EP3118565A1 - Method for protecting a vehicle against an attack by a laser beam - Google Patents
Method for protecting a vehicle against an attack by a laser beam Download PDFInfo
- Publication number
- EP3118565A1 EP3118565A1 EP16001538.4A EP16001538A EP3118565A1 EP 3118565 A1 EP3118565 A1 EP 3118565A1 EP 16001538 A EP16001538 A EP 16001538A EP 3118565 A1 EP3118565 A1 EP 3118565A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- laser beam
- missile
- laser
- sensor
- guided missile
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims abstract description 21
- 230000005855 radiation Effects 0.000 claims abstract description 49
- 239000000463 material Substances 0.000 claims description 34
- 238000001514 detection method Methods 0.000 claims description 9
- 238000005474 detonation Methods 0.000 claims description 8
- 230000001419 dependent effect Effects 0.000 claims description 7
- 206010041662 Splinter Diseases 0.000 claims description 5
- 239000012080 ambient air Substances 0.000 claims description 3
- 239000007787 solid Substances 0.000 claims 1
- 238000002679 ablation Methods 0.000 description 11
- 230000006378 damage Effects 0.000 description 7
- 239000000779 smoke Substances 0.000 description 7
- 239000003570 air Substances 0.000 description 5
- 238000013459 approach Methods 0.000 description 5
- 238000005259 measurement Methods 0.000 description 5
- 238000003672 processing method Methods 0.000 description 4
- 230000008901 benefit Effects 0.000 description 3
- 230000007123 defense Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000001815 facial effect Effects 0.000 description 3
- 238000005286 illumination Methods 0.000 description 3
- 239000011159 matrix material Substances 0.000 description 3
- 238000001228 spectrum Methods 0.000 description 3
- 241000093804 Berzelia galpinii Species 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 239000002360 explosive Substances 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 230000003595 spectral effect Effects 0.000 description 2
- RZVHIXYEVGDQDX-UHFFFAOYSA-N 9,10-anthraquinone Chemical compound C1=CC=C2C(=O)C3=CC=CC=C3C(=O)C2=C1 RZVHIXYEVGDQDX-UHFFFAOYSA-N 0.000 description 1
- 241000881711 Acipenser sturio Species 0.000 description 1
- 208000010201 Exanthema Diseases 0.000 description 1
- 241001295925 Gegenes Species 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 230000001154 acute effect Effects 0.000 description 1
- 230000033228 biological regulation Effects 0.000 description 1
- 238000005422 blasting Methods 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 230000001427 coherent effect Effects 0.000 description 1
- 239000003086 colorant Substances 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 238000001704 evaporation Methods 0.000 description 1
- 201000005884 exanthem Diseases 0.000 description 1
- 239000012634 fragment Substances 0.000 description 1
- 239000007789 gas Substances 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 238000007654 immersion Methods 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 239000003550 marker Substances 0.000 description 1
- 239000002245 particle Substances 0.000 description 1
- 238000009527 percussion Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 239000003380 propellant Substances 0.000 description 1
- 206010037844 rash Diseases 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 239000004509 smoke generator Substances 0.000 description 1
- 239000004449 solid propellant Substances 0.000 description 1
- 238000012876 topography Methods 0.000 description 1
- 230000008016 vaporization Effects 0.000 description 1
Images

Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F41—WEAPONS
- F41H—ARMOUR; ARMOURED TURRETS; ARMOURED OR ARMED VEHICLES; MEANS OF ATTACK OR DEFENCE, e.g. CAMOUFLAGE, IN GENERAL
- F41H11/00—Defence installations; Defence devices
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F41—WEAPONS
- F41G—WEAPON SIGHTS; AIMING
- F41G7/00—Direction control systems for self-propelled missiles
- F41G7/20—Direction control systems for self-propelled missiles based on continuous observation of target position
- F41G7/30—Command link guidance systems
- F41G7/301—Details
- F41G7/303—Sighting or tracking devices especially provided for simultaneous observation of the target and of the missile
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F41—WEAPONS
- F41H—ARMOUR; ARMOURED TURRETS; ARMOURED OR ARMED VEHICLES; MEANS OF ATTACK OR DEFENCE, e.g. CAMOUFLAGE, IN GENERAL
- F41H13/00—Means of attack or defence not otherwise provided for
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F42—AMMUNITION; BLASTING
- F42B—EXPLOSIVE CHARGES, e.g. FOR BLASTING, FIREWORKS, AMMUNITION
- F42B15/00—Self-propelled projectiles or missiles, e.g. rockets; Guided missiles
- F42B15/01—Arrangements thereon for guidance or control
Abstract
Die Erfindung geht aus von einem Verfahren zum Schützen eines Fahrzeugs (2) vor einem Angriff durch einen von einer Laserquelle (10) ausgehenden Laserstrahl (8). Ein effektiver Schutz kann erreicht werden, wenn ein Sensor (16, 42, 44, 46, 48) die Laserstrahlung des Laserstrahls (8) detektiert, ein Lenkflugkörper (12) in den Laserstrahl (8) hinein fliegt, im Laserstrahl (8) auf die Laserquelle (10) zufliegt und hierbei das Fahrzeug (2) vor dem Laserstrahl (8) abschattet.The invention is based on a method for protecting a vehicle (2) against attack by a laser beam (8) emanating from a laser source (10). An effective protection can be achieved if a sensor (16, 42, 44, 46, 48) detects the laser radiation of the laser beam (8), a guided missile (12) flies into the laser beam (8), in the laser beam (8) the laser source (10) incident and in this case the vehicle (2) shaded in front of the laser beam (8).
Description
Die Erfindung betrifft ein Verfahren zum Schützen eines Fahrzeugs vor einem Angriff durch einen von einer Laserquelle ausgehenden Laserstrahl.The invention relates to a method for protecting a vehicle from attack by a laser beam emanating from a laser source.
Mit Hochenergielasern lassen sich sehr hohe Leistungen über mehrere Kilometer und über eine längere Zeitdauer übertragen. Mit solchen Leistungen können empfindliche Teile von Fahrzeugen innerhalb von einigen Sekunden so schwer beschädigt oder zerstört werden, dass die Funktionsfähigkeit der Fahrzeuge gefährdet ist. So können beispielsweise Luftfahrzeuge vom Boden aus angegriffen werden, wobei insbesondere langsam fliegende Verkehrsflugzeuge mit verhältnismäßig geringer Manövrierfähigkeit besonders gefährdet sind.High-energy lasers can transmit very high power over several kilometers and over a longer period of time. With such services, sensitive parts of vehicles can be so severely damaged or destroyed within a few seconds that the functioning of the vehicles is jeopardized. Thus, for example, aircraft can be attacked from the ground, in particular slow-moving commercial aircraft with relatively low maneuverability are particularly vulnerable.
Es ist daher eine Aufgabe der vorliegenden Erfindung, ein wirkungsvolles Verfahren zum Schützen eines Fahrzeugs vor einem Angriff durch einen Laserstrahl anzugeben.It is therefore an object of the present invention to provide an effective method for protecting a vehicle from attack by a laser beam.
Diese Aufgabe wird durch ein Verfahren der eingangs genannten Art gelöst, bei dem erfindungsgemäß ein Sensor die Laserstrahlung des Laserstrahls detektiert, ein Lenkflugkörper in den Laserstrahl hinein fliegt, im Laserstrahl auf die Laserquelle zufliegt und hierbei das Fahrzeug vor dem Laserstrahl abschattet. Der Flugkörper kann die Laserquelle anfliegen und bekämpfen und während des Anflugs auf die Laserquelle das Fahrzeug abschatten. Dies geschieht zweckmäßigerweise so zügig, dass die am Fahrzeug deponierte Laserenergie noch nicht zu bedrohlichen Schäden geführt hat. Ein schneller Schutz kann durch ein Starten des Flugkörpers vom Fahrzeug aus erreicht werden, da dann der Lenkflugkörper bereits vor Ort ist und zur Abschattung in den Laserstrahl eintauchen und zur Bekämpfung der Laserquelle zügig auf diese zufliegen kann. Hierzu ist der Lenkflugkörper zweckmäßigerweise mit einem Raketenmotor ausgerüstet. Der Lenkflugkörper kann bei einem Anflug auf die Laserquelle diese mittels eines Wirkteils mechanisch zerstören, beispielsweise durch eine kegelförmig nach vorne gerichtete Splitterladung.This object is achieved by a method of the type mentioned, in which according to the invention a sensor detects the laser radiation of the laser beam, a guided missile flies into the laser beam, in the laser beam incident on the laser source and thereby shading the vehicle from the laser beam. The missile can approach and combat the laser source and shade the vehicle during the approach to the laser source. This is done expediently so quickly that the laser energy deposited on the vehicle has not yet led to threatening damage. A fast protection can be achieved by starting the missile from the vehicle, since then the missile is already on site and dive into the laser beam for shading and can quickly fly to combat the laser source on this. For this purpose, the missile is expediently equipped with a rocket motor. The guided missile can be at an approach to the Laser source mechanically destroy them by means of an active part, for example, by a cone-shaped forward splintering charge.
Der Lenkflugkörper nutzt den Laserstrahl als Leitstrahl zum Ansteuern der Laserquelle. Die Lenkung bzw. Navigation des Lenkflugkörpers geschieht insofern unter Verwendung von Sensordaten, die aus einem Abtasten des Laserstrahls gewonnen wurden. Es kann ein Parameter des Laserstrahls, beispielsweise eine Streulichtstärke, zur Navigation verwendet werden, beispielsweise indem die gemessene Streulichtstärke beim Anflug konstant gehalten oder nach einem vorgegebenen Schema verarbeitet wird.The guided missile uses the laser beam as a guide beam for driving the laser source. The steering or navigation of the missile is done so far using sensor data obtained from a scanning of the laser beam. A parameter of the laser beam, for example a scattered light intensity, can be used for navigation, for example by keeping the measured scattered light intensity constant during the approach or by processing it according to a predetermined scheme.
