 12) or put theautomation system 10 or components thereof into a safe state based on the detected states of the E-stop 32 and the live-man switch 34. Additionally, as discussed below, in certain embodiments, theintegrated safety circuit 46 includes more than one processor that are be used make determinations of the states of the E-stop 32 and the live-man switch 34 as well as determinations of the signals send by the E-stop 32 and the live-man switch 34. - More specifically, a signal from the
integrated safety circuit 46 may be sent to thesafety controller 28 via the transmitter/receiver 48 and received by the transmitter/receiver 44 andsafety controller 28, wherein theprofile 36 may be executed to determine that the signal is indicative of a request to terminate or otherwise interrupt power to theautomation system 10 or the machine/process 12 or to put theautomation system 10 or the machine/process 12 into a safe state. More specifically, the signal may be transmitted from theHMI 30 to the on-machine safety module 40 wirelessly or through a wired connection, such as via black-channel communication 50. Black-channel communication 50 refers to communication of the signals (e.g., signal to interrupt power to the automation system 10) as well as data associated with theautomation system 10 that occurs via the same means. In other words, the black-channel communication 50 refers to a communication technique that does not include communication specific to sending safety information or signals, such as the signals to interrupt power to theautomation system 10. For example, black-channel communication 50 may include wireless communication (e.g., via a wireless network or Bluetooth), communication via an Ethernet cable (e.g., CAT 5e or CAT 6 cable), and/or communication via universal asynchronous receiver/transmitter (UART) communication. As such, theautomation system 10 may be operated with a safety controller (e.g., safety controller 28) that is located remotely on a machine/process 12 of theautomation system 10, including embodiments of the on-machine safety-module 40 that do not include the safety I/O module 42. In other words, thesafety controller 28, which may be located on the machine/process 12, may control theautomation system 10 based on input received from theHMI 30. For instance, input from theHMI 30 may cause signals to be transmitted viablack channel communication 50 to thesafety controller 28 of the on-machine safety module 40, and thesafety controller 28 may send a signal that causes a change to operating parameters of the automation system 10 (e.g., put theautomation system 10 or components thereof into a safe state). - Furthermore, the signals from the
integrated safety circuit 46 to thesafety controller 28 include time-stamped encrypted packets. That is, theintegrated safety circuit 46 and thesafety controller 28 communicate with one another via time-stamped encrypted packets. Additionally, it should be noted that the time-stamped encrypted packets conform to International Electrotechnical Commission (IEC) standard 61508 and accord with the Common Industrial Protocol (CIP). -
FIGS. 3-5 illustrate different embodiments in which theHMI 30 may communicate with thesafety controller 28 and/or on-machine safety module 40 in the same manner or a manner similar to the manner discussed above in relation toFIG. 2 .FIG. 3 is a schematic diagram of an embodiment of theHMI 30 and thesafety controller 28 or the on-machine safety module 40. More specifically, thesafety controller 28/on-machine safety module 40 includescommunication circuitry 52, asafety processor 54, andmemory circuitry 56. TheHMI 30 includecommunication circuitry 58, twosafety microprocessors 60, 62, the E-stop 32, the live-man switch 34, apower supply 64, adisplay 66, andinput devices 68. - First focusing on the
HMI 30, thesafety microprocessors 60, 62 may work in conjunction to determine actuation of the E-stop 32 and live-man switch 34 by an operator. Using twosafety microprocessors 60, 62 is one example of how to implement theintegrated safety circuit 46 and perform the same functions as theintegrated safety circuit 46 discussed above. For instance, one or both of thesafety microprocessors 60,62 may determine that the E-stop 32 and/or live-man switch 34 has been actuated and send a signal to thesafety controller 28/on-machine safety module 40 to interrupt power to theautomation system 10 or components thereof. Moreover, thesafety microprocessors 60, 62 may receive a signal from the E-stop 32 or the live-man switch 34 indicating that the operator has actuated the E-stop 32 of the live-man switch 34 and send a signal to thesafety controller 28/on-machine safety module 40 to interrupt the flow of electric power to theautomation system 10 or the machine/process 12 or put theautomation system 10 and/or components of theautomation system 10 into a safe state. Thesafety microprocessors 60, 62 may also determine whether the signals generated by the E-stop 32 and the live-man switch 34 should be communicated to thesafety controller 28/on-machine safety module 40. It should also be noted that while the illustrated embodiment includes twosafety microprocessors 60, 62, theHMI 30 may include less than two microprocessors (e.g., one microprocessor) or more than two microprocessors (e.g., three, four, five, or more microprocessors) in other embodiments to attain the desired safety integrity level. - The
