EP3318162A1 - Modular rocking bed with programmable control - Google Patents
Modular rocking bed with programmable control Download PDFInfo
- Publication number
- EP3318162A1 EP3318162A1 EP16197183.3A EP16197183A EP3318162A1 EP 3318162 A1 EP3318162 A1 EP 3318162A1 EP 16197183 A EP16197183 A EP 16197183A EP 3318162 A1 EP3318162 A1 EP 3318162A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- motion
- leg
- bed
- rocking
- sensors
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images










Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47C—CHAIRS; SOFAS; BEDS
- A47C21/00—Attachments for beds, e.g. sheet holders, bed-cover holders; Ventilating, cooling or heating means in connection with bedsteads or mattresses
- A47C21/006—Oscillating, balancing or vibrating mechanisms connected to the bedstead
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47D—FURNITURE SPECIALLY ADAPTED FOR CHILDREN
- A47D9/00—Cradles ; Bassinets
- A47D9/02—Cradles ; Bassinets with rocking mechanisms
- A47D9/04—Cradles ; Bassinets with rocking mechanisms with disconnectable rockers
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47D—FURNITURE SPECIALLY ADAPTED FOR CHILDREN
- A47D9/00—Cradles ; Bassinets
- A47D9/02—Cradles ; Bassinets with rocking mechanisms
- A47D9/057—Cradles ; Bassinets with rocking mechanisms driven by electric motors
Definitions
- This invention relates to rocking mechanisms for beds, cribs, and the like, and more particularly to an apparatus and a method of controlling the same, which imparts an oscillatory movement in a horizontal plane.
- the invention also relates to a device for automatically moving at least one piece of furniture, wherein the device is connected in a detachable manner to the piece of furniture.
- the present invention uses modular supporting legs which can be readily attached to a standard bed frame without altering the last. Furthermore, specifically to the object of the invention, the bed oscillatory motion is generated within the supporting legs.
- the oscillatory motion may be activated, deactivated and parameterized based on the user sleep status in an automated manner using motion, temperature, heart rate, blood pressure, brain activity and weight sensors.
- the oscillatory motion characteristics are also user configurable through a control panel, or remotely from a terminal connected to a data communication network.
- a rocking or swinging bed may also help those with sleep disorders to achieve a full night sleep without the need of using medication.
- the rocking beds main technical problem is the size and complexity of the device which produces the oscillatory motion.
- Many of the known devices require a special construction which imply large production costs and storage space.
- the patent US3934283 uses two vibrator motors which are attached to opposite rail portions of the bed frame. This has the disadvantage of inducing the vibration to the whole bed structure including the legs and implicitly also the floor. This is prone to quick mechanical wear, which is not the case of the present invention that has the advantage of inducing the oscillatory motion through an actuator mechanism which decouples the fixed supporting structure which lies on the floor from the moving apparatus which connects to the bed frame.
- rocking devices for babies have the disadvantage of being applicable only to some particular types of cots, and assume that the cots have specific legs shape. This is the case of patents EP1900311 , US4793010 and WO2005084497 which assume that the cot legs would fit inside the rocking apparatus.
- the proposed invention has the advantage of being applicable also to any baby cot legs shape and size, by proposing a generic leg holder mechanism. Furthermore, unlike the proposed invention, the technical solutions adopted by these three existing patents are not suitable for the weight and size of an adult rocking bed.
- the object of the present invention is achieved by the rocking apparatus with the features of Claim 1, 3, 8, and the motion control method with the features of Claim 9.
- a primary object of the present invention is to provide a modular rocking apparatus, comprising of a support structure, which include four supporting legs, at least one of supporting legs including or being associated with a motion imparting mechanism.
- the leg with a motion imparting mechanism contains a support structure, an electric motor, a gear reducer coupled to the motor, a leadscrew rod which is coupled to the gear reducer, a moving block which contains a screw nut in which the leadscrew rod is accommodated, two guiding rods on which the moving block slides mounted on linear bearings, a frame supporting structure which is mounted on the moving block, a decorative housing, and a linkage assembly which is mounted on top of the decorative housing.
- the linkage assembly may be adjusted against the decorative housing in order to accommodate any bed frame shape and bed linkage mechanism.
- the motion is imparted by the assembly of the electric motor, gear reducer and leadscrew rod which form an actuator mechanism, and which transforms the electric motor rotation motion into a linear motion.
- the modular rocking apparatus may also use passive legs.
- the term "passive leg” as used throughout the specification imply any form of supporting structure which doesn't include a motion imparting mechanism, and which facilitates the continuation of the motion imparted by the motion imparting leg.
- the passive leg contains a support structure, a motion blocking mechanism which disables the leg free motion before the installation, a moving block which is coupled to the motion blocking mechanism, two guiding rods on which the moving block slides mounted on linear bearings, a frame supporting structure which is mounted on the moving block, a decorative housing, and a linkage assembly which is mounted on top of the decorative housing.
- the linkage assembly may be adjusted against the frame decorative housing in order to accommodate any bed frame shape, and bed linkage mechanism.
- two legs include or are associated with motion imparting means, and two legs are passive.
- Each motion imparting leg may be connected to a passive leg through one or more connecting rods.
- the rods are made of smaller segments with screws and nuts endings, which could accommodate several joints to form a variable length rod.
- This approach has the advantage that the variable length rods could fit any bed width.
- One of the rods is connected to the lower leg supporting structure which resides on the floor and the other rod is connected to the higher part of the leg which moves in an oscillatory manner.
- This mechanism that uses rods to transmit the rocking motion force from the motion imparting leg to a passive leg keeps the legs aligned and reduce the force which is applied to the bed frame.
- the rods are optional provided that the bed frame could handle the force generated by the motion imparting legs towards the passive legs, and the passive leg bases are not misaligned accidentally by the user during operation.
- the last is applicable to any adult or child bed size and shape.
- all the legs could be motion imparting legs.
- the motion imparted to the bed is an oscillating or reciprocating motion.
- the present invention provides an apparatus which comprise an electric motor driver for each electric motor, a microcontroller unit which synchronizes further all the electric motor drivers, and a pair of switches inside each leg which detect the end of the oscillatory motion path. These switches are triggered at the end of the motion path, and they command the rotation sense for all the motion imparting motors in a synchronous manner.
- the present invention provides a method for controlling the rocking bed apparatus activation, deactivation and motion parameters.
- the method comprises: firstly, the method determines whether the user lies down on the bed by the means of a weight sensor and at least one motion detector sensor, and secondly it sets the user desired rocking motion characteristics by the means of the apparatus control panel settings, or remotely from the settings at a terminal through a wireless or wired data network, or based on parameters derived from sensors which monitor the user temperature, heart rate, blood pressure and brain activity.
- the displacement of the rocking motion may be changed based on configuration commands which contain and are not limited to motion speed, rocking duration after the user falls asleep, and the total desired sleep duration after which the rocking motion is disabled.
- Another advantage and feature of the invention is the possibility to monitor remotely the user through the means of information provided by motion, temperature, heart rate, blood pressure and brain activity sensors. This could be applicable for monitoring infants, patients in hospitals, or elderly people in care homes.
- a rocking apparatus 10 for a bed 9 in accordance with the preferred embodiment of the present invention comprises two motion imparting legs 1, two passive legs 2, two pairs of rods which comprise multiple connected segments 4 and 5, a motion and communication control unit 6, two motion sensors 7, and the electric wires 8 which connect the motion imparting legs 1 and passive legs 2 to the motion and communication control unit 6.
- the last communicates with a data network 11 and other connected devices which are further described in relation to Fig. 27 .
- the motion imparting leg 1 includes a flat base 1.21, a decorative housing 1.24, and a linkage assembly 1.20 that is used for securing the bed frame to the motion imparting leg 1.
- the passive leg 2 includes a flat base 2.1, a decorative housing 2.13, and a linkage assembly 2.10 that is used for securing the bed frame to the passive leg 2.
- Each motion imparting leg 1 is connected to a passive leg 2 through two rods that include alternated segments which are ended on both ends with nuts 4, and segments ended on both ends with screws 5, that are screwed into each other in order to form any desired length, in accordance with any bed width.
- the segments 4 and 5 are secured and tightened together by the nuts 4.1.
- One of the rod assemblies keeps the lower part of the motion imparting legs base 1.21 equally spaced and aligned to the passive leg lower part 2.1.
- the other rod assembly keeps the motion imparting legs decorative housing 1.24 along with the upper moving mechanism, equally spaced and aligned to the passive leg upper moving mechanism and decorative housing 2.13.
- the rods coupling to the legs will become apparent from the following descriptions of Fig 5-10 , 13-18 , and 21-26 .
- the rocking apparatus 10 that comprises four motion imparting legs 1, a motion and communication control unit 6, two motion sensors 7, and the electric wires 8 which connect the motion imparting legs 1 to the motion and communication control unit 6.
- the last communicates with a data network 11 and other connected devices which are further described in relation to Fig. 28 .
- all the legs 1 contain a motion imparting mechanism, there is no need for connecting rods in between the legs 1, as all the last impart synchronously a rocking motion to the bed.
- the rocking apparatus 10 may use either the motion imparting legs 1 or 3.
- the motion imparting leg 1 comprises a flat base 1.21 which is welded to a rectangular pipe 1.12, that accommodates internally the motion imparting actuator and a supportive structure.
- the motion imparting mechanism comprise an electric motor 1.1 which is mounted on a U shape support structure 1.11, a worm gear reducer which includes a worm 1.2 mounted on the motor 1.1 shaft and a toothed wheel 1.4 mounted on the shaft of the leadscrew rod 1.5.
- the worm 1.2 is secured on the motor shaft by the screw 1.3
- the toothed wheel 1.4 is secured to the shaft of the leadscrew rod 1.5, by the screw 1.6.
- the leadscrew rod 1.5 is supported at both ends by the bearings 1.7 and 1.15.
- the leadscrew rod 1.5 is supported as well by the bearing 1.7 which is mounted on the side of the worm gear housing 1.14.
- the motion is imparted in a horizontal plane along the axis of the two supporting rods 1.10, by the transformation of the rotary motion of the leadscrew rod 1.5 into a linear motion induced to the moving block 1.8.
- the moving block 1.8 includes a nut threading which accommodates the leadscrew rod 1.5, two cylindrical housings for the linear bearings 1.9, and six threaded holes which accommodate the screws 1.32, 1.33 and 1.3 8.
- the linear bearings 1.9 slide along with the moving block 1.8 on the two supporting rods 1.10, in accordance with the motion induced by the rotation of the leadscrew rod 1.5.
