EP3224416B1 - Method and device for compacting the ballast bed of a track - Google Patents
Method and device for compacting the ballast bed of a track Download PDFInfo
- Publication number
- EP3224416B1 EP3224416B1 EP15808080.4A EP15808080A EP3224416B1 EP 3224416 B1 EP3224416 B1 EP 3224416B1 EP 15808080 A EP15808080 A EP 15808080A EP 3224416 B1 EP3224416 B1 EP 3224416B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- lifting
- switch
- measuring system
- lining unit
- switch component
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 9
- 238000006073 displacement reaction Methods 0.000 claims description 18
- 238000001514 detection method Methods 0.000 claims description 10
- 238000011144 upstream manufacturing Methods 0.000 claims description 10
- 230000001419 dependent effect Effects 0.000 claims description 6
- 230000001939 inductive effect Effects 0.000 claims description 5
- 210000000080 chela (arthropods) Anatomy 0.000 claims 14
- 238000005259 measurement Methods 0.000 description 8
- 210000002105 tongue Anatomy 0.000 description 8
- 238000010586 diagram Methods 0.000 description 4
- 238000013461 design Methods 0.000 description 2
- 238000012360 testing method Methods 0.000 description 2
- TVEXGJYMHHTVKP-UHFFFAOYSA-N 6-oxabicyclo[3.2.1]oct-3-en-7-one Chemical compound C1C2C(=O)OC1C=CC2 TVEXGJYMHHTVKP-UHFFFAOYSA-N 0.000 description 1
- 241000269350 Anura Species 0.000 description 1
- 229910000831 Steel Inorganic materials 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
Images





Classifications
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01B—PERMANENT WAY; PERMANENT-WAY TOOLS; MACHINES FOR MAKING RAILWAYS OF ALL KINDS
- E01B27/00—Placing, renewing, working, cleaning, or taking-up the ballast, with or without concurrent work on the track; Devices therefor; Packing sleepers
- E01B27/12—Packing sleepers, with or without concurrent work on the track; Compacting track-carrying ballast
- E01B27/13—Packing sleepers, with or without concurrent work on the track
- E01B27/16—Sleeper-tamping machines
- E01B27/17—Sleeper-tamping machines combined with means for lifting, levelling or slewing the track
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01B—PERMANENT WAY; PERMANENT-WAY TOOLS; MACHINES FOR MAKING RAILWAYS OF ALL KINDS
- E01B27/00—Placing, renewing, working, cleaning, or taking-up the ballast, with or without concurrent work on the track; Devices therefor; Packing sleepers
- E01B27/12—Packing sleepers, with or without concurrent work on the track; Compacting track-carrying ballast
- E01B27/20—Compacting the material of the track-carrying ballastway, e.g. by vibrating the track, by surface vibrators
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01B—PERMANENT WAY; PERMANENT-WAY TOOLS; MACHINES FOR MAKING RAILWAYS OF ALL KINDS
- E01B35/00—Applications of measuring apparatus or devices for track-building purposes
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01B—PERMANENT WAY; PERMANENT-WAY TOOLS; MACHINES FOR MAKING RAILWAYS OF ALL KINDS
- E01B35/00—Applications of measuring apparatus or devices for track-building purposes
- E01B35/06—Applications of measuring apparatus or devices for track-building purposes for measuring irregularities in longitudinal direction
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01B—PERMANENT WAY; PERMANENT-WAY TOOLS; MACHINES FOR MAKING RAILWAYS OF ALL KINDS
- E01B2203/00—Devices for working the railway-superstructure
- E01B2203/10—Track-lifting or-lining devices or methods
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01B—PERMANENT WAY; PERMANENT-WAY TOOLS; MACHINES FOR MAKING RAILWAYS OF ALL KINDS
- E01B2203/00—Devices for working the railway-superstructure
- E01B2203/12—Tamping devices
- E01B2203/125—Tamping devices adapted for switches or crossings
Definitions
- the invention relates to a method for controlling the lifting and straightening unit of a track-traveling switch tamping machine for compacting the ballast bedding of a track, in particular in the area of a switch, with a tamping unit, with a lifting and straightening unit that includes a roller tong, a roller tong locking cylinder with a closing path sensor, a lifting cylinder the lifting force, a hook depth cylinder with depth sensor for a lifting hook and a guide-straightening wheel for guiding the lifting-straightening unit along a rail, the position of switch components, such as switch drive boxes, rails and frogs, during the advance of the switch tamping machine with the help of a lift -Righting unit in the working direction upstream switch component measuring system is measured and temporarily stored in the transverse direction of the track depending on location, and the position of the sleepers and the intermediate compartments in the working direction is recorded and temporarily stored.
- switch components such as switch drive boxes, rails and frogs
- a device for compacting the ballast bedding of a track, in particular in the area of a switch, with a switch tamping machine which has a tamping unit, a lifting and straightening unit, a roller tong, a roller tong locking cylinder with a closing travel sensor, a lifting cylinder with the lifting force, a hook depth cylinder with a depth transmitter for a lifting hook and a guide-straightening wheel for straightening the track position and is equipped with a switch component measuring system upstream of the lifting-straightening unit in the working direction for the location-dependent measurement of the position of switch components.
- Such a device is from DE 3923733 A1 known.
- a lifting and straightening unit that can be moved in the longitudinal direction of the machine is from the CH 536901 A known.
- Turnout tamping machines are machines for correcting the track position of turnouts.
- measuring systems are used that measure the actual track height, the actual track direction and the actual cant position of the track during work and compare them with specified target values.
- the track grid is raised and laterally aligned until the difference between the specified target position and the actual position is zero.
- the switch is set by compressing the ballast under the sleepers with the help of a switch tamping unit.
- the track grid is lifted and straightened using hydraulic lifting and straightening cylinders with proportional or servo controls.
- Turnouts have a continuous track and a branching track as a special feature.
- Trains are led into the branch via so-called tongues or held on the continuous main line.
- the so-called centerpiece is located at the intersection of the continuous track and the branching track.
- the railway wheel In the area of the frog, the railway wheel must be guided from the rail of the continuous line to the rail of the branching line. Guide rails are provided so that the unguided wheel in the interruption area rolls safely into the branch or into the continuous main line.
- the tamping units can be moved sideways and, because of the sloping long sleepers, the tamping units can be rotated.
- the tamping tines can also be designed to be pivotable, at least in part.
- the rail is gripped at the head with roller tongs and lifted into the geometrical target position.
- the roller tongs are often not used because of the crossing rails and in the centerpiece possible. So that these points can also be machined (set up), lifting hooks that can be extended laterally and are height-adjustable in depth are also provided.
- the universal machines In addition to pure turnout tamping machines and track tamping machines, there are also universal machines that can be used both for track and turnout areas.
- the universal machines often have two work cabins.
- the switch tamping cabin is opposite to the working direction with regard to its viewing direction. From the switch tamping cabin, the machine operator controls the position of the tamping unit, the pick, he selects the roller tongs or the lifting hook or the position of the lifting hook as well as the point of application of the same on the rail head or on the rail foot, depending on the circumstances and discretion.
- the lifting device can also be moved in the longitudinal direction of the track.
- the turnout tamping cabin is chosen primarily because of the better view of the lifting and straightening unit of the turnout tamping machine.
- the line tamping machine is in the working direction from the viewing direction.
- the manual setting of the lifting device, the choice of roller tongs or lifting hook, the positioning of the lifting hook and the Force application point, as well as the displacement of the lifting device in the longitudinal direction of the track requires time.
- Distance measuring devices using odometers or other methods are also known. Since the target track geometry is defined in terms of the curved length of the track, the current position of the machine in terms of the track kilometrage must be recorded.
- the invention is therefore based on the object of specifying a method for automatically controlling the roller tongs and the lifting hook for lifting switches by switch tamping machines, with which the operating speed can be increased and the susceptibility to errors can be minimized.
- the invention solves the problem in that the lifting and straightening unit is guided in a longitudinally displaceable manner in the machine's longitudinal direction and the switch component measuring system has switch component detection sensors that the recorded values for the working position of the roller tongs and the lifting hook are queried so that a test is carried out on the basis of these values Whether the roller tongs can be used in this working position and, if the roller tongs cannot be used, a check is carried out on the basis of these values to determine whether the lifting hook can grip the rail head and, if this is not possible, that the lifting hook may be shifted in the longitudinal direction of the machine takes place that the lifting hook comes to stand on the rail foot in an intermediate compartment and that the lifting is carried out after gripping the rail with the lifting and straightening unit, with a Gr eifposition determined for the lifting and straightening unit and this gripping position is automatically approached before closing the roller tongs or before gripping the rail with the lifting hook, in particular by transverse displacement, longitudinal displacement and depth adjustment of the lifting and straightening unit
- the position of the switch components is detected with the switch component measuring system arranged upstream of the lifting and straightening unit in the working direction and stored as a function of the path.