Der Lenkflugkörper fliegt zweckmäßigerweise im Laserstrahl und wird hierbei so gesteuert, dass er im Laserstrahl bleibt, sodass hierdurch das Fahrzeug während dieses Flugs zumindest teilweise vom Laserstrahl abgeschattet bleibt. Der Lenkflugkörper kann hierfür zumindest im Wesentlichen parallel zum Laserstrahl fliegen, worunter auch ein Pendeln im Laserstrahl verstanden werden kann, sodass der Laserstrahl zumindest teilweise auf den Lenkflugkörper gerichtet bleibt. Als auf den Lenkflugkörper gerichteter Laserstrahl kann ein den Lenkflugkörper treffender Laserstrahlkern verstanden werden, dessen Leistung pro Querschnittsfläche zumindest beispielsweise 30% der Maximalleistung pro Querschnittsfläche beträgt, wobei die Maximalleistung pro Querschnittsfläche am Ort des Lenkflugkörpers zu sehen ist, da die Leistung pro Querschnittsfläche mit wachsender Entfernung zur Laserquelle abnimmt.The missile expediently flies in the laser beam and is in this case controlled so that it remains in the laser beam, so that in this way the vehicle remains at least partially shaded by the laser beam during this flight. For this purpose, the guided missile can fly at least substantially parallel to the laser beam, which can also be understood to mean swaying in the laser beam, so that the laser beam at least partially remains directed at the guided missile. As directed to the guided missile laser beam can be understood the missile laser beam core whose power per cross-sectional area is at least for example 30% of the maximum power per cross-sectional area, the maximum power per cross-sectional area is to be seen at the location of the missile, since the power per cross-sectional area with increasing distance decreases to the laser source.
Das Verfahren ist besonders geeignet zum Einsatz gegen eine Hochenergielaserquelle beziehungsweise einen Hochenergielaserstrahl. Ebenfalls vorteilhaft ist eine Abwehr eines Störlasers. Hierfür ist der Sensor zweckmäßigerweise in einem Strahlungsspektrum sensitiv, das üblicherweise für Hochenergielaser oder Störlaser verwendet wird. Um die Erkennung von Streustrahlung zu vereinfachen, kann das Spektrum, in dem der Sensor sensitiv ist, auf ein Band um eine Laserwellenlänge beschränkt werden, die üblicherweise für Hochenergielaser verwendet wird. Beispielsweise liegt das Band maximal ± 100 nm um die Wellenlänge von 3800 nm herum. Außerdem erkennt der Sensor zweckmäßigerweise für Laserstrahlung typische Charakteristiken, wie beispielsweise das Vorliegen von kohärenter Strahlung. Weiter ist es vorteilhaft, wenn mittels bildverarbeitender Methoden eine Laserquelle als solche erkannt wird, beispielsweise anhand eines Bilds des Laserstrahls in der Luft oder anhand von Restwärmestrahlung bei ausgeschalteter Laserquelle. Hierfür ist vorteilhafterweise ein Bildsensor vorhanden, beispielsweise mit einem Matrixdetektor.The method is particularly suitable for use against a high energy laser source or a high energy laser beam. Also advantageous is a defense of a sturgeon laser. For this purpose, the sensor is expediently sensitive in a radiation spectrum which is usually used for high-energy lasers or interfering lasers. To facilitate detection of stray radiation, the spectrum in which the sensor is sensitive may be limited to a band about one laser wavelength commonly used for high energy lasers. For example, the band is at most ± 100 nm around the wavelength of 3800 nm. In addition, the sensor expediently recognizes characteristics typical of laser radiation, such as the presence of coherent radiation. Further, it is advantageous if by means of image processing methods, a laser source is recognized as such, for example, based on an image of the laser beam in the air or based on residual heat radiation when the laser source is switched off. For this purpose, an image sensor is advantageously present, for example with a matrix detector.
Das Fahrzeug ist vorzugsweise ein Luftfahrzeug, und kann Starrflügler oder ein Drehflügler, wie ein Hubschrauber sein. Die Erfindung ist jedoch auch zum Schützen eines Landfahrzeugs oder eines Wasserfahrzeugs vorteilhaft anwendbar. Das Fahrzeug kann ein bemanntes oder unbemanntes Fahrzeug sein.The vehicle is preferably an aircraft, and may be fixed-wing aircraft or a rotorcraft, such as a helicopter. However, the invention is also advantageously applicable for protecting a land vehicle or a watercraft. The vehicle may be a manned or unmanned vehicle.
Eine Steuereinheit des Fahrzeugs kann eine oder mehrere Recheneinheiten aufweisen, die im Fahrzeug an einer Stelle oder über das Fahrzeug verteilt angeordnet sein können. Die Steuereinheit erkennt den Laserstrahl zweckmäßigerweise als solchen und leitet einen Start des Flugkörpers in Abhängigkeit vom Erkennungsergebnis ein. Ist ein Laserstrahl als solcher erkannt und ist er zudem als bedrohlich für das Fahrzeug eingestuft, so wird der Flugkörper vom Fahrzeug aus gestartet. Wird ein Laserstrahl nicht als solcher erkannt oder als nicht bedrohlich klassifiziert, unterbleibt das Starten des Flugkörpers zweckmäßigerweise.A control unit of the vehicle may have one or more computing units, which may be arranged in the vehicle at a location or distributed over the vehicle. The control unit expediently recognizes the laser beam as such and initiates a start of the missile as a function of the recognition result. If a laser beam is recognized as such and it is also classified as threatening to the vehicle, the missile is launched from the vehicle. If a laser beam is not recognized as such or classified as non-threatening, the launching of the missile expediently fails.
Der Lenkflugkörper ist zweckmäßigerweise ein unbemannter Lenkflugkörper insbesondere mit einem Raketenmotor. Ebenfalls möglich ist ein Lenkflugkörper ohne einen eigenen Motor, beispielsweise in Form eines Lenkgeschosses. Der Lenkflugkörper umfasst zweckmäßigerweise eine Steuereinheit, die den Lenkflugkörper zur Laserquelle hin lenkt.The guided missile is expediently an unmanned guided missile, in particular with a rocket motor. Also possible is a missile without its own engine, for example in the form of a steering column. The missile expediently comprises a control unit which directs the missile towards the laser source.
Der Lenkflugkörper fliegt zur Laserquelle hin und nutzt hier den Laserstrahl zweckmäßigerweise als Leitstrahl zum Ansteuern der Laserquelle. Generell stehen hierfür mehrere Möglichkeiten zur Verfügung.The guided missile flies towards the laser source and utilizes the laser beam expediently as a guide beam for driving the laser source. In general, there are several options available.
In einer ersten Möglichkeit nimmt ein Sensor des Fahrzeugs oder ein Sensor des Flugkörpers ein Bild des Laserstrahls auf. Mittels bildverarbeitender Methoden kann hieraus der Standort der Laserquelle des Laserstrahls ermittelt werden. Beispielsweise wird aus dem Bild eine gerade Linie des Laserstrahls in der Umgebung bestimmt und ein definiertes Ende des Laserstrahls beziehungsweise der Linie wird bestimmt. Dies kann durch eine Steuereinheit des Fahrzeugs oder eine Steuereinheit des Lenkflugkörpers geschehen. Dieses Ende kann als Ort der Laserquelle bestimmt bzw. definiert werden, und der Lenkflugkörper kann diese Position ansteuern. Aus weiteren Parametern, beispielsweise, dass das Ende ein unteres Ende ist oder das Ende ein abruptes Ende ist, wohingegen der Laserstrahl in die andere Richtung kontinuierlich schwächer wird, kann davon ausgegangen werden, dass die Laserquelle an diesem Strahlende angeordnet ist. Entsprechend kann dieser Ort für die Lenkung des Lenkflugkörpers verwendet werden, der das Ende des Laserstrahls beziehungsweise den Ort anfliegt. Der Ort der Laserquelle kann vom Fahrzeug aus ermittelt und dem Lenkflugkörper übergeben werden. Der Ort kann alternativ oder zusätzlich vom Lenkflugkörper ermittelt werden.In a first possibility, a sensor of the vehicle or a sensor of the missile picks up an image of the laser beam. By means of image processing methods, the location of the laser source of the laser beam can be determined therefrom. For example, a straight line of the laser beam in the environment is determined from the image and a defined end of the laser beam or the line is determined. This can be done by a control unit of the vehicle or a control unit of the guided missile. This end can be defined as the location of the laser source, and the missile can drive that position. From other parameters, for example, that the end is a lower end or the end is an abrupt end, whereas the laser beam in the other direction continuously becomes weaker, it can be assumed that the laser source is arranged at this beam end. Accordingly, this location can be used for the steering of the missile, which flies to the end of the laser beam or the location. The location of the laser source can be determined from the vehicle and transferred to the guided missile. The location may alternatively or additionally be determined by the guided missile.
In einer zweiten Möglichkeit wird die Stärke von aus der Laserquelle in direkter Linie zum Flugkörper emittierte Strahlung als Messgröße aufgenommen. Ein Sensor wird auf die Laserquelle gerichtet und nimmt die von der Laserquelle in direkter Linie auf den Sensor geworfene Laserstrahlung auf. Durch Beugung und Streuung in der Laserquelle wird der Laserstrahl zu einem geringen Teil aufgeweitet, wobei die detektierte Laserintensität mit zunehmender Nähe zum Laserstrahl, also mit abnehmendem Winkel zur Raumrichtung des Laserstrahls, zunimmt. Ein Ansteigen der gemessenen Intensität der Laserstrahlung ist daher ein Zeichen für eine Annäherung an den Laserstrahl. Diese Methode erfordert eine Vorwärtssensorik, die den Nachteil aufweist, dass sie vom Laserstrahl direkt getroffen und zerstört werden kann. Ein Eintauchen in den Laserstrahl sollte daher vermieden werden.In a second possibility, the intensity of radiation emitted by the laser source in direct line to the missile is recorded as a measured variable. A sensor is aimed at the laser source and picks up the laser radiation thrown directly from the laser source onto the sensor. By diffraction and scattering in the laser source of the laser beam is widened to a small extent, the detected laser intensity increases with increasing proximity to the laser beam, ie with decreasing angle to the spatial direction of the laser beam. An increase in the measured intensity of the laser radiation is therefore a sign of an approach to the laser beam. This method requires a forward sensor, which has the disadvantage that it can be hit and destroyed directly by the laser beam. Immersion in the laser beam should therefore be avoided.