communication circuitry HMI 30 and thesafety controller 28/on-machine safety module 40. The communication occurs via time-stamped encrypted packets that conform to IEC standard 61508. The communication may occur wirelessly (e.g., via a wireless network), and the wireless communication may be black-channel communication (e.g., black-channel communication 50). For instance, an operator may actuate the E-stop 32 or the live-man switch 34, causing a signal to be sent to thesafety microprocessors 60, 62. Thesafety microprocessors 60, 62 may send a signal that includes time-stamped encrypted packets via thecommunication circuitry 58 to thesafety controller 28/on-machine safety module 40, which receives the signal via thecommunication circuitry 52. The signal may be processed by thesafety processor 54. For instance, thesafety processor 54 may execute instructions stored on thememory circuitry 56 such as theprofile 36. Theprofile 36 may include instructions that, when executed, enable thesafety processor 54 of thesafety controller 28/on-machine safety module 40 to recognize thesafety microprocessors 60, 62 as well as the signals generated by thesafety microprocessors 60, 62. For instance, theprofile 36 may enable thesafety processor 54 to recognize a signal from thesafety microprocessors 60, 62 as being indicative of a request or command to stop or interrupt the flow of electric power to theautomation system 10 and/or components of the automation system 10 (e.g., machine/process 12) or put theautomation system 10 or components thereof into a safe state. - The
power supply 64 supplies power to thesafety microprocessors 60, 62. While the illustrated embodiment includes onepower supply 64, it should be noted that other embodiments may include more than onepower supply 64. For example, themicroprocessors 60, 62 may be powered by separate, cross-monitored power supplies 64. Thedisplay 66 displays information concerning theautomation system 10 and/or components of theautomation system 10 to the operator. Additionally, the illustrated embodiment of theHMI 30 includesinput devices 68 that the operator may use to make inputs into theHMI 30. In certain embodiments, such as embodiments in which theHMI 30 is a thin client or ultra-thin client or thescreen 66 is a touchscreen, thescreen 66 may function as aninput device 68. - In addition to the
profile 36, thememory circuitry 56 may also include instructions that enable the time-stamped encrypted packets to be generated. For instance, the instructions may be executed by thesafety processor 54 such that the time-stamped encrypted packets are generated, and the time-stamped encrypted packets may be used for communication between thesafety controller 28/on-machine safety module 40 and theHMI 30. Thememory circuitry 56 may also include other data or instructions. For instance, thememory circuitry 56 may include data related to the operational history of theautomation system 10 and/or thesafety controller 28/on-machine safety module 40. -
FIG. 4 is a schematic diagram of another embodiment of the on-machine safety module 40 and anHMI 72. TheHMI 72 is an ultra-thin client that includes the E-stop 32 and the live-man switch 34.FIG. 5 is a schematic diagram of yet another embodiment of the on-machine safety module 40 and anHMI 78. TheHMI 78 is an on-machine HMI that is supported via asupport 76 by the same machine of theautomation system 10 as the on-machine safety module 40. As discussed above, the on-machine safety module 40 may include thesafety controller 28. Accordingly, theHMI 78 may be supported on the same machine as thesafety controller 28. - While illustrated as including the E-stop 32 and the live-
man switch 34, theHMI 72 andHMI 78 may include any of the components discussed above with regard to the embodiments ofHMI 30 ofFIG. 2 andFIG. 3 . Additionally, theHMI 72 andHMI 78 may communicate via a wired connection (e.g., a wire 70). Thewired connection 70 allows for black channel communication (e.g., black channel communication 50) as discussed above. Referring specifically toFIG. 4 , it should also be noted that apower supply 74 is included. Thepower supply 74 supplies power to the on-machine safety module 40 and/or the HMI. - While the embodiments discussed in the present disclosure include
HMIs E-stop 32, and the live-man switch 34, it should be noted that other safety input devices may be included and used in theautomation system 10 to cause interruptions to power of theautomation system 10 and/or components thereof (e.g., machine/process 12) or cause theautomation system 10 or the machine/process 12 to enter into a safe state. For instance theautomation system 10 may also include jog buttons, rotary controls, key switches, joysticks, alphanumeric keys, and the like. - While only certain features of the invention have been illustrated and described herein, many modifications and changes will occur to those skilled in the art. It is, therefore, to be understood that the appended claims arc intended to cover all such modifications and changes as fall within the true spirit of the invention.
