EP3404258A1 - Steuerungssysteme und -verfahren zur stromerzeugung - Google Patents
Steuerungssysteme und -verfahren zur stromerzeugung Download PDFInfo
- Publication number
- EP3404258A1 EP3404258A1 EP18172275.2A EP18172275A EP3404258A1 EP 3404258 A1 EP3404258 A1 EP 3404258A1 EP 18172275 A EP18172275 A EP 18172275A EP 3404258 A1 EP3404258 A1 EP 3404258A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- power
- wind turbine
- set point
- mode
- control scheme
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 59
- 238000010248 power generation Methods 0.000 title claims abstract description 19
- 238000012937 correction Methods 0.000 claims abstract description 71
- 230000006641 stabilisation Effects 0.000 claims abstract description 36
- 238000011105 stabilization Methods 0.000 claims abstract description 36
- 230000004044 response Effects 0.000 claims abstract description 33
- 230000003213 activating effect Effects 0.000 claims abstract description 6
- 238000012544 monitoring process Methods 0.000 claims abstract description 6
- 238000012546 transfer Methods 0.000 claims description 23
- 230000008569 process Effects 0.000 claims description 8
- 230000007704 transition Effects 0.000 claims description 8
- 238000005457 optimization Methods 0.000 claims description 6
- 230000006870 function Effects 0.000 description 26
- 238000010586 diagram Methods 0.000 description 12
- 238000005259 measurement Methods 0.000 description 12
- 230000003534 oscillatory effect Effects 0.000 description 9
- 238000006243 chemical reaction Methods 0.000 description 7
- 230000007423 decrease Effects 0.000 description 7
- 230000008859 change Effects 0.000 description 5
- 230000008878 coupling Effects 0.000 description 5
- 238000010168 coupling process Methods 0.000 description 5
- 238000005859 coupling reaction Methods 0.000 description 5
- 230000033228 biological regulation Effects 0.000 description 4
- 230000008901 benefit Effects 0.000 description 3
- 238000012163 sequencing technique Methods 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 238000004146 energy storage Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000007493 shaping process Methods 0.000 description 2
- 230000001360 synchronised effect Effects 0.000 description 2
- 238000013329 compounding Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000011888 foil Substances 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 230000000977 initiatory effect Effects 0.000 description 1
- 230000010358 mechanical oscillation Effects 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 230000035515 penetration Effects 0.000 description 1
- 230000004224 protection Effects 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000009987 spinning Methods 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
Images









Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03D—WIND MOTORS
- F03D7/00—Controlling wind motors
- F03D7/02—Controlling wind motors the wind motors having rotation axis substantially parallel to the air flow entering the rotor
- F03D7/04—Automatic control; Regulation
- F03D7/042—Automatic control; Regulation by means of an electrical or electronic controller
- F03D7/048—Automatic control; Regulation by means of an electrical or electronic controller controlling wind farms
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03D—WIND MOTORS
- F03D17/00—Monitoring or testing of wind motors, e.g. diagnostics
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03D—WIND MOTORS
- F03D7/00—Controlling wind motors
- F03D7/02—Controlling wind motors the wind motors having rotation axis substantially parallel to the air flow entering the rotor
- F03D7/0276—Controlling wind motors the wind motors having rotation axis substantially parallel to the air flow entering the rotor controlling rotor speed, e.g. variable speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03D—WIND MOTORS
- F03D7/00—Controlling wind motors
- F03D7/02—Controlling wind motors the wind motors having rotation axis substantially parallel to the air flow entering the rotor
- F03D7/028—Controlling wind motors the wind motors having rotation axis substantially parallel to the air flow entering the rotor controlling wind motor output power
- F03D7/0284—Controlling wind motors the wind motors having rotation axis substantially parallel to the air flow entering the rotor controlling wind motor output power in relation to the state of the electric grid
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03D—WIND MOTORS
- F03D9/00—Adaptations of wind motors for special use; Combinations of wind motors with apparatus driven thereby; Wind motors specially adapted for installation in particular locations
- F03D9/20—Wind motors characterised by the driven apparatus
- F03D9/25—Wind motors characterised by the driven apparatus the apparatus being an electrical generator
- F03D9/255—Wind motors characterised by the driven apparatus the apparatus being an electrical generator connected to electrical distribution networks; Arrangements therefor
- F03D9/257—Wind motors characterised by the driven apparatus the apparatus being an electrical generator connected to electrical distribution networks; Arrangements therefor the wind motor being part of a wind farm
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B13/00—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion
- G05B13/02—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric
- G05B13/0205—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric not using a model or a simulator of the controlled system
- G05B13/024—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric not using a model or a simulator of the controlled system in which a parameter or coefficient is automatically adjusted to optimise the performance
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E10/00—Energy generation through renewable energy sources
- Y02E10/70—Wind energy
- Y02E10/72—Wind turbines with rotation axis in wind direction
Definitions
- the present disclosure relates generally to wind turbines, and more particularly to providing stabilization control for wind turbines.