Dieser Nachteil kann durch eine dritte Möglichkeit umgangen werden, die auf der Messung in der Luft gestreuter Laserstrahlung beruht. Die Laserstrahlung wird auf ihrem Weg durch die Luft zu einem geringen Teil räumlich gestreut, sodass der Laserstrahl als Linie in der Landschaft sichtbar ist. Diese Intensität der Streustrahlung kann gemessen werden und nimmt mit abnehmender Entfernung zum Laserstrahl zu. Die Intensität kann als Steuergröße zur Lenkung des Lenkflugkörpers verwendet werden. Diese Methode hat den Vorteil, dass an der Umgebungsluft gestreute Laserstrahlung mit einer Seitwärtssensorik oder Rückwärtssensorik detektierbar ist, die beide nach vorne hin geschützt werden können. Unter einer Seitwärtssensorik wird im Folgenden eine ausschließlich in eine Seitenrichtung relativ zur Längsachse des Flugkörpers gerichtete Sensorik verstanden, die also nicht in Flugrichtung ausgerichtet ist, und eine Rückwärtssensorik ist genau entgegen der Flugrichtung des Lenkflugkörpers gerichtet, in der Regel auch in Seitenrichtung, jedoch ebenfalls nicht nach vorne.This disadvantage can be circumvented by a third possibility, which is based on the measurement in the air scattered laser radiation. The laser radiation is spatially scattered on its way through the air to a small extent, so that the laser beam is visible as a line in the landscape. This intensity of the scattered radiation can be measured and increases with decreasing distance to the laser beam. The intensity can be used as a control variable for steering the missile. This method has the advantage that laser radiation scattered in the ambient air can be detected with sideways or backward sensor systems, which can both be protected towards the front. Under a sideways sensor is understood below exclusively directed in a lateral direction relative to the longitudinal axis of the missile sensor system, which is not aligned in the direction of flight, and a reverse sensor is directed exactly opposite to the direction of flight of the missile, usually also in the lateral direction, but also not Forward.
Die Messung der Streustrahlung hat den weiteren Vorteil, dass sie sowohl von außerhalb des Laserstrahls als auch von innerhalb des Laserstrahls erfolgen kann und in beiden Fällen jeweils zur Lenkung des Lenkflugkörpers geeignet ist.The measurement of the scattered radiation has the further advantage that it can take place both from outside the laser beam and from within the laser beam and in both cases is suitable for steering the guided missile.
In einer vorteilhaften Ausgestaltung der Erfindung detektiert daher ein nach vorne blinder bzw. gegen den Laserstrahl abgeschatteter Sensor des Sensorsystems an der Umgebungsluft gestreute Laserstrahlung. Der Sensor ist zweckmäßigerweise Teil einer Seitwärtssensorik und/oder Rückwärtssensorik, sodass er nach vorne hin verdeckt ist. Hierzu umfasst der Lenkflugkörper zweckmäßigerweise ein Abschattungselement, beispielsweise eine Rumpfvorsprung, das den Sensor gegen von vorne auftreffende Laserstrahlung abschattet. Diese Abschattung besteht zweckmäßigerweise auch bei einem aktiv detektierenden Sensor, sodass es sich also nicht um beispielsweise Klappen handelt, die beim Aktivieren des Sensors geöffnet werden, sodass der Sensor ein freies Gesichtsfeld erhält.In an advantageous embodiment of the invention, therefore, detects a forward blind or against the laser beam shaded sensor of the sensor system scattered in the ambient air laser radiation. The sensor is expediently part of a sideways sensor system and / or backward sensor system, so that it is concealed towards the front. For this purpose, the guided missile expediently comprises a shading element, for example a fuselage projection, which shadows the sensor against laser radiation impinging from the front. This shading expediently also exists in the case of an actively detecting sensor, so that it is therefore not, for example, flaps that are opened when the sensor is activated so that the sensor receives a free field of view.
Eine vorteilhafte Möglichkeit einer solchen Abschattung besteht darin, dass das Abschattungselement eine Vertiefung im Außengehäuse des Lenkflugkörpers umfasst, und der Sensor in dieser Vertiefung angeordnet ist. Der Sensor kann nach hinten oder zur Seite ausgerichtet sein und verbleibt bei einem von vorne auf den Lenkflugkörper gerichteten Laserstrahl im Schatten der Vertiefung. Das Abschattungselement ist zweckmäßigerweise so ausgeführt, dass der gesamte optische Eingang des Sensors nach vorne hin abgeschattet ist.An advantageous possibility of such shading is that the shading element comprises a recess in the outer housing of the missile, and the sensor is arranged in this recess. The sensor can be oriented to the rear or to the side and remains in the shadow of the depression with a laser beam directed from the front onto the guided missile. The shading element is expediently designed so that the entire optical input of the sensor is shaded towards the front.
Der Lenkflugkörper fliegt zweckmäßigerweise innerhalb des Laserstrahls parallel zum Laserstrahl auf die Laserquelle zu. Er erzeugt hierbei einen Abschattungseffekt, der das Fahrzeug vor der Laserstrahlung zumindest teilweise schützt. Unter einem Fliegen im Laserstrahl kann hierbei verstanden werden, dass der Laserstrahl den Lenkflugkörper trifft, während der Lenkflugkörper parallel zum Laserstrahl fliegt.The missile expediently flies within the laser beam parallel to the laser beam to the laser source. In this case, it generates a shading effect which at least partially protects the vehicle from the laser radiation. By flying in the laser beam, it can be understood here that the laser beam hits the guided missile while the guided missile is flying parallel to the laser beam.
Um den Lenkflugkörper im Laserstrahl zu halten, ist es sinnvoll, wenn die Sensorik nicht nur eine Stärke der Laserstrahlung erkennt, sondern auch die Relativposition des Lenkflugkörpers relativ zur zentralen Achse des Laserstrahls. Dies kann in einer einfachen und vorteilhaften Weise erreicht werden mit mehreren über den Umfang eines Außengehäuses des Lenkflugkörpers verteilt angeordneten Sensoren, die während des Flugs Laserstrahl detektieren. Die Sensoren können auf einfache Weise so angeordnet werden, dass ein im Laserstrahl symmetrisch zentrierter Flug, also in der Mitte des Laserstrahls, zu gleichen Sensorsignalen der Sensoren führt, die Sensorsignale die Symmetrie der Position also wiedergeben. Wandert die Symmetrieachse des Laserstrahls jedoch in Richtung zu einem der Sensoren, so wird dessen Signal im Vergleich zu dem Signal der anderen Sensoren stärker, sodass erkannt werden kann, dass der Lenkflugkörper, also dessen Längsachse, außerhalb der Laserachse fliegt und auch, in welcher Richtung die Flugkörperachse relativ zur Laserachse liegt. Entsprechend wird der Flug des Lenkflugkörpers vorteilhafterweise so gesteuert, dass die detektierte Laserstrahlung bei allen Sensoren gleich ist. Je nach Bauart des Lenkflugkörpers und dessen Sensorik kann es ebenso vorteilhaft sein, wenn die von den Sensoren detektierten Laserstrahlungsstärken nicht zueinander gleich sind, sondern in einem vorbestimmten Verhältnis zueinander stehen.To keep the guided missile in the laser beam, it makes sense if the sensor not only detects a strength of the laser radiation, but also the relative position of the missile relative to the central axis of the laser beam. This can be achieved in a simple and advantageous manner with several distributed over the circumference of an outer housing of the missile arranged sensors that detect laser beam during the flight. The sensors can be arranged in a simple way so that a symmetrically centered in the laser beam flight, ie in the middle of the laser beam, leads to the same sensor signals of the sensors, the sensor signals thus reflect the symmetry of the position. However, if the axis of symmetry of the laser beam moves in the direction of one of the sensors, its signal becomes stronger in comparison with the signal of the other sensors, so that it can be recognized that the guided missile, that is to say its longitudinal axis, is outside the laser axis flies and also in which direction the missile axis is relative to the laser axis. Accordingly, the flight of the missile is advantageously controlled so that the detected laser radiation is the same for all sensors. Depending on the design of the missile and its sensor, it may also be advantageous if the laser radiation intensities detected by the sensors are not equal to each other, but are in a predetermined relationship to each other.
Einfach auswertbare Sensorsignale können erreicht werden, wenn das Sensorsystem zumindest drei über den Umfang des Außengehäuses verteilt angeordnete Sensoren aufweist, die beispielsweise schräg nach hinten ausgerichtet sind. Durch die Anordnung von vier jeweils 90° über den Umfang verteilte Sensoren kann ein Rechts- und Linksflug, beziehungsweise ein Flug nach oben und unten, noch leichter gesteuert werden.Easily evaluable sensor signals can be achieved if the sensor system has at least three sensors distributed over the circumference of the outer housing, which are aligned, for example, obliquely backwards. The arrangement of four each 90 ° circumferentially distributed sensors, a right and left-hand flight, or a flight up and down, even easier to control.
Um in der Luft gestreute Laserstrahlung besonders zuverlässig zur Navigation des Lenkflugkörpers verwenden zu können, ist es vorteilhaft, wenn ein Detektionsraumwinkelbereich des Sensors gegenstandsfrei ist. Es befindet sich mithin kein Element des Lenkflugkörpers in diesem Bereich, also im Gesichtsfeld des Sensors. Eine durch eine Reflexion verursachte Verfälschung des Messergebnisses kann hierdurch vermieden werden.In order to be able to use airborne laser radiation particularly reliably for navigation of the guided missile, it is advantageous if a detection space angle range of the sensor is free of objects. It is therefore no element of the missile in this area, ie in the field of view of the sensor. A falsification of the measurement result caused by a reflection can thereby be avoided.
Eine weitere Möglichkeit zum Steuern des Lenkflugkörpers in den Laserstrahl hinein, beziehungsweise zum Halten des Lenkflugkörpers im Laserstrahl, besteht darin, dass der Sensor auf eine äußere Streufläche gerichtet ist, die beispielsweise bei einem von vorne auf den Lenkflugkörper strahlendem Laserstrahl von diesem beleuchtet wird. Der Sensor kann hierdurch die Anwesenheit des Laserstrahls an dieser Streufläche erkennen.Another possibility for controlling the guided missile into the laser beam, or for holding the missile in the laser beam, is that the sensor is directed to an outer scattering surface, which is illuminated, for example, in a beam radiating from the front of the missile from the latter. The sensor can thereby detect the presence of the laser beam at this scattered surface.
