EP3135860B1 - Pumping system and method - Google Patents
Pumping system and method Download PDFInfo
- Publication number
- EP3135860B1 EP3135860B1 EP16183126.8A EP16183126A EP3135860B1 EP 3135860 B1 EP3135860 B1 EP 3135860B1 EP 16183126 A EP16183126 A EP 16183126A EP 3135860 B1 EP3135860 B1 EP 3135860B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- hydraulic
- seal
- piston
- pressure
- piston rod
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000005086 pumping Methods 0.000 title claims description 38
- 238000000034 method Methods 0.000 title description 28
- 239000012530 fluid Substances 0.000 claims description 122
- 238000006073 displacement reaction Methods 0.000 claims description 30
- 239000000314 lubricant Substances 0.000 claims description 17
- 230000004044 response Effects 0.000 claims description 17
- 238000005259 measurement Methods 0.000 claims description 10
- 230000000712 assembly Effects 0.000 claims description 9
- 238000000429 assembly Methods 0.000 claims description 9
- 230000003068 static effect Effects 0.000 claims description 7
- 230000001105 regulatory effect Effects 0.000 claims description 4
- IJGRMHOSHXDMSA-UHFFFAOYSA-N Atomic nitrogen Chemical compound N#N IJGRMHOSHXDMSA-UHFFFAOYSA-N 0.000 description 48
- 239000007789 gas Substances 0.000 description 32
- 229910052757 nitrogen Inorganic materials 0.000 description 21
- 230000003247 decreasing effect Effects 0.000 description 11
- 238000004519 manufacturing process Methods 0.000 description 11
- 239000000463 material Substances 0.000 description 11
- 239000007788 liquid Substances 0.000 description 10
- 230000008859 change Effects 0.000 description 9
- 230000007423 decrease Effects 0.000 description 9
- 229910001873 dinitrogen Inorganic materials 0.000 description 7
- 230000002441 reversible effect Effects 0.000 description 7
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 7
- 230000009471 action Effects 0.000 description 6
- 230000005291 magnetic effect Effects 0.000 description 6
- 239000012528 membrane Substances 0.000 description 6
- 239000003921 oil Substances 0.000 description 6
- 230000002829 reductive effect Effects 0.000 description 5
- 239000004696 Poly ether ether ketone Substances 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- NBVXSUQYWXRMNV-UHFFFAOYSA-N fluoromethane Chemical compound FC NBVXSUQYWXRMNV-UHFFFAOYSA-N 0.000 description 4
- 238000012544 monitoring process Methods 0.000 description 4
- 150000002825 nitriles Chemical class 0.000 description 4
- 239000002245 particle Substances 0.000 description 4
- 229920002530 polyetherether ketone Polymers 0.000 description 4
- 238000007789 sealing Methods 0.000 description 4
- OKTJSMMVPCPJKN-UHFFFAOYSA-N Carbon Chemical compound [C] OKTJSMMVPCPJKN-UHFFFAOYSA-N 0.000 description 3
- 229910000831 Steel Inorganic materials 0.000 description 3
- 230000008901 benefit Effects 0.000 description 3
- 229910052799 carbon Inorganic materials 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 239000010959 steel Substances 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 2
- 230000004888 barrier function Effects 0.000 description 2
- 230000033228 biological regulation Effects 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 2
- 239000004568 cement Substances 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 230000005611 electricity Effects 0.000 description 2
- 239000004519 grease Substances 0.000 description 2
- 239000010720 hydraulic oil Substances 0.000 description 2
- 230000006872 improvement Effects 0.000 description 2
- 238000002955 isolation Methods 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 229910001172 neodymium magnet Inorganic materials 0.000 description 2
- 239000001301 oxygen Substances 0.000 description 2
- 229910052760 oxygen Inorganic materials 0.000 description 2
- 229920001515 polyalkylene glycol Polymers 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 239000000126 substance Substances 0.000 description 2
- 238000006467 substitution reaction Methods 0.000 description 2
- 238000010795 Steam Flooding Methods 0.000 description 1
- 241000282485 Vulpes vulpes Species 0.000 description 1
- 238000005299 abrasion Methods 0.000 description 1
- 238000007792 addition Methods 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 230000003466 anti-cipated effect Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 239000003990 capacitor Substances 0.000 description 1
- 238000002485 combustion reaction Methods 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 230000001276 controlling effect Effects 0.000 description 1
- 238000012217 deletion Methods 0.000 description 1
- 230000037430 deletion Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000003302 ferromagnetic material Substances 0.000 description 1
- 238000007667 floating Methods 0.000 description 1
- 230000004907 flux Effects 0.000 description 1
- 239000002783 friction material Substances 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 239000010437 gem Substances 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 239000011261 inert gas Substances 0.000 description 1
- 230000000977 initiatory effect Effects 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 230000000670 limiting effect Effects 0.000 description 1
- 238000005461 lubrication Methods 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 229910001092 metal group alloy Inorganic materials 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 150000002829 nitrogen Chemical class 0.000 description 1
- 239000003129 oil well Substances 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 230000002459 sustained effect Effects 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images







Classifications
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH DRILLING; MINING
- E21B—EARTH DRILLING, e.g. DEEP DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B43/00—Methods or apparatus for obtaining oil, gas, water, soluble or meltable materials or a slurry of minerals from wells
- E21B43/12—Methods or apparatus for controlling the flow of the obtained fluid to or in wells
- E21B43/121—Lifting well fluids
- E21B43/126—Adaptations of down-hole pump systems powered by drives outside the borehole, e.g. by a rotary or oscillating drive
Definitions
- This disclosure relates generally to equipment utilized and operations performed in conjunction with a subterranean well and, in one example described below, more particularly provides a hydraulic pumping system, such as a hydraulic pumping system with enhanced piston rod sealing.
- Reservoir fluids can sometimes flow to the earth's surface when a well has been completed. However, with some wells, reservoir pressure may be insufficient (at the time of well completion or thereafter) to lift the fluids (in particular, liquids) to the surface. In those circumstances, technology known as “artificial lift” can be employed to bring the fluids to the surface (or other desired location, such as a subsea production facility or pipeline, etc.).
- a downhole pump is operated by reciprocating a string of "sucker" rods deployed in a well.
- An apparatus (such as, a walking beam-type pump jack or a hydraulic actuator) located at the surface can be used to reciprocate the rod string.
- US8066496B2 describes a reciprocated pump positioned at the lower end of a string of tubing in a bore hole that provides a passageway for moving formation fluid to the earth's surface.
- CA2515616A1 describes a convertible rotary seal with a housing for receiving a polish rod.
- CA2288479A1 describes a downhole rotary pumping arrangement with drivehead gimbals and seals.
- FIG. 1 Representatively illustrated in FIG. 1 is a hydraulic pumping system 10 and associated method for use with a subterranean well, which system and method can embody principles of this disclosure.
- the hydraulic pumping system 10 and method are merely one example of an application of the principles of this disclosure in practice, and a wide variety of other examples are possible. Therefore, the scope of this disclosure is not limited at all to the details of the system 10 and method as described herein or depicted in the drawings.
- a hydraulic pressure source 12 is used to apply hydraulic pressure to, and exchange hydraulic fluid with, a hydraulic actuator 14 mounted on a wellhead 16.
- the hydraulic actuator 14 reciprocates a rod string 18 extending into the well, thereby operating a downhole pump 20.
- the rod string 18 may be made up of individual sucker rods connected to each other, although other types of rods or tubes may be used, the rod string 18 may be continuous or segmented, a material of the rod string 18 may comprise steel, composites or other materials, and elements other than rods may be included in the string.
- the scope of this disclosure is not limited to use of any particular type of rod string, or to use of a rod string at all. It is only necessary for purposes of this disclosure to communicate reciprocating motion of the hydraulic actuator 14 to the downhole pump 20, and it is therefore within the scope of this disclosure to use any structure capable of such transmission.
- the downhole pump 20 is depicted in FIG. 1 as being of the type having a stationary or “standing” valve 22 and a reciprocating or “traveling" valve 24.
- the traveling valve 24 is connected to, and reciprocates with, the rod string 18, so that fluid 26 is pumped from a wellbore 28 into a production tubing string 30.
- the downhole pump 20 is merely one example of a wide variety of different types of pumps that may be used with the hydraulic pumping system 10 and method of FIG. 1 , and so the scope of this disclosure is not limited to any of the details of the downhole pump described herein or depicted in the drawings.
- the wellbore 28 is depicted in FIG. 1 as being generally vertical, and as being lined with casing 32 and cement 34.
- a section of the wellbore 28 in which the pump 20 is disposed may be generally horizontal or otherwise inclined at any angle relative to vertical, and the wellbore section may not be cased or may not be cemented.
- the scope of this disclosure is not limited to use of the hydraulic pumping system 10 and method with any particular wellbore configuration.
- the fluid 26 originates from an earth formation 36 penetrated by the wellbore 28.
- the fluid 26 flows into the wellbore 28 via perforations 38 extending through the casing 32 and cement 34.
- the fluid 26 can be a liquid, such as oil, gas condensate, water, etc.
- the scope of this disclosure is not limited to use of the hydraulic pumping system 10 and method with any particular type of fluid, or to any particular origin of the fluid.
- the casing 32 and the production tubing string 30 extend upward to the wellhead 16 at or near the earth's surface 40 (such as, at a land-based wellsite, a subsea production facility, a floating rig, etc.).
- the production tubing string 30 can be hung off in the wellhead 16, for example, using a tubing hanger (not shown).
- a tubing hanger not shown.
- FIG. 1 only a single string of the casing 32 is illustrated in FIG. 1 for clarity, in practice multiple casing strings and optionally one or more liner (a liner string being a pipe that extends from a selected depth in the wellbore 28 to a shallower depth, typically sealingly "hung off” inside another pipe or casing) strings may be installed in the well.
- a rod blowout preventer stack 42 and an annular seal housing 44 are connected between the hydraulic actuator 14 and the wellhead 16.
- the rod blowout preventer stack 42 includes various types of blowout preventers (BOP's) configured for use with the rod string 18.
- BOP's blowout preventers
- one blowout preventer can prevent flow through the blowout preventer stack 42 when the rod string 18 is not present therein
- another blowout preventer can prevent flow through the blowout preventer stack 42 when the rod string 18 is present therein.
- the scope of this disclosure is not limited to use of any particular type or configuration of blowout preventer stack with the hydraulic pumping system 10 and method of FIG. 1 .
- the annular seal housing 44 includes an annular seal (described more fully below) about a piston rod of the hydraulic actuator 14.
- the piston rod (also described more fully below) connects to the rod string 18 below the annular seal,.
- the hydraulic pressure source 12 may be connected directly to the hydraulic actuator 14, or it may be positioned remotely from the hydraulic actuator 14 and connected with, for example, suitable hydraulic hoses or pipes. Operation of the hydraulic pressure source 12 is controlled by a control system 46.
- the control system 46 may allow for manual or automatic operation of the hydraulic pressure source 12, based on operator inputs and measurements taken by various sensors.
- the control system 46 may be separate from, or incorporated into, the hydraulic pressure source 12.
- at least part of the control system 46 could be remotely located or web-based, with two-way communication between the hydraulic pressure source 12 and the control system 46 being via, for example, satellite, wireless or wired transmission.
- the control system 46 can include various components, such as a programmable controller, input devices (e.g., a keyboard, a touchpad, a data port, etc.), output devices (e.g., a monitor, a printer, a recorder, a data port, indicator lights, alert or alarm devices, etc.), a processor, software (e.g., an automation program, customized programs or routines, etc.) or any other components suitable for use in controlling operation of the hydraulic pressure source 12.
- a programmable controller e.g., a keyboard, a touchpad, a data port, etc.
- output devices e.g., a monitor, a printer, a recorder, a data port, indicator lights, alert or alarm devices, etc.
- software e.g., an automation program, customized programs or routines, etc.
- the scope of this disclosure is not limited to any particular type or configuration of a control system.
- the control system 46 causes the hydraulic pressure source 12 to increase pressure applied to the hydraulic actuator 14 (delivering a volume of hydraulic fluid into the hydraulic actuator), in order to raise the rod string 18.
- the hydraulic pressure source 12 receives a volume of hydraulic fluid from the hydraulic actuator 14 (thereby decreasing pressure applied to the hydraulic actuator), in order to allow the rod string 18 to descend.
- the rod string 18 is reciprocated, the downhole pump 20 is actuated and the fluid 26 is pumped out of the well.
- the hydraulic pressure source 12 is not required to increase pressure in the hydraulic actuator 14 from zero to that necessary to displace the rod string 18 upwardly (along with the displaced fluid 26), and then reduce the pressure back to zero, for each reciprocation of the rod string 18. Instead, the hydraulic pressure source 12 only has to increase pressure in the hydraulic actuator 14 sufficiently greater than the balance pressure to displace the rod string 18 to its upper stroke extent, and then reduce the pressure in the hydraulic actuator 14 back to the balance pressure to allow the rod string 18 to displace back to its lower stroke extent.
- the balance pressure in the hydraulic actuator 14 it is not necessary for the balance pressure in the hydraulic actuator 14 to exactly offset the load exerted by the rod string 18. In some examples, it may be advantageous for the balance pressure to be somewhat less than that needed to offset the load exerted by the rod string 18. In addition, it can be advantageous in some examples for the balance pressure to change over time. Thus, the scope of this disclosure is not limited to use of any particular or fixed balance pressure, or to any particular relationship between the balance pressure, any other force or pressure and/or time.
- a reciprocation speed of the rod string 18 will affect a flow rate of the fluid 26.
- a fluid interface 48 in the wellbore 28 can be affected by the flow rate of the fluid 26 from the well.
- the fluid interface 48 could be an interface between oil and water, gas and water, gas and gas condensate, gas and oil, steam and water, or any other fluids or combination of fluids.
- the fluid interface 48 may descend in the wellbore 28, so that eventually the pump 20 will no longer be able to pump the fluid 26 (a condition known to those skilled in the art as "pump-off").
- a desired flow rate of the fluid 26 may change over time (for example, due to depletion of a reservoir, changed offset well conditions, water or steam flooding characteristics, etc.).
- a "gas-locked" downhole pump 20 can result from a pump-off condition, whereby gas is received into the downhole pump 20.
- the gas is alternately expanded and compressed in the downhole pump 20 as the traveling valve 24 reciprocates, but the fluid 26 cannot flow into the downhole pump 20, due to the gas therein.
- the control system 46 can automatically control operation of the hydraulic pressure source 12 to regulate the reciprocation speed, so that pump-off is avoided, while achieving any of various desirable objectives.
- Those objectives may include maximum flow rate of the fluid 26, optimized rate of electrical power consumption, reduction of peak electrical loading, etc.
- the scope of this disclosure is not limited to pursuing or achieving any particular objective or combination of objectives via automatic reciprocation speed regulation by the control system 46.
- the hydraulic pressure source 12 controls pressure in the hydraulic actuator 14, so that the rod string 18 is displaced alternately to its upper and lower stroke extents. These extents do not necessarily correspond to maximum possible upper and lower displacement limits of the rod string 18 or the pump 20.
- valve rod bushing 25 above the traveling valve 24 it is typically undesirable for a valve rod bushing 25 above the traveling valve 24 to impact a valve rod guide 23 above the standing valve 22 when the rod string 18 displaces downwardly (a condition known to those skilled in the art as "pump-pound").
- the rod string 18 be displaced downwardly only until the valve rod bushing 25 is near its maximum possible lower displacement limit, so that it does not impact the valve rod guide 23.
- a desired stroke of the rod string 18 may change over time (for example, due to gradual lengthening of the rod string 18 as a result of lowering of a liquid level (such as at fluid interface 48) in the well, etc.).
- the control system 46 can automatically control operation of the hydraulic pressure source 12 to regulate the upper and lower stroke extents of the rod string 18, so that pump-pound is avoided, while achieving any of various desirable objectives.
- Those objectives may include maximizing rod string stroke length, maximizing production, minimizing electrical power consumption rate, minimizing peak electrical loading, etc.
- the scope of this disclosure is not limited to pursuing or achieving any particular objective or combination of objectives via automatic stroke extent regulation by the control system 46.
- FIG. 2 an enlarged scale cross-sectional view of an example of the hydraulic actuator 14 as used in the hydraulic pumping system 10 is representatively illustrated. Note that the hydraulic actuator 14 of FIG. 2 may be used with other systems and methods, in keeping with the principles of this disclosure.