- The following is a list of further preferred embodiments of the invention:
- 1. A system comprising:
- a safety controller that, in operation, interrupts power to industrial automation devices or puts the system into a safe state upon command of a human operator;
- an emergency stop switch circuit actuatable by a human operator; and
- a human machine interface in data communication with the safety controller and the emergency stop switch circuit, and comprising integrated safety circuitry that, in operation, detects a change of state of the emergency stop switch circuit and provides a signal to the safety controller to interrupt power to the industrial automation devices or put the system into a safe state.
- 2. The system of embodiment 1, wherein the safety controller comprises memory circuitry storing a profile for the integrated safety circuitry and, in operation, recognizes the integrated safety circuitry to permit interruption of power to the industrial automation devices or put the system into a safe state.
- 3. The system of embodiment 1, further comprising a live-man switch circuit coupled to the integrated safety circuitry, wherein the integrated safety circuitry, in operation, provides a signal to the safety controller to interrupt power to the industrial automation devices or put the system into a safe state based upon a signal from either the emergency stop switch circuit or from the live-man switch circuit.
- 4. The system of embodiment 1, wherein the human machine interface comprises a wireless device that, in operation, communicates with the safety controller wirelessly.
- 5. The system of embodiment 1, wherein the human machine interface comprises a wired device that, in operation, communicates with the safety controller via a wired connection.
- 6. The system of embodiment 1, wherein the human machine interface comprises an on-machine monitor supported by a machine that also supports the safety controller.
- 7. The system of embodiment 1, wherein the safety controller and the integrated safety circuitry communicate via time-stamped encrypted packets.
- 8. The system of embodiment 7, wherein the time-stamped encrypted packets conform to International Electrotechnical Commission standard 61508.
- 9. The system of embodiment 1, wherein the integrated safety circuitry comprises one or more data processors that, in operation, determine actuation of the emergency switch circuit
- 10. A system comprising:
a human machine interface that, in operation, is in data communication with a safety controller and to an emergency stop switch circuit, the human machine interface comprising integrated safety circuitry that, in operation, detects a change of state of the emergency stop switch circuit and provides a signal to the safety controller to interrupt power to the industrial automation devices or put the industrial automation devices into a safe state. - 11. The system of
embodiment 10, wherein the human machine interface comprises a wireless device that, in operation, communicates with the safety controller wirelessly. - 12. The system of
embodiment 10, wherein the human machine interface comprises a wired device that, in operation, communicates with the safety controller via a wired connection. - 13. The system of
embodiment 10, wherein the human machine interface comprises an on-machine monitor supported by a machine that also supports the safety controller. - 14. The system of
embodiment 10, wherein the safety controller and the integrated safety circuitry communicate via time-stamped encrypted packets. - 15. The system of
embodiment 10, wherein the integrated safety circuitry comprises one or more data processors that, in operation, determine actuation of the emergency switch circuit. - 16. A method comprising:
- receiving, in integrated safety circuitry of a human machine interface, a stop signal from an emergency stop circuit actuated by a human operator;
- communicating a safety signal from the integrated safety circuitry to a safety controller of an automation system based upon the received stop signal; and
- interrupting power to automation devices or putting the automation system into a safe state via the safety controller based upon the safety signal.
- 17. The method of
embodiment 16, comprising processing the stop signal via a plurality of processing circuits of the integrated safety circuitry to determine whether to communicate the safety signal to the safety controller. - 18. The method of
embodiment 16, wherein the safety signal is communicated from the integrated safety circuitry to the safety controller via time-stamped encrypted packets. - 19. The method of
embodiment 16, wherein the human machine interface comprises a wireless device that, in operation, communicates with the safety controller wirelessly. - 20. The method of
embodiment 16, wherein the human machine interface comprises a wired device that, in operation, communicates with the safety controller via a wired connection.
