EP2713002A1 - Rock drilling rig and method of positioning rock drilling unit - Google Patents
Rock drilling rig and method of positioning rock drilling unit Download PDFInfo
- Publication number
- EP2713002A1 EP2713002A1 EP12186768.3A EP12186768A EP2713002A1 EP 2713002 A1 EP2713002 A1 EP 2713002A1 EP 12186768 A EP12186768 A EP 12186768A EP 2713002 A1 EP2713002 A1 EP 2713002A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- rock drilling
- detection device
- drilling rig
- unit
- reference line
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000005553 drilling Methods 0.000 title claims abstract description 143
- 239000011435 rock Substances 0.000 title claims abstract description 101
- 238000000034 method Methods 0.000 title claims abstract description 18
- 238000001514 detection method Methods 0.000 claims abstract description 123
- 230000005484 gravity Effects 0.000 claims abstract description 23
- 238000013016 damping Methods 0.000 claims description 21
- 238000005422 blasting Methods 0.000 description 6
- 238000004140 cleaning Methods 0.000 description 5
- 239000012530 fluid Substances 0.000 description 5
- 230000003014 reinforcing effect Effects 0.000 description 5
- 238000004519 manufacturing process Methods 0.000 description 3
- 238000011010 flushing procedure Methods 0.000 description 2
- 239000012535 impurity Substances 0.000 description 2
- 230000002787 reinforcement Effects 0.000 description 2
- 238000002604 ultrasonography Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 239000004575 stone Substances 0.000 description 1
- 238000005406 washing Methods 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images



Classifications
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B7/00—Special methods or apparatus for drilling
- E21B7/02—Drilling rigs characterised by means for land transport with their own drive, e.g. skid mounting or wheel mounting
- E21B7/022—Control of the drilling operation; Hydraulic or pneumatic means for activation or operation
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B7/00—Special methods or apparatus for drilling
- E21B7/02—Drilling rigs characterised by means for land transport with their own drive, e.g. skid mounting or wheel mounting
- E21B7/025—Rock drills, i.e. jumbo drills
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21C—MINING OR QUARRYING
- E21C35/00—Details of, or accessories for, machines for slitting or completely freeing the mineral from the seam, not provided for in groups E21C25/00 - E21C33/00, E21C37/00 or E21C39/00
- E21C35/24—Remote control specially adapted for machines for slitting or completely freeing the mineral
Definitions
- the invention relates to a rock drilling rig, and particularly to an arrangement of determining a position of the rock drilling rig at a work site and positioning a rock drilling unit.
- rock drilling rigs are used.
- a rock drilling rig is provided with a boom and a rock drilling unit attached to the boom for drilling drill holes into rock surface.
- the rock drilling rig is positioned in drilling positions where the drilling is executed according to a drilling plan.
- Drill hole fans including several drill holes in a fan shaped pattern may be drilled when there is a need to reinforce tunnel ceilings and walls and when forming blasting holes for production needs.
- the worksite may comprise several planned drill hole fans at a distance from each other. Positioning the rock drilling rig to a new drilling position requires complex measuring and positioning systems, which is a disadvantage.
- An object of the invention is to provide a novel and improved rock drilling rig and a method of positioning a rock drilling unit.
- the rock drilling rig according to the invention is characterized in that the detection device is aligned in the direction of gravity for detecting a position of at least one reference line at a worksite of the rock drilling rig.
- the method according to the invention is characterized by aligning the detection device in the direction of gravity and producing a detection pattern in the detection device; positioning the rock drilling rig to a new position where the detection pattern is aimed in the direction of the reference line; determining a current direction and horizontal distance of the rock drilling unit relative to the reference line; and positioning the rock drilling unit to the new drill hole line to be drilled according to an input horizontal reference distance and the detected direction of the reference line.
- An idea of the disclosed solution is that when positioning a rock drilling rig at a worksite for drilling a drilling pattern, a detection device arranged in the rock drilling rig is used.