- Any number of practically one-dimensional snapshots of the track cross-section can be made in plan view and stored in a database.
- a digital image of the track and, in particular, the switch components can be created from the stored data.
- the lifting and straightening unit is automatically shifted accordingly in the longitudinal direction of the track along a guide on the machine frame in order to approach a suitable point of application for the lifting and straightening tool.
- the suitable lifting and straightening tool is selected depending on the measured values of the switch component measuring system, i.e.
- roller tongs and lifting hook is automatically selected by a control or regulation.
- a control or regulation As a result of these measures, one of the two work cabins can be omitted.
- the automatic control of the roller clamp and lifting hook compensates for the deteriorated view of the roller clamp and lifting hook from the track tamping cabin and increases the working speed.
- a video system can also be used to monitor the roller tongs and lifting hooks.
- the position of the track components in particular the switch components (position of the rails, the frog, the wing rails, the switch blades, the drive boxes for the switch blades, etc.) with respect to the lifting and straightening unit in the working direction is recorded in advance depending on the path.
- the detection of these steel components can be done, for example, with the help of a series of inductive or capacitive proximity sensors, ultrasonic sensors or a laser scanner (equidistant scanning, for example, every 5 cm).
- the position of the switch components is stored as a function of the path and transposed by a computer system to the position of the roller tongs or the lifting hook.
- the path progress of the machine is measured using a path measuring device, for example an odometer.
- the previous measurements are evaluated for the respective position of the lifting and straightening unit. If there is not enough space to manipulate with the roller pliers, then it is determined automatically switched to the lifting hook. Depending on the previous measurement and the temporarily stored data for the current location of the lifting and straightening unit, the extension position of the lifting hook and the rail head as the point of application are selected first. By measuring the extended position and the closing path of the lifting hook, it can be concluded whether the head has been securely gripped by the hook or not. If the closing path is not sufficient, the hook is automatically opened again. If the lifting hook is not located above the intermediate compartment, the lifting and straightening unit is moved in the longitudinal direction of the track until the lifting hook is located above the intermediate compartment. At this new position the attempt is made to close the rail head again.
- the rail foot is selected as the point of application of force. If the roller tong does not grip the rail head successfully, this can be determined by measuring the displacement of the hydraulic locking cylinder, then the lifting and straightening unit is moved to a position in the longitudinal direction of the track where it can be closed. If there is no such position, the lifting hook with the point of application on the rail foot is automatically activated. On the side of the lifting devices (always on the outside of the rail), the measuring device records the position of the turnout components in the transverse direction of the track; the reference point is the rail track on which the turnout tamping machine and the lifting and straightening device are running.
- a gripping position for the lifting / straightening system is determined from the position of the switch components recorded with the switch component measuring system and this gripping position is automatically approached before closing the roller tongs or before gripping the rail with the lifting hook, in particular by transverse displacement, longitudinal displacement and depth adjustment of the lifting and straightening system .
- the switch component measuring system detects the position of the switch components preferably with a sensor strip comprising a large number of individual sensors, which sensor strip is arranged upstream of the lifting and straightening unit running transversely to the machine longitudinal direction and with a number of inductive sensors and / or capacitive sensors and / or laser distance sensors and / or Ultrasonic distance sensors is equipped.
- the switch component measuring system can also record the position of the switch components with at least one laser scanner.
- a device for compacting the ballast bedding of a track, in particular in the area of a switch, with a switch tamping machine, with a tamping unit, with a lifting and straightening unit that includes a roller tong, a roller tong locking cylinder with a closing travel sensor, a lifting cylinder with the lifting force, a hook depth cylinder with a depth sensor for one Has lifting hook and a guide-straightening wheel for guiding the lifting-straightening unit along a rail, for straightening the track position, and with a switch component measuring system upstream of the lifting-straightening unit in the working direction for the location-dependent measurement of the position of switch components in the transverse direction of the track, is characterized by the fact that the Lifting-straightening unit is guided longitudinally displaceably on the machine frame in the longitudinal direction of the machine and has the switch component measuring system with switch component detection sensors that the switch component measuring system measure the position of switch components depending on location and z can be temporarily stored and the position of
- the hook depth cylinder with depth sensor is assigned to the lifting hook of the lifting and straightening unit
- the roller tongs of the lifting and straightening unit can be assigned to the roller tong locking cylinder with closing travel sensor and can be assigned to the lifting
- a transverse shift cylinder with a displacement sensor can be assigned to the straightening unit.
- a particularly simple and robust switch component measuring system is obtained when it comprises a sensor strip, preferably comprising a plurality of individual sensors, which is provided on the switch tamping machine, aligned transversely to the longitudinal direction of the machine.
- the sensor strip can comprise a multiplicity of individual sensors arranged one behind the other in the longitudinal direction of the strip, that is to say in a row.
- the switch component measuring system can include inductive sensors, capacitive sensors, laser distance sensors and / or ultrasonic distance sensors or, if appropriate, at least one laser scanner.
- a turnout tamping machine 1 has a tamping unit 4 and a track lifting / straightening unit 2 with a lifting cylinder 5, roller tongs 6, a lifting hook 7 and a measuring device 3 ( Fig. 1 ).
- the lifting and straightening unit can be moved in the longitudinal direction 11 of the track by means of a hydraulic cylinder.
- the switch tamping machine can be moved on the rail 9 via drives 8.
- the turnout tamping machine 1 is controlled from the work booth 10 arranged behind the tamping unit 4 in the working direction C.
- the work cabin 10 and the driving cabs can be entered via side doors 29.
- the arc length of the track is determined with a distance measuring device 27.
- the otherwise usual second switch tamping cabin 28 can be omitted in the embodiment according to the invention.
- the switch component measuring system 3 for the location-dependent measurement of the position of switch components is arranged upstream of the lifting and straightening unit 2 in the working direction C.
- the lifting and straightening unit ( Fig. 2 ) has a roller tong 6, a roller tong lock cylinder 12 with a closing travel sensor 26, a lifting cylinder 5 with the lifting force F H , a hook depth cylinder 13 with a depth sensor 30 for the lifting hook, a switch component measuring system 3 with switch component detection sensors 15, a lifting hook 7 and a guide straightening wheel 14.
- the lifting and straightening unit 2 is guided along the rail 9 by means of wheels 14.
- FIG. 3 of the lifting and straightening unit 2 shows in particular the guide device 16 for the transverse displacement of the lifting hook 7, the lifting hook displacement cylinder 17 with displacement sensor 31, the guide and straightening wheel 14, the lifting cylinder 5 and the guide rail 9.
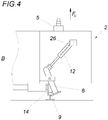
- the view according to Fig. 4 of the lifting and straightening unit 2 shows the roller tong 6, the roller tong locking cylinder 12 with the closing travel sensor 26, the lifting cylinder 5 with the lifting force F H , the guide rail 9 and the guide straightening wheel 14.
- Fig. 5 shows the schematic top view of a switch 22 to be straightened with the essential switch components, namely the tongue drives 18, the tongues 19, the guide rails 20, the frog 21, the wing rails 25, the continuous main strand 23, the sleepers 32, the intermediate compartments 33 and the branching line 24.
- the tongue area 19 is shown schematically.
- the obstacle position D is recorded
- K corresponds to the track position of the switch component measuring system 3 which, in the exemplary embodiment given, consists of individual switch component detection sensors 15.
- the switch component detection sensors 15 are arranged in two rows running next to one another, the individual sensors of adjacent sensor rows being staggered with gaps.
- 19 shows the tongue, 9 shows the continuous rail, E indicates the area in which the roller pliers 6 is used, F the position in which the lifting hook 7 must be used.
- C indicates the working direction.
- the vertical axis D shows the obstacle position and the horizontal axis K shows the track position at which the measuring device 3 was located at the time of the measurement.
- the crosses in the diagram indicate which of the distance sensors 15 has actively detected a switch component.
- M indicates the required free space from which the roller pliers 6 can be used.
- the frog area L is shown schematically.
- the obstacle position D is specified in the transverse direction
- K corresponds to the track position of the measuring device 3, which in the specified exemplary embodiment consists of individual distance sensors 15.
- E indicates the area in which the roller pliers 6 is used
- F the position in which the lifting hook 7 must be used.