- the hydraulic actuator 14 includes a generally tubular cylinder 50, a piston 52 sealingly and reciprocably disposed in the cylinder 50, and a piston rod 54 connected to the piston 52.
- the piston 52 and piston rod 54 displace relative to the cylinder 50 in response to a pressure differential applied across the piston 52.
- Hydraulic fluid and pressure are communicated between the hydraulic pressure source 12 and an annular chamber 56 in the cylinder 50 below the piston 52 via a port 58.
- a vent valve 60 is connected via a tubing 62 to an upper chamber 64 above the piston 52.
- the upper chamber 64 is maintained at substantially atmospheric pressure (zero gauge pressure), and pressure in the annular chamber 56 is controlled by the hydraulic pressure source 12, in order to control displacement of the piston 52 and piston rod 54 (and the rod string 18 connected thereto).
- annular seal assembly 66 is sealingly received in a lower flange 68 of the hydraulic actuator 14.
- the annular seal assembly 66 also sealingly engages an outer surface of the piston rod 54.
- a lower end of the annular chamber 56 is sealed off by the annular seal assembly 66.
- the piston 52 is at a maximum possible upper limit of displacement. However, during a pumping operation, the piston 52 may not be displaced to this maximum possible upper limit of displacement. For example, as discussed above, an upper stroke extent of the rod string 18 may be regulated to achieve various objectives.
- the piston 52 also may not be displaced to a maximum possible lower limit of displacement.
- upper and lower extents of displacement of the piston 52 and rod 54 can be varied to produce corresponding changes in the upper and lower stroke extents of the rod string 18, in order to achieve various objectives (such as, preventing pump-off, preventing pump-pound, optimizing pumping efficiency, reducing peak electrical loading, etc.).
- FIG. 3 a further enlarged scale cross-sectional view of an upper portion of the hydraulic actuator 14 is representatively illustrated. This view is rotated somewhat about a vertical axis of the hydraulic actuator 14 (as compared to FIG. 2 ), so that a sensor 70, for example, a magnetic field sensor, is visible in FIG. 3 .
- a sensor 70 for example, a magnetic field sensor
- the sensor 70 is secured to an outer surface of the cylinder 50 (for example, using a band clamp). In other examples, the sensor 70 could be bonded, threaded or otherwise attached to the cylinder 50, or could be incorporated into the cylinder or another component of the hydraulic actuator 14.
- a position of the sensor 70 relative to the cylinder 50 can be adjustable.
- the sensor 70 could be movable longitudinally along the cylinder 50, for example, via a threaded rod or another type of linear actuator.
- a suitable magnetic field sensor is a Pepperl MB-F32-A2 magnetic flux sensing switch marketed by Pepperl+Fuchs North America of Twinsburg, Ohio USA.
- other magnetic field sensors may be used in keeping with the principles of this disclosure.
- the sensor 70 (when a magnetic field sensor is used) is capable of sensing a presence of a magnet 72 through a wall 74 of the cylinder 50.
- the magnet 72 is secured to, and displaces with, the piston 52.
- the sensor 70 can sense the presence of the magnet 72, even though the wall 74 comprises a ferromagnetic material (such as steel), and even though the wall is relatively thick (such as, approximately 1.27 cm or greater thickness).
- a suitable magnet for use in the actuator 14 is a neodymium magnet (such as, a neodymium-iron-boron magnet) in ring form.
- a neodymium magnet such as, a neodymium-iron-boron magnet
- other types and shapes of magnets may be used in keeping with the principles of this disclosure.
- sensors 70 could be distributed in a variety of different manners along the cylinder 50 (e.g., linearly, helically, evenly spaced, unevenly spaced, etc.).
- an output of the sensor 70 is communicated to the control system 46, so that a position of the piston 52 at any given point in the pumping operation is determinable. As the number of sensors 70 is increased, determination of the position of the piston 52 at any given point in the pumping operation can become more accurate.
- two of the sensors 70 could be positioned on the cylinder 50, with one sensor at a position corresponding to an upper stroke extent of the piston 52 and magnet 72, and the other sensor at a position corresponding to a lower stroke extent of the piston and magnet.
- the control system 46 appropriately reverses the stroke direction of the piston 52 by operation of hydraulic components to be described further below.
- the upper and lower stroke extents of the piston 52 can be conveniently varied by adjusting the longitudinal positions of the sensors 70 on the cylinder 50.
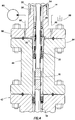
- FIG. 4 a cross-sectional view of a lower portion of the hydraulic actuator 14, the annular seal housing 44 and an upper flange of the BOP stack 42 is representatively illustrated.
- a threaded connection 76 between the piston rod 54 and the rod string 18 can be seen in the annular seal housing 44 below an annular seal assembly 78.
- the annular seal assembly 78 seals off an annular space between the exterior surface of the piston rod 54 and an interior surface of the annular seal housing 44.
- the annular seal assembly 78 is similar in some respects to the annular seal assembly 66 in the hydraulic actuator 14, but the annular seal assembly 78 shown in FIG. 4 is exposed to pressure in the well (when the rod BOP's are not actuated), whereas the annular seal assembly (66 in FIG. 3 ) is exposed to pressure in the annular chamber (56 in FIG. 3 ) of the hydraulic actuator 14.
- a lubricant injector 80 slowly pumps grease or another lubricant 86 into an annular chamber 82 formed in the lower flange 68 of the hydraulic actuator 14 and an upper flange 84 of the annular seal housing 44.
- the lubricant 86 flows out of the annular chamber 82 to a reservoir 88.
- the lubricant 86 could be sourced from the hydraulic fluid in the annular chamber (56 in FIG. 3 ) or the hydraulic pressure source (12 in FIG. 1 ).
- An advantage of having the lubricant 86 flow through the annular chamber 82 is that, if well fluid leaks past the annular seal assembly 78, or if hydraulic fluid leaks past the annular seal assembly (66 in FIG. 3 ), it will be apparent in the lubricant delivered to the reservoir 88.
- the lubricant injector 80 it is not necessary for the lubricant injector 80 to deliver pressurized lubricant 86 into the annular chamber 82 in keeping with the scope of this disclosure.
- the lubricant 86 could instead be delivered from an unpressurized reservoir by gravity flow, etc.
- annular seal assemblies 66, 78 in the flanges 68, 84 are both accessible by separating the flanges 68, 84 (for example, when the hydraulic actuator 14 is removed from the annular seal housing 44 for periodic maintenance).
- the scope of this disclosure is not limited to pursuing or achieving any particular advantage, objective or combination of objectives by the hydraulic pumping system 10, hydraulic actuator 14, hydraulic pressure source 12 or annular seal housing 44.
- FIG. 5 a top view of an example of the hydraulic pressure source 12 is representatively illustrated.
- a top cover of the hydraulic pressure source 12 is not illustrated, so that internal components of the hydraulic pressure source 12 are visible.
- the hydraulic pressure source 12 includes a prime mover 90, a primary hydraulic pump 92, an accessory hydraulic pump 94, a hydraulic fluid reservoir 96, a hydraulic fluid heat radiator 98 with fan 100, a nitrogen concentrator assembly 102, and a gas balancing assembly 104.
- the control system 46 is included with the hydraulic pressure source 12 in this example.
- the prime mover 90 can be a fixed or variable speed electric motor (or any other suitable type of motor or engine).
- the control system 46 controls operation of the prime mover 90 in an efficient manner that minimizes a cost of supplying electricity or fuel to the prime mover 90.
- This efficient manner may vary, depending on, for example, how a local electric utility company charges for electrical service (e.g., by peak load or by kilowatt hours used).
- the prime mover 90 could in other examples be an internal combustion engine, a turbine or positive displacement motor rotated by flow of gas from the well, or any other type of engine or motor.
- the type of prime mover is not in any way intended to limit the scope of this disclosure.
- the primary hydraulic pump 92 is driven by the prime mover 90 and supplies hydraulic fluid 106 under pressure from the gas balancing assembly 104 to the hydraulic actuator 14, in order to raise the piston 52 (and piston rod 54 and rod string 18).
- a filter 108 filters the hydraulic fluid 106 that flows from the hydraulic actuator 14 to the primary hydraulic pump 92 (flow from the pump to the actuator bypasses the filter).
- this "reverse" flow of the hydraulic fluid 106 can cause a rotor in the prime mover 90 to rotate "backward” and thereby generate electrical power.
- this generated electrical power may be used to offset a portion of the electrical power consumed by the prime mover 90, in order to reduce the cost of supplying electricity to the prime mover.
- the scope of this disclosure is not limited to generation of electrical power by reverse flow of the hydraulic fluid 106 through the primary hydraulic pump 92.
- the accessory hydraulic pump 94 can be used to initially charge the gas balancing assembly 104 with the hydraulic fluid 106 and circulate the hydraulic fluid 106 through the radiator 98.
- the nitrogen concentrator assembly 102 is used to produce pressurized and concentrated nitrogen gas by removal of oxygen from air (that is, non-cryogenically). In other examples, cryogenic nitrogen or another inert gas source could be used instead of, or in addition to, the nitrogen concentrator assembly 102.
- the nitrogen concentrator assembly 102 pressurizes the gas balancing assembly 104 and thereby causes the balance pressure discussed above to be applied to the hydraulic actuator 14.
- the balance pressure can be varied by control of the nitrogen concentrator assembly 102 by the control system 46.
- the control system 46 controls operation of the nitrogen concentrator assembly 102 in response to various operator inputs and sensor measurements.
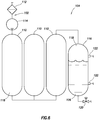
- FIG. 6 a schematic view of an example of the gas balancing assembly 104 is representatively illustrated with the nitrogen concentrator assembly 102.
- the gas balancing assembly 104 includes one or more gas volumes 110 that receive pressurized nitrogen from the nitrogen concentrator assembly 102.
- the nitrogen concentrator assembly 102 includes a membrane filter 112 and a compressor 114 in this example.
- a total volume of the gas volumes 110 can be varied, depending on well conditions, anticipated pressures, a stroke length and piston area of the piston (52 in FIG. 3 ), etc. Although three gas volumes 110 are depicted in FIG. 6 , any number of gas volumes may be used, as desired.
- the gas balancing assembly 104 also includes an accumulator 116 connected to the gas volumes 110.
- an upper portion of the accumulator 116 has the pressurized nitrogen gas 118 therein.
- the gas volumes 110 could be combined with the accumulator 116.
- a lower portion of the accumulator 116 has the hydraulic fluid 106 therein.
- the accumulator 116 is of the type known to those skilled in the art as a "gas over liquid" accumulator.
- there is no barrier such as, a bladder or piston
- the hydraulic fluid 106 is in direct contact with the nitrogen gas 118 in the accumulator 116, and maintenance requirements for the accumulator 116 are reduced or eliminated (due at least to the absence of a barrier between the nitrogen gas 118 and the hydraulic fluid 106).
- a suitable hydraulic fluid for use in the accumulator 116 in direct contact with the nitrogen gas 118 is a polyalkylene glycol (PAG) synthetic oil, such as SYNLUBE P12 marketed by American Chemical Technologies, Inc. of Fowlerville, Michigan USA.
- PAG polyalkylene glycol
- the compressor 114 pressurizes the nitrogen gas 118, and this pressure is applied to the hydraulic fluid 106 in the accumulator 116.
- a valve 120 (such as, a pilot operated control valve) selectively permits and prevents flow of the hydraulic fluid 106 between the accumulator 116 and the primary hydraulic pump 92.
- the valve 120 is open while the hydraulic pressure source 12 is being used to reciprocate the rod string 18 (thereby allowing the hydraulic fluid 106 to flow back and forth between the accumulator 116 and the hydraulic actuator 14), and is otherwise normally closed.
- the control system 46 can control operation of the valve 120.
- One or more liquid level sensors 122 on the accumulator 116 detect whether a level of the hydraulic fluid 106 is at upper or lower limits.
- the hydraulic fluid 106 level typically should not (although at times it may) rise above the upper limit when the piston (52 in FIG. 3 ) displaces to its lower stroke extent in the cylinder (50 in FIG. 3 ) and triggers a sensor (70 in FIG. 3 ), and the hydraulic fluid 106 level typically should not (although at times it may) fall below the lower limit when the piston (52 in FIG. 3 ) rises to its upper stroke extent and triggers a sensor (70 in FIG. 3 ).
- a suitable liquid level sensor for use on the accumulator 116 is an electro-optic level switch model no. ELS-1150XP marketed by Gems Sensors & Controls of Plainville, Connecticut USA. However, other types of sensors may be used in keeping with the scope of this disclosure.
- the liquid level sensors 122 are connected to the control system 46, which can increase the hydraulic fluid 106 level by operation of the accessory hydraulic pump 94. Typically, a decrease in hydraulic fluid 106 level is constantly occurring via a lubrication case drain of the primary hydraulic pump 92 and other seals of the hydraulic pressure source 12 and hydraulic actuator 14, with this hydraulic fluid 106 being directed back to the radiator 98 and hydraulic fluid reservoir 96. Although two liquid level sensors 122 are depicted in FIG. 6 , any number of liquid level sensors (or a single continuous sensor) may be used, as may be desired.
- FIG. 7 an example process and instrumentation diagram for the hydraulic pressure source 12 is representatively illustrated. Various components of the hydraulic pressure source 12 are indicated in the diagram using the following symbols in the table below labeled "Equipment.”
- I-1 Fluid Level Sensor for Hydraulic Fluid Reservoir E-10 (96) I-2 Temperature Sensor for Hydraulic Fluid Reservoir E-10 (96) I-3 N 2 Pressure Sensor I-4 Magnetic Field Sensor(s) (70) on Cylinder (50) I-5 Control System (46) I-6 Accumulator E-4 (116) High Fluid Level Sensor (122) I-7 Accumulator E-4 (116) Low Fluid Level Sensor (122) I-8 Temperature Sensor on Primary Pump E-7 (92) Outlet I-9 Pressure Sensor on Primary Hydraulic Pump E-7 (92) Accumulator Side (to prevent cavitation) I-10 Pressure Sensor on Primary Hydraulic Pump E-7 (92) Outlet (to Cylinder 50)
- the hydraulic pressure source 12 is powered on, and certain parameters are input to the control system 46 (for example, via a touch screen, keypad, data port, etc.). These parameters can include characteristics of the hydraulic actuator 14 (such as, piston 52 area and maximum stroke length), characteristics of the well (such as, expected minimum and maximum rod string 18 loads, expected well pressure, initial fluid 26 flow rate, etc.), or any other parameters or combination of parameters. Some parameters may already be input to the control system 46 (such as, stored in non-volatile memory), for example, characteristics of the hydraulic pressure source 12 and hydraulic actuator 14 that are not expected to change, or default parameters.
- characteristics of the hydraulic actuator 14 such as, piston 52 area and maximum stroke length
- characteristics of the well such as, expected minimum and maximum rod string 18 loads, expected well pressure, initial fluid 26 flow rate, etc.
- Some parameters may already be input to the control system 46 (such as, stored in non-volatile memory), for example, characteristics of the hydraulic pressure source 12 and hydraulic actuator 14 that are not expected to change, or default parameters.
- the piston rod 54 is already connected to the rod string 18, and the hydraulic actuator 14 is installed on the wellhead 16 above the rod BOP stack 42 and the annular seal housing 44.
- the control valve 120 is closed, thereby preventing communication between the gas balancing assembly 104 and the primary pump 92.
- the volumes 110 and accumulator 116 may be purged with nitrogen and optionally pre-charged with pressure prior to the start-up operation.
- lines and volumes in the hydraulic pressure source 12 and the hydraulic actuator 14, and lines between the hydraulic pressure source 12 and the hydraulic actuator 14, may be purged with hydraulic fluid 106 prior to (or as part of) the start-up operation.
- the control system 46 determines a minimum volume of the hydraulic fluid 106 that will be needed for reciprocating the piston 52 in the cylinder 50. Alternatively, a default volume of the hydraulic fluid 106 (which volume is appropriate for the actuator 14 characteristics) may be used.
- An appropriate volume of the hydraulic fluid 106 (which volume is preferably greater than the minimum needed) is flowed by operation of the accessory pump 94 from the hydraulic fluid reservoir 96 to fill the hydraulic fluid vessel (E-5 in the Equipment Table) and a lower portion of the accumulator 116.
- the level sensors 122 are used with the control system 46 to verify that an appropriate level of the hydraulic fluid 106 is present in the accumulator 116.