Claims (15)
- A system comprising:a safety controller that, in operation, interrupts power to industrial automation devices or puts the system into a safe state upon command of a human operator;an emergency stop switch circuit actuatable by a human operator; anda human machine interface in data communication with the safety controller and the emergency stop switch circuit, and comprising integrated safety circuitry that, in operation, detects a change of state of the emergency stop switch circuit and provides a signal to the safety controller to interrupt power to the industrial automation devices or put the system into a safe state.
- The system of claim 1, wherein the safety controller comprises memory circuitry storing a profile for the integrated safety circuitry and, in operation, recognizes the integrated safety circuitry to permit interruption of power to the industrial automation devices or put the system into a safe state.
- The system of claim 1 or 2, further comprising a live-man switch circuit coupled to the integrated safety circuitry, wherein the integrated safety circuitry, in operation, provides a signal to the safety controller to interrupt power to the industrial automation devices or put the system into a safe state based upon a signal from either the emergency stop switch circuit or from the live-man switch circuit.
- The system of one of claims 1 to 3, wherein the human machine interface comprises a wireless device that, in operation, communicates with the safety controller wirelessly; or
wherein the human machine interface comprises a wired device that, in operation, communicates with the safety controller via a wired connection; or
wherein the human machine interface comprises an on-machine monitor supported by a machine that also supports the safety controller. - The system of one of claims 1 to 4, wherein the safety controller and the integrated safety circuitry communicate via time-stamped encrypted packets.
- The system of claim 5, wherein the time-stamped encrypted packets conform to International Electrotechnical Commission standard 61508.
- The system of one of claims 1 to 6, wherein the integrated safety circuitry comprises one or more data processors that, in operation, determine actuation of the emergency switch circuit.
- A system comprising:
a human machine interface that, in operation, is in data communication with a safety controller and to an emergency stop switch circuit, the human machine interface comprising integrated safety circuitry that, in operation, detects a change of state of the emergency stop switch circuit and provides a signal to the safety controller to interrupt power to the industrial automation devices or put the industrial automation devices into a safe state. - The system of claim 8, wherein the human machine interface comprises a wireless device that, in operation, communicates with the safety controller wirelessly.
- The system of claim 8, wherein the human machine interface comprises a wired device that, in operation, communicates with the safety controller via a wired connection; or wherein the human machine interface comprises an on-machine monitor supported by a machine that also supports the safety controller.
- The system of one of claims 8 to 10, wherein the safety controller and the integrated safety circuitry communicate via time-stamped encrypted packets.
- The system of one of claims 8 to 11, wherein the integrated safety circuitry comprises one or more data processors that, in operation, determine actuation of the emergency switch circuit.
- A method comprising:receiving, in integrated safety circuitry of a human machine interface, a stop signal from an emergency stop circuit actuated by a human operator;communicating a safety signal from the integrated safety circuitry to a safety controller of an automation system based upon the received stop signal; andinterrupting power to automation devices or putting the automation system into a safe state via the safety controller based upon the safety signal.
- The method of claim 13, comprising processing the stop signal via a plurality of processing circuits of the integrated safety circuitry to determine whether to communicate the safety signal to the safety controller.