- the supporting rods 1.10 are fastened on both sides against the U shape support structure 1.11 and the leg rectangular pipe 1.12 by the screws 1.13.
- the end of the oscillatory motion path is detected electronically by the means of two switches “single-pole, single-throw" (on or off) 1.22 which are mounted on the U shape support structure 1.11.
- On the lower side of the moving block 1.8 there are two perpendicular flat boards 1.23 arranged on opposite sides, that trigger the switches 1.22 when the moving block 1.8 reaches either end of the motion path.
- the switches 1.22 may be used only for the first round that the rocking apparatus imparts an oscillating motion. The subsequent oscillating motions don't need to use the switches 1.22 to detect the end of the movement path, as the control logic of the motion control unit 6 ( Fig. 1 ) stores in its memory the location of the switches 1.22. More information regarding the switches logic will be included further down in the motion control and communication unit 6 description.
- the motor 1.1 electric cables and the switches 1.22 electric cables are protected by a housing 1.29 which is mounted on the flat base 1.21.
- the housing 1.29 shields the electric cables for being tangled by the decorative housing 1.24 when the last moves against the flat base 1.21.
- the frame supporting structure 1.18 is mounted on the moving block 1.8 using the screws 1.38 (as seen in Fig. 7 ).
- the flat sheet 1.19 is welded to the frame supporting structure 1.18 in order to increase the last mechanical resistance.
- the decorative housing 1.24 wraps and hides the supporting structure 1.18 and the internal leg mechanism. As shown in Fig 9 , there is no physical contact between the decorative housing 1.24 and the leg lower side which includes the flat base 1.21, the electric cables housing 1.29 and the rectangular pipe 1.12.
- the oscillatory motion is imparted in a horizontal plane to the moving block 1.8, to the connected supporting structure 1.18, to the decorative housing 1.24, to the linkage assembly 1.20 and to the bolt 1.25.
- the bolt 1.25 is rigidly mounted on the supporting structure 1.18 and passes unobstructed through the decorative housing 1.24.
- the other bolt 1.30 is mounted onto the U shape support structure 1.11 and passes through the frame supporting structure 1.18 and the decorative housing 1.24. There is no physical contact between the bolt 1.30 and the frame supporting structure 1.18 and neither the decorative housing 1.24.
- the bolt 1.25 is connected to the leg 1 moving apparatus, and the bolt 1.30 is connected to the leg 1 static lower part.
- the legs connecting rods that comprise rod segments 4 may be screwed into the bolt 1.25 and tightened with the nut 4.1.
- the other connecting rod is screwed into the bolt 1.30.
- the connection between the motion imparting leg 1 and the passive leg 2 is done through the connecting rod segments 4 and 5 which keep the legs mobile and static parts synchronized.
- the linkage assembly 1.20 is tightened against the decorative housing 1.24 and the moving block 1.8 using the screws 1.32 and 1.33.
- the linkage assembly 1.20 comprise two parallel groove cuts which allow to adjust the linkage assembly 1.20 relative position against the decorative housing 1.24. By loosening the screws 1.32 and 1.33 the linkage assembly 1.20 may be moved inwards or outwards the leg's edge in order to match any bed frame width.
- Fig. 11 it discloses a generic supporting structure for holding an existing bed 9 leg, which could be applicable to a motion imparting leg or a passive leg.
- Some beds for adults and children have preassembled legs which could be mounted (as shown in Fig. 11 ) on a supporting structure 1.35 and 1.36.
- the supporting structure 1.35 replaces the existing supporting structure 1.18 ( Fig. 6 )
- 1.36 replaces 1.19 ( Fig. 6 ).
- the internal leg mechanism remains the same and implies that the moving block 1.8 is connected to the supporting structure 1.35 by the screws 1.32 and 1.33.
- the linkage mechanism accommodates any existing bed leg shape and size, by the means of an adjustable U shaped holder 1.37 which immobilize the existing leg against the supporting structure 1.36.
- the U shaped holder 1.37 may slide in and out the leg structure 1.35 and is fastened against the support structure 1.35 by four screws 1.34.
- FIG. 12 it discloses another linkage assembly embodiment 1.39 which could replace the above mentioned linkage assembly 1.20.
- This linkage assembly is applicable to the motion imparting legs 1 and 3, as well to the passive leg 2 and may connect any of them to bed frames which comprise a vertical flat surface.
- the linkage assembly 1.39 is tightened against the decorative housing 1.24 and the moving block 1.8 using the screws 1.32 and 1.33, in the same manner as the linkage assemblies 1.20.
- the passive leg 2 comprises a flat base 2.1 which is connected to a rectangular pipe 2.2 that accommodates internally a motion blocking mechanism and a supportive rocking structure.
- the connection between the flat base 2.1 and the rectangular pipe 2.2 comprises the bars 2.3 which accommodate for each bar 2.3 two buried screws 2.26 into the rectangular pipe 2.2, and one buried screw 2.26 into the flat base 2.1.
- the motion blocking mechanism comprise a U shape blocker 2.19, a friction pad 2.18 mounted on the U shape blocker 2.19, two compression springs 2.15 and 2.20 one on each side of the U shape blocker 2.19, and a spring blocker rod 2.21.
- the motion blocking mechanism has the role to block the free movement of the moving block 2.6 and implicitly the whole passive leg moving structure when the leg 2 is not installed.
- the U shape bar 2.19 endings pass freely through the flat base 2.1 and extend beyond the flat base 2.1 lower surface.
- the U shape bar 2.19 endings will be pushed upwards when the leg is installed on a floor flat surface.
- the springs 2.15 and 2.20 are compressed against the U support structure 2.30 and the spring blocker rod 2.21.
- the U shape blocker 2.19 When the passive leg is not installed, the U shape blocker 2.19 is pushed downwards in the direction of the flat base 2.1, which imply that the friction pad 2.18 blocks the moving block 2.6. After the installation, the U shape blocker 2.19 endings are pushed upwards to the same level as the flat base 2.1, which remove the contact between the friction pad 2.18 and the moving block 2.6.
- the moving block 2.6 includes a groove which accommodates the U shape bar 2.19 along with the friction pad 2.18, two cylindrical housings for the linear bearings 2.5, and six threaded holes which accommodate the screws 2.24, 2.28, and 2.29.
- the linear bearings 2.5 slide along with the moving block 2.6 on the two supporting rods 2.4.
- the supporting rods 2.4 are fastened on both sides against the U shape support structure 2.30 and the leg rectangular pipe 2.2 by the screws 2.7.
- the screw 2.25 secures further along with the screws 2.7 and the screw 2.23, the U shape support structure 2.30 against the rectangular pipe 2.2.
- the nut 2.32 screws into the bolt 2.22 and the nut 2.8 tightens the opposite side of the U shape support structure 2.30 against the rectangular pipe 2.2.
- the end of the oscillatory motion path is detected electronically by the means of two switches “single-pole, single-throw" (on or off) 2.11 which are mounted on the U shape support structure 2.30.
- switches "single-pole, single-throw” on or off
- On the lower side of the moving block 2.6 there are two perpendicular flat boards 2.12 arranged on opposite sides, that trigger the switches 2.11 when the moving block 2.6 reaches either end of the motion path.
- the switches 2.11 may be used only for the first round when the passive leg 2 starts to move.
- the subsequent oscillating motions don't need to use the switches 2.11 to detect the end of the movement path, as the control logic of the motion control unit 6 ( Fig. 1 ) stores in its memory the location of the switches 2.11.
- the switches 2.11 electric cables are protected by a housing 2.17 which is mounted on the flat base 2.1.
- the housing 2.17 is secured against the flat base 2.1 by two screws 2.27.
- the housing 2.17 shields the electric cables for being tangled by the decorative housing 2.13.
- the frame supporting structure 2.31 (see Fig. 14 ) is mounted on the moving block 2.6 using the screws 2.24, 2.28, and 2.29.
- the flat sheet 2.9 is welded to the frame supporting structure 2.31 in order to increase the last mechanical resistance.
- the decorative housing 2.13 wraps and hides the frame supporting structure 2.31 and the internal leg mechanism. As shown in Fig 17 , there is no physical contact between the decorative housing 2.13 and the leg lower side which includes the flat base 2.1, the electric cables housing 2.17, and the rectangular pipe 2.2.
- the oscillatory motion is transmitted from the motion imparting leg 1 or 3 to the passive leg 2 through the connecting rod segments 4 and 5 and further through the passive leg bolt 2.14.
- the motion is imparted further to the supporting structure 2.31, linkage assembly 2.10, the decorative housing 2.13, and the moving block 2.6.
- the bolt 2.16 is rigidly mounted on the frame supporting structure 2.31 and passes through the decorative housing 2.13.
- the bolt 2.22 is mounted onto the U shape support structure 2.22 using the nuts 2.23, 2.32 and passes unobstructed through the frame supporting structure 2.31 and the decorative housing 2.13. There is no physical contact between the bolt 2.21 and the frame supporting structure 2.31, and neither the decorative housing 2.13.
- the bolt 2.14 is connected to the leg 2 moving apparatus, and the bolt 2.22 is connected to the leg 2 static supporting structure.
- One of the legs connecting rods that comprise the rod segment 4 may be screwed into the bolt 2.14 and tightened with the nut 4.1.
- the other connecting rod is screwed into the bolt 2.22.
- the connection between the motion imparting leg 1 or 3 and the passive leg 2 is done through the connecting rod segments 4 and 5 which keep the legs mobile and static parts equally spaced and synchronized.
- the linkage assembly 2.10 is tightened against the decorative housing 2.13 and the moving block 2.6 using the screws 2.28 and 2.29.
- the linkage assembly 2.10 comprise two parallel groove cuts which allow to adjust the linkage assembly 2.10 relative position against the decorative housing 2.13. By loosening the screws 2.28 and 2.29 the linkage assembly 2.10 may be moved inwards or outwards the leg's edge in order to match any bed frame width.
- a weight sensor which comprises a flat polymer surface 2.40 which has the property of changing the electrical resistivity in function of the force which is applied to the polymer surface.
- the electrical resistivity is monitored by the motion control and communication unit 6, as indicated in Fig. 27-28 .
- the last monitors the resistivity differential value over time, and by this mean tracks whether the user lies or not in the bed.
- the term "weight sensor” as used throughout the specification implies an apparatus to detect the bed weight and comprise a polymer flat surface 2.40 mounted between the flat base 2.1 and an additional flat plate 2.34.
- the rectangular pipe 2.2 is mounted on top of the flat plate 2.34.