- the control system 46 determines an appropriate balance pressure that should be applied, based on, for example, the input parameters. Nominally, the balance pressure can be equal to the expected minimum load exerted by the rod string 18 in operation, divided by the piston area of the piston 52. However, as mentioned above, it may in some circumstances be advantageous to increase or decrease the balance pressure somewhat.
- the air compressor (E-15 in the Equipment Table) is activated to supply a flow of pressurized air through the cooler (E-19 in the Equipment Table) and the air filters (E-12, E-13, E-14 in the Equipment Table) to the membrane filter 112.
- the membrane filter 112 provides a flow of concentrated nitrogen 118 (e.g., by removal of substantially all oxygen from the air) to the booster compressor 114. Note that pressurized air is also supplied to the booster compressor 114 from the compressor E-15 for operation of the booster compressor.
- the nitrogen 118 flows from the booster compressor 114 into the volumes 110 and an upper portion of the accumulator 116.
- the booster compressor 114 elevates a pressure of this nitrogen 118 to the desired balance pressure.
- the pressure sensor I-3 monitors the pressure in the gas balancing assembly 104. By virtue of the hydraulic fluid 106 being in contact with the nitrogen 118 in the accumulator 116, the nitrogen pressure is the same as the hydraulic fluid pressure.
- each of the sensors (I-1, I-2, I-3, I-4, I-6, I-7, I-8, I-9, I-10 in the Equipment Table) is connected to the control system 46, so that the control system 46 is capable of monitoring parameters sensed by the sensors. Adjustments to the input parameters can be made by the control system 46 in response to measurements made by the sensors if needed to maintain a desired condition (such as, efficient and economical operation), or to mitigate an undesired condition (such as, pump-off or pump-pound). Such adjustments may be made manually (for example, based on user input), or automatically (for example, based on instructions or programs stored in the control system 46 memory), or a combination of manually and automatically (for example, using a program that initiates automatic control in response to a manual input).
- the piston 52, piston rod 54 and rod string 18 can now be raised by opening the control valve 120 and operating the primary hydraulic pump 92.
- the control valve 120 When the control valve 120 is opened, the balance pressure is applied to the annular chamber 56 below the piston 52 (see FIG. 2 ).
- the balance pressure applied to the annular chamber 56 will typically not cause the piston 52 and attached rod string 18 to displace upward, but some upward displacement of the rod string 18 may be desired in some circumstances.
- the primary hydraulic pump 92 flows pressurized hydraulic fluid 106 from the accumulator 116 and hydraulic fluid vessel E-5 to the annular chamber 56 of the hydraulic actuator 14, and increases the hydraulic fluid pressure therein, thereby causing the piston 52 and attached rod string 18 to rise in the wellbore 16 and operate the downhole pump 20 (see FIG. 1 ).
- a hydraulic fluid pressure increase (greater than the balance pressure) needed to displace the piston 52 upwardly to its upper stroke extent is dependent on various factors (such as, rod string 18 weight, friction in the well and in the hydraulic actuator 14, piston 52 area, well fluid 26 density, depth to the downhole pump 20, etc.).
- control system 46 can operate the primary hydraulic pump 92, so that the hydraulic fluid 106 flows into the annular chamber 56 until the piston 52 is displaced to its upper stroke extent.
- Such displacement of the piston 52 is indicated to the control system 46 by the sensor(s) 70 of the hydraulic actuator 14.
- the control system 46 can operate the primary hydraulic pump 92 in a manner that avoids an abrupt halt of the piston 52 displacement at the upper stroke extent (e.g., by reducing a flow rate of the hydraulic fluid 106 as the piston 52 approaches the upper stroke extent).
- the piston 52, piston rod 54 and rod string 18 can then be lowered by ceasing operation of the primary pump 92, and allowing the hydraulic fluid 106 to flow from the annular chamber 56 back through the primary hydraulic pump to the hydraulic fluid vessel E-5 and the accumulator 116. Pressure in the annular chamber 56 below the piston 52 will, thus, return to the balance pressure and the load exerted by the rod string 18 will cause the piston 52 and piston rod 54 to descend in the cylinder 50.
- the piston 52 may not return to its initial, lowermost position. Instead, the piston 52 typically will descend to a lower stroke extent that avoids pump-pound (e.g., bottoming out of the valve rod bushing 25 against the valve rod guide 23), while providing for efficient and economical operation.
- the control system 46 can operate a variable displacement swash plate (not shown separately) in the primary hydraulic pump 92 in a manner that avoids an abrupt halt of the piston 52 displacement at the lower stroke extent (e.g., by reducing a flow rate of the hydraulic fluid as the piston 52 approaches the lower stroke extent).
- the "reverse" flow of the hydraulic fluid 106 through the primary hydraulic pump 92 could, in some examples, cause the primary hydraulic pump 92 to rotate backward and thereby cause the prime mover 90 (when an electric motor is used) to generate electrical power.
- the prime mover 90 can serve as a motor when the hydraulic fluid 106 is pumped to the hydraulic actuator 14, and a generator when the hydraulic fluid is returned to the hydraulic pressure source 12.
- the generated electrical power may be stored (for example, using batteries, capacitors, etc.) for use by the hydraulic pressure source 12, or the electrical power may be supplied to the local electrical utility (for example, to offset the cost of electrical power supplied to the hydraulic pumping system 10, such as, in situations where the cost is based on demand and/or total usage).
- actuation of the hydraulic actuator 14 can be stopped, so that displacement of the piston 52 ceases, and a pressure level in the annular chamber 56 (e.g., sensed using the pressure sensor 1-10) needed to support the load exerted by the rod string 18 can be measured.
- the pressure in the accumulator 116 can then be adjusted, if needed, to provide an appropriate balance.
- the booster compressor 114 can be automatically operated by the control system 46 to increase the balance pressure when appropriate. For example, based on measurements of the pressure applied to the hydraulic actuator 14 over time (sensed by the pressure sensor 1-10), it may be determined that efficiency or economy of operation (or work performed, as described more fully below) would be enhanced by increasing the balance pressure. In such circumstances, the control system 46 can operate the booster compressor 114 to increase the pressure on the accumulator 116 until a desired, increased hydraulic balance pressure is achieved (e.g., as sensed by the pressure sensor I-3).
- a reciprocation speed can be adjusted to avoid this condition.
- the control system 46 can regulate the hydraulic fluid 106 flow rate (e.g., by varying an operational characteristic of the primary hydraulic pump 92 (such as, by adjusting a swash plate of the primary hydraulic pump 92), varying a rotational speed of the prime mover 90, varying a restriction to flow through the control valve 120, etc.) to decrease a speed of ascent or descent (or both) of the piston 52 in the cylinder 50 if pump-off is detected.
- a stroke length of the piston 52 could be decreased to cause a decrease in the flow rate of the fluid 26 from the well.
- the lower stroke extent of the piston 52 can be raised, for example, to avoid contact between the valve rod bushing 25 and the valve rod guide 23 in the downhole pump 20.
- the lower stroke extent can be raised by decreasing the volume of hydraulic fluid 106 returned to the hydraulic pressure source 12 from the hydraulic actuator 14 (e.g., by the control system 46 beginning to change displacement of a swash plate of the primary hydraulic pump 92 and thereby terminate reverse flow when the piston 52 has descended to the raised lower stroke extent).
- the upper stroke extent of the piston 52 can be lowered by decreasing the volume of hydraulic fluid 106 pumped into the hydraulic actuator 14 (e.g., by the control system 46 ceasing operation of the primary hydraulic pump 92 when the piston 52 has ascended to the lowered upper stroke extent).
- the balance pressure can be increased at any point in the pumping operation by the control system 46 operating the nitrogen concentrator assembly 102 and the booster compressor 114.
- the balance pressure can be decreased at any point in the operation by discharging an appropriate volume of the nitrogen 118 in the accumulator 116 and/or the nitrogen volumes 110 to the atmosphere.
- the valve manifold V-2/V-3/V-4 can comprise a two position manifold (such as, a National Fluid Power Association (NFPA) D05 manifold marketed by Daman Products Company, Inc. of Mishawaka, Indiana USA) with two position spring return solenoid valves.
- a solenoid valve V-2 of the manifold activates V-1 (control valve 120) upon V-2 being energized, and for as long as V-2 remains energized it holds the V-1 control valve (120) open.
- a sandwich relief valve (such as, an NFPA D05 20 MPa over-pressure safety relief valve marketed by Parker Hannifin Corporation of Cleveland, Ohio USA) can be used with the V-2 valve.
- Another sandwich relief valve V-4 (such as, adjustable 1 MPa to 7 MPa, set to 2 MPa) of the manifold can function as a charge circuit back-pressure/relief valve placed under a solenoid valve V-3.
- V-3 solenoid valve of the manifold closes off a 2 MPa relief flow to the radiator 98 (and back to the hydraulic fluid reservoir 96) to cause pressure from the accessory hydraulic pump 94 to rise to the balance pressure and inject a volume of hydraulic fluid 106 into P-3 (for example, to make up losses from the pressurized gas balancing assembly 104, primary hydraulic pump 92 and cylinder 50 circuit), until the level sensor I-6 indicates that sufficient hydraulic fluid is present in the accumulator 116.
- V-3 de-energizes the accessory hydraulic pump 94 output pressure (in P-14) returns to the 2 MPa relief valve setting.
- other settings and other types of valve manifolds may be used, without departing from the scope of this disclosure.
- a pump-pound condition can be detected by monitoring pressure of the hydraulic fluid 106 as sensed using the sensor 1-10.
- the pump-pound condition will be apparent from fluctuations in pressure sensed by the sensor 1-10.
- the valve rod bushing 25 strikes the valve rod guide 23 of the downhole pump 20
- this will cause an abrupt change in the rod string 18 displacement and the load exerted by the rod string, resulting in a corresponding abrupt change in the piston rod 54 and piston 52 displacement.
- Such abrupt displacement and load changes will, in turn, produce corresponding pressure changes in the hydraulic fluid 106 flowing from the hydraulic actuator 14 to the hydraulic pressure source 12.
- the control system 46 can be programmed to recognize hydraulic fluid pressure fluctuations that are characteristic of a pump-pound condition. For example, pressure fluctuations having a certain range of frequencies or amplitudes (or both) could be characteristic of a pump-pound condition, and if such frequencies or amplitudes are detected in the sensor 1-10 output, the control system 46 can cause certain actions to take place in response. The actions could include displaying an alert, sounding an alarm, recording an event record, transmitting an indication of the pump-pound condition to a remote location, initiating a routine to appropriately raise the lower stroke extent of the piston 52, etc.
- An action that may be automatically implemented by the control system 46 to raise the lower stroke extent of the piston 52 can include incrementally decreasing the volume of hydraulic fluid 106 returned to the hydraulic pressure source 12 from the hydraulic actuator 14 (e.g., by the control system 46 adjusting the swash plate of the primary hydraulic pump 92 to terminate reverse flow when the piston 52 has descended to the raised lower stroke extent), until the pump-pound condition is no longer detected. If pump-pound is detected on an upward stroke of the piston 52, then a similar set of actions can be initiated by the control system 46 to appropriately lower the upper stroke extent of the piston (e.g., by incrementally decreasing the volume of hydraulic fluid 106 pumped into the hydraulic actuator 14 when the piston 52 is stroked upwardly, until the pump-pound condition is no longer detected). As mentioned above, the upper and lower stroke extents could, in some examples, be adjusted by changing positions of the sensors 70 on the cylinder 50.
- pressure fluctuations that are characteristic of a pump-pound condition can change based on a variety of different factors, and the characteristics of pressure fluctuations indicative of a pump-pound condition are not necessarily the same from one well to another.
- a depth to the downhole pump 20 could affect the amplitude of the pressure fluctuations
- a density of the fluid 26 could affect the frequency of the pressure fluctuations. Therefore, it may be advantageous during the start-up operation to intentionally produce a pump-pound condition, in order to enable detection of pressure fluctuations that are characteristic of the pump-pound condition in that particular well, so that such characteristics can be stored in the control system 46 for use in detecting pump-pound conditions in that particular well.
- Pressure fluctuations are considered to be a type of vibration of the hydraulic fluid 106.
- acoustic sensor, geophone or seismometer e.g., a velocity sensor, motion sensor or accelerometer
- the sensor(s) 70 on the actuator 14 could include such sensors, or separate sensors could be used for such purpose if desired.
- a pump-pound condition can be detected by monitoring over time the pressure of the hydraulic fluid 106 as sensed using the sensor 1-10, and the displacement of the piston 52 as sensed using the sensor(s) 70.
- pressure of the hydraulic fluid 106 is directly related to the load or force transmitted between the hydraulic actuator 14 and the rod string 18. Force multiplied by displacement equals work. If a pump-off condition occurs, the total work performed during a reciprocation cycle will decrease due, for example, to gas intake to the pump 20 and/or to less fluid 26 being pumped to the surface.
- the control system 46 can detect whether a pump-off condition is occurring, and can make appropriate adjustments to mitigate the pump-off condition (such as, by decreasing a reciprocation speed of the hydraulic actuator 14, as discussed above). Such adjustments may be made automatically or manually (or both). Other actions (for example, displaying an alert, sounding an alarm, recording an event record, transmitting an indication of the pump-off condition to a remote location, etc.) may be performed by the control system 46 as an alternative to, or in addition to, the adjustments.
- FIGS. 8A & B examples of load versus displacement graphs for the system 10 are representatively illustrated.
- load or force transmitted between the hydraulic actuator 14 and the rod string 18 is directly related to hydraulic fluid pressure, and so the graphs could instead be drawn for pressure versus displacement, if desired.
- the scope of this disclosure is not limited to any particular technique for determining work performed by the hydraulic actuator 14.
- FIG. 8A A reciprocation cycle for the hydraulic actuator 14 is depicted in FIG. 8A without a pump-off condition.
- the force quickly increases as the hydraulic actuator 14 begins to raise the rod string 18, and then the force substantially levels off as the fluid 26 flows from the well (although in practice the force can decrease somewhat due to fluid 26 inertia effects and as less fluid is lifted near the end of the upward stroke).
- the force then quickly decreases as the hydraulic actuator 14 allows the rod string 18 to descend in the well, and then the force substantially levels off until an end of the downward stroke.
- the graph of FIG. 8A has a shape (e.g., generally parallelogram) that is indicative of a reciprocation cycle with no pump-off condition.
- a shape e.g., generally parallelogram
- the idealized parallelogram shape of the FIG. 8A graph will not be exactly produced, but the control system 46 can be programmed to recognize shapes that are indicative of reciprocation cycles with no pump-off condition.
- An area A 1 of the FIG. 8A graph is representative of the total work performed during this reciprocation cycle (e.g., including a summation of the work performed during the upward and downward strokes).
- the area A 1 can be readily calculated by the control system 46 for comparison to other areas of reciprocation cycles, either prior to or after the FIG. 8A reciprocation cycle.
- control system 46 can determine whether and how the work performed has changed. If the total work performed has changed, the control system 46 can make appropriate adjustments to certain parameters, in order to mitigate any undesired conditions, or to enhance any desired conditions.
- FIG. 8B the force versus displacement graph for another reciprocation cycle is depicted, in which a pump-off condition is occurring. Note that an area A 2 of the FIG. 8B graph is less than the area A 1 of the FIG. 8A graph. This indicates that less total work is performed in the FIG. 8B reciprocation cycle, as compared to the FIG. 8A reciprocation cycle.
- the control system 46 can recognize that less total work is being performed over time, and can make appropriate adjustments (such as, by reducing the reciprocation speed). Such adjustments can be made incrementally, with repeated comparisons of total work performed over time, so that the control system 46 can verify whether the adjustments are accomplishing intended results (e.g., increased total work performed over time, due to reduced pump-off).
- the control system 46 can recognize that more work is being performed over time and that, if incremental adjustments are being made, those incremental adjustments should continue. However, the control system 46 can discontinue the adjustments, for example, if other objectives (such as, operational efficiency, economy, etc.) would be reduced if the adjustments continue.
- the FIG. 8B graph has a shape that is not indicative of a reciprocation cycle in which a pump-off condition is not occurring. Stated differently, the shape of the FIG. 8B graph (for example, with a rounded upward slope, reduced maximum force on the upward stroke and one or more reductions in force during the upward stroke) is indicative of a pump-off condition.
- the control system 46 can be programmed to recognize such shapes, so that adjustments can be made to mitigate the pump-off condition.
