EP3231918A1 - Dehydrator - Google Patents
Dehydrator Download PDFInfo
- Publication number
- EP3231918A1 EP3231918A1 EP15867010.9A EP15867010A EP3231918A1 EP 3231918 A1 EP3231918 A1 EP 3231918A1 EP 15867010 A EP15867010 A EP 15867010A EP 3231918 A1 EP3231918 A1 EP 3231918A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- dewatering
- dewatering tank
- washings
- tank
- rotating speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images





















Classifications
-
- D—TEXTILES; PAPER
- D06—TREATMENT OF TEXTILES OR THE LIKE; LAUNDERING; FLEXIBLE MATERIALS NOT OTHERWISE PROVIDED FOR
- D06F—LAUNDERING, DRYING, IRONING, PRESSING OR FOLDING TEXTILE ARTICLES
- D06F33/00—Control of operations performed in washing machines or washer-dryers
- D06F33/30—Control of washing machines characterised by the purpose or target of the control
- D06F33/48—Preventing or reducing imbalance or noise
-
- D—TEXTILES; PAPER
- D06—TREATMENT OF TEXTILES OR THE LIKE; LAUNDERING; FLEXIBLE MATERIALS NOT OTHERWISE PROVIDED FOR
- D06F—LAUNDERING, DRYING, IRONING, PRESSING OR FOLDING TEXTILE ARTICLES
- D06F23/00—Washing machines with receptacles, e.g. perforated, having a rotary movement, e.g. oscillatory movement, the receptacle serving both for washing and for centrifugally separating water from the laundry
- D06F23/06—Washing machines with receptacles, e.g. perforated, having a rotary movement, e.g. oscillatory movement, the receptacle serving both for washing and for centrifugally separating water from the laundry and rotating or oscillating about an inclined axis
-
- D—TEXTILES; PAPER
- D06—TREATMENT OF TEXTILES OR THE LIKE; LAUNDERING; FLEXIBLE MATERIALS NOT OTHERWISE PROVIDED FOR
- D06F—LAUNDERING, DRYING, IRONING, PRESSING OR FOLDING TEXTILE ARTICLES
- D06F37/00—Details specific to washing machines covered by groups D06F21/00 - D06F25/00
- D06F37/02—Rotary receptacles, e.g. drums
- D06F37/04—Rotary receptacles, e.g. drums adapted for rotation or oscillation about a horizontal or inclined axis
-
- D—TEXTILES; PAPER
- D06—TREATMENT OF TEXTILES OR THE LIKE; LAUNDERING; FLEXIBLE MATERIALS NOT OTHERWISE PROVIDED FOR
- D06F—LAUNDERING, DRYING, IRONING, PRESSING OR FOLDING TEXTILE ARTICLES
- D06F37/00—Details specific to washing machines covered by groups D06F21/00 - D06F25/00
- D06F37/20—Mountings, e.g. resilient mountings, for the rotary receptacle, motor, tub or casing; Preventing or damping vibrations
-
- D—TEXTILES; PAPER
- D06—TREATMENT OF TEXTILES OR THE LIKE; LAUNDERING; FLEXIBLE MATERIALS NOT OTHERWISE PROVIDED FOR
- D06F—LAUNDERING, DRYING, IRONING, PRESSING OR FOLDING TEXTILE ARTICLES
- D06F37/00—Details specific to washing machines covered by groups D06F21/00 - D06F25/00
- D06F37/30—Driving arrangements
- D06F37/304—Arrangements or adaptations of electric motors
-
- D—TEXTILES; PAPER
- D06—TREATMENT OF TEXTILES OR THE LIKE; LAUNDERING; FLEXIBLE MATERIALS NOT OTHERWISE PROVIDED FOR
- D06F—LAUNDERING, DRYING, IRONING, PRESSING OR FOLDING TEXTILE ARTICLES
- D06F37/00—Details specific to washing machines covered by groups D06F21/00 - D06F25/00
- D06F37/30—Driving arrangements
- D06F37/36—Driving arrangements for rotating the receptacle at more than one speed
-
- D—TEXTILES; PAPER
- D06—TREATMENT OF TEXTILES OR THE LIKE; LAUNDERING; FLEXIBLE MATERIALS NOT OTHERWISE PROVIDED FOR
- D06F—LAUNDERING, DRYING, IRONING, PRESSING OR FOLDING TEXTILE ARTICLES
- D06F2103/00—Parameters monitored or detected for the control of domestic laundry washing machines, washer-dryers or laundry dryers
- D06F2103/02—Characteristics of laundry or load
-
- D—TEXTILES; PAPER
- D06—TREATMENT OF TEXTILES OR THE LIKE; LAUNDERING; FLEXIBLE MATERIALS NOT OTHERWISE PROVIDED FOR
- D06F—LAUNDERING, DRYING, IRONING, PRESSING OR FOLDING TEXTILE ARTICLES
- D06F2103/00—Parameters monitored or detected for the control of domestic laundry washing machines, washer-dryers or laundry dryers
- D06F2103/24—Spin speed; Drum movements
-
- D—TEXTILES; PAPER
- D06—TREATMENT OF TEXTILES OR THE LIKE; LAUNDERING; FLEXIBLE MATERIALS NOT OTHERWISE PROVIDED FOR
- D06F—LAUNDERING, DRYING, IRONING, PRESSING OR FOLDING TEXTILE ARTICLES
- D06F2105/00—Systems or parameters controlled or affected by the control systems of washing machines, washer-dryers or laundry dryers
Definitions
- the present disclosure relates to a dewatering machine.
- a washing machine with a dewatering function is disclosed in the following patent literature 1.
- a central axis of the washing tank is obliquely arranged relative to a plumb line. Therefore, an upper part of the washing tank is obliquely configured in a manner of protruding towards a front side of the washing machine.
- Patent literature 1 Japanese Patent Application Laid-open No. 2000-312795
- the present disclosure is made on the basis of the background and aims to provide a washing machine capable of inhibiting eccentric rotation of a biased dewatering tank early.
- the present disclosure provides a dewatering machine, including: a dewatering tank, formed in a cylindrical shape with a central axis extending in a direction inclined relative to an up-down direction, the dewatering tank is configured to contain washings, and rotate around the central axis so as to dewater the washings; a balancing ring, formed in a hollow annular shape, the balancing ring is coaxially arranged in the dewatering tank, and liquid for achieving rotational balance of the dewatering tank is contained in the balancing ring and flows freely; and a dewatering preparation unit, configured to cause the dewatering tank, in a dewatering preparation stage for the washings, to rotate at a rotating speed lower than a lowest rotating speed at which the dewatering tank resonates, so as to detect a biased position of the washings in the dewatering tank; and cause the dewatering tank to stop rotating immediately before the washings biased in the dewatering tank are positioned, relative to the central axis, at an opposite side of the
- a dewatering machine including: a dewatering tank, formed in a cylindrical shape with a central axis extending in a direction inclined relative to an up-down direction, the dewatering tank is configured to contain washings, and rotate around the central axis so as to dewater the washings; an electric motor, configured to cause the dewatering tank to rotate; an information value acquisition unit, configured to, when the electric motor is in an acceleration state of accelerating to a target rotating speed used for formally dewatering the washings, sequentially acquire an information value that should be decreased as a rotating speed of the electric motor increases; a counting unit, configured to add a count value with an initial value of zero by 1 once the information value acquisition unit acquires the information value; a calculation unit, configured to calculate an accumulated value of a difference between the information value and a previous information value under a condition that the information value is larger than the previous information value; a determination unit, configured to determine that the washings are biased in the dewatering tank when the accumulated value with the
- the dewatering machine further includes an information correction unit, configured to correct the information value through moving average before the accumulated value is calculated by the calculation unit.
- the dewatering machine further includes an execution unit, the execution unit is configured to alternatively execute any of a restarting process and a correction process under a condition that the dewatering tank is stopped rotating through the stopping unit, the restarting process is a process for restarting to dewater the washings by causing the dewatering tank to rotate again, and the correction process is a process for correcting the biasing of the washings in the dewatering tank; and the execution unit is configured to select to execute the correction process rather than selecting to execute the restarting process in the following situation: the restarting process has been executed for a specified number, and the dewatering tank is caused to stop rotating by the stopping unit
- the dewatering machine further includes an acceleration unit, and the acceleration unit causes the electric motor to accelerate in three stages including a first acceleration stage, a second acceleration stage and a third acceleration stage.
- the first acceleration stage refers to an acceleration stage, in which the motor accelerates toward the target rotating speed from starting rotating until the rotating speed of the motor reaches a first rotating speed, the first rotating speed is higher than a rotating speed at which the dewatering tank resonates transversely and lower than a rotating speed at which the dewatering tank resonates longitudinally.
- the second acceleration stage is an acceleration stage, in which the rotating speed of the motor increases from the first rotating speed to a second rotating speed higher than the first rotating speed.
- the third acceleration stage is an acceleration stage, in which the rotating speed of the motor increases from the second rotating speed to the target rotating speed.
- the first threshold is independently set in the first acceleration stage, the second acceleration stage and the third acceleration stage respectively, and the information value acquisition unit is configured to acquire the information value in the first acceleration stage, the second acceleration stage and the third acceleration stage respectively, the counting unit causes the count value to be added by 1 and calculates the accumulated value, and the determination unit determines that the washings are biased in the dewatering tank when the accumulated value reaches the first threshold.
- the dewatering machine further includes a duty ratio acquisition unit, configured to acquire a duty ratio of voltage applied to the motor at each specified time in the third acceleration stage; and a transformation unit, configured to transform the duty ratio acquired by the duty ratio acquisition unit into a specified index value.
- the determination unit determines that the washings are biased in the dewatering tank.
- the dewatering machine further includes a threshold modification unit, configured to modify the second threshold according to the accumulated value in at least one acceleration stage of the first acceleration stage, the second acceleration stage and the third acceleration stage.
- the determination unit determines that the washings are biased in the dewatering tank.
- a dewatering machine including: a dewatering tank, formed in a cylindrical shape with a central axis extending in a direction inclined relative to an up-down direction, the dewatering tank is configured to contain washings, and rotate around the central axis so as to dewater the washings; an outer tank, configured to contain the dewatering tank; an electric motor, configured to cause the dewatering tank to rotate; a determination unit, configured to determine that the washings are biased in the dewatering tank when an information value, relevant to a rotation state of the electric motor before a rotating speed of the electric motor reaches a target rotating speed used for formally dewatering the washings, reaches a threshold; a detection unit, configured to mechanically detect eccentric rotation of the dewatering tank by contacting the outer tank when the dewatering tank eccentrically rotates along with biasing of the washings in the dewatering tank and the outer tank is caused to vibrate; a stopping unit, configured to cause the dewatering tank to stop rotating in one of the following
- a dewatering machine including: a dewatering tank, formed in a cylindrical shape with a central axis extending in a direction inclined relative to an up-down direction, the dewatering tank is configured to contain washings, and rotate around the central axis so as to dewater the washings; an outer tank, configured to contain the dewatering tank; an electric motor, configured to cause the dewatering tank to rotate; a determination unit, configured to determine that the washings are biased in the dewatering tank when an information value, relevant to a rotation state of the electric motor before a rotating speed of the electric motor reaches a target rotating speed used for formally dewatering the washings, reaches a threshold; a detection unit, configured to mechanically detect eccentric rotation of the dewatering tank by contacting the outer tank when the dewatering tank eccentrically rotates along with biasing of the washings in the dewatering tank and the outer tank is caused to vibrate; a stopping unit, configured to cause the dewatering tank to stop rotating in one of the following
- the dewatering tank of the dewatering machine since the dewatering tank of the dewatering machine has a cylindrical shape with a central axis extending along a direction inclined relative to an up-down direction, the dewatering tank is arranged obliquely.
- a hollow annular balancing ring is coaxially arranged on the dewatering tank.
- washings are assumed to be biased in a rotating direction of the dewatering tank in a same position as the liquid biased downwards in the balancing ring.
- the dewatering tank eccentrically rotates from the beginning of the rotation.
- a dewatering preparation unit causes the dewatering tank to rotate at a very low speed lower than a maximum rotating speed at which the dewatering tank resonates, so as to detect a biased position of the washings in the dewatering tank in a rotating direction.
- the dewatering preparation unit causes the dewatering tank to stop rotating according to the detected biased position immediately before the washings biased in the dewatering tank will be positioned at an opposite side of the liquid biased downwards in the balancing ring, relative to the central axis.
- the dewatering tank stops rotating when the washings biased in the dewatering tank are positioned at the opposite side of the liquid in the balancing ring relative to the central axis, the washings finally may come to a same side of the liquid in the balancing ring due to no time to stop and inertial rotation of the dewatering tank after stopping.
- the dewatering tank of the dewatering machine has a cylindrical shape having the central axis which extends along the direction inclined relative to the up-down direction, and is arranged obliquely.
- the dewatering machine which uses a motor to rotate the dewatering tank, in a state that the motor is accelerated to a target rotating speed for formally dewatering the washings, information values which are decreased with the increase of the rotating speed of the motor are acquired successively. When the information values are obtained each time, a count value with an initial value of zero is added by 1.
- the information value is a high accuracy value of eliminating an error.
- the accumulated value with high accuracy is calculated according to the corrected information value, and whether the washings are biased is detected through the accumulated value with high accuracy, so that eccentric rotation of the dewatering tank may be inhibited early.
- the restarting process is a process for restarting to dewater the washing by enabling the dewatering tank to rotate again
- the correction process is a process for correcting washing biasing in the dewatering tank.
- Dewatering is started again through the restarting process under a condition that washing biasing is small to an extent without generating eccentric rotation of the dewatering tank, so that time used by the whole dewatering process may be shortened as much as possible. Under a condition that washing biasing is large to an extent that eccentric rotation of the dewatering tank is still generated, washing biasing may be reliably corrected through the correction process.
- the accumulated values are respectively calculated, and when the accumulated values reach the corresponding first thresholds in the first acceleration stage, the second acceleration stage and the third acceleration stage respectively, washing biasing in the dewatering tank may be determined, so that the dewatering tank stops rotating. Namely, since the biasing of the washings is detected in the first acceleration stage after the motor starts to rotate, eccentric rotation of the dewatering tank may be inhibited early.
- the biasing of the washings is detected in three stages according to a sequence of the first acceleration stage, the second acceleration stage and the third acceleration stage, the condition of washing biasing may be reliably detected, and eccentric rotation of the dewatering tank is inhibited as early as possible.
- the third acceleration stage when the duty ratio acquired at each specified moment is transformed into a specified index value, and the index value reaches a second threshold at a corresponding moment, it is determined that the washings are biased in the dewatering tank. That is, in the third acceleration stage, since the condition whether the washing is biased in the dewatering tank is double detected by adopting a mode of the information values and the first thresholds and adopting a mode of the duty ratio and the second thresholds, eccentric rotation of the dewatering tank may be reliably inhibited early.
- the second threshold is properly changed according to the accumulated value in at least one acceleration stage of the first acceleration stage, the second acceleration stage and the third acceleration stage, whether the washings are biased may be detected with high accuracy through the second threshold changed with combination of a situation of the dewatering tank, and eccentric rotation of the dewatering tank is inhibited early.
- whether the washings are biased may be double detected through a mode whether the accumulated value reaches the first threshold and whether a variation of the accumulated value reaches the third threshold.
- eccentric rotation of the dewatering tank may be reliably inhibited early according to the variation of the accumulated value though the accumulated value may be small without reaching the first threshold.
- the dewatering tank of the dewatering machine is in a cylindrical shape with a central axis extending in the direction inclined relative to the up-down direction and is obliquely arranged. Whether the washings are biased in the dewatering tank is double detected through an electric mode based on a relationship between the information value relative to the rotation state of the motor and the threshold and a mechanical mode based on contact between the detection unit and the outer tank.
- the threshold is corrected under the following situation: a difference between the information value when the detection unit detects eccentric rotation of the dewatering tank and a threshold is above the specified value, or the determination unit determines that the washings are biased before eccentric rotation is detected by the detection unit.
- the dewatering tank of the dewatering machine is in the cylindrical shape with the central axis extending in the direction inclined relative to up-down direction and is obliquely arranged. Whether the washings are biased in the dewatering tank is double detected through the electric mode based on a relationship between the information value relative to the rotation state of the motor and the threshold and a mechanical mode based on contact between the detection unit and the outer tank.
- FIG. 1 is a schematic longitudinal sectional right side view illustrating a dewatering machine 1 according to an embodiment of the present disclosure.
- An up-down direction in FIG. 1 is referred to as an up-down direction Z of the dewatering machine 1
- a left-right direction in FIG. 1 is referred to as a front-rear direction Y of the dewatering machine 1.
- description is made to summary of the dewatering machine 1.
- an upper side is referred to as an upper side Z1
- a lower side is referred to as a lower side Z2.
- a left side in FIG. 1 is referred to as a front side Y1
- a right side in FIG. 1 is referred to as a rear side Y2.
- the dewatering machine 1 includes all apparatuses capable of carrying out a dewatering operation of washings Q. That is, the dewatering machine 1 not only includes an apparatus with a dewatering function, but also includes a washing machine with a dewatering function and a washing and drying machine. Description is made in regard to the dewatering machine 1 by taking the washing machine as an example below.
- the dewatering machine 1 includes: a housing 2, an outer tank 3, a dewatering tank 4, a rotary wing 5, an electric motor 6, and a transmission mechanism 7.
- the housing 2 is made of, such as, metal, and formed in a box shape.
- An upper surface 2A of the housing 2 is formed to be inclined relative to a horizontal direction (HD) in a manner of extending to the upper side Z1 toward the rear side Y2.
- An opening 8 to enable the inside and outside of the housing 2 to be communicated is formed in the upper surface 2A.
- a door 9 for opening and closing the opening 8 is arranged on the upper surface 2A.
- An operation part 10 consisting of a LCD operation panel and the like is arranged in an area closer the front side Y1 than the opening 8 on the upper surface 2A.
- a user could select a dewatering condition freely, or make indications, such as an indication of starting to run, an indication of stopping running, to the dewatering machine 1, by operating the operation part 10.
- the outer tank 3 is made of, such as, resin, and formed in a cylindrical shape having a bottom.
- the outer tank 3 has: a circumferential wall 3A, which is roughly cylindrical and configured along an inclined direction K inclined toward the front side Y1 relative to the up-down direction Z; a bottom wall 3B, configured to block a hollow part of the circumferential wall 3A from the lower side Z2; and an annular wall 3C, which is annular and protrudes towards a circle center side of the circumferential wall 3A while covering an edge at a side of the upper side Z1 of the circumferential wall 3A.
- the inclined direction K presents inclination not only relative to the up-down direction Z, but also relative to the horizontal direction (HD).
- An entrance 11 communicated with the hollow part of the circumferential wall 3A from the upper side Z1 is formed inside the annular wall 3C.
- the entrance 11 is opposite to the opening 8 of the housing 2 from the lower side Z2, and the entrance 11 and the opening 8 are in a communicated state.
- a door 12 for opening and closing the entrance 11 is arranged on the annual wall 3C.
- the bottom wall 3B is formed in a circulate plate shape which is orthogonal to the inclined direction K and obliquely extends relative to the horizontal direction (HD).
- a through hole 3D penetrating through the bottom wall 3B is formed in a circle center of the bottom wall 3B.
- Water can be stored in the outer tank 3.
- a water feeding pipeline 13 connected with a faucet of tap water is connected with the outer tank 3 from the upper side Z1, so that the tap water is fed to the outer tank 3 through the water feeding pipeline 13.
- a feeding valve 14 which can be opened and closed to start or stop water feeding is arranged in a midway of the water feeding pipeline 13.
- a drainage pipeline 15 is connected with the outer tank 3 from the lower side Z2, and the water in the outer tank 3 is discharged outside the machine from the drainage pipeline 15.
- a drainage valve 16 which can be opened and closed to start or stop drainage is arranged in a midway of the drainage pipeline 15.
- the dewatering tank 4 is made of, such as, metal, and has a central axis 17 extending along the inclined direction K.
- the dewatering tank 4 is formed in a cylindrical shape having a bottom smaller than that of the outer tank 3, and can accommodate the washings Q internally.
- the dewatering tank 4 has a roughly cylindrical circumferential wall 4A arranged along the inclined direction K and a bottom wall 4B for blocking a hollow part of the circumferential wall 4A from the lower side Z2.
- An internal circumferential surface of the circumferential wall 4A is an internal circumferential surface of the dewatering tank 4.
- An upper end of the internal circumferential surface of the circumferential wall 4A is an entrance 18 for enabling the hollow part of the circumferential wall 4A to expose to the upper side Z1.
- the entrance 18 is opposite to the entrance 11 of the outer tank 3 from the lower side Z2, and the entrance 18 and the entrance 11 are in a communicated state.
- the entrances 11 and 18 are opened and closed through the door 12 together.
- a user of the dewatering machine 1 takes the washings Q in and out of the dewatering tank 4 through the opened opening 8 and the entrances 11 and 18.
- the dewatering tank 4 is coaxially accommodated in the outer tank 3, and is obliquely arranged relative to the up-down direction Z and the horizontal direction HD.
- the dewatering tank 4 accommodated in the outer tank 3 can rotate around the central axis 17.
- a plurality of through holes which are not shown are formed in the circumferential wall 4A and the bottom wall 4B of the dewatering tank 4, and the water in the outer tank 3 can flow between the outer tank 3 and the dewatering tank 4 through the through holes. Therefore, a water level in the outer tank 3 is consistent with a water level in the dewatering tank 4.
- a balancing ring 19 formed in a hollow annular shape is coaxially arranged at the upper end of the circumferential wall 4A, and is used for reducing vibration of the dewatering tank 4 when the dewatering tank 4 rotates so as to obtain rotational balance of the dewatering tank 4.
- Liquids for obtaining the rotational balance of the dewatering tank 4, such as saline water, are accommodated in an annular cavity 19A in the balancing ring 19 in a free flow manner.
- the bottom wall 4B of the dewatering tank 4 is formed in a circulate plate shape extending with the bottom wall 3B of the outer tank 3 in parallel roughly across the gap in the upper side Z1, and a through hole 4C penetrating through the bottom wall 4B is formed at a circle center of the bottom wall 4B consistent with the central axis 17.
- a tubular supporting shaft 20 surrounding the through hole 4C and protruding to the lower side Z2 along the central axis 17 is arranged on the bottom wall 4B.
- the supporting shaft 20 is inserted into the through hole 3D on the bottom wall 3B of the outer tank 3, and a lower end of the supporting shaft 20 is located in the lower side Z2 of the bottom wall 3B.
- the rotary wing 5 i.e. so-called impeller, is formed in a discoid shape by taking the central axis 17 as a circle center, and is concentrically arranged with the dewatering tank 4 along the bottom wall 4B in the dewatering tank 4.
- a plurality of blades 5A radially configured are arranged on an upper surface of the rotary ring 5 facing the entrance 18 of the dewatering tank 4 from the lower side Z2.
- a rotating shaft 21 extending toward the lower side Z2 from a circle center of the rotary wing 5 along the central axis 17 is arranged on the rotary wing 5.
- the rotating shaft 21 is inserted into a hollow part of the supporting shaft 20, and a lower end of the rotating shaft 21 is located in the lower side Z2 of the bottom wall 3B of the outer tank 3.
- the motor 6 is realized through a variable frequency motor.
- the motor 6 is arranged in the lower side Z2 of the outer tank 3 in the housing 2, and is provided with an output shaft 22 rotating by centering the central axis 17.
- the transmission mechanism 7 is located between the lower ends of both the supporting shaft 20 and the rotating shaft 21, and an upper end of the output shaft 22.
- the transmission mechanism 7 selectively transmits a driving force outputted by the motor 6 from the output shaft 22 to one or both of the supporting shaft 20 and the rotating shaft 21.
- a widely known transmission mechanism can be taken as the transmission mechanism 7.