- the flat base 2.1, the flat polymer surface 2.40 and the flat plate 2.34 are tightened together using four screws 2.35.
- the weight sensor apparatus as described above is applicable as well to the motion imparting legs 1 or 3, if the rocking apparatus doesn't comprise passive legs, as it is the case of the embodiment disclosed in Fig. 4 .
- FIG. 21-26 there is illustrated an alternative motion imparting leg 3, which is similar to the leg 1 of Fig 5-12 , with the exception of the actuator mechanism which uses a timing pulley gear reducer.
- the motion imparting leg 3 comprises a flat base 3.1 which is connected to a rectangular pipe 3.2, that accommodates internally the motion imparting actuator mechanism and a motion supportive structure.
- the connection between the flat base 3.1 and the rectangular pipe 3.2 comprises the bars 3.3 which accommodate for each bar 3.3 two buried screws 3.31 into the rectangular pipe 3.2, and one buried screw 3.31 into the flat base 3.1.
- the motion imparting mechanism comprise an electric motor 3.6 which is mounted on a L shape support structure 3.5, a timing pulley gear reducer which includes a timing pulley 3.7 mounted on the motor 3.6 shaft, a timing belt 3.13, and a second timing pulley 3.12 mounted on the shaft of the leadscrew rod 3.11.
- the timing pulley 3.7 is secured on the motor shaft by the screw 3.41
- a second timing pulley 3.12 is secured to the shaft of the leadscrew rod 3.11, by the screw 3.28.
- the motor 3.6 is mounted using four screws 3.30 on the L shape support structure 3.5 which is mounted on the flat base 3.1 using four screws 3.33, four nuts 3.35 and four washers 3.46.
- the L shape support structure 3.5 lies between two layers of rubber 3.4, one underneath rubber layer 3.4 that reduces the motor 3.6 vibration towards the flat base 3.1, and an upper rubber layer 3.4 which reduces the motor 3.6 vibration towards the four washers 3.46, the screws 3.33, and the four nuts 3.35.
- the leadscrew rod 3.11 is supported at both ends by the bearings 3.43. These bearings are accommodated and secured by the U shape support structure 3.42. The motion is imparted in a horizontal plane along the axis of the two supporting rods 3.8, by the transformation of the rotary motion of the leadscrew rod 3.11 into a linear motion induced to the moving block 3.10.
- the moving block 3.10 includes a nut threading which accommodates the leadscrew rod 3.11, two cylindrical housings for the linear bearings 3.9, and seven threaded holes which accommodate the screws 3.27, 3.36, 3.37 and 3.45.
- the linear bearings 3.9 slide along with the moving block 3.10 on the two supporting rods 3.8, in accordance with the motion induced by the leadscrew rod 3.11.
- the supporting rods 3.8 are fastened on both sides against the U shape support structure 3.42 and the leg rectangular pipe 3.2 by the screws 3.14.
- the L shape support structure 3.40 supports as well the rods 3.8, and the first is connected to the U shape support structure 3.42 through the screws 3.38.
- the leadscrew rod 3.11 passes unobstructed through the L shape support structure 3.40.
- the end of the oscillatory motion path is detected electronically by the means of two switches “single-pole, single-throw” (on or off) 3.18 which are mounted on the U shape support structure 3.42.
- switches 3.18 On the lower side of the moving block 3.10 there are two perpendicular flat boards 3.19 arranged on opposite sides, that trigger the switches 3.18 when the moving block 3.10 reaches either end of the motion path.
- the switches 3.18 may be used only for the first round that the rocking apparatus imparts an oscillating motion.
- the subsequent oscillating motions don't need to use the switches 3.18 to detect the end of the movement path, as the control logic of the motion control unit 6 ( Fig. 1 ) stores in its memory the location of the switches 3.18. More information regarding the switches logic will be included further down in the motion control and communication unit 6 description.
- the motor 3.6 electric cables and the switches 3.18 electric cables are protected by a housing 3.24 ( Fig. 21 ) which is mounted on the flat base 3.1.
- the housing 3.24 is secured against the flat base 3.1 using two screws 3.32, and shields the electric cables against being tangled by the decorative housing 3.20.
- the frame supporting structure 3.39 is mounted on the moving block 3.10 using the screws 3.27, 3.36, 3.37 and 3.45.
- the flat sheet 3.16 is welded to the frame supporting structure 3.39 in order to increase the last mechanical resistance.
- the decorative housing 3.20 wraps and hides the frame supporting structure 3.39 and the internal leg mechanism. As shown in Fig 25 , there is no physical contact between the decorative housing 3.20 and the leg lower side which includes the flat base 3.1, the electric cables housing 3.24, and the rectangular pipe 3.2.
- the oscillatory motion is imparted in a horizontal plane to the moving block 3.10, to the connected supporting structure 3.39, to the decorative housing 3.20, to the linkage assembly 3.17 and to the bolt 3.21.
- the bolt 3.21 is rigidly mounted on the frame supporting structure 3.39 and passes through the decorative housing 3.20.
- the bolt 3.25 is mounted onto the U shape support structure 3.42 using the nut 3.26 and passes unobstructed through the frame supporting structure 3.39 and the decorative housing 3.20. There is no physical contact between the bolt 3.25 and the frame supporting structure 3.39, and neither the decorative housing 3.20.
- the bolt 3.21 is connected to the leg 3 moving apparatus and the bolt 3.25 is connected to the leg 3 static structure.
- One of the legs connecting rods that comprise the rod segment 4 may be screwed into the bolt 3.21 and tightened with the nut 4.1.
- the other connecting rod is screwed into the bolt 3.25.
- the connection between the motion imparting leg 3 and the passive leg 2 is done through connecting rod segments 4 and 5, which keep the legs mobile and static parts synchronized.
- the linkage assembly 3.17 ( Fig. 21 ) is tightened against the decorative housing 3.20 and the moving block 3.10 using the screws 3.36 and 3.37.
- the linkage assembly 3.17 comprise two parallel groove cuts which allow to adjust the linkage assembly 3.17 relative position against the decorative housing 3.20. By loosening the screws 3.36 and 3.37 the linkage assembly 3.17 may be moved inwards or outwards the leg's edge in order to match any bed frame width.
- the motion imparting leg 3 may replace the motion imparting leg 1 in any of the present invention embodiments.
- FIG. 27 it shows the electrical block schematic of the preferred embodiment of the modular rocking bed system.
- the last corresponds to the apparatus disclosed in the Figs. 1-3 and comprises two motion imparting legs 1, two passive legs 2, the motion control and communication unit 6, a data communication network 11, motion sensors 7, 16, a weight sensor 2.40, a passive infrared sensor (PIR) 16, a headband brain activity sensor 15, a wrist temperature, heart rate and blood pressure sensor 12, and a user terminal 13.
- the electrical parts of the motion imparting leg 1 are the motor 1.1 and two switches 1.22.
- the electrical parts of the passive leg 2 are the two switches 2.11.
- the motion control and communication unit 6 comprise two motor drivers 6.7, a network data communication module 6.2, a microcontroller 6.1, three potentiometers 6.3, 6.4, 6.5, and a switch 6.6.
- the motion control and communication unit 6 is connected to two motion imparting legs 1, two passive legs 2, two motion sensors 7, and the weight sensor 2.40.
- the weight sensor 2.40 may be part of a motion imparting leg 1, 3, or a passive leg 2. In this schematic it is part of the passive leg 2.
- the electric motors 1.1 are controlled by the motor drivers 6.7, that are part of the motion control and communication unit 6.
- the microcontroller 6.1 maintains the synchronization between the motors 1.1 through a motion control software. The last ensures that both motors 1.1 instantaneous speed and implicitly the relative distance between all the legs moving parts is maintained constant at any time.
- the oscillatory rocking motion is achieved by changing the motors 1.1 rotation sense at the end of the motion path.
- the last is bordered by the switches 1.22 and 2.11.
- the switches 1.22 detect the end of the motion paths for the legs 1 and the switches 2.11 detect the end of the motion path for the legs 2.
- the microcontroller 6.1 detects whether any of them is triggered on a given motion path, that imply the end of the motion path is reached.
- the motors 1.1 are stopped and the last rotation is reversed. Subsequently the rocking apparatus starts to move in the opposite direction until the switches 1.22 and 2.11 are triggered again at the other end of the motion path.
- the switches may be used only for the first round that the rocking apparatus imparts an oscillating motion. The subsequent oscillating motions don't need to use the switches to detect the end of the oscillation path, as the control logic of the motion control unit 6 stores in its memory the switches location.
- the motion control and communication unit 6 provides the basic user controls for the rocking motion system.
- the controls comprise the potentiometer 6.3 that controls the rocking speed, the potentiometer 6.4 that controls the amount of time after which the rocking motion ceases following a state of no motion from the motion sensors, the potentiometer 6.5 that controls the total expected sleep duration after which the rocking motion is disabled, and a switch 6.6 which forces the rocking motion activation or deactivation. Further details related to the user controls usage are explained in relation to Fig 29 .
- the user controls 6.3, 6.4, 6.6 may be overridden by an application which runs on the terminal 13, along with other user customized controls.
- the application that runs on the terminal 13 may include a sleep tracking functionality, and a database that contains the history of the sleep and the motion related data over a period of time.
- the motion sensors 7, 16, along with the temperature, heart rate, blood pressure sensor 12, and the brain activity sensor 15 are used to track the user status, in relation to sleep and alertness.
- the weight sensor 2.40 uses a method which measures the differential of the total bed weight over time, and based on that detects whether the user lies or not on the bed. This information along with the user settings is used for starting and stopping the rocking motion in an automated way.
- the present invention doesn't limit the type of sensors which may be used for tracking the user status. Further details regarding the relation between the information provided by the motion, temperature, heart rate, blood pressure and weight sensors, and the induced rocking motion are explained in relation to Fig. 29 .
- Fig. 28 shows the electrical block schematic of the second embodiment of the modular rocking bed system.
- the last corresponds to the apparatus disclosed in the Fig. 4 and comprise four motion imparting legs 1, the motion control and communication unit 6, a data communication network 11, motion sensors 7, a weight sensor 2.40, a passive infrared sensor (PIR) 16, a headband brain activity sensor 15, a wrist temperature, heart rate and blood pressure sensor 12, and a user terminal 13.
- the motion control and communication unit 6 comprise four motor drivers 6.7, one corresponding to each of the motion imparting leg motors 1.1.
- the microcontroller 6.1 maintains the synchronization between the motors 1.1 through a motion control software. The last ensures that all the four motors 1.1 instantaneous speed and implicitly the relative distance between the legs moving parts is maintained constant at any time.