- the detection device is aligned in the direction of gravity at least during the positioning procedure.
- the worksite is provided with a reference line and the positioning to a new drilling position is executed according to the reference line, which is detected by means of the detection device.
- the current direction and horizontal distance of a rock drilling unit relative to the reference line is determined. This step is called navigation.
- the drilling unit of the rock drilling rig is positioned to the new drill hole line to be drilled according to an input horizontal reference distance and the detected direction of the reference line. Owner of the mine may define the reference distance between successive drill hole fans or other drilling patterns. This type of drilling process may be called reference drilling.
- An advantage of the disclosed solution is that the positioning does not require complicated measuring devices and calculations for determining the position and direction of the reference line. No measuring means external to the rock drilling rig are required. Since the detection device is in the direction of gravity, there is no need to measure the vertical distance and inclination between the reference line and the detection device. This simplifies the detection and navigation process. An additional advantage is that the work of an operator becomes easier and less demanding.
- the reference line is formed of realized drill holes, i.e. the reference line passes through the pre-drilled drill holes.
- the reference line is formed of at least two realized drill holes.
- the realized holes produce a vertical reference plane, which is detected by the detection device that is in the direction of the gravity.
- a previous realized drill hole fan serves as a reference line for the next drill hole fan to be drilled.
- the fan may be a reinforcing or bolting fan that comprises several drill holes positioned upwards and on the sides in a tunnel or corresponding rock cavern.
- the fan may be a blasting hole fan comprising drill holes pointing perpendicularly upwards and drill holes pointing angularly upwards.
- the reference line is formed of reference markings made to the worksite, i.e. the reference line passes through the reference markings.
- the reference markings may be markings that have been painted on rock surfaces.
- the reference markings may be electronic devices such as transmitters, RFID -tags or beacons.
- the reference markings may be devices comprising a reflector or a light source.
- the detection device produces a fan-shaped detection pattern, the fan-shaped detection pattern pointing upwards and sidewards relative to the rock drilling rig.
- the detection pattern may have a shape of a circle.
- the detection pattern may have a shape of a sector of a circle. In some situations it may be sufficient that an angle of the sector is 90° and that only one sector is produced.
- the fan-shaped detection pattern is a turning beam pattern.
- the beam pattern can be generated by means of a rotating or turning emitter sending a detection beam in a vertical plane. Because the beam is turning or rotating, it is sufficient that only one beam is emitted. However, it is possible to use several beams too.
- the fan-shaped detection pattern is formed of at least two narrow beams having the shape of a fan.
- Two beam emitters are arranged in an angular position relative to each other, and together they produce one uniform fan-shaped pattern that extends upwards and sidewards. Interference of the two fan-shaped beams can be prevented by means of one or more blanking plates.
- the fan-shaped detection pattern comprises at least three beams.
- One beam may be directed upwards and two or more beams may be directed sidewards, or obliquely upwards, whereby they are at an angle relative to the beam pointing upwards.
- the beams may be narrow and point-like so as to produce illuminated points on a rock surface.
- the detection device is a laser emitting device.
- the laser emitting device may comprise one single laser beam arranged to be turned or rotated, or two, three or more laser beams may be arranged to form a fan shaped pattern, as discussed above.
- the beam of the laser may have a form of a narrow fan producing an illuminated line on a rock surface, or the beam may be narrow and point-like so that it produces a small illuminated point on a rock surface.
- the detection device is a camera.
- the camera may be a video camera or a still camera.
- Image data produced by the camera can be processed in an image processor in order to detect positions of pre-drilled holes, reinforcing bolts and reference markings on the observed rock surface.
- the image processor may include an image recognition system. At its simplest, the image data may be shown on a display unit for an operator, whereby the operator may use the display image as a sighting tool.
- the detection device is an ultrasound emitting device.
- the ultrasound emitting device can detect such physical discontinuities on the rock surface.
- the ultrasonic means can be also used for determining the position of the reference line.
- the detection device is located at a predetermined horizontal distance from the rock drilling unit.