- C indicates the working direction.
- the vertical axis D shows the obstacle position
- the horizontal axis K shows the track position at which the measuring device 3 was located at the time of the measurement.
- the crosses in the diagram indicate which of the distance sensors 15 has actively detected a switch component.
- M indicates the required free space from which the roller pliers 6 can be used.
- 21 represents the centerpiece and 25 the wing rails.
Landscapes
- Engineering & Computer Science (AREA)
- Architecture (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Machines For Laying And Maintaining Railways (AREA)
Description
Die Erfindung bezieht sich auf ein Verfahren zur Steuerung des Hebe-Richtaggregates einer gleisfahrbaren Weichenstopfmaschine zum Verdichten der Schotterbettung eines Gleises, insbesondere im Bereich einer Weiche, mit einem Stopfaggregat, mit einem Hebe-Richtaggregat das eine Rollzange, einen Rollzangenschließzylinder mit Schließwegsensor, einen Hebezylinder mit der Hebekraft, einen Hakentiefenzylinder mit Tiefengeber für einen Hebehaken und ein Führungs- Richtrad zum Führen des Hebe-Richtaggregates entlang einer Schiene aufweist, wobei die Lage von Weichenkomponenten, wie insbesondere Weichenantriebskästen, Schienen und Herzstück, während der Vorfahrt der Weichenstopfmaschine mit Hilfe einer dem Hebe-Richtaggregat in Arbeitsrichtung vorgeordneten Weichenkomponentenmessanlage in Gleisquerrichtung ortsabhängig gemessen und zwischengespeichert wird, und wobei die Lage der Schwellen und der Zwischenfächer in Arbeitsrichtung erfasst und zwischengespeichert wird. Zudem wird eine Vorrichtung zum Verdichten der Schotterbettung eines Gleises, insbesondere im Bereich einer Weiche, mit einer Weichenstopfmaschine, vorgeschlagen, die mit einem Stopfaggregat, mit einem Hebe-Richtaggregat das eine Rollzange, einen Rollzangenschließzylinder mit Schließwegsensor, einen Hebezylinder mit der Hebekraft, einen Hakentiefenzylinder mit Tiefengeber für einen Hebehaken und ein Führungs-Richtrad aufweist zum Richten der Gleislage und, mit einer dem Hebe-Richtaggregat in Arbeitsrichtung vorgeordneten Weichenkomponentenmessanlage zur ortsabhängigen Vermessung der Lage von Weichenkomponenten ausgestattet ist.The invention relates to a method for controlling the lifting and straightening unit of a track-traveling switch tamping machine for compacting the ballast bedding of a track, in particular in the area of a switch, with a tamping unit, with a lifting and straightening unit that includes a roller tong, a roller tong locking cylinder with a closing path sensor, a lifting cylinder the lifting force, a hook depth cylinder with depth sensor for a lifting hook and a guide-straightening wheel for guiding the lifting-straightening unit along a rail, the position of switch components, such as switch drive boxes, rails and frogs, during the advance of the switch tamping machine with the help of a lift -Righting unit in the working direction upstream switch component measuring system is measured and temporarily stored in the transverse direction of the track depending on location, and the position of the sleepers and the intermediate compartments in the working direction is recorded and temporarily stored. In addition, a device for compacting the ballast bedding of a track, in particular in the area of a switch, with a switch tamping machine is proposed, which has a tamping unit, a lifting and straightening unit, a roller tong, a roller tong locking cylinder with a closing travel sensor, a lifting cylinder with the lifting force, a hook depth cylinder with a depth transmitter for a lifting hook and a guide-straightening wheel for straightening the track position and is equipped with a switch component measuring system upstream of the lifting-straightening unit in the working direction for the location-dependent measurement of the position of switch components.
Eine derartige Vorrichtung ist aus der
Weichenstopfmaschinen sind Maschinen zur Berichtigung der Gleislage von Weichen. Zur Feststellung der Gleislage werden Messsysteme eingesetzt, welche die Gleishöhen-Istlage, die Gleisrichtungs-Istlage sowie die Überhöhungs-Istlage des Gleises während der Arbeit messen und mit vorgegebenen Sollwerten abgleichen. Mit Hilfe eines Gleishebe-/Gleisrichtaggregates wird der Gleisrost angehoben und seitlich ausgerichtet bis die Differenz zwischen vorgegebener Solllage und Istlage Null ist. In dieser Lage wird die Weiche durch Verdichten des Schotters unter den Schwellen mit Hilfe eines Weichenstopfaggregates festgelegt. Das Heben und Richten des Gleisrostes erfolgt dabei über hydraulische Hebe- und Richtzylinder mit Proportional- oder Servosteuerung. Weichen weisen als Besonderheit ein durchgehendes Gleis und ein abzweigendes Gleis auf. Züge werden über so genannte Zungen in den Abzweig geleitet oder auf dem durchgehenden Hauptstrang gehalten. Im Kreuzungspunkt des durchgehenden Gleisstranges und des abzweigenden Stranges liegt das so genannte Herzstück. Im Bereich des Herzstücks muss das Eisenbahnrad von der Schiene des durchgehenden Stranges auf die Schiene des abzweigenden Stranges geführt werden. Damit das im Unterbrechungsbereich ungeführte Rad sicher in den Abzweig oder in den durchgehenden Hauptstrang rollt sind Führungsschienen vorgesehen. Um Sicherzustellen, dass die Arbeitswerkzeuge der Weichenstopfmaschine die Weichenschwellen an allen Stellen unterstopfen können sind die Stopfaggregate seitlich verschiebbar und wegen der schrägliegenden Langschwellen sind die Stopfaggregate drehbar. Die Stopfpickel können zusätzlich zumindest zum Teil schwenkbar ausgeführt sein.Turnout tamping machines are machines for correcting the track position of turnouts. To determine the position of the track, measuring systems are used that measure the actual track height, the actual track direction and the actual cant position of the track during work and compare them with specified target values. With the help of a track lifting / leveling unit, the track grid is raised and laterally aligned until the difference between the specified target position and the actual position is zero. In this position, the switch is set by compressing the ballast under the sleepers with the help of a switch tamping unit. The track grid is lifted and straightened using hydraulic lifting and straightening cylinders with proportional or servo controls. Turnouts have a continuous track and a branching track as a special feature. Trains are led into the branch via so-called tongues or held on the continuous main line. The so-called centerpiece is located at the intersection of the continuous track and the branching track. In the area of the frog, the railway wheel must be guided from the rail of the continuous line to the rail of the branching line. Guide rails are provided so that the unguided wheel in the interruption area rolls safely into the branch or into the continuous main line. In order to ensure that the work tools of the turnout tamping machine can tamp under the turnout sleepers at all points, the tamping units can be moved sideways and, because of the sloping long sleepers, the tamping units can be rotated. The tamping tines can also be designed to be pivotable, at least in part.
Bei reinen Streckenstopfmaschinen wird die Schiene am Kopf mit Rollzangen erfasst und in die geometrische Soll-Lage gehoben. In Weichen ist eine Anwendung der Rollzange wegen der sich kreuzenden Schienen und im Herzstück oft nicht möglich. Damit auch diese Stellen bearbeitbar (einrichtbar) sind werden zusätzlich seitlich ausfahrbare und in der Tiefe höhenverstellbare verstellbare Hebehaken vorgesehen.With straight line tamping machines, the rail is gripped at the head with roller tongs and lifted into the geometrical target position. In turnouts, the roller tongs are often not used because of the crossing rails and in the centerpiece possible. So that these points can also be machined (set up), lifting hooks that can be extended laterally and are height-adjustable in depth are also provided.