- the control system can incrementally decrease the reciprocation speed if a pump-off condition is detected, until the shape of the force (or pressure) versus displacement graph for a reciprocation cycle does not indicate pump-off. If force (or pressure) versus displacement graphs initially do not indicate a pump-off condition, the control system 46 can incrementally increase the reciprocation speed (to thereby increase a rate of production), until the shape of the graph for a reciprocation cycle does begin to indicate pump-off, at which point the control system can incrementally decrease the reciprocation speed until the shape of the graph does not indicate pump-off. In this manner, production rate can be maximized, without any sustained pump-off condition.
- FIGS. 8A and 8B are visual illustrations of measured force or pressure with respect to measured displacement of the piston 52 and rod string 18. If automatic adjustment of any of the hydraulic actuator 14 operating parameters, e.g., reciprocation rate, maximum stroke extent, etc. are implemented by the control system 46, actual graphs may not be constructed or displayed; the control system 46 may detect the numerical or other equivalent of the "shape" of a graph by implementing suitable detection and control processes therein in response to measurements from any one or more of the various sensors described above.
- the seal assembly 78 includes multiple stacked seal cartridges 130 for providing effective redundant annular sealing about the piston rod 54.
- Labyrinth rings 132 are included at either end of the seal assembly 78 for excluding debris, and radial bearings 134 are positioned between the labyrinth rings and the seal cartridges 130 for maintaining consistent radial spacing between the seal assembly and the piston rod 54.
- a wiper ring 136 may be included in the seal assembly 78 above the seal cartridges 130 for maintaining the lubricant 86 (see FIG. 4 ) in the annular chamber 82.
- the labyrinth rings 132 may comprise single-turn or multiple-turn rings that contact and slidingly engage the piston rod 54. Whether single-turn or multiple-turn rings are used, preferably each labyrinth ring 132 comprises multiple stacked ring layers to provide a labyrinthine path for any debris to negotiate in order to traverse the labyrinth ring.
- the labyrinth rings 132 also effectively scrape debris and films from an exterior surface of the piston rod 54, thereby preventing such substances from interfering with sealing engagement between the seal cartridges 130 and the piston rod exterior surface.
- Suitable labyrinth rings for use in the seal assembly 78 are the Laminar Seal Rings available from the Smalley Steel Ring Company of Lake Zurich, Illinois USA.
- the radial bearings 134 are precisely dimensioned to evenly space apart the seal assembly 78 from the piston rod 54.
- the radial bearings 134 are tough, durable and have relatively low sliding friction against the exterior surface of the piston rod 54.
- a suitable material for use in the radial bearings 134 is poly-ether-ether-ketone (PEEK), optionally combined with other material to provide, for example, enhanced abrasion resistance, reduced friction, increased strength, etc.
- the wiper ring 136 is not necessarily configured for sealing against a substantial pressure differential, but is mainly used for providing isolation between the lubricant 86 in the annular chamber 82, and fluid, grease, etc., exposed to the seal cartridges 130.
- Suitable materials for the wiper ring 136 include nitrile and fluorocarbon rubber.
- the seals 138 are static annular seals between the seal assembly 78 and the annular seal housing 44.
- the seals 138 may be, for example, O-rings made of nitrile or fluorocarbon rubber.
- the debris excluder 140 is configured for preventing debris from entering an annular space between the seal assembly 78 and the annular seal housing.
- Suitable materials for the wiper ring 136 include nitrile and fluorocarbon rubber.
- each seal cartridge 130 includes a separate seal carrier 142 on which both an internal dynamic seal 144 and an external static seal 146 are mounted.
- the seal carrier 142 is preferably made of a substantially rigid material, such as steel or another metal or metal alloy.
- the rigidity of the seal carrier 142 provides structural isolation between the seals 144, 146 of adjacent seal cartridges 130, so that each seal cartridge operates independently of the other seal cartridges.
- the dynamic seal 144 is positioned in an annular recess 148 formed in the seal carrier 142.
- the dynamic seal 144 slidingly and sealingly engages the exterior surface of the piston rod 54, and also sealingly engages the seal carrier 142 in the recess 148. Since the piston rod 54 displaces relative to the dynamic seal 144 as the dynamic seal seals against the piston rod, the dynamic seal is preferably made of a tough, durable and relatively low sliding friction material, such as poly-ether-ether-ketone (PEEK).
- PEEK poly-ether-ether-ketone
- the static seal 146 is positioned in an annular recess 150 formed on the seal carrier 142.
- the static seal 146 seals between the seal carrier 142 and a housing 152 of the seal assembly 78 (see FIG. 9 ).
- the static seal 146 may be an O-ring, and may be made of a suitable material, such as nitrile or fluorocarbon rubber.
- seal assembly 78 Although certain seal configurations and materials have been described above for the seal assembly 78, these are just examples of a wide variety of possible configurations and materials that may be used for the seal assembly. Therefore, the scope of this disclosure is not limited to any particular seal configuration, number or combination of seals, or seal materials.
- the system 10 can comprise a hydraulic actuator 14 including a piston rod 54 that displaces in response to pressure in the hydraulic actuator, a first seal assembly 66 that seals about the piston rod 54 and is exposed to the pressure in the hydraulic actuator 14, and a second seal assembly 78 that seals about the piston rod 54 and is exposed to pressure in the well.
- the second seal assembly 78 can include multiple separate seal cartridges 130, each of the seal cartridges including a dynamic seal 144 that slidingly and sealingly engages the piston rod 54.
- Each of the seal cartridges 130 can include a static seal 146 that sealingly engages a housing 152 of the second seal assembly 78.
- Each of the seal cartridges 130 can include a seal carrier 142 that structurally isolates the dynamic seals 144 of adjacent seal cartridges 130 from each other.
- the second seal assembly 78 can include a labyrinth ring 132 comprising multiple ring layers.
- the system 10 can include a lubricant injector 80 that delivers a pressurized lubricant 86 to a space between the first and second seal assemblies 66, 78.
- the piston rod 54 may be entirely isolated from atmosphere between the first and second seal assemblies 66, 78.
- the second seal assembly 78 may be positioned in an annular seal housing 44. Disconnection of the hydraulic actuator 14 from the annular seal housing 44 can provide access to the second seal assembly 78.
- a hydraulic pump 92 may be connected between the hydraulic actuator 14 and an accumulator 116.
- a hydraulic fluid 106 may be in contact with a pressurized gas 118 in the accumulator 116.
- Pressure in the accumulator 116 can be automatically regulated in response to measurements of pressure applied to the hydraulic actuator 14.
- An extent of reciprocation displacement of the piston rod 54 may be automatically varied in response to a measured vibration.
- the system 10 can comprise a hydraulic actuator 14 including a piston rod 54 that displaces in response to pressure in the hydraulic actuator, a first seal assembly 66 that seals about the piston rod 54 and is exposed to the pressure in the hydraulic actuator 14, and a second seal assembly 78 that seals about the piston rod 54 and is exposed to pressure in the well.
- the second seal assembly 78 includes a labyrinth ring 132 comprising multiple ring layers.
Description
- This disclosure relates generally to equipment utilized and operations performed in conjunction with a subterranean well and, in one example described below, more particularly provides a hydraulic pumping system, such as a hydraulic pumping system with enhanced piston rod sealing.
- Reservoir fluids can sometimes flow to the earth's surface when a well has been completed. However, with some wells, reservoir pressure may be insufficient (at the time of well completion or thereafter) to lift the fluids (in particular, liquids) to the surface. In those circumstances, technology known as "artificial lift" can be employed to bring the fluids to the surface (or other desired location, such as a subsea production facility or pipeline, etc.).
- Various types of artificial lift technology are known to those skilled in the art. In one type of artificial lift, a downhole pump is operated by reciprocating a string of "sucker" rods deployed in a well. An apparatus (such as, a walking beam-type pump jack or a hydraulic actuator) located at the surface can be used to reciprocate the rod string.
- The inventors have appreciated that improvements are continually needed in the arts of constructing and operating artificial lift systems. Such improvements may be useful for lifting oil, water, gas condensate or other liquids from wells, may be useful with various types of wells (such as, gas production wells, oil production wells, water or steam flooded oil wells, geothermal wells, etc.), and may be useful for any other application where reciprocating motion is desired.
-
US8066496B2 describes a reciprocated pump positioned at the lower end of a string of tubing in a bore hole that provides a passageway for moving formation fluid to the earth's surface.CA2515616A1 describes a convertible rotary seal with a housing for receiving a polish rod.CA2288479A1 describes a downhole rotary pumping arrangement with drivehead gimbals and seals. T.A. Everitt et al "An Improved Finite-Difference Calculation of Downhole Dynamometer Cards for Sucker-Rod Pumps" SPE Production Engineering, vol. 8, no. 01, 1 February 1992 (1992-02-01), pages 121-127 describes a finite-difference representation of the wave equation for diagnostic analyses of sucker-rod pumping systems.CA2436924A1 describes a flexibly mounted standpipe in various configurations.US2014/231093 A1 proposes a hydraulic oil well pumping system.US5209495 A proposes a combination stuffing box and pressure transmitter system.WO 2009/097338 A2 proposes a hydraulic oil well pumping apparatus. - Aspects of the invention are set out in the accompanying claims.
-
-
FIG. 1 is a representative partially cross-sectional view of an example of a hydraulic pumping system and associated method which can embody principles of this disclosure. -
FIG. 2 is a representative cross-sectional view of an example of a hydraulic actuator that may be used in the system and method ofFIG. 1 . -
FIG. 3 is a representative cross-sectional view of an example piston position sensing technique that may be used in the system and method ofFIG. 1 . -
FIG. 4 is a representative cross-sectional view of an example lower portion of the hydraulic actuator and an annular seal housing. -
FIG. 5 is a representative top view of an example of a hydraulic pressure source that may be used in the system and method ofFIG. 1 . -
FIG. 6 is a representative diagram of an example of a gas balancing assembly that may be used in the system and method ofFIG. 1 . -
FIG. 7 is an example process and instrumentation diagram for the hydraulic pressure source ofFIG. 5 . -
FIGS. 8A & B are representative examples of load versus displacement graphs for the system and method ofFIG. 1 . -
FIG. 9 is an enlarged scale representative cross-sectional view of an example of a seal assembly that may be used with the hydraulic pumping system and associated method. -
FIG. 10 is a further enlarged scale representative cross-sectional view of a seal cartridge of theFIG. 9 seal assembly. - Representatively illustrated in
FIG. 1 is ahydraulic pumping system 10 and associated method for use with a subterranean well, which system and method can embody principles of this disclosure. However, it should be clearly understood that thehydraulic pumping system 10 and method are merely one example of an application of the principles of this disclosure in practice, and a wide variety of other examples are possible. Therefore, the scope of this disclosure is not limited at all to the details of thesystem 10 and method as described herein or depicted in the drawings. - In the
FIG. 1 example, ahydraulic pressure source 12 is used to apply hydraulic pressure to, and exchange hydraulic fluid with, ahydraulic actuator 14 mounted on awellhead 16. In response, thehydraulic actuator 14 reciprocates arod string 18 extending into the well, thereby operating adownhole pump 20. - The
rod string 18 may be made up of individual sucker rods connected to each other, although other types of rods or tubes may be used, therod string 18 may be continuous or segmented, a material of therod string 18 may comprise steel, composites or other materials, and elements other than rods may be included in the string. Thus, the scope of this disclosure is not limited to use of any particular type of rod string, or to use of a rod string at all. It is only necessary for purposes of this disclosure to communicate reciprocating motion of thehydraulic actuator 14 to thedownhole pump 20, and it is therefore within the scope of this disclosure to use any structure capable of such transmission. - The
downhole pump 20 is depicted inFIG. 1 as being of the type having a stationary or "standing"valve 22 and a reciprocating or "traveling"valve 24. Thetraveling valve 24 is connected to, and reciprocates with, therod string 18, so thatfluid 26 is pumped from a wellbore 28 into aproduction tubing string 30. However, it should be clearly understood that thedownhole pump 20 is merely one example of a wide variety of different types of pumps that may be used with thehydraulic pumping system 10 and method ofFIG. 1 , and so the scope of this disclosure is not limited to any of the details of the downhole pump described herein or depicted in the drawings. - The wellbore 28 is depicted in
FIG. 1 as being generally vertical, and as being lined withcasing 32 and cement 34. In other examples, a section of the wellbore 28 in which thepump 20 is disposed may be generally horizontal or otherwise inclined at any angle relative to vertical, and the wellbore section may not be cased or may not be cemented. Thus, the scope of this disclosure is not limited to use of thehydraulic pumping system 10 and method with any particular wellbore configuration. - In the
FIG. 1 example, thefluid 26 originates from anearth formation 36 penetrated by the wellbore 28. Thefluid 26 flows into the wellbore 28 viaperforations 38 extending through thecasing 32 and cement 34. Thefluid 26 can be a liquid, such as oil, gas condensate, water, etc. However, the scope of this disclosure is not limited to use of thehydraulic pumping system 10 and method with any particular type of fluid, or to any particular origin of the fluid. - As depicted in
FIG. 1 , thecasing 32 and theproduction tubing string 30 extend upward to thewellhead 16 at or near the earth's surface 40 (such as, at a land-based wellsite, a subsea production facility, a floating rig, etc.). Theproduction tubing string 30 can be hung off in thewellhead 16, for example, using a tubing hanger (not shown). Although only a single string of thecasing 32 is illustrated inFIG. 1 for clarity, in practice multiple casing strings and optionally one or more liner (a liner string being a pipe that extends from a selected depth in the wellbore 28 to a shallower depth, typically sealingly "hung off" inside another pipe or casing) strings may be installed in the well. - In the
FIG. 1 example, a rodblowout preventer stack 42 and anannular seal housing 44 are connected between thehydraulic actuator 14 and thewellhead 16. The rodblowout preventer stack 42 includes various types of blowout preventers (BOP's) configured for use with therod string 18. For example, one blowout preventer can prevent flow through theblowout preventer stack 42 when therod string 18 is not present therein, and another blowout preventer can prevent flow through theblowout preventer stack 42 when therod string 18 is present therein. However, the scope of this disclosure is not limited to use of any particular type or configuration of blowout preventer stack with thehydraulic pumping system 10 and method ofFIG. 1 . - The
annular seal housing 44 includes an annular seal (described more fully below) about a piston rod of thehydraulic actuator 14. The piston rod (also described more fully below) connects to therod string 18 below the annular seal,. - The
hydraulic pressure source 12 may be connected directly to thehydraulic actuator 14, or it may be positioned remotely from thehydraulic actuator 14 and connected with, for example, suitable hydraulic hoses or pipes. Operation of thehydraulic pressure source 12 is controlled by acontrol system 46. - The
control system 46 may allow for manual or automatic operation of thehydraulic pressure source 12, based on operator inputs and measurements taken by various sensors. Thecontrol system 46 may be separate from, or incorporated into, thehydraulic pressure source 12. In one example, at least part of thecontrol system 46 could be remotely located or web-based, with two-way communication between thehydraulic pressure source 12 and thecontrol system 46 being via, for example, satellite, wireless or wired transmission. - The
control system 46 can include various components, such as a programmable controller, input devices (e.g., a keyboard, a touchpad, a data port, etc.), output devices (e.g., a monitor, a printer, a recorder, a data port, indicator lights, alert or alarm devices, etc.), a processor, software (e.g., an automation program, customized programs or routines, etc.) or any other components suitable for use in controlling operation of thehydraulic pressure source 12. The scope of this disclosure is not limited to any particular type or configuration of a control system. - In operation of the
hydraulic pumping system 10 ofFIG. 1 , thecontrol system 46 causes thehydraulic pressure source 12 to increase pressure applied to the hydraulic actuator 14 (delivering a volume of hydraulic fluid into the hydraulic actuator), in order to raise therod string 18. Conversely, thehydraulic pressure source 12 receives a volume of hydraulic fluid from the hydraulic actuator 14 (thereby decreasing pressure applied to the hydraulic actuator), in order to allow therod string 18 to descend. Thus, by alternately increasing and decreasing pressure in thehydraulic actuator 14, therod string 18 is reciprocated, thedownhole pump 20 is actuated and the fluid 26 is pumped out of the well. - Note that, when pressure in the
hydraulic actuator 14 is decreased to allow therod string 18 to displace downward (as viewed inFIG. 1 ), the pressure is not decreased to zero gauge pressure (e.g., atmospheric pressure). Instead, a "balance" pressure is maintained in thehydraulic actuator 14 to nominally offset a load due to therod string 18 being suspended in the well (e.g., a weight of the rod string, taking account of buoyancy, inclination of the wellbore 28, friction, well pressure, etc.). - In this manner, the