Vorteilhafterweise umfasst der Lenkflugkörper ein Außengehäuse mit einer äußeren Streufläche, die zumindest zwei, insbesondere vier tangential zueinander versetzte Bereiche aufweist. Aus der Beleuchtung dieser Bereiche kann die Relativposition des Lenkflugköpers zur Laserstrahlachse in einfacher Weise und sehr schnell erkannt werden. Vorteilhafterweise ist eine Steuerung des Lenkflugkörpers davon abhängig, welcher der Bereiche vom Laserstrahl getroffen wird. Auch die Stärke, mit der mehrere Bereiche der Streufläche vom Laserstrahl getroffen werden, kann zur Steuerung des Lenkflugkörpers verwendet werden, insbesondere für eine Quantität der Lenkung, also eine Stärke eines Ausschlags eines Lenkruders des Lenkflugkörpers. Die Streuintensität der Bereiche der Streufläche kann als Eingangsgröße einer Flugregelung verwendet werden. Regelungsziel kann hierbei eine vorbestimmte, insbesondere gleichstarke Streuung der Bereiche der Streufläche sein. Hierdurch kann der Lenkflugkörper mittig im Laserstrahl gehalten werden.Advantageously, the guided missile comprises an outer housing with an outer scattering surface, which has at least two, in particular four tangentially offset regions. From the illumination of these areas, the relative position of the guided missile to the laser beam axis can be detected in a simple manner and very quickly. Advantageously, a control of the missile is dependent on which of the areas is hit by the laser beam. The strength with which several areas of the scattering surface are hit by the laser beam, can be used to control the missile, in particular for a quantity of steering, so a strength of a rash of a steering rudder of the missile. The Scattering intensity of the areas of the scattered surface can be used as the input variable of a flight control. In this case, the regulation objective may be a predetermined, in particular uniform, distribution of the areas of the scattering surface. As a result, the missile can be kept in the middle of the laser beam.
Die Bereiche der Streufläche können in zwei unterschiedliche Arten von Bereichen unterschieden werden, nämlich zwischen solchen Bereichen, die bei exakt vor vorne auf den Lenkflugkörper einstrahlendem Laserstrahl beleuchtet werden, und solchen Bereichen, die bei dieser parallelen Ausrichtung des Laserstrahls zur Lenkflugkörperachse nicht beleuchtet werden. Während mittels der ersten Bereiche eine seitliche Vorsetzung des Lenkflugkörpers zur Laserachse erfasst werden kann, kann mittels der zweiten Bereiche eine Winkelstellung der Lenkflugkörperachse zur Laserachse ermittelt werden. Hierfür sind die zweiten Bereiche zweckmäßigerweise so abgeschattet, beziehungsweise angeordnet, dass zumindest einer der Bereiche bei zur Laserachse angewinkelter Flugkörperachse vom Laserstrahl beleuchtet wird. Aus der Stärke der Beleuchtung des entsprechenden Bereichs kann zusätzlich zweckmäßigerweise die Winkelgröße bestimmt werden. Durchfliegt der Lenkflugkörper beispielsweise den Laserstrahl schräg, so kann die Winkelstellung des Flugkörpers zum Laserstrahl gemessen werden.The areas of the scattering surface can be distinguished into two different types of areas, namely those areas which are illuminated with a laser beam projecting exactly in front of the guided missile and those areas which are not illuminated in this parallel alignment of the laser beam with the missile axis. While by means of the first regions a lateral presetting of the guided missile to the laser axis can be detected, an angular position of the guided missile axis relative to the laser axis can be determined by means of the second regions. For this purpose, the second regions are expediently shaded or arranged such that at least one of the regions is illuminated by the laser beam when the missile axis is angled relative to the laser axis. From the strength of the illumination of the corresponding area, the angular size can additionally be suitably determined. For example, if the guided missile passes through the laser beam at an angle, the angular position of the missile relative to the laser beam can be measured.
Allgemein gefasst kann anhand einer Rückstreuintensität der Bereiche vorteilhafterweise einer Ausrichtung des Lenkflugkörpers zum Laserstrahl bestimmt werden, und zwar eine Versetzung und/oder Winkelstellung der Flugkörperachse zur Laserstrahlachse.Generally speaking, it can be advantageously determined by means of a backscatter intensity of the areas of an orientation of the guided missile to the laser beam, namely a displacement and / or angular position of the missile axis to the laser beam axis.
Eine quantitative Winkelbestimmung der Flugkörperachse zum Laserstrahl kann dadurch in einfacher Weise erreicht werden, wenn der Lenkflugkörper in einem Außengehäuse eine äußere Streufläche aufweist, die zumindest zwei radial zueinander versetzte Bereiche umfasst. Je größer der Winkel ist, desto tiefer reicht die auftreffende Laserstrahlung radial in die Streufläche hinein, sodass das Auftreffen des Laserstrahls in einem radial inneren Bereich einen größeren Winkel anzeigt, als das Auftreffen des Laserstrahls ausschließlich auf einem äußeren Bereich. Zweckmäßigerweise ist die Steuerung des Lenkflugkörpers davon abgängig, welcher der Bereiche vom Laserstrahl getroffen wird.A quantitative determination of the angle of the missile axis to the laser beam can be achieved in a simple manner, when the missile in an outer housing has an outer scattering surface which comprises at least two radially offset regions. The larger the angle, the deeper the incident laser radiation extends radially into the scattering surface, so that the impact of the laser beam in a radially inner region indicates a larger angle than the impact of the laser beam exclusively on an outer region. Appropriately, the control of the missile is dependent on which of the areas is hit by the laser beam.
Eine besonders schnelle Steuerung des Lenkflugkörpers anhand der Bereiche kann dadurch erreicht werden, wenn für jeden der Bereiche zumindest ein Sensor vorhanden ist, der auf diesen Bereich ausgerichtet ist, und dessen Blick vorteilhafterweise auf alle anderen Bereiche versperrt ist. Hierdurch können besonders einfache und schnelle Sensoren verwendet werden, sodass ein einfach auswertbares Messergebnis sehr schnell vorliegt.A particularly rapid control of the missile based on the areas can be achieved if at least one sensor for each of the areas which is oriented to this area and whose view is advantageously blocked to all other areas. As a result, particularly simple and fast sensors can be used so that an easily evaluable measurement result is available very quickly.
Der Schutz des Fahrzeugs durch den Lenkflugkörper kann auf zwei Arten erreicht werden: der Abschattung des Fahrzeugs durch den im Laserstrahl fliegenden Lenkflugkörper und die Zerstörung der Laserquelle durch den anfliegenden Lenkflugkörper. Der Abschattungsschutz kann noch vergrößert werden, wenn während des Flugs auf die Laserquelle ein Ausfahrelement das Außengehäuse überragend ausgefahren wird, sodass eine Abschattungsfläche des Lenkflugkörpers vergrößert wird. Die Abschattungsfläche bezieht sich hierbei auf die Silhouette des Lenkflugkörpers in einer Draufsicht von vorne. Zur Störung und möglichen Zerstörung der Laserquelle ist es außerdem vorteilhaft, wenn das Ausfahrelement nach vorne hin mit einer reflektiven Schicht versehen ist, insbesondere mit einer retroreflektiven Schicht, sodass das Ausfahrelement die auftreffende Laserstrahlung entgegen der Laserstrahlrichtung reflektiert. Das Ausfahrelement kann ein zu den Flügeln zusätzliches, bewegliches Element sein, ein Kragen oder dergleichen.The protection of the vehicle by the guided missile can be achieved in two ways: the shading of the vehicle by the missile flying in the laser beam and the destruction of the laser source by the approaching missile. The shading protection can be further increased if, during the flight to the laser source, an extension element, the outer housing is projecting outstanding, so that a shading surface of the missile is increased. The shading surface refers to the silhouette of the missile in a plan view from the front. For disturbance and possible destruction of the laser source, it is also advantageous if the extension element is provided forward with a reflective layer, in particular with a retroreflective layer, so that the extension element reflects the incident laser radiation counter to the laser beam direction. The extension element can be a movable element that is additional to the wings, a collar or the like.
Eine Abschattungsfläche des Lenkflugkörpers kann in erheblicher Weise vergrößert werden, wenn der Lenkflugkörper während des Flugs auf die Laserquelle Material wolkenförmig ausstößt. Dadurch dass der Lenkflugkörper parallel zum Laserstrahl fliegt, liegt auch der ausgestoßene Materialzylinder, beziehungsweise Materialkegel, parallel zur Laserausrichtung, sodass der Laser diesen auf gesamter Länge durchstoßen muss. Das Material kann Rauch aus einem Triebwerk, beziehungsweise einem Raketenmotor des Lenkflugkörpers sein, dem zum Treibmittel ein Rauchbildner zugesetzt ist. Besonders vorteilhaft kommt das Material aus einer zusätzlich zu einer Triebwerksöffnung vorhandenen Düse. Triebwerksschub und Rauchausstoß können hierbei unabhängig voneinander gesteuert werden.A shading surface of the missile can be significantly increased if the missile emits cloud-shaped material during the flight to the laser source. Due to the fact that the missile flies parallel to the laser beam, the ejected material cylinder, or cone of material, lies parallel to the laser alignment, so that the laser has to pierce it over its entire length. The material may be smoke from an engine, or a rocket engine of the guided missile, to which a smoke generator is added to the propellant. Particularly advantageously, the material comes from an existing addition to an engine opening nozzle. Engine thrust and smoke emissions can be controlled independently of each other.
Eine weitere Möglichkeit besteht darin, dass das Material vom Kopf des Lenkflugkörpers durch die auftreffende Laserstrahlung aus einer Ablationsschicht abgetragen wird. Die Rauchbildung ist dann automatisch auf solche Zeiträumer beschränkt, in denen der Laserstrahl der Lenkflugkörper trifft. Das Material wird hierbei besonders sparsam verwendet. Zur Störung, beziehungsweise Zerstörung der Laserquelle ist es außerdem vorteilhaft, wenn das Material Flitter zur Reflektion von Laserstrahlung enthält.Another possibility is that the material is removed from the head of the missile by the incident laser radiation from an ablation layer. The smoke is then automatically limited to such Zeiträumer where the laser beam hits the missile. The material is used very sparingly. To disturb, or destruction of the laser source, it is also advantageous if the material contains baubles for the reflection of laser radiation.
Wenn sich der Lenkflugkörper nicht exakt in der Mitte des Laserstrahls aufhält, sondern seitlich versetzt zum Laserstrahl fliegt, ist es vorteilhaft, wenn auch das Material nur in die Richtung zum Laserstrahl oder zumindest überwiegend in diese Richtung ausgestoßen wird. Hierfür ist es vorteilhaft, wenn das Material aus mehreren Düsen ausgestoßen wird, und eine Steuereinheit den Materialausstoß aus den einzelnen Düsen in Abhängigkeit der Lage des Lenkflugkörpers zum Laserstrahl steuert. Auf diese Weise kann das Material gezielt in Richtung zum Laserstrahl gelenkt und dieser gezielt getrübt werden.If the missile does not stay exactly in the middle of the laser beam, but flies laterally offset to the laser beam, it is advantageous if the material is ejected only in the direction of the laser beam or at least predominantly in this direction. For this purpose, it is advantageous if the material is ejected from a plurality of nozzles, and a control unit controls the ejection of material from the individual nozzles depending on the position of the missile to the laser beam. In this way, the material can be specifically directed in the direction of the laser beam and this targeted tarnished.