- Wind power is considered one of the cleanest, most environmentally friendly energy sources presently available, and wind turbines have gained increased attention in this regard.
- a modern wind turbine typically includes a tower, a generator, a gearbox, a nacelle, and a rotor including one or more rotor blades.
- the rotor blades capture kinetic energy from wind using known foil principles and transmit the kinetic energy through rotational energy to turn a shaft coupling the rotor blades to a gearbox, or if a gearbox is not used, directly to the generator.
- the generator then converts the mechanical energy to electrical energy that may be deployed to a utility grid.
- Wind turbine generators and wind farms are typically designed to deliver constant active and reactive power to the utility grid with the delivered power being independent of system frequency. This is accomplished by decoupling the rotor inertia and speed from the grid using fast acting power electronics and controls. Due to increases in wind-farm size and penetration, some utilities are now requiring that wind-farm and wind-turbine controls provide enhanced capabilities such as frequency stabilization.
- the grid frequency tends to decrease when the load exceeds the generation and to increase when the generation exceeds the load. Such decreases or increases may occur in a monotonic manner, an oscillating manner, or combinations thereof when the grid is subjected to a sudden change in the balance between generation and load. It is a consideration in the design of such a system that any method to achieve compensation of such decreases or increases should be one that does not cause unacceptable coupling between grid oscillatory modes and the wind turbine mechanical oscillatory modes.
- Modern wind farms include the capability to curtail output power below the level available based on wind conditions.
- Utility grid operators sometimes require curtailment if the available grid power is not needed by the utility.
- Continuous curtailment may also be required by utility operators to provide an operating range for the wind farm to increase power output when frequency decreases.
- the present disclosure is directed to systems and methods for controlling a wind turbine connected to a power grid that activates a predefined control scheme in response to a frequency drop in the power grid in order to the grid requirements thereof.
- the present disclosure is directed to a method for controlling a wind turbine connected to a power grid.
- the method includes monitoring a frequency of the power grid.
- a frequency event such as a frequency drop or decrease, occurring in the power grid
- the method includes activating a control scheme in order to meet one or more grid requirements of the power grid.
- the control scheme includes increasing a power output of the wind turbine to, at least, a pre-event measured grid power.
- the method includes calculating a power correction factor for a power set point of the wind turbine as a function of, at least, the frequency event.
- the method includes adjusting the power set point via the power correction factor such that the power output follows a predetermined trajectory.
- the control scheme includes controlling, via a turbine controller, the wind turbine based on the adjusted power set point for as long as the control scheme is activated.
- control scheme further includes applying a gain to the power correction factor to obtain an adjusted power correction factor. More specifically, in such embodiments, the gain may be determined as a function of one or more electrical or mechanical limits of the wind turbine.
- control scheme may include calculating a torque correction factor as a function of the adjusted power correction factor and a speed of the wind turbine, adding the torque correction factor to a torque set point as a feedforward term, and adding the adjusted power correction factor to the power set point.
- the method may include imposing an above rated mode when the control scheme is activated such that a speed regulator governs a pitch angle and a power regulator governs the torque set point.
- the method may include switching a mode of operation when the control scheme is deactivated from the imposed above rated mode to an optimum operation condition or switching the mode of operation from the above rated mode of operation to a below rated mode of operation where the speed regulator is controlling the torque set point.
- the method may include switching the mode to the above rated mode of operation when the control scheme is activated. In such embodiments, the method may also include switching the mode of operation back to the below rated mode of operation when the frequency event is over.
- control scheme may include changing a speed set point of the wind turbine to a rated speed of the wind turbine via a bumpless transfer. More specifically, in one embodiment, while switching the mode back to the below rated mode of operation, the step of changing the speed set point of the wind turbine to the rated speed of the wind turbine via the bumpless transfer may include tracking, via at least one filter, a current speed of the wind turbine and gradually increasing the speed set point based on the tracking until the rated speed is reached so as to smoothly transition out of the control scheme.
- the method may include transitioning out of the control scheme when the frequency event is over via a standard or normal operating process.
- the standard operating process may include increasing the adjusted power set point to a predetermined power set point.
- the method may include disabling one or more control loops of the turbine controller for as long as the control scheme is activated, wherein disabling the one or more control loops prevents an additional power drop of the wind turbine.
- the present disclosure is directed to a method for controlling a wind turbine connected to a power grid.
- the method includes monitoring a frequency of the power grid.
- the method includes activating a control scheme in order to meet one or more grid requirements of the power grid.
- the control scheme includes calculating a power correction factor for the power set point as a function of, at least, the frequency event.
- the control scheme includes calculating a torque correction factor as a function of the power correction factor and a speed of the wind turbine.
- the control scheme includes adjusting the power set point via the power correction factor.
- the control scheme includes adding the torque correction factor to the adjusted power set point as a feedforward term.