- the dewatering tank 4 and the rotary wing 5 rotates around the central axis 17 when the driving force from the motor 6 is transmitted to the supporting shaft 20 and the rotating shaft 21.
- the washings Q in the dewatering tank 4 are stirred through the rotating dewatering tank 4 and the blades 5A of the rotary wing 5 during a washing operation and a rinsing operation.
- a centrifugal force acts on the washings Q in the dewatering tank 4 through high-speed integrated rotation of the dewatering tank 4 and the rotary wing 5 during a dewatering operation after the rinsing operation.
- the washings Q are dewatered.
- a rotation direction of the dewatering tank 4 and the rotary wing 5 is consistent with a circumferential direction X of the dewatering tank 4.
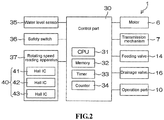
- FIG. 2 is a block diagram illustrating an electric structure of the dewatering machine 1.
- the dewatering machine 1 includes: a control part 30 served as a dewatering preparation unit, an information value acquisition unit, a counting unit, a calculation unit, a determination unit, a stopping unit, an information correction unit, an execution unit, an acceleration unit, a duty ratio acquisition unit, a conversion unit, a threshold changing unit, a threshold correction unit and a suspending unit.
- the control part 30 is configured as a microcomputer including: for example, CPU 31; memory 32 such as a ROM, a RAM; a timer 33; and as a counter 34 served as the counting unit, and the control part 30 is internally placed in the housing 2 (referring to FIG. 1 ).
- the dewatering machine 1 further includes: a water level sensor 35, a safety switch 36 as a detection unit, and a rotating speed reading apparatus 37.
- the water level sensor 35, the safety switch 36, the rotating speed reading apparatus 37, the motor 6, the transmission mechanism 7, the feeding valve 14, the drainage valve 16 and the operation part 10 are electrically connected with the control part 30 respectively.
- the control part 30 switches a transmission target of the driving force of the motor 6 to one or both of the supporting shaft 20 and the rotating shaft 21 by controlling the transmission mechanism 7.
- the control part 30 controls opening and closing of the feeding valve 14 and the drainage valve 16. As mentioned above, when the user selects the dewatering condition and the like of the washings Q by operating the operating part 10, the control part 30 receives the selection.
- the water level sensor 35 is a sensor for detecting the water level of the outer tank 3 and the dewatering tank 4, and a detection result of the water level sensor 35 is inputted into the control part 30 in real time.
- the safety switch 36 is a switch for detecting a vibration of the outer tank caused by an eccentric rotation of the dewatering tank 4 along with bias of the washings Q in the dewatering tank 4, and is arranged at a position away from the outer tank 3 by a specified interval along the horizontal direction HD in the housing 2 (referring to FIG. 1 ).
- the outer tank 3 is caused to vibrate along the horizontal direction HD substantially due to the eccentric rotation of the dewatering tank 4 along with the bias of the washings Q in the dewatering tank 4, the outer tank 3 comes into contact with the safety switch 36 in forward and transverse directions.
- the safety switch 36 is changed into "on”, so as to detect the vibration of the outer tank 3 mechanically, namely, the eccentric rotation of the dewatering tank 4.
- the detection result of the safety switch 36 is inputted into the control part 30 in real time.
- the rotating speed reading apparatus 37 is an apparatus for reading a rotating speed of the motor 6, and more specifically, is an apparatus for reading a rotating speed of the output shaft 22 of the motor 6, and consists of for example a plurality of Hall IC40.
- the rotating speed read by the rotating speed reading apparatus 37 is inputted into the control part 30 in real time.
- the control part 30 controls a duty ratio of a voltage applied to the motor 6 according to the inputted rotating speed, so that the motor 6 rotates with a desired rotating speed.
- the control part 30 applies a brake to the rotation of the motor 6 to stop the rotation of the dewatering tank 4 based on a fact that the eccentric rotation of the dewatering tank 4 is detected by the safety switch 36.
- the braker herein can cause a control part 30 to control the duty ratio to stop the rotation of the motor 6 urgently, and also can cause the control part 30 to start a brake device by additionally arranging the brake device (not shown), thereby stopping the rotation of the motor 6 urgently.
- the number of Hall IC40 is 3 in the present embodiment.
- the Hall IC40 are divided into a first Hall IC41, a second Hall IC42 and a third Hall IC43.
- the motor 6 has a rotor (not shown) integrally rotating with the output shaft 22, and magnets in a N-pole and magnets in a S-pole are arranged alternately in rows in a rotation direction of the rotor on an external circumferential surface of the rotor. If a group consisting of adjacent magnets in the N-pole and magnets in the S-pole are called as a "NS group", a plurality of NS groups are arranged along the rotation direction side by side on the external circumferential surface of the rotor.
- the first Hall IC41, the second Hall IC42, and the third Hall IC43 are arranged along the rotation direction of the rotor at regular intervals side by side according to such sequence.
- each NS group passes through each Hall IC40 along the rotation direction in sequence.
- each Hall IC40 transmits a pulse P.
- the rotating speed reading apparatus 37 reads the rotating speed of the motor 6 through a size of an interval of the adjacent pulses P.
- FIG. 3 is a sequence diagram illustrating a state of an output signal of the Hall IC40 forming the rotating speed reading apparatus 37.
- a horizontal axis indicates an elapsed time
- a vertical axis indicates an "on" and "off' state of the output signal of each Hall IC.
- FIG. 3 there exists a deviation between times that the first Hall IC41, the second Hall IC42 and the third Hall IC43 produce the pulse P. Therefore, when a certain NS group passes through each Hall IC40 in sequence, the first Hall IC41, the second Hall IC42 and the third Hall IC43 produce the pulses P respectively according to such sequence.
- the three Hall IC40 when there are three Hall IC40 like in the present embodiment, for example, in a period R of the first Hall IC41 from the time at which the pulse P1 disappears to a time at which the next pulse P2 is produced and then disappears, the three Hall IC40 produce six interruptions W in total. With respect to the entire three Hall IC 40, it is desired that an interval I from some interruption W to the next interruption W is always the same in a steady rotation state of the motor 6.
- the interval I may also be disordered even if the motor 6 rotates steadily, due to an installation error of the NS group of the motor 6 and an installation error of each Hall IC40. It shall be noted that, generally, the interval I is slowly decreased when the motor 6 is in an acceleration state.
- the interval I can be a value which is the same as a time unit (such as second), and can also be a summing value of counts in each interval I when the counter 34 (referring to FIG. 2 ) counts once according to a fixed period.
- FIG. 4 is a sequence diagram illustrating a state of a rotating speed of the motor 6 in the dewatering operation process.
- a horizontal axis indicates the elapsed time
- a vertical axis indicates a rotating speed of the motor 6 (unit: rpm).
- the rotating speed of the dewatering tank 4 is the same as that of the motor 6 during the dewatering operation.
- a preparation stage i.e., a dewatering preparation interval, of the washings Q is provided.
- the control part 30 adjusts a position relationship between the washings Q in the dewatering tank 4 and liquid in the balancing ring 19.
- the control part 30 starts the rotation of the motor 6, so as to dewater the washings Q.
- the control part 30 causes the motor 6 to rotate steadily at 120rpm after the rotating speed of the motor 6 being increased from 0rpm to 120rpm, i.e. a first rotating speed.
- the first rotating speed is greater than a rotating speed (such as 50rpm ⁇ 60rpm) at which a transverse resonance occurred on the dewatering tank 4, and is smaller than a rotating speed (such as 200rpm ⁇ 220rpm) at which a longitudinal resonance occurred on the dewatering tank 4.
- the control part 30 causes the motor 6 to rotate steadily at 240rpm after the rotating speed of the motor 6 being increased from 120rpm to 240rpm, i.e. a second rotating speed.
- the second rotating speed is slightly greater than the rotating speed at which the longitudinal resonance is occurred.
- the control part 30 causes the motor 6 to rotate steadily at 800rpm after the rotating speed of the motor 6 being increased from 240rpm to 800rpm, i.e. a target rotating speed.
- the washings Q in the dewatering tank 4 are formally dewatered through the steady rotation of the motor 6 at 800rpm.
- the control part 30 causes the motor 6 to accelerate through three stages i.e., a first acceleration stage of enabling the motor 6 to rotate to 120rpm from the beginning, a second acceleration stage of rotating from 120rpm to 240rpm, and a third acceleration stage of rotating from 240rpm to 800rpm, so as to reach a target 800rpm.
- a first acceleration stage of enabling the motor 6 to rotate to 120rpm from the beginning a second acceleration stage of rotating from 120rpm to 240rpm
- a third acceleration stage of rotating from 240rpm to 800rpm so as to reach a target 800rpm.
- the motor 6 is accelerated to 800rpm from 0rpm uninterruptedly, a drainage state of the drainage pipeline 15 may be deteriorated since a lot of water leaks from the washings Q, or the drainage pipeline 15 is jammed with foam.
- the motor 6 is accelerated stepwise so that a lot of water will not leak from the washings Q at one time. Therefore, such bad condition can be prevented.
- the washings Q in the dewatering tank 4 are in a bias configuration state of being distributed on the circumferential direction X (referring to FIG. 1 ) of the dewatering tank 4 unevenly, the washings Q are biased in the dewatering tank 4. If the dewatering operation is carried out in such state, the dewatering tank 4 may be substantially shaken due to the eccentric rotation thereof, thereby applying great vibration to the dewatering machine 1, producing noise.
- the control part 30 detects whether the washings Q in the dewatering tank 4 are biased during the dewatering operation, and stops the motor 6 when detecting that the washings Q are biased.
- the control part 30 performs four electric detections, i.e. detection 1, detection 2, detection 3 and detection 4, in such detection mode.
- detection 1, detection 2, detection 3 and detection 4 the mechanical detection of the safety switch 36 (referring to FIG. 1 ) is performed in the whole period of the dewatering operation.
- the term “detection” below refers to an action of inspecting
- the term “check” refers to an action of finding some result during the detection.
- Detection 1 is performed at the first acceleration stage.
- Detection 2 is performed at the second acceleration stage.
- Detection 3 and detection 4 are performed at the third acceleration stage. Specifically, detection 1 to detection 3 are performed in the whole period of the corresponding acceleration stages in the first acceleration stage to the third acceleration stage, and relative to this, detection 4 is performed in a midway of the third acceleration stage.
- the motor 6 is accelerated in three stages in the dewatering machine 1, thereby monitoring a rotation state of the dewatering tank 4 through detections 1-4 while avoiding performing the dewatering slowly at the rotating speeds at which the transverse resonance and the longitudinal resonance occurred, namely, 120rpm and 240rpm. Description is made to the dewatering preparation stage and detections 1-4 in sequence below.
- FIG. 5 is a schematic diagram illustrating an interior of the dewatering tank 4.
- FIG. 5 shows an interior of the dewatering tank 4 viewed along a direction of the central axis 17 of the dewatering tank 4.
- a front position biasing toward the front side Y1 and a deep position biasing toward the rear side Y2 are presented in the dewatering tank 4. Since the central axis 17 is arranged obliquely towards the front side Y1 relative to the up-down direction Z, the front position is located at a position closer to the lower side Z1 than the deep position (referring to FIG. 1 ).
- the liquid accommodated in the balancing ring 19 is free of the effect of the centrifugal force generated by the rotation of the dewatering tank 4 in a state that the dewatering tank 4 is static and that the dewatering tank 4 rotates at a very low speed, the liquid accommodated in the balancing ring 19 is provided at the front position in the balancing ring 19 due to a self-weight and biased towards the lower side Z2.
- the washings Q are placed in the dewatering tank 4 in a manner of being biased along the circumferential direction X, when the dewatering tank 4 starts to rotate, relative to the central axis 17, the washings Q are preferably located at the deep position at a side opposite to the liquid biased to the front position in the lower side Z2 in the balancing ring 19. If the washings Q are in such state, the eccentric rotation of the dewatering tank 4 can be inhibited from the beginning of the rotation since the dewatering tank 4 starts to rotate in a state that the washings Q and the liquid in the balancing ring 19 are roughly balanced.
- the washings Q are biased in the circumferential direction X of the dewatering tank 4 at a position same as the position where the liquid in the balancing ring 19 is biased towards the lower side Z2.
- the dewatering tank 4 carries out the eccentric rotation when starting to rotate.
- FIG. 6 is a sequence diagram illustrating a state of the rotating speed of the motor 6 at the preparation stage of dewatering operation.
- a horizontal axis indicates the elapsed time
- a vertical axis indicates the rotating speed of the motor 6 (unit: rpm).
- the dewatering tank 4 rotates steadily at a very low speed at the preparation stage. It shall be noted that, the rotating speed of the motor 6 at this time is lower than a minimum rotating speed when a resonance occurred on the dewatering tank 4.
- the minimum rotating speed is different due to different sizes of the dewatering tank 4, and is a rotating speed when the transverse resonance occurred on the dewatering tank 4 in the present embodiment, namely, 50rpm-60rpm described above.
- the rotating speed of the motor 6 at the preparation stage is 10rpm-30rpm, preferably 20rpm.
- the rotating speed of the motor 6 is changed like that shown in FIG. 6 . Specifically, the washings Q are moved toward the upper side Z1 when going to the deep position from the front position, which causes a burden to the motor 6. Therefore, the rotating speed of the motor 6 is reduced. On the contrary, the rotating speed of the motor 6 is increased due to the reduction of the previous burden when the washings Q are moved to the front position from the deep position.
- the washings Q are located at the front position when the rotating speed of the motor 6 is maximum, and the washings Q are located at the deep position when the rotating speed of the motor 6 is minimum. In this way, since the dewatering tank 4 rotates at very low speed, a biased position of the washings Q in the dewatering tank 4 in the circumferential direction X can be detected according to the rotating speed of the motor 6.
- FIG. 7 is a flow chart illustrating a control action at the preparation stage of dewatering operation.
- the control part 30 causes the motor 6 to start to rotate at very low speed at the dewatering preparation stage, so that the dewatering tank 4 rotates at very low speed (step S1). It shall be noted that, prior to the dewatering operation, if the water in the outer tank 3 and the dewatering tank 4 is discharged after the washings Q are rinsed, the motor 6 starts to rotate at the very speed in step S1 according to a current station that the discharging is finished.
- the control part 30 detects the biased position of the washings Q in the dewatering tank 4 in real time according to an output result from the rotating speed reading apparatus 37 (step S2). Next, the control part 30 brakes the motor to stop the rotation of dewatering tank 4 immediately before the washings Q reach at the deep position according to the detected biased position (step S3).
- the control part 30 causes the dewatering tank 4 to stop rotating immediately before the washings Q biased in the dewatering tank 4 is located at a side opposite to, relative to the central axis 17, the liquid biased towards the lower side Z2 in the balancing ring 19. Therefore, after the dewatering tank 4 is stopped, the washings Q biased in the dewatering tank 4 and the liquid biased towards the lower side Z2 in the balancing ring 19 are maintained at a state of being located at roughly opposite sides relative to the central axis 17. In addition, since the dewatering tank 4 is supported through a one-way bearing in a unidirectional rotation manner, the stopped dewatering tank 4 does not reverse, and is in a static state.
- FIG. 8 is a flow chart illustrating a control action in the first acceleration stage.
- the control part 30 causes the motor 6 to accelerate to reach a target rotating speed (i.e.,120rpm) so as to start the dewatering operation (step S11).
- a target rotating speed i.e.,120rpm
- the control part 30 enables a count value n with an initial value "zero” to add by 1 (+1) (step S13). Then, the control part 30 starts detection 1 in the first acceleration stage (step S14).
- step S15 When detection 1 is "OK” ("yes” in step S15), that is, under a condition that the control part 30 determines that the washings Q are not biased, the control part 30 resets the count value n to zero (step S17) if detection 1 is ended ("yes” in step S16). Then, when the rotating speed of the motor 6 reaches 120rpm ("yes" in step S18), the control part 30 causes the motor 6 to rotate steadily at 120rpm (step S19).
- FIG. 9A and FIG. 9B are flow charts illustrating a control action regarding detection 1.
- the control part 30 starts detection 1 in the above step S14, and once the interruption W is inputted ("yes" in step S21), a timing value An is obtained (step S22).
- the timing value An is referred to as An below.
- An is the interval I between the inputted interruption W and the previous interruption W (referring to FIG. 3 ) and is a positive value measured by the timer 33. Under a condition that there does not exist a previous interruption W, the interval I from a start time of detection 1 to the initial interruption W is An.
- the control part 30 calculates a moving average value B n of An (step S23).
- the moving average value B n is sometimes referred to as B n .
- B n is a value obtained by dividing a summing value of An and previous A n-1 ⁇ A n-5 by 6.
- 6 is divided so as to be in combination with the situation that there exists six interruptions W during the period R from the time that the pulse P disappears to the time that the next pulse P is produced and then disappears (referring to FIG. 3 ).
- control part 30 calculates a moving average value C n of B n (step S24).
- the moving average value C n is sometimes referred to as C n .
- C n is a value obtained by dividing a summing value of B n and previous B n-1 ⁇ B n-5 by 6.
- the control part 30 In an acceleration state of the motor 6 for accelerating to the target rotating speed, the control part 30 enables the count value n to be added by 1 in step S13 (referring to FIG. 8 ) once the interruption W is inputted, and obtains C n successively in step S24. Therefore, in fact, the operation for adding the count value n by 1 and the operation for obtaining C n are conducted simultaneously. That is, the control part 30 enables the count value n to be added by 1 every time C n is obtained.
- the obtained A n ⁇ C n are not stable until the count value n reaches a specified starting value ("no" in step S25), and the count value n is inapplicable to detection 1.
- the starting value refers to, such as, 75, in the present embodiment.
- the control part 30 calculates a difference D n obtained by subtracting the previous C n-1 from C n (step S26). Then, the control part 30 calculates a moving average value E n of the difference D n (step S27).
- the moving average value E n is a value obtained by dividing a summing value of the difference D n and previous differences D n-1 ⁇ D n-5 by 6.
- the difference D n is referred to as D n
- the moving average value E n is referred to as E n .
- E 17 the count value n of which is consistent with that of C 17 , is a value obtained by dividing D 12 ⁇ D 17 by 6.
- E 17 may be expressed with C n as shown in the following formula (1), and may be expressed with B n as shown in the following formula (2).
- E 17 B 12 + B 13 + B 14 + B 15 + B 16 + B 17 ⁇ B 6 + B 7 + B 8 + B 9 + B 10 + B 11 / 36
- E n is equivalent to a difference of a summing value of B n ⁇ B n+5 related to six interruptions W produced when a certain NS group passes one Hall IC40 and a summing value of B n+6 ⁇ B n+11 related to six interruptions W produced when a next NS group passes the Hall IC40.
- An error due to a relevant position of the adjacent NS groups can be roughly eliminated through E n calculated with multiple B n .
- FIG. 10 is a diagram illustrating a relationship between a count value n and C n , where a horizontal axis indicates the count value n, and a vertical axis indicates C n .
- An decreases with a rotating speed increase caused by the acceleration of the motor 6, the change of An is disordered due to the installation error of the NS group and the installation error of each Hall IC40.
- the actual An increases and decreases as shown by the dotted line.
- B n is obtained through the moving average in S23 with the installation error of each Hall IC40 being eliminated, and C n is obtained through the moving average in S24 with the noise of Bn being eliminated.
- D n is obtained through C n
- E n is obtained through D n .
- An, B n , C n , D n and E n are relevant information values regarding the rotation state of the motor 6.
- C n should decrease with the increase of the rotating speed of the motor 6 (referring to an arrow in a dot and dash line), as shown by a solid line in FIG. 10 .
- An and B n should also decreas with the increase of the rotating speed of the motor 6 although both of An and B n have noise respectively.
- the accumulated value G is also an accumulated value of the moving average value E n of the difference D n between C n and C n-1 in the case that C n is greater than the previous C n-1 .
- FIG. 11 is a diagram illustrating a relationship between the count value n and the accumulated value G, where a horizontal axis indicates the count value n, and a vertical axis indicates the accumulated value G.
- the motor 6 accelerates while the dewatering tank 4 eccentrically rotates continuously, the accumulated value G increases stepwise, as shown in FIG. 11 .
- first thresholds are determined according to each specified count value n.
- the first thresholds are correlated with the count value n and stored in the memory 32 (referring to FIG. 2 ).
- the first thresholds are positive values.
- control part 30 sets the detection result as NG, and determines that the dewatering tank 4 is largely eccentric and the washings Q are biased (step S33).
- step S34 determines that the washings Q are not biased. Then, the control part 30 carries out steps S21 ⁇ S34 repeatedly, until the count value n becomes an end value indicating that the first acceleration stage is ended ("no" in step S35).
- the end value of the count value n in the present embodiment is, for example, 245.
- detection 1 is ended by the control part 30 (step S36).
- steps S21 ⁇ S34 are equivalent to the process of the above step S15, and the processes of steps S35 ⁇ S36 are equivalent to the process of the above step S16 (referring to FIG. 8 ).
- FIG. 12 is a flow chart illustrating a control action in the case that the detection result is NG.
- the control part 30 causes the motor 6 to stop rotating (step S41), i.e. causes the dewatering tank 4 to stop rotating, when the detection result is determined as NG.
- the eccentric rotation of the dewatering tank 4 can be inhibited early when the motor 6 is in the acceleration state.
- the control part 30 prior to calculating the accumulated value G, the control part 30 first corrects a calculation basis (i.e., An) of the accumulated value G through performing the moving average in step S23 and step S24 repeatedly. Therefore, C n obtained as a correction result becomes a high precision value with the error being eliminated. Therefore, an accumulated value G with high precision is calculated according to C n , the precision of which is improved through the correction, and the bias of the washings Q is detected with high precision through the accumulated value G, thus the eccentric rotation of the dewatering tank 4 can be inhibited early.
- a calculation basis i.e., An
- the control part 30 determines whether the current state is a state before the dewatering operation is restarted (step S42).
- Restarting of the dewatering operation refers to a restarting process, through which the control part 30 starts the dewatering operation again by enabling the dewatering tank 4 to rotate again immediately after the dewatering tank 4 is caused to stop rotating to suspend the dewatering operation.
- the restarting process may also be conducted even if the biasing of the washings Q is small.
- step S43 Before the restarting of the restarting process is implemented ("yes" in step S42), the control part 30 performs the restarting process (step S43). It shall be noted that, prior to the restarting process, a drainage can be first conducted in the outer tank 3. In the case that the drainage pipeline 15 is jammed with foams, the foams can be discharged outside of the drainage pipeline 15 through the drainage herein, and thus, the situation that the drainage pipeline 15 is jammed with the foams can be eliminated.
- step S44 the control part 30 performs a correction process (step S44).
- the control part 30 closes the drainage valve 16 and opens the feeding valve 14 so as to feed water into the dewatering tank 4 to a specified water level, so that the washings Q in the dewatering tank 4 are immerged into water and are easy to loosen.
- the control part 30 causes the washings Q attached to the internal circumferential surface of the dewatering tank 4 to peel off and stir by causing the dewatering tank 4 and the rotary wing 5 to rotate, thereby correcting the biasing of the washings Q in the dewatering tank 4.
- control part 30 performs either the restarting process or the correction process alternatively in the case that the dewatering tank 4 has stopped rotating. If the biasing of the washings Q is small enough so that the dewatering tank 4 does not rotate eccentrically, the dewatering is started again through the restarting process. Therefore, a time required in the whole dewatering process can be shortened as far as possible. If the biasing of the washings Q is large enough so that the dewatering tank 4 rotates eccentrically again in the next dewatering process, the biasing of the washings Q can be reliably corrected through the correction process.
- the control part 30 After performing the restarting process for a specified number (which is 1 herein) and enabling the dewatering tank 4 to stop rotating ("no" in step S42), the control part 30 selects to not perform the restarting process and selects to perform the correction process (step S44). That is, in the case that the restarting process has been performed for the specified number and the dewatering tank 4 has stopped rotating, the biasing of the washings Q is large and needs to be corrected. In this case, the correction process is quickly performed rather than spending time on the restarting process and stopping the rotation of the dewatering tank 4. Therefore, the biasing is corrected reliably. Therefore, the eccentric rotation of the dewatering tank 4 can be inhibited early. It shall be noted that, in the present embodiment, although the specified time is set as 1, it can also be set as more than 2.