- the remaining blocks and system functionality in Fig. 28 is identical to the one described in relation to Fig. 27 .
- the method detects whether the bed total weight has increased or the user 14 switches on manually the bed rocking movement using the switch 6.6 (100).
- bed total weight as used throughout the specification imply the sum of the bed and the user weights.
- the bed total weight is monitored by the weight sensor 2.40, and the assumption is that when the user 14 lies on the bed 9, the last total weight increases. This triggers the notification that the user lies on the bed and afterward, the bed starts to move on a predefined direction, which imply that all the motion imparting legs will start to push the bed in the same direction (102).
- the method detects whether the bed total weight has decreased, or the user switched off manually the bed rocking using the switch 6.6, or there is no user motion detected using the motion sensors 7, 16 for a predefined time set by the potentiometer 6.4, or the total desired sleep time set by the potentiometer 6.5 elapsed (104). If not so, the method detects further whether any of the switches 1.22 or 2.11 or 3.18 have been triggered (106). The switches are triggered at the end of the current moving direction path which imply that the moving direction has to be changed (110). The switches index 1.22, 2.11 and 3.18 correspond to all the possible legs 1 or 2 or 3 that could be part of the rocking apparatus. It is understood that depending on a particular instantiation, some of the switches 1.22, 2.11 or 3.18 might not be part of the system.
- the method executes the bed 9 rocking motion by looping back to state (102) until any of the conditions in state (104) are true. In that case the bed stops the movement (108) and gets back into the mode (100).
- the flowchart discloses a simplified rocking bed state machine that doesn't cover complex scenarios which imply and are not limited to user defined controls, motion or oscillation patterns which use the information provided by motion sensors 7, 16, temperature, heart rate and blood pressure sensors 12, brain activity sensors 15, or settings from an application running on a control terminal 13.
- Another important method for controlling the bed 9 rocking motion characteristics consists in using the periodicity and level information of the wave signals that are captured by one or more brain activity sensors 15, for setting and synchronizing the bed 9 oscillatory motion periodicity and speed.
Landscapes
- Invalid Beds And Related Equipment (AREA)
Abstract
A modular rocking device (10) which can be used in conjunction with an existing bed or cot (9), without structural alteration of the same, to enable the later to be rocked. The modular rocking device (10) comprises two motion imparting legs (1, 3), two passive legs (2), two pairs of connecting rods (4, 5) and a motion and communication control unit (6). The oscillatory motion is generated within the supporting legs (1, 3) in a horizontal plane using an actuator mechanism which comprise a worm gear reducer (1.2, 1.4), or a timing pulley gear reducer (3.7, 3.12, 3.13). Motion sensors (7, 16), temperature, heart rate, blood pressure sensors (12), brain activity sensors (15), and weight sensors (2.40) detect the user presence and sleep status, and activate the rocking motion using an automated method. The motion parameters are user configurable through a control panel (6), or remotely from a terminal (13) connected to a data communication network (11).
Description
- This invention relates to rocking mechanisms for beds, cribs, and the like, and more particularly to an apparatus and a method of controlling the same, which imparts an oscillatory movement in a horizontal plane.
- The invention also relates to a device for automatically moving at least one piece of furniture, wherein the device is connected in a detachable manner to the piece of furniture.
- The present invention uses modular supporting legs which can be readily attached to a standard bed frame without altering the last. Furthermore, specifically to the object of the invention, the bed oscillatory motion is generated within the supporting legs.
- The oscillatory motion may be activated, deactivated and parameterized based on the user sleep status in an automated manner using motion, temperature, heart rate, blood pressure, brain activity and weight sensors. The oscillatory motion characteristics are also user configurable through a control panel, or remotely from a terminal connected to a data communication network.
- It is well known that a slow oscillatory motion applied to a bed for adults or babies induces sleep, and a calming effect as well. A rocking or swinging bed may also help those with sleep disorders to achieve a full night sleep without the need of using medication.
- The rocking beds main technical problem is the size and complexity of the device which produces the oscillatory motion. Many of the known devices require a special construction which imply large production costs and storage space.
- Nevertheless, most of the rocking beds replicate the gentle swaying of a boat at sea, either through the means of a slow oscillatory mechanism or inducing a vibration.
- The
patent US3934283 uses two vibrator motors which are attached to opposite rail portions of the bed frame. This has the disadvantage of inducing the vibration to the whole bed structure including the legs and implicitly also the floor. This is prone to quick mechanical wear, which is not the case of the present invention that has the advantage of inducing the oscillatory motion through an actuator mechanism which decouples the fixed supporting structure which lies on the floor from the moving apparatus which connects to the bed frame. - The
patents US8856982 and TWM360624 have the advantage of a large degree of movement but imply a very large and complex mechanical structure. Similarly, thepatent US2007094792 uses two support structures which have the disadvantage of being large and heavy. The proposed invention has the advantage of a small hardware footprint which can be easily stored and shipped at low costs, by the means of a medium size parcel. - Some of the rocking devices for babies have the disadvantage of being applicable only to some particular types of cots, and assume that the cots have specific legs shape. This is the case of
patents EP1900311 ,US4793010 andWO2005084497 which assume that the cot legs would fit inside the rocking apparatus. The proposed invention has the advantage of being applicable also to any baby cot legs shape and size, by proposing a generic leg holder mechanism. Furthermore, unlike the proposed invention, the technical solutions adopted by these three existing patents are not suitable for the weight and size of an adult rocking bed. - The object of the present invention is achieved by the rocking apparatus with the features of
Claim Claim 9. - Accordingly, a primary object of the present invention is to provide a modular rocking apparatus, comprising of a support structure, which include four supporting legs, at least one of supporting legs including or being associated with a motion imparting mechanism.
- The leg with a motion imparting mechanism contains a support structure, an electric motor, a gear reducer coupled to the motor, a leadscrew rod which is coupled to the gear reducer, a moving block which contains a screw nut in which the leadscrew rod is accommodated, two guiding rods on which the moving block slides mounted on linear bearings, a frame supporting structure which is mounted on the moving block, a decorative housing, and a linkage assembly which is mounted on top of the decorative housing. The linkage assembly may be adjusted against the decorative housing in order to accommodate any bed frame shape and bed linkage mechanism. The motion is imparted by the assembly of the electric motor, gear reducer and leadscrew rod which form an actuator mechanism, and which transforms the electric motor rotation motion into a linear motion.
- The modular rocking apparatus may also use passive legs. The term "passive leg" as used throughout the specification imply any form of supporting structure which doesn't include a motion imparting mechanism, and which facilitates the continuation of the motion imparted by the motion imparting leg. The passive leg contains a support structure, a motion blocking mechanism which disables the leg free motion before the installation, a moving block which is coupled to the motion blocking mechanism, two guiding rods on which the moving block slides mounted on linear bearings, a frame supporting structure which is mounted on the moving block, a decorative housing, and a linkage assembly which is mounted on top of the decorative housing. The linkage assembly may be adjusted against the frame decorative housing in order to accommodate any bed frame shape, and bed linkage mechanism.
- In a preferred form of the modular rocking apparatus, two legs include or are associated with motion imparting means, and two legs are passive. Each motion imparting leg may be connected to a passive leg through one or more connecting rods. The rods are made of smaller segments with screws and nuts endings, which could accommodate several joints to form a variable length rod. This approach has the advantage that the variable length rods could fit any bed width. One of the rods is connected to the lower leg supporting structure which resides on the floor and the other rod is connected to the higher part of the leg which moves in an oscillatory manner. This mechanism that uses rods to transmit the rocking motion force from the motion imparting leg to a passive leg keeps the legs aligned and reduce the force which is applied to the bed frame. The rods are optional provided that the bed frame could handle the force generated by the motion imparting legs towards the passive legs, and the passive leg bases are not misaligned accidentally by the user during operation.
- Advantageously, due to the modular nature of the proposed apparatus, the last is applicable to any adult or child bed size and shape. In the case of large and heavy beds which require larger rocking forces, all the legs could be motion imparting legs. In this case it is not necessary to use the connecting rods between the legs, as all the legs impart a synchronous motion, which is synchronized electronically by the electric motor drivers and the motion control unit.
- The motion imparted to the bed is an oscillating or reciprocating motion.
- In order to achieve the objective mentioned above, the present invention provides an apparatus which comprise an electric motor driver for each electric motor, a microcontroller unit which synchronizes further all the electric motor drivers, and a pair of switches inside each leg which detect the end of the oscillatory motion path. These switches are triggered at the end of the motion path, and they command the rotation sense for all the motion imparting motors in a synchronous manner.
- As will be more particularly described below, the present invention provides a method for controlling the rocking bed apparatus activation, deactivation and motion parameters. The method comprises: firstly, the method determines whether the user lies down on the bed by the means of a weight sensor and at least one motion detector sensor, and secondly it sets the user desired rocking motion characteristics by the means of the apparatus control panel settings, or remotely from the settings at a terminal through a wireless or wired data network, or based on parameters derived from sensors which monitor the user temperature, heart rate, blood pressure and brain activity. The displacement of the rocking motion may be changed based on configuration commands which contain and are not limited to motion speed, rocking duration after the user falls asleep, and the total desired sleep duration after which the rocking motion is disabled.
- Another advantage and feature of the invention is the possibility to monitor remotely the user through the means of information provided by motion, temperature, heart rate, blood pressure and brain activity sensors. This could be applicable for monitoring infants, patients in hospitals, or elderly people in care homes.
- Further benefits and advantages of the present invention will become apparent after a careful reading of the detailed description with appropriate reference to the accompanying drawings.