Laseroptiken- und Laserstrahlerzeuger sind in der Regel sehr empfindlich gegen Einfallen der Laserstrahlung. Eine Reflexion des Laserstrahls kann daher zur Zerstörung der Laserquelle führen, sodass das Fahrzeug auch hierdurch geschützt werden kann. Eine Möglichkeit zur Reflexion des Laserstrahls besteht darin, dass Laserstrahlung von einem Element des Lenkflugkörpers reflektiert wird, insbesondere durch einen Retro-Reflektor. Der Reflektor kann an der Spitze des Lenkflugkörpers und/oder unter einem Dom des Lenkflugkörpers abgeordnet sein. Liegt der Reflektor hinter einem Dom, so sollten Verdampfungsgase, die bei einer Zerstörung des Reflektors entstehen, aus einem Innenraum hinter dem Dom durch Öffnungen nach außen geführt werden, also in einen Umgebungsbereich des Lenkflugkörpers. Der Lenkflugkörper umfasst insofern zweckmäßigerweise einen Dom mit einem dahinter angeordneten Raum, der über Öffnungen mit der Umgebung des Lenkflugkörpers für einen Druckausgleich verbunden ist. In diesem Raum kann ein Reflexionselement und/oder eine Ablationsschicht angeordnet sein.Laser optics and laser beam generators are usually very sensitive to collapse of the laser radiation. A reflection of the laser beam can therefore lead to the destruction of the laser source, so that the vehicle can also be protected thereby. One possibility for reflection of the laser beam is that laser radiation is reflected by an element of the guided missile, in particular by a retro-reflector. The reflector may be located at the tip of the missile and / or under a dome of the missile. If the reflector is behind a dome, evaporating gases which are produced when the reflector is destroyed should be led out of an interior space behind the dome through openings, ie into a surrounding area of the guided missile. The missile thus expediently comprises a dome with a space arranged behind it, which is connected via openings with the surroundings of the missile for pressure equalization. In this space, a reflection element and / or an ablation layer can be arranged.
Die Erfindung ist außerdem gerichtet auf einen Lenkflugkörper mit einem Außengehäuse, einer Spitze, einem Lenksystem und einem in die Umgebung gerichteten Sensor.The invention is also directed to a missile having an outer housing, a tip, a steering system and an environmental sensor.
Um einen wirkungsvollen Schutz eines Fahrzeugs vor einem Angriff durch einen Laserstrahl zu erreichen, ist der Sensor erfindungsgemäß zur Detektion von Laserstrahlung eines Laserstrahls ausgeführt, und der Lenkflugkörper ist weiter erfindungsgemäß mit einer Steuereinheit ausgerüstet, die dazu vorbereitet ist, unter Verwendung der Daten des Sensorsystems das Lenksystem so anzusteuern, dass die Spitze des Lenkflugkörpers im Laserstrahl verbleibend auf die Laserquelle zusteuert.In order to achieve effective protection of a vehicle against attack by a laser beam, the sensor according to the invention for detecting laser radiation of a laser beam is executed, and the missile is further equipped according to the invention with a control unit, which is prepared using the data of the sensor system To steer steering system so that the tip of the guided missile in the laser beam is left on the laser source.
Vorteilhafterweise umfasst der Lenkflugkörper einen Wirkteil mit einer Detonationsladung. Die Detonationsladung kann Splittermaterial enthalten, wobei die Detonationsladung und Splittermaterial zweckmäßigerweise so zueinander angeordnet sind, dass das Splittermaterial bei einer Detonation der Detonationsladung in einem Kegel nach vorne geschleudert wird. Die Zündung der Detonationsladung kann durch einen Aufschlagzünder oder einen Annäherungszünder erfolgen, der im Flugkörperkopf angeordnet ist.Advantageously, the guided missile comprises an active part with a detonation charge. The detonation charge may contain splinter material, the Detonation charge and splinter material are expediently arranged to each other so that the splinter material is thrown in a detonation of the detonation charge in a cone forward. Ignition of the detonation charge may be by a percussion fuse or proximity detonator located in the missile head.
Die bisher gegebene Beschreibung vorteilhafter Ausgestaltungen der Erfindung enthält zahlreiche Merkmale, die in einigen abhängigen Ansprüchen zu mehreren zusammengefasst wiedergegeben sind. Diese Merkmale können jedoch zweckmäßigerweise auch einzeln betrachtet und zu sinnvollen weiteren Kombinationen zusammengefasst werden, insbesondere bei Rückbezügen von Ansprüchen, sodass ein einzelnes Merkmal eines abhängigen Anspruchs mit einem einzelnen, mehreren oder allen Merkmalen eines anderen abhängigen Anspruchs kombinierbar ist. Außerdem sind diese Merkmale jeweils einzeln und in beliebiger geeigneter Kombination sowohl mit dem erfindungsgemäßen Verfahren als auch mit der erfindungsgemäßen Vorrichtung gemäß den unabhängigen Ansprüchen kombinierbar. So sind Verfahrensmerkmale auch als Eigenschaften der entsprechenden Vorrichtungseinheit gegenständlich formuliert zu sehen und funktionale Vorrichtungsmerkmale auch als entsprechende Verfahrensmerkmale.The description of advantageous embodiments of the invention given so far contains numerous features that are summarized in several dependent claims in several groups. However, these features may conveniently be considered individually and grouped together into meaningful further combinations, in particular when reclaiming claims, so that a single feature of a dependent claim can be combined with a single, several or all features of another dependent claim. In addition, these features can be combined individually and in any suitable combination both with the method according to the invention and with the device according to the invention according to the independent claims. Thus, process features can also be formulated objectively as properties of the corresponding device unit and functional device features also as corresponding process features.
Die oben beschriebenen Eigenschaften, Merkmale und Vorteile dieser Erfindung sowie die Art und Weise, wie diese erreicht werden, werden klarer und deutlicher verständlich in Zusammenhang mit der folgenden Beschreibung der Ausführungsbeispiele, die im Zusammenhang mit den Zeichnungen näher erläutert werden. Die Ausführungsbeispiele dienen der Erläuterung der Erfindung und beschränken die Erfindung nicht auf die darin angegebene Kombination von Merkmalen, auch nicht in Bezug auf funktionale Merkmale. Außerdem können dazu geeignete Merkmale eines jeden Ausführungsbeispiels auch explizit isoliert betrachtet, aus einem Ausführungsbeispiel entfernt, in ein anderes Ausführungsbeispiel zu dessen Ergänzung eingebracht und/oder mit einem beliebigen der Ansprüche kombiniert werden.The above-described characteristics, features, and advantages of this invention, as well as the manner in which they are achieved, will become clearer and more clearly understood in connection with the following description of the embodiments, which will be described in detail in conjunction with the drawings. The embodiments serve to illustrate the invention and do not limit the invention to the combination of features specified therein, not even with respect to functional features. In addition, suitable features of each embodiment may also be explicitly considered isolated, removed from one embodiment, incorporated into another embodiment to complement it, and / or combined with any of the claims.
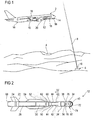
Es zeigen:
- FIG 1
- ein Luftfahrzeug mit Lenkflugkörpern zur Verteidigung gegen einen Angriff durch ein Lasersystem,
- FIG 2
- einen der Lenkflugkörper mit mehreren Sensoren zum Detektieren von Laserstrahlung,
- FIG 3
- eine Verteidigung des Fahrzeugs durch einen Lenkflugkörper und
- FIG 4
- den Lenkflugkörper aus
FIG 2 in einem Querschnitt.
- FIG. 1
- an aircraft with guided missiles for defense against attack by a laser system,
- FIG. 2
- one of the missiles with several sensors for detecting laser radiation,
- FIG. 3
- a defense of the vehicle by a guided missile and
- FIG. 4
- the guided missile
FIG. 2 in a cross section.