- FIG. 13 is a flow chart illustrating a control action in the third acceleration stage.
- the control part 30 causes the motor 6 to accelerate to a target rotation speed of 240rpm at the second acceleration stage (step S51).
- the control part 30 enables the count value n to add by 1 (step S53) once the interruption W is inputted ("yes" in step S52). It shall be noted that, the count value n at the beginning of the second acceleration stage is zero.
- step S54 the control part 30 starts detection 2 (step S54).
- detection 2 is OK ("yes" in step S55)
- the control part 30 resets the count value n to zero (step S57) at the end of detection 2 ("yes" in step S56).
- the control part 30 causes the motor 6 to rotate steadily at 240rpm (step S59).
- the content of detection 2 is the same as that of detection 1. Therefore, the processes of above steps S21 ⁇ S34 are equivalent to the process of step S55, and the processes of step S35 and S36 are equivalent to the process of step S56 (referring to FIG. 9B ).
- the first threshold in detection 2 is set as to be different from that in detection 1.
- the starting value in step S25 is accordingly less than the starting value in detection 1, which is, for example, 17 in the present embodiment.
- step S55 the control part 30 performs the processes of steps S41 ⁇ S44 as it did in detection 1 (referring to FIG. 12 ).
- the duration of the steady rotation at 120rpm (referring to FIG. 4 ) can be shortened to be shorter than the duration of the steady rotation at 120rpm of the previous dewatering operation which is stopped.
- the duration of the steady rotation at 120rpm can be shortened.
- the time of the dewatering operation can be shortened.
- FIG. 14 is a flow chart illustrating a control action in the third acceleration stage.
- the control part 30 causes the motor 6 to accelerate to a target rotating speed 800rpm in the third acceleration stage (step S61).
- the control part 30 enables the count value n to be added by 1 (step S63) once the interruption W is inputted ("yes" in step S62).
- the count value n at the beginning of the third acceleration stage is zero.
- the control part 30 starts detection 3 (step S64).
- detection 3 is OK ("yes" in step S65)
- the control part 30 stops detection 3 when the rotating speed of the motor 6 reaches 800rpm ("yes” in step S66), and resets the count value n as zero, so that the motor 6 rotates steadily at 800rpm to continue to dewater (step S67).
- the content of detection 3 is substantively the same as those of detections 1 and 2. Therefore, the processes of the above steps S21 ⁇ S34 are equivalent to the process of step S65 (referring to FIG. 9A and FIG. 9B ).
- the first threshold in detection 3 is set as to be different from those of detections 1 and 2 respectively. It shall be noted that, the starting value in step S25 (referring to FIG. 9A ) in detection 3 is the same as that in detection 2. In the case that the detection result of detection 3 is NG ("no" in step S65), that is, in the case that the control part 30 determines that the washings Q in the dewatering tank 4 are biased, the control part 30 also performs the processes of steps S41 ⁇ S44 as it does in detections 1 and 2 (referring to FIG. 12 ).
- the duration of the steady rotation at 120rpm may be shortened to be shorter than the duration of the steady rotation at 120rpm of the previous dewatering operation which is stopped.
- the difference between detection 3 and detections 1, 2 lies in: after n becomes the end value in step S35 (referring to FIG. 9B ), the processes in step S21 ⁇ step S34 may also be repeated during the period that the rotating speed of the motor 6 reaches 800rpm. At the beginning of repeating such processes, respective values of n and A n ⁇ G are reset to zero.
- the control part 30 acquires information values of A n ⁇ E n and the like respectively, enables the count value to be added by 1 so as to calculate the accumulated value G.
- the control part 30 determines that the washings Q are biased in the dewatering tank 4 and causes the dewatering tank 4 to stop rotating. That is, since the detection of the biasing of the washings Q begins in the first acceleration stage after the motor 6 starts to rotate, eccentric rotation of the dewatering tank 4 may be inhibited early.
- the detection of the biasing of the washings Q is carried out in three stages in a sequence of the first acceleration stage, the second acceleration stage, and the third acceleration stage, the biasing of the washings Q can be reliably detected, so that eccentric rotation of the dewatering tank 4 may be inhibited as early as possible.
- the control part 30 executes detection in a first mode. As described above, In the detection in the first mode, the biasing of the washings Q in the dewatering tank 4 is detected according to whether the accumulated value G reaches the first threshold. The control part 30 may also execute a detection in a second mode rather than executing the detection in the first mode. In the detection in the second mode, the biasing of the washings Q is detected according to whether a variation of the accumulated value G reaches a third threshold. Different from the first threshold, the third threshold is preset and stored in the memory 32 (referring to FIG. 2 ). The third threshold is a positive value.
- the control part 30 determines that the washings Q are biased and causes the dewatering tank 4 to stop rotating.
- the accumulated value G may always be small and fails to reach the first threshold no matter whether the dewatering tank 4 is in a state of large amplitude vibration, and with such situation, state variation of the washings Q during dewatering may also be sensitively reflected by focusing on the variation of the accumulated value G. Therefore, the eccentric rotation of the dewatering tank 4 can be reliably inhibited early.
- the detection in the second mode not only can be executed in detection 3, but also can be executed in detection 1 and detection 2.
- Detection 4 consists of detection 4-1 and detection 4-2.
- Detections 1-3 are detections for detecting the biasing of the washings Q by using interruption W related to the motor 6 in an acceleration state.
- detection 4-1 and detection 4-2 are detections for detecting the biasing of washings Q by using the duty ratio.
- FIG. 15 is a flow chart illustrating schemas of detection 4-1 and detection 4-2.
- control part 30 causes the motor 6 to accelerate from 240rpm to 800rpm in step S61 (referring to FIG. 14 ).
- the control part 30 acquires a duty ratio of the voltage applied to the motor 6 at this moment as ⁇ value (step S71).
- the rotating speed 300rpm does not refer to a rotating speed in a state that water is stored in the dewatering tank 4, but refers to a rotating speed which is not influenced by eccentricity of the dewatering tank 4 most.
- the ⁇ value at 300rpm is the duty ratio in a state that it is not influenced by eccentricity of the dewatering tank 4 most, but only is influenced by a load of the washings Q.
- step S72 the control part 30 implements detection 4-1 (step S72).
- detection 4-1 is not OK ("no" in step S72)
- the control part 30 executes the processes in step S41 ⁇ step S44 as it does in detections 1-3 (referring to FIG. 12 ).
- the duration of the steady rotation at 120rpm may be shortened to be shorter than the duration of the steady rotation at 120rpm of the previous dewatering operation which is stopped.
- step S72 under a condition that detection 4-1 is OK ("yes" in step S72), that is, under a condition that the control part 30 determines in detection 4-1 that the washings Q are not biased, the control part 30 continues to implement detection 4-2 in a state that the motor 6 continues to accelerate from 730rpm (step S77).
- step S77 Under a condition that detection 4-2 is OK ("yes" in step S77), that is, under a condition that the control part 30 determines in detection 4-2 that the washings Q are not biased, the control part 30 causes the motor 6 to stably rotate at 800rpm after accelerating the motor 6 to the target rotating speed of 800rpm, so as to cause the washings Q to be dewatered continuously (step S78).
- step S77 under a condition that detection 4-2 is not OK ("no" in step S77), that is, under a condition that the control part 30 determines that the washings Q are biased, the control part 30 causes the motor 6 to stably rotate at a rotating speed less than 800rpm, so as to cause the washings Q to be dewatered continuously (step S79).
- detection 4-1 and detection 4-2 are described in detail respectively.
- FIG. 16 is a flow chart illustrating a control action with respect to detection 4-1.
- the control part 30 starts to carry out detection 4-1 (step S80) as the rotating speed of the motor 6 reaches 600rpm.
- control part 30 starts to count through the counter 34 (step S81), and initializes the counter 34 every 0.3s so as to count within 0.3s (step S82 and step S83).
- the control part 30 acquires the rotating speed of the motor 6 at the time of each counting and a duty ratio d m (m: a count value) of the voltage applied to the motor 6 at the time of counting (step S84). That is, the control part 30 acquires the rotating speed and the duty ratio d m of the motor 6 at specified moment in the third acceleration stage in which the rotating speed of the motor 6 rises from 240rpm to 800rpm.
- the duty ratio d m is an information value related to the rotation state of the motor 6.
- step S84 the control part 30 calculates a correction value B m according to the following formula (3), where B m is obtained by correcting the duty ratio d m with the ⁇ value.
- B m d m ⁇ ⁇ ⁇ X + Y
- the control part 30 calculates a moving accumulated value C m (m: count value) of the correction value B m .
- the moving accumulated value C m is a value obtained by summing 5 consecutive correction values B m in a counting sequence. Additionally, as for a certain moving accumulated value C m and a moving accumulated value C m-1 previous to C m , the last 4 correction values B m among the 5 correction values B m for forming the moving accumulated value C m-1 and the front 4 correction values B m among the 5 correction values B m for forming the moving accumulated value C m are same values respectively. It shall be noted that the number of the correction values B m for forming the moving accumulated value C m is not limited to 5.
- the moving accumulated value C m is a specified index value transformed from the duty ratio d m by the control part 30.
- the control part 30 calculates a second threshold (step S85) related to the moving accumulated value C m according to the following formula (4).
- the second threshold is a positive value.
- the second threshold rotating speed ⁇ a + b a and b in the formula (4) are constants solved through experiments and the like and stored in the memory 32.
- the constants a, b are different depending on the rotating speed of the motor 6 at the current moment and a selected dewatering condition.
- the second threshold herein, multiple values exist at the same rotating speed.
- the second threshold is a value not influenced by the ⁇ value, and this case is further defined through the formula (4).
- control part 30 confirms whether the rotating speed of the motor 6 at the current moment is less than 730rpm (step S86).
- control part 30 determines whether a newest moving accumulated value C m falls in the range of detection 4-1 (step S87).
- FIG. 17 is a diagram illustrating a relationship between the rotating speed and the moving accumulated value C m in combination with detection 4-1 and detection 4-2.
- a horizontal axis represents the rotating speed (unit: rpm)
- a longitudinal axis represents the moving accumulated value C m .
- the second thresholds calculated in step S85 are set to be two thresholds including an upper second threshold represented by a dot dash line and a lower second threshold represented by a double dot dash line.
- the upper second threshold is higher than the lower second threshold.
- the upper second threshold and the lower second threshold vary along with the rotating speed.
- dewatering conditions there exists the following three dewatering conditions: carrying out the dewatering operation after “water storage rinsing" of rinsing the washings Q with the water stored in the dewatering tank 4; "water splashing and dewatering” of carrying out the dewatering operation by draining water when splashing the water to the washings Q; the above “restarting process”, etc.
- the dewatering conditions are selected by the user through operating the operation part 10, and the selection is received by the control part 30.
- the control part 30 uses the upper second threshold higher than the lower second threshold because it is difficult to execute detection with the lower second threshold.
- the control part 30 uses the lower second threshold lower than the upper second threshold because the detection is not accurate if the upper second threshold is used.
- the control part 30 uses the upper second threshold higher than the lower second threshold in detection 4-1 because it is difficult to execute the detection with the lower second threshold.
- the control part 30 uses the lower second threshold lower than the upper second threshold in detection 4-1 because the detection is not accurate if the upper second threshold is used.
- detection 4-1 is executed with the second threshold suitable for different loads of the washings Q respectively.
- the moving accumulated value C m at each rotating speed is larger. If the washings Q are greatly biased, the moving accumulated value C m is larger than the set second threshold, i.e. a corresponding one of the upper second threshold and the lower second threshold.
- the control part 30 determines that the washings Q are biased in the dewatering tank 4 and the moving accumulated value C m falls in the range of detection 4-1 ("yes" in step S87).
- step S87 When the control part 30 determines that the moving accumulated value C m falls in the range of detection 4-1 ("yes" in step S87), the processes in steps S41 ⁇ S44 will be executed (referring to FIG. 12 ). The processes in steps S80 ⁇ S87 are included in the above step S72 (referring to FIG. 15 ).
- control part 30 ends detection 4-1 and then starts detection 4-2 (step S88) when the rotating speed of the motor 6 reaches 730rpm ("no" in step S86).
- FIG. 18 is a flow chart illustrating a control action regarding detection 4-2.
- the control part 30 starts detection 4-2 (step S88) as the rotating speed of the motor 6 reaches 730rpm.
- control part 30 starts to count through the counter 34 (step S89), and initializes the counter 34 per 0.3s so as to carry out counting within each 0.3s (steps S90 ⁇ S91).
- control part 30 acquires the rotating speed of the motor 6 at the time of each counting and the duty ratio d m of the voltage applied to the motor 6 at the time of counting, and calculates the correction value B m and the moving accumulated value C m (step S92).
- the control part 30 calculates the second threshold (step S93) related to the moving accumulated value C m according to the formula (4).
- the constants "a", "b” included in the formula are same as those used in detection 4-1, and are different depending on the rotating speed of the motor 6 at the current moment and the selected dewatering condition. Therefore, at the same rotating speed, the second threshold herein may have multiple values like the upper second threshold and the lower second threshold described above.
- control part 30 confirms whether the rotating speed of the motor 6 at the current moment reaches the target rotating speed (800rpm) (step S94).
- control part 30 determines whether the newest moving accumulated value C m falls in the range of the detection 4-2 (step S95) as it does in detection 4-1 (step S87).
- the moving accumulated value C m for each rotating speed is larger. If the washings Q are greatly biased, the moving accumulated value C m is larger than the set second thresholds, i.e., a corresponding one of the upper second threshold and the lower second threshold.
- control part 30 determines that the washings Q are biased in the dewatering tank 4 and the moving accumulated value C m falls in the range of detection 4-2 ("yes" in step S95).
- step S95 When it is determined that the moving accumulated value C m falls in the range of detection 4-2 ("yes" in step S95), the control part 30 acquires the rotating speed L of the motor 6 (step S96) at the judged time point, i.e., the time point when it is detected in detection 4-2 that the washings Q are biased.
- control part 30 causes the motor 6 to stably rotate at the acquired rotating speed L, strictly speaking, a rotating speed obtained by rounding off the digit in the units position of the rotating speed L, so that the washings Q are continuously dewatered (step S79). At this moment, the control part 30 prolongs dewatering time at the rotating speed L so as to obtain a dewatering effect same as that obtained through the dewatering at the original target rotating speed of 800rpm.
- control part 30 ends detection 4-2 and causes the motor 6 to stably rotate at 800rpm so as to continue to dewater the washings Q (the above step S78) when the rotating speed of the motor 6 reaches the target rotating speed ("no" in step S94).
- the biasing of the washings Q in the dewatering tank 4 is double detected in a mode adopting information values (such as C n ) and the first threshold (i.e., detections 1 ⁇ 3), and a mode adopting the duty ratio d m and the second thresholds (i.e., detection 4), so that eccentric rotation of the dewatering tank 4 may be reliably inhibited early.
- FIG. 19 is a flow chart illustrating a first modification of the control action of detection 3 in the third acceleration stage. It shall be noted that, throughout the drawings including FIG. 19 , same reference numerals are used for same steps in other diagrams, and detailed description with respect to the repeated steps is omitted.
- the control part 30 causes the motor 6 to accelerate to the target rotating speed of 800rpm (step S61), and enabled the count value "n" to be added by 1 (step S63) once the interruption W is inputted ("yes" in step S62).
- the control part 30 starts detection 3 (step S64).
- step S65 the control part 30 ends detection 3 and resets the count value n to zero when the rotating speed of the motor 6 reaches 800rpm ("yes” in step S66), so that the motor 6 stably rotates at 800rpm, and dewatering continues (step S67).
- the control part 30 monitors a maximum G max of G when the rotating speed of the motor 6 is 250 ⁇ 300rpm (step S68). With respect to the maximum G max , a specified reference value smaller than the first threshold is set and stored in the memory 32. If the maximum G max does not exceed the reference value ("yes" in step S68), the control part 30 increases all of the second thresholds adopted in detection 4 (step S69).
- the dewatering tank 4 is at least in a state of being in static balance. If the dewatering tank 4 is in a state that the balance can be achieved statically or dynamically, although it is OK in both of detection 3 and detection 4, longitudinal shaking of the dewatering tank 4 may also be sensitively detected by the concurrently executed detection 4 even if detection 3 is OK in a state of dynamic imbalance. Thus, it can be imagined that, if the C m in detection 4 is too large, the NG is caused. As a result, a poor condition of rotation stopping of the dewatering tank 4 may occur when detection 4 is carried out although vibrations of the outer tank 3 and the dewatering tank 4 are not large.
- control part 30 estimates that the vibrations of the outer tank 3 and the dewatering tank 4 are not large and carries out a control of widening the second thresholds of detection 4 in step S69 as long as the maximum G max in detection 3 is a low value below the reference value ("yes" in step S68). That is, error detection of detection 4 adopting the duty ratio d m is prevented through detection 3.
- FIG. 20 relates to a second modification of the control action in detection 3, and is a schematic diagram illustrating the interior of the dewatering tank 4 in the dewatering operation.
- the washings Q in the dewatering tank 4 might be arranged in the dewatering tank 4 with a first washing Q1 and a second washing Q2 being placed at a half of the dewatering tank 4 relative to the central axis 17.
- the dewatering tank 4 rotates at the high speed of 800rpm in the state, the dewatering tank 4 which is perfectly round initially deforms into an elliptic shape with a long edge formed in an opposite position direction of the first washing Q1 and the second washing Q2, as shown in FIG. 20 (b) , and may contact with the circumferential wall 3A of the outer tank 3.
- control of detection 3 of the second modification shown in FIG. 21 may be implemented.
- the control part 30 causes the motor 6 to accelerate to the target rotating speed of 800rpm (step S61), and enables the count value n to be added by 1 (step S63) once the interruption W is inputted ("yes" in step S62), as it does in detection 3.
- the control part 30 starts detection 3 (step S64).
- the control part 30 ends detection 3, resets the count value n to zero and causes the motor 6 to steadily rotate at 800rpm so as to continuously carry out dewatering (step S67) when the rotating speed of the motor 6 reaches 800rpm ("yes" in step S66).
- a specified first reference value smaller than the first threshold is set; with respect to the maximum G max in detection 2, a specified second reference value smaller than the first reference value is set; and with respect to the maximum G max in detection 3 when the rotating speed of the motor 6 is 250 ⁇ 300rpm, a specified third reference value smaller than the second threshold is set.
- the first reference value -the third reference value are stored in the memory 32.
- the previous maximum G max in detection 1 never exceeds the first reference value ("yes" in step S101)
- the previous maximum G max in detection 2 never exceeds the second reference value ("yes” in step S102)
- the control part 30 decreases all the second thresholds in detection 4 (step S104).
- the washings Q in the dewatering tank 4 may be in a state of being evenly distributed in the dewatering tank 4 or in a state of being tidily divided into two parts, as shown in FIG. 20 .
- the control part 30 decreases the second thresholds (step S104) if the washings Q in the dewatering tank 4 are assumed to be in a state of being divided into two parts. Therefore, in detection 4 which is executed in parallel with detection 3, before the dewatering tank 4 deforms greatly toward the elliptic shape, detection 4-2 is enabled to be NG in step S95, so as to continue the dewatering operation at the rotating speed that makes the dewatering tank 4 not contact with the outer tank 3 in step S79 (referring to FIG. 18 ).
- the control part 30 properly changes the second thresholds according to the maximum G max of the accumulated values G in at least one of the first acceleration stage, the second acceleration stage and the third acceleration stage. Therefore, by changing the second thresholds to be suitable for the current situation in the dewatering tank 4, the biasing of the washings Q may be detected with high accuracy, so that eccentric rotation of the dewatering tank 4 is inhibited early. It shall be noted that, controls of the modification 1 and the modification 2 may also be carried out in parallel.
- FIG. 22 and FIG. 23 are flow charts illustrating a control action of a third modification in the dewatering operation.
- the dewatering machine 1 may electrically detect eccentric rotation of the dewatering tank 4 through detections 1 ⁇ 4, and may also mechanically detect eccentric rotation of the dewatering tank 4 through the safety switch 36. That is, the biasing of the washings Q may be double detected in an electric mode and a mechanical mode.
- the electric mode is a mode of carrying out detection based on a relationship of information values (i.e., the accumulated value G, the moving accumulated value C m , the first threshold and the second threshold) related to the rotation state of the motor 6 at 800rpm
- the mechanical mode is a mode of carrying out detection through contact between the safety switch 36 and the outer tank 3. Therefore, either in the case that it is determined in detections 1 ⁇ 4 that the washings Q are biased, or in the case that the eccentric rotation of the dewatering tank 4 is detected by the safety switch 36, the control part 30 causes the dewatering tank 4 to stop rotating.
- Both of the mechanical mode and the electric mode are expected to detect eccentric rotation of the dewatering tank 4 at a same moment.
- the first thresholds and the second thresholds of some dewatering machines 1 may not be proper.
- the mechanical detection and the electrical detection there is a time deviation between the mechanical detection and the electrical detection.
- the deviation may be eliminated by correcting the first thresholds and the second thresholds.
- the control part 30 causes the dewatering tank 4 to rotate and start dewatering as the initial dewatering operation after shipment starts (step S111). Along with starting of dewatering, detection 1 is carried out in the first stage. At this time, when the safety switch 36 is switched to "on" ("yes" in step S112), the control part 30 uses the count value n at this time as n x and uses the accumulated value G at this time as G x (step S113).
- the first threshold when the count value n is n x is a value acquired by subtracting the first specified value from n x in the present embodiment.
- the first specified value is a positive value.
- the control part 30 determines whether a value obtained by subtracting G x from the previous first threshold is above a second specified value J (step S114).
- the second specified value J is a positive value.
- the first threshold may be determined as proper, and the control part 30 continuously carries out operation without changing the first threshold (step S 115).
- step S 114 In the case that the difference between the first threshold and G x is above the second specified value J ("yes" in step S 114), it can be determined that there exists a time deviation between the moment at which the eccentric rotation is detected by detection 1 and the moment at which the eccentric rotation is detected by the safety switch 36. Therefore, it can be determined that the moment at which the eccentric rotation is detected by detection 1 may be slower than that at which the eccentric rotation is detected by the safety switch 36.
- the control part 30 enables a correction alternate value U, the factory default of which is zero, to be added by 1 temporarily (step S116). If the correction alternate value U added by 1 is smaller than a specified upper limit value (which is 3 herein) ("no" in step S1117), the control part 30 does not change the first threshold and enables operation to continue (step S118).
- step S 117 if the correction alternate value U added by 1 reaches the upper limit value ("yes" in step S 117), the current first threshold is not proper because there apparently exists a time deviation between the moment at which the eccentric rotation is detected by detection 1 and the moment at which the eccentric rotation is detected by the safety switch 36. Therefore, the control part 30 sets a value acquired by subtracting the second specified value J from the first threshold as a new first threshold, so as to change and decrease the first threshold (step S 119). Next, the control part 30 resets the correction alternate value U to zero (step S120) and enables operation to continue (step S121).
- step S114 if a difference between the accumulated value G x and the first threshold when eccentric rotation of the dewatering tank 4 is detected by the safety switch 36 is above a specified value ("yes" in step S114), the control part 30 corrects the first threshold (step S119). Therefore, in detection 1 of dewatering after the first threshold being corrected, whether the washings Q are biased may be detected with high accuracy through the corrected first threshold, so that eccentric rotation of the dewatering tank 4 is inhibited early.
- step S 112 Under a condition that the safety switch 36 is not started ("no" in step S 112), if the accumulated value G does not exceed the first threshold ("no" in step S113), the control part 30 does not change the correction alternate value which is zero initially (step S132) and enables the operation to continue (step S133).
- the control part 30 sets the count value n at this moment to be n y and set the accumulated value G at this moment to be G y .