- The features of the invention believed to be novel are set forth with particularity in the appended claims. The invention itself, however, may be best understood by reference to the following detailed description of the invention, which describes an exemplary embodiment of the invention, taken in conjunction with the accompanying drawings, in which:
-
Fig. 1 is a perspective view of the rocking apparatus in accordance with the preferred embodiment of the present invention. -
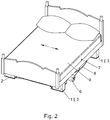
Fig. 2 is a perspective view of a bed mounted on the rocking apparatus in accordance with the preferred embodiment of the present invention. -
Fig. 3 is a perspective view of a transparent bed mounted on the rocking apparatus in accordance with the preferred embodiment of the present invention. -
Fig. 4 is a perspective view of the rocking apparatus in accordance with the second embodiment of the present invention. -
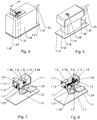
Fig. 5 is a perspective view of the preferred embodiment of the motion imparting leg. -
Fig. 6 is a perspective view of the preferred embodiment of the motion imparting leg, without the linkage assembly and the decorative housing. -
Fig. 7 is a perspective internal view of the preferred embodiment of the motion imparting leg. -
Fig. 8 is a further internal view of the preferred embodiment of the motion imparting leg. -
Fig. 9 is a side view of the preferred embodiment of the motion imparting leg. -
Fig. 10 is a perspective section view of the preferred embodiment of the motion imparting leg. -
Fig. 11 is a perspective view of a supporting structure for holding an existing bed leg to be used in conjunction to the present invention motion imparting or passive leg. -
Fig. 12 is a perspective view of a second embodiment of the linkage assembly for the motion imparting leg. -
Fig. 13 is a perspective view of the preferred embodiment of the passive leg. -
Fig. 14 is a perspective view of the preferred embodiment of the passive leg, without the linkage assembly and the decorative housing. -
Fig. 15 is a perspective internal view of the preferred embodiment of the passive leg. -
Fig. 16 is a further internal view of the preferred embodiment of the passive leg. -
Fig. 17 is a side view of the preferred embodiment of the passive leg. -
Fig. 18 is a perspective section view of the preferred embodiment of the passive leg. -
Fig. 19 is a perspective internal view of the passive leg which includes the weight sensor. -
Fig. 20 is a transparent internal view of the passive leg which includes the weight sensor. -
Fig. 21 is a perspective view of the second embodiment of the motion imparting leg. -
Fig. 22 is a perspective view of the second embodiment of the motion imparting leg, without the linkage assembly and the decorative housing. -
Fig. 23 is a perspective internal view of the second embodiment of the motion imparting leg. -
Fig. 24 is a further internal view of the second embodiment of the motion imparting leg. -
Fig. 25 is a side view of the second embodiment of the motion imparting leg. -
Fig. 26 is a perspective section view of the second embodiment of the motion imparting leg. -
Fig. 27 is an electrical block schematic of the preferred embodiment for the modular rocking bed system. -
Fig. 28 is an electrical block schematic of the second embodiment for the modular rocking bed system. -
Fig. 29 is a flowchart of the rocking bed motion state machine. - In cooperation with attached drawings, the technical contents and detailed description of the present invention are described thereinafter according to a preferable embodiment, being not used to limit its executive scope. Any equivalent variation and modification made according to appended claims is all covered by the claims claimed by the present invention.
- Referring to the drawings and initially to
Figs. 1-3 , a rockingapparatus 10 for abed 9 in accordance with the preferred embodiment of the present invention comprises twomotion imparting legs 1, twopassive legs 2, two pairs of rods which comprise multiple connectedsegments communication control unit 6, twomotion sensors 7, and theelectric wires 8 which connect themotion imparting legs 1 andpassive legs 2 to the motion andcommunication control unit 6. The last communicates with adata network 11 and other connected devices which are further described in relation toFig. 27 . - As illustrated in the
Fig. 1 themotion imparting leg 1 includes a flat base 1.21, a decorative housing 1.24, and a linkage assembly 1.20 that is used for securing the bed frame to themotion imparting leg 1. Thepassive leg 2 includes a flat base 2.1, a decorative housing 2.13, and a linkage assembly 2.10 that is used for securing the bed frame to thepassive leg 2. Eachmotion imparting leg 1 is connected to apassive leg 2 through two rods that include alternated segments which are ended on both ends withnuts 4, and segments ended on both ends withscrews 5, that are screwed into each other in order to form any desired length, in accordance with any bed width. Thesegments Fig 5-10 ,13-18 , and21-26 . - Referring to the drawing in the
Fig. 4 , it discloses the second embodiment of the present invention which is the rockingapparatus 10 that comprises fourmotion imparting legs 1, a motion andcommunication control unit 6, twomotion sensors 7, and theelectric wires 8 which connect themotion imparting legs 1 to the motion andcommunication control unit 6. The last communicates with adata network 11 and other connected devices which are further described in relation toFig. 28 . Given that in this embodiment all thelegs 1 contain a motion imparting mechanism, there is no need for connecting rods in between thelegs 1, as all the last impart synchronously a rocking motion to the bed. The rockingapparatus 10 may use either themotion imparting legs - Referring to the drawings in
Fig. 5-10 , themotion imparting leg 1 comprises a flat base 1.21 which is welded to a rectangular pipe 1.12, that accommodates internally the motion imparting actuator and a supportive structure. The motion imparting mechanism comprise an electric motor 1.1 which is mounted on a U shape support structure 1.11, a worm gear reducer which includes a worm 1.2 mounted on the motor 1.1 shaft and a toothed wheel 1.4 mounted on the shaft of the leadscrew rod 1.5. The worm 1.2 is secured on the motor shaft by the screw 1.3, and the toothed wheel 1.4 is secured to the shaft of the leadscrew rod 1.5, by the screw 1.6. The leadscrew rod 1.5 is supported at both ends by the bearings 1.7 and 1.15. These bearings are accommodated and secured by the U shape support structure 1.11. The leadscrew rod 1.5 is supported as well by the bearing 1.7 which is mounted on the side of the worm gear housing 1.14. The motion is imparted in a horizontal plane along the axis of the two supporting rods 1.10, by the transformation of the rotary motion of the leadscrew rod 1.5 into a linear motion induced to the moving block 1.8. The moving block 1.8 includes a nut threading which accommodates the leadscrew rod 1.5, two cylindrical housings for the linear bearings 1.9, and six threaded holes which accommodate the screws 1.32, 1.33 and 1.3 8. The linear bearings 1.9 slide along with the moving block 1.8 on the two supporting rods 1.10, in accordance with the motion induced by the rotation of the leadscrew rod 1.5. The supporting rods 1.10 are fastened on both sides against the U shape support structure 1.11 and the leg rectangular pipe 1.12 by the screws 1.13. The end of the oscillatory motion path is detected electronically by the means of two switches "single-pole, single-throw" (on or off) 1.22 which are mounted on the U shape support structure 1.11. On the lower side of the moving block 1.8 there are two perpendicular flat boards 1.23 arranged on opposite sides, that trigger the switches 1.22 when the moving block 1.8 reaches either end of the motion path. The switches 1.22 may be used only for the first round that the rocking apparatus imparts an oscillating motion. The subsequent oscillating motions don't need to use the switches 1.22 to detect the end of the movement path, as the control logic of the motion control unit 6 (Fig. 1 ) stores in its memory the location of the switches 1.22. More information regarding the switches logic will be included further down in the motion control andcommunication unit 6 description. - The motor 1.1 electric cables and the switches 1.22 electric cables are protected by a housing 1.29 which is mounted on the flat base 1.21. The housing 1.29 shields the electric cables for being tangled by the decorative housing 1.24 when the last moves against the flat base 1.21.
- The frame supporting structure 1.18 is mounted on the moving block 1.8 using the screws 1.38 (as seen in
Fig. 7 ). The flat sheet 1.19 is welded to the frame supporting structure 1.18 in order to increase the last mechanical resistance. The decorative housing 1.24 wraps and hides the supporting structure 1.18 and the internal leg mechanism. As shown inFig 9 , there is no physical contact between the decorative housing 1.24 and the leg lower side which includes the flat base 1.21, the electric cables housing 1.29 and the rectangular pipe 1.12. - The oscillatory motion is imparted in a horizontal plane to the moving block 1.8, to the connected supporting structure 1.18, to the decorative housing 1.24, to the linkage assembly 1.20 and to the bolt 1.25. The bolt 1.25 is rigidly mounted on the supporting structure 1.18 and passes unobstructed through the decorative housing 1.24. The other bolt 1.30 is mounted onto the U shape support structure 1.11 and passes through the frame supporting structure 1.18 and the decorative housing 1.24. There is no physical contact between the bolt 1.30 and the frame supporting structure 1.18 and neither the decorative housing 1.24.
- The bolt 1.25 is connected to the
leg 1 moving apparatus, and the bolt 1.30 is connected to theleg 1 static lower part. The legs connecting rods that comprise rod segments 4 (seeFig. 1 ) may be screwed into the bolt 1.25 and tightened with the nut 4.1. The other connecting rod is screwed into the bolt 1.30. As mentioned above, the connection between themotion imparting leg 1 and thepassive leg 2 is done through the connectingrod segments - The linkage assembly 1.20 is tightened against the decorative housing 1.24 and the moving block 1.8 using the screws 1.32 and 1.33. The linkage assembly 1.20 comprise two parallel groove cuts which allow to adjust the linkage assembly 1.20 relative position against the decorative housing 1.24. By loosening the screws 1.32 and 1.33 the linkage assembly 1.20 may be moved inwards or outwards the leg's edge in order to match any bed frame width.
- Referring to the drawing in
Fig. 11 , it discloses a generic supporting structure for holding an existingbed 9 leg, which could be applicable to a motion imparting leg or a passive leg. Some beds for adults and children have preassembled legs which could be mounted (as shown inFig. 11 ) on a supporting structure 1.35 and 1.36. In this case the supporting structure 1.35 replaces the existing supporting structure 1.18 (Fig. 6 ), and 1.36 replaces 1.19 (Fig. 6 ). The internal leg mechanism remains the same and implies that the moving block 1.8 is connected to the supporting structure 1.35 by the screws 1.32 and 1.33. There is no decorative housing in this apparatus, and the supporting structure 1.35 is welded to the supporting structure 1.36. The linkage mechanism accommodates any existing bed leg shape and size, by the means of an adjustable U shaped holder 1.37 which immobilize the existing leg against the supporting structure 1.36. The U shaped holder 1.37 may slide in and out the leg structure 1.35 and is fastened against the support structure 1.35 by four screws 1.34. - Referring to the drawing in
Fig. 12 , it discloses another linkage assembly embodiment 1.39 which could replace the above mentioned linkage assembly 1.20. This linkage assembly is applicable to themotion imparting legs passive leg 2 and may connect any of them to bed frames which comprise a vertical flat surface. The linkage assembly 1.39 is tightened against the decorative housing 1.24 and the moving block 1.8 using the screws 1.32 and 1.33, in the same manner as the linkage assemblies 1.20. - Referring to the drawings in
Fig. 13-18 , thepassive leg 2 comprises a flat base 2.1 which is connected to a rectangular pipe 2.2 that accommodates internally a motion blocking mechanism and a supportive rocking structure. The connection between the flat base 2.1 and the rectangular pipe 2.2 comprises the bars 2.3 which accommodate for each bar 2.3 two buried screws 2.26 into the rectangular pipe 2.2, and one buried screw 2.26 into the flat base 2.1. - The motion blocking mechanism comprise a U shape blocker 2.19, a friction pad 2.18 mounted on the U shape blocker 2.19, two compression springs 2.15 and 2.20 one on each side of the U shape blocker 2.19, and a spring blocker rod 2.21. The motion blocking mechanism has the role to block the free movement of the moving block 2.6 and implicitly the whole passive leg moving structure when the
leg 2 is not installed. The U shape bar 2.19 endings pass freely through the flat base 2.1 and extend beyond the flat base 2.1 lower surface. The U shape bar 2.19 endings will be pushed upwards when the leg is installed on a floor flat surface. The springs 2.15 and 2.20 are compressed against the U support structure 2.30 and the spring blocker rod 2.21. When the passive leg is not installed, the U shape blocker 2.19 is pushed downwards in the direction of the flat base 2.1, which imply that the friction pad 2.18 blocks the moving block 2.6. After the installation, the U shape blocker 2.19 endings are pushed upwards to the same level as the flat base 2.1, which remove the contact between the friction pad 2.18 and the moving block 2.6. - The moving block 2.6 includes a groove which accommodates the U shape bar 2.19 along with the friction pad 2.18, two cylindrical housings for the linear bearings 2.5, and six threaded holes which accommodate the screws 2.24, 2.28, and 2.29. The linear bearings 2.5 slide along with the moving block 2.6 on the two supporting rods 2.4. The supporting rods 2.4 are fastened on both sides against the U shape support structure 2.30 and the leg rectangular pipe 2.2 by the screws 2.7. The screw 2.25 secures further along with the screws 2.7 and the screw 2.23, the U shape support structure 2.30 against the rectangular pipe 2.2. The nut 2.32 screws into the bolt 2.22 and the nut 2.8 tightens the opposite side of the U shape support structure 2.30 against the rectangular pipe 2.2.