Das Lasersystem 6 ist ein Hochenergielasersystem, das den Laserstrahl 8 vorwiegend im infraroten Spektralbereich aussendet, beispielsweise bei 3,8 µm, wobei der Laserstrahl 8 über eine Distanz von mehreren Kilometern genügend Energie transportiert, um empfindliche Teile des Luftfahrzeugs zu zerstören und hierdurch dessen Flugfähigkeit akut zu gefährden. Das Lasersystem 6 dient zum Bekämpfen von Luftfahrzeugen und weist eine Steuereinheit auf, die den Laserstrahl 8 auf das Fahrzeug 2 schwenkt und den Laserstrahl 8 automatisiert der Bewegung des Luftfahrzeugs 2 nachführt. In der Steuereinheit ist eine lasersensitive Stelle des Fahrzeugs 2 hinterlegt, auf die der Laserstrahl 8 mittels bildverarbeitender Methoden automatisch gerichtet wird, um die im Lasersystem 6 bildhaft hinterlegte Stelle des Luftfahrzeugs 2 über einen Zeitraum von einigen Sekunden zu bestrahlen und hierdurch zu zerstören.The
Anstelle des Hochenergielasersystems 6 kann ein Designatorlasersystem bzw. Markierlasersystem bekämpft oder gestört werden, das das Fahrzeug 2 anleuchtet, um einen Lenkflugkörper in das Fahrzeug 2 zu steuern. Durch eine Abschattung des Fahrzeugs 2 und/oder eine Zerstörung der Laserquelle 10 kann diese Markierung gestört werden, so dass der angreifende Lenkflugkörper das Fahrzeug 2 nicht finden kann. Die folgende Beschreibung bezieht sich auf ein stationäres Hochenergielasersystem 6, ohne dass damit eine Einschränkung auf dieses System verbunden wäre.Instead of the high-
Zum Schützen des Fahrzeugs 2 weist dieses zumindest einen Flugkörper 12 auf, wobei in
Zum Schutz des Luftfahrzeugs überwachen die Sensoren 16 des Sensorsystems 14 aktiv den Luftraum nach Laserstrahlung. Die Sensoren 16 umfassen jeweils eubeb Bildsensor hinter einer 180°-Optik, sodass die Szenerie einer Halbkugel des Umraums auf ein lasersensitives Element abgebildet wird. Hierdurch kann ein Bild des Laserstrahls 8 in der Umgebung aufgenommen werden, und hieraus können weitere Informationen zum Laserstrahl 8 ermittelt werden, wie Geometrie, Lage und Intensität des Laserstrahls. Aus der Geometrie erkennt die Steuereinheit 18 des Sensorsystems 14 insbesondere mittels bildverarbeitender Methoden den Laserstrahl 8 als solchen. Als geometrische Merkmale können verwendet werden, dass der Laserstrahl 8 als gerader Strich in der Landschaft gesehen wird. Außerdem weist er ein scharf begrenztes Ende an der Laserquelle 10 auf. An seinem anderen Ende wird der Laserstrahl jedoch - sofern er nicht auf einen Gegenstand trifft - immer schwächer, wie in
Aus den geometrischen Daten des Laserstrahls 8 sowie dessen Spektrum und Strahlungsintensität klassifiziert die Steuereinheit 18 den Laserstrahl 8 zunächst in die drei Stufen harmlos, potentiell gefährlich und gefährlich. Bei einer Klassifikation in die Stufe harmlos wird der Laserstrahl 8 weiter beobachtet, jedoch wird die Laserquelle 10 nicht bekämpft. Bei einer Klassifikation in eine der beiden anderen Stufen wird eine Abschattung und/oder Bekämpfung vorbereitet. Hierzu wird ein Kanister 20, der zumindest einen der Flugkörper 12 beherbergt, in die Richtung der Laserquelle 10 verschwenkt. Diese Verschwenkbarkeit ist in
Für eine Bekämpfung der Laserquelle 10 ist es vorteilhaft, wenn die Position der Laserquelle 10 bekannt ist. Diese ermittelt die Steuereinheit 18 beispielsweise aus der Geometrie des Laserstrahls 8. So kann an der Stelle des abrupten Endes des Laserstrahls 8 die Laserquelle 10 vermutet werden. Außerdem kann dem Laserstrahl 8 eine Richtung gegeben werden, zumindest eine grobe Richtung oben und unten, wobei die Laserquelle 10 nur an einem unteren Ende des Laserstrahls 8 positioniert ist. Auf diese Weise kann eine Richtung der Laserquelle 10 relativ zum Luftfahrzeug 2 ermittelt werden. Aus der Richtung und einer Flughöhe des Luftfahrzeugs und zweckmäßigerweise einer Topografie der überflogenen Landschaft 4, kann auch die Entfernung zwischen Luftfahrzeug und Laserquelle 10 bestimmt werden, insbesondere werden die absoluten geografischen Koordinaten der Laserquelle 10 bestimmt. Die Erkennung des Laserstrahls 8 erfolgt insofern durch eine Aufnahme des Laserstrahls 8 von der Seite, wobei aus dem Laserstrahl 8 an der Atmosphäre gestreute Laserstrahlung aufgenommen wird.For controlling the
Für den Fall, dass der Laserstrahl 8 bereits auf das Luftfahrzeug 2 gerichtet ist und somit das undefinierte obere Ende nicht mehr als solches zu erkennen ist und der Laserstrahl 8 sowohl oben als auch unten ein abruptes Ende aufweist, kann die Ermittlung der Position der Laserquelle 10 durch einen anderen der Sensoren 16 des Sensorsystems 14 vorgenommen werden, beispielsweise durch einen Sensor 16 an einem Flügel des Luftfahrzeugs 2. Dieser erkennt den Laserstrahl 8 an sich und beide abrupte Enden, wobei die Steuereinheit 18 das untere abrupte Ende des Laserstrahls 8 als Standort der Laserquelle 10 auswählt. Ebenfalls möglich ist eine Positionsbestimmung der Laserquelle 10 mittels Triangulation. Sobald drei oder mehr Sensoren 16 den Laserstrahl 8 erkannt und dessen unteres abruptes Ende bestimmt haben, kann neben der Richtung der Laserquelle 10 auch deren Entfernung durch die bekannte Ausrichtung der Sensoren 16 am Luftfahrzeug 2 zueinander bestimmt werden.In the event that the
Zum Schutz des Luftfahrzeugs wird nun zumindest ein Flugkörper 12 vom Luftfahrzeug gestartet. Die Steuerung des Starts übernimmt die Steuereinheit 18 des Sensorsystems 14, die auch ein Teil einer zentralen Fahrzeugsteuerung des Fahrzeugs 2 sein kann.To protect the aircraft, at least one
Im Flugkörperkopf ist ein Sensor 32 angeordnet, der ein bildgebender Infrarotsensor ist. Der Sensor 32 umfasst eine Optik 34 und einen Matrixdetektor 36. Ein Filter 38 dient zum Abschatten des Detektors 36. Der Detektor 36 ist auf einer nicht dargestellten Kühleinheit angeordnet und signaltechnisch mit der Steuereinheit 26 verbunden. Zum weiteren Schutz des Sensors 32 ist in dessen Detektionsbereich eine Abdeckung 40 angeordnet, die zwei zueinander bewegliche Schalenelemente umfasst, die federgetrieben gegeneinander bewegt werden. Sie verdecken den Detektionsbereich des Sensors 32 im geschlossenen Zustand vollständig und schirmen den Sensor 32 vor einfallender Laserstrahlung so weit ab, dass der Sensor 32 bei direkt vom Laserstrahl 8 beleuchteten Zustand über einen Zeitraum von zumindest 10 Sekunden hinter der Abdeckung 40 funktionsfähig bleibt.
Der Filter 38 ist ein intensitätsabhängiger Filter, der selbsttätig in Abhängigkeit von der Intensität der einfallenden Laserstrahlung abschattet. Übersteigt die Intensität einen Grenzwert, so wird der Filter 38 selbstständig undurchlässig und schützt hierdurch den dahinterliegenden Detektor 36 sehr schnell. Außerdem sendet der Filter 38 ein Signal an die Steuereinheit 26, die daraufhin unverzüglich die Abdeckung 40 schließt und so auch einen zusätzlichen mechanischen Schutz des Sensors 32 bewirkt.The
Zusätzlich oder alternativ zum Sensor 32 umfasst der Lenkflugkörper einen oder mehrere der nachfolgend beschriebenen Sensoren 42, 44, 46, 48, die in
Zunächst enthält der Lenkflugkörper 12 vier Sensoren 42, die über den Umfang des Lenkflugkörpers 12 in einem Abstand von jeweils 90° zueinander angeordnet sind. In
Entsprechend der Sensorsignale des Sensors 42 veranlasst die Steuereinheit 26 den Flug des Lenkflugkörpers 12 zum Laserstrahl 8 hin. Die Richtung ergibt sich aus einer Kombination der Richtung derjenigen Sensoren 42, die das stärkste Streulichtsignal der Laserstrahlung empfangen.According to the sensor signals of the
Sobald der Lenkflugkörper 12 in den Laserstrahl 8 eintaucht und somit vom Laserstrahl 8 direkt getroffen wird, wird eine Feinsteuerung anhand der Sensoren 44, 46 und/oder 48 vorgenommen, die gemeinsam oder nur einzeln im Lenkflugkörper 12 vorhanden sind. Die Sensoren 44 bilden - wie die Sensoren 42, 46 und 48 - eine Gruppe einer Mehrzahl von Sensoren, im gezeigten Ausführungsbeispiel vier Sensoren, die im Umfang des Lenkflugkörpers 12 gleichmäßig tangential voneinander beabstandet an der Außenhülle des Lenkflugkörpers 12 angeordnet sind. Im gezeigten Ausführungsbeispiel hat eine Sensorgruppe vier Sensoren 42, 44, 46, 48, die tangential 90° voneinander beabstandet sind. Sämtliche Sensoren 42, 44, 46, 48 sind in einer oder mehreren Vertiefungen 50 in der Außenhülle des Lenkflugkörpers 12 angeordnet und sind somit nach vorne abgeschattet. Ein von vorne auf den Lenkflugkörper 12 auftreffender Laserstrahl 8 kann somit die Sensoren 42 - 48 nicht erreichen. Auch bei einer Verkippung von bis 30° der Flugkörperachse zur Achse des Laserstrahls 8 bleiben die Sensoren 42 - 48 vom Laserstrahl 8 abgeschattet.As soon as the guided
Die Sensoren 44 haben ein Gesichtsfeld 52, das in
Der Flug des Lenkflugkörpers 12 wird so gesteuert, dass er möglichst tief in den Laserstrahl 8 taucht, also insbesondere mittig im Laserstrahl 8 liegt. Der Lenkflugkörper 12 fliegt hierbei parallel zum Laserstrahl 8 in diesem zur Laserquelle 10 hin. Hierdurch wird das Fahrzeug 2 durch den Flugkörper 12 vom Laserstrahl 8 abgeschattet und somit geschützt.The flight of the guided
Durch die auf die Finnen 54 gerichteten Gesichtsfelder 52 der Sensoren 44 kann der Lenkflugkörper zentriert im Laserstrahl 8 gehalten werden. Dies geschieht, indem die Sensorsignale der Sensoren 44 als Regeleingang zur Lenkregelung des Lenkflugkörpers 12 verwendet werden. Als Lenkziel sollen die Signale der Sensoren 44 gleich sein, sodass also alle Finnen 54 gleich stark beleuchtet werden. Dies ist ein Zeichen für einen mittigen beziehungsweise zentrierten Flug des Lenkflugkörpers 12 im Laserstrahl 8.By directed onto the
Durch Querwind, Lenkfehler, Verschwenkungsbewegungen des Laserstrahls 8 und dergleichen wird die Flugkörperachse während des Flugs immer wieder zur Achse des Laserstrahls 8 verkippen. Eine solche Verkippung ist durch die Beleuchtung der Finnen 54 nicht unmittelbar zu erkennen. Zur Erkennung einer solchen Verkippung dienen die Sensoren 46. Jeder der Sensoren 46 weist ein Gesichtsfeld 56 auf, das in
Ist nun der Lenkflugkörper 12 zum Laserstrahl 8 verkippt und wird von diesem getroffen, so wird der Laserstrahl 8 zumindest den äußeren Bereich 62 direkt beleuchten. Dies wird durch die Sensoren 46 erkannt. Aus der tangentialen Anordnung zueinander kann die Richtung bestimmt werden, in der die Flugkörperachse zum Laserstrahl 8 beziehungsweise dessen Achse verkippt ist. Außerdem steigt die Verkippung mit wachsender Intensität des Sensorsignals der betreffenden Sensoren 46 an.Now, if the guided
Bei noch weiter steigender Verkippung trifft der Laserstrahl 8 den inneren Bereich 60 der Schräge 58, wodurch die Sensoren 48 ein entsprechendes Signal ausgeben. Wiederum steigt die Verkippung mit wachsendem Sensorsignal an. Aus den Signalen der Sensoren 46, 48 kann mithin die Richtung der Verkippung und die Stärke der Verkippung der Flugkörperachse zur Ausrichtung des Laserstrahls 8 bestimmt werden. Die Lenkung beziehungsweise die Lenkflügel 22 werden unter Verwendung der Sensorsignale angesteuert und die Verkippung wird hierdurch reduziert, insbesondere bis ein Parallelflug des Lenkflugkörpers 12 zum Laserstrahl 8 erreicht wird.With still increasing tilting of the
Der Schutz der Abschattung des Fahrzeugs 2 vor dem Laserstrahl 8 durch den Lenkflugkörper 12 wird durch den Ausstoß von Material 66 aus vier Düsen 68 verstärkt. Auch diese sind tangential über den Umfang der Außenhülle des Lenkflugkörpers 12 verteilt und am hinteren Ende des Lenkflugkörpers 12 angeordnet, wie in
Alternativ oder zusätzlich zu den Düsen 68 kann der Lenkflugkörper 12 an seiner Vorderseite Ablationsmaterial 72 tragen. Trifft der Laserstrahl 8 auf das Ablationsmaterial 72, so verbrennt dieses beziehungsweise löst sich in Rauch auf. Der Rauch hat den gleichen Effekt wie das Material 66 und kann auch mit Flittermaterial versehen sein, das in das Ablationsmaterial 72 eingearbeitet ist.As an alternative or in addition to the
Als einen weiteren Angriff auf die Laserquelle 10 kann der vordere Teil des Lenkflugkörpers 12 mit einer Reflexionsschicht versehen sein, die beispielsweise auf die Ablationsschicht 72, auf einen Dom 74 oder eine andere nach vorne weisende Stelle des Lenkflugkörpers 12 aufgebracht ist. Diese zweckmäßigerweise retroreflektierende Schicht wirft das Laserlicht in entgegengesetzte Richtung und somit auf die Laserquelle 10 zurück zur Störung oder Zerstörung dieser. Bei direktem Auftreffen des Laserstrahls 8 auf die Reflexionsschicht wird diese zwar sehr schnell zerstört, reflektiert das Laserlicht jedoch für einige 10 bis 100 ms, sodass der Lenkflugkörper 12 beim ersten Treffer durch den Laserstrahl 8 stark zurückblitzt. Die Ablationsschicht 72 ist zweckmäßigerweise alternativ zum Sensor 32 vorhanden, um diesem das Bildfeld nach vorn nicht zu versperren.As a further attack on the
Zur Ablationsschicht 72 alternativ kann Ablationsmaterial und/oder eine Reflexionsschicht unterhalb des Doms 74 des Lenkflugkörpers 12 angeordnet sein, beispielsweise auf der Außenseite der Abdeckung 40. In diesem Fall können Ablationsmaterial 72 auf der Abdeckung 40 und der Sensor 32 miteinander kombiniert werden. Ein Verdampfen des Ablationsmaterials 72 unterhalb des Doms 74 würde jedoch zu einem erhöhten Innendruck innerhalb des Flugkörpers 12 führen. Zur Abführung des Überdrucks enthält der Flugkörper 12 daher Öffnungen 76, aus denen der entstehende Rauch abgeführt wird.