hydraulic pressure source 12 is not required to increase pressure in thehydraulic actuator 14 from zero to that necessary to displace therod string 18 upwardly (along with the displaced fluid 26), and then reduce the pressure back to zero, for each reciprocation of therod string 18. Instead, thehydraulic pressure source 12 only has to increase pressure in thehydraulic actuator 14 sufficiently greater than the balance pressure to displace therod string 18 to its upper stroke extent, and then reduce the pressure in thehydraulic actuator 14 back to the balance pressure to allow therod string 18 to displace back to its lower stroke extent. - Note that it is not necessary for the balance pressure in the
hydraulic actuator 14 to exactly offset the load exerted by therod string 18. In some examples, it may be advantageous for the balance pressure to be somewhat less than that needed to offset the load exerted by therod string 18. In addition, it can be advantageous in some examples for the balance pressure to change over time. Thus, the scope of this disclosure is not limited to use of any particular or fixed balance pressure, or to any particular relationship between the balance pressure, any other force or pressure and/or time. - A reciprocation speed of the
rod string 18 will affect a flow rate of the fluid 26. Generally speaking, the faster the reciprocation speed at a given length of stroke of therod string 18, the greater the flow rate of the fluid 26 from the well (to a point). - It can be advantageous to control the reciprocation speed, instead of reciprocating the
rod string 18 as fast as possible. For example, afluid interface 48 in the wellbore 28 can be affected by the flow rate of the fluid 26 from the well. Thefluid interface 48 could be an interface between oil and water, gas and water, gas and gas condensate, gas and oil, steam and water, or any other fluids or combination of fluids. - If the flow rate is too great, the
fluid interface 48 may descend in the wellbore 28, so that eventually thepump 20 will no longer be able to pump the fluid 26 (a condition known to those skilled in the art as "pump-off"). On the other hand, it is typically desirable for the flow rate of the fluid 26 to be at a maximum level that does not result in pump-off. In addition, a desired flow rate of the fluid 26 may change over time (for example, due to depletion of a reservoir, changed offset well conditions, water or steam flooding characteristics, etc.). - A "gas-locked"
downhole pump 20 can result from a pump-off condition, whereby gas is received into thedownhole pump 20. The gas is alternately expanded and compressed in thedownhole pump 20 as the travelingvalve 24 reciprocates, but the fluid 26 cannot flow into thedownhole pump 20, due to the gas therein. - In the
FIG. 1 hydraulic pumping system 10 and method, thecontrol system 46 can automatically control operation of thehydraulic pressure source 12 to regulate the reciprocation speed, so that pump-off is avoided, while achieving any of various desirable objectives. Those objectives may include maximum flow rate of the fluid 26, optimized rate of electrical power consumption, reduction of peak electrical loading, etc. However, it should be clearly understood that the scope of this disclosure is not limited to pursuing or achieving any particular objective or combination of objectives via automatic reciprocation speed regulation by thecontrol system 46. - As mentioned above, the
hydraulic pressure source 12 controls pressure in thehydraulic actuator 14, so that therod string 18 is displaced alternately to its upper and lower stroke extents. These extents do not necessarily correspond to maximum possible upper and lower displacement limits of therod string 18 or thepump 20. - For example, it is typically undesirable for a
valve rod bushing 25 above the travelingvalve 24 to impact avalve rod guide 23 above the standingvalve 22 when therod string 18 displaces downwardly (a condition known to those skilled in the art as "pump-pound"). Thus, it is preferred that therod string 18 be displaced downwardly only until thevalve rod bushing 25 is near its maximum possible lower displacement limit, so that it does not impact thevalve rod guide 23. - On the other hand, the longer the stroke distance (without impact), the greater the productivity and efficiency of the pumping operation (within practical limits), and the greater the compression of fluid between the standing and traveling
valves 22, 24 (e.g., to avoid gas-lock). In addition, a desired stroke of therod string 18 may change over time (for example, due to gradual lengthening of therod string 18 as a result of lowering of a liquid level (such as at fluid interface 48) in the well, etc.). - In the
FIG. 1 hydraulic pumping system 10 and method, thecontrol system 46 can automatically control operation of thehydraulic pressure source 12 to regulate the upper and lower stroke extents of therod string 18, so that pump-pound is avoided, while achieving any of various desirable objectives. Those objectives may include maximizing rod string stroke length, maximizing production, minimizing electrical power consumption rate, minimizing peak electrical loading, etc. However, it should be clearly understood that the scope of this disclosure is not limited to pursuing or achieving any particular objective or combination of objectives via automatic stroke extent regulation by thecontrol system 46. - Referring additionally now to
FIG. 2 , an enlarged scale cross-sectional view of an example of thehydraulic actuator 14 as used in thehydraulic pumping system 10 is representatively illustrated. Note that thehydraulic actuator 14 ofFIG. 2 may be used with other systems and methods, in keeping with the principles of this disclosure. - As depicted in
FIG. 2 , thehydraulic actuator 14 includes a generallytubular cylinder 50, apiston 52 sealingly and reciprocably disposed in thecylinder 50, and apiston rod 54 connected to thepiston 52. Thepiston 52 andpiston rod 54 displace relative to thecylinder 50 in response to a pressure differential applied across thepiston 52. - Hydraulic fluid and pressure are communicated between the
hydraulic pressure source 12 and anannular chamber 56 in thecylinder 50 below thepiston 52 via aport 58. Avent valve 60 is connected via atubing 62 to anupper chamber 64 above thepiston 52. Theupper chamber 64 is maintained at substantially atmospheric pressure (zero gauge pressure), and pressure in theannular chamber 56 is controlled by thehydraulic pressure source 12, in order to control displacement of thepiston 52 and piston rod 54 (and therod string 18 connected thereto). - Note that, in this example, an
annular seal assembly 66 is sealingly received in alower flange 68 of thehydraulic actuator 14. Theannular seal assembly 66 also sealingly engages an outer surface of thepiston rod 54. Thus, a lower end of theannular chamber 56 is sealed off by theannular seal assembly 66. - In
FIG. 2 , thepiston 52 is at a maximum possible upper limit of displacement. However, during a pumping operation, thepiston 52 may not be displaced to this maximum possible upper limit of displacement. For example, as discussed above, an upper stroke extent of therod string 18 may be regulated to achieve various objectives. - Similarly, during a pumping operation, the
piston 52 also may not be displaced to a maximum possible lower limit of displacement. As described more fully below, upper and lower extents of displacement of thepiston 52 androd 54 can be varied to produce corresponding changes in the upper and lower stroke extents of therod string 18, in order to achieve various objectives (such as, preventing pump-off, preventing pump-pound, optimizing pumping efficiency, reducing peak electrical loading, etc.). - Referring additionally now to
FIG. 3 , a further enlarged scale cross-sectional view of an upper portion of thehydraulic actuator 14 is representatively illustrated. This view is rotated somewhat about a vertical axis of the hydraulic actuator 14 (as compared toFIG. 2 ), so that asensor 70, for example, a magnetic field sensor, is visible inFIG. 3 . - The
sensor 70 is secured to an outer surface of the cylinder 50 (for example, using a band clamp). In other examples, thesensor 70 could be bonded, threaded or otherwise attached to thecylinder 50, or could be incorporated into the cylinder or another component of thehydraulic actuator 14. - In some examples, a position of the
sensor 70 relative to thecylinder 50 can be adjustable. Thesensor 70 could be movable longitudinally along thecylinder 50, for example, via a threaded rod or another type of linear actuator. - A suitable magnetic field sensor is a Pepperl MB-F32-A2 magnetic flux sensing switch marketed by Pepperl+Fuchs North America of Twinsburg, Ohio USA. However, other magnetic field sensors may be used in keeping with the principles of this disclosure.
- The sensor 70 (when a magnetic field sensor is used) is capable of sensing a presence of a
magnet 72 through awall 74 of thecylinder 50. Themagnet 72 is secured to, and displaces with, thepiston 52. In some examples, thesensor 70 can sense the presence of themagnet 72, even though thewall 74 comprises a ferromagnetic material (such as steel), and even though the wall is relatively thick (such as, approximately 1.27 cm or greater thickness). - A suitable magnet for use in the
actuator 14 is a neodymium magnet (such as, a neodymium-iron-boron magnet) in ring form. However, other types and shapes of magnets may be used in keeping with the principles of this disclosure. - Although only one
sensor 70 is visible inFIG. 3 , it is contemplated that any number of sensors could be used with thehydraulic actuator 14. Thesensors 70 could be distributed in a variety of different manners along the cylinder 50 (e.g., linearly, helically, evenly spaced, unevenly spaced, etc.). - In the
FIG. 3 example, an output of thesensor 70 is communicated to thecontrol system 46, so that a position of thepiston 52 at any given point in the pumping operation is determinable. As the number ofsensors 70 is increased, determination of the position of thepiston 52 at any given point in the pumping operation can become more accurate. - For example, two of the
sensors 70 could be positioned on thecylinder 50, with one sensor at a position corresponding to an upper stroke extent of thepiston 52 andmagnet 72, and the other sensor at a position corresponding to a lower stroke extent of the piston and magnet. When asensor 70 detects that thepiston 52 andmagnet 72 have displaced to the corresponding stroke extent (by sensing the proximate presence of the magnet 72), thecontrol system 46 appropriately reverses the stroke direction of thepiston 52 by operation of hydraulic components to be described further below. In this example, the upper and lower stroke extents of thepiston 52 can be conveniently varied by adjusting the longitudinal positions of thesensors 70 on thecylinder 50. - Referring additionally now to
FIG. 4 , a cross-sectional view of a lower portion of thehydraulic actuator 14, theannular seal housing 44 and an upper flange of theBOP stack 42 is representatively illustrated. In this view, a threadedconnection 76 between thepiston rod 54 and therod string 18 can be seen in theannular seal housing 44 below anannular seal assembly 78. - The
annular seal assembly 78 seals off an annular space between the exterior surface of thepiston rod 54 and an interior surface of theannular seal housing 44. Theannular seal assembly 78 is similar in some respects to theannular seal assembly 66 in thehydraulic actuator 14, but theannular seal assembly 78 shown inFIG. 4 is exposed to pressure in the well (when the rod BOP's are not actuated), whereas the annular seal assembly (66 inFIG. 3 ) is exposed to pressure in the annular chamber (56 inFIG. 3 ) of thehydraulic actuator 14. - A
lubricant injector 80 slowly pumps grease or anotherlubricant 86 into anannular chamber 82 formed in thelower flange 68 of thehydraulic actuator 14 and anupper flange 84 of theannular seal housing 44. Thelubricant 86 flows out of theannular chamber 82 to areservoir 88. In one example, thelubricant 86 could be sourced from the hydraulic fluid in the annular chamber (56 inFIG. 3 ) or the hydraulic pressure source (12 inFIG. 1 ). - An advantage of having the
lubricant 86 flow through theannular chamber 82 is that, if well fluid leaks past theannular seal assembly 78, or if hydraulic fluid leaks past the annular seal assembly (66 inFIG. 3 ), it will be apparent in the lubricant delivered to thereservoir 88. However, it is not necessary for thelubricant injector 80 to deliverpressurized lubricant 86 into theannular chamber 82 in keeping with the scope of this disclosure. For example, thelubricant 86 could instead be delivered from an unpressurized reservoir by gravity flow, etc. - An advantage of having the
annular seal assemblies flanges flanges 68, 84 (for example, when thehydraulic actuator 14 is removed from theannular seal housing 44 for periodic maintenance). However, it should be clearly understood that the scope of this disclosure is not limited to pursuing or achieving any particular advantage, objective or combination of objectives by thehydraulic pumping system 10,hydraulic actuator 14,hydraulic pressure source 12 orannular seal housing 44. - Referring additionally now to
FIG. 5 , a top view of an example of thehydraulic pressure source 12 is representatively illustrated. In this view, a top cover of thehydraulic pressure source 12 is not illustrated, so that internal components of thehydraulic pressure source 12 are visible. - In the
FIG. 5 example, thehydraulic pressure source 12 includes aprime mover 90, a primaryhydraulic pump 92, an accessoryhydraulic pump 94, ahydraulic fluid reservoir 96, a hydraulicfluid heat radiator 98 withfan 100, anitrogen concentrator assembly 102, and agas balancing assembly 104. Thecontrol system 46 is included with thehydraulic pressure source 12 in this example. - The
prime mover 90 can be a fixed or variable speed electric motor (or any other suitable type of motor or engine). Preferably, thecontrol system 46 controls operation of theprime mover 90 in an efficient manner that minimizes a cost of supplying electricity or fuel to theprime mover 90. This efficient manner may vary, depending on, for example, how a local electric utility company charges for electrical service (e.g., by peak load or by kilowatt hours used). Instead of an electric motor, theprime mover 90 could in other examples be an internal combustion engine, a turbine or positive displacement motor rotated by flow of gas from the well, or any other type of engine or motor. The type of prime mover is not in any way intended to limit the scope of this disclosure. - The primary
hydraulic pump 92 is driven by theprime mover 90 and supplieshydraulic fluid 106 under pressure from thegas balancing assembly 104 to thehydraulic actuator 14, in order to raise the piston 52 (andpiston rod 54 and rod string 18). Afilter 108 filters thehydraulic fluid 106 that flows from thehydraulic actuator 14 to the primary hydraulic pump 92 (flow from the pump to the actuator bypasses the filter). - When the piston 52 (and
piston rod 54 and rod string 18) descends, thehydraulic fluid 106 flows back through the primaryhydraulic pump 92 to thegas balancing assembly 104. In some examples, this "reverse" flow of thehydraulic fluid 106 can cause a rotor in theprime mover 90 to rotate "backward" and thereby generate electrical power. In such examples, this generated electrical power may be used to offset a portion of the electrical power consumed by theprime mover 90, in order to reduce the cost of supplying electricity to the prime mover. However, the scope of this disclosure is not limited to generation of electrical power by reverse flow of thehydraulic fluid 106 through the primaryhydraulic pump 92. - The accessory
hydraulic pump 94 can be used to initially charge thegas balancing assembly 104 with thehydraulic fluid 106 and circulate thehydraulic fluid 106 through theradiator 98. Thenitrogen concentrator assembly 102 is used to produce pressurized and concentrated nitrogen gas by removal of oxygen from air (that is, non-cryogenically). In other examples, cryogenic nitrogen or another inert gas source could be used instead of, or in addition to, thenitrogen concentrator assembly 102. - The
nitrogen concentrator assembly 102 pressurizes thegas balancing assembly 104 and thereby causes the balance pressure discussed above to be applied to thehydraulic actuator 14. The balance pressure can be varied by control of thenitrogen concentrator assembly 102 by thecontrol system 46. As described more fully below, thecontrol system 46 controls operation of thenitrogen concentrator assembly 102 in response to various operator inputs and sensor measurements. - Referring additionally now to
FIG. 6 , a schematic view of an example of thegas balancing assembly 104 is representatively illustrated with thenitrogen concentrator assembly 102. In this view, it may be seen that thegas balancing assembly 104 includes one ormore gas volumes 110 that receive pressurized nitrogen from thenitrogen concentrator assembly 102. Thenitrogen concentrator assembly 102 includes amembrane filter 112 and acompressor 114 in this example. - A total volume of the
gas volumes 110 can be varied, depending on well conditions, anticipated pressures, a stroke length and piston area of the piston (52 inFIG. 3 ), etc. Although threegas volumes 110 are depicted inFIG. 6 , any number of gas volumes may be used, as desired. - The
gas balancing assembly 104 also includes anaccumulator 116 connected to thegas volumes 110. Thus, in this example, an upper portion of theaccumulator 116 has the pressurizednitrogen gas 118 therein. In other examples, thegas volumes 110 could be combined with theaccumulator 116. - A lower portion of the
accumulator 116 has thehydraulic fluid 106 therein. Thus, theaccumulator 116 is of the type known to those skilled in the art as a "gas over liquid" accumulator. However, in this example, there is no barrier (such as, a bladder or piston) separating thenitrogen gas 118 from thehydraulic fluid 106 in theaccumulator 116. Thus, thehydraulic fluid 106 is in direct contact with thenitrogen gas 118 in theaccumulator 116, and maintenance requirements for theaccumulator 116 are reduced or eliminated (due at least to the absence of a barrier between thenitrogen gas 118 and the hydraulic fluid 106). - A suitable hydraulic fluid for use in the
accumulator 116 in direct contact with thenitrogen gas 118 is a polyalkylene glycol (PAG) synthetic oil, such as SYNLUBE P12 marketed by American Chemical Technologies, Inc. of Fowlerville, Michigan USA. However, other enhancements thereof and other hydraulic fluids may be used without departing from the scope of this disclosure. - The
compressor 114 pressurizes thenitrogen gas 118, and this pressure is applied to thehydraulic fluid 106 in theaccumulator 116. A valve 120 (such as, a pilot operated control valve) selectively permits and prevents flow of thehydraulic fluid 106 between theaccumulator 116 and the primaryhydraulic pump 92. Thevalve 120 is open while thehydraulic pressure source 12 is being used to reciprocate the rod string 18 (thereby allowing thehydraulic fluid 106 to flow back and forth between theaccumulator 116 and the hydraulic actuator 14), and is otherwise normally closed. Thecontrol system 46 can control operation of thevalve 120. - One or more