- The end of the oscillatory motion path is detected electronically by the means of two switches "single-pole, single-throw" (on or off) 2.11 which are mounted on the U shape support structure 2.30. On the lower side of the moving block 2.6 there are two perpendicular flat boards 2.12 arranged on opposite sides, that trigger the switches 2.11 when the moving block 2.6 reaches either end of the motion path. The switches 2.11 may be used only for the first round when the
passive leg 2 starts to move. The subsequent oscillating motions don't need to use the switches 2.11 to detect the end of the movement path, as the control logic of the motion control unit 6 (Fig. 1 ) stores in its memory the location of the switches 2.11. More information regarding the switches logic will be included further down in the motion control andcommunication unit 6 description. The switches 2.11 electric cables are protected by a housing 2.17 which is mounted on the flat base 2.1. The housing 2.17 is secured against the flat base 2.1 by two screws 2.27. The housing 2.17 shields the electric cables for being tangled by the decorative housing 2.13. - The frame supporting structure 2.31 (see
Fig. 14 ) is mounted on the moving block 2.6 using the screws 2.24, 2.28, and 2.29. The flat sheet 2.9 is welded to the frame supporting structure 2.31 in order to increase the last mechanical resistance. The decorative housing 2.13 wraps and hides the frame supporting structure 2.31 and the internal leg mechanism. As shown inFig 17 , there is no physical contact between the decorative housing 2.13 and the leg lower side which includes the flat base 2.1, the electric cables housing 2.17, and the rectangular pipe 2.2. - The oscillatory motion is transmitted from the
motion imparting leg passive leg 2 through the connectingrod segments - The bolt 2.14 is connected to the
leg 2 moving apparatus, and the bolt 2.22 is connected to theleg 2 static supporting structure. One of the legs connecting rods that comprise the rod segment 4 (seeFig. 1 ) may be screwed into the bolt 2.14 and tightened with the nut 4.1. The other connecting rod is screwed into the bolt 2.22. As mentioned above, the connection between themotion imparting leg passive leg 2 is done through the connectingrod segments - The linkage assembly 2.10 is tightened against the decorative housing 2.13 and the moving block 2.6 using the screws 2.28 and 2.29. The linkage assembly 2.10 comprise two parallel groove cuts which allow to adjust the linkage assembly 2.10 relative position against the decorative housing 2.13. By loosening the screws 2.28 and 2.29 the linkage assembly 2.10 may be moved inwards or outwards the leg's edge in order to match any bed frame width.
- Referring to the drawing in
Fig. 19-20 , they disclose a weight sensor, which comprises a flat polymer surface 2.40 which has the property of changing the electrical resistivity in function of the force which is applied to the polymer surface. The electrical resistivity is monitored by the motion control andcommunication unit 6, as indicated inFig. 27-28 . The last monitors the resistivity differential value over time, and by this mean tracks whether the user lies or not in the bed. The term "weight sensor" as used throughout the specification implies an apparatus to detect the bed weight and comprise a polymer flat surface 2.40 mounted between the flat base 2.1 and an additional flat plate 2.34. The rectangular pipe 2.2 is mounted on top of the flat plate 2.34. The flat base 2.1, the flat polymer surface 2.40 and the flat plate 2.34 are tightened together using four screws 2.35. The weight sensor apparatus as described above is applicable as well to themotion imparting legs Fig. 4 . - Referring to the drawings in
Figs. 21-26 , there is illustrated an alternativemotion imparting leg 3, which is similar to theleg 1 ofFig 5-12 , with the exception of the actuator mechanism which uses a timing pulley gear reducer. Themotion imparting leg 3 comprises a flat base 3.1 which is connected to a rectangular pipe 3.2, that accommodates internally the motion imparting actuator mechanism and a motion supportive structure. The connection between the flat base 3.1 and the rectangular pipe 3.2 comprises the bars 3.3 which accommodate for each bar 3.3 two buried screws 3.31 into the rectangular pipe 3.2, and one buried screw 3.31 into the flat base 3.1. The motion imparting mechanism comprise an electric motor 3.6 which is mounted on a L shape support structure 3.5, a timing pulley gear reducer which includes a timing pulley 3.7 mounted on the motor 3.6 shaft, a timing belt 3.13, and a second timing pulley 3.12 mounted on the shaft of the leadscrew rod 3.11. The timing pulley 3.7 is secured on the motor shaft by the screw 3.41, and a second timing pulley 3.12 is secured to the shaft of the leadscrew rod 3.11, by the screw 3.28. The motor 3.6 is mounted using four screws 3.30 on the L shape support structure 3.5 which is mounted on the flat base 3.1 using four screws 3.33, four nuts 3.35 and four washers 3.46. The L shape support structure 3.5 lies between two layers of rubber 3.4, one underneath rubber layer 3.4 that reduces the motor 3.6 vibration towards the flat base 3.1, and an upper rubber layer 3.4 which reduces the motor 3.6 vibration towards the four washers 3.46, the screws 3.33, and the four nuts 3.35. - The leadscrew rod 3.11 is supported at both ends by the bearings 3.43. These bearings are accommodated and secured by the U shape support structure 3.42. The motion is imparted in a horizontal plane along the axis of the two supporting rods 3.8, by the transformation of the rotary motion of the leadscrew rod 3.11 into a linear motion induced to the moving block 3.10. The moving block 3.10 includes a nut threading which accommodates the leadscrew rod 3.11, two cylindrical housings for the linear bearings 3.9, and seven threaded holes which accommodate the screws 3.27, 3.36, 3.37 and 3.45. The linear bearings 3.9 slide along with the moving block 3.10 on the two supporting rods 3.8, in accordance with the motion induced by the leadscrew rod 3.11. The supporting rods 3.8 are fastened on both sides against the U shape support structure 3.42 and the leg rectangular pipe 3.2 by the screws 3.14. The L shape support structure 3.40 supports as well the rods 3.8, and the first is connected to the U shape support structure 3.42 through the screws 3.38. The leadscrew rod 3.11 passes unobstructed through the L shape support structure 3.40.
- The end of the oscillatory motion path is detected electronically by the means of two switches "single-pole, single-throw" (on or off) 3.18 which are mounted on the U shape support structure 3.42. On the lower side of the moving block 3.10 there are two perpendicular flat boards 3.19 arranged on opposite sides, that trigger the switches 3.18 when the moving block 3.10 reaches either end of the motion path. The switches 3.18 may be used only for the first round that the rocking apparatus imparts an oscillating motion. The subsequent oscillating motions don't need to use the switches 3.18 to detect the end of the movement path, as the control logic of the motion control unit 6 (
Fig. 1 ) stores in its memory the location of the switches 3.18. More information regarding the switches logic will be included further down in the motion control andcommunication unit 6 description. - The motor 3.6 electric cables and the switches 3.18 electric cables are protected by a housing 3.24 (
Fig. 21 ) which is mounted on the flat base 3.1. The housing 3.24 is secured against the flat base 3.1 using two screws 3.32, and shields the electric cables against being tangled by the decorative housing 3.20. - The frame supporting structure 3.39 is mounted on the moving block 3.10 using the screws 3.27, 3.36, 3.37 and 3.45. The flat sheet 3.16 is welded to the frame supporting structure 3.39 in order to increase the last mechanical resistance. The decorative housing 3.20 wraps and hides the frame supporting structure 3.39 and the internal leg mechanism. As shown in
Fig 25 , there is no physical contact between the decorative housing 3.20 and the leg lower side which includes the flat base 3.1, the electric cables housing 3.24, and the rectangular pipe 3.2. - The oscillatory motion is imparted in a horizontal plane to the moving block 3.10, to the connected supporting structure 3.39, to the decorative housing 3.20, to the linkage assembly 3.17 and to the bolt 3.21. The bolt 3.21 is rigidly mounted on the frame supporting structure 3.39 and passes through the decorative housing 3.20. The bolt 3.25 is mounted onto the U shape support structure 3.42 using the nut 3.26 and passes unobstructed through the frame supporting structure 3.39 and the decorative housing 3.20. There is no physical contact between the bolt 3.25 and the frame supporting structure 3.39, and neither the decorative housing 3.20.