- the predetermined distance is set according to a drilling plan and corresponds to a designed horizontal distance between successive drill hole fans to be drilled.
- the distance between the successive fans, i.e. the reference distance can be defined by the owner of the mine.
- the detection device may be located at a predetermined horizontal distance from a zero point of a coordinate system of the rock drilling rig.
- a control unit may execute needed calculations for determining the positions.
- the position of the detection device is arranged to be adjustable in a horizontal direction relative to the drilling unit. This embodiment allows the position of the detection device to be adjusted in case the reference distance changes significantly.
- the detection device may comprise position adjusting means that include a slide and bars for supporting the slide, for example.
- the detection device is arranged to the boom. It is easy and fast to move the detection device to a correct position and direction so that the detection pattern in accordance with the reference line is obtained. In this embodiment there is no need to direct the carrier of the rock drilling rig according to the direction of the reference line, which speeds up the positioning drive of the carrier.
- the detection device is arranged in the carrier. This embodiment may be useful when the reference distance is long. Further, the carrier may be provided with free space for the detection device and the detection device can be easily positioned to a secure place.
- the detection device is aligned in the direction of gravity only when the position of the reference line is determined. Rest of the time the detecting device may be positioned in a transport position under a protective cover, for example.
- the detection device is continuously aligned in the direction of gravity.
- the detection device produces or receives detection signals only when the position of the reference line is determined. Rest of the time the detection device may be switched off.
- the detection device produces or receives detection signals continuously.
- the detection device comprises a pendulum, which is arranged to turn about a horizontal turning axis.
- the detection device is provided with at least one detection unit, which is arranged to the pendulum.
- the pendulum tries to keep its position in the direction of gravity since the center of mass of the pendulum is arranged to be below the turning axis.
- the detection device comprises a pendulum, which is arranged to turn about a horizontal turning axis and aims to keep its position in the direction of gravity.
- the turning motion of the pendulum is dampened by means of one or more damping devices. Because of the damping means the movement of the pendulum and the detection unit arranged in the pendulum can be more stable.
- the damping device comprises a basin, damping fluid in the basin, and one or more damping surfaces immersed in the damping fluid.
- the basin is located under the pendulum and the damping surface is arranged to move together with the pendulum.
- the damping fluid may be oil, for example.
- the damping fluid in the basin has viscosity whereby the fluid dampens the movement of the damping surface and the pendulum.
- the detection device comprises one or more sensors or measuring means for determining the current direction of the detecting device and detecting the direction of the gravity. Further, the detecting device comprises one or more turning devices for positioning the detecting device in the direction of gravity on the basis of received measuring data.
- the direction of the detection device may be controlled either continuously or only when the reference line needs to be detected.
- the detection device may be provided with a control device for the position control. In this embodiment the direction of the detection device is actively controlled.
- the detection device comprises at least one transparent cover arranged on the upper side of the detection device.
- the shielding cover provides overhead protection for the detection device against dropping stone material, moisture and impurities.
- the cover improves durability and reliability of the device.
- the detection device comprises at least one overhead cover and at least one cleaning device for keeping the cover free of impurities.
- the cleaning device may comprise one or more flushing nozzles whereby the cover may be cleaned by means of water jets, for example.
- the cleaning device may comprise one or more wiper blades or corresponding mechanical cleaning means.
- a position of the rock drilling unit relative to the detection device is determined.
- the boom is provided with boom measuring means for measuring positions of boom parts, and the carriage is provided with inclination measuring means for measuring an inclination of the carrier.
- the control unit determines the position of the rock drilling unit relative to the detection device on the basis of measuring data received from the measuring means.
- the drilling unit is then navigated relative to the detected reference line on the basis of the measuring data and known location of the detection device in the rock drilling rig.
- the rock drilling rig is provided with at least one display unit, and the control unit is configured to display on the display unit a current horizontal position of the rock drilling unit relative to the detected reference line. This feature facilitates positioning the drilling unit to a predetermined horizontal distance from the reference line.