- the control scheme also includes controlling, via a turbine controller, the wind turbine based on the adjusted power set point for as long as the control scheme is activated. It should also be understood that the method may further include any of the additional features and/or steps as described herein.
- the present disclosure is directed to a stabilization system for a wind power generation system connected to a power grid.
- the stabilization system includes a deadband limiter for detecting when a signal is outside of a respective signal range, wherein the signal comprises a frequency.
- the stabilization system includes a power shaper for providing a supplementary power correction factor as a function of the frequency.
- the system includes a torque shaper for initially increasing a power output of the wind turbine to a pre-event measured grid power and adjusting a power set point as a function of the supplementary power correction factor so as to temporarily boost the supplied power to the power grid in response to the signal being outside of the respective signal range.
- the system includes a turbine controller for controlling the wind turbine based on the adjusted power set point for as long as the signal is outside of the respective signal range. It should also be understood that the system may further include any of the additional features as described herein.
- the stabilization system may further include a gain block for applying a gain to the power correction factor to obtain an adjusted power correction factor, the gain being determined as a function of one or more electrical or mechanical limits of the wind turbine.
- the system may include a power regulator optimization module for calculating a torque correction factor as a function of the adjusted power correction factor and a speed of the wind turbine, adding the torque correction factor to a torque set point as a feedforward term, and adding the adjusted power correction factor to the power set point.
- the system may include an operational mode selector for determining a mode of operation of the wind turbine.
- the operational mode selector is configured to impose an above rated mode when the control scheme is activated such that a speed regulator is governing a pitch angle and a power regulator is governing the torque set point.
- the operational mode selector is further configured to switch a mode of operation when the control scheme is deactivated from the imposed above rated mode to an optimum operation condition or switch the mode of operation from the above rated mode of operation to a below rated mode of operation where the speed regulator is controlling the torque set point.
- the turbine controller switches the mode to the above rated mode of operation in response to the signal being outside of the respective signal range. In further embodiments, the turbine controller may also switch the mode back to the below rated mode of operation in response to the signal returning within the respective signal range.
- the stabilization system may also include a bumpless transfer module for changing a speed set point of the wind turbine to a rated speed of the wind turbine while switching the mode back to the below rated mode of operation.
- the bumpless transfer module may include a low-pass filter for tracking a current speed of the wind turbine and gradually increasing the speed set point based on the tracking until the rated speed is reached so as to smoothly transition out of the control scheme.
- the turbine controller may disable a drivetrain damper of the wind turbine in response to the signal being outside of the respective signal range.
- FIG. 1 illustrates a wind turbine system 110 operable to generate electric power is illustrated.
- the wind turbine system 110 includes a hub 112 having multiple rotor blades 114 mounted thereto.
- the rotor blades 114 convert the mechanical energy of the wind into a rotational torque, which is further converted into electrical energy by the wind turbine system 110.
- the wind turbine system 110 further includes a turbine portion 116 that is operable to convert the mechanical energy of the wind into a rotational torque and a power conversion system 118 that is operable to convert the rotational torque produced by the turbine portion 116 into electrical power.
- a drive train 120 is provided to couple the turbine portion 116 to the power conversion system 118.
- the wind turbine power conversion system 118 typically comprises a doubly fed asynchronous generator with a power electronic converter for rotor field control or a synchronous generator for use with a full power electronic converter interface to collector system 134.
- the turbine portion 116 includes a turbine rotor low-speed shaft 122 that is coupled to the hub 112. Rotational torque is transmitted from rotor low-speed shaft 122 to a generator shaft 124 via drive train 120.
- drive train 120 includes a gear box 126 transmitting torque from low-speed shaft 122 to a high speed shaft 130.
- a high speed shaft 130 is coupled to power conversion system shaft 124 with a coupling element 128.
- Power conversion system 118 is coupled to wind turbine controls 144.
- Wind turbine controls 144 receive signals 146 from the power conversion system that are representative of the operating parameters of the system. Wind turbine controls 144, in response, may generate control signals, for example a pitch signal 156 to change the pitch of blades 114 or a torque signal for the power conversion system. Wind turbine controls 144 are also coupled to a wind farm controller 132.
- an electrical power generation system 10 for generating electrical power is illustrated.
- the electrical power generation system 10 includes a wind farm 11 electrically coupled to an electrical grid 12.
- the electrical grid 12 is utilized to transfer electrical power from the wind farm 11 to electrical loads.
- the wind farm 11 is provided to generate electrical power utilizing wind energy.
- the wind farm 11 includes wind turbines 14, 15, 16 (more generally referenced as “energy sources”), a collector system 18, a transformer 20, wind turbine controllers 24, 26, 28, a measurement device 30, and a wind farm controller 32. It should be noted that a number of wind turbines utilized in the wind farm 11 can vary. For example, the number of wind turbines in the wind farm 11 can be greater than three wind turbines or less than or equal to three wind turbines.
- the wind turbines 14, 15, 16 are provided to generate voltages and currents utilizing wind energy.