Neben reinen Weichenstopfmaschinen und Streckenstopfmaschinen gibt es auch Universalmaschinen die sowohl für den Streckenbereich als auch für den Weichenbereich einsetzbar sind. Bei den Universalmaschinen werden häufig zwei Arbeitskabinen ausgeführt. Die Weichenstopfkabine liegt dabei bezüglich ihrer Sichtrichtung entgegen der Arbeitsrichtung. Von der Weichenstopfkabine aus steuert der Maschinenführer die Position des Stopfaggregates, der Pickel, er wählt je nach den Verhältnissen und Gutdünken die Rollenzange oder den Hebehaken bzw. die Position des Hebehakens sowie den Angriffspunkt desselben am Schienenkopf oder am Schienenfuß. Die Hebeeinrichtung kann auch in Gleislängsrichtung verschoben werden. Dies ist dann notwendig wenn der Hebehaken am Schienenfuß angreift - dies ist nur im Bereich des Zwischenfaches möglich - oder wenn durch einen Isolierstoß z.B. die Rollzange oder der Hebehaken nicht am Schienenkopf schließen kann. Die Weichenstopfkabine wird vor allem wegen der besseren Sicht auf das Hebe-Richtaggregat der Weichenstopfmaschine gewählt. Die Streckenstopfmaschine liegt von der Blickrichtung in Arbeitsrichtung. Beim Streckenstopfen wird nur mit der Rollzange gestopft weil keine Hindernisse wie bei Weichen auftreten. Beim Streckenstopfen, welches in der Regel mit höheren Arbeitsgeschwindigkeiten durchgeführt wird ist vor allem die Sicht auf die Stopfaggregate wichtig, damit diese exakt im Zwischenfach tauchen und nicht die Schwellen mit den Stopfwerkzeugen (so genannte Stopfpickel) beschädigen. Von der Streckenstopfkabine aus gibt es eine schlechte Sicht auf die Hebeeinrichtung weil die Stopfaggregate die Sicht einschränken. Der Nachteil der Ausführung von zwei Arbeitskabinen liegt im beträchtlichen Mehraufwand in der Ausführung, zwei Kabinen, zwei Steuereinrichtungen, Mehrgewicht und erhöhter Platzbedarf. Bisher wird bei der Ausführung einer Universalstopfmaschine mit nur einer Arbeitskabine (in der Regel jene für das Streckenstopfen) die Sicht auf die Hebeeinrichtung über Videokameras bewerkstelligt. Videokameras können aber eine räumliche Sicht nur ungenügend ersetzen. Die manuelle Einstellung der Hebeeinrichtung, die Wahl Rollenzange oder Hebehaken, die Positionierung des Hebehakens und des Kraftangriffspunkts, sowie die Verschiebung der Hebeeinrichtung in Gleislängsrichtung erfordert Zeit. Bekannt sind auch Wegmesseinrichtungen über Odometer oder andere Verfahren. Da die Gleissollgeometrie bezüglich der Bogenlänge des Gleises definiert ist, muss die aktuelle Position der Maschine bezüglich der Kilometrierung des Gleises erfasst werden.In addition to pure turnout tamping machines and track tamping machines, there are also universal machines that can be used both for track and turnout areas. The universal machines often have two work cabins. The switch tamping cabin is opposite to the working direction with regard to its viewing direction. From the switch tamping cabin, the machine operator controls the position of the tamping unit, the pick, he selects the roller tongs or the lifting hook or the position of the lifting hook as well as the point of application of the same on the rail head or on the rail foot, depending on the circumstances and discretion. The lifting device can also be moved in the longitudinal direction of the track. This is necessary if the lifting hook engages the rail foot - this is only possible in the area of the intermediate compartment - or if, for example, the roller clamp or the lifting hook cannot close on the rail head due to an insulating joint. The turnout tamping cabin is chosen primarily because of the better view of the lifting and straightening unit of the turnout tamping machine. The line tamping machine is in the working direction from the viewing direction. When tamping the section, tamping is only carried out with the roller tongs because there are no obstacles as with switches. With track tamping, which is usually carried out at higher working speeds, it is particularly important to have a view of the tamping units so that they dip exactly in the intermediate compartment and do not damage the sleepers with the tamping tools (so-called tamping tools). From the section tamping cabin there is a poor view of the lifting device because the tamping units restrict the view. The disadvantage of the design of two work cabins is the considerable additional effort in the design, two cabins, two control devices, additional weight and increased space requirements. Up until now, when a universal tamping machine was designed with only one work booth (usually the one for tamping in the path), the view of the lifting device was achieved via video cameras. However, video cameras cannot adequately replace a spatial view. The manual setting of the lifting device, the choice of roller tongs or lifting hook, the positioning of the lifting hook and the Force application point, as well as the displacement of the lifting device in the longitudinal direction of the track requires time. Distance measuring devices using odometers or other methods are also known. Since the target track geometry is defined in terms of the curved length of the track, the current position of the machine in terms of the track kilometrage must be recorded.
Der Erfindung liegt somit die Aufgabe zugrunde, ein Verfahren zur automatischen Steuerung der Rollzange sowie des Hebehakens zum Anheben von Weichen durch Weichenstopfmaschinen anzugeben, mit dem die Arbeitsgeschwindigkeit erhöht und die Fehleranfälligkeit minimiert werden kann. Zudem mit nur einer Arbeitskabine das Auslangen gefunden werden, womit die Weichenstopfmaschine gegebenenfalls kürzer bauen kann.The invention is therefore based on the object of specifying a method for automatically controlling the roller tongs and the lifting hook for lifting switches by switch tamping machines, with which the operating speed can be increased and the susceptibility to errors can be minimized. In addition, suffice it with just one work cabin, which means that the switch tamping machine can be made shorter if necessary.
Die Erfindung löst die gestellte Aufgabe dadurch, dass das Hebe-Richtaggregat in Maschinenlängsrichtung längsverschiebbar geführt ist und die Weichenkomponentenmessanlage mit Weichenkomponentenerfassungssensoren aufweist, dass die erfassten Werte für die Arbeitsposition der Rollzange und des Hebehakens abgefragt werden, dass auf der Basis dieser Werte eine Prüfung dahingehend erfolgt ob an diese Arbeitsposition die Rollzange einsetzbar ist und, wenn die Rollzange nicht einsetzbar ist, eine Prüfung auf der Basis dieser Werte dahingehend erfolgt ob der Hebehaken am Schienenkopf angreifen kann und wenn dies wiederum nicht möglich ist, dass gegebenenfalls eine Verlagerung des Hebehakens in Maschinenlängsrichtung derart erfolgt, dass der Hebehaken am Schienenfuß bei einem Zwischenfach zu stehen kommt und dass die Hebung nach einem Greifen der Schiene mit dem Hebe-Richtaggregat durchgeführt wird, wobei aus der mit der Weichenkomponentenmessanlage erfassten Lage der Weichenkomponenten eine Greifposition für das Hebe-Richtaggregat ermittelt und diese Greifposition vor einem Schließen der Rollzange oder vor einem Greifen der Schiene mit dem Hebehaken, insbesondere durch Querverschiebung, Längsverschiebung und Tiefenverstellung des Hebe-Richtaggregates, automatisch angefahren wid.The invention solves the problem in that the lifting and straightening unit is guided in a longitudinally displaceable manner in the machine's longitudinal direction and the switch component measuring system has switch component detection sensors that the recorded values for the working position of the roller tongs and the lifting hook are queried so that a test is carried out on the basis of these values Whether the roller tongs can be used in this working position and, if the roller tongs cannot be used, a check is carried out on the basis of these values to determine whether the lifting hook can grip the rail head and, if this is not possible, that the lifting hook may be shifted in the longitudinal direction of the machine takes place that the lifting hook comes to stand on the rail foot in an intermediate compartment and that the lifting is carried out after gripping the rail with the lifting and straightening unit, with a Gr eifposition determined for the lifting and straightening unit and this gripping position is automatically approached before closing the roller tongs or before gripping the rail with the lifting hook, in particular by transverse displacement, longitudinal displacement and depth adjustment of the lifting and straightening unit.