liquid level sensors 122 on theaccumulator 116 detect whether a level of thehydraulic fluid 106 is at upper or lower limits. Thehydraulic fluid 106 level typically should not (although at times it may) rise above the upper limit when the piston (52 inFIG. 3 ) displaces to its lower stroke extent in the cylinder (50 inFIG. 3 ) and triggers a sensor (70 inFIG. 3 ), and thehydraulic fluid 106 level typically should not (although at times it may) fall below the lower limit when the piston (52 inFIG. 3 ) rises to its upper stroke extent and triggers a sensor (70 inFIG. 3 ). - A suitable liquid level sensor for use on the
accumulator 116 is an electro-optic level switch model no. ELS-1150XP marketed by Gems Sensors & Controls of Plainville, Connecticut USA. However, other types of sensors may be used in keeping with the scope of this disclosure. - The
liquid level sensors 122 are connected to thecontrol system 46, which can increase thehydraulic fluid 106 level by operation of the accessoryhydraulic pump 94. Typically, a decrease inhydraulic fluid 106 level is constantly occurring via a lubrication case drain of the primaryhydraulic pump 92 and other seals of thehydraulic pressure source 12 andhydraulic actuator 14, with thishydraulic fluid 106 being directed back to theradiator 98 andhydraulic fluid reservoir 96. Although twoliquid level sensors 122 are depicted inFIG. 6 , any number of liquid level sensors (or a single continuous sensor) may be used, as may be desired. - Referring additionally now to
FIG. 7 , an example process and instrumentation diagram for thehydraulic pressure source 12 is representatively illustrated. Various components of thehydraulic pressure source 12 are indicated in the diagram using the following symbols in the table below labeled "Equipment." -
E-1 N2 Volume Bottle (110) E-2 N2 Volume Bottle (110) E-3 N2 Volume Bottle (110) E-4 Accumulator (116) E-5 Hydraulic Fluid Vessel E-6 Prime Mover (90) E-7 Primary Hydraulic Pump (92) E-8 Accessory Hydraulic Pump (94) E-9 Radiator (98) E-10 Hydraulic Fluid Reservoir (96) E-11 N2 Membrane Filter (112) E-12 Air Particle Filter (1st stage) E-13 Air Particle Filter (2nd stage) E-14 Air Carbon Filter E-15 Air Compressor E-16 N2 Booster Compressor (15:1) (114) E-17 Hydraulic Fluid Filter E-18 Fan E-19 Air Cooler -
V-1 Pilot Operated Control Valve V-1 (120) V-2 Solenoid Valve (for actuation of V-1) V-3 Charge Shunt Valve V-4 Safety Relief Valve V-5 Pressure Reducing Valve V-6 Reverse Flow Check Valve V-7 Reverse Flow Check Valve -
I-1 Fluid Level Sensor for Hydraulic Fluid Reservoir E-10 (96) I-2 Temperature Sensor for Hydraulic Fluid Reservoir E-10 (96) I-3 N2 Pressure Sensor I-4 Magnetic Field Sensor(s) (70) on Cylinder (50) I-5 Control System (46) I-6 Accumulator E-4 (116) High Fluid Level Sensor (122) I-7 Accumulator E-4 (116) Low Fluid Level Sensor (122) I-8 Temperature Sensor on Primary Pump E-7 (92) Outlet I-9 Pressure Sensor on Primary Hydraulic Pump E-7 (92) Accumulator Side (to prevent cavitation) I-10 Pressure Sensor on Primary Hydraulic Pump E-7 (92) Outlet (to Cylinder 50) -
P-1 Flow to/from Primary Hydraulic Pump E-7 (92) and Cylinder 50 P-2 Flow from Control Valve V-1 (120) to Primary Pump E-7 (92) P-3 Flow from Hydraulic Fluid Vessel E-5 to Control Valve V-1 (120) P-4 Flow from Accumulator E-4 (116) to Hydraulic Vessel E-5 P-5 Flow to/from N2 Volume Bottle E-3 (110) and Accumulator E-4 (116) P-6 Flow to/from N2 Volume Bottles E-2,3 (110) P-7 Flow to/from N2 Volume Bottles E-1,2 (110) P-8 N2 Flow from Compressor E-16 to N2 Volume Bottle E-1 (110) P-9 Flow from Air Cooler E-19 to Air Particle Filter E-12 P-10 Flow from Air Compressor E-15 to Air Cooler E-19 P-11 Flow from Air Particle Filters E-12,13 to Air Carbon Filter E-14 P-12 Flow from Air Carbon Filter E-14 to N2 Membrane Filter E-11 (112) P-13 Flow from N2 Membrane Filter E-11 (112) to N2 Booster Compressor E-16 P-14 Flow from Accessory Hydraulic Pump E-8 (94) to Valve Manifold V-2/3/4 P-15 Flow from Valve V-2 to actuate Control Valve V-1 (120) P-16 Flow from Primary Hydraulic Pump E-7 (92) case drain and controls to Radiator E-9 (98) P-17 Flow from Valve Manifold V-2/3/4 to Radiator E-9 (98) P-18 Flow from Cylinder Vent Valve (60) to Reservoir E-10 (96) P-19 Flow from Air Compressor E-15 to N2 Booster Compressor E-16 P-20 Flow From Radiator E-9 (98) to Hydraulic Fluid Reservoir E-10 (96) - Note that the scope of this disclosure is not limited to any specific details of the
hydraulic pressure source 12, or any of the components thereof, as described herein or depicted in the drawings. For example, although the nitrogen booster compressor E-16 is listed above as having a 15:1 ratio, other types of compressors may be used if desired. - In a normal start-up operation, the
hydraulic pressure source 12 is powered on, and certain parameters are input to the control system 46 (for example, via a touch screen, keypad, data port, etc.). These parameters can include characteristics of the hydraulic actuator 14 (such as,piston 52 area and maximum stroke length), characteristics of the well (such as, expected minimum andmaximum rod string 18 loads, expected well pressure,initial fluid 26 flow rate, etc.), or any other parameters or combination of parameters. Some parameters may already be input to the control system 46 (such as, stored in non-volatile memory), for example, characteristics of thehydraulic pressure source 12 andhydraulic actuator 14 that are not expected to change, or default parameters. - At this point, the
piston rod 54 is already connected to therod string 18, and thehydraulic actuator 14 is installed on thewellhead 16 above therod BOP stack 42 and theannular seal housing 44. Thecontrol valve 120 is closed, thereby preventing communication between thegas balancing assembly 104 and theprimary pump 92. - The
volumes 110 andaccumulator 116 may be purged with nitrogen and optionally pre-charged with pressure prior to the start-up operation. Similarly, lines and volumes in thehydraulic pressure source 12 and thehydraulic actuator 14, and lines between thehydraulic pressure source 12 and thehydraulic actuator 14, may be purged withhydraulic fluid 106 prior to (or as part of) the start-up operation. - The
control system 46 determines a minimum volume of thehydraulic fluid 106 that will be needed for reciprocating thepiston 52 in thecylinder 50. Alternatively, a default volume of the hydraulic fluid 106 (which volume is appropriate for the actuator 14 characteristics) may be used. - An appropriate volume of the hydraulic fluid 106 (which volume is preferably greater than the minimum needed) is flowed by operation of the
accessory pump 94 from thehydraulic fluid reservoir 96 to fill the hydraulic fluid vessel (E-5 in the Equipment Table) and a lower portion of theaccumulator 116. Thelevel sensors 122 are used with thecontrol system 46 to verify that an appropriate level of thehydraulic fluid 106 is present in theaccumulator 116. - The
control system 46 determines an appropriate balance pressure that should be applied, based on, for example, the input parameters. Nominally, the balance pressure can be equal to the expected minimum load exerted by therod string 18 in operation, divided by the piston area of thepiston 52. However, as mentioned above, it may in some circumstances be advantageous to increase or decrease the balance pressure somewhat. - The air compressor (E-15 in the Equipment Table) is activated to supply a flow of pressurized air through the cooler (E-19 in the Equipment Table) and the air filters (E-12, E-13, E-14 in the Equipment Table) to the
membrane filter 112. Themembrane filter 112 provides a flow of concentrated nitrogen 118 (e.g., by removal of substantially all oxygen from the air) to thebooster compressor 114. Note that pressurized air is also supplied to thebooster compressor 114 from the compressor E-15 for operation of the booster compressor. - The
nitrogen 118 flows from thebooster compressor 114 into thevolumes 110 and an upper portion of theaccumulator 116. Thebooster compressor 114 elevates a pressure of thisnitrogen 118 to the desired balance pressure. - The pressure sensor I-3 monitors the pressure in the
gas balancing assembly 104. By virtue of thehydraulic fluid 106 being in contact with thenitrogen 118 in theaccumulator 116, the nitrogen pressure is the same as the hydraulic fluid pressure. - Note that each of the sensors (I-1, I-2, I-3, I-4, I-6, I-7, I-8, I-9, I-10 in the Equipment Table) is connected to the
control system 46, so that thecontrol system 46 is capable of monitoring parameters sensed by the sensors. Adjustments to the input parameters can be made by thecontrol system 46 in response to measurements made by the sensors if needed to maintain a desired condition (such as, efficient and economical operation), or to mitigate an undesired condition (such as, pump-off or pump-pound). Such adjustments may be made manually (for example, based on user input), or automatically (for example, based on instructions or programs stored in thecontrol system 46 memory), or a combination of manually and automatically (for example, using a program that initiates automatic control in response to a manual input). - The
piston 52,piston rod 54 androd string 18 can now be raised by opening thecontrol valve 120 and operating the primaryhydraulic pump 92. When thecontrol valve 120 is opened, the balance pressure is applied to theannular chamber 56 below the piston 52 (seeFIG. 2 ). Depending on the selected level of the balance pressure, the balance pressure applied to theannular chamber 56 will typically not cause thepiston 52 and attachedrod string 18 to displace upward, but some upward displacement of therod string 18 may be desired in some circumstances. - The primary
hydraulic pump 92 flows pressurized hydraulic fluid 106 from theaccumulator 116 and hydraulic fluid vessel E-5 to theannular chamber 56 of thehydraulic actuator 14, and increases the hydraulic fluid pressure therein, thereby causing thepiston 52 and attachedrod string 18 to rise in thewellbore 16 and operate the downhole pump 20 (seeFIG. 1 ). A hydraulic fluid pressure increase (greater than the balance pressure) needed to displace thepiston 52 upwardly to its upper stroke extent is dependent on various factors (such as,rod string 18 weight, friction in the well and in thehydraulic actuator 14,piston 52 area, well fluid 26 density, depth to thedownhole pump 20, etc.). - Nevertheless, the
control system 46 can operate the primaryhydraulic pump 92, so that thehydraulic fluid 106 flows into theannular chamber 56 until thepiston 52 is displaced to its upper stroke extent. Such displacement of thepiston 52 is indicated to thecontrol system 46 by the sensor(s) 70 of thehydraulic actuator 14. Note that thecontrol system 46 can operate the primaryhydraulic pump 92 in a manner that avoids an abrupt halt of thepiston 52 displacement at the upper stroke extent (e.g., by reducing a flow rate of thehydraulic fluid 106 as thepiston 52 approaches the upper stroke extent). - The
piston 52,piston rod 54 androd string 18 can then be lowered by ceasing operation of theprimary pump 92, and allowing thehydraulic fluid 106 to flow from theannular chamber 56 back through the primary hydraulic pump to the hydraulic fluid vessel E-5 and theaccumulator 116. Pressure in theannular chamber 56 below thepiston 52 will, thus, return to the balance pressure and the load exerted by therod string 18 will cause thepiston 52 andpiston rod 54 to descend in thecylinder 50. - Depending on the level of the balance pressure at this point, the
piston 52 may not return to its initial, lowermost position. Instead, thepiston 52 typically will descend to a lower stroke extent that avoids pump-pound (e.g., bottoming out of thevalve rod bushing 25 against the valve rod guide 23), while providing for efficient and economical operation. As thepiston 52 descends in thecylinder 50 and thehydraulic fluid 106 flows from theannular chamber 56 to the hydraulic fluid vessel E-5 andaccumulator 116, thecontrol system 46 can operate a variable displacement swash plate (not shown separately) in the primaryhydraulic pump 92 in a manner that avoids an abrupt halt of thepiston 52 displacement at the lower stroke extent (e.g., by reducing a flow rate of the hydraulic fluid as thepiston 52 approaches the lower stroke extent). - The "reverse" flow of the
hydraulic fluid 106 through the primaryhydraulic pump 92 could, in some examples, cause the primaryhydraulic pump 92 to rotate backward and thereby cause the prime mover 90 (when an electric motor is used) to generate electrical power. Thus, theprime mover 90 can serve as a motor when thehydraulic fluid 106 is pumped to thehydraulic actuator 14, and a generator when the hydraulic fluid is returned to thehydraulic pressure source 12. The generated electrical power may be stored (for example, using batteries, capacitors, etc.) for use by thehydraulic pressure source 12, or the electrical power may be supplied to the local electrical utility (for example, to offset the cost of electrical power supplied to thehydraulic pumping system 10, such as, in situations where the cost is based on demand and/or total usage). - The above-described actions of raising and lowering the
piston 52,piston rod 54 androd string 18 can be repeated indefinitely, in order to reciprocate therod string 18 in the well and operate thedownhole pump 20 to flow the well fluid 26 to the surface. However, it should be understood that variations in operation of thehydraulic pressure source 12 and thehydraulic actuator 14 are to be expected as the pumping operation progresses. - For example, assumptions or estimates may have been made to arrive at certain parameters initially input to the
control system 46. After an initial stroking of thehydraulic actuator 14, adjustments may be made automatically or manually (or both) via thecontrol system 46 to account for actual conditions. Such adjustments could include varying the balance pressure, thepiston 52 upper or lower stroke extents, the number ofpiston 52 strokes per minute (spm), etc. - At any point in the pumping operation, actuation of the
hydraulic actuator 14 can be stopped, so that displacement of thepiston 52 ceases, and a pressure level in the annular chamber 56 (e.g., sensed using the pressure sensor 1-10) needed to support the load exerted by therod string 18 can be measured. The pressure in theaccumulator 116 can then be adjusted, if needed, to provide an appropriate balance. - The
booster compressor 114 can be automatically operated by thecontrol system 46 to increase the balance pressure when appropriate. For example, based on measurements of the pressure applied to thehydraulic actuator 14 over time (sensed by the pressure sensor 1-10), it may be determined that efficiency or economy of operation (or work performed, as described more fully below) would be enhanced by increasing the balance pressure. In such circumstances, thecontrol system 46 can operate thebooster compressor 114 to increase the pressure on theaccumulator 116 until a desired, increased hydraulic balance pressure is achieved (e.g., as sensed by the pressure sensor I-3). - If a pump-off condition is detected during the pumping operation, a reciprocation speed can be adjusted to avoid this condition. For example, the
control system 46 can regulate thehydraulic fluid 106 flow rate (e.g., by varying an operational characteristic of the primary hydraulic pump 92 (such as, by adjusting a swash plate of the primary hydraulic pump 92), varying a rotational speed of theprime mover 90, varying a restriction to flow through thecontrol valve 120, etc.) to decrease a speed of ascent or descent (or both) of thepiston 52 in thecylinder 50 if pump-off is detected. Alternatively (or in addition), a stroke length of thepiston 52 could be decreased to cause a decrease in the flow rate of the fluid 26 from the well. - If a pump-pound condition is detected during the pumping operation, the lower stroke extent of the
piston 52 can be raised, for example, to avoid contact between thevalve rod bushing 25 and thevalve rod guide 23 in thedownhole pump 20. The lower stroke extent can be raised by decreasing the volume ofhydraulic fluid 106 returned to thehydraulic pressure source 12 from the hydraulic actuator 14 (e.g., by thecontrol system 46 beginning to change displacement of a swash plate of the primaryhydraulic pump 92 and thereby terminate reverse flow when thepiston 52 has descended to the raised lower stroke extent). If the detected pump-pound is due to contacting another component of thedownhole pump 20 on an upward stroke, the upper stroke extent of thepiston 52 can be lowered by decreasing the volume ofhydraulic fluid 106 pumped into the hydraulic actuator 14 (e.g., by thecontrol system 46 ceasing operation of the primaryhydraulic pump 92 when thepiston 52 has ascended to the lowered upper stroke extent). - The balance pressure can be increased at any point in the pumping operation by the
control system 46 operating thenitrogen concentrator assembly 102 and thebooster compressor 114. The balance pressure can be decreased at any point in the operation by discharging an appropriate volume of thenitrogen 118 in theaccumulator 116 and/or thenitrogen volumes 110 to the atmosphere. - The valve manifold V-2/V-3/V-4 can comprise a two position manifold (such as, a National Fluid Power Association (NFPA) D05 manifold marketed by Daman Products Company, Inc. of Mishawaka, Indiana USA) with two position spring return solenoid valves. In one example, a solenoid valve V-2 of the manifold activates V-1 (control valve 120) upon V-2 being energized, and for as long as V-2 remains energized it holds the V-1 control valve (120) open. A sandwich relief valve (such as, an
NFPA D05 20 MPa over-pressure safety relief valve marketed by Parker Hannifin Corporation of Cleveland, Ohio USA) can be used with the V-2 valve. Another sandwich relief valve V-4 (such as, adjustable 1 MPa to 7 MPa, set to 2 MPa) of the manifold can function as a charge circuit back-pressure/relief valve placed under a solenoid valve V-3. - Energizing the V-3 solenoid valve of the manifold closes off a 2 MPa relief flow to the radiator 98 (and back to the hydraulic fluid reservoir 96) to cause pressure from the accessory
hydraulic pump 94 to rise to the balance pressure and inject a volume ofhydraulic fluid 106 into P-3 (for example, to make up losses from the pressurizedgas balancing assembly 104, primaryhydraulic pump 92 andcylinder 50 circuit), until the level sensor I-6 indicates that sufficient hydraulic fluid is present in theaccumulator 116. When V-3 de-energizes, the accessoryhydraulic pump 94 output pressure (in P-14) returns to the 2 MPa relief valve setting. Of course, other settings and other types of valve manifolds may be used, without departing from the scope of this disclosure. - As mentioned above, certain adjustments may be made if a pump-pound condition is detected. In the