- the wind turbines 14, 15, 16 are operably controlled utilizing the wind turbine controllers 24, 26, 28, respectively, which communicate with the wind turbines 14, 15, 16, respectively.
- the wind turbine controllers 24, 26, 28 are configured to generate command signals which control operation of the wind turbines 14, 15, 16, respectively. Further, the wind turbine controllers 24, 26, 28 are provided to measure operational parameters associated with the wind turbines 14, 15, 16 respectively. The wind turbine controllers 24, 26, 28 operably communicate with the wind farm controller 32.
- the collector system 18 is electrically coupled to the wind turbines 14, 15, 16 and routes voltages and currents from each of the turbines to the power transformer 20.
- the power transformer 20 receives the voltages and currents from the wind turbines 14, 15, 16 and outputs a voltage and a current having desired characteristics onto the electrical grid 12. For example, the power transformer 20 can output a voltage having a desired amplitude and a current having a desired amplitude onto the electrical grid 12.
- the measurement device 30 is electrically coupled to a point of interconnection 19 between the transformer 20 and the electrical grid 12.
- the measurement device 30 is configured to measure electrical parameters associated with the electrical grid.
- the measurement device 30 is configured to measure a voltage level (V POI ) at the point of interconnection 19, a real power level (P n ) at the point of interconnection 19, and a frequency level (F n ) at the point of interconnection 19.
- V POI voltage level
- P n real power level
- F n frequency level
- the wind farm controller 32 is provided to control operation of the wind turbines 14, 15, 16 based on measured or estimated parameter values at the point of interconnection 19 associated with either the wind farm 11 or the electrical grid 12.
- the wind farm controller 32 is configured to generate command messages that are received by the wind turbine controllers 24, 26, 28 for controlling operation of the wind turbines 14, 15, 16, respectively.
- the wind turbines 14, 15, 16 can be operated based on various operational modes of operation.
- the control system includes a stabilization system 21 for a power generation system 10 (such as one of the wind turbines 14, 15, 16) connected to a power grid 12.
- the stabilization system 21 includes an input frequency washout 35 configured for tracking slow variations in grid frequency and used for calculating frequency deviations around a center point.
- the stabilization system 21 includes a deadband limiter 25 configured for detecting when a signal 23 from the input frequency washout 35 is outside of a signal range.
- the signal 23 may include any appropriate signal.
- the signal 23 corresponds to system frequency.
- the signal may be obtained either by direct measurement of the respective signal or by measurement of another signal and computations to obtain the respective signal.
- the stabilization system 21 in response to detecting a frequency event, such as a frequency drop or decrease that is outside of the signal range, is configured to activate a control scheme in order to meet one or more grid requirements of the power grid 12 for as long as the signal 23 is outside of the signal range.
- the deadband limiter 25 is configured to limit the frequency deviation signal between frequency threshold values determined by the application.
- Utility grid frequency typically has a nominal value equal to either 50 Hertz (Hz) or 60 Hz. However, the frequency may drift somewhat such that the center point is at a different value such as 59.9 Hz rather than 60 Hz, for example.
- the input frequency washout 35 is used to find the actual frequency rather than the nominal value. Typically, the frequency is measured at a substation of the wind farm 11, but measurement at that location is not required.
- the frequency deadband limiter 25 is used to limit the response of the stabilization system 21 to sufficiently large events.
- the frequency will always vary somewhat due to dithering that occurs when loads come on and off the system.
- load variation typically affects frequency by about 0.05 Hz, depending on the system.
- the stabilization system 21 is useful for more significant events that occur when a sudden difference is present between load and generation. Such significant events may include a utility system losing a large generator or a transmission line tripping.
- the deadband is set to a predetermined value, such as plus or minus 0.12 Hz off the center point frequency. The selection of this limit is typically based on factors such as the location and nature of the power generation system and the variability of frequency center points.
- the stabilization system 21 may have a variable limit that is set by the end user after taking into account such factors.
- the stabilization system 21 may also include a power shaper 33 configured for generating a supplementary power correction factor 56 as a function of the frequency in response to the signal 23 being outside of the signal range.
- the power correction factor 56 may include any linear or non-linear term.
- the power correction factor 56 may be calculated in real-time or may be predetermined static factor pre-programed in the turbine controller 31.
- the stabilization system 21 includes a limit controller 29 configured to prevent the adjustment signal from causing the energy source of the power generation system to operate outside of at least one operating constraint.
- the stabilization system 21 includes a turbine controller 31 for controlling the power generation system 10 based on an adjustment signal 41 for as long as the signal 23 is outside of the respective signal range.
- the power shaper 33 provides a signal for the turbine controller 31 to transiently boost power while staying within energy source operating constraints and limiting coupling between grid oscillatory modes and energy source mechanical modes.
- power could alternatively be used for the same effect, and power as used herein is meant to encompass torque.
- the system may be set up to be based on power throughout, torque throughout, or a combination of power and torque.
- the control scheme is completed for a power response, but implementation is such that the wind turbine obtains a torque command that corresponds to the desired power control.