Erfindungsgemäß wird die Position der Weichenkomponenten mit der dem Hebe-Richtaggregat in Arbeitsrichtung vorgeordneten Weichenkomponentenmessanlage erfasst und wegabhängig gespeichert. Es werden somit eine beliebige Anzahl an praktisch eindimensionalen Momentaufnahmen des Gleisquerschnittes in Draufsicht gemacht und in einer Datenbank abgelegt. Aus den abgelegten Daten lässt sich ein digitales Abbild des Gleises und hier insbesondere der Weichenkomponenten erstellen. Ausgehend davon wird das Hebe- Richtaggregat gegebenenfalls in Gleislängsrichtung entlang einer Führung am Maschinenrahmen automatisch entsprechend verlagert um einen geeigneten Angriffspunkt für das Hebe- Richtwerkzeug anzufahren. Zudem wird das geeignete Hebe- Richtwerkzeug in Abhängigkeit der Messwerte der Weichenkomponentenmessanlage ausgewählt, es wird also zwischen Rollenzange und Hebehaken gewählt und die Ausfahrposition des Hebehakens sowie der Angriffspunkt des Hebehakens, an Schienenfuß oder Schienenkopf, von einer Steuerung bzw. Regelung automatisch ausgewählt. Infolge dieser Maßnahmen kann eine der beiden Arbeitskabinen entfallen. Die automatische Steuerung von Rollzange und Hebehaken kompensiert die verschlechterte Sicht auf Rollzange und Hebehaken von der Streckenstopfkabine aus und erhöht die Arbeitsgeschwindigkeit. Zur Überwachung von Rollzange und Hebehaken kann zudem ein Videosystem zum Einsatz kommen.According to the invention, the position of the switch components is detected with the switch component measuring system arranged upstream of the lifting and straightening unit in the working direction and stored as a function of the path. Any number of practically one-dimensional snapshots of the track cross-section can be made in plan view and stored in a database. A digital image of the track and, in particular, the switch components can be created from the stored data. On the basis of this, the lifting and straightening unit is automatically shifted accordingly in the longitudinal direction of the track along a guide on the machine frame in order to approach a suitable point of application for the lifting and straightening tool. In addition, the suitable lifting and straightening tool is selected depending on the measured values of the switch component measuring system, i.e. between roller tongs and lifting hook and the extension position of the lifting hook and the point of application of the lifting hook, on the rail base or rail head, is automatically selected by a control or regulation. As a result of these measures, one of the two work cabins can be omitted. The automatic control of the roller clamp and lifting hook compensates for the deteriorated view of the roller clamp and lifting hook from the track tamping cabin and increases the working speed. A video system can also be used to monitor the roller tongs and lifting hooks.
Erfindungsgemäß wird die Position der Gleiskomponenten, insbesondere der Weichenkomponenten (Lage der Schienen, des Herzstücks, der Flügelschienen, der Weichenzungen, der Antriebskästen für die Weichenzungen etc.) bezüglich des Hebe-Richtaggregates in Arbeitsrichtung wegabhängig vorlaufend erfasst. Die Erfassung dieser Komponenten aus Stahl kann z.B. mit Hilfe einer Reihe von induktiven oder kapazitiven Näherungssensoren, Ultraschallsensoren oder einem Laserscanner (äquidistantes scannen z.B. alle 5 cm) bewerkstelligt werden. Die Position der Weichenkomponenten wird wegabhängig gespeichert und von einer Rechenanlage ortsversetzt an die Position der Rollzange oder des Hebehakens transponiert. Der Wegfortschritt der Maschine wird dabei über ein Wegmessgerät, beispielsweise ein Odometer, gemessen. Für die jeweilige Position des Hebe-Richtaggregates werden die vorhergehenden Messungen ausgewertet. Wird kein ausreichender Platz zum Manipulieren mit der Rollzange festgestellt dann wird automatisch auf den Hebehaken umgeschaltet. Abhängig von der vorlaufenden Messung und den zwischengespeicherten Daten für den aktuellen Ort des Hebe-Richtaggregates wird die Ausfahrposition des Hebehakens und als Angriffspunkt zuerst der Schienenkopf gewählt. Über die Messung der Ausfahrposition und dem Schließweg des Hebehakens kann geschlossen werden, ob der Kopf durch den Haken sicher ergriffen wurde oder nicht. Genügt der Schließweg nicht dann wird der Haken automatisch wieder geöffnet. Befindet sich der Hebehaken nicht über dem Zwischenfach, dann wird das Hebe-Richtaggregat in Längsrichtung des Gleises verschoben bis dass der Hebehaken sich über dem Zwischenfach befindet. An dieser neuen Position erfolgt der Versuch am Schienenkopf erneut zu schließen neuerdings, ist dieser nicht erfolgreich (weil z.B. ein Isolierstoß vorliegt), dann wird der Schienenfuß als Kraftangriffspunkt gewählt. Greift die Rollzange den Schienenkopf nicht erfolgreich, dies ist über die Wegmessung des hydraulischen Schließzylinders feststellbar, dann wird das Hebe-Richtaggregat in eine Position in Gleislängsrichtung verfahren bei der ein Schließen möglich ist. Sollte sich keine solche Position ergeben, dann wird automatisch der Hebehaken mit Angriffspunkt am Schienenfuß angesteuert. Die Messeinrichtung erfasst auf der Seite der Hebeeinrichtungen (immer außen an der Schiene) die Position der Weichenkomponenten in Gleisquerrichtung, als Bezugspunkt gilt jener Schienenstrang auf der die Weichenstopfmaschine und die Hebe-Richt-Einrichtung fährt. Aus der mit der Weichenkomponentenmessanlage erfassten Lage der Weichenkomponenten wird eine Greifposition für die Hebe-Richtanlage ermittelt und diese Greifposition vor einem Schließen der Rollzange oder vor einem Greifen der Schiene mit dem Hebehaken, insbesondere durch Querverschiebung, Längsverschiebung und Tiefenverstellung der Hebe-Richtanlage, automatisch angefahren.According to the invention, the position of the track components, in particular the switch components (position of the rails, the frog, the wing rails, the switch blades, the drive boxes for the switch blades, etc.) with respect to the lifting and straightening unit in the working direction is recorded in advance depending on the path. The detection of these steel components can be done, for example, with the help of a series of inductive or capacitive proximity sensors, ultrasonic sensors or a laser scanner (equidistant scanning, for example, every 5 cm). The position of the switch components is stored as a function of the path and transposed by a computer system to the position of the roller tongs or the lifting hook. The path progress of the machine is measured using a path measuring device, for example an odometer. The previous measurements are evaluated for the respective position of the lifting and straightening unit. If there is not enough space to manipulate with the roller pliers, then it is determined automatically switched to the lifting hook. Depending on the previous measurement and the temporarily stored data for the current location of the lifting and straightening unit, the extension position of the lifting hook and the rail head as the point of application are selected first. By measuring the extended position and the closing path of the lifting hook, it can be concluded whether the head has been securely gripped by the hook or not. If the closing path is not sufficient, the hook is automatically opened again. If the lifting hook is not located above the intermediate compartment, the lifting and straightening unit is moved in the longitudinal direction of the track until the lifting hook is located above the intermediate compartment. At this new position the attempt is made to close the rail head again. If this is unsuccessful (e.g. because there is an insulating joint), the rail foot is selected as the point of application of force. If the roller tong does not grip the rail head successfully, this can be determined by measuring the displacement of the hydraulic locking cylinder, then the lifting and straightening unit is moved to a position in the longitudinal direction of the track where it can be closed. If there is no such position, the lifting hook with the point of application on the rail foot is automatically activated. On the side of the lifting devices (always on the outside of the rail), the measuring device records the position of the turnout components in the transverse direction of the track; the reference point is the rail track on which the turnout tamping machine and the lifting and straightening device are running. A gripping position for the lifting / straightening system is determined from the position of the switch components recorded with the switch component measuring system and this gripping position is automatically approached before closing the roller tongs or before gripping the rail with the lifting hook, in particular by transverse displacement, longitudinal displacement and depth adjustment of the lifting and straightening system .
Die Weichenkomponentenmessanlage erfasst die Lage der Weichenkomponenten vorzugsweise mit einer, eine Vielzahl an Einzelsensoren umfassenden, Sensorleiste, welche Sensorleiste quer zur Maschinenlängsrichtung verlaufend des Hebe-Richtaggregates in Arbeitsrichtung vorgeordnet ist und mit einer Reihe von Induktivsensoren und/oder Kapazitivsensoren und/oder Laserdistanzsensoren und/oder Ultraschalldistanzsensoren ausgestattet ist. Ebenso kann die Weichenkomponentenmessanlage die Lage der Weichenkomponenten mit wenigstens einem Laserscanner erfassen.The switch component measuring system detects the position of the switch components preferably with a sensor strip comprising a large number of individual sensors, which sensor strip is arranged upstream of the lifting and straightening unit running transversely to the machine longitudinal direction and with a number of inductive sensors and / or capacitive sensors and / or laser distance sensors and / or Ultrasonic distance sensors is equipped. The switch component measuring system can also record the position of the switch components with at least one laser scanner.