FIG. 7 example, a pump-pound condition can be detected by monitoring pressure of thehydraulic fluid 106 as sensed using the sensor 1-10. - The pump-pound condition will be apparent from fluctuations in pressure sensed by the sensor 1-10. For example, when the
valve rod bushing 25 strikes thevalve rod guide 23 of thedownhole pump 20, this will cause an abrupt change in therod string 18 displacement and the load exerted by the rod string, resulting in a corresponding abrupt change in thepiston rod 54 andpiston 52 displacement. Such abrupt displacement and load changes will, in turn, produce corresponding pressure changes in thehydraulic fluid 106 flowing from thehydraulic actuator 14 to thehydraulic pressure source 12. - The
control system 46 can be programmed to recognize hydraulic fluid pressure fluctuations that are characteristic of a pump-pound condition. For example, pressure fluctuations having a certain range of frequencies or amplitudes (or both) could be characteristic of a pump-pound condition, and if such frequencies or amplitudes are detected in the sensor 1-10 output, thecontrol system 46 can cause certain actions to take place in response. The actions could include displaying an alert, sounding an alarm, recording an event record, transmitting an indication of the pump-pound condition to a remote location, initiating a routine to appropriately raise the lower stroke extent of thepiston 52, etc. - An action that may be automatically implemented by the
control system 46 to raise the lower stroke extent of thepiston 52 can include incrementally decreasing the volume ofhydraulic fluid 106 returned to thehydraulic pressure source 12 from the hydraulic actuator 14 (e.g., by thecontrol system 46 adjusting the swash plate of the primaryhydraulic pump 92 to terminate reverse flow when thepiston 52 has descended to the raised lower stroke extent), until the pump-pound condition is no longer detected. If pump-pound is detected on an upward stroke of thepiston 52, then a similar set of actions can be initiated by thecontrol system 46 to appropriately lower the upper stroke extent of the piston (e.g., by incrementally decreasing the volume ofhydraulic fluid 106 pumped into thehydraulic actuator 14 when thepiston 52 is stroked upwardly, until the pump-pound condition is no longer detected). As mentioned above, the upper and lower stroke extents could, in some examples, be adjusted by changing positions of thesensors 70 on thecylinder 50. - Note that pressure fluctuations that are characteristic of a pump-pound condition can change based on a variety of different factors, and the characteristics of pressure fluctuations indicative of a pump-pound condition are not necessarily the same from one well to another. For example, a depth to the
downhole pump 20 could affect the amplitude of the pressure fluctuations, and a density of the fluid 26 could affect the frequency of the pressure fluctuations. Therefore, it may be advantageous during the start-up operation to intentionally produce a pump-pound condition, in order to enable detection of pressure fluctuations that are characteristic of the pump-pound condition in that particular well, so that such characteristics can be stored in thecontrol system 46 for use in detecting pump-pound conditions in that particular well. Pressure fluctuations are considered to be a type of vibration of thehydraulic fluid 106. - However, it should be clearly understood that the scope of this disclosure is not limited to use of pressure fluctuation measurements to detect a pump-pound condition. Various other types of vibration measurements can be used to indicate a pump-pound condition, and suitable sensors can be included in the
system 10 to sense these other types of vibrations. For example, an acoustic sensor, geophone or seismometer (e.g., a velocity sensor, motion sensor or accelerometer) may be used to sense vibrations resulting from a pump-pound condition. The sensor(s) 70 on theactuator 14 could include such sensors, or separate sensors could be used for such purpose if desired. - As mentioned above, certain adjustments may be made if a pump-off condition is detected. In the
FIG. 7 example, a pump-pound condition can be detected by monitoring over time the pressure of thehydraulic fluid 106 as sensed using the sensor 1-10, and the displacement of thepiston 52 as sensed using the sensor(s) 70. - In operation, pressure of the
hydraulic fluid 106 is directly related to the load or force transmitted between thehydraulic actuator 14 and therod string 18. Force multiplied by displacement equals work. If a pump-off condition occurs, the total work performed during a reciprocation cycle will decrease due, for example, to gas intake to thepump 20 and/or toless fluid 26 being pumped to the surface. - Thus, by monitoring the work performed during individual reciprocation cycles over time, the
control system 46 can detect whether a pump-off condition is occurring, and can make appropriate adjustments to mitigate the pump-off condition (such as, by decreasing a reciprocation speed of thehydraulic actuator 14, as discussed above). Such adjustments may be made automatically or manually (or both). Other actions (for example, displaying an alert, sounding an alarm, recording an event record, transmitting an indication of the pump-off condition to a remote location, etc.) may be performed by thecontrol system 46 as an alternative to, or in addition to, the adjustments. - In
FIGS. 8A & B , examples of load versus displacement graphs for thesystem 10 are representatively illustrated. As mentioned above, in operation, load or force transmitted between thehydraulic actuator 14 and therod string 18 is directly related to hydraulic fluid pressure, and so the graphs could instead be drawn for pressure versus displacement, if desired. Thus, the scope of this disclosure is not limited to any particular technique for determining work performed by thehydraulic actuator 14. - A reciprocation cycle for the
hydraulic actuator 14 is depicted inFIG. 8A without a pump-off condition. In theFIG. 8A graph, it may be observed that the force quickly increases as thehydraulic actuator 14 begins to raise therod string 18, and then the force substantially levels off as the fluid 26 flows from the well (although in practice the force can decrease somewhat due tofluid 26 inertia effects and as less fluid is lifted near the end of the upward stroke). The force then quickly decreases as thehydraulic actuator 14 allows therod string 18 to descend in the well, and then the force substantially levels off until an end of the downward stroke. - The graph of
FIG. 8A has a shape (e.g., generally parallelogram) that is indicative of a reciprocation cycle with no pump-off condition. In actual practice, the idealized parallelogram shape of theFIG. 8A graph will not be exactly produced, but thecontrol system 46 can be programmed to recognize shapes that are indicative of reciprocation cycles with no pump-off condition. - An area A1 of the
FIG. 8A graph is representative of the total work performed during this reciprocation cycle (e.g., including a summation of the work performed during the upward and downward strokes). The area A1 can be readily calculated by thecontrol system 46 for comparison to other areas of reciprocation cycles, either prior to or after theFIG. 8A reciprocation cycle. - By comparing the total work performed in different reciprocation cycles, the
control system 46 can determine whether and how the work performed has changed. If the total work performed has changed, thecontrol system 46 can make appropriate adjustments to certain parameters, in order to mitigate any undesired conditions, or to enhance any desired conditions. - In
FIG. 8B , the force versus displacement graph for another reciprocation cycle is depicted, in which a pump-off condition is occurring. Note that an area A2 of theFIG. 8B graph is less than the area A1 of theFIG. 8A graph. This indicates that less total work is performed in theFIG. 8B reciprocation cycle, as compared to theFIG. 8A reciprocation cycle. - If the
FIG. 8B reciprocation cycle is after theFIG. 8A reciprocation cycle, thecontrol system 46 can recognize that less total work is being performed over time, and can make appropriate adjustments (such as, by reducing the reciprocation speed). Such adjustments can be made incrementally, with repeated comparisons of total work performed over time, so that thecontrol system 46 can verify whether the adjustments are accomplishing intended results (e.g., increased total work performed over time, due to reduced pump-off). - If the
FIG. 8A reciprocation cycle is after theFIG. 8B reciprocation cycle, thecontrol system 46 can recognize that more work is being performed over time and that, if incremental adjustments are being made, those incremental adjustments should continue. However, thecontrol system 46 can discontinue the adjustments, for example, if other objectives (such as, operational efficiency, economy, etc.) would be reduced if the adjustments continue. - The
FIG. 8B graph has a shape that is not indicative of a reciprocation cycle in which a pump-off condition is not occurring. Stated differently, the shape of theFIG. 8B graph (for example, with a rounded upward slope, reduced maximum force on the upward stroke and one or more reductions in force during the upward stroke) is indicative of a pump-off condition. Thecontrol system 46 can be programmed to recognize such shapes, so that adjustments can be made to mitigate the pump-off condition. - Similar to the procedure described above for situations (where the
control system 46 recognizes a substantial change in total work performed), the control system can incrementally decrease the reciprocation speed if a pump-off condition is detected, until the shape of the force (or pressure) versus displacement graph for a reciprocation cycle does not indicate pump-off. If force (or pressure) versus displacement graphs initially do not indicate a pump-off condition, thecontrol system 46 can incrementally increase the reciprocation speed (to thereby increase a rate of production), until the shape of the graph for a reciprocation cycle does begin to indicate pump-off, at which point the control system can incrementally decrease the reciprocation speed until the shape of the graph does not indicate pump-off. In this manner, production rate can be maximized, without any sustained pump-off condition. - It will be readily appreciated that the graphs shown in
FIGS. 8A and 8B are visual illustrations of measured force or pressure with respect to measured displacement of thepiston 52 androd string 18. If automatic adjustment of any of thehydraulic actuator 14 operating parameters, e.g., reciprocation rate, maximum stroke extent, etc. are implemented by thecontrol system 46, actual graphs may not be constructed or displayed; thecontrol system 46 may detect the numerical or other equivalent of the "shape" of a graph by implementing suitable detection and control processes therein in response to measurements from any one or more of the various sensors described above. - Referring additionally now to
FIG. 9 , another example of theseal assembly 78 in theannular seal housing 44 is representatively illustrated. In this example, theseal assembly 78 includes multiple stackedseal cartridges 130 for providing effective redundant annular sealing about thepiston rod 54. Labyrinth rings 132 are included at either end of theseal assembly 78 for excluding debris, andradial bearings 134 are positioned between the labyrinth rings and theseal cartridges 130 for maintaining consistent radial spacing between the seal assembly and thepiston rod 54. - A
wiper ring 136 may be included in theseal assembly 78 above theseal cartridges 130 for maintaining the lubricant 86 (seeFIG. 4 ) in theannular chamber 82.Seals 138 on an exterior of theseal assembly 78 sealingly engage an interior of theannular seal housing 44, and adebris excluder 140 isolates theseals 138 from any debris in the interior of theannular seal housing 44. - The labyrinth rings 132 may comprise single-turn or multiple-turn rings that contact and slidingly engage the
piston rod 54. Whether single-turn or multiple-turn rings are used, preferably eachlabyrinth ring 132 comprises multiple stacked ring layers to provide a labyrinthine path for any debris to negotiate in order to traverse the labyrinth ring. The labyrinth rings 132 also effectively scrape debris and films from an exterior surface of thepiston rod 54, thereby preventing such substances from interfering with sealing engagement between theseal cartridges 130 and the piston rod exterior surface. Suitable labyrinth rings for use in theseal assembly 78 are the Laminar Seal Rings available from the Smalley Steel Ring Company of Lake Zurich, Illinois USA. - The
radial bearings 134 are precisely dimensioned to evenly space apart theseal assembly 78 from thepiston rod 54. Preferably, theradial bearings 134 are tough, durable and have relatively low sliding friction against the exterior surface of thepiston rod 54. A suitable material for use in theradial bearings 134 is poly-ether-ether-ketone (PEEK), optionally combined with other material to provide, for example, enhanced abrasion resistance, reduced friction, increased strength, etc. - The
wiper ring 136 is not necessarily configured for sealing against a substantial pressure differential, but is mainly used for providing isolation between thelubricant 86 in theannular chamber 82, and fluid, grease, etc., exposed to theseal cartridges 130. Suitable materials for thewiper ring 136 include nitrile and fluorocarbon rubber. - The
seals 138 are static annular seals between theseal assembly 78 and theannular seal housing 44. Theseals 138 may be, for example, O-rings made of nitrile or fluorocarbon rubber. - The
debris excluder 140 is configured for preventing debris from entering an annular space between theseal assembly 78 and the annular seal housing. Suitable materials for thewiper ring 136 include nitrile and fluorocarbon rubber. - Referring additionally now to
FIG. 10 , an enlarged scale cross-sectional view of one of theseal cartridges 130 is representatively illustrated, apart from theseal assembly 78 ofFIG. 9 . In this view it may be more clearly seen that eachseal cartridge 130 includes aseparate seal carrier 142 on which both an internaldynamic seal 144 and an externalstatic seal 146 are mounted. - The
seal carrier 142 is preferably made of a substantially rigid material, such as steel or another metal or metal alloy. The rigidity of theseal carrier 142 provides structural isolation between theseals adjacent seal cartridges 130, so that each seal cartridge operates independently of the other seal cartridges. - The
dynamic seal 144 is positioned in anannular recess 148 formed in theseal carrier 142. Thedynamic seal 144 slidingly and sealingly engages the exterior surface of thepiston rod 54, and also sealingly engages theseal carrier 142 in therecess 148. Since thepiston rod 54 displaces relative to thedynamic seal 144 as the dynamic seal seals against the piston rod, the dynamic seal is preferably made of a tough, durable and relatively low sliding friction material, such as poly-ether-ether-ketone (PEEK). - The
static seal 146 is positioned in anannular recess 150 formed on theseal carrier 142. Thestatic seal 146 seals between theseal carrier 142 and ahousing 152 of the seal assembly 78 (seeFIG. 9 ). Thestatic seal 146 may be an O-ring, and may be made of a suitable material, such as nitrile or fluorocarbon rubber. - Note that, although certain seal configurations and materials have been described above for the
seal assembly 78, these are just examples of a wide variety of possible configurations and materials that may be used for the seal assembly. Therefore, the scope of this disclosure is not limited to any particular seal configuration, number or combination of seals, or seal materials. - It may now be fully appreciated that the above description provides significant advancements to the art of artificial lifting for subterranean wells. In various examples described above, pumping of a fluid from a well can be made more efficient, convenient, economical and productive utilizing the
hydraulic pumping system 10 and associated methods. - The above disclosure provides to the art a
hydraulic pumping system 10 for use with a subterranean well. In one example, thesystem 10 can comprise ahydraulic actuator 14 including apiston rod 54 that displaces in response to pressure in the hydraulic actuator, afirst seal assembly 66 that seals about thepiston rod 54 and is exposed to the pressure in thehydraulic actuator 14, and asecond seal assembly 78 that seals about thepiston rod 54 and is exposed to pressure in the well. Thesecond seal assembly 78 can include multipleseparate seal cartridges 130, each of the seal cartridges including adynamic seal 144 that slidingly and sealingly engages thepiston rod 54. - Each of the
seal cartridges 130 can include astatic seal 146 that sealingly engages ahousing 152 of thesecond seal assembly 78. - Each of the
seal cartridges 130 can include aseal carrier 142 that structurally isolates thedynamic seals 144 ofadjacent seal cartridges 130 from each other. - The
second seal assembly 78 can include alabyrinth ring 132 comprising multiple ring layers. - The
system 10 can include alubricant injector 80 that delivers apressurized lubricant 86 to a space between the first andsecond seal assemblies - The
piston rod 54 may be entirely isolated from atmosphere between the first andsecond seal assemblies - The
second seal assembly 78 may be positioned in anannular seal housing 44. Disconnection of thehydraulic actuator 14 from theannular seal housing 44 can provide access to thesecond seal assembly 78. - A
hydraulic pump 92 may be connected between thehydraulic actuator 14 and anaccumulator 116. Ahydraulic fluid 106 may be in contact with apressurized gas 118 in theaccumulator 116. Pressure in theaccumulator 116 can be automatically regulated in response to measurements of pressure applied to thehydraulic actuator 14. - An extent of reciprocation displacement of the
piston rod 54 may be automatically varied in response to a measured vibration. - Another
hydraulic pumping system 10 for use with a subterranean well is provided to the art by the above disclosure. In this example, thesystem 10 can comprise ahydraulic actuator 14 including apiston rod 54 that displaces in response to pressure in the hydraulic actuator, afirst seal assembly 66 that seals about thepiston rod 54 and is exposed to the pressure in thehydraulic actuator 14, and asecond seal assembly 78 that seals about thepiston rod 54 and is exposed to pressure in the well. Thesecond seal assembly 78 includes alabyrinth ring 132 comprising multiple ring layers. - Although various examples have been described above, with each example having certain features, it should be understood that it is not necessary for a particular feature of one example to be used exclusively with that example. Instead, any of the features described above and/or depicted in the drawings can be combined with any of the examples, in addition to or in substitution for any of the other features of those examples. One example's features are not mutually exclusive to another example's features. Instead, the scope of this disclosure encompasses any combination of any of the features.