- Such systems may be characterized by an elemental rotating system having two inertias connected by a spring.
- the spring can be a physical shaft or the behavior of generators interconnected by a transmission network.
- a wind turbine has some inertia in the wind turbine hub end and some inertia in the wind turbine generator with the shaft between them being susceptible to spring type motion and oscillatory modes.
- other generators on the utility system have respective inertias that may result in oscillatory modes. Such oscillatory modes may perturb the utility grid frequency.
- the power shaper 33 is configured to shape a pulse in response to the frequency event and decrease the frequency disturbance magnitude in the power generation system.
- the power shaper 33 may be made to address either positive or negative frequency events, the shaper 33 will be particularly useful in embodiments addressing negative frequency events because less alternatives (other than curtailed power operation) exist to momentarily increase power above nominal.
- the limit controller 29 is used to prevent turbine over and under speed operation. Most 60 Hz wind turbines have a predetermined speed range, such as for example from about 800 rotations per minute (rpm) to about 1700 rpm. The goal when the operating constraint is generator rotor speed is to ensure that no request is processed for additional power when the generator is close to the wind turbine cut-in speed limit and that no control signal for reducing power is processed when the generator is close to the wind turbine cut-out speed limit.
- the limit controller 29 includes a power limiter 40 configured to change the bounds of integrator 54 in response to the wind turbine speed (i.e. the generator speed or the rotor speed).
- the generator speed is just one example of an operating constraint and other constraints may be used in addition or alternatively, as discussed below.
- the adjustment signal 41 may include any combination of a power command, a torque command, and/or a speed command.
- the adjustment signal 41 is typically further constrained so as to limit oscillatory coupling. If the grid frequency is oscillatory but at a level smaller than the deadband, no adjustment signal is generated. If the grid is oscillatory and larger than the deadband, then the shaping characteristic prevents the compounding of the oscillation.
- the shape of the power adjustment signal can be controlled by gain and ramp values that will typically vary with application, due to differing utility requirements and responses.
- the illustrated stabilization system 21 further includes an output frequency washout 42 configured to drive an adjustment signal ⁇ P to zero.
- the output frequency washout 42 is shown in the illustrated position for purposes of example only and may be present in any appropriate control block.
- the washout function may be included within control loop 27.
- the stabilization system 21 may include a limiter 34 configured to modify an output of the output frequency washout 42.
- the output of the limiter 34 may be referred to herein as the supplementary power correction factor 56.
- the power shaper 33 includes a gain block 50 and a control loop 27 used to provide a shaping response which is faster upon initiation and slower upon recovery (in other words "fast up, slow down”).
- the gain of block 60 may vary and will typically be set according to location and system requirements.
- the gain block 50 is used to control the rate of signal adjustment for the integrator 54.
- the gain of block 50 is typically a fixed value designed to control the response of the control loop 27.
- the frequency is quickly compensated for upon an event, but the power adjustment after the event recovers slowly.
- the gain block 50 defines the pulse shape and may be varied based on system needs or conditions.
- at least one of the parameter settings for the gain block 50 is configured for having a variable value in response to at least one of a utility condition, a utility command, generator speed, and air density.
- the stabilization system 21 further includes a torque shaper 60 configured to modify the supplementary power correction factor 56 before being used as an input for the turbine controller 31. More specifically, as shown, the torque shaper 60 receives the supplementary power correction factor 56 and applies a tunable gain to the signal via gain block 58 to obtain an adjusted power set point 64.
- the gain may be a function of one or more electrical and/or mechanical system capabilities as well as limits requested from the utility/grid operator.
- the adjusted power set point 64 can then be further modified via one or more modules 70, 72, 74, 76 within the torque shaper 60, which are discussed in more detail below.
- FIGS. 4-11 illustrates various schematic block diagrams of the various modules 70, 72, 74, 76 of the torque shaper 60 illustrated in FIG. 3 .
- one of the modules of the torque shaper 60 may include an operational mode selector module 70.
- the operational mode selector module 70 allows the turbine controller 31 to assign appropriate regulation functions for the wind turbine 10. More specifically, as shown in FIG. 4 , the mode selector module 70 allows the turbine controller 31 to assign appropriate regulation functions (e.g. torque set point 43 and angle set point 44) for the pitch drive system 47 and the converter controller 45 when the control scheme is activated (as shown at block 82 of FIG. 3 ).
- appropriate regulation functions e.g. torque set point 43 and angle set point 44
- the pitch controller 45 is operating in a speed regulation mode and the converter controller 47 is operating in power regulation mode.
- the control scheme when activated, is configured to optimize operation of the turbine controller 31 such that the power converter operates to regulate power while the pitch system will regulate the speed during the frequency event.
- the power regulator 39 of the turbine controller 31 may generate the torque set point 43 using a proportional integral controller 53.
- the proportional integral controller 53 receives a difference between the power set point of the power generation system 10 and the power feedback from the grid 12. The output of the proportional integral controller 53 may then be fed into a ramp rate limiter 55 that generates the torque set point 43 for the converter controller 45 ( FIG. 5 ).