- the rock drilling rig is provided with at least one display unit.
- the control unit is able to display on the display unit the current position of the rock drilling unit relative to start points of the holes to be drilled.
- the distance between the start points is predetermined by a mine owner. This feature facilitates and speeds up the positioning of the drilling unit at the defined locations in a drilling fan or other type of drilling pattern.
- control unit is arranged to instruct the operator positioning the drilling unit at a predetermined horizontal distance from the reference line. Further, the control unit may instruct the operator positioning the drilling unit at suitable start points in a drill fan. The distance to a start point of a hole to be drilled next can be indicated to the operator, for instance. Instructions, such as measuring data and various sighting patterns can be shown on a display unit, for example.
- the positioning process comprises a rough-positioning, wherein the carrier is moved so that the detection pattern of the detection device is at the reference line. Thereafter a fine-positioning may be executed so that the detection pattern is arranged in the direction of the reference line.
- a fine-positioning may be executed so that the detection pattern is arranged in the direction of the reference line.
- the detection device is arranged to the boom, it is relatively easy to turn the boom so that the detection pattern coincides with the reference line.
- the horizontal position may be fine adjusted.
- navigation is executed. In the navigation, positions of boom parts of the boom are measured by means of boom measuring means, and inclination of the carrier is measured by means of inclination measuring means.
- Navigation further comprises calculating in a control unit of the rock drilling rig the position of the rock drilling unit relative to the reference line on the basis of measuring data received from the measuring means and the predetermined position of the detecting device attached to the boom.
- the determined current position of the rock drilling unit in relation to the reference line can be indicated on a display unit to an operator.
- the disclosed detection device and the disclosed positioning process may be utilized also when there is a need to finish a drill hole pattern, such as a fan that is partly drilled and includes pre-drilled holes and undrilled holes.
- the position of the last pre-drilled hole in an unfinished drill hole line is assigned by positioning the drilling unit to the last realized drill hole in the unfinished drill hole line. Thereafter navigation is executed and the control system may instruct the operator to drill the next drill hole to be drilled in the unfinished drill hole line. Alternatively, the control unit may take care of the drilling of the unfinished drill holes automatically.
- the rock drilling rig is positioned to a new drilling position so that the drilling unit may be utilized for drilling two or more successive drill hole fans or other patterns at a horizontal reference distance from another. This may reduce the need for positioning drive of the carrier.
- the horizontal reference distance has to be relatively short.
- the rock drilling rig is a bolting device provided with a bolting unit that comprises a drilling unit for drilling drill holes in a fan-shaped pattern. Further, the bolting device comprises a bolting unit for arranging reinforcing bolts into the drilled holes.
- the rock drilling rig is a production drilling rig that is designed for drilling blasting holes into the rock.
- Such a device is provided with a drilling unit for drilling drill holes upwards according to a blasting-technical pattern.
- Figure 1 shows two successive drill hole fans 1 drilled at a predetermined horizontal reference distance RD from each other.
- the reference distance RD is normally defined by an owner of a mine.
- the drill hole fans 1 comprise several drill holes 2, which may be located on walls and a ceiling of a rock cavern. The direction of the drill holes 2 is crosswise to a tunnel line.
- Blasting a round may damage the rock defining the tunnel contour, or the firmness of the rock may be insufficient by nature in order to guarantee a safe tunnel.
- the rock may be reinforced by drilling several adjacent reinforcement holes to which a rock bolt or similar reinforcement members may be fitted.
- drilling may be executed for generating blasting holes when rock is excavated for production purposes.
- the blasting holes can be drilled in a fan-shape too.
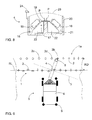
- Figure 2 shows in a simplified manner that at least two realized drill holes 2 or artificial reference markings are needed in order to determine a reference line and a vertical reference plane.
- the realized drill holes are detected by detection patterns 3 produced by a detection device 4.