- The method of claim 13 or 14, wherein the safety signal is communicated from the integrated safety circuitry to the safety controller via time-stamped encrypted packets; or wherein the human machine interface comprises a wireless device that, in operation, communicates with the safety controller wirelessly; or
wherein the human machine interface comprises a wired device that, in operation, communicates with the safety controller via a wired connection.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/627,066 US10338557B2 (en) | 2017-06-19 | 2017-06-19 | Systems and methods for safety input devices |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP3418825A1 true EP3418825A1 (en) | 2018-12-26 |
Family
ID=62067528
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP18169580.0A Ceased EP3418825A1 (en) | 2017-06-19 | 2018-04-26 | Systems and methods for safety input devices |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10338557B2 (en) |
| EP (1) | EP3418825A1 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3719595A1 (en) * | 2019-04-05 | 2020-10-07 | Graf-Syteco GmbH & Co. KG | Operation of a technical system |
| WO2021249757A1 (en) * | 2020-06-08 | 2021-12-16 | Kuka Deutschland Gmbh | Safety control system and method for executing a safety function |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6619000B2 (en) * | 2015-06-23 | 2019-12-11 | 株式会社Fuji | Power unit for work unit |
| DE102016222940B4 (en) * | 2016-11-21 | 2024-07-25 | Festo Se & Co. Kg | Safety module for an automation system, automation system and method for operating a safety module in an automation system |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1405700A2 (en) * | 2002-10-04 | 2004-04-07 | COMAU S.p.A. | Portable terminal for controlling, programming and/or teaching robots or similar automatic apparatuses |
| JP2005339890A (en) * | 2004-05-25 | 2005-12-08 | Idec Izumi Corp | Safety switch device |
| EP1716982A1 (en) * | 2005-04-19 | 2006-11-02 | COMAU S.p.A. | Process for controlling industrial robots, and related robots, robot systems and computer programs |
| US20160136814A1 (en) * | 2014-11-18 | 2016-05-19 | Staubli Faverges | Method for disconnecting a manual control unit from a multi-axis robot and robot for implementing such a method |
| US20160203282A1 (en) * | 2013-08-16 | 2016-07-14 | Intuitive Surgical Operations, Inc. | System and method for coordinated motion among heterogeneous devices |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58217294A (en) * | 1982-06-07 | 1983-12-17 | 株式会社日立製作所 | Safety apparatus of industrial robot |
| US6615091B1 (en) * | 1998-06-26 | 2003-09-02 | Eveready Battery Company, Inc. | Control system and method therefor |
| DE10119791B4 (en) * | 2001-04-23 | 2006-11-02 | Siemens Ag | Microprocessor-controlled field device for connection to a fieldbus system |
| US6894617B2 (en) * | 2002-05-04 | 2005-05-17 | Richman Technology Corporation | Human guard enhancing multiple site integrated security system |
| US9009084B2 (en) * | 2002-10-21 | 2015-04-14 | Rockwell Automation Technologies, Inc. | System and methodology providing automation security analysis and network intrusion protection in an industrial environment |
| US7530113B2 (en) * | 2004-07-29 | 2009-05-05 | Rockwell Automation Technologies, Inc. | Security system and method for an industrial automation system |
| US8174378B2 (en) * | 2005-03-18 | 2012-05-08 | Richman Technology Corporation | Human guard enhancing multiple site security system |
| US7933676B2 (en) * | 2005-09-30 | 2011-04-26 | Rockwell Automation Technologies, Inc. | Automation system with integrated safe and standard control functionality |
| US8359248B2 (en) * | 2006-08-24 | 2013-01-22 | Blue Pillar, Inc. | Systems, methods, and devices for managing emergency power supply systems |
| US9349546B2 (en) * | 2013-01-31 | 2016-05-24 | Rockwell Automation Technologies, Inc. | Industrial automation emergency stop with state indictor |
| US9804576B2 (en) * | 2013-02-27 | 2017-10-31 | Rockwell Automation Technologies, Inc. | Recognition-based industrial automation control with position and derivative decision reference |
| US9798302B2 (en) * | 2013-02-27 | 2017-10-24 | Rockwell Automation Technologies, Inc. | Recognition-based industrial automation control with redundant system input support |
| US9498885B2 (en) * | 2013-02-27 | 2016-11-22 | Rockwell Automation Technologies, Inc. | Recognition-based industrial automation control with confidence-based decision support |
| US9393695B2 (en) * | 2013-02-27 | 2016-07-19 | Rockwell Automation Technologies, Inc. | Recognition-based industrial automation control with person and object discrimination |