- the torque set point 43 from the power regulator 39 may be used as an input to the power regulator optimizer module 74, which is further discussed below.
- one of the modules of the torque shaper 60 may include a power set point sequence module 72.
- the power set point sequence module 72 assists to initialize the power set point regulator so as to minimize the error with respect to power feedback, thereby creating a bumpless transfer of the power set point. More specifically, as shown, when the control scheme is activated (as indicated by line 63 changing from zero to one in FIG. 8 ), the power set point sequencing block 57 receives the power feedback 59 from the grid 12 and sets the power command 61 to a pre-event measured grid power (i.e. a measured power of the electrical grid 12 before the frequency event occurs). As such, the torque shaper 60 is configured to adjust the power set point as a function of the supplementary power correction factor 56 so as to temporarily boost the supplied power to the power grid 12 in response to the signal being outside of the respective signal range.
- a temporary power boost may be obtained by temporarily absorbing energy from the energy source.
- the additional energy is available from the turbine inertia and from excess wind.
- other forms of energy storage besides inertia (such as battery storage) can also be used.
- the power may be increased by five to ten percent for up to ten seconds.
- another one of the modules of the torque shaper 60 may include a power regulator optimization module 74. More specifically, as shown in FIG. 9 , the power regulator optimization module 74 is configured to calculate a torque correction factor 65 as a function of the adjusted power correction factor 64 and a speed 78 of the power generation system 10. In such embodiments, the torque correction factor 65 can be added to the torque set point 43 as a feedforward term to obtain an adjusted torque set point 67. In other words, as shown, the adjusted power correction factor 64 is fed to the power regulator optimization module 74 of the turbine controller 31 in two places: to the power regulator closed loop to ensure that the power regulator is optimized and as a feedforward term for quick response.
- the turbine controller 31 is configured to switch the mode to the above rated mode of operation in response to the signal 23 being outside of the respective signal range. In further embodiments, the turbine controller 31 may also switch the mode back to the below rated mode of operation in response to the signal returning within the respective signal range.
- still another one of the modules of the torque shaper 60 may include a bumpless transfer module 76.
- the module 76 when the control scheme is active 82, the module 76 is configured to optimize operation of the system 10, however, oftentimes, there are multiple control loops active during operation thereof that can reduce the power output of the system 10.
- one of the control loops may include the drivetrain damper of the power generation system 10, which may reduce the power output of the system 10.
- the bumpless transfer module 76 is configured to disable the drivetrain damper of the wind turbine 10 in response to the signal 23 being outside of the respective signal range to prevent a power reduction.
- the bumpless transfer module 76 is configured to disable the drivetrain damper of the wind turbine 10 in response to the signal 23 being outside of the respective signal range to prevent a power reduction.
- the module 76 is configured to determine when the frequency event is over, and then provide a drivetrain damper bumpless transfer 88.
- the module 76 implements the bumpless transfer 88 via a low-pass filter.
- the output of the bumpless transfer module 76 may be fed through a torque damper 68 before being provided to the turbine controller 31.
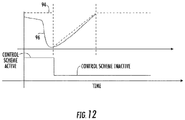
- the speed set point 94 of the system 10 may be initialized or changed to a rated speed via bumpless transfer as shown at block 90. Similar to FIG. 11 , as shown at 92 and FIG. 12 , the speed set point 94 may track the turbine speed 96, e.g. via a low-pass filter. Thus, the module 76 is configured to gradually increase the speed set point 94 based on the tracking until the rated speed is reached so as to smoothly transition out of the control scheme. It should be understood that the speed set point 94 may be ramped back to the rated speed via a fixed or variable rate.
- the bumpless transfer module 76 may transition out of the control scheme when the frequency event is over via a standard or normal operating process.
- the standard operating process may include increasing the adjusted power set point to a predetermined power set point.
- wind turbines are illustrated as the energy sources, the concepts disclosed herein are believed to be applicable to any non-conventional energy sources with several other examples including battery energy storage, microturbines, and/or fuel cells.
- the power obtained from the stabilization system 21 is not supported by the wind, so the turbine will slow down to provide the power from the spinning inertia.
- the energy source includes a generator with a constraint on the rotation speed of the generator.
- operating constraints may include, for example, constraints such as turbine torque (magnitude and time) constraints, ramp rate constraints, and blade pitch operating constraints.
- Torque constraints are typically set based on turbine design (that is, by how much and for how long a turbine can withstand exceeding its rated operating point).
- the output frequency washout 42 can be used to build in protections for such operating constraints.
- the deadband limiter 25, the power shaper 33, the limit controller 29, and/or the torque shaper 60 are embodied in a power generation system controller 32 ( FIG. 2 ).
- the deadband limiter 25, the power shaper 33, the limit controller 29, and/or the torque shaper 60 are embodied in a controller 24 of an energy source 14 ( FIG. 2 ).