- the first threshold when the count value n is n y is a value acquired by subtracting the first specified value from n y in the present embodiment.
- the control part 30 determines whether G y is above a value T obtained by adding the first threshold and a third specified value together (step S135).
- the third specified value is a positive value.
- the control part 30 does not change the first threshold and enables the operation to continue (step S136).
- step S135 Under a condition that G y is above T ("yes" in step S135), it can be determined that there exists a time deviation between the moment at which the eccentric rotation is detected by detection 1 and the moment at which the eccentric rotation is detected by the safety switch 36, and the moment at which the eccentric rotation is detected by detection 1 is much earlier than that at which the eccentric rotation is detected by the safety switch 36. However, since the deviation might have occurred by accident, the control part 30 enables a correction alternate value V to be added by 1 temporarily (step S137). Under a condition that the correction alternate value V added by 1 is less than a specified upper limit value (which is 3 herein) ("no" in step S138), the control part 30 does not change the first threshold and enables the operation to continue (step S139).
- a specified upper limit value which is 3 herein
- the control part 30 sets a value obtained by adding the first threshold and the third specified value together to be a new first threshold, thereby changing the first threshold and enabling the first threshold to be widened (step S140).
- the control part 30 resets the correction alternate value V to zero (step S141) and enables the operation to continue (step S142).
- step S140 the first threshold is corrected (step S140).
- biasing of the washings Q may be detected with high accuracy through the corrected first threshold, so that eccentric rotation of the dewatering tank 4 is inhibited early.
- the modification 3 may also be combined with modification 1 and modification 2.
- a fourth modification With respect to the safety switch 36, the following conditions may be imagined: although vibration of the dewatering tank 4 is not so large, due to a moving mode of the outer tank 3, the safety switch 36 may be started by light contact with the outer tank 3. In order to prevent the dewatering tank 4 from stopping rotating caused by error detection of such mechanical mode, a control action of the fourth modification is carried out in parallel with detection 1.
- a threshold different from the first threshold, is used (which is set to be a fourth threshold).
- the fourth threshold may also be a value same as the first threshold. However, preferably, the fourth threshold is a value lower than the first threshold. In the following, description is made on a premise that the fourth threshold is slightly less than the first threshold.
- FIG. 24 is a flow chart illustrating a control action of the fourth modification.
- the control part 30 enables the dewatering tank 4 to rotate and starts dewatering (step S151) along with starting of the dewatering operation.
- detection 1 is carried out in the first acceleration stage.
- the control part 30 sets the accumulated value G at this time to be G z (step S153).
- the control part 30 determines whether G z is above the fourth threshold (step S154). If G z is above the fourth threshold ("yes" in step S154), a result of starting the safety switch 36, i.e., detection carried out by the safety switch 36, is normal since the moment at which eccentric rotation is detected by detection 1 and the moment at which eccentric rotation is detected by the safety switch 36 are deemed to be consistent approximately. Therefore, the control part 30 determines that the washings Q are biased and causes the dewatering tank 4 to stop rotating (step S155). It shall be noted that, since detection 1 is executed simultaneously, the control part 30 may also determine that the washings Q are biased (step S33 in FIG. 9B ) and cause the dewatering tank 4 to stop rotating (step S41 in FIG. 12 ) when the accumulated value G becomes above the first threshold ("yes" in step S32 in FIG. 9B ), even if the safety switch 36 is not started ("no" in step S152).
- step S 154 under a condition that G z when the safety switch 36 is started is less than the fourth threshold ("no" in step S 154), the control part 30 determines that vibration of the dewatering tank 4 is negligibly small, the safety switch 36 is considered to be subjected to false starting and the operation is continued (step S156). Therefore, a success rate of the dewatering operation may be improved.
- step S157 when the safety switch 36 is restarted while the operation is continuing hereafter, and the starting number of the safety switch 36 reach a specified number (which is 3 herein) from the beginning of dewatering operation ("yes" in step S157), the control part 30 determines that the safety switch 36 is started normally and the washings Q are biased, and causes the dewatering tank 4 to stop rotating (step S155). In other words, until times of eccentric rotation detected by the safety switch 36 before it is determined that the washings Q are biased reach the specified number ("no" in step S157), the control part 30 suspends rotation stopping of the dewatering tank 4, and the operation continues.
- a specified number which is 3 herein
- the specified number herein is not limited to 3 and may also be 1.
- the control action of the modification 4 is executed in the first acceleration stage where the rotating speed is low to an extent that no problem is generated even ignoring starting of the safety switch 36 in step S156.
- the modification 4 may also be combined with modification 1, modification 2 and modification 3.
- a modification 5, as a further modification of the modification 4, may also carry out the control action shown in FIG. 25 .
- steps S153 and S154 in modification 4 are omitted.
- the control part 30 may also determines that the safety switch 36 is started by mistake and causes the operation to continue (step S156) if the starting number of the safety switch 36 do not reach the specified number (which is 3 herein) ("no" in step S157).
- the control part 30 may cause the dewatering tank 4 to stop rotating (step S41 in FIG.
- step S32 in FIG. 9B the control part 30 may neglect starting of the safety switch 36 when the starting number is not greater than 2.
- step S157 when the starting number of the safety switch 36 reach 3 ("yes" in step S157), the control part 30 determines that a result detected by the safety switch 36 is normal and the washings Q are biased, thereby enabling the dewatering tank 4 to stop rotating (step S155). In other words, even in modification 5, like modification 4, until times of eccentric rotation detected by the safety switch 36 before it is determined that the washings Q are biased reaches the specified number ("no" in step S157), the control part 30 suspends rotation stopping of the dewatering tank 4, and the operation continues. Besides modification 4, modification 5 may also be combined with modifications 1 ⁇ 3. However, in modification 4, since false starting of the safety switch 36 is determined based on the fourth threshold less than the first threshold (referring to FIG. 24 ), the biasing of the washings Q may be determined earlier compared with modification 5 so as to cause the dewatering tank 4 to stop rotating.
- the motor 6 is controlled based on the duty ratio.
- the motor 6 is controlled based on the voltage applied to the motor 6 instead of the duty ratio.
- the accumulated value G is calculated based on the moving average value C n .
- the accumulated value G may also be calculated based on any information value of other information values such as An and B n , which may be reduced as the rotating speed of the motor 6 increases.
- the accumulated value G is an accumulated value of the moving average values E n
- the accumulated value G may also be an accumulated value of difference D n if influences including opposite position errors of NS groups do not exist.
- the duty ratio is acquired to perform determination, the acquired duty ratio may be original data of the acquired duty ratios, may also be a correction value corrected as needed and may also be an index value acquired by transforming the duty ratio just like the moving accumulated value C m .
Landscapes
- Engineering & Computer Science (AREA)
- Textile Engineering (AREA)
- Control Of Washing Machine And Dryer (AREA)
- Main Body Construction Of Washing Machines And Laundry Dryers (AREA)
Abstract
Description
- The present disclosure relates to a dewatering machine.
- A washing machine with a dewatering function is disclosed in the following
patent literature 1. In the washing machine, as for a cylindrical washing tank for containing washings, a central axis of the washing tank is obliquely arranged relative to a plumb line. Therefore, an upper part of the washing tank is obliquely configured in a manner of protruding towards a front side of the washing machine. - Patent literature 1: Japanese Patent Application Laid-open No.
2000-312795 - In a dewatering machine in which a dewatering tank for containing washings is biased like the washing machine in
patent literature 1, the washings are easy to bias in the dewatering tank. If dewatering operation is conducted in a state that the washings are biased, the dewatering tank will conduct eccentric rotation, thereby causing a vibration. Therefore, in the dewatering machine, it is aimed to inhibit the eccentric rotation of the dewatering tank early, so as to avoid vibration as much as possible. - The present disclosure is made on the basis of the background and aims to provide a washing machine capable of inhibiting eccentric rotation of a biased dewatering tank early.
- The present disclosure provides a dewatering machine, including: a dewatering tank, formed in a cylindrical shape with a central axis extending in a direction inclined relative to an up-down direction, the dewatering tank is configured to contain washings, and rotate around the central axis so as to dewater the washings; a balancing ring, formed in a hollow annular shape, the balancing ring is coaxially arranged in the dewatering tank, and liquid for achieving rotational balance of the dewatering tank is contained in the balancing ring and flows freely; and a dewatering preparation unit, configured to cause the dewatering tank, in a dewatering preparation stage for the washings, to rotate at a rotating speed lower than a lowest rotating speed at which the dewatering tank resonates, so as to detect a biased position of the washings in the dewatering tank; and cause the dewatering tank to stop rotating immediately before the washings biased in the dewatering tank are positioned, relative to the central axis, at an opposite side of the liquid biased downward in the balancing ring.
- In addition, the present disclosure provides a dewatering machine, including: a dewatering tank, formed in a cylindrical shape with a central axis extending in a direction inclined relative to an up-down direction, the dewatering tank is configured to contain washings, and rotate around the central axis so as to dewater the washings; an electric motor, configured to cause the dewatering tank to rotate; an information value acquisition unit, configured to, when the electric motor is in an acceleration state of accelerating to a target rotating speed used for formally dewatering the washings, sequentially acquire an information value that should be decreased as a rotating speed of the electric motor increases; a counting unit, configured to add a count value with an initial value of zero by 1 once the information value acquisition unit acquires the information value; a calculation unit, configured to calculate an accumulated value of a difference between the information value and a previous information value under a condition that the information value is larger than the previous information value; a determination unit, configured to determine that the washings are biased in the dewatering tank when the accumulated value with the count value of a specified value reaches a first threshold with the count value of the specified value; and a stopping unit, configured to cause the dewatering tank to stop rotating when it is determined by the determination unit that the washings are biased.
- In addition, the dewatering machine according to the present disclosure further includes an information correction unit, configured to correct the information value through moving average before the accumulated value is calculated by the calculation unit.
- In addition, the dewatering machine according to the present disclosure further includes an execution unit, the execution unit is configured to alternatively execute any of a restarting process and a correction process under a condition that the dewatering tank is stopped rotating through the stopping unit, the restarting process is a process for restarting to dewater the washings by causing the dewatering tank to rotate again, and the correction process is a process for correcting the biasing of the washings in the dewatering tank; and the execution unit is configured to select to execute the correction process rather than selecting to execute the restarting process in the following situation: the restarting process has been executed for a specified number, and the dewatering tank is caused to stop rotating by the stopping unit
- In addition, the dewatering machine according to the present disclosure further includes an acceleration unit, and the acceleration unit causes the electric motor to accelerate in three stages including a first acceleration stage, a second acceleration stage and a third acceleration stage. The first acceleration stage refers to an acceleration stage, in which the motor accelerates toward the target rotating speed from starting rotating until the rotating speed of the motor reaches a first rotating speed, the first rotating speed is higher than a rotating speed at which the dewatering tank resonates transversely and lower than a rotating speed at which the dewatering tank resonates longitudinally. The second acceleration stage is an acceleration stage, in which the rotating speed of the motor increases from the first rotating speed to a second rotating speed higher than the first rotating speed. The third acceleration stage is an acceleration stage, in which the rotating speed of the motor increases from the second rotating speed to the target rotating speed. The first threshold is independently set in the first acceleration stage, the second acceleration stage and the third acceleration stage respectively, and the information value acquisition unit is configured to acquire the information value in the first acceleration stage, the second acceleration stage and the third acceleration stage respectively, the counting unit causes the count value to be added by 1 and calculates the accumulated value, and the determination unit determines that the washings are biased in the dewatering tank when the accumulated value reaches the first threshold.
- In addition, the dewatering machine according to the present disclosure further includes a duty ratio acquisition unit, configured to acquire a duty ratio of voltage applied to the motor at each specified time in the third acceleration stage; and a transformation unit, configured to transform the duty ratio acquired by the duty ratio acquisition unit into a specified index value. When the index value reaches a second threshold for a corresponding time, the determination unit determines that the washings are biased in the dewatering tank.
- In addition, the dewatering machine according to the present disclosure further includes a threshold modification unit, configured to modify the second threshold according to the accumulated value in at least one acceleration stage of the first acceleration stage, the second acceleration stage and the third acceleration stage.
- In addition, in the present disclosure, when a variation of the accumulated value reaches a third threshold, the determination unit determines that the washings are biased in the dewatering tank.
- In addition, the present disclosure provides a dewatering machine, including: a dewatering tank, formed in a cylindrical shape with a central axis extending in a direction inclined relative to an up-down direction, the dewatering tank is configured to contain washings, and rotate around the central axis so as to dewater the washings; an outer tank, configured to contain the dewatering tank; an electric motor, configured to cause the dewatering tank to rotate; a determination unit, configured to determine that the washings are biased in the dewatering tank when an information value, relevant to a rotation state of the electric motor before a rotating speed of the electric motor reaches a target rotating speed used for formally dewatering the washings, reaches a threshold; a detection unit, configured to mechanically detect eccentric rotation of the dewatering tank by contacting the outer tank when the dewatering tank eccentrically rotates along with biasing of the washings in the dewatering tank and the outer tank is caused to vibrate; a stopping unit, configured to cause the dewatering tank to stop rotating in one of the following situations: it is determined by the determination unit that the washings are biased; the eccentric rotation of the dewatering tank is detected by the detection unit; and a threshold correction unit, configured to correct the threshold in one of the following situations: a difference between the information value and the threshold is above the specified value when the eccentric rotation of the dewatering tank is detected by the detection unit; it is determined by the determination unit that the washings are biased before the eccentric rotation is detected by the detection unit.
- In addition, the present disclosure provides a dewatering machine, including: a dewatering tank, formed in a cylindrical shape with a central axis extending in a direction inclined relative to an up-down direction, the dewatering tank is configured to contain washings, and rotate around the central axis so as to dewater the washings; an outer tank, configured to contain the dewatering tank; an electric motor, configured to cause the dewatering tank to rotate; a determination unit, configured to determine that the washings are biased in the dewatering tank when an information value, relevant to a rotation state of the electric motor before a rotating speed of the electric motor reaches a target rotating speed used for formally dewatering the washings, reaches a threshold; a detection unit, configured to mechanically detect eccentric rotation of the dewatering tank by contacting the outer tank when the dewatering tank eccentrically rotates along with biasing of the washings in the dewatering tank and the outer tank is caused to vibrate; a stopping unit, configured to cause the dewatering tank to stop rotating in one of the following situations: it is determined by the determination unit that the washings are biased; the eccentric rotation of the dewatering tank is detected by the detection unit; and a suspending unit, configured to suspend an operation performed by the stopping unit for stopping the rotation of the dewatering tank, until a detection number of the detection unit reaches a specified number before it is determined by the determination unit that the washings are biased.
- According to the present disclosure, since the dewatering tank of the dewatering machine has a cylindrical shape with a central axis extending along a direction inclined relative to an up-down direction, the dewatering tank is arranged obliquely. A hollow annular balancing ring is coaxially arranged on the dewatering tank. Thus, in a static state of the dewatering tank, liquid contained in the balancing ring is biased downwards in the balancing ring.
- In the dewatering tank, washings are assumed to be biased in a rotating direction of the dewatering tank in a same position as the liquid biased downwards in the balancing ring. In the state, when rotation of the dewatering tank is started to dewater the washings, the dewatering tank eccentrically rotates from the beginning of the rotation.
- Therefore, in the dewatering machine, in a dewatering preparation stage, a dewatering preparation unit causes the dewatering tank to rotate at a very low speed lower than a maximum rotating speed at which the dewatering tank resonates, so as to detect a biased position of the washings in the dewatering tank in a rotating direction. The dewatering preparation unit causes the dewatering tank to stop rotating according to the detected biased position immediately before the washings biased in the dewatering tank will be positioned at an opposite side of the liquid biased downwards in the balancing ring, relative to the central axis.
- In addition, since the dewatering tank stops rotating when the washings biased in the dewatering tank are positioned at the opposite side of the liquid in the balancing ring relative to the central axis, the washings finally may come to a same side of the liquid in the balancing ring due to no time to stop and inertial rotation of the dewatering tank after stopping.
- Therefore, if the dewatering tank stops rotating immediately before the washings biased in the dewatering tank will be positioned at the opposite side of the liquid in the balancing ring relative to the central axis, the washings biased in the dewatering tank and the liquid biased downwards in the balancing ring can be maintained in a state of being positioned on approximately opposite sides relative the central axis. After such preparation stage, when the dewatering tank rotates to dewater, the dewatering tank rotates in a state that the liquid in the balancing ring and the washings are approximately balanced. Thus, eccentric rotation of the dewatering tank obliquely arranged can be early inhibited.
- According to the present disclosure, the dewatering tank of the dewatering machine has a cylindrical shape having the central axis which extends along the direction inclined relative to the up-down direction, and is arranged obliquely. In the dewatering machine which uses a motor to rotate the dewatering tank, in a state that the motor is accelerated to a target rotating speed for formally dewatering the washings, information values which are decreased with the increase of the rotating speed of the motor are acquired successively. When the information values are obtained each time, a count value with an initial value of zero is added by 1.
- If the washings in the dewatering tank are biased, an information value at a certain time becomes larger than a previous information value sometimes since an information value which shall be decreased is changed. In this case, an accumulated value of a difference between the information value and the previous information value is larger than zero. If the dewatering tank continues to rotate in a state that the washings in the dewatering tank are biased, the accumulated value becomes larger.
- Moreover, when the accumulated value when the count value is the specified value reaches a first threshold when the count value is the specified value, it is determined that the washings are biased in the dewatering tank, and the dewatering tank stops rotating. Thus, under a condition that the washings are biased in the obliquely arranged dewatering tank, eccentric rotation of the dewatering tank may be inhibited early in an acceleration state of the motor.
- According to the present disclosure, since an information value used in calculation of the accumulated value is corrected through moving average before calculation of the accumulated value, the information value is a high accuracy value of eliminating an error. Thus, the accumulated value with high accuracy is calculated according to the corrected information value, and whether the washings are biased is detected through the accumulated value with high accuracy, so that eccentric rotation of the dewatering tank may be inhibited early.
- According to the present disclosure, under a condition that the washings are biased in the dewatering tank and the dewatering tank stops rotating, the restarting process or the correction process is executed. The restarting process is a process for restarting to dewater the washing by enabling the dewatering tank to rotate again, and the correction process is a process for correcting washing biasing in the dewatering tank.
- Dewatering is started again through the restarting process under a condition that washing biasing is small to an extent without generating eccentric rotation of the dewatering tank, so that time used by the whole dewatering process may be shortened as much as possible. Under a condition that washing biasing is large to an extent that eccentric rotation of the dewatering tank is still generated, washing biasing may be reliably corrected through the correction process.
- Under a condition that the restarting process is executed for the specified number and the dewatering tank stops rotating, washing biasing is large to an extent needing to be corrected. In this case, the correction process is quickly executed without spending time on carrying out the restarting process repeatedly and stopping rotation of the dewatering tank, so that biasing may be reliably corrected. Thus, eccentric rotation of the dewatering tank may be inhibited early.
- According to the present disclosure, in the first acceleration stage, the second acceleration stage and the third acceleration stage of the motor from starting rotation to reaching the target rotating speed, the accumulated values are respectively calculated, and when the accumulated values reach the corresponding first thresholds in the first acceleration stage, the second acceleration stage and the third acceleration stage respectively, washing biasing in the dewatering tank may be determined, so that the dewatering tank stops rotating. Namely, since the biasing of the washings is detected in the first acceleration stage after the motor starts to rotate, eccentric rotation of the dewatering tank may be inhibited early. Furthermore, since the biasing of the washings is detected in three stages according to a sequence of the first acceleration stage, the second acceleration stage and the third acceleration stage, the condition of washing biasing may be reliably detected, and eccentric rotation of the dewatering tank is inhibited as early as possible.
- According to the present disclosure, in the third acceleration stage, when the duty ratio acquired at each specified moment is transformed into a specified index value, and the index value reaches a second threshold at a corresponding moment, it is determined that the washings are biased in the dewatering tank. That is, in the third acceleration stage, since the condition whether the washing is biased in the dewatering tank is double detected by adopting a mode of the information values and the first thresholds and adopting a mode of the duty ratio and the second thresholds, eccentric rotation of the dewatering tank may be reliably inhibited early.
- According to the present disclosure, since the second threshold is properly changed according to the accumulated value in at least one acceleration stage of the first acceleration stage, the second acceleration stage and the third acceleration stage, whether the washings are biased may be detected with high accuracy through the second threshold changed with combination of a situation of the dewatering tank, and eccentric rotation of the dewatering tank is inhibited early.
- According to the present disclosure, whether the washings are biased may be double detected through a mode whether the accumulated value reaches the first threshold and whether a variation of the accumulated value reaches the third threshold. In this case, whether the dewatering tank is in a state of large amplitude vibration, eccentric rotation of the dewatering tank may be reliably inhibited early according to the variation of the accumulated value though the accumulated value may be small without reaching the first threshold.
- According to the present disclosure, the dewatering tank of the dewatering machine is in a cylindrical shape with a central axis extending in the direction inclined relative to the up-down direction and is obliquely arranged. Whether the washings are biased in the dewatering tank is double detected through an electric mode based on a relationship between the information value relative to the rotation state of the motor and the threshold and a mechanical mode based on contact between the detection unit and the outer tank.
- In the dewatering machine in the shipment stage, due to an inclined difference of the dewatering tanks among individual dewatering machines, some dewatering machines may have a condition that the threshold is not correct. Thus, the threshold is corrected under the following situation: a difference between the information value when the detection unit detects eccentric rotation of the dewatering tank and a threshold is above the specified value, or the determination unit determines that the washings are biased before eccentric rotation is detected by the detection unit. Thus, in the dewatering process after the threshold is corrected, in the electric mode, whether the washings are biased is detected with high accuracy through the corrected threshold, so that eccentric rotation of the dewatering tank is inhibited early.
- According to the present disclosure, the dewatering tank of the dewatering machine is in the cylindrical shape with the central axis extending in the direction inclined relative to up-down direction and is obliquely arranged. Whether the washings are biased in the dewatering tank is double detected through the electric mode based on a relationship between the information value relative to the rotation state of the motor and the threshold and a mechanical mode based on contact between the detection unit and the outer tank.
- It is assumed that vibration of the dewatering tank is not too large, but due to the moving mode of the outer tank, the detection unit easily contacts the outer tank to generate error detection in the mechanical mode to cause the dewatering tank to stop rotating. Thus, until the detection number of the detection unit reach the specified number before the determination unit determines that the washings are biased, rotation stopping of the dewatering tank is suspended. Thus, not only the dewatering tank is prevented from stopping rotating due to error detection of the mechanical mode, but also eccentric rotation of the dewatering tank may be inhibited early.