| US20140277613A1 (en) * | 2013-03-14 | 2014-09-18 | Tait Towers Manufacturing, LLC | Emergency stop system for an automation and motion control system |
| US10020151B2 (en) * | 2013-12-31 | 2018-07-10 | Rockwell Automation Technologies, Inc. | Safety relay configuration system with multiple test pulse schemes using graphical interface |
-
2017
- 2017-06-19 US US15/627,066 patent/US10338557B2/en active Active
-
2018
- 2018-04-26 EP EP18169580.0A patent/EP3418825A1/en not_active Ceased
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1405700A2 (en) * | 2002-10-04 | 2004-04-07 | COMAU S.p.A. | Portable terminal for controlling, programming and/or teaching robots or similar automatic apparatuses |
| JP2005339890A (en) * | 2004-05-25 | 2005-12-08 | Idec Izumi Corp | Safety switch device |
| EP1716982A1 (en) * | 2005-04-19 | 2006-11-02 | COMAU S.p.A. | Process for controlling industrial robots, and related robots, robot systems and computer programs |
| US20160203282A1 (en) * | 2013-08-16 | 2016-07-14 | Intuitive Surgical Operations, Inc. | System and method for coordinated motion among heterogeneous devices |
| US20160136814A1 (en) * | 2014-11-18 | 2016-05-19 | Staubli Faverges | Method for disconnecting a manual control unit from a multi-axis robot and robot for implementing such a method |
Non-Patent Citations (2)
| Title |
|---|
| ANONYMOUS: "Timing Synchronization Function - Wikipedia", 14 February 2017 (2017-02-14), XP055796214, Retrieved from the Internet <URL:https://web.archive.org/web/20170214231814/https://en.wikipedia.org/wiki/Timing_Synchronization_Function> [retrieved on 20210416] * |
| MAHMOOD ANEEQ ET AL: "Impact of hard-and software timestamping on clock synchronization performance over IEEE 802.11", 2014 10TH IEEE WORKSHOP ON FACTORY COMMUNICATION SYSTEMS (WFCS 2014), IEEE, 5 May 2014 (2014-05-05), pages 1 - 8, XP032608494, DOI: 10.1109/WFCS.2014.6837584 * |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3719595A1 (en) * | 2019-04-05 | 2020-10-07 | Graf-Syteco GmbH & Co. KG | Operation of a technical system |
| DE102019108975A1 (en) * | 2019-04-05 | 2020-10-08 | GRAF-SYTECO GmbH & Co.KG | Operation of a technical system |
| WO2021249757A1 (en) * | 2020-06-08 | 2021-12-16 | Kuka Deutschland Gmbh | Safety control system and method for executing a safety function |
Also Published As
| Publication number | Publication date |
|---|---|
| US10338557B2 (en) | 2019-07-02 |
| US20180364670A1 (en) | 2018-12-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3418825A1 (en) | Systems and methods for safety input devices | |
| US10969759B2 (en) | Safety controller module | |
| EP3588208B1 (en) | Servo system | |
| US8401678B2 (en) | Mobile control and monitoring system | |
| US8032253B2 (en) | Automatic machine system and wireless communication method thereof | |
| RU2530256C2 (en) | Method and apparatus for controlling operating field devices through portable communicator | |
| WO2017208800A1 (en) | Teaching device | |
| CN108459564B (en) | Control system | |
| EP3140705A2 (en) | Automation interface | |
| WO2002078915A1 (en) | Industrial robot | |
| CN108724223A (en) | Robot controller | |
| US9823648B2 (en) | Method and apparatus for an automated configuration of a monitoring function of an industrial robot | |
| EP3581343A1 (en) | A safety control system for an industrial robot and the industrial robot | |
| US10649431B2 (en) | Control system for electrically controlled installations | |
| US20070078629A1 (en) | Distributed control system diagnostic logging system and method | |
| JP4200889B2 (en) | Robot system | |
| CN109074065B (en) | Device and method for adapting a numerical control device to a machine to be controlled, and numerical control device | |
| US11745373B2 (en) | Method and cutting machine with safety-monitored reversing of the dangerous cutting blade movement in the event of danger | |
| EP1906284A1 (en) | A control device for controlling an industrial robot | |
| WO2007025928A1 (en) | A portable operating device for an industrial robot | |
| CN107621794B (en) | Method for controlling driving device and system for performing the same | |
| CN115210659A (en) | Operation auxiliary system for industrial plant | |
| JP7571059B2 (en) | Safety switch element for a machine or robot | |
| CN109725574B (en) | Control method of power saving system of automatic equipment | |
| EP4325309A1 (en) | System for controlling operation of an automation component |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20190605 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20191218 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN REFUSED |
|
| 18R | Application refused |
Effective date: 20211201 |