- a separate controller (not shown) may be coupled to either the system controller 32 or the source controller 24, or the various control sub-units/functions may be spread among several controllers.
- frequency estimation may be centralized or distributed.
- a frequency signal may be obtained by any desired means with several examples including: measurements at the energy source, measurements at a substation point 19 ( FIG. 2 ), measurements at the utility connection, or information from the utility.
- measurements are obtained at a substation because power fluctuations will tend to modulate apparent frequency (defined as the rate of change of voltage angle) differently at each turbine.
Landscapes
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Artificial Intelligence (AREA)
- Health & Medical Sciences (AREA)
- Power Engineering (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Evolutionary Computation (AREA)
- Medical Informatics (AREA)
- Software Systems (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Control Of Eletrric Generators (AREA)
- Wind Motors (AREA)
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| IN201741017643 | 2017-05-19 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP3404258A1 true EP3404258A1 (de) | 2018-11-21 |
Family
ID=62167194
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP18172275.2A Pending EP3404258A1 (de) | 2017-05-19 | 2018-05-15 | Steuerungssysteme und -verfahren zur stromerzeugung |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10731633B2 (de) |
| EP (1) | EP3404258A1 (de) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020254161A1 (en) * | 2019-06-21 | 2020-12-24 | The University Of Birmingham | Fast frequency support from wind turbine systems |
| WO2024107191A1 (en) * | 2022-11-17 | 2024-05-23 | General Electric Renovables Espana S.L. | System and method for controlling a wind turbine |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102016125947A1 (de) * | 2016-12-30 | 2018-07-05 | Wobben Properties Gmbh | Verfahren zum Steuern eines elektrischen Verteilnetzes |
| DE102018116446A1 (de) * | 2018-07-06 | 2020-01-09 | Wobben Properties Gmbh | Windenergiesystem und Verfahren zum Erkennen niederfrequenter Schwingungen in einem elektrischen Versorgungsnetz |
| US10975847B1 (en) * | 2019-11-08 | 2021-04-13 | General Electric Company | System and method for farm-level control of transient power boost during frequency events |
| WO2021170189A1 (en) | 2020-02-26 | 2021-09-02 | Vestas Wind Systems A/S | A method for controlling a renewable power plant during voltage events |
| CN115839305B (zh) * | 2021-09-22 | 2023-11-28 | 北京金风科创风电设备有限公司 | 风储联合调频方法和风储联合调频装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20090194995A1 (en) * | 2008-01-31 | 2009-08-06 | General Electric Company | Power generation stabilization control systems and methods |
| US20120161444A1 (en) * | 2009-06-29 | 2012-06-28 | Tarnowski German Claudio | Wind turbine providing grid support |
| EP3007298A1 (de) * | 2014-10-07 | 2016-04-13 | Siemens Aktiengesellschaft | Generische Frequenzantwort für Windkraftsysteme |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7528496B2 (en) | 2003-09-03 | 2009-05-05 | Repower Systems Ag | Method for operating or controlling a wind turbine and method for providing primary control power by means of wind turbines |
| DE102010014165A1 (de) | 2010-04-08 | 2011-10-13 | Repower Systems Ag | Dynamische Trägheitsregelung |
| US9728969B2 (en) * | 2011-05-31 | 2017-08-08 | Vestas Wind Systems A/S | Systems and methods for generating an inertial response to a change in the voltage of an electricial grid |
| EP2679809A1 (de) | 2012-06-28 | 2014-01-01 | Siemens Aktiengesellschaft | Verfahren und Anordnung zur Reaktion auf ein Netz-Ereignis, wie beispielsweise schneller Frequenzausfall, durch Kombinieren von Anfragereaktion, Trägheitsreaktion und Drehungsreserve |
| ES2607479T3 (es) * | 2012-09-14 | 2017-03-31 | Vestas Wind Systems A/S | Control de parque durante un evento de baja tensión o de alta tensión |
| EP2932093B1 (de) * | 2012-12-14 | 2018-10-31 | Vestas Wind Systems A/S | Verfahren und anordnung zur schnellen leistungsregelung |
| US9450416B2 (en) * | 2013-07-16 | 2016-09-20 | Siemens Aktiengesellschaft | Wind turbine generator controller responsive to grid frequency change |
| US20160160839A1 (en) | 2014-12-09 | 2016-06-09 | State Grid Corporation Of China | Method for controlling inertia response of variable-speed wind turbine generator |
| EP3096004A1 (de) | 2015-05-18 | 2016-11-23 | ABB Technology AG | Windparkträgheitsreaktion |
| EP3359811B1 (de) * | 2015-10-09 | 2020-09-23 | Vestas Wind Systems A/S | Leistungsverstärkung einer windturbine mittels modellvorhersagesteuerung |