Um eine Bekämpfung durch den Lenkflugkörper 12 zu stören oder zu vermeiden, kann es sein, dass das Lasersystem 6 die Laserquelle 10 ausschaltet, sodass der Laserstrahl 8 verschwindet. Eine Leitung des Fluges des Lenkflugkörpers 12 entlang des Laserstrahls 8 ist nun nicht mehr möglich. Dieses Ausschalten wird jedoch durch die Sensoren 42 - 48 erkannt. Die Abdeckung 40 öffnet und gewährt dem Sensor 32 einen Blick nach vorne. Der Sensor 32 sucht nach Wärmequellen in seinem Gesichtsfeld. Aufgefundene Wärmequellen werden mit in einer Datenbank gespeicherten Daten, insbesondere Bildern von bekannten Wärmequellen, verglichen. Hierbei wird die Zeitdauer, die seit dem Abschalten des Laserstrahls 8 vergangen ist, berücksichtigt. Kann das Bild einer vom Sensor 32 erkannten Wärmequelle einem hinterlegten Bild einer Laserquelle 10 zugeordnet werden, so wird die Lage der Wärmequelle als neues Ziel aufgenommen, und der Lenkflugkörper 12 steuert die Wärmequelle zu deren Zerstörung an.In order to disturb or avoid a fight by the guided
Um einer Zerstörung des Sensors 32 zuvorzukommen, öffnet die Abdeckung 40 nur für einen kurzen Zeitraum und schließt dann wieder zum Schutz des Sensors 32. Eine Öffnungsdauer von 50 ms reicht hierbei aus, um die Laserquelle 10 zu finden, zu identifizieren und deren Richtung festzustellen. Der Lenkflugkörper 12 kann nun anhand dieser Daten in die Laserquelle 10 hineinfliegen. Um eine Zerstörung des Sensors 32 durch ein nur kurzfristiges Ausschalten der Laserquelle 10 zu vermeiden, öffnet die Abdeckung 40 erst nach einer voreingestellten Weile nach Abschalten der Laserquelle 10. Diese voreingestellte Zeit kann von Lenkflugkörper 12 zu Lenkflugkörper 12 verschieden sein, damit das Lasersystem 6 die Öffnungszeit nach Abschalten der Laserquelle 10 nicht kennt. Nach Ablaufen der Wartezeit öffnet die Abdeckung 40 für die voreingestellte Zeit, beispielsweise 50 ms und schließt wieder. Der Sensor 32 ist gegen ein Wiederaufflammen des Laserstrahls 8 geschützt.In order to prevent destruction of the
Ein Aktivieren des Sensors 32 ist auch möglich, wenn der Laserstrahl 8 ausreichend weit vom Flugkörper 12 entfernt ist, beispielsweise weil der Laserstrahl 8 weit verschwenkt wurde. Auch hierdurch kann die Laserquelle 10 direkt erfasst und somit leichter angesteuert werden. Der Abstand des Lenkflugkörpers 12 zum Laserstrahl 8 wird durch die Sensoren 42 abgeschätzt, und die Steuereinheit 26 öffnet die Abdeckung 40 in Abhängigkeit vom Sensorsignal.Activation of the
- 22
- Fahrzeugvehicle
- 44
- Landschaftlandscape
- 66
- Lasersystemlaser system
- 88th
- Laserstrahllaser beam
- 1010
- Laserquellelaser source
- 1212
- LenkflugkörperMissile
- 1414
- Sensorsystemsensor system
- 1616
- Sensorsensor
- 1818
- Steuereinheitcontrol unit
- 2020
- Kanistercanister
- 2222
- Lenkflügelsteering wings
- 2424
- Aktuatoractuator
- 2626
- Steuereinheitcontrol unit
- 2828
- Raketenmotorrocket engine
- 3030
- Wirkteilactive part
- 3232
- Sensorsensor
- 3434
- Optikoptics
- 3636
- Matrixdetektormatrix detector
- 3838
- Filterfilter
- 4040
- Abdeckungcover
- 4242
- Sensorsensor
- 4444
- Sensorsensor
- 4646
- Sensorsensor
- 4848
- Sensorsensor
- 5050
- Vertiefungdeepening
- 5252
- GesichtsfeldFacial field
- 5454
- Finnefin
- 5656
- GesichtsfeldFacial field
- 5858
- Schrägeslope
- 6060
- BereichArea
- 6262
- BereichArea
- 6464
- GesichtsfeldFacial field
- 6666
- Materialmaterial
- 6868
- Düsejet
- 7070
- Laserstrahlunglaser radiation
- 7272
- Ablationsmaterialablative
- 7474
- Domcathedral
- 7676
- Öffnungopening
Claims (16)
dadurch gekennzeichnet,
dass ein gegen den Laserstrahl (8) abgeschatteter Sensor (16, 42, 44, 46, 48) an der Umgebungsluft gestreute Laserstrahlung detektiert.Method according to claim 1,
characterized,
in that a sensor (16, 42, 44, 46, 48) which is shaded against the laser beam (8) detects scattered laser radiation in the ambient air.
dadurch gekennzeichnet,
dass mehrere über den Umfang eines Außengehäuses des Lenkflugkörpers (12) verteilt angeordnete Sensoren (42, 44, 46, 48) Laserstrahlung detektieren und der Flug des Lenkflugkörpers (12) so gesteuert wird, dass die detektierte Laserstrahlung bei allen Sensoren (42, 44, 46, 48) gleich ist.Method according to claim 1 or 2,
characterized,
a plurality of sensors (42, 44, 46, 48) distributed over the circumference of an outer housing of the guided missile (12) detect laser radiation and the flight of the missile (12) is controlled such that the detected laser radiation is detected in all sensors (42, 44, 46, 48) is the same.
dadurch gekennzeichnet,
dass der Lenkflugkörper (12) ein Außengehäuse mit einer äußeren Streufläche (58) aufweist, die zumindest zwei tangential zueinander versetzte Bereiche (52, 60, 62) umfasst, und der Flug des Lenkflugkörpers (12) in Abhängigkeit davon gesteuert wird, welcher der Bereiche (52, 60, 62) vom Laserstrahl (8) getroffen wird.Method according to one of the preceding claims,
characterized,
in that the guided missile (12) has an outer casing with an outer scattering surface (58) comprising at least two tangentially offset regions (52, 60, 62) and the flight of the guided missile (12) is controlled depending on which of the regions (52, 60, 62) is hit by the laser beam (8).
dadurch gekennzeichnet,
dass der Lenkflugkörper (12) ein Außengehäuse mit einer äußeren Streufläche (58) aufweist, die zumindest zwei radial zueinander versetzte Bereiche (52, 60, 62) aufweist und eine Steuerung des Lenkflugkörpers (12) davon abhängig ist, welcher der Bereiche (52, 60, 62) vom Laserstrahl (8) getroffen wird.Method according to one of the preceding claims,
characterized,
in that the guided missile (12) has an outer housing with an outer scattering surface (58) which has at least two radially offset regions (52, 60, 62). and control of the missile (12) is dependent on which of the regions (52, 60, 62) is hit by the laser beam (8).
dadurch gekennzeichnet,
dass anhand einer Rückstreuintensität der Bereiche (52, 60, 62) eine Ausrichtung des Lenkflugkörpers (12) zum Laserstrahl (8) bestimmt wird.Method according to claim 4 or 5,
characterized,
in that an alignment of the guided missile (12) with the laser beam (8) is determined on the basis of a backscatter intensity of the regions (52, 60, 62).