- The bolt 3.21 is connected to the
leg 3 moving apparatus and the bolt 3.25 is connected to theleg 3 static structure. One of the legs connecting rods that comprise the rod segment 4 (seeFig. 1 ) may be screwed into the bolt 3.21 and tightened with the nut 4.1. The other connecting rod is screwed into the bolt 3.25. As mentioned above, the connection between themotion imparting leg 3 and thepassive leg 2 is done through connectingrod segments - The linkage assembly 3.17 (
Fig. 21 ) is tightened against the decorative housing 3.20 and the moving block 3.10 using the screws 3.36 and 3.37. The linkage assembly 3.17 comprise two parallel groove cuts which allow to adjust the linkage assembly 3.17 relative position against the decorative housing 3.20. By loosening the screws 3.36 and 3.37 the linkage assembly 3.17 may be moved inwards or outwards the leg's edge in order to match any bed frame width. - The
motion imparting leg 3 may replace themotion imparting leg 1 in any of the present invention embodiments. - Referring to the drawing in
Fig. 27 , it shows the electrical block schematic of the preferred embodiment of the modular rocking bed system. The last corresponds to the apparatus disclosed in theFigs. 1-3 and comprises twomotion imparting legs 1, twopassive legs 2, the motion control andcommunication unit 6, adata communication network 11,motion sensors brain activity sensor 15, a wrist temperature, heart rate andblood pressure sensor 12, and auser terminal 13. The electrical parts of themotion imparting leg 1 are the motor 1.1 and two switches 1.22. The electrical parts of thepassive leg 2 are the two switches 2.11. The motion control andcommunication unit 6 comprise two motor drivers 6.7, a network data communication module 6.2, a microcontroller 6.1, three potentiometers 6.3, 6.4, 6.5, and a switch 6.6. The motion control andcommunication unit 6 is connected to twomotion imparting legs 1, twopassive legs 2, twomotion sensors 7, and the weight sensor 2.40. The weight sensor 2.40 may be part of amotion imparting leg passive leg 2. In this schematic it is part of thepassive leg 2. - The electric motors 1.1 are controlled by the motor drivers 6.7, that are part of the motion control and
communication unit 6. The microcontroller 6.1 maintains the synchronization between the motors 1.1 through a motion control software. The last ensures that both motors 1.1 instantaneous speed and implicitly the relative distance between all the legs moving parts is maintained constant at any time. The oscillatory rocking motion is achieved by changing the motors 1.1 rotation sense at the end of the motion path. The last is bordered by the switches 1.22 and 2.11. The switches 1.22 detect the end of the motion paths for thelegs 1 and the switches 2.11 detect the end of the motion path for thelegs 2. The microcontroller 6.1 detects whether any of them is triggered on a given motion path, that imply the end of the motion path is reached. In that case the motors 1.1 are stopped and the last rotation is reversed. Subsequently the rocking apparatus starts to move in the opposite direction until the switches 1.22 and 2.11 are triggered again at the other end of the motion path. The switches may be used only for the first round that the rocking apparatus imparts an oscillating motion. The subsequent oscillating motions don't need to use the switches to detect the end of the oscillation path, as the control logic of themotion control unit 6 stores in its memory the switches location. - The motion control and
communication unit 6 provides the basic user controls for the rocking motion system. The controls comprise the potentiometer 6.3 that controls the rocking speed, the potentiometer 6.4 that controls the amount of time after which the rocking motion ceases following a state of no motion from the motion sensors, the potentiometer 6.5 that controls the total expected sleep duration after which the rocking motion is disabled, and a switch 6.6 which forces the rocking motion activation or deactivation. Further details related to the user controls usage are explained in relation toFig 29 . - The user controls 6.3, 6.4, 6.6 may be overridden by an application which runs on the terminal 13, along with other user customized controls. The application that runs on the terminal 13 may include a sleep tracking functionality, and a database that contains the history of the sleep and the motion related data over a period of time.
- The
motion sensors blood pressure sensor 12, and thebrain activity sensor 15 are used to track the user status, in relation to sleep and alertness. The weight sensor 2.40 uses a method which measures the differential of the total bed weight over time, and based on that detects whether the user lies or not on the bed. This information along with the user settings is used for starting and stopping the rocking motion in an automated way. The present invention doesn't limit the type of sensors which may be used for tracking the user status. Further details regarding the relation between the information provided by the motion, temperature, heart rate, blood pressure and weight sensors, and the induced rocking motion are explained in relation toFig. 29 . - Referring to the drawing in
Fig. 28 , it shows the electrical block schematic of the second embodiment of the modular rocking bed system. The last corresponds to the apparatus disclosed in theFig. 4 and comprise fourmotion imparting legs 1, the motion control andcommunication unit 6, adata communication network 11,motion sensors 7, a weight sensor 2.40, a passive infrared sensor (PIR) 16, a headbandbrain activity sensor 15, a wrist temperature, heart rate andblood pressure sensor 12, and auser terminal 13. The motion control andcommunication unit 6 comprise four motor drivers 6.7, one corresponding to each of the motion imparting leg motors 1.1. Similarly, to the functionality disclosed in relation toFig. 27 , the microcontroller 6.1 maintains the synchronization between the motors 1.1 through a motion control software. The last ensures that all the four motors 1.1 instantaneous speed and implicitly the relative distance between the legs moving parts is maintained constant at any time. The remaining blocks and system functionality inFig. 28 is identical to the one described in relation toFig. 27 . - Referring to the drawing in
Fig. 29 , it discloses a flowchart of the rocking bed motion state machine. Firstly, the method detects whether the bed total weight has increased or theuser 14 switches on manually the bed rocking movement using the switch 6.6 (100). The term "bed total weight" as used throughout the specification imply the sum of the bed and the user weights. The bed total weight is monitored by the weight sensor 2.40, and the assumption is that when theuser 14 lies on thebed 9, the last total weight increases. This triggers the notification that the user lies on the bed and afterward, the bed starts to move on a predefined direction, which imply that all the motion imparting legs will start to push the bed in the same direction (102). Afterward, the method detects whether the bed total weight has decreased, or the user switched off manually the bed rocking using the switch 6.6, or there is no user motion detected using themotion sensors possible legs - The method executes the
bed 9 rocking motion by looping back to state (102) until any of the conditions in state (104) are true. In that case the bed stops the movement (108) and gets back into the mode (100). The flowchart discloses a simplified rocking bed state machine that doesn't cover complex scenarios which imply and are not limited to user defined controls, motion or oscillation patterns which use the information provided bymotion sensors blood pressure sensors 12,brain activity sensors 15, or settings from an application running on acontrol terminal 13. - Another important method for controlling the
bed 9 rocking motion characteristics, consists in using the periodicity and level information of the wave signals that are captured by one or morebrain activity sensors 15, for setting and synchronizing thebed 9 oscillatory motion periodicity and speed.
Claims (15)
- A motion imparting leg (1, 3) which imparts an oscillating or reciprocating rocking motion, in a horizontal plane to a rocking bed (9), comprising an electric motor (1.1, 3.6), a moving block (1.8, 3.10), a support structure (1.12, 3.2), a flat base (1.21, 3.1) and a linkage assembly (1.20, 3.17), characterized in that it further comprises a worm gear reducer (1.2, 1.4), or a timing pulley gear reducer (3.7, 3.12, 3.13).
- A motion imparting leg (1, 3) according to claim 1, wherein it further comprises a leadscrew rod (1.5, 3.11) which is coupled to the worm gear toothed wheel (1.4) or to the timing pulley (3.12), two guiding rods (1.10, 3.8) on which the moving block (1.8, 3.10) slides mounted on linear bearings (1.9, 3.9), a U shape support structure (1.11, 3.42) on which two on/off switches (1.22, 3.18) are mounted on opposite sides, a frame supporting structure (1.18, 3.39) which is mounted on the moving block (1.8, 3.10), a decorative housing (1.24, 3.20) which covers the frame supporting structure (1.18, 3.39), and a linkage assembly (1.20, 3.17) which is mounted on top of the decorative housing (1.24, 3.20).
- A passive leg (2) for a rocking bed (9) comprising a moving block (2.6), a support structure (2.2), a flat base (2.1), and a linkage assembly (2.10), characterized in that it further comprises a motion blocking mechanism (2.19) that prevents the moving block (2.6) to move freely before the passive leg (2) installation.
- A passive leg (2) for a rocking bed (9) according to claim 3, wherein it further comprises two guiding rods (2.4) on which the moving block (2.6) slides mounted on linear bearings (2.5), a U shape support structure (2.22) on which two on/off switches (2.11) are mounted on opposite sides, a frame supporting structure (2.31) which is mounted on the moving block (2.6), a decorative housing (2.13) which covers the frame supporting structure (2.31), a linkage assembly (2.10) which is mounted on top of the decorative housing (2.13), and a sensor that detects the bed weight (2.40).
- An apparatus according to any of the preceding claims, wherein the motion imparting leg (1, 3) or the passive leg (2) comprises a leg holder supporting structure (1.35, 1.36), which replaces the legs supporting structure (1.18, 1.19; 2.31. 2.9; 3.16, 3.39). The apparatus further contains an adjustable U shaped holder 1.37 which slides in and out of the supporting structure (1.35), in order to fasten and immobilize an existing bed (9) leg against the supporting structure (1.36).
- An apparatus (10) for rocking an adult or baby bed (9), that comprises two motion imparting legs (1, 3) according to any one of the claims 1, 2, 5, two passive legs (2) according to any one of the claims 3, 4, 5, and further comprises two pairs of connecting rod segments (4, 5) which connect each motion imparting leg (1, 3) to a passive leg (2), a motion control and communication unit (6), one or more motion sensors (7, 16), one or more temperature, heart rate and blood pressure sensors (12), and one or more brain activity sensors (15).
- An apparatus (10) for rocking an adult or baby bed (9), that comprises four motion imparting legs (1, 3) according to any one of the claims 1, 2, 5, a motion control and communication unit (6), one or more motion sensors (7, 16), one or more temperature, heart rate and blood pressure sensors (12), and one or more brain activity sensors (15).
- A motion control and communication unit (6) for controlling a rocking bed (9), characterized in that it comprises a microcontroller (6.1), one or more motor drivers (6.7), a communication module (6.2), one or more user control potentiometers (6.3, 6.4, 6.5), and one or more user switches (6.6).
- A method for controlling a rocking bed (9), wherein the motion control and communication unit (6):• maintains the synchronization between the motors (1.1, 3.6),• monitors the end of oscillation path switches (1.22, 2.11, 3.18),• tracks the activity of the sensors (7, 12, 15, 16, 2.40),• reads the user control potentiometer (6.3, 6.4, 6.5) and switch (6.6) values,• sends and receives data towards a wired or wireless communication network (11), through a data communication module (6.2).
- The method of claim 9, which controls a rocking bed (9) oscillatory and reciprocating motion, by changing the motors (1.1, 3.6) rotation sense at the end of the motion path, that is triggered by the end of path switches (1.22, 2.11, 3.18).
- The method of claim 9 or 10 for activating, deactivating and adjusting a bed (9) rocking motion, wherein the motion control and communication unit (6) uses the information from one or more sensors (7, 12, 15, 16, 2.40).