- Although each example described above includes a certain combination of features, it should be understood that it is not necessary for all features of an example to be used. Instead, any of the features described above can be used, without any other particular feature or features also being used.
- It should be understood that the various embodiments described herein may be utilized in various orientations, such as inclined, inverted, horizontal, vertical, etc., and in various configurations, without departing from the principles of this disclosure. The embodiments are described merely as examples of useful applications of the principles of the disclosure, which is not limited to any specific details of these embodiments.
- In the above description of the representative examples, directional terms (such as "above," "below," "upper," "lower," etc.) are used for convenience in referring to the accompanying drawings. However, it should be clearly understood that the scope of this disclosure is not limited to any particular directions described herein.
- The terms "including," "includes," "comprising," "comprises," and similar terms are used in a non-limiting sense in this specification. For example, if a system, method, apparatus, device, etc., is described as "including" a certain feature or element, the system, method, apparatus, device, etc., can include that feature or element, and can also include other features or elements. Similarly, the term "comprises" is considered to mean "comprises, but is not limited to."
- Of course, a person skilled in the art would, upon a careful consideration of the above description of representative embodiments of the disclosure, readily appreciate that many modifications, additions, substitutions, deletions, and other changes may be made to the specific embodiments, and such changes are contemplated by the principles of this disclosure. For example, structures disclosed as being separately formed can, in other examples, be integrally formed and vice versa. Accordingly, the foregoing detailed description is to be clearly understood as being given by way of illustration and example only, the scope of the invention being limited solely by the appended claims and their equivalents. Each feature disclosed or illustrated in the present specification may be incorporated in the invention, whether alone or in any appropriate combination with any other feature disclosed or illustrated herein.
Claims (15)
- A hydraulic pumping system (10) for use with a subterranean well, the system comprising:a hydraulic actuator (14) including a generally tubular cylinder (50), a piston (52) sealingly and reciprocably disposed in the cylinder (50), and a piston rod (54) connected to the piston (52), wherein the piston rod (54) displaces relative to the cylinder in response to a pressure differential across the piston (52);a first seal assembly (66) that seals about the piston rod (54) and is exposed to the pressure in the hydraulic actuator (14); anda second seal assembly (78) that seals about the piston rod (54) and is exposed to pressure in the well, the second seal assembly (78) including multiple separate seal cartridges (130), each of the seal cartridges (130) including a dynamic seal (144) that slidingly and sealingly engages the piston rod (54),wherein the second seal assembly (78) is positioned in an annular seal housing (44), wherein disconnection of the hydraulic actuator (14) from the annular seal housing (44) provides access to the second seal assembly (78), andwherein the piston rod (54) connects to a rod string (18) below the first and second seal assemblies (66, 78).
- The system of claim 1, wherein each of the seal cartridges (130) further includes a static seal (146) that sealingly engages a housing (152) of the second seal assembly (78).
- The system of claim 1, wherein each of the seal cartridges (130) further includes a seal carrier (142) that structurally isolates the dynamic seals (144) of adjacent seal cartridges (130) from each other.
- The system of claim 1, wherein the second seal assembly (78) further includes a labyrinth ring (132) comprising multiple ring layers.
- The system of claim 1, further comprising a lubricant injector (80) that delivers a pressurized lubricant (86) to a space between the first and second seal assemblies (66, 78).
- The system of claim 1, wherein the piston rod (54) is entirely isolated from atmosphere between the first and second seal assemblies (66, 78).
- The system of claim 1, wherein a hydraulic pump (92) is connected between the hydraulic actuator (14) and an accumulator (116), and wherein a hydraulic fluid (106) is in contact with a pressurized gas (118) in the accumulator (116).
- The system of claim 1, wherein a hydraulic pump (92) is connected between the hydraulic actuator (14) and an accumulator (116), and wherein pressure in the accumulator (116) is automatically regulated in response to measurements of pressure applied to the hydraulic actuator (14).
- The system of claim 1, wherein an extent of reciprocation displacement of the piston rod (54) is automatically varied in response to a measured vibration.
- A hydraulic pumping system (10) for use with a subterranean well, the system comprising:a hydraulic actuator (14) including a generally tubular cylinder (50), a piston (52) sealingly and reciprocably disposed in the cylinder (50), and a piston rod (54) connected to the piston (52), wherein the piston rod (54) displaces relative to the cylinder in response to a pressure differential across the piston (52);a first seal assembly (66) that seals about the piston rod (54) and is exposed to the pressure in the hydraulic actuator (14); anda second seal assembly (78) that seals about the piston rod (54) and is exposed to pressure in the well, the second seal assembly (78) including a labyrinth ring (132) comprising multiple ring layers, wherein the second seal assembly (78) is positioned in an annular seal housing (44), wherein disconnection of the hydraulic actuator (14) from the annular seal housing (44) provides access to the second seal assembly (78), and wherein the piston rod (54) connects to a rod string (18) below the first and second seal assemblies (66, 78).
- The system of claim 10, further comprising a lubricant injector (80) that delivers a pressurized lubricant (86) to a space between the first and second seal assemblies (66, 78).
- The system of claim 10, wherein the piston rod (54) is entirely isolated from atmosphere between the first and second seal assemblies (66, 78).
- The system of claim 10, wherein a hydraulic pump (92) is connected between the hydraulic actuator (14) and an accumulator (116), and wherein a hydraulic fluid (106) is in contact with a pressurized gas (118) in the accumulator (116).
- The system of claim 10, wherein a hydraulic pump (92) is connected between the hydraulic actuator (14) and an accumulator (116), and wherein pressure in the accumulator (116) is automatically regulated in response to measurements of pressure applied to the hydraulic actuator (14).
- The system of claim 10, wherein an extent of reciprocation displacement of the piston rod (54) is automatically varied in response to a measured vibration.
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/US2015/043694 WO2017023303A1 (en) | 2015-08-05 | 2015-08-05 | Hydraulic pumping system for use with a subterranean well |
| US14/956,527 US10760388B2 (en) | 2015-08-05 | 2015-12-02 | Slant mounted hydraulic pumping system |
| US14/956,863 US9903187B2 (en) | 2015-08-05 | 2015-12-02 | Hydraulic pumping system with enhanced piston rod sealing |
| US14/956,601 US10619464B2 (en) | 2015-08-05 | 2015-12-02 | Hydraulic pumping system with detection of fluid in gas volume |
| US14/956,545 US11098708B2 (en) | 2015-08-05 | 2015-12-02 | Hydraulic pumping system with piston displacement sensing and control |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP3135860A2 EP3135860A2 (en) | 2017-03-01 |
| EP3135860A3 EP3135860A3 (en) | 2017-05-24 |
| EP3135860B1 true EP3135860B1 (en) | 2020-07-29 |
Family
ID=56609781
Family Applications (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP16183123.5A Not-in-force EP3135859B1 (en) | 2015-08-05 | 2016-08-05 | Pumping system and method |
| EP16183114.4A Active EP3128123B1 (en) | 2015-08-05 | 2016-08-05 | Pumping system and method |
| EP16183105.2A Active EP3128122B1 (en) | 2015-08-05 | 2016-08-05 | Pumping system and method |
| EP16183126.8A Active EP3135860B1 (en) | 2015-08-05 | 2016-08-05 | Pumping system and method |
Family Applications Before (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP16183123.5A Not-in-force EP3135859B1 (en) | 2015-08-05 | 2016-08-05 | Pumping system and method |
| EP16183114.4A Active EP3128123B1 (en) | 2015-08-05 | 2016-08-05 | Pumping system and method |
| EP16183105.2A Active EP3128122B1 (en) | 2015-08-05 | 2016-08-05 | Pumping system and method |
Country Status (1)
| Country | Link |
|---|---|
| EP (4) | EP3135859B1 (en) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109026641B (en) * | 2018-06-27 | 2019-11-01 | 潍柴动力股份有限公司 | The test method of hydraulic pump zero load discharge capacity |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5209495A (en) * | 1990-09-04 | 1993-05-11 | Palmour Harold H | Reciprocating rod pump seal assembly |
| WO2009097338A2 (en) * | 2008-01-28 | 2009-08-06 | Petro Hydraulic Lift System, L.L.C. | Hydraulic oil well pumping apparatus |
| US20140231093A1 (en) * | 2013-02-19 | 2014-08-21 | R. Lee Hoell | Hydraulic Oil Well Pumping System, and Method for Delivering Gas From a Well |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3696675A (en) | 1971-09-20 | 1972-10-10 | Tech Nomedic Corp | Method and means for determining liquid level in a container |
| US4707993A (en) * | 1980-11-24 | 1987-11-24 | Hydro-Horse, Inc. | Pumping apparatus |
| US4762473A (en) * | 1986-02-05 | 1988-08-09 | Tieben James B | Pumping unit drive system |
| US4848085A (en) * | 1988-02-23 | 1989-07-18 | Dynamic Hydraulic Systems, Inc. | Oil-well pumping system or the like |
| US5431230A (en) * | 1991-04-08 | 1995-07-11 | Rotating Production Systems, Inc. | Slant wellbore tubing anchor catcher with rotating mandrel |
| US6346806B1 (en) * | 1997-03-12 | 2002-02-12 | Pepperl +Fuchs Gmbh | Device for detecting the position of a moveable magnet to produce a magnetic field |
| CA2288479C (en) * | 1999-11-03 | 2005-03-22 | John Alan Cimbura | Gimbal and seal for the drivehead of a downhole rotary pump |
| CA2436924C (en) * | 2002-08-09 | 2010-09-21 | Oil Lift Technology Inc. | Stuffing box for progressing cavity pump drive |
| US7255163B2 (en) * | 2004-08-10 | 2007-08-14 | Rivard Raymond P | Convertible rotary seal for progressing cavity pump drivehead |
| US8066496B2 (en) * | 2005-04-11 | 2011-11-29 | Brown T Leon | Reciprocated pump system for use in oil wells |
| CN101305187B (en) * | 2005-10-13 | 2010-12-08 | 井泵技术有限公司 | System and method for optimizing down-hole fluid yield |
| US7600563B2 (en) * | 2006-06-29 | 2009-10-13 | Marion Brecheisen | Dual cylinder lift pump system and method |
| US20140079560A1 (en) * | 2012-09-14 | 2014-03-20 | Chris Hodges | Hydraulic oil well pumping system, and method for pumping hydrocarbon fluids from a wellbore |
| US20140328664A1 (en) * | 2013-05-02 | 2014-11-06 | Conocophillips Company | Single circuit double-acting pump |
-
2016
- 2016-08-05 EP EP16183123.5A patent/EP3135859B1/en not_active Not-in-force
- 2016-08-05 EP EP16183114.4A patent/EP3128123B1/en active Active
- 2016-08-05 EP EP16183105.2A patent/EP3128122B1/en active Active
- 2016-08-05 EP EP16183126.8A patent/EP3135860B1/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5209495A (en) * | 1990-09-04 | 1993-05-11 | Palmour Harold H | Reciprocating rod pump seal assembly |
| WO2009097338A2 (en) * | 2008-01-28 | 2009-08-06 | Petro Hydraulic Lift System, L.L.C. | Hydraulic oil well pumping apparatus |
| US20140231093A1 (en) * | 2013-02-19 | 2014-08-21 | R. Lee Hoell | Hydraulic Oil Well Pumping System, and Method for Delivering Gas From a Well |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3128122B1 (en) | 2020-09-23 |
| EP3128123A2 (en) | 2017-02-08 |
| EP3135860A3 (en) | 2017-05-24 |
| EP3135859A2 (en) | 2017-03-01 |
| EP3128123A3 (en) | 2017-05-31 |
| EP3128122A1 (en) | 2017-02-08 |
| EP3135859A3 (en) | 2017-05-31 |
| EP3135860A2 (en) | 2017-03-01 |
| EP3128123B1 (en) | 2020-07-29 |
| EP3135859B1 (en) | 2018-09-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20210340972A1 (en) | Hydraulic pumping system with piston displacement sensing and control | |
| US10167865B2 (en) | Hydraulic pumping system with enhanced piston rod sealing | |
| US10240452B2 (en) | Reservoir analysis with well pumping system | |
| JPH11514065A (en) | Coriolis pump off-state control device | |
| EP3170968B1 (en) | Well pumping system and method | |
| US8844626B1 (en) | Method and apparatus for autonomous oil and gas well down-hole pump leakage testing | |
| EP2516792A2 (en) | Rigless low volume pump system | |
| US11952995B2 (en) | Multi-phase fluid pump system | |
| EP3135860B1 (en) | Pumping system and method | |
| US10167707B2 (en) | Rod string rotation during well pumping operations | |
| CA2936320C (en) | Hydraulic pumping system with enhanced piston rod sealing | |
| EP3128124B1 (en) | Pumping system and method | |
| CA2936221C (en) | Slant mounted hydraulic pumping system | |
| CA2936302C (en) | Hydraulic pumping system with enhanced piston rod sealing | |
| CA2936322C (en) | Hydraulic pumping system with detection of fluid in gas volume | |
| CA2936220C (en) | Hydraulic pumping system with piston displacement sensing and control | |
| EP3173576A1 (en) | Well pumping system and method | |
| US10344573B2 (en) | Position sensing for wellsite pumping unit |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: E21B 43/12 20060101AFI20170419BHEP |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20171103 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20180315 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20200408 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1296009 Country of ref document: AT Kind code of ref document: T Effective date: 20200815 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602016040704 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20200729 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1296009 Country of ref document: AT Kind code of ref document: T Effective date: 20200729 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201030 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200729 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200729 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201130 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200729 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200729 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201029 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200729 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201029 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200729 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200729 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200729 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200729 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201129 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 602016040704 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200729 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200729 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200729 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200831 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200805 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200729 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200729 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200729 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200831 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200729 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200729 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20200831 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200729 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20201029 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200729 |
|
| 26N | No opposition filed |
Effective date: 20210430 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210302 Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200929 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200831 Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200729 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20201029 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200805 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200729 Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200729 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200729 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200729 |