-
-
FIG. 1 is a schematic longitudinal sectional right side view illustrating a dewatering machine according to an embodiment of the present disclosure. -
FIG. 2 is a block diagram illustrating an electric structure of a dewatering machine. -
FIG. 3 is a sequence diagram illustrating a state of an output signal of a Hall IC forming a rotating speed reading apparatus for reading a rotating speed of a motor. -
FIG. 4 is a sequence diagram illustrating a state of a rotating speed of a motor in a dewatering operation process implemented in a dewatering machine. -
FIG. 5 is a schematic diagram illustrating an interior of a dewatering tank. -
FIG. 6 is a sequence diagram illustrating a state of a rotating speed of a motor at a preparation stage of dewatering operation. -
FIG. 7 is a flow chart illustrating a control action at the preparation stage of dewatering operation. -
FIG. 8 is a flow chart illustrating a control action in a first acceleration stage of a motor in a dewatering operation process. -
FIG. 9A is a flow chart illustrating a control action related todetection 1 todetection 3 for detecting washings biasing in the dewatering tank in a first acceleration stage to a third acceleration stage of a motor. -
FIG. 9B is a flow chart illustrating a control action related todetection 1 todetection 3. -
FIG. 10 is a diagram illustrating a relationship between a count value n and a moving average value Cn in combination withdetection 1 todetection 3. -
FIG. 11 is a diagram illustrating a relationship between a count value n and an accumulated value G in combination withdetection 1 todetection 3. -
FIG. 12 is a flow chart illustrating a control action when a detection result is no good (NG). -
FIG. 13 is a flow chart illustrating a control action in the second acceleration stage of the motor. -
FIG. 14 is a flow chart illustrating a control action in the third acceleration stage of a motor. -
FIG. 15 is a flow chart illustrating schemas of the detection 4-1 and the detection 4-2 for detecting whether there is washings biasing in the dewatering tank in the third acceleration stage. -
FIG. 16 is a flow chart illustrating a control action of the detection 4-1. -
FIG. 17 is a diagram illustrating a relationship between the rotating speed and a moving accumulated value Cm in combination with detection 4-1 and detection 4-2. -
FIG. 18 is a flow chart illustrating a control action of the detection 4-2. -
FIG. 19 is a flow chart illustrating a first modification of a control action of thedetection 3 in the third acceleration stage. -
FIG. 20 is a schematic diagram illustrating an interior of the dewatering tank in the dewatering operation process. -
FIG. 21 is a flow chart illustrating a second modification of a control action ofdetection 3 in the third acceleration stage. -
FIG. 22 is a flow chart illustrating a control action of a third modification in the dewatering operation process. -
FIG. 23 is a flow chart illustrating a control action of the third modification. -
FIG. 24 is a flow chart illustrating a control action of a fourth modification. -
FIG. 25 is a flow chart illustrating a control action of a fifth modification. -
- 1: dewatering machine; 3: outer tank; 4: dewatering tank; 6: motor; 17: central axis; 19: balancing ring; 30: control part; 34: counter; 36: safety switch; Cm: moving accumulated value; Cn: moving average value; dm: duty ratio; Dn: difference; G: accumulated value; K: inclined direction; n: count value; Q: washings; Z: up-down direction; Z2: lower side.
- Embodiments of the present disclosure are described in detail by referring to the drawings below.
-
FIG. 1 is a schematic longitudinal sectional right side view illustrating adewatering machine 1 according to an embodiment of the present disclosure. An up-down direction inFIG. 1 is referred to as an up-down direction Z of thedewatering machine 1, and a left-right direction inFIG. 1 is referred to as a front-rear direction Y of thedewatering machine 1. Firstly, description is made to summary of thedewatering machine 1. In the up-down direction Z, an upper side is referred to as an upper side Z1, and a lower side is referred to as a lower side Z2. In the front-rear direction Y, a left side inFIG. 1 is referred to as a front side Y1, and a right side inFIG. 1 is referred to as a rear side Y2. - The
dewatering machine 1 includes all apparatuses capable of carrying out a dewatering operation of washings Q. That is, thedewatering machine 1 not only includes an apparatus with a dewatering function, but also includes a washing machine with a dewatering function and a washing and drying machine. Description is made in regard to thedewatering machine 1 by taking the washing machine as an example below. - The
dewatering machine 1 includes: ahousing 2, anouter tank 3, adewatering tank 4, a rotary wing 5, an electric motor 6, and a transmission mechanism 7. - The
housing 2 is made of, such as, metal, and formed in a box shape. Anupper surface 2A of thehousing 2 is formed to be inclined relative to a horizontal direction (HD) in a manner of extending to the upper side Z1 toward the rear side Y2. An opening 8 to enable the inside and outside of thehousing 2 to be communicated is formed in theupper surface 2A. A door 9 for opening and closing the opening 8 is arranged on theupper surface 2A. Anoperation part 10 consisting of a LCD operation panel and the like is arranged in an area closer the front side Y1 than the opening 8 on theupper surface 2A. A user could select a dewatering condition freely, or make indications, such as an indication of starting to run, an indication of stopping running, to thedewatering machine 1, by operating theoperation part 10. - The
outer tank 3 is made of, such as, resin, and formed in a cylindrical shape having a bottom. Theouter tank 3 has: acircumferential wall 3A, which is roughly cylindrical and configured along an inclined direction K inclined toward the front side Y1 relative to the up-down direction Z; a bottom wall 3B, configured to block a hollow part of thecircumferential wall 3A from the lower side Z2; and an annular wall 3C, which is annular and protrudes towards a circle center side of thecircumferential wall 3A while covering an edge at a side of the upper side Z1 of thecircumferential wall 3A. The inclined direction K presents inclination not only relative to the up-down direction Z, but also relative to the horizontal direction (HD). Anentrance 11 communicated with the hollow part of thecircumferential wall 3A from the upper side Z1 is formed inside the annular wall 3C. Theentrance 11 is opposite to the opening 8 of thehousing 2 from the lower side Z2, and theentrance 11 and the opening 8 are in a communicated state. Adoor 12 for opening and closing theentrance 11 is arranged on the annual wall 3C. The bottom wall 3B is formed in a circulate plate shape which is orthogonal to the inclined direction K and obliquely extends relative to the horizontal direction (HD). A through hole 3D penetrating through the bottom wall 3B is formed in a circle center of the bottom wall 3B. - Water can be stored in the
outer tank 3. Awater feeding pipeline 13 connected with a faucet of tap water is connected with theouter tank 3 from the upper side Z1, so that the tap water is fed to theouter tank 3 through thewater feeding pipeline 13. A feedingvalve 14 which can be opened and closed to start or stop water feeding is arranged in a midway of thewater feeding pipeline 13. Adrainage pipeline 15 is connected with theouter tank 3 from the lower side Z2, and the water in theouter tank 3 is discharged outside the machine from thedrainage pipeline 15. Adrainage valve 16 which can be opened and closed to start or stop drainage is arranged in a midway of thedrainage pipeline 15. - The
dewatering tank 4 is made of, such as, metal, and has acentral axis 17 extending along the inclined direction K. Thedewatering tank 4 is formed in a cylindrical shape having a bottom smaller than that of theouter tank 3, and can accommodate the washings Q internally. Thedewatering tank 4 has a roughly cylindricalcircumferential wall 4A arranged along the inclined direction K and a bottom wall 4B for blocking a hollow part of thecircumferential wall 4A from the lower side Z2. - An internal circumferential surface of the
circumferential wall 4A is an internal circumferential surface of thedewatering tank 4. An upper end of the internal circumferential surface of thecircumferential wall 4A is anentrance 18 for enabling the hollow part of thecircumferential wall 4A to expose to the upper side Z1. Theentrance 18 is opposite to theentrance 11 of theouter tank 3 from the lower side Z2, and theentrance 18 and theentrance 11 are in a communicated state. Theentrances door 12 together. A user of thedewatering machine 1 takes the washings Q in and out of thedewatering tank 4 through the opened opening 8 and theentrances - The
dewatering tank 4 is coaxially accommodated in theouter tank 3, and is obliquely arranged relative to the up-down direction Z and the horizontal direction HD. Thedewatering tank 4 accommodated in theouter tank 3 can rotate around thecentral axis 17. A plurality of through holes which are not shown are formed in thecircumferential wall 4A and the bottom wall 4B of thedewatering tank 4, and the water in theouter tank 3 can flow between theouter tank 3 and thedewatering tank 4 through the through holes. Therefore, a water level in theouter tank 3 is consistent with a water level in thedewatering tank 4. - A balancing
ring 19 formed in a hollow annular shape is coaxially arranged at the upper end of thecircumferential wall 4A, and is used for reducing vibration of thedewatering tank 4 when thedewatering tank 4 rotates so as to obtain rotational balance of thedewatering tank 4. Liquids for obtaining the rotational balance of thedewatering tank 4, such as saline water, are accommodated in an annular cavity 19A in the balancingring 19 in a free flow manner. - The bottom wall 4B of the
dewatering tank 4 is formed in a circulate plate shape extending with the bottom wall 3B of theouter tank 3 in parallel roughly across the gap in the upper side Z1, and a through hole 4C penetrating through the bottom wall 4B is formed at a circle center of the bottom wall 4B consistent with thecentral axis 17. A tubular supportingshaft 20 surrounding the through hole 4C and protruding to the lower side Z2 along thecentral axis 17 is arranged on the bottom wall 4B. The supportingshaft 20 is inserted into the through hole 3D on the bottom wall 3B of theouter tank 3, and a lower end of the supportingshaft 20 is located in the lower side Z2 of the bottom wall 3B. - The rotary wing 5, i.e. so-called impeller, is formed in a discoid shape by taking the
central axis 17 as a circle center, and is concentrically arranged with thedewatering tank 4 along the bottom wall 4B in thedewatering tank 4. A plurality of blades 5A radially configured are arranged on an upper surface of the rotary ring 5 facing theentrance 18 of thedewatering tank 4 from the lower side Z2. A rotatingshaft 21 extending toward the lower side Z2 from a circle center of the rotary wing 5 along thecentral axis 17 is arranged on the rotary wing 5. The rotatingshaft 21 is inserted into a hollow part of the supportingshaft 20, and a lower end of therotating shaft 21 is located in the lower side Z2 of the bottom wall 3B of theouter tank 3. - In the present embodiment, the motor 6 is realized through a variable frequency motor. The motor 6 is arranged in the lower side Z2 of the
outer tank 3 in thehousing 2, and is provided with anoutput shaft 22 rotating by centering thecentral axis 17. The transmission mechanism 7 is located between the lower ends of both the supportingshaft 20 and therotating shaft 21, and an upper end of theoutput shaft 22. The transmission mechanism 7 selectively transmits a driving force outputted by the motor 6 from theoutput shaft 22 to one or both of the supportingshaft 20 and therotating shaft 21. A widely known transmission mechanism can be taken as the transmission mechanism 7. - The
dewatering tank 4 and the rotary wing 5 rotates around thecentral axis 17 when the driving force from the motor 6 is transmitted to the supportingshaft 20 and therotating shaft 21. The washings Q in thedewatering tank 4 are stirred through therotating dewatering tank 4 and the blades 5A of the rotary wing 5 during a washing operation and a rinsing operation. In addition, a centrifugal force acts on the washings Q in thedewatering tank 4 through high-speed integrated rotation of thedewatering tank 4 and the rotary wing 5 during a dewatering operation after the rinsing operation. Thus, the washings Q are dewatered. A rotation direction of thedewatering tank 4 and the rotary wing 5 is consistent with a circumferential direction X of thedewatering tank 4. -
FIG. 2 is a block diagram illustrating an electric structure of thedewatering machine 1. - By referring to
FIG. 2 , thedewatering machine 1 includes: acontrol part 30 served as a dewatering preparation unit, an information value acquisition unit, a counting unit, a calculation unit, a determination unit, a stopping unit, an information correction unit, an execution unit, an acceleration unit, a duty ratio acquisition unit, a conversion unit, a threshold changing unit, a threshold correction unit and a suspending unit. Thecontrol part 30 is configured as a microcomputer including: for example,CPU 31;memory 32 such as a ROM, a RAM; atimer 33; and as acounter 34 served as the counting unit, and thecontrol part 30 is internally placed in the housing 2 (referring toFIG. 1 ). - The
dewatering machine 1 further includes: awater level sensor 35, asafety switch 36 as a detection unit, and a rotatingspeed reading apparatus 37. Thewater level sensor 35, thesafety switch 36, the rotatingspeed reading apparatus 37, the motor 6, the transmission mechanism 7, the feedingvalve 14, thedrainage valve 16 and theoperation part 10 are electrically connected with thecontrol part 30 respectively. - The
control part 30 switches a transmission target of the driving force of the motor 6 to one or both of the supportingshaft 20 and therotating shaft 21 by controlling the transmission mechanism 7. Thecontrol part 30 controls opening and closing of the feedingvalve 14 and thedrainage valve 16. As mentioned above, when the user selects the dewatering condition and the like of the washings Q by operating the operatingpart 10, thecontrol part 30 receives the selection. - The
water level sensor 35 is a sensor for detecting the water level of theouter tank 3 and thedewatering tank 4, and a detection result of thewater level sensor 35 is inputted into thecontrol part 30 in real time. - The
safety switch 36 is a switch for detecting a vibration of the outer tank caused by an eccentric rotation of thedewatering tank 4 along with bias of the washings Q in thedewatering tank 4, and is arranged at a position away from theouter tank 3 by a specified interval along the horizontal direction HD in the housing 2 (referring toFIG. 1 ). When theouter tank 3 is caused to vibrate along the horizontal direction HD substantially due to the eccentric rotation of thedewatering tank 4 along with the bias of the washings Q in thedewatering tank 4, theouter tank 3 comes into contact with thesafety switch 36 in forward and transverse directions. Thus, thesafety switch 36 is changed into "on", so as to detect the vibration of theouter tank 3 mechanically, namely, the eccentric rotation of thedewatering tank 4. The detection result of thesafety switch 36 is inputted into thecontrol part 30 in real time. - The rotating
speed reading apparatus 37 is an apparatus for reading a rotating speed of the motor 6, and more specifically, is an apparatus for reading a rotating speed of theoutput shaft 22 of the motor 6, and consists of for example a plurality of Hall IC40. The rotating speed read by the rotatingspeed reading apparatus 37 is inputted into thecontrol part 30 in real time. Thecontrol part 30 controls a duty ratio of a voltage applied to the motor 6 according to the inputted rotating speed, so that the motor 6 rotates with a desired rotating speed. On the other hand, thecontrol part 30 applies a brake to the rotation of the motor 6 to stop the rotation of thedewatering tank 4 based on a fact that the eccentric rotation of thedewatering tank 4 is detected by thesafety switch 36. The braker herein can cause acontrol part 30 to control the duty ratio to stop the rotation of the motor 6 urgently, and also can cause thecontrol part 30 to start a brake device by additionally arranging the brake device (not shown), thereby stopping the rotation of the motor 6 urgently. - For example, the number of Hall IC40 is 3 in the present embodiment. The Hall IC40 are divided into a first Hall IC41, a second Hall IC42 and a third Hall IC43. Herein, the motor 6 has a rotor (not shown) integrally rotating with the
output shaft 22, and magnets in a N-pole and magnets in a S-pole are arranged alternately in rows in a rotation direction of the rotor on an external circumferential surface of the rotor. If a group consisting of adjacent magnets in the N-pole and magnets in the S-pole are called as a "NS group", a plurality of NS groups are arranged along the rotation direction side by side on the external circumferential surface of the rotor. The first Hall IC41, the second Hall IC42, and the third Hall IC43 are arranged along the rotation direction of the rotor at regular intervals side by side according to such sequence. As the rotor rotates, each NS group passes through each Hall IC40 along the rotation direction in sequence. When the NS group passes through, each Hall IC40 transmits a pulse P. The rotatingspeed reading apparatus 37 reads the rotating speed of the motor 6 through a size of an interval of the adjacent pulses P. -
FIG. 3 is a sequence diagram illustrating a state of an output signal of the Hall IC40 forming the rotatingspeed reading apparatus 37. In the sequence diagram ofFIG. 3 , a horizontal axis indicates an elapsed time, and a vertical axis indicates an "on" and "off' state of the output signal of each Hall IC. As shown inFIG. 3 , there exists a deviation between times that the first Hall IC41, the second Hall IC42 and the third Hall IC43 produce the pulse P. Therefore, when a certain NS group passes through each Hall IC40 in sequence, the first Hall IC41, the second Hall IC42 and the third Hall IC43 produce the pulses P respectively according to such sequence. - An "on" state indicating a state in which the pulse P is produced and an "off' state other than the "on" state are presented in a waveform of an output signal of each Hall IC40. "Interruption W" is defined as switching from the "off' state to the "on" state and switching from the "on" state to the "off' state. The interruption W has a time at which the pulse P is produced and a time at which the pulse P is disappeared twice in one pulse P. When the interruption W occurs, the object of such situation is to input from the rotating
speed reading apparatus 37 to thecontrol part 30 in real time. It shall be noted that, the times that therotor 1 of the motor 6 produces the interruption W during rotation are different due to number of poles of the motor 6. - As shown in
FIG. 3 , when there are three Hall IC40 like in the present embodiment, for example, in a period R of the first Hall IC41 from the time at which the pulse P1 disappears to a time at which the next pulse P2 is produced and then disappears, the three Hall IC40 produce six interruptions W in total. With respect to the entire threeHall IC 40, it is desired that an interval I from some interruption W to the next interruption W is always the same in a steady rotation state of the motor 6. - However, the interval I may also be disordered even if the motor 6 rotates steadily, due to an installation error of the NS group of the motor 6 and an installation error of each Hall IC40. It shall be noted that, generally, the interval I is slowly decreased when the motor 6 is in an acceleration state. The interval I can be a value which is the same as a time unit (such as second), and can also be a summing value of counts in each interval I when the counter 34 (referring to
FIG. 2 ) counts once according to a fixed period. - Then, description is made to the dewatering operation conducted in the
dewatering machine 1. -
FIG. 4 is a sequence diagram illustrating a state of a rotating speed of the motor 6 in the dewatering operation process. In the sequence diagram ofFIG. 4 , a horizontal axis indicates the elapsed time, and a vertical axis indicates a rotating speed of the motor 6 (unit: rpm). It shall be noted that, the rotating speed of thedewatering tank 4 is the same as that of the motor 6 during the dewatering operation. - By referring to
FIG. 4 , at the beginning of the dewatering operation, a preparation stage, i.e., a dewatering preparation interval, of the washings Q is provided. In the dewatering preparation interval, thecontrol part 30 adjusts a position relationship between the washings Q in thedewatering tank 4 and liquid in the balancingring 19. After the dewatering preparation interval, thecontrol part 30 starts the rotation of the motor 6, so as to dewater the washings Q. - Specifically, after the dewatering preparation interval, the
control part 30 causes the motor 6 to rotate steadily at 120rpm after the rotating speed of the motor 6 being increased from 0rpm to 120rpm, i.e. a first rotating speed. The first rotating speed is greater than a rotating speed (such as 50rpm∼60rpm) at which a transverse resonance occurred on thedewatering tank 4, and is smaller than a rotating speed (such as 200rpm∼220rpm) at which a longitudinal resonance occurred on thedewatering tank 4. After the motor 6 rotates at 120rpm steadily, thecontrol part 30 causes the motor 6 to rotate steadily at 240rpm after the rotating speed of the motor 6 being increased from 120rpm to 240rpm, i.e. a second rotating speed. The second rotating speed is slightly greater than the rotating speed at which the longitudinal resonance is occurred. Next, thecontrol part 30 causes the motor 6 to rotate steadily at 800rpm after the rotating speed of the motor 6 being increased from 240rpm to 800rpm, i.e. a target rotating speed. The washings Q in thedewatering tank 4 are formally dewatered through the steady rotation of the motor 6 at 800rpm. - In this way, the
control part 30 causes the motor 6 to accelerate through three stages i.e., a first acceleration stage of enabling the motor 6 to rotate to 120rpm from the beginning, a second acceleration stage of rotating from 120rpm to 240rpm, and a third acceleration stage of rotating from 240rpm to 800rpm, so as to reach a target 800rpm. Different from such situation, if the motor 6 is accelerated to 800rpm from 0rpm uninterruptedly, a drainage state of thedrainage pipeline 15 may be deteriorated since a lot of water leaks from the washings Q, or thedrainage pipeline 15 is jammed with foam. However, in the present embodiment, the motor 6 is accelerated stepwise so that a lot of water will not leak from the washings Q at one time. Therefore, such bad condition can be prevented. - When the washings Q in the
dewatering tank 4 are in a bias configuration state of being distributed on the circumferential direction X (referring toFIG. 1 ) of thedewatering tank 4 unevenly, the washings Q are biased in thedewatering tank 4. If the dewatering operation is carried out in such state, thedewatering tank 4 may be substantially shaken due to the eccentric rotation thereof, thereby applying great vibration to thedewatering machine 1, producing noise. - Therefore, the
control part 30 detects whether the washings Q in thedewatering tank 4 are biased during the dewatering operation, and stops the motor 6 when detecting that the washings Q are biased. Thecontrol part 30 performs four electric detections, i.e.detection 1,detection 2,detection 3 anddetection 4, in such detection mode. It shall be noted that, the mechanical detection of the safety switch 36 (referring toFIG. 1 ) is performed in the whole period of the dewatering operation. It shall be noted that, the term "detection" below refers to an action of inspecting, and the term "check" refers to an action of finding some result during the detection. -
Detection 1 is performed at the first acceleration stage.Detection 2 is performed at the second acceleration stage.Detection 3 anddetection 4 are performed at the third acceleration stage. Specifically,detection 1 todetection 3 are performed in the whole period of the corresponding acceleration stages in the first acceleration stage to the third acceleration stage, and relative to this,detection 4 is performed in a midway of the third acceleration stage. In this way, the motor 6 is accelerated in three stages in thedewatering machine 1, thereby monitoring a rotation state of thedewatering tank 4 through detections 1-4 while avoiding performing the dewatering slowly at the rotating speeds at which the transverse resonance and the longitudinal resonance occurred, namely, 120rpm and 240rpm. Description is made to the dewatering preparation stage and detections 1-4 in sequence below. - Firstly, description is made to the dewatering preparation stage.