Eine erfindungsgemäße Vorrichtung zum Verdichten der Schotterbettung eines Gleises, insbesondere im Bereich einer Weiche, mit einer Weichenstopfmaschine, mit einem Stopfaggregat, mit einem Hebe-Richtaggregat das eine Rollzange, einen Rollzangenschließzylinder mit Schließwegsensor, einen Hebezylinder mit der Hebekraft, einen Hakentiefenzylinder mit Tiefengeber für einen Hebehaken und ein Führungs- Richtrad zum Führen des Hebe-Richtaggregates entlang einer Schiene aufweist, zum Richten der Gleislage, und mit einer dem Hebe-Richtaggregat in Arbeitsrichtung vorgeordneten Weichenkomponentenmessanlage zur ortsabhängigen Vermessung der Lage von Weichenkomponenten in Gleisquerrichtung, zeichnet sich dadurch aus, dass das Hebe-Richtaggregat in Maschinenlängsrichtung längsverschiebbar am Maschinenrahmen geführt ist und die Weichenkomponentenmessanlage mit Weichenkomponentenerfassungssensoren aufweist, dass die Weichenkomponentenmessanlage die Lage von Weichenkomponenten ortsabhängig messen und zwischenspeichern kann und die Lage der Schwellen und der Zwischenfächer in Arbeitsrichtung erfasst und zwischengespeichert werden kann und dass die die erfassten Werte für die Arbeitsposition der Rollzange und des Hebehakens abfragbar sind, dass auf der Basis dieser Werte eine Prüfung dahingehend erfolgen kann, ob an dieser Arbeitsposition die Rollzange einsetzbar ist und, wenn die Rollzange nicht einsetzbar ist, eine Prüfung auf der Basis dieser Werte dahingehend erfolgen kann, ob der Hebehaken am Schienenkopf angreifen kann und wenn dies wiederum nicht möglich ist, dass gegebenenfalls eine Verlagerung des Hebehakens in Maschinenlängsrichtung derart erfolgen kann, dass der Hebehaken am Schienenfuß bei einem Zwischenfach zu stehen kommt und dass die Hebung nach einem Greifen der Schiene mit dem Hebe-Richtaggregat durchgeführt werden kann, wobei aus der mit der Weichenkomponentenmessanlage erfassten Lage der Weichenkomponenten eine Greifposition für das Hebe-Richtaggregat ermittelt und diese Greifposition vor einem Schließen der Rollzange oder vor einem Greifen der Schiene mit dem Hebehaken, insbesondere durch Querverschiebung, Längsverschiebung und Tiefenverstellung des Hebe-Richtaggregates, automatisch angefahren werden kann.A device according to the invention for compacting the ballast bedding of a track, in particular in the area of a switch, with a switch tamping machine, with a tamping unit, with a lifting and straightening unit that includes a roller tong, a roller tong locking cylinder with a closing travel sensor, a lifting cylinder with the lifting force, a hook depth cylinder with a depth sensor for one Has lifting hook and a guide-straightening wheel for guiding the lifting-straightening unit along a rail, for straightening the track position, and with a switch component measuring system upstream of the lifting-straightening unit in the working direction for the location-dependent measurement of the position of switch components in the transverse direction of the track, is characterized by the fact that the Lifting-straightening unit is guided longitudinally displaceably on the machine frame in the longitudinal direction of the machine and has the switch component measuring system with switch component detection sensors that the switch component measuring system measure the position of switch components depending on location and z can be temporarily stored and the position of the thresholds and the intermediate compartments in the working direction can be recorded and temporarily stored and that the recorded values for the working position of the roller tongs and the lifting hook can be queried so that a check can be made on the basis of these values to determine whether this working position can be carried out the roller tongs can be used and, if the roller tongs cannot be used, a test can be carried out on the basis of these values to determine whether the lifting hook can grip the rail head and, if this is not possible, the lifting hook can be shifted in the longitudinal direction of the machine that the lifting hook comes to rest on the rail foot at an intermediate compartment and that the lifting can be carried out after gripping the rail with the lifting and straightening unit, a gripping position for the lifting and straightening unit being determined from the position of the switch components recorded with the switch component measuring system and this gripping position can be automatically approached before closing the roller tongs or before gripping the rail with the lifting hook, in particular by transverse displacement, longitudinal displacement and depth adjustment of the lifting and straightening unit.
Um dabei sicherzustellen, dass einzelnen Positionen sicher angefahren wurden, bzw. die Schiene sicher gegriffen wurde , ist dem Hebehaken des Hebe-Richtaggragates der Hakentiefenzylinder mit Tiefengeber zugeordnet , kann der Rollzange des Hebe-Richtaggregates der Rollzangenschließzylinder mit Schließwegsensor zugeordnet sein und kann dem Hebe-Richtaggregat ein Querverschiebezylinder mit Verschiebewegsensor zugeordnet sein.In order to ensure that individual positions have been safely approached or the rail has been securely gripped, the hook depth cylinder with depth sensor is assigned to the lifting hook of the lifting and straightening unit, the roller tongs of the lifting and straightening unit can be assigned to the roller tong locking cylinder with closing travel sensor and can be assigned to the lifting A transverse shift cylinder with a displacement sensor can be assigned to the straightening unit.
Eine besonders einfache und robuste Weichenkomponentenmessanlage ergibt sich, wenn diese eine, vorzugsweise eine Vielzahl an Einzelsensoren umfassende, Sensorleiste umfasst, die quer zur Maschinenlängsrichtung ausgerichtet an der Weichenstopfmaschine vorgesehen ist. Dazu kann die Sensorleiste eine Vielzahl an in Leistenlängsrichtung hintereinander, also in einer Reihe, angeordnete Einzelsensoren umfassen. Nach einer vorteilhaften Ausgestaltungsform der Erfindung empfiehlt es sich, wenn die in Leistenlängsrichtung hintereinander angeordneten Einzelsensoren in zwei oder mehr nebeneinander verlaufenden Reihen angeordnet sind, wobei die Einzelsensoren benachbarter Sensorreihen vorzugsweise auf Lücke versetzt sind. Die Weichenkomponentenmessanlage kann Induktivsensoren, Kapazitivsensoren, Laserdistanzsensoren und/oder Ultraschalldistanzsensoren bzw. gegebenenfalls wenigstens einen Laserscanner umfassen.A particularly simple and robust switch component measuring system is obtained when it comprises a sensor strip, preferably comprising a plurality of individual sensors, which is provided on the switch tamping machine, aligned transversely to the longitudinal direction of the machine. For this purpose, the sensor strip can comprise a multiplicity of individual sensors arranged one behind the other in the longitudinal direction of the strip, that is to say in a row. According to an advantageous embodiment of the invention, it is advisable if the individual sensors arranged one behind the other in the longitudinal direction of the bar are arranged in two or more rows running next to one another, the individual sensors of adjacent sensor rows preferably being offset with gaps. The switch component measuring system can include inductive sensors, capacitive sensors, laser distance sensors and / or ultrasonic distance sensors or, if appropriate, at least one laser scanner.
In der Zeichnung ist der Erfindungsgegenstand beispielsweise dargestellt. Es zeigen
- Fig. 1
- eine gleisfahrbare Gleisstopfmaschine in Seitenansicht,
- Fig. 2
- ein erfindungsgemäßes Hebe-Richtaggragat mit Rollenzange und quer verfahrbaren und tiefenverstellbaren Hebehaken sowie einer Messeinrichtung zur Erfassung der Gleiskomponenten in Seitenansicht,
- Fig. 3
- ein Hebe-Richtaggregat mit Darstellung des quer verfahrbaren und tiefenverstellbaren Hebehakens mit Wegerfassung der Zylinderbewegungen in Ansicht,
- Fig. 4
- eine Rollenzange mit Wegerfassung der Schließbewegung in Ansicht,
- Fig. 5
- eine Weiche mit Weichenkomponenten wie Zungen, Zungenantrieb, Herzstück, Flügelschienen und Führungsschienen, sowie der Langschwellen, den durchgehenden und den abzweigenden Strang in Draufsicht und
- Fig. 6 und 7
- je eine Darstellung des Zungenbereichs von Weichen, die Messeinrichtung zur Erfassung der Lage der Gleiskomponenten in Gleisquerrichtung und exemplarisch die gespeicherten Messdaten einer derartigen Messeinrichtung.
- Fig. 1
- a side view of a track tamping machine that can be driven on rails,
- Fig. 2
- a lifting and straightening assembly according to the invention with roller tongs and transversely movable and depth-adjustable lifting hooks as well as a measuring device for detecting the track components in a side view,
- Fig. 3
- a lifting and straightening unit with a view of the transversely movable and depth-adjustable lifting hook with distance recording of the cylinder movements,
- Fig. 4
- a roller tong with position detection of the closing movement in view,
- Fig. 5
- a switch with switch components such as tongues, tongue drive, frog, wing rails and guide rails, as well as the long sleepers, the continuous and branching line in plan view and
- Figures 6 and 7
- One representation each of the tongue area of points, the measuring device for detecting the position of the track components in the transverse direction of the track and, as an example, the stored measurement data of such a measuring device.