dadurch gekennzeichnet,
dass für jeden der Bereiche (52, 60, 62) zumindest ein Sensor (44, 46, 48) vorhanden ist, der auf diesen Bereich (52, 60, 62) ausgerichtet ist und dessen Blick auf den anderen Bereich (60, 62, 52) versperrt ist.Method according to one of claims 4 to 6,
characterized,
in that for each of the regions (52, 60, 62) there is at least one sensor (44, 46, 48) which is aligned with this region (52, 60, 62) and whose view of the other region (60, 62, 52) is locked.
dadurch gekennzeichnet,
dass der Lenkflugkörper (12) während des Flugs auf die Laserquelle (10) Material (66) wolkenförmig ausstößt, sodass hierdurch eine Abschattungsfläche vergrößert wird.Method according to one of the preceding claims,
characterized,
that the guided missile (12) during the flight of the laser source (10) material (66) emits clouds shaped, so that thereby a Abschattungsfläche is increased.
dadurch gekennzeichnet,
dass das Material (66) aus mehreren Düsen (68) ausgestoßen wird, und eine Steuereinheit (26) den Materialausstoß aus den einzelnen Düsen (68) in Abhängigkeit der Lage des Lenkflugkörpers (12) zum Laserstrahl (8) steuert.Method according to claim 8,
characterized,
in that the material (66) is ejected from a plurality of nozzles (68), and a control unit (26) controls the material ejection from the individual nozzles (68) in dependence on the position of the guided missile (12) to the laser beam (8).
dadurch gekennzeichnet,
dass die Laserstrahlung von einem unter einem Dom (74) des Lenkflugkörpers (12) angeordneten Reflektor reflektiert wird.Method according to one of the preceding claims,
characterized,
that the laser radiation from a under a dome (74) of the guided missile (12) arranged reflector is reflected.
gekennzeichnet,
durch ein Abschattungselement, das den aktiv detektierenden Sensor (42, 44, 46, 48) gegen von vorne auftreffende Laserstrahlung abschattet, wobei das Abschattungselement insbesondere eine Vertiefung (50) im Außengehäuse umfasst, in der der Sensor (42, 44, 46, 48) angeordnet und nach hinten ausgerichtet ist.Guided missile according to claim 11,
in
by a shading element which shadows the actively detecting sensor (42, 44, 46, 48) against laser radiation incident from the front, the shading element in particular comprising a recess (50) in the outer housing, in which the sensor (42, 44, 46, 48 ) is arranged and aligned to the rear.
dadurch gekennzeichnet,
dass ein Sensorsystem (14) zumindest drei über den Umfang des Außengehäuses des Lenkflugkörpers (12) verteilt angeordnete und schräg nach hinten ausgerichtete Sensoren (42, 44, 46, 48) aufweist.Guided missile according to one of claims 11 or 12,
characterized,
that a sensor system (14) arranged at least three distributed over the circumference of the outer casing of the missile (12) and aligned obliquely to the rear sensors (42, 44, 46, 48).
dadurch gekennzeichnet,
dass ein Detektionsraumwinkelbereich des Sensors gegenstandsfrei ist und/oder ein Detektionsraumwinkelbereich eines Sensors (44, 46, 48) der Sensoreinheit auf eine Streufläche (54, 58) gerichtet ist.Guided missile according to one of claims 11 to 13,
characterized,
that a detection range of solid angles of the sensor is subject free, and / or a detection space angle range of a sensor (44, 46, 48) of the sensor unit on a scattering surface (54, 58) is directed.
gekennzeichnet,
durch einen Dom (74) mit einem dahinter angeordneten Raum, der über Öffnungen (76) mit der Umgebung des Lenkflugkörpers (12) zu einem Druckausgleich verbunden ist.Guided missile according to one of claims 11 to 14,
in
by a dome (74) with a space behind it, which is connected via openings (76) with the environment of the missile (12) to a pressure equalization.
gekennzeichnet,
durch einen Wirkteil (30) mit einer Detonationsladung und Splittermaterial, die so zueinander angeordnet sind, dass das Splittermaterial bei einer Detonation der Detonationsladung in einem Kegel nach vorne geschleudert wird.Guided missile according to one of claims 11 to 15,
in
by an active part (30) with a detonation charge and splinter material which are arranged relative to one another such that the splinter material is thrown forward in a cone when the detonation charge detonates.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102015009358.4A DE102015009358A1 (en) | 2015-07-17 | 2015-07-17 | Method of protecting a vehicle from attack by a laser beam |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3118565A1 true EP3118565A1 (en) | 2017-01-18 |
| EP3118565B1 EP3118565B1 (en) | 2018-09-19 |
Family
ID=56411365
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP16001538.4A Active EP3118565B1 (en) | 2015-07-17 | 2016-07-12 | Method for protecting a vehicle against an attack by a laser beam |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP3118565B1 (en) |
| DE (1) | DE102015009358A1 (en) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4471683A (en) * | 1982-08-26 | 1984-09-18 | The United States Of America As Represented By The Secretary Of The Air Force | Voice command weapons launching system |
| WO2002014777A1 (en) * | 2000-08-17 | 2002-02-21 | Saabtech Electronics Ab | Method for confusing and possibly damaging a laser device, and a defence system |
| EP2752681A1 (en) * | 2013-01-07 | 2014-07-09 | The Boeing Company | Laser detection and warning system |
| EP2816310A2 (en) * | 2013-06-21 | 2014-12-24 | Rosemount Aerospace Inc. | Laser-aided passive seeker |
| US20150060652A1 (en) * | 2013-08-30 | 2015-03-05 | Torrey Pines Logic, Inc. | Passive, wide-spectral-band laser threat sensor |
-
2015
- 2015-07-17 DE DE102015009358.4A patent/DE102015009358A1/en not_active Withdrawn
-
2016
- 2016-07-12 EP EP16001538.4A patent/EP3118565B1/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4471683A (en) * | 1982-08-26 | 1984-09-18 | The United States Of America As Represented By The Secretary Of The Air Force | Voice command weapons launching system |
| WO2002014777A1 (en) * | 2000-08-17 | 2002-02-21 | Saabtech Electronics Ab | Method for confusing and possibly damaging a laser device, and a defence system |
| EP2752681A1 (en) * | 2013-01-07 | 2014-07-09 | The Boeing Company | Laser detection and warning system |
| EP2816310A2 (en) * | 2013-06-21 | 2014-12-24 | Rosemount Aerospace Inc. | Laser-aided passive seeker |
| US20150060652A1 (en) * | 2013-08-30 | 2015-03-05 | Torrey Pines Logic, Inc. | Passive, wide-spectral-band laser threat sensor |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3118565B1 (en) | 2018-09-19 |
| DE102015009358A1 (en) | 2017-01-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE4444635C2 (en) | Self-defense device against missiles | |
| EP0665445B1 (en) | Apparatus for defence against an attacking missile | |
| DE10117007A1 (en) | Method and device for protecting mobile military equipment | |
| EP2597415B1 (en) | Method and device for tracking a moving target object | |
| EP1845332B1 (en) | Protective device and protective measure for a radar installation | |
| DE4402855C2 (en) | Defense device for an attacking target airborne missile | |
| EP3118564B1 (en) | Method for protecting a vehicle against an attack by a laser beam | |
| DE10230939A1 (en) | Fighting vehicle has warning sensors to detect and analyze threats and select optimum countermeasures using bus connected detachable munition projectors | |
| WO2018086919A1 (en) | Method and defence system for combating threats | |
| EP2482025B1 (en) | Method and device for defending against an attacking missile | |
| EP3118567B1 (en) | Method for protecting a vehicle against an attack by a laser beam | |
| DE102015015938A1 (en) | Autonomous, unmanned aerial vehicles to escort, escort and secure lulled vehicles such as fixed wing and rotorcraft | |
| EP3118565B1 (en) | Method for protecting a vehicle against an attack by a laser beam | |
| EP3118563B1 (en) | Method for protecting a vehicle against an attack by a laser beam | |
| DE2522927C2 (en) | SYSTEM FOR REPLACEMENT, DISTRACTION AND DESTRUCTION OF ARMS | |
| EP3118566B1 (en) | Method for protecting a vehicle against an attack by a laser beam | |
| EP3376154B1 (en) | Method for protecting a cruise missile | |
| DE102020103249B4 (en) | Method for protecting a helicopter with smoke and helicopter with smoke protection system | |
| DE60023007T2 (en) | SHUTTLE STEERING BY MEANS OF RING ARRANGEMENT AND OPTICALLY LIFTED DEFLECTION DEVICES | |
| DE102019109360A1 (en) | Invention system for defense against RAM targets and / or UAVs as well as methods for defense against RAM targets and / or UAVs | |
| DE19605337C2 (en) | Process for changing the infrared signature of an aircraft | |
| EP3622242A1 (en) | Protection system for protecting against light flying objects such as drones | |
| DE2815206C2 (en) | Procedure, guided missile and weapon system for combating ground targets | |
| EP3943874A1 (en) | Effector for combating a target | |
| DE3736106B3 (en) | Anti-missile interception disc for defence of armoured fighting vehicles incorporates rotating primary and secondary coils |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: DIEHL DEFENCE GMBH & CO. KG |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20170508 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: F41G 7/26 20060101ALI20180308BHEP Ipc: F42B 15/01 20060101ALI20180308BHEP Ipc: F41H 11/00 20060101AFI20180308BHEP Ipc: F41H 13/00 20060101ALI20180308BHEP |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20180413 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| RIN1 | Information on inventor provided before grant (corrected) |
Inventor name: GROSS, MICHAEL Inventor name: KUENZNER, NICOLAI Inventor name: STELTE, NORBERT Inventor name: NOLTE, ARNE Inventor name: MASUR, MICHAEL Inventor name: KUHN, THOMAS |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1043752 Country of ref document: AT Kind code of ref document: T Effective date: 20181015 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502016001975 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20180919 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180919 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181219 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181219 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180919 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181220 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180919 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180919 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180919 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180919 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180919 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180919 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180919 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180919 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180919 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180919 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190119 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180919 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180919 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180919 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190119 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180919 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502016001975 Country of ref document: DE |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180919 |
|
| 26N | No opposition filed |
Effective date: 20190620 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180919 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180919 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180919 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20190731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190731 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190731 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190731 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190712 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190712 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180919 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180919 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20160712 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180919 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 1043752 Country of ref document: AT Kind code of ref document: T Effective date: 20210712 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210712 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20230721 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20230726 Year of fee payment: 8 Ref country code: DE Payment date: 20230907 Year of fee payment: 8 |