FIG. 5 is a schematic diagram illustrating an interior of thedewatering tank 4.FIG. 5 shows an interior of thedewatering tank 4 viewed along a direction of thecentral axis 17 of thedewatering tank 4. A front position biasing toward the front side Y1 and a deep position biasing toward the rear side Y2 are presented in thedewatering tank 4. Since thecentral axis 17 is arranged obliquely towards the front side Y1 relative to the up-down direction Z, the front position is located at a position closer to the lower side Z1 than the deep position (referring toFIG. 1 ). Since the liquid accommodated in the balancingring 19 is free of the effect of the centrifugal force generated by the rotation of thedewatering tank 4 in a state that thedewatering tank 4 is static and that thedewatering tank 4 rotates at a very low speed, the liquid accommodated in the balancingring 19 is provided at the front position in the balancingring 19 due to a self-weight and biased towards the lower side Z2. - In the case that the washings Q are placed in the
dewatering tank 4 in a manner of being biased along the circumferential direction X, when thedewatering tank 4 starts to rotate, relative to thecentral axis 17, the washings Q are preferably located at the deep position at a side opposite to the liquid biased to the front position in the lower side Z2 in the balancingring 19. If the washings Q are in such state, the eccentric rotation of thedewatering tank 4 can be inhibited from the beginning of the rotation since thedewatering tank 4 starts to rotate in a state that the washings Q and the liquid in the balancingring 19 are roughly balanced. - In contrast, it is assumed that, in the
dewatering tank 4, the washings Q are biased in the circumferential direction X of thedewatering tank 4 at a position same as the position where the liquid in the balancingring 19 is biased towards the lower side Z2. In the state, when thedewatering tank 4 starts to rotate to dewater the washings Q, thedewatering tank 4 carries out the eccentric rotation when starting to rotate. -
FIG. 6 is a sequence diagram illustrating a state of the rotating speed of the motor 6 at the preparation stage of dewatering operation. In the sequence diagram ofFIG. 6 , a horizontal axis indicates the elapsed time, and a vertical axis indicates the rotating speed of the motor 6 (unit: rpm). Thedewatering tank 4 rotates steadily at a very low speed at the preparation stage. It shall be noted that, the rotating speed of the motor 6 at this time is lower than a minimum rotating speed when a resonance occurred on thedewatering tank 4. The minimum rotating speed is different due to different sizes of thedewatering tank 4, and is a rotating speed when the transverse resonance occurred on thedewatering tank 4 in the present embodiment, namely, 50rpm-60rpm described above. In this case, for example, the rotating speed of the motor 6 at the preparation stage is 10rpm-30rpm, preferably 20rpm. - If the
dewatering tank 4 rotates steadily at the very low speed when the washings Q are placed in thedewatering tank 4 in a manner of being biased in the circumferential direction X, the rotating speed of the motor 6 is changed like that shown inFIG. 6 . Specifically, the washings Q are moved toward the upper side Z1 when going to the deep position from the front position, which causes a burden to the motor 6. Therefore, the rotating speed of the motor 6 is reduced. On the contrary, the rotating speed of the motor 6 is increased due to the reduction of the previous burden when the washings Q are moved to the front position from the deep position. Therefore, it can be known that, the washings Q are located at the front position when the rotating speed of the motor 6 is maximum, and the washings Q are located at the deep position when the rotating speed of the motor 6 is minimum. In this way, since thedewatering tank 4 rotates at very low speed, a biased position of the washings Q in thedewatering tank 4 in the circumferential direction X can be detected according to the rotating speed of the motor 6. -
FIG. 7 is a flow chart illustrating a control action at the preparation stage of dewatering operation. - According to the above contents, the
control part 30 causes the motor 6 to start to rotate at very low speed at the dewatering preparation stage, so that thedewatering tank 4 rotates at very low speed (step S1). It shall be noted that, prior to the dewatering operation, if the water in theouter tank 3 and thedewatering tank 4 is discharged after the washings Q are rinsed, the motor 6 starts to rotate at the very speed in step S1 according to a current station that the discharging is finished. When the motor 6 rotates at the very low speed, thecontrol part 30 detects the biased position of the washings Q in thedewatering tank 4 in real time according to an output result from the rotating speed reading apparatus 37 (step S2). Next, thecontrol part 30 brakes the motor to stop the rotation ofdewatering tank 4 immediately before the washings Q reach at the deep position according to the detected biased position (step S3). - If the rotation of the
dewatering tank 4 is stopped when the washings Q biased in thedewatering tank 4 are located at a side opposite to the liquid in the balancingring 19 relative to thecentral axis 17, the washings Q will finally arrive at a side same as that of the liquid in the balancingring 19 because the rotation might not be stopped timely or thedewatering tank 4 might rotate again due to inertia when the brake is relieved after thedewatering tank 4 is stopped. - In view of this, the
control part 30 causes thedewatering tank 4 to stop rotating immediately before the washings Q biased in thedewatering tank 4 is located at a side opposite to, relative to thecentral axis 17, the liquid biased towards the lower side Z2 in the balancingring 19. Therefore, after thedewatering tank 4 is stopped, the washings Q biased in thedewatering tank 4 and the liquid biased towards the lower side Z2 in the balancingring 19 are maintained at a state of being located at roughly opposite sides relative to thecentral axis 17. In addition, since thedewatering tank 4 is supported through a one-way bearing in a unidirectional rotation manner, the stoppeddewatering tank 4 does not reverse, and is in a static state. After such preparation stage, when thedewatering tank 4 rotates to dewater, thedewatering tank 4 rotates in a state that the liquid in the balancingring 19 and the washings Q are roughly balanced. Thus, the eccentric rotation of the biaseddewatering tank 4 can be inhibited early. - Next, description is made to the first acceleration stage after subjecting to the dewatering preparation interval. It shall be noted that, since the liquid in the balancing
ring 19 is not biased toward the lower side Z2 due to an effect of the centrifugal force after the first acceleration stage, the liquid substantively does not cause the eccentric rotation of thedewatering tank 4. -
FIG. 8 is a flow chart illustrating a control action in the first acceleration stage. By referring toFIG. 8 , after the dewatering preparation interval, thecontrol part 30 causes the motor 6 to accelerate to reach a target rotating speed (i.e.,120rpm) so as to start the dewatering operation (step S11). Once the above interruption W is inputted ("yes" in step S12), thecontrol part 30 enables a count value n with an initial value "zero" to add by 1 (+1) (step S13). Then, thecontrol part 30starts detection 1 in the first acceleration stage (step S14). Whendetection 1 is "OK" ("yes" in step S15), that is, under a condition that thecontrol part 30 determines that the washings Q are not biased, thecontrol part 30 resets the count value n to zero (step S17) ifdetection 1 is ended ("yes" in step S16). Then, when the rotating speed of the motor 6 reaches 120rpm ("yes" in step S18), thecontrol part 30 causes the motor 6 to rotate steadily at 120rpm (step S19). -
FIG. 9A andFIG. 9B are flow charts illustrating a controlaction regarding detection 1. By referring toFIG. 9A , thecontrol part 30starts detection 1 in the above step S14, and once the interruption W is inputted ("yes" in step S21), a timing value An is obtained (step S22). The timing value An is referred to as An below. An is the interval I between the inputted interruption W and the previous interruption W (referring toFIG. 3 ) and is a positive value measured by thetimer 33. Under a condition that there does not exist a previous interruption W, the interval I from a start time ofdetection 1 to the initial interruption W is An. It shall be noted that, when the interruption W is inputted, since the count value n is added by 1 (step S13) while An is obtained, a suffix "n" in the An is consistent with the count value n added by 1. Therefore, for example, when the initial interruption W is inputted, the count value n becomes 1, and An becomes A1. When a next interruption W is inputted, the count value n becomes 2, and An becomes A2. - Next, the
control part 30 calculates a moving average value Bn of An (step S23). Hereinafter, the moving average value Bn is sometimes referred to as Bn. Bn is a value obtained by dividing a summing value of An and previous An-1∼An-5 by 6. Herein, 6 is divided so as to be in combination with the situation that there exists six interruptions W during the period R from the time that the pulse P disappears to the time that the next pulse P is produced and then disappears (referring toFIG. 3 ). - Next, the
control part 30 calculates a moving average value Cn of Bn (step S24). Hereinafter, the moving average value Cn is sometimes referred to as Cn. Cn is a value obtained by dividing a summing value of Bn and previous Bn-1∼Bn-5 by 6. - In an acceleration state of the motor 6 for accelerating to the target rotating speed, the
control part 30 enables the count value n to be added by 1 in step S13 (referring toFIG. 8 ) once the interruption W is inputted, and obtains Cn successively in step S24. Therefore, in fact, the operation for adding the count value n by 1 and the operation for obtaining Cn are conducted simultaneously. That is, thecontrol part 30 enables the count value n to be added by 1 every time Cn is obtained. - According to experiences, the obtained An∼Cn are not stable until the count value n reaches a specified starting value ("no" in step S25), and the count value n is inapplicable to
detection 1. The starting value refers to, such as, 75, in the present embodiment. When the count value n reaches the starting value ("yes" in step S25), thecontrol part 30 calculates a difference Dn obtained by subtracting the previous Cn-1 from Cn (step S26). Then, thecontrol part 30 calculates a moving average value En of the difference Dn (step S27). The moving average value En is a value obtained by dividing a summing value of the difference Dn and previous differences Dn-1∼Dn-5 by 6. Hereinafter, the difference Dn is referred to as Dn, and the moving average value En is referred to as En. - With respect to respective meanings of Dn and En, description is made by taking C11 (= (B6+B7+B8+B9+B10+B11)/6) and C17 (= (B12+B13+B14+B15+B16+B17)/6) as an example. E17, the count value n of which is consistent with that of C17, is a value obtained by dividing D12∼D17 by 6. E17 may be expressed with Cn as shown in the following formula (1), and may be expressed with Bn as shown in the following formula (2).


- As mentioned above, with respect to the total three Hall IC40, there exists six interruptions W during the period R of one Hall IC40 from the time at which a pulse P disappears to the time at which the next pulse P is produced and then disappears (referring to
FIG. 3 ). The installation error of the Hall IC40 can be eliminated through Bn. Moreover, according to Formula (2), En is equivalent to a difference of a summing value of Bn∼Bn+5 related to six interruptions W produced when a certain NS group passes one Hall IC40 and a summing value of Bn+6∼Bn+11 related to six interruptions W produced when a next NS group passes the Hall IC40. An error due to a relevant position of the adjacent NS groups can be roughly eliminated through En calculated with multiple Bn. -
FIG. 10 is a diagram illustrating a relationship between a count value n and Cn, where a horizontal axis indicates the count value n, and a vertical axis indicates Cn. By referring toFIG. 10 , although An decreases with a rotating speed increase caused by the acceleration of the motor 6, the change of An is disordered due to the installation error of the NS group and the installation error of each Hall IC40. The actual An increases and decreases as shown by the dotted line. Bn is obtained through the moving average in S23 with the installation error of each Hall IC40 being eliminated, and Cn is obtained through the moving average in S24 with the noise of Bn being eliminated. Then, Dn is obtained through Cn, and En is obtained through Dn. An, Bn, Cn, Dn and En are relevant information values regarding the rotation state of the motor 6. - In the case that the
dewatering tank 4 does not rotate eccentrically because the washings Q are not biased, Cn should decrease with the increase of the rotating speed of the motor 6 (referring to an arrow in a dot and dash line), as shown by a solid line inFIG. 10 . In addition, since the moving average value of An is Bn and the moving average value of Bn is Cn, An and Bn should also decreas with the increase of the rotating speed of the motor 6 although both of An and Bn have noise respectively. - In the case that the
dewatering tank 4 does not rotate eccentrically, since Cn always decreases in the acceleration process of the motor 6, the difference Dn obtained by subtracting the previous Cn-1 from Cn becomes not greater than zero, and the moving average value En of Dn also becomes not greater than zero. By referring toFIG. 9B , if En is not greater than zero ("yes" in step S28), thecontrol part 30 enables a variable Fn to be zero (step S29). On the other hand, in the case that thedewatering tank 4 rotates eccentrically because the washings Q in thedewatering tank 4 are biased, Cn which should decrease may be changed and increase with the increase of the rotating speed of the motor 6. In this case, Dn and En at a time, at which Cn increased, become greater than zero ("no" in step S28), and thecontrol part 30 sets the variable Fn as En per se (step S30). - The
control part 30 calculates an accumulated value G (=F1+F2+...) of Fn once Fn is obtained (step S31). The accumulated value G is also an accumulated value of the moving average value En of the difference Dn between Cn and Cn-1 in the case that Cn is greater than the previous Cn-1. -
FIG. 11 is a diagram illustrating a relationship between the count value n and the accumulated value G, where a horizontal axis indicates the count value n, and a vertical axis indicates the accumulated value G. In the case that the motor 6 accelerates while thedewatering tank 4 eccentrically rotates continuously, the accumulated value G increases stepwise, as shown inFIG. 11 . With respect to the accumulated value G, first thresholds are determined according to each specified count value n. The first thresholds are correlated with the count value n and stored in the memory 32 (referring toFIG. 2 ). The first thresholds are positive values. - Returning to
FIG. 9B , when the accumulated value G for count value n with a specified value reaches a first threshold for count value n with the specified value ("yes" in step S32), thecontrol part 30 sets the detection result as NG, and determines that thedewatering tank 4 is largely eccentric and the washings Q are biased (step S33). - On the other hand, if the accumulated value G is less than the corresponding first threshold ("no" in step S32), the
control part 30 sets the detection result as OK, and determines that the washings Q are not biased (step S34). Then, thecontrol part 30 carries out steps S21∼S34 repeatedly, until the count value n becomes an end value indicating that the first acceleration stage is ended ("no" in step S35). The end value of the count value n in the present embodiment is, for example, 245. When the count value n becomes the end value ("yes" in step S35),detection 1 is ended by the control part 30 (step S36). The processes of steps S21∼S34 are equivalent to the process of the above step S15, and the processes of steps S35∼S36 are equivalent to the process of the above step S16 (referring toFIG. 8 ). -
FIG. 12 is a flow chart illustrating a control action in the case that the detection result is NG. By referring toFIG. 12 , thecontrol part 30 causes the motor 6 to stop rotating (step S41), i.e. causes thedewatering tank 4 to stop rotating, when the detection result is determined as NG. Thus, in the case that the washings Q in thedewatering tank 4 are biased, the eccentric rotation of thedewatering tank 4 can be inhibited early when the motor 6 is in the acceleration state. - Especially, prior to calculating the accumulated value G, the
control part 30 first corrects a calculation basis (i.e., An) of the accumulated value G through performing the moving average in step S23 and step S24 repeatedly. Therefore, Cn obtained as a correction result becomes a high precision value with the error being eliminated. Therefore, an accumulated value G with high precision is calculated according to Cn, the precision of which is improved through the correction, and the bias of the washings Q is detected with high precision through the accumulated value G, thus the eccentric rotation of thedewatering tank 4 can be inhibited early. - After the
dewatering tank 4 stops rotating, thecontrol part 30 determines whether the current state is a state before the dewatering operation is restarted (step S42). Restarting of the dewatering operation refers to a restarting process, through which thecontrol part 30 starts the dewatering operation again by enabling thedewatering tank 4 to rotate again immediately after thedewatering tank 4 is caused to stop rotating to suspend the dewatering operation. Sometimes, the restarting process may also be conducted even if the biasing of the washings Q is small. - Before the restarting of the restarting process is implemented ("yes" in step S42), the
control part 30 performs the restarting process (step S43). It shall be noted that, prior to the restarting process, a drainage can be first conducted in theouter tank 3. In the case that thedrainage pipeline 15 is jammed with foams, the foams can be discharged outside of thedrainage pipeline 15 through the drainage herein, and thus, the situation that thedrainage pipeline 15 is jammed with the foams can be eliminated. - If it is not a state before restarting ("no" in step S42), the
control part 30 performs a correction process (step S44). In the correction process, thecontrol part 30 closes thedrainage valve 16 and opens the feedingvalve 14 so as to feed water into thedewatering tank 4 to a specified water level, so that the washings Q in thedewatering tank 4 are immerged into water and are easy to loosen. In this state, thecontrol part 30 causes the washings Q attached to the internal circumferential surface of thedewatering tank 4 to peel off and stir by causing thedewatering tank 4 and the rotary wing 5 to rotate, thereby correcting the biasing of the washings Q in thedewatering tank 4. - In this way, the
control part 30 performs either the restarting process or the correction process alternatively in the case that thedewatering tank 4 has stopped rotating. If the biasing of the washings Q is small enough so that thedewatering tank 4 does not rotate eccentrically, the dewatering is started again through the restarting process. Therefore, a time required in the whole dewatering process can be shortened as far as possible. If the biasing of the washings Q is large enough so that thedewatering tank 4 rotates eccentrically again in the next dewatering process, the biasing of the washings Q can be reliably corrected through the correction process. - After performing the restarting process for a specified number (which is 1 herein) and enabling the
dewatering tank 4 to stop rotating ("no" in step S42), thecontrol part 30 selects to not perform the restarting process and selects to perform the correction process (step S44). That is, in the case that the restarting process has been performed for the specified number and thedewatering tank 4 has stopped rotating, the biasing of the washings Q is large and needs to be corrected. In this case, the correction process is quickly performed rather than spending time on the restarting process and stopping the rotation of thedewatering tank 4. Therefore, the biasing is corrected reliably. Therefore, the eccentric rotation of thedewatering tank 4 can be inhibited early. It shall be noted that, in the present embodiment, although the specified time is set as 1, it can also be set as more than 2. - Then, description is made to the second acceleration stage after the steady rotation at 120rpm.
FIG. 13 is a flow chart illustrating a control action in the third acceleration stage. By referring toFIG. 13 , thecontrol part 30 causes the motor 6 to accelerate to a target rotation speed of 240rpm at the second acceleration stage (step S51). Thecontrol part 30 enables the count value n to add by 1 (step S53) once the interruption W is inputted ("yes" in step S52). It shall be noted that, the count value n at the beginning of the second acceleration stage is zero. - Next, in the second acceleration stage, the
control part 30 starts detection 2 (step S54). In the case thatdetection 2 is OK ("yes" in step S55), that is, in the case that thecontrol part 30 determines that the washings Q are not biased in the second acceleration stage, thecontrol part 30 resets the count value n to zero (step S57) at the end of detection 2 ("yes" in step S56). Then, when the rotating speed of the motor 6 reaches 240rpm ("yes" in step S58), thecontrol part 30 causes the motor 6 to rotate steadily at 240rpm (step S59). - The content of
detection 2 is the same as that ofdetection 1. Therefore, the processes of above steps S21∼S34 are equivalent to the process of step S55, and the processes of step S35 and S36 are equivalent to the process of step S56 (referring toFIG. 9B ). The first threshold indetection 2 is set as to be different from that indetection 1. In addition, with respect todetection 2, since the rotating speed of the motor 6 is higher than that indetection 1, the starting value in step S25 (referring toFIG. 9A ) is accordingly less than the starting value indetection 1, which is, for example, 17 in the present embodiment. In the case that the detection result ofdetection 2 is NG ("no" in step S55), that is, in the case that thecontrol part 30 determines that the washings Q in thedewatering tank 4 are biased, thecontrol part 30 performs the processes of steps S41∼S44 as it did in detection 1 (referring toFIG. 12 ). - It shall be noted that, with respect to the dewatering operation under the restarting process after
detection 2, the duration of the steady rotation at 120rpm (referring toFIG. 4 ) can be shortened to be shorter than the duration of the steady rotation at 120rpm of the previous dewatering operation which is stopped. With respect to the restarting process, since the washings Q are attached to the internal circumferential surface of thedewatering tank 4 to a certain extent and in a state of roughly being dewatered, the duration of the steady rotation at 120rpm can be shortened. Thus, the time of the dewatering operation can be shortened. - Next, description is made to the third acceleration stage after the steady rotation at 240rpm.
FIG. 14 is a flow chart illustrating a control action in the third acceleration stage. By referring toFIG. 14 , thecontrol part 30 causes the motor 6 to accelerate to a target rotating speed 800rpm in the third acceleration stage (step S61). Thecontrol part 30 enables the count value n to be added by 1 (step S63) once the interruption W is inputted ("yes" in step S62). In addition, the count value n at the beginning of the third acceleration stage is zero. - In the third acceleration stage, the
control part 30 starts detection 3 (step S64). Next, in the case thatdetection 3 is OK ("yes" in step S65), that is, in the case that thecontrol part 30 determines that the washings Q are not biased, thecontrol part 30stops detection 3 when the rotating speed of the motor 6 reaches 800rpm ("yes" in step S66), and resets the count value n as zero, so that the motor 6 rotates steadily at 800rpm to continue to dewater (step S67). - The content of
detection 3 is substantively the same as those ofdetections FIG. 9A andFIG. 9B ). The first threshold indetection 3 is set as to be different from those ofdetections FIG. 9A ) indetection 3 is the same as that indetection 2. In the case that the detection result ofdetection 3 is NG ("no" in step S65), that is, in the case that thecontrol part 30 determines that the washings Q in thedewatering tank 4 are biased, thecontrol part 30 also performs the processes of steps S41∼S44 as it does indetections 1 and 2 (referring toFIG. 12 ). - It shall be noted that, with respect to dewatering operation under the restarting process after
detection 3, as described regardingdetection 2, the duration of the steady rotation at 120rpm may be shortened to be shorter than the duration of the steady rotation at 120rpm of the previous dewatering operation which is stopped. Moreover, the difference betweendetection 3 anddetections FIG. 9B ), the processes in step S21∼step S34 may also be repeated during the period that the rotating speed of the motor 6 reaches 800rpm. At the beginning of repeating such processes, respective values of n and An∼G are reset to zero. - As described above, in
detection 1 of the first acceleration stage,detection 2 of the second acceleration stage anddetection 3 of the third acceleration stage, thecontrol part 30 acquires information values of An∼En and the like respectively, enables the count value to be added by 1 so as to calculate the accumulated value G. When the accumulated value G reaches a corresponding first threshold, thecontrol part 30 determines that the washings Q are biased in thedewatering tank 4 and causes thedewatering tank 4 to stop rotating. That is, since the detection of the biasing of the washings Q begins in the first acceleration stage after the motor 6 starts to rotate, eccentric rotation of thedewatering tank 4 may be inhibited early. Moreover, since the detection of the biasing of the washings Q is carried out in three stages in a sequence of the first acceleration stage, the second acceleration stage, and the third acceleration stage, the biasing of the washings Q can be reliably detected, so that eccentric rotation of thedewatering tank 4 may be inhibited as early as possible. - In
detection 3, thecontrol part 30 executes detection in a first mode. As described above, In the detection in the first mode, the biasing of the washings Q in thedewatering tank 4 is detected according to whether the accumulated value G reaches the first threshold. Thecontrol part 30 may also execute a detection in a second mode rather than executing the detection in the first mode. In the detection in the second mode, the biasing of the washings Q is detected according to whether a variation of the accumulated value G reaches a third threshold. Different from the first threshold, the third threshold is preset and stored in the memory 32 (referring toFIG. 2 ). The third threshold is a positive value. Like in the third acceleration stage, when the rotating speed of the motor 6 rises to a certain extent, for example, 400rpm, an eccentric state of the washings Q in thedewatering tank 4 may be deteriorated because water of the washings Q is removed due to previous dewatering. As a result, the vibration of thedewatering tank 4 becomes larger. On the other hand, as the characteristics of the accumulated value G, although the accumulated value G sharply increases when the rotating speed of the motor 6 is low, the accumulated value G increases slowly as the rotating speed approaches the target rotating speed. - Thus, merely for the detection in the first mode, when the rotating speed rises to some extent, the accumulated value G may be lower than the first threshold no matter whether the vibration of the
dewatering tank 4 is large or small, so that thedewatering tank 4 fails to stop rotating. Accordingly, both of the detections in the first mode and the second mode may be executed. As for the detection in the second mode, when the variation of the accumulated value G, i.e., a variation degree of the accumulated value G, reaches the third threshold, thecontrol part 30 determines that the washings Q are biased and causes thedewatering tank 4 to stop rotating. Thus, the accumulated value G may always be small and fails to reach the first threshold no matter whether thedewatering tank 4 is in a state of large amplitude vibration, and with such situation, state variation of the washings Q during dewatering may also be sensitively reflected by focusing on the variation of the accumulated value G. Therefore, the eccentric rotation of thedewatering tank 4 can be reliably inhibited early. Certainly, the detection in the second mode not only can be executed indetection 3, but also can be executed indetection 1 anddetection 2. - Next, description is made to
detection 4 which is executed in parallel with thedetection 3 in the third acceleration stage.Detection 4 consists of detection 4-1 and detection 4-2. Detections 1-3 are detections for detecting the biasing of the washings Q by using interruption W related to the motor 6 in an acceleration state. Relative to this, detection 4-1 and detection 4-2 are detections for detecting the biasing of washings Q by using the duty ratio.FIG. 15 is a flow chart illustrating schemas of detection 4-1 and detection 4-2. - Referring to
FIG. 15 , as the third acceleration stage, thecontrol part 30 causes the motor 6 to accelerate from 240rpm to 800rpm in step S61 (referring toFIG. 14 ). - In a state that the motor 6 is accelerated, when the rotating speed of the motor 6 reaches 300rpm, the
control part 30 acquires a duty ratio of the voltage applied to the motor 6 at this moment as α value (step S71). The rotating speed 300rpm does not refer to a rotating speed in a state that water is stored in thedewatering tank 4, but refers to a rotating speed which is not influenced by eccentricity of thedewatering tank 4 most. Thus, the α value at 300rpm is the duty ratio in a state that it is not influenced by eccentricity of thedewatering tank 4 most, but only is influenced by a load of the washings Q. - Moreover, in a state that the motor 6 continues to accelerate, during a period in which the rotating speed rises from 600rmp to 729rpm, the
control part 30 implements detection 4-1 (step S72). Under a condition that detection 4-1 is not OK ("no" in step S72), that is, under a condition that thecontrol part 30 determines that the washings Q are biased, thecontrol part 30 executes the processes in step S41∼step S44 as it does in detections 1-3 (referring toFIG. 12 ). It shall be noted that, as described indetection 2 anddetection 3, with respect to the dewatering operation in the restarting process after detection 4-1, the duration of the steady rotation at 120rpm may be shortened to be shorter than the duration of the steady rotation at 120rpm of the previous dewatering operation which is stopped. - On the other hand, under a condition that detection 4-1 is OK ("yes" in step S72), that is, under a condition that the
control part 30 determines in detection 4-1 that the washings Q are not biased, thecontrol part 30 continues to implement detection 4-2 in a state that the motor 6 continues to accelerate from 730rpm (step S77). - Under a condition that detection 4-2 is OK ("yes" in step S77), that is, under a condition that the
control part 30 determines in detection 4-2 that the washings Q are not biased, thecontrol part 30 causes the motor 6 to stably rotate at 800rpm after accelerating the motor 6 to the target rotating speed of 800rpm, so as to cause the washings Q to be dewatered continuously (step S78). - On the other hand, under a condition that detection 4-2 is not OK ("no" in step S77), that is, under a condition that the
control part 30 determines that the washings Q are biased, thecontrol part 30 causes the motor 6 to stably rotate at a rotating speed less than 800rpm, so as to cause the washings Q to be dewatered continuously (step S79). - Next, detection 4-1 and detection 4-2 are described in detail respectively.