Eine Weichenstopfmaschine 1 weist ein Stopfaggregat 4 und ein Gleishebe-/ Richtaggregat 2 mit einem Hebezylinder 5, einer Rollzange 6 einen Hebehaken 7 und eine Messeinrichtung 3 auf (
Das Hebe-Richtaggregat (
Die Ansicht gemäß
Die Ansicht gemäß
Im oberen Teil der
Im oberen Teil von
Claims (12)
- Method for controlling the lifting and lining unit of a switch tamping machine (1), which can be driven on a track (8), for compacting the ballast bed of a track, in particular in the region of a switch, comprising a tamping unit (4), a lifting and lining unit (2) which comprises a pair of roller pincers (6), a lifting hook (7), a roller pincer closing cylinder (12) with a closing path sensor (26), a lifting cylinder (5) with a lifting force (FH), a hook depth cylinder (13) with a depth transducer (30) for the lifting hook (7) and a guiding and lining wheel (14) for guiding the lifting and lining unit (2) along a rail (9), wherein the position of switch components, such as in particular switch drive boxes (18), rails (9) and a frog (21), is measured and intermediately stored, during advancement of the switch tamping machine (1), in a location-dependent manner in a transverse direction of the track with the aid of a switch component measuring system (3) which is arranged upstream of the lifting and lining unit (2) in the working direction (C), and wherein the position of the sleepers (32) and of the intermediate compartments (33) in the working direction (C) is detected and intermediately stored, characterised in that the lifting and lining unit (2) is guided in a longitudinally displaceable manner (11) in the longitudinal direction of the machine and comprises the switch component measuring system (3) having switch component detection sensors (15), in that the detected values for the working position of the pair of roller pincers (6) and of the lifting hook (7) are queried, in that on the basis of these values a check is carried out to establish whether the pair of roller pincers (6) can be used (J, M) at this working position and, if the pair of roller pincers (6) cannot be used (J, M), a check is carried out on the basis of these values to establish whether the lifting hook (7) can act upon the rail head and if, in turn, this is not possible, optionally the lifting hook (7) is displaced in the longitudinal direction of the machine such that the lifting hook (7) comes to a standstill at the rail base by an intermediate compartment (33), and the lifting is performed after gripping of the rail by means of the lifting and lining unit (2), wherein from the position of the switch components (D, K) detected by means of the switch component measuring system (3) a gripping position for the lifting and lining unit (2) is determined and this gripping position is automatically accessed, prior to closure of the pair of roller pincers or prior to gripping of the rail by means of the lifting hook (7), in particular by means of transverse displacement, longitudinal displacement and depth adjustment of the lifting and lining unit (2).
- Method as claimed in claim 1, characterised in that the switch component measuring system (3) detects the position of the switch components by means of a sensor strip which comprises preferably a plurality of switch component detection sensors (15) and is arranged, extending transversely to the longitudinal direction of the machine, upstream of the lifting and lining unit in the working direction (C).
- Method as claimed in claim 1 or 2, characterised in that the switch component measuring system (3) detects the position of the switch components by means of a row of inductive sensors (15) and/or capacitive sensors (15).
- Method as claimed in any one of claims 1 or 2, characterised in that the switch component measuring system (3) detects the position of the switch components by means of a row of laser distance sensors (15) and/or ultrasonic distance sensors (15).
- Method as claimed in any one of claims 1 or 2, characterised in that the switch component measuring system (3) detects the position of the switch components by means of at least one laser scanner.
- Apparatus for compacting the ballast bed of a track, in particular in the region of a switch, comprising a switch tamping machine (1), comprising a tamping unit (4), a lifting and lining unit (2) which comprises a pair of roller pincers (6), a lifting hook (7), a roller pincer closing cylinder (12) with a closing path sensor (26), a lifting cylinder (5) with a lifting force (FH), a hook depth cylinder (13) with a depth transducer (30) for the lifting hook (7) and a guiding and lining wheel (14) for guiding the lifting and lining unit (2) along a rail, for lining the track position, and comprising a switch component measuring system (3), which is arranged upstream of the lifting and lining unit (2) in the working direction (C), for measuring the position of the switch components in a location-dependent manner in a transverse direction of the track, characterised in that the lifting and lining unit (2) is guided on the machine frame in a longitudinally displaceable manner in the longitudinal direction of the machine and comprises the switch component measuring system (3) having switch component detection sensors (15), in that the switch component measuring system (3) can measure and intermediately store the position of switch components in a location-dependent manner and the position of the sleepers (32) and of the intermediate compartments (33) in the working direction (C) can be detected and intermediately stored, and in that the detected values for the working position of the pair of roller pincers (6) and of the lifting hook (7) can be queried, in that on the basis of these values a check can be carried out to establish whether the pair of roller pincers (6) can be used (J, M) at this working position and, if the pair of roller pincers (6) cannot be used (J, M), a check can be carried out on the basis of these values to establish whether the lifting hook (7) can act upon the rail head and if, in turn, this is not possible, optionally the lifting hook (7) can be displaced in the longitudinal direction of the machine such that the lifting hook (7) comes to a standstill at the rail base by an intermediate compartment (33), and the lifting can be performed after gripping of the rail by means of the lifting and lining unit (2), wherein from the position of the switch components (D, K) detected by means of the switch component measuring system (3) a gripping position for the lifting and lining unit (2) can be determined and this gripping position can be automatically accessed, prior to closure of the pair of roller pincers or prior to gripping of the rail by means of the lifting hook (7), in particular by means of transverse displacement, longitudinal displacement and depth adjustment of the lifting and lining unit (2).
- Apparatus as claimed in claim 6, characterised in that the pair of roller pincers (6) of the lifting and lining unit (2) is associated with the roller pincer closing cylinder (12) having a closing path sensor (26).
- Apparatus as claimed in any one of claims 6 or 7, characterised in that the lifting and lining unit (2) is associated with a transverse displacement cylinder (17) having a displacement path sensor (31).
- Apparatus as claimed in any one of claims 6 to 8, characterised in that the switch component measuring system (3) which is arranged upstream of the lifting and lining unit (2) in the working direction (C) comprises a sensor strip which comprises preferably a plurality of individual sensors and is provided on the switch tamping machine (1) oriented transversely to the longitudinal direction of the machine.
- Apparatus as claimed in claim 9, characterised in that the sensor strip (3) comprises a plurality of individual sensors (15) arranged one behind the other in the longitudinal direction of the strip.
- Apparatus as claimed in claim 10, characterised in that the individual sensors (15) arranged one behind the other in the longitudinal direction of the strip are arranged in two or more rows extending next to one another, wherein optionally the individual sensors of adjacent sensor rows are offset preferably with a gap.