- A method in accordance with claim 11, wherein the sensors (7, 12, 15, 16, 2.40) provide information about one or more of the following parameters: user motion, temperature, heart rate, blood pressure and brain activity, and this information is used for controlling the bed (9) rocking motion characteristics.
- A method in accordance with claim 12, wherein the bed (9) oscillatory motion periodicity and speed is derived from the periodicity and level of wave signals that are captured by one or more brain activity sensors (15).
- A method in accordance with claim 13, wherein the bed (9) rocking motion parameters: oscillation speed, oscillation pattern, and oscillation duration are set using the device motion control and communication unit (6), or by means of a remote terminal (13).
- A method in accordance with claim 14, wherein the period of rocking motion or inactivity is triggered at a programmable time interval.
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP16197183.3A EP3318162A1 (en) | 2016-11-03 | 2016-11-03 | Modular rocking bed with programmable control |
| US16/346,186 US20190290011A1 (en) | 2016-11-03 | 2017-11-02 | Modular rocking bed with programmable control |
| EP17801618.4A EP3534755A1 (en) | 2016-11-03 | 2017-11-02 | Modular rocking bed with programmable control |
| CN201780064665.0A CN110062591B (en) | 2016-11-03 | 2017-11-02 | Modular cradle with programmable controller |
| PCT/EP2017/078014 WO2018083153A1 (en) | 2016-11-03 | 2017-11-02 | Modular rocking bed with programmable control |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP16197183.3A EP3318162A1 (en) | 2016-11-03 | 2016-11-03 | Modular rocking bed with programmable control |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP3318162A1 true EP3318162A1 (en) | 2018-05-09 |
Family
ID=57240948
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP16197183.3A Withdrawn EP3318162A1 (en) | 2016-11-03 | 2016-11-03 | Modular rocking bed with programmable control |
| EP17801618.4A Pending EP3534755A1 (en) | 2016-11-03 | 2017-11-02 | Modular rocking bed with programmable control |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP17801618.4A Pending EP3534755A1 (en) | 2016-11-03 | 2017-11-02 | Modular rocking bed with programmable control |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20190290011A1 (en) |
| EP (2) | EP3318162A1 (en) |
| CN (1) | CN110062591B (en) |
| WO (1) | WO2018083153A1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102020100054A1 (en) * | 2020-01-03 | 2021-07-08 | Robert REIZ | Device for moving a cot |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102019131239A1 (en) * | 2019-11-19 | 2021-05-20 | Frank Krause | Method for moving a bed surface, a bed frame, a slatted frame, a mattress and a control panel |
| CN111053659B (en) * | 2020-01-16 | 2024-08-27 | 赵自健 | Health-care shaking table |
| RU2020110924A (en) * | 2020-03-16 | 2021-09-16 | Илья Ефимович Воронин | PUMPING MATTRESS |
| WO2021263199A2 (en) * | 2020-06-25 | 2021-12-30 | Brigham Young University | A device and method to induce vibrational waveforms that heterodyne in the body to improve sleep onset and sleep quality |
| US11812858B1 (en) | 2020-08-19 | 2023-11-14 | Clay Plemmons | Programmable rocking bed |
| CN112826676A (en) * | 2021-01-09 | 2021-05-25 | 刘小芳 | Paediatrics nursing intelligence shaking table |
| US11696651B2 (en) | 2021-06-10 | 2023-07-11 | Ryan Taylor Manwaring | Crib conversion devices for enabling bouncing motion |
| GB2610164A (en) | 2021-08-18 | 2023-03-01 | Adiva Wellness Srl | Improved rocking legs for a bed |
| WO2023195936A1 (en) * | 2022-04-07 | 2023-10-12 | Eli̇t Dayanikli Tüketi̇m Mallari Gida İnş. İç Ve Diş. Ti̇c.Ltd.Şti̇. | Motor system in vertical swing baby cradle |
Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3934283A (en) | 1974-06-17 | 1976-01-27 | Raffel Marvin J | Bed frame with readily connectable vibrator motors |
| US4793010A (en) | 1987-10-28 | 1988-12-27 | General Ideas & Products Ltd. | Baby rocker apparatus |
| FR2649872A1 (en) * | 1989-05-11 | 1991-01-25 | Canovas Gines | Device for rocking young children |
| EP0420065A2 (en) * | 1989-09-29 | 1991-04-03 | Infant Advantage, Inc. | Infant environmental transition system and method |
| DE29710002U1 (en) * | 1997-06-09 | 1997-09-04 | Olsen Joerg Dipl Betriebsw | stroller |
| US6068566A (en) * | 1997-12-31 | 2000-05-30 | Kim; Do Hyong | Device for driving a childcare apparatus for infants |
| WO2005084497A1 (en) | 2004-03-08 | 2005-09-15 | Mitchell Christopher Robert Mu | Rocking apparatus for an infant enclosure |
| US20070094792A1 (en) | 2005-10-31 | 2007-05-03 | Sims Dewey M Jr | Variable motion rocking bed |
| EP1900311A1 (en) | 2006-09-12 | 2008-03-19 | Makeridea S.r.l. | Apparatus for vibration of a cot, cradle, or the like |
| ES2383364A1 (en) * | 2010-10-27 | 2012-06-20 | Universidad De Valladolid | Automatic arming device (Machine-translation by Google Translate, not legally binding) |
| US8856982B1 (en) | 2010-07-13 | 2014-10-14 | Christopher George Kalivas | Motion bed |
| US20150250329A1 (en) * | 2014-03-04 | 2015-09-10 | LeRahn Murray | Bassinet apparatus |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR1103398A (en) * | 1954-07-02 | 1955-11-02 | Mechanism to communicate back and forth motion to cradles and similar cars | |
| US2888086A (en) * | 1957-09-06 | 1959-05-26 | Daniel C O'brien | Carriage oscillating device |
| CN2087461U (en) * | 1990-06-15 | 1991-10-30 | 秦皓 | Automatic rocking chassis for baby's bed and pram |
| DE19841592A1 (en) * | 1998-09-11 | 2000-03-23 | Knappe Dietmar | System providing automatic pushing to and fro of perambulator has connecting rod operated by crank and connected preferably to rear wheel axle of perambulator via claw |
| TW463751U (en) * | 2000-06-09 | 2001-11-11 | Chen Jeng Yi | The recycle system with electronic of baby car |
| CN2500180Y (en) * | 2001-09-14 | 2002-07-17 | 魏和斌 | Power operated rocking chair |
| TWM360624U (en) | 2009-03-03 | 2009-07-11 | Ying-Su Zhong | Electric rocking bed and chair structures |
| CN204378607U (en) * | 2015-01-30 | 2015-06-10 | 三峡大学 | Based on the electric baby bouncing cradle of smart mobile phone monitoring |
| US10258761B2 (en) * | 2015-04-16 | 2019-04-16 | Graco Children's Products Inc. | Children's product with synchronized sound and non-sound output |
-
2016
- 2016-11-03 EP EP16197183.3A patent/EP3318162A1/en not_active Withdrawn
-
2017
- 2017-11-02 WO PCT/EP2017/078014 patent/WO2018083153A1/en active Search and Examination
- 2017-11-02 CN CN201780064665.0A patent/CN110062591B/en active Active
- 2017-11-02 EP EP17801618.4A patent/EP3534755A1/en active Pending
- 2017-11-02 US US16/346,186 patent/US20190290011A1/en not_active Abandoned
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3934283A (en) | 1974-06-17 | 1976-01-27 | Raffel Marvin J | Bed frame with readily connectable vibrator motors |
| US4793010A (en) | 1987-10-28 | 1988-12-27 | General Ideas & Products Ltd. | Baby rocker apparatus |
| FR2649872A1 (en) * | 1989-05-11 | 1991-01-25 | Canovas Gines | Device for rocking young children |
| EP0420065A2 (en) * | 1989-09-29 | 1991-04-03 | Infant Advantage, Inc. | Infant environmental transition system and method |
| DE29710002U1 (en) * | 1997-06-09 | 1997-09-04 | Olsen Joerg Dipl Betriebsw | stroller |
| US6068566A (en) * | 1997-12-31 | 2000-05-30 | Kim; Do Hyong | Device for driving a childcare apparatus for infants |
| WO2005084497A1 (en) | 2004-03-08 | 2005-09-15 | Mitchell Christopher Robert Mu | Rocking apparatus for an infant enclosure |
| US20070094792A1 (en) | 2005-10-31 | 2007-05-03 | Sims Dewey M Jr | Variable motion rocking bed |
| EP1900311A1 (en) | 2006-09-12 | 2008-03-19 | Makeridea S.r.l. | Apparatus for vibration of a cot, cradle, or the like |
| US8856982B1 (en) | 2010-07-13 | 2014-10-14 | Christopher George Kalivas | Motion bed |
| ES2383364A1 (en) * | 2010-10-27 | 2012-06-20 | Universidad De Valladolid | Automatic arming device (Machine-translation by Google Translate, not legally binding) |
| US20150250329A1 (en) * | 2014-03-04 | 2015-09-10 | LeRahn Murray | Bassinet apparatus |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102020100054A1 (en) * | 2020-01-03 | 2021-07-08 | Robert REIZ | Device for moving a cot |
Also Published As
| Publication number | Publication date |
|---|---|
| CN110062591A (en) | 2019-07-26 |
| CN110062591B (en) | 2022-03-15 |
| WO2018083153A1 (en) | 2018-05-11 |
| EP3534755A1 (en) | 2019-09-11 |
| US20190290011A1 (en) | 2019-09-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20190290011A1 (en) | Modular rocking bed with programmable control | |
| US10864137B2 (en) | System and method of an adjustable bed with a vibration motor | |
| US9737155B2 (en) | System for tandem bed communication | |
| US5103511A (en) | Oscillatory bed | |
| CA2789496C (en) | Adjustable bed position control | |
| US8682457B2 (en) | Wireless control of an adjustable bed | |
| US20160120740A1 (en) | System and method of an adjustable bed with a vibration motor | |
| US20130191992A1 (en) | Adjustable bed frame with mattress bracket | |
| WO2013173640A1 (en) | System and method of a bed with a safety stop | |
| CN109109956B (en) | Baby carriage | |
| US20180220805A1 (en) | Vibration motor assembly for bed facility | |
| JP2001340198A (en) | Pillow automatically variable in height | |
| KR870000712B1 (en) | Cradle with an electromotor | |
| UA135986U (en) | BED-STROLLER WITH INTELLECTUAL MANAGEMENT SYSTEM |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION IS DEEMED TO BE WITHDRAWN |
|
| 18D | Application deemed to be withdrawn |
Effective date: 20181110 |