-
FIG. 16 is a flow chart illustrating a control action with respect to detection 4-1. Referring toFIG. 16 , in the state that the motor 6 continues to accelerate after step S71 (referring toFIG. 15 ), thecontrol part 30 starts to carry out detection 4-1 (step S80) as the rotating speed of the motor 6 reaches 600rpm. - Next, the
control part 30 starts to count through the counter 34 (step S81), and initializes thecounter 34 every 0.3s so as to count within 0.3s (step S82 and step S83). - The
control part 30 acquires the rotating speed of the motor 6 at the time of each counting and a duty ratio dm(m: a count value) of the voltage applied to the motor 6 at the time of counting (step S84). That is, thecontrol part 30 acquires the rotating speed and the duty ratio dm of the motor 6 at specified moment in the third acceleration stage in which the rotating speed of the motor 6 rises from 240rpm to 800rpm. The duty ratio dm is an information value related to the rotation state of the motor 6. - Moreover, in step S84, the
control part 30 calculates a correction value Bm according to the following formula (3), where Bm is obtained by correcting the duty ratio dm with the α value. It shall be noted that X and Y in the formula (3) are constants solved through experiments and the like. Different from simple ratio calculation, a weight is changed through the formula (3), so that the duty ratio dm is corrected, and detection 4-1 may be executed with good accuracy through the obtained correction value Bm.
- Moreover, in step S84, the
control part 30 calculates a moving accumulated value Cm (m: count value) of the correction value Bm. The moving accumulated value Cm is a value obtained by summing 5 consecutive correction values Bm in a counting sequence. Additionally, as for a certain moving accumulated value Cm and a moving accumulated value Cm-1 previous to Cm, the last 4 correction values Bm among the 5 correction values Bm for forming the moving accumulated value Cm-1 and thefront 4 correction values Bm among the 5 correction values Bm for forming the moving accumulated value Cm are same values respectively. It shall be noted that the number of the correction values Bm for forming the moving accumulated value Cm is not limited to 5. The moving accumulated value Cm is a specified index value transformed from the duty ratio dm by thecontrol part 30. - Next, the
control part 30 calculates a second threshold (step S85) related to the moving accumulated value Cm according to the following formula (4). The second threshold is a positive value.
memory 32. Moreover, the constants a, b are different depending on the rotating speed of the motor 6 at the current moment and a selected dewatering condition. Thus, as for the second threshold herein, multiple values exist at the same rotating speed. It shall be noted that the second threshold is a value not influenced by the α value, and this case is further defined through the formula (4). - Then, the
control part 30 confirms whether the rotating speed of the motor 6 at the current moment is less than 730rpm (step S86). - Under a condition that the rotating speed of the motor 6 at the current moment is less than 730rpm ("yes" in step S86),the
control part 30 determines whether a newest moving accumulated value Cm falls in the range of detection 4-1 (step S87). -
FIG. 17 is a diagram illustrating a relationship between the rotating speed and the moving accumulated value Cm in combination with detection 4-1 and detection 4-2. InFIG. 17 , a horizontal axis represents the rotating speed (unit: rpm), and a longitudinal axis represents the moving accumulated value Cm. Referring toFIG. 17 , the second thresholds calculated in step S85 are set to be two thresholds including an upper second threshold represented by a dot dash line and a lower second threshold represented by a double dot dash line. The upper second threshold is higher than the lower second threshold. The upper second threshold and the lower second threshold vary along with the rotating speed. - As for the dewatering conditions, there exists the following three dewatering conditions: carrying out the dewatering operation after "water storage rinsing" of rinsing the washings Q with the water stored in the
dewatering tank 4; "water splashing and dewatering" of carrying out the dewatering operation by draining water when splashing the water to the washings Q; the above "restarting process", etc. The dewatering conditions are selected by the user through operating theoperation part 10, and the selection is received by thecontrol part 30. In the dewatering operation after washing operation and water storage rinsing, of the motor 6 is hard to accelerate since the washings Q contain a great quantity of water, while under the condition of water splashing and dewatering and the restarting process, acceleration of the motor 6 may be realized with very tiny force because the water is removed from the washings Q to some extent. - In the dewatering operation after the washing operation and water storage rinsing, the
control part 30 uses the upper second threshold higher than the lower second threshold because it is difficult to execute detection with the lower second threshold. On the other hand, in the dewatering operation after water splashing and dewatering and the restarting process, thecontrol part 30 uses the lower second threshold lower than the upper second threshold because the detection is not accurate if the upper second threshold is used. Thus, under either the condition that the washings Q contain a great quantity of water or under the condition that the water of the washings Q are removed to some extent, detection 4-1 is executed with the second threshold suitable for the respective conditions. - Moreover, based on the objective same as a difference between such dewatering conditions, under the condition that the load of the washings Q in the
dewatering tank 4 is large, thecontrol part 30 uses the upper second threshold higher than the lower second threshold in detection 4-1 because it is difficult to execute the detection with the lower second threshold. Moreover, under the condition that the load of the washings Q in thedewatering tank 4 is small, thecontrol part 30 uses the lower second threshold lower than the upper second threshold in detection 4-1 because the detection is not accurate if the upper second threshold is used. Thus, detection 4-1 is executed with the second threshold suitable for different loads of the washings Q respectively. - It shall be noted that in
FIG, 17 , although the two second thresholds including the upper second threshold and the lower second threshold are illustrated, more than 3 second thresholds may also be set according to various dewatering conditions and the loads. - Moreover, compared with the condition that the washings Q are not biased due to smaller eccentricity (referring to a solid line in
FIG. 17 ), under the condition that the washings Q are biased due to larger eccentricity (referring to the dotted lines inFIG. 17 ), the moving accumulated value Cm at each rotating speed is larger. If the washings Q are greatly biased, the moving accumulated value Cm is larger than the set second threshold, i.e. a corresponding one of the upper second threshold and the lower second threshold. - Returning to
FIG. 16 , when the newest moving accumulated value Cm reaches the second threshold for a corresponding moment, thecontrol part 30 determines that the washings Q are biased in thedewatering tank 4 and the moving accumulated value Cm falls in the range of detection 4-1 ("yes" in step S87). - When the
control part 30 determines that the moving accumulated value Cm falls in the range of detection 4-1 ("yes" in step S87), the processes in steps S41∼S44 will be executed (referring toFIG. 12 ). The processes in steps S80∼S87 are included in the above step S72 (referring toFIG. 15 ). - Next, if it is determined in detection 4-1 that the washings Q are not biased, the
control part 30 ends detection 4-1 and then starts detection 4-2 (step S88) when the rotating speed of the motor 6 reaches 730rpm ("no" in step S86). -
FIG. 18 is a flow chart illustrating a control action regarding detection 4-2. Referring toFIG. 18 , in the case that the motor 6 continues to accelerate, thecontrol part 30 starts detection 4-2 (step S88) as the rotating speed of the motor 6 reaches 730rpm. - Next, the
control part 30 starts to count through the counter 34 (step S89), and initializes the counter 34 per 0.3s so as to carry out counting within each 0.3s (steps S90∼S91). - Similar to step S84 in detection 4-1, upon each counting, the
control part 30 acquires the rotating speed of the motor 6 at the time of each counting and the duty ratio dm of the voltage applied to the motor 6 at the time of counting, and calculates the correction value Bm and the moving accumulated value Cm (step S92). - Next, the
control part 30 calculates the second threshold (step S93) related to the moving accumulated value Cm according to the formula (4). The constants "a", "b" included in the formula are same as those used in detection 4-1, and are different depending on the rotating speed of the motor 6 at the current moment and the selected dewatering condition. Therefore, at the same rotating speed, the second threshold herein may have multiple values like the upper second threshold and the lower second threshold described above. - Next, the
control part 30 confirms whether the rotating speed of the motor 6 at the current moment reaches the target rotating speed (800rpm) (step S94). - In the case that the rotating speed of the motor 6 at the current moment dos not reach the target rotating speed ("yes" in step S94), the
control part 30 determines whether the newest moving accumulated value Cm falls in the range of the detection 4-2 (step S95) as it does in detection 4-1 (step S87). - Specifically, by referring to
FIG. 17 , compared with the situation that the washings Q are not biased due to small eccentricity (referring to the solid line inFIG. 17 ), in the situation that the washings Q are biased due to larger eccentricity (referring to the dotted line inFIG. 17 ), the moving accumulated value Cm for each rotating speed is larger. If the washings Q are greatly biased, the moving accumulated value Cm is larger than the set second thresholds, i.e., a corresponding one of the upper second threshold and the lower second threshold. - Returning to
FIG. 18 , if the newest moving accumulated value Cm is not less than the set second threshold, thecontrol part 30 determines that the washings Q are biased in thedewatering tank 4 and the moving accumulated value Cm falls in the range of detection 4-2 ("yes" in step S95). - When it is determined that the moving accumulated value Cm falls in the range of detection 4-2 ("yes" in step S95), the
control part 30 acquires the rotating speed L of the motor 6 (step S96) at the judged time point, i.e., the time point when it is detected in detection 4-2 that the washings Q are biased. - Next, the
control part 30 causes the motor 6 to stably rotate at the acquired rotating speed L, strictly speaking, a rotating speed obtained by rounding off the digit in the units position of the rotating speed L, so that the washings Q are continuously dewatered (step S79). At this moment, thecontrol part 30 prolongs dewatering time at the rotating speed L so as to obtain a dewatering effect same as that obtained through the dewatering at the original target rotating speed of 800rpm. - Next, if it is determined in detection 4-2 that the washings Q are not biased, the
control part 30 ends detection 4-2 and causes the motor 6 to stably rotate at 800rpm so as to continue to dewater the washings Q (the above step S78) when the rotating speed of the motor 6 reaches the target rotating speed ("no" in step S94). - In this way, in the third acceleration stage, the biasing of the washings Q in the
dewatering tank 4 is double detected in a mode adopting information values (such as Cn) and the first threshold (i.e.,detections 1∼3), and a mode adopting the duty ratio dm and the second thresholds (i.e., detection 4), so that eccentric rotation of thedewatering tank 4 may be reliably inhibited early. - The present disclosure is not limited to the embodiments as described above, but various changes may be made within a scope recorded in the claims.
-
FIG. 19 is a flow chart illustrating a first modification of the control action ofdetection 3 in the third acceleration stage. It shall be noted that, throughout the drawings includingFIG. 19 , same reference numerals are used for same steps in other diagrams, and detailed description with respect to the repeated steps is omitted. By referring toFIG. 19 , like indetection 3, thecontrol part 30 causes the motor 6 to accelerate to the target rotating speed of 800rpm (step S61), and enabled the count value "n" to be added by 1 (step S63) once the interruption W is inputted ("yes" in step S62). In the third acceleration stage, thecontrol part 30 starts detection 3 (step S64). Next, after it is determined that thedetection 3 is OK ("yes" in step S65), thecontrol part 30 endsdetection 3 and resets the count value n to zero when the rotating speed of the motor 6 reaches 800rpm ("yes" in step S66), so that the motor 6 stably rotates at 800rpm, and dewatering continues (step S67). - In the first modification, during
detection 3, thecontrol part 30 monitors a maximum Gmax of G when the rotating speed of the motor 6 is 250∼300rpm (step S68). With respect to the maximum Gmax, a specified reference value smaller than the first threshold is set and stored in thememory 32. If the maximum Gmax does not exceed the reference value ("yes" in step S68), thecontrol part 30 increases all of the second thresholds adopted in detection 4 (step S69). - That is, if the maximum Gmax in
detection 3 is less than the reference value, thedewatering tank 4 is at least in a state of being in static balance. If thedewatering tank 4 is in a state that the balance can be achieved statically or dynamically, although it is OK in both ofdetection 3 anddetection 4, longitudinal shaking of thedewatering tank 4 may also be sensitively detected by the concurrently executeddetection 4 even ifdetection 3 is OK in a state of dynamic imbalance. Thus, it can be imagined that, if the Cm indetection 4 is too large, the NG is caused. As a result, a poor condition of rotation stopping of thedewatering tank 4 may occur whendetection 4 is carried out although vibrations of theouter tank 3 and thedewatering tank 4 are not large. - In order to prevent such poor condition, the
control part 30 estimates that the vibrations of theouter tank 3 and thedewatering tank 4 are not large and carries out a control of widening the second thresholds ofdetection 4 in step S69 as long as the maximum Gmax indetection 3 is a low value below the reference value ("yes" in step S68). That is, error detection ofdetection 4 adopting the duty ratio dm is prevented throughdetection 3. -
FIG. 20 relates to a second modification of the control action indetection 3, and is a schematic diagram illustrating the interior of thedewatering tank 4 in the dewatering operation. For example, as shown inFIG. 20(a) , the washings Q in thedewatering tank 4 might be arranged in thedewatering tank 4 with a first washing Q1 and a second washing Q2 being placed at a half of thedewatering tank 4 relative to thecentral axis 17. When thedewatering tank 4 rotates at the high speed of 800rpm in the state, thedewatering tank 4 which is perfectly round initially deforms into an elliptic shape with a long edge formed in an opposite position direction of the first washing Q1 and the second washing Q2, as shown inFIG. 20 (b) , and may contact with thecircumferential wall 3A of theouter tank 3. In order to prevent such problem, in the third acceleration stage, control ofdetection 3 of the second modification shown inFIG. 21 may be implemented. - By referring to
FIG. 21 , thecontrol part 30 causes the motor 6 to accelerate to the target rotating speed of 800rpm (step S61), and enables the count value n to be added by 1 (step S63) once the interruption W is inputted ("yes" in step S62), as it does indetection 3. In the third acceleration stage, thecontrol part 30 starts detection 3 (step S64). Next, after it is determined thatdetection 3 is OK ("yes" in step S65), thecontrol part 30 endsdetection 3, resets the count value n to zero and causes the motor 6 to steadily rotate at 800rpm so as to continuously carry out dewatering (step S67) when the rotating speed of the motor 6 reaches 800rpm ("yes" in step S66). - With respect to the maximum Gmax in
detection 1, a specified first reference value smaller than the first threshold is set; with respect to the maximum Gmax indetection 2, a specified second reference value smaller than the first reference value is set; and with respect to the maximum Gmax indetection 3 when the rotating speed of the motor 6 is 250∼300rpm, a specified third reference value smaller than the second threshold is set. The first reference value -the third reference value are stored in thememory 32. - As for
detection 3 of the second modification, the previous maximum Gmax indetection 1 never exceeds the first reference value ("yes" in step S101), the previous maximum Gmax indetection 2 never exceeds the second reference value ("yes" in step S102), and if the maximum Gmax indetection 3 when the rotating speed of the motor 6 is 250∼300rpm never exceeds the third reference value ("yes" in step S103), thecontrol part 30 decreases all the second thresholds in detection 4 (step S104). - That is, as long as the maximums Gmax in respective detection among
detections 1∼3 are smaller values below the corresponding reference values ("yes" in steps S101∼S103), the washings Q in thedewatering tank 4 may be in a state of being evenly distributed in thedewatering tank 4 or in a state of being tidily divided into two parts, as shown inFIG. 20 . - Thus, as long as the maximums Gmax in respective detection among
detections 1∼3 are smaller values below the corresponding reference values ("yes" in steps S101∼S103), thecontrol part 30 decreases the second thresholds (step S104) if the washings Q in thedewatering tank 4 are assumed to be in a state of being divided into two parts. Therefore, indetection 4 which is executed in parallel withdetection 3, before thedewatering tank 4 deforms greatly toward the elliptic shape, detection 4-2 is enabled to be NG in step S95, so as to continue the dewatering operation at the rotating speed that makes thedewatering tank 4 not contact with theouter tank 3 in step S79 (referring toFIG. 18 ). - As described above, in the
modifications control part 30 properly changes the second thresholds according to the maximum Gmax of the accumulated values G in at least one of the first acceleration stage, the second acceleration stage and the third acceleration stage. Therefore, by changing the second thresholds to be suitable for the current situation in thedewatering tank 4, the biasing of the washings Q may be detected with high accuracy, so that eccentric rotation of thedewatering tank 4 is inhibited early. It shall be noted that, controls of themodification 1 and themodification 2 may also be carried out in parallel. -
FIG. 22 andFIG. 23 are flow charts illustrating a control action of a third modification in the dewatering operation. As described above, thedewatering machine 1 may electrically detect eccentric rotation of thedewatering tank 4 throughdetections 1∼4, and may also mechanically detect eccentric rotation of thedewatering tank 4 through thesafety switch 36. That is, the biasing of the washings Q may be double detected in an electric mode and a mechanical mode. The electric mode is a mode of carrying out detection based on a relationship of information values (i.e., the accumulated value G, the moving accumulated value Cm, the first threshold and the second threshold) related to the rotation state of the motor 6 at 800rpm, and the mechanical mode is a mode of carrying out detection through contact between thesafety switch 36 and theouter tank 3. Therefore, either in the case that it is determined indetections 1∼4 that the washings Q are biased, or in the case that the eccentric rotation of thedewatering tank 4 is detected by thesafety switch 36, thecontrol part 30 causes thedewatering tank 4 to stop rotating. - Both of the mechanical mode and the electric mode are expected to detect eccentric rotation of the
dewatering tank 4 at a same moment. However, in thedewatering machine 1 in a shipment stage, due to a difference between relative positions of thedewatering tank 4 and thesafety switch 36 caused by an inclined error of thedewatering tank 4 among individuals of thedewatering machine 1, the first thresholds and the second thresholds of somedewatering machines 1 may not be proper. As a result, there is a time deviation between the mechanical detection and the electrical detection. Then, when thedewatering machine 1 is used, the deviation may be eliminated by correcting the first thresholds and the second thresholds. Although description is made regarding correcting the first thresholds indetection 1, the present disclosure is not limited to only correcting the first thresholds indetection 1, and the first thresholds in detections 2-3 and the second thresholds indetection 4 may also be corrected. - By referring to
FIG. 22 , thecontrol part 30 causes thedewatering tank 4 to rotate and start dewatering as the initial dewatering operation after shipment starts (step S111). Along with starting of dewatering,detection 1 is carried out in the first stage. At this time, when thesafety switch 36 is switched to "on" ("yes" in step S112), thecontrol part 30 uses the count value n at this time as nx and uses the accumulated value G at this time as Gx (step S113). The first threshold when the count value n is nx is a value acquired by subtracting the first specified value from nx in the present embodiment. The first specified value is a positive value. - The
control part 30 determines whether a value obtained by subtracting Gx from the previous first threshold is above a second specified value J (step S114). The second specified value J is a positive value. In the case that a difference between the first threshold and the Gx is below the second specified value J ("no" in step S 114), since there substantially does not exist a time deviation between the moment that the eccentric rotation is detected bydetection 1 and the moment that the eccentric rotation is detected by thesafety switch 36, the first threshold may be determined as proper, and thecontrol part 30 continuously carries out operation without changing the first threshold (step S 115). - In the case that the difference between the first threshold and Gx is above the second specified value J ("yes" in step S 114), it can be determined that there exists a time deviation between the moment at which the eccentric rotation is detected by
detection 1 and the moment at which the eccentric rotation is detected by thesafety switch 36. Therefore, it can be determined that the moment at which the eccentric rotation is detected bydetection 1 may be slower than that at which the eccentric rotation is detected by thesafety switch 36. However, since the deviation may have occurred by accident, thecontrol part 30 enables a correction alternate value U, the factory default of which is zero, to be added by 1 temporarily (step S116). If the correction alternate value U added by 1 is smaller than a specified upper limit value (which is 3 herein) ("no" in step S1117), thecontrol part 30 does not change the first threshold and enables operation to continue (step S118). - On the other hand, if the correction alternate value U added by 1 reaches the upper limit value ("yes" in step S 117), the current first threshold is not proper because there apparently exists a time deviation between the moment at which the eccentric rotation is detected by
detection 1 and the moment at which the eccentric rotation is detected by thesafety switch 36. Therefore, thecontrol part 30 sets a value acquired by subtracting the second specified value J from the first threshold as a new first threshold, so as to change and decrease the first threshold (step S 119). Next, thecontrol part 30 resets the correction alternate value U to zero (step S120) and enables operation to continue (step S121). - In this way, if a difference between the accumulated value Gx and the first threshold when eccentric rotation of the
dewatering tank 4 is detected by thesafety switch 36 is above a specified value ("yes" in step S114), thecontrol part 30 corrects the first threshold (step S119). Therefore, indetection 1 of dewatering after the first threshold being corrected, whether the washings Q are biased may be detected with high accuracy through the corrected first threshold, so that eccentric rotation of thedewatering tank 4 is inhibited early. - By referring to
FIG. 23 , under a condition that thesafety switch 36 is not started ("no" in step S 112), if the accumulated value G does not exceed the first threshold ("no" in step S113), thecontrol part 30 does not change the correction alternate value which is zero initially (step S132) and enables the operation to continue (step S133). - On the other hand, under a condition that the
safety switch 36 is not started ("no" in step S112), when the accumulated value G reaches the first threshold and the detect result ofdetection 1 is NG ("yes" in step S113), thecontrol part 30 sets the count value n at this moment to be ny and set the accumulated value G at this moment to be Gy. The first threshold when the count value n is ny is a value acquired by subtracting the first specified value from ny in the present embodiment. - The
control part 30 determines whether Gy is above a value T obtained by adding the first threshold and a third specified value together (step S135). The third specified value is a positive value. Under a condition that Gy is less than T ("no" in step S135), since there substantially exists no time deviation between the moment at which the eccentric rotation is detected bydetection 1 and the moment at which the eccentric rotation is detected by thesafety switch 36, the first threshold is determined to be proper. Therefore, thecontrol part 30 does not change the first threshold and enables the operation to continue (step S136). - Under a condition that Gy is above T ("yes" in step S135), it can be determined that there exists a time deviation between the moment at which the eccentric rotation is detected by
detection 1 and the moment at which the eccentric rotation is detected by thesafety switch 36, and the moment at which the eccentric rotation is detected bydetection 1 is much earlier than that at which the eccentric rotation is detected by thesafety switch 36. However, since the deviation might have occurred by accident, thecontrol part 30 enables a correction alternate value V to be added by 1 temporarily (step S137). Under a condition that the correction alternate value V added by 1 is less than a specified upper limit value (which is 3 herein) ("no" in step S138), thecontrol part 30 does not change the first threshold and enables the operation to continue (step S139). - On the other hand, under a condition that the correction alternate value V added by 1 reaches the specified upper limit value ("yes" in step S138), the first threshold is not proper because there apparently exists a time deviation between the moment at which the eccentric rotation is detected by
detection 1 and the moment at which the eccentric rotation is detected by thesafety switch 36. Therefore, thecontrol part 30 sets a value obtained by adding the first threshold and the third specified value together to be a new first threshold, thereby changing the first threshold and enabling the first threshold to be widened (step S140). Next, thecontrol part 30 resets the correction alternate value V to zero (step S141) and enables the operation to continue (step S142). - In this way, if the
control part 30 determines that the washings Q are biased before eccentric rotation is detected by the safety switch 36 ("yes" in step S131), the first threshold is corrected (step S140). Thus, indetection 1 of dewatering after the first threshold being corrected, biasing of the washings Q may be detected with high accuracy through the corrected first threshold, so that eccentric rotation of thedewatering tank 4 is inhibited early. It shall be noted that, themodification 3 may also be combined withmodification 1 andmodification 2. - Next, description is made to a fourth modification. With respect to the
safety switch 36, the following conditions may be imagined: although vibration of thedewatering tank 4 is not so large, due to a moving mode of theouter tank 3, thesafety switch 36 may be started by light contact with theouter tank 3. In order to prevent thedewatering tank 4 from stopping rotating caused by error detection of such mechanical mode, a control action of the fourth modification is carried out in parallel withdetection 1. In the control action of the fourth modification, a threshold, different from the first threshold, is used (which is set to be a fourth threshold). The fourth threshold may also be a value same as the first threshold. However, preferably, the fourth threshold is a value lower than the first threshold. In the following, description is made on a premise that the fourth threshold is slightly less than the first threshold. -
FIG. 24 is a flow chart illustrating a control action of the fourth modification. By referring toFIG. 24 , thecontrol part 30 enables thedewatering tank 4 to rotate and starts dewatering (step S151) along with starting of the dewatering operation. Along with dewatering,detection 1 is carried out in the first acceleration stage. At this time, when thesafety switch 36 is switched to "on" ("yes" in step S152), thecontrol part 30 sets the accumulated value G at this time to be Gz (step S153). - The
control part 30 determines whether Gz is above the fourth threshold (step S154). If Gz is above the fourth threshold ("yes" in step S154), a result of starting thesafety switch 36, i.e., detection carried out by thesafety switch 36, is normal since the moment at which eccentric rotation is detected bydetection 1 and the moment at which eccentric rotation is detected by thesafety switch 36 are deemed to be consistent approximately. Therefore, thecontrol part 30 determines that the washings Q are biased and causes thedewatering tank 4 to stop rotating (step S155). It shall be noted that, sincedetection 1 is executed simultaneously, thecontrol part 30 may also determine that the washings Q are biased (step S33 inFIG. 9B ) and cause thedewatering tank 4 to stop rotating (step S41 inFIG. 12 ) when the accumulated value G becomes above the first threshold ("yes" in step S32 inFIG. 9B ), even if thesafety switch 36 is not started ("no" in step S152). - On the other hand, under a condition that Gz when the
safety switch 36 is started is less than the fourth threshold ("no" in step S 154), thecontrol part 30 determines that vibration of thedewatering tank 4 is negligibly small, thesafety switch 36 is considered to be subjected to false starting and the operation is continued (step S156). Therefore, a success rate of the dewatering operation may be improved. - However, when the
safety switch 36 is restarted while the operation is continuing hereafter, and the starting number of thesafety switch 36 reach a specified number (which is 3 herein) from the beginning of dewatering operation ("yes" in step S157), thecontrol part 30 determines that thesafety switch 36 is started normally and the washings Q are biased, and causes thedewatering tank 4 to stop rotating (step S155). In other words, until times of eccentric rotation detected by thesafety switch 36 before it is determined that the washings Q are biased reach the specified number ("no" in step S157), thecontrol part 30 suspends rotation stopping of thedewatering tank 4, and the operation continues. Therefore, rotation stopping of thedewatering tank 4 caused by false detection of the mechanical mode of thesafety switch 36 may be prevented, and eccentric rotation of thedewatering tank 4 is inhibited early. It shall be noted that, the specified number herein is not limited to 3 and may also be 1. Moreover, preferably, the control action of themodification 4 is executed in the first acceleration stage where the rotating speed is low to an extent that no problem is generated even ignoring starting of thesafety switch 36 in step S156. Certainly, themodification 4 may also be combined withmodification 1,modification 2 andmodification 3. - In addition, a modification 5, as a further modification of the
modification 4, may also carry out the control action shown inFIG. 25 . In modification 5, steps S153 and S154 inmodification 4 are omitted. In this case, beginning from dewatering starting (step S151), even if thesafety switch 36 is switched on ("yes" in step S152), thecontrol part 30 may also determines that thesafety switch 36 is started by mistake and causes the operation to continue (step S156) if the starting number of thesafety switch 36 do not reach the specified number (which is 3 herein) ("no" in step S157). However, as described above, sincedetection 1 is executed simultaneously, thecontrol part 30 may cause thedewatering tank 4 to stop rotating (step S41 inFIG. 12 ) when the accumulated value G becomes above the first threshold ("yes" in step S32 inFIG. 9B ). That is, if the accumulated value G is less than the first threshold, thecontrol part 30 may neglect starting of thesafety switch 36 when the starting number is not greater than 2. - On the other hand, when the starting number of the
safety switch 36 reach 3 ("yes" in step S157), thecontrol part 30 determines that a result detected by thesafety switch 36 is normal and the washings Q are biased, thereby enabling thedewatering tank 4 to stop rotating (step S155). In other words, even in modification 5, likemodification 4, until times of eccentric rotation detected by thesafety switch 36 before it is determined that the washings Q are biased reaches the specified number ("no" in step S157), thecontrol part 30 suspends rotation stopping of thedewatering tank 4, and the operation continues. Besidesmodification 4, modification 5 may also be combined withmodifications 1∼3. However, inmodification 4, since false starting of thesafety switch 36 is determined based on the fourth threshold less than the first threshold (referring toFIG. 24 ), the biasing of the washings Q may be determined earlier compared with modification 5 so as to cause thedewatering tank 4 to stop rotating. - In the above present embodiment, on the premise that the motor 6 is a variable frequency motor, the motor 6 is controlled based on the duty ratio. However, under a condition that the motor 6 is a brush motor, the motor 6 is controlled based on the voltage applied to the motor 6 instead of the duty ratio.