- Apparatus as claimed in any one of claims 6 to 8, characterised in that the switch component measuring system (3) comprises inductive sensors, capacitive sensors, laser distance sensors and/or ultrasonic distance sensors or optionally at least one laser scanner.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| ATA50862/2014A AT516590B1 (en) | 2014-11-28 | 2014-11-28 | Method and device for compacting the ballast bed of a track |
| PCT/AT2015/050301 WO2016081971A1 (en) | 2014-11-28 | 2015-11-26 | Method and device for compacting the ballast bed of a track |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3224416A1 EP3224416A1 (en) | 2017-10-04 |
| EP3224416B1 true EP3224416B1 (en) | 2021-03-10 |
Family
ID=54848358
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP15808080.4A Active EP3224416B1 (en) | 2014-11-28 | 2015-11-26 | Method and device for compacting the ballast bed of a track |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US10550525B2 (en) |
| EP (1) | EP3224416B1 (en) |
| CN (1) | CN107208383A (en) |
| AT (1) | AT516590B1 (en) |
| AU (1) | AU2015354375A1 (en) |
| CA (1) | CA2968590A1 (en) |
| RU (1) | RU2674726C1 (en) |
| WO (1) | WO2016081971A1 (en) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AT516590B1 (en) * | 2014-11-28 | 2017-01-15 | System 7 - Railsupport GmbH | Method and device for compacting the ballast bed of a track |
| EP3390723B1 (en) * | 2015-12-17 | 2020-02-05 | Siemens Mobility Pty Ltd. | Railway track displacement measurement system and method for proactive maintenance |
| AT519739B1 (en) * | 2017-05-12 | 2018-10-15 | Plasser & Theurer Export Von Bahnbaumaschinen Gmbh | Method for controlling a track-laying machine |
| AT520824B1 (en) | 2018-05-24 | 2019-08-15 | Plasser & Theurer Export Von Bahnbaumaschinen Gmbh | Method and machine for submerging a track in the area of a switch |
| AT521263B1 (en) * | 2018-08-20 | 2019-12-15 | Hp3 Real Gmbh | Individual troubleshooting procedure |
| AT521990B1 (en) * | 2018-12-27 | 2022-07-15 | Plasser & Theurer Export Von Bahnbaumaschinen Gmbh | Method and track-laying machine for processing a ballasted track |
| AT17436U1 (en) | 2020-12-02 | 2022-04-15 | Hp3 Real Gmbh | Method for the automatic autonomous control of a tamping machine |
| CN112647368B (en) * | 2020-12-21 | 2023-01-13 | 湖州生力液压有限公司 | Use method of portable and angle-adjustable hydraulic tamping machine |
| AT525706B1 (en) * | 2021-11-22 | 2024-05-15 | Plasser & Theurer Export Von Bahnbaumaschinen Gmbh | Method for operating a tamping machine |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CH536901A (en) * | 1971-12-03 | 1973-05-15 | Matisa Materiel Ind Sa | Device for both vertical and lateral movement of a section of railway |
| AT356165B (en) * | 1978-05-11 | 1980-04-10 | Plasser Bahnbaumasch Franz | TRACKING MACHINE WITH TRACK LIFTING AND SIDE DIRECTIONAL DEVICE, ESPECIALLY FOR SWITCH AREAS |
| SU1116108A1 (en) * | 1983-06-15 | 1984-09-30 | Всесоюзный Ордена Трудового Красного Знамени Научно-Исследовательский Институт Железнодорожного Транспорта | Apparatus for controlling the straightening of railway track |
| AT387607B (en) * | 1987-07-08 | 1989-02-27 | Plasser Bahnbaumasch Franz | DRIVABLE TRACK, LIFTING AND LEVELING MACHINE FOR THE SWITCHING AND CROSSING AREA |
| AT391903B (en) * | 1989-01-26 | 1990-12-27 | Plasser Bahnbaumasch Franz | DRIVABLE TRACK MACHINE WITH A DEVICE FOR CONTROLLING THE WORKING POSITION OF YOUR WORKING AGGREGATE OR. -TOOLS |
| DE59201879D1 (en) * | 1991-06-12 | 1995-05-18 | Plasser Bahnbaumasch Franz | Method and tamping machine for compacting the ballast of a track. |
| CZ285403B6 (en) * | 1995-03-16 | 1999-08-11 | Franz Plasser Bahnbaumaschinen-Industriegesellschaft M. B. H. | Track-building machine |
| CN2340801Y (en) * | 1997-12-24 | 1999-09-29 | 铁道部株洲电力机车研究所 | Automatic spreading, leveling and vibrating vehicle |
| AT5768U3 (en) * | 2002-07-29 | 2003-09-25 | Plasser Bahnbaumasch Franz | tamping machine |
| AT5839U3 (en) * | 2002-09-25 | 2003-09-25 | Plasser Bahnbaumasch Franz | MACHINE AND METHOD FOR PLUGGING THRESHOLD A TRACK |
| CN2761675Y (en) * | 2005-01-14 | 2006-03-01 | 林凤君 | Automatic sensing type hydraulic rail dogging device of switch tamping machine |
| US20100064928A1 (en) * | 2006-12-11 | 2010-03-18 | Franz Plasser Bahnbaumaschinen- Industriegesellschaft M.B.H. | Tamping unit for tamping a track |
| AT508755B1 (en) * | 2010-03-01 | 2011-04-15 | Plasser Bahnbaumasch Franz | STOP MACHINE WITH A SUPPLEMENTARY EQUIPMENT |
| AT509461B1 (en) * | 2010-09-27 | 2011-09-15 | Plasser Bahnbaumasch Franz | tamping machine |
| EP2902546B2 (en) * | 2014-01-30 | 2020-09-02 | HP3 Real GmbH | Device for the compaction of railway ballast |
| AT516590B1 (en) * | 2014-11-28 | 2017-01-15 | System 7 - Railsupport GmbH | Method and device for compacting the ballast bed of a track |
| AT516671B1 (en) * | 2014-12-22 | 2017-01-15 | System 7 - Railsupport GmbH | Tamping unit for a tamping machine |
| AT516827B1 (en) * | 2015-06-02 | 2016-09-15 | System 7 - Railsupport GmbH | Tamping machine for compacting the ballast bed of a track |
| AT518023B1 (en) * | 2015-12-02 | 2018-04-15 | Plasser & Theurer Export Von Bahnbaumaschinen Gmbh | Tamping machine and method for performing a position correction of a track |
-
2014
- 2014-11-28 AT ATA50862/2014A patent/AT516590B1/en active
-
2015
- 2015-11-26 WO PCT/AT2015/050301 patent/WO2016081971A1/en active Application Filing
- 2015-11-26 AU AU2015354375A patent/AU2015354375A1/en not_active Abandoned
- 2015-11-26 EP EP15808080.4A patent/EP3224416B1/en active Active
- 2015-11-26 RU RU2017122481A patent/RU2674726C1/en active
- 2015-11-26 CA CA2968590A patent/CA2968590A1/en not_active Abandoned
- 2015-11-26 US US15/525,575 patent/US10550525B2/en active Active
- 2015-11-26 CN CN201580061901.4A patent/CN107208383A/en active Pending
Non-Patent Citations (1)
| Title |
|---|
| None * |
Also Published As
| Publication number | Publication date |
|---|---|
| AT516590A1 (en) | 2016-06-15 |
| US20170328013A1 (en) | 2017-11-16 |
| EP3224416A1 (en) | 2017-10-04 |
| RU2674726C1 (en) | 2018-12-12 |
| CN107208383A (en) | 2017-09-26 |
| US10550525B2 (en) | 2020-02-04 |
| CA2968590A1 (en) | 2016-06-02 |
| WO2016081971A1 (en) | 2016-06-02 |
| AU2015354375A1 (en) | 2017-05-25 |
| AT516590B1 (en) | 2017-01-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3224416B1 (en) | Method and device for compacting the ballast bed of a track | |
| AT391903B (en) | DRIVABLE TRACK MACHINE WITH A DEVICE FOR CONTROLLING THE WORKING POSITION OF YOUR WORKING AGGREGATE OR. -TOOLS | |
| EP4144915B1 (en) | Method for controlling a track construction machine | |
| EP3204557B1 (en) | Tamping machine for compacting the ballast bed of a track | |
| DE3904179C2 (en) | Mobile track tamping, lifting and straightening machine for lifting and / or moving a track sideways in the turnout and crossing area | |
| DE3313207C2 (en) | ||
| EP3303703B1 (en) | Tamping machine for compacting the ballast bed of a track | |
| EP3009564A1 (en) | Tamping machine for the compaction of railway ballast | |
| DE3838109A1 (en) | METHOD AND TRACKABLE SWITCH LEVELING, TAMPING AND LEVELING MACHINE ARRANGEMENT FOR PROCESSING IN SWITCH AREAS | |
| EP4337829A1 (en) | Tamping machine for compacting the ballast bed of a track | |
| AT17436U1 (en) | Method for the automatic autonomous control of a tamping machine | |
| AT525332A1 (en) | Procedure for correcting the lateral distance and the vertical distance of a platform edge to the track axis | |
| DE2056273B2 (en) | Mobile device for treating the ballast bedding and the small iron parts of a track |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE INTERNATIONAL PUBLICATION HAS BEEN MADE |
|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20170407 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| DAV | Request for validation of the european patent (deleted) | ||
| DAX | Request for extension of the european patent (deleted) | ||
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20180525 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20201208 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1369928 Country of ref document: AT Kind code of ref document: T Effective date: 20210315 Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502015014393 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PK Free format text: BERICHTIGUNGEN |
|
| RIN2 | Information on inventor provided after grant (corrected) |
Inventor name: LICHTBERGER, BERNHARD |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210310 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210611 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210310 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210610 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210610 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210310 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20210310 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210310 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210310 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210310 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210310 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210310 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210310 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210310 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210310 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210310 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210310 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210712 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210710 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502015014393 Country of ref document: DE |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210310 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210310 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210310 |
|
| 26N | No opposition filed |
Effective date: 20211213 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210310 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210710 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210310 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20211126 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20211130 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20211130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20211130 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20211130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20211126 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 1369928 Country of ref document: AT Kind code of ref document: T Effective date: 20211126 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20211126 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20151126 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230428 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210310 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20231121 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20231124 Year of fee payment: 9 Ref country code: FR Payment date: 20231123 Year of fee payment: 9 Ref country code: DE Payment date: 20231127 Year of fee payment: 9 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210310 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210310 |