-
2018
- 2018-05-11 US US15/977,179 patent/US10731633B2/en active Active
- 2018-05-15 EP EP18172275.2A patent/EP3404258A1/de active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20090194995A1 (en) * | 2008-01-31 | 2009-08-06 | General Electric Company | Power generation stabilization control systems and methods |
| US20120161444A1 (en) * | 2009-06-29 | 2012-06-28 | Tarnowski German Claudio | Wind turbine providing grid support |
| EP3007298A1 (de) * | 2014-10-07 | 2016-04-13 | Siemens Aktiengesellschaft | Generische Frequenzantwort für Windkraftsysteme |
Non-Patent Citations (4)
| Title |
|---|
| JACOB AHO ET AL: "An Active Power Control System for Wind Turbines Capable of Primary and Secondary Frequency Control for Supporting Grid Reliability", 51ST AIAA AEROSPACE SCIENCES MEETING INCLUDING THE NEW HORIZONS FORUM AND AEROSPACE EXPOSITION, 7 January 2013 (2013-01-07), Reston, Virigina, XP055512133, ISBN: 978-1-62410-181-6, DOI: 10.2514/6.2013-456 * |
| MORREN J ET AL: "Wind turbines emulating inertia and supporting primary frequency control", IEEE TRANSACTIONS ON POWER SYST, IEEE SERVICE CENTER, PISCATAWAY, NJ, US, vol. 21, no. 1, 1 February 2006 (2006-02-01), pages 433 - 434, XP008143711, ISSN: 0885-8950, DOI: 10.1109/TPWRS.2005.861956 * |
| OLOV SOLBERG ET AL: "Uncontrolled wind turbine Smoothed power generation A New Wind Turbine Control Method to Smooth Power Generation Modelling and Comparison to Wind Turbine Frequency Control Master of Science Thesis", 31 December 2012 (2012-12-31), XP055512138, Retrieved from the Internet <URL:http://publications.lib.chalmers.se/records/fulltext/164099.pdf> [retrieved on 20181003] * |
| ULLAH N R ET AL: "Temporary Primary Frequency Control Support by Variable Speed Wind Turbines- Potential and Applications", IEEE TRANSACTIONS ON POWER SYSTEMS, IEEE SERVICE CENTER, PISCATAWAY, NJ, US, vol. 23, no. 2, 1 May 2008 (2008-05-01), pages 601 - 612, XP011206797, ISSN: 0885-8950 * |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020254161A1 (en) * | 2019-06-21 | 2020-12-24 | The University Of Birmingham | Fast frequency support from wind turbine systems |
| CN114286892A (zh) * | 2019-06-21 | 2022-04-05 | 伯明翰大学 | 来自风力涡轮机系统的快速频率支持 |
| WO2024107191A1 (en) * | 2022-11-17 | 2024-05-23 | General Electric Renovables Espana S.L. | System and method for controlling a wind turbine |
Also Published As
| Publication number | Publication date |
|---|---|
| US20180335020A1 (en) | 2018-11-22 |
| US10731633B2 (en) | 2020-08-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8237301B2 (en) | Power generation stabilization control systems and methods | |
| US10731633B2 (en) | Power generation stabilization control systems and methods | |
| US11448187B2 (en) | Power system and method for operating a wind power system with a dispatching algorithm | |
| US8994200B2 (en) | Power system frequency inertia for power generation system | |
| JP5473592B2 (ja) | 励磁機及び系統に接続されていない電力変換器を有する可変速風力タービン | |
| US20110285130A1 (en) | Power System Frequency Inertia for Wind Turbines | |
| Sørensen et al. | Wind farm models and control strategies | |
| US8264094B2 (en) | High voltage direct current link transmission system for variable speed wind turbine | |
| EP2688172B1 (de) | Verfahren und Vorrichtung zur adaptiven Steuerung von Windparkturbinen | |
| KR20180105692A (ko) | 전기 공급 네트워크에 전력을 공급하기 위한 방법 | |
| WO2013167140A1 (en) | Method for coordinating frequency control characteristics between conventional plants and wind power plants | |
| KR20200017472A (ko) | 컨버터 제어형 발전 유닛, 특히 풍력 발전 설비에 의해 전력을 공급하기 위한 방법 | |
| CN114204591A (zh) | 使用虚拟阻抗的基于逆变器的资源的电网形成控制 | |
| EP4160852A1 (de) | System und verfahren zur wandlersteuerung einer wechselrichterbasierten ressource | |
| Rosyadi et al. | Damping load frequency in multi-area power system using wind farm cooperated Primary Load Frequency Control | |
| WO2024167493A1 (en) | Grid-forming island detection and continuous operation of an inverter-based resource | |
| Patel et al. | Improved DFIG control with decoupled control to enhance LVRT response | |
| WO2024136833A1 (en) | System and method for coordinated frequency response of an inverter-based resource to grid frequency changes | |
| AU2011203021A1 (en) | Dynamic Electric Brake For A Variable Speed Wind Turbine Having An Exciter Machine and a Power Converter Not Connected To The Grid |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20190521 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20220201 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230530 |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: GENERAL ELECTRIC RENOVABLES ESPANA, S.L. |