- Moreover, in the above description, although specific numerical values including 120rpm, 240rpm, 800rpm, etc. are used as the rotating speed, the specific numerical values are varied according to the performance of the
dewatering machine 1. Moreover, in the above description, indetections 1∼3, the accumulated value G is calculated based on the moving average value Cn. However, if not influenced by errors, etc, the accumulated value G may also be calculated based on any information value of other information values such as An and Bn, which may be reduced as the rotating speed of the motor 6 increases. In addition, although the accumulated value G is an accumulated value of the moving average values En, the accumulated value G may also be an accumulated value of difference Dn if influences including opposite position errors of NS groups do not exist. In addition, indetection 4, although the duty ratio is acquired to perform determination, the acquired duty ratio may be original data of the acquired duty ratios, may also be a correction value corrected as needed and may also be an index value acquired by transforming the duty ratio just like the moving accumulated value Cm.
Claims (10)
- A dewatering machine, comprising:a dewatering tank, formed in a cylindrical shape with a central axis extending in a direction inclined relative to an up-down direction, wherein the dewatering tank is configured to contain washings, and rotate around the central axis so as to dewater the washings;a balancing ring, formed in a hollow annular shape, wherein the balancing ring is coaxially arranged in the dewatering tank, and liquid for achieving rotational balance of the dewatering tank is contained in the balancing ring and flows freely; anda dewatering preparation unit, configured to cause the dewatering tank, in a dewatering preparation stage for the washings, to rotate at a rotating speed lower than a lowest rotating speed at which the dewatering tank resonates, so as to detect a biased position of the washings in the dewatering tank; and cause the dewatering tank to stop rotating immediately before the washings biased in the dewatering tank are positioned, relative to the central axis, at an opposite side of the liquid biased downward in the balancing ring.
- A dewatering machine, comprising:a dewatering tank, formed in a cylindrical shape with a central axis extending in a direction inclined relative to an up-down direction, wherein the dewatering tank is configured to contain washings, and rotate around the central axis so as to dewater the washings;an electric motor, configured to cause the dewatering tank to rotate;an information value acquisition unit, configured to, when the electric motor is in an acceleration state of accelerating to a target rotating speed used for formally dewatering the washings, sequentially acquire an information value that should be decreased as a rotating speed of the electric motor increases;a counting unit, configured to add a count value with an initial value of zero by 1 once the information value acquisition unit acquires the information value;a calculation unit, configured to calculate an accumulated value of a difference between the information value and a previous information value under a condition that the information value is larger than the previous information value;a determination unit, configured to determine that the washings are biased in the dewatering tank under a condition that the accumulated value when the count value is a specified value reaches a first threshold when the count value is the specified value; anda stopping unit, configured to cause the dewatering tank to stop rotating when it is determined by the determination unit that the washings are biased.
- The dewatering machine according to claim 2, further comprising an information correction unit, wherein information correction unit is configured to correct the information value through moving average before the accumulated value is calculated by the calculation unit.
- The dewatering machine according to claim 2 or 3, further comprising an execution unit, wherein the execution unit is configured to alternatively execute any of a restarting process and a correction process under a condition that the dewatering tank is stopped rotating through the stopping unit, wherein the restarting process is a process for restarting to dewater the washings by causing the dewatering tank to rotate again, and the correction process is a process for correcting the biasing of the washings in the dewatering tank; and
the execution unit is configured to select to execute the correction process rather than selecting to execute the restarting process in the following situation: the restarting process has been executed for a specified number, and the dewatering tank is caused to stop rotating by the stopping unit. - The dewatering machine according to any one of claims 2-4, further comprising an acceleration unit, wherein the acceleration unit causes the electric motor to accelerate in three stages including a first acceleration stage, a second acceleration stage and a third acceleration stage, wherein
the first acceleration stage refers to an acceleration stage, in which the motor accelerates toward the target rotating speed from starting rotating until the rotating speed of the motor reaches a first rotating speed, wherein the first rotating speed is higher than a rotating speed at which the dewatering tank resonates transversely and lower than a rotating speed at which the dewatering tank resonates longitudinally,
the second acceleration stage is an acceleration stage, in which the rotating speed of the motor increases from the first rotating speed to a second rotating speed higher than the first rotating speed,
the third acceleration stage is an acceleration stage, in which the rotating speed of the motor increases from the second rotating speed to the target rotating speed,
the first threshold is independently set in the first acceleration stage, the second acceleration stage and the third acceleration stage respectively, and
the information value acquisition unit is configured to acquire the information value in the first acceleration stage, the second acceleration stage and the third acceleration stage respectively, the counting unit causes the count value to be added by 1 and calculates the accumulated value, and the determination unit determines that the washings are biased in the dewatering tank when the accumulated value reaches the first threshold. - The dewatering machine according to claim 5, further comprising:a duty ratio acquisition unit, configured to acquire a duty ratio of voltage applied to the motor at each specified time in the third acceleration stage; anda transformation unit, configured to transform the duty ratio acquired by the duty ratio acquisition unit into a specified index value,when the index value reaches a second threshold for a corresponding time, the determination unit determines that the washings are biased in the dewatering tank.
- The dewatering machine according to claim 6, further comprising a threshold modification unit, wherein the threshold modification unit is configured to modify the second threshold according to the accumulated value in at least one acceleration stage of the first acceleration stage, the second acceleration stage and the third acceleration stage.
- The dewatering machine according to any one of claims 5-7, wherein when a variation of the accumulated value reaches a third threshold, the determination unit determines that the washings are biased in the dewatering tank.
- A dewatering machine, comprising:a dewatering tank, formed in a cylindrical shape with a central axis extending in a direction inclined relative to an up-down direction, wherein the dewatering tank is configured to contain washings, and rotate around the central axis so as to dewater the washings;an outer tank, configured to contain the dewatering tank;an electric motor, configured to cause the dewatering tank to rotate;a determination unit, configured to determine that the washings are biased in the dewatering tank when an information value, relevant to a rotation state of the electric motor before a rotating speed of the electric motor reaches a target rotating speed used for formally dewatering the washings, reaches a threshold;a detection unit, configured to mechanically detect eccentric rotation of the dewatering tank by contacting the outer tank when the dewatering tank eccentrically rotates along with biasing of the washings in the dewatering tank and the outer tank is caused to vibrate;a stopping unit, configured to cause the dewatering tank to stop rotating in one of the following situations: it is determined by the determination unit that the washings are biased; the eccentric rotation of the dewatering tank is detected by the detection unit; anda threshold correction unit, configured to correct the threshold in one of the following situations: a difference between the information value and the threshold is above the specified value when the eccentric rotation of the dewatering tank is detected by the detection unit; it is determined by the determination unit that the washings are biased before the eccentric rotation is detected by the detection unit.
- A dewatering machine, comprising:a dewatering tank, formed in a cylindrical shape with a central axis extending in a direction inclined relative to an up-down direction, wherein the dewatering tank is configured to contain washings, and rotate around the central axis so as to dewater the washings;an outer tank, configured to contain the dewatering tank;an electric motor, configured to cause the dewatering tank to rotate;a determination unit, configured to determine that the washings are biased in the dewatering tank when an information value, relevant to a rotation state of the electric motor before a rotating speed of the electric motor reaches a target rotating speed used for formally dewatering the washings, reaches a threshold;a detection unit, configured to mechanically detect eccentric rotation of the dewatering tank by contacting the outer tank when the dewatering tank eccentrically rotates along with biasing of the washings in the dewatering tank and the outer tank is caused to vibrate;a stopping unit, configured to cause the dewatering tank to stop rotating in one of the following situations: it is determined by the determination unit that the washings are biased; the eccentric rotation of the dewatering tank is detected by the detection unit; anda suspending unit, configured to suspend an operation performed by the stopping unit for stopping the rotation of the dewatering tank, until a detection number of the detection unit reaches a specified number before it is determined by the determination unit that the washings are biased.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014252413A JP6467703B2 (en) | 2014-12-12 | 2014-12-12 | Dehydrator |
| PCT/CN2015/097173 WO2016091215A1 (en) | 2014-12-12 | 2015-12-11 | Dehydrator |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP3231918A1 true EP3231918A1 (en) | 2017-10-18 |
Family
ID=56106744
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP15867010.9A Withdrawn EP3231918A1 (en) | 2014-12-12 | 2015-12-11 | Dehydrator |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20170321363A1 (en) |
| EP (1) | EP3231918A1 (en) |
| JP (1) | JP6467703B2 (en) |
| KR (1) | KR101917973B1 (en) |
| CN (1) | CN107109749B (en) |
| WO (1) | WO2016091215A1 (en) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10829916B2 (en) * | 2017-04-26 | 2020-11-10 | Delta Faucet Company | User interface for a faucet |
| JP7252534B2 (en) * | 2018-11-26 | 2023-04-05 | 青島海爾洗衣机有限公司 | Dehydrator |
| KR20230126131A (en) * | 2022-02-22 | 2023-08-29 | 삼성전자주식회사 | Washing machine and controlling method for the same |
Family Cites Families (48)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4054412A (en) * | 1976-12-09 | 1977-10-18 | General Electric Company | Clothes washing machine and method of washing clothes |
| JPH02297399A (en) * | 1989-03-27 | 1990-12-07 | Hitachi Ltd | Dryer and washer combinedly used as dryer |
| JPH03186292A (en) * | 1989-12-18 | 1991-08-14 | Hitachi Ltd | Washing machine |
| US5887456A (en) * | 1995-08-30 | 1999-03-30 | Sharp Kabushiki Kaisha | Drum type drying/washing machine |
| JPH09313766A (en) * | 1996-01-31 | 1997-12-09 | Sharp Corp | Drum type drying/washing mace, drum type drier, and operating method for drum type drying/washing machine |
| JP3171568B2 (en) * | 1997-08-29 | 2001-05-28 | 株式会社東芝 | Washing machine |
| JP3713613B2 (en) * | 1997-10-23 | 2005-11-09 | 三菱電機株式会社 | Unbalance correction device for dehydrator |
| JP3648949B2 (en) * | 1997-10-31 | 2005-05-18 | 三菱電機株式会社 | Method and apparatus for controlling imbalance of dehydrator |
| JP3311668B2 (en) * | 1998-03-06 | 2002-08-05 | 三洋電機株式会社 | Drum type centrifugal dehydrator |
| JP3423270B2 (en) * | 2000-03-30 | 2003-07-07 | 三洋電機株式会社 | Drum type washing machine |
| KR100347760B1 (en) * | 2000-04-19 | 2002-08-09 | 엘지전자주식회사 | Washing machine having tilting washing drum |
| US6578225B2 (en) * | 2000-05-25 | 2003-06-17 | Skf Autobalance Systems Ab | Low-speed prebalancing for washing machines |
| CN1183283C (en) * | 2000-06-23 | 2005-01-05 | 惠尔普尔公司 | Method and hanging system for reducing displacement of dolly tub during high speed dewatering circulation |
| JP2002028393A (en) * | 2000-07-13 | 2002-01-29 | Sanyo Electric Co Ltd | Fully automatic washing machine |
| JP3651595B2 (en) * | 2001-12-13 | 2005-05-25 | 株式会社東芝 | Inverter device for washing machine and inverter device for washing dryer |
| KR100471350B1 (en) * | 2002-05-17 | 2005-03-08 | 엘지전자 주식회사 | Control method of dehydration for a drum washing machine |
| JP2004130059A (en) * | 2002-10-10 | 2004-04-30 | Lg Electronics Inc | Spin-drying operation controlling method for drum type washing machine |
| KR100493300B1 (en) * | 2002-11-25 | 2005-06-07 | 엘지전자 주식회사 | Apparatus and Method for Controlling Dehydrating Course of The Washing Machine |
| KR20040059222A (en) * | 2002-12-28 | 2004-07-05 | 엘지전자 주식회사 | method for detecting unbalance of dehydration tub and method for controlling operation of washing machine by using the same |
| KR100504866B1 (en) * | 2003-01-15 | 2005-08-01 | 엘지전자 주식회사 | Method for controlling dehydration speed of drum washing machine |
| KR100480133B1 (en) * | 2003-01-16 | 2005-04-07 | 엘지전자 주식회사 | Drum type washing machine and drive control method thereof |
| JP3977762B2 (en) * | 2003-03-06 | 2007-09-19 | 株式会社東芝 | Drum washing machine |
| JP2004321320A (en) * | 2003-04-22 | 2004-11-18 | Sharp Corp | Washing machine |
| US7591038B2 (en) * | 2003-04-28 | 2009-09-22 | Emerson Electric Co., | Method and system for operating a clothes washing machine |
| US7905122B2 (en) * | 2003-04-28 | 2011-03-15 | Nidec Motor Corporation | Method and system for determining a washing machine load unbalance |
| KR100671193B1 (en) * | 2003-06-06 | 2007-01-18 | 산요덴키가부시키가이샤 | Drum type washing machine |
| WO2005010267A1 (en) * | 2003-07-25 | 2005-02-03 | Lg Electronics Inc. | Semi-dry method of washing machine and the ventilating structure, control apparatus for the same |
| KR100587307B1 (en) * | 2004-06-09 | 2006-06-08 | 엘지전자 주식회사 | Drum type washing machine and drum of drum type washing machine |
| JP4563120B2 (en) * | 2004-09-13 | 2010-10-13 | パナソニック株式会社 | Drum washing machine |
| US8033145B2 (en) * | 2005-05-13 | 2011-10-11 | Sharp Kabushiki Kaisha | Drum-type washing machine |
| JP2007050114A (en) * | 2005-08-18 | 2007-03-01 | Toshiba Corp | Washing machine |
| JP4822974B2 (en) * | 2006-08-02 | 2011-11-24 | 三洋電機株式会社 | Washing machine |
| JP2008073311A (en) * | 2006-09-22 | 2008-04-03 | Mitsubishi Electric Corp | Inclined-type washing machine |
| KR101156713B1 (en) * | 2006-11-06 | 2012-06-15 | 삼성전자주식회사 | Drum Washing machine and control method thereof |
| AU2008325307A1 (en) * | 2007-11-08 | 2009-05-14 | Fisher & Paykel Appliances Limited | Slow speed drive method for an electronically commutated motor, controller implementing same, washing machine incorporating same |
| EP2352873B9 (en) * | 2008-09-10 | 2013-08-21 | Carnehammar, Lars Bertil | Method, system and device for reducing vibration in an article processing machine, such as a washing machine |
| JP2010125083A (en) * | 2008-11-27 | 2010-06-10 | Samsung Electronics Co Ltd | Rotating apparatus having ball balancer |
| AU2009327647B2 (en) * | 2008-12-17 | 2012-07-19 | Fisher & Paykel Appliances Limited | A laundry machine |
| DE102010002048A1 (en) * | 2010-02-17 | 2011-08-18 | BSH Bosch und Siemens Hausgeräte GmbH, 81739 | Method for setting a spin speed of a drum of a domestic appliance for the care of laundry items |
| JP5650927B2 (en) * | 2010-05-20 | 2015-01-07 | ハイアール グループ コーポレーション | Washing machine |
| JP2011240041A (en) * | 2010-05-20 | 2011-12-01 | Sanyo Electric Co Ltd | Washing machine |
| JP2012120687A (en) * | 2010-12-08 | 2012-06-28 | Samsung Yokohama Research Institute Co Ltd | Rotating device having ball balancer |
| KR20120100321A (en) * | 2011-03-03 | 2012-09-12 | 엘지전자 주식회사 | A control method of washing machine |
| JP2013220255A (en) * | 2012-04-18 | 2013-10-28 | Toshiba Corp | Washing machine |
| US9518351B2 (en) * | 2013-11-13 | 2016-12-13 | Haier Us Appliance Solutions, Inc. | Washing machine appliance |
| US9163346B2 (en) * | 2014-01-29 | 2015-10-20 | Alliance Laundry Systems, Llc | Washing machine control system and methods |
| US10066333B2 (en) * | 2014-02-21 | 2018-09-04 | Samsung Electronics Co., Ltd. | Washing machine with ball balancer and method of controlling vibration reduction thereof |
| CN104005200A (en) * | 2014-05-26 | 2014-08-27 | 合肥荣事达三洋电器股份有限公司 | Vibration quantity detection device and method for drum washing machine |
-
2014
- 2014-12-12 JP JP2014252413A patent/JP6467703B2/en active Active
-
2015
- 2015-12-11 WO PCT/CN2015/097173 patent/WO2016091215A1/en active Application Filing
- 2015-12-11 EP EP15867010.9A patent/EP3231918A1/en not_active Withdrawn
- 2015-12-11 CN CN201580067405.XA patent/CN107109749B/en active Active
- 2015-12-11 KR KR1020177019313A patent/KR101917973B1/en active IP Right Grant
- 2015-12-11 US US15/535,034 patent/US20170321363A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| CN107109749B (en) | 2019-11-12 |
| US20170321363A1 (en) | 2017-11-09 |
| JP2016112136A (en) | 2016-06-23 |
| CN107109749A (en) | 2017-08-29 |
| KR20170094398A (en) | 2017-08-17 |
| WO2016091215A1 (en) | 2016-06-16 |
| KR101917973B1 (en) | 2018-11-12 |
| JP6467703B2 (en) | 2019-02-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3231918A1 (en) | Dehydrator | |
| US7340791B2 (en) | Washing machine and method of controlling the same | |
| US20080301884A1 (en) | Washing machine and method of controlling the same | |
| EP2083109A1 (en) | Drum type washing machine having ball balancers and controlling method of the same | |
| KR102005360B1 (en) | Dehydrator | |
| EP3354789B1 (en) | Washing machine and method for controlling same | |
| CN107614779B (en) | Washing machine | |
| KR101447148B1 (en) | Washing machine and control method thereof | |
| EP3739101B1 (en) | Washing machine and control method thereof | |
| EP3305959A1 (en) | Dehydrator | |
| KR20080010591A (en) | Washing machine and its operating method | |
| WO2020108431A1 (en) | Dewatering machine | |
| JP2001062185A (en) | Drum washer | |
| JP2020010773A (en) | Washing machine | |
| KR20180089966A (en) | Laundry Treating Apparatus and Control Method for the same | |
| KR20170076523A (en) | Method of reducing vibration during dehydration and washing machine using the same | |
| JP2013132346A (en) | Drum washing machine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20170712 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| DAV | Request for validation of the european patent (deleted) | ||
| DAX | Request for extension of the european patent (deleted) | ||
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: D06F 33/02 20060101ALI20180911BHEP Ipc: D06F 39/08 20060101ALI20180911BHEP Ipc: D06F 39/00 20060101ALI20180911BHEP Ipc: D06F 23/06 20060101AFI20180911BHEP Ipc: D06F 37/30 20060101ALI20180911BHEP Ipc: D06F 37/20 20060101ALI20180911BHEP Ipc: D06F 37/36 20060101ALI20180911BHEP |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN WITHDRAWN |
|
| 18W | Application withdrawn |
Effective date: 20181109 |