- the detection device 4 is arranged to be in the direction of gravity G at least during the detection process.
- the detected realized drill holes 2 and the direction of gravity G determine the reference line, which is used for determining the position of a drilling unit of the rock drilling rig at a new drilling location at a distance from the reference line.
- FIG 3 shows a rock drilling rig 5 positioned into a tunnel or a similar rock cavern.
- the rock drilling rig 5 comprises a movable carrier 6 provided with at least one drilling boom 7 which has a rock drilling unit 8 at its outermost end.
- the drilling unit 8 comprises a feed beam and a rock drilling machine supported by the feed beam.
- the boom 7 may comprise several boom parts 7a, 7b.
- the boom 7 comprises several joints 9 and the length of the boom can be changed.
- the boom 7 is provided with measuring means 10 such as sensors or measuring devices. Any other measuring principle and device may be used to determine the positions of the boom 7.
- inclination of the carrier 6 can be detected by an inclination measuring device 11, such as an inclinometer.
- the position and direction of the drilling unit 8 can be determined in one or more control units 12 on the basis of measuring data received from the boom measuring means 10 and the inclination measuring device 11.
- the control unit 12 may display the positioning data and other information for an operator 13 on a display device 14.
- successive drill hole fans 1 are drilled and, between the fans, a horizontal reference distance RD is utilized.
- a previous realized fan is detected by a detection device 4 situated on the boom 7.
- a detection pattern or beam coincides with drill holes 4 of the previous fan 1, the rock drilling rig being navigated on the basis of this information.
- the detection device 4a may be situated on the carrier 6.
- the detection device 4 may be construed so that the detection pattern is automatically aimed upwards in the direction of gravity.
- the direction of the detection device 4a may be controlled actively, which requires position measuring and a suitable actuator for moving the detection device in the direction of gravity.
- Drill holes 2 may be drilled in the direction of gravity or they may be directed at a desired angle relative to gravity. The latter situation is shown by a broken line 2a.
- reference markings 15 may be made on a rock surface and to use them when determining the reference line. Such reference markings 15 may be used for defining a first reference position, for example.
- a detection device 4 is positioned so that a detection pattern is at a reference line RL defined by starting points of drill holes of a previous drill hole fan.
- Figure 5 illustrates that the direction of a carrier 6 may deviate from the direction of the reference line RL since the detection device 4 is attached to a boom 7.
- the detection pattern can be directed simply by turning the boom 7 and the moving boom parts.
- a rig 5 is rough-positioned near a reference line by moving a carrier 6.
- a detection pattern 3 and a reference line RL do not coincide, wherefore a more accurate positioning is needed.
- the carrier 6 has been lifted on support legs S and the carrier is no longer moved, thus fine-positioning is executed by moving the boom 7 only.
- a detection device 4 produces two narrow fan-shaped detection patterns 3.
- Such a fan-shaped detection pattern forms an illuminated line when it hits a rock surface. It is easy to compare the directions of the produced detection line and a line of realized drill holes or a line of reference markings.
- FIG 8 shows a detection device 4 in which emitters or detection units 16 are arranged in a pendulum 17 and movement of the pendulum 17 is dampened by a damping device 18.
- the pendulum 17 is arranged to turn about a horizontal turning axis 19.
- the pendulum 17 tries to keep its position in the direction of gravity since the center of mass of the pendulum is arranged to be below the turning axis 19.
- the turning motion of the pendulum 17 may be dampened by means of the damping device 18, which may comprises a basin 20, damping oil 21 in the basin 20, and damping surfaces 22 immersed in the damping oil 21.
- the basin 20 is located under the pendulum 17 and when the pendulum 17 turns relative to the turning axis 19 the damping surfaces 22 move inside the basin 20.
- the damping oil 21 dampens the movement of the damping surfaces 22 and the pendulum 17.
- the detection device may comprise a transparent cover 23 arranged on the upper side of the detecting device 4.
- the cover 23 may be kept clean by means of a cleaning device 24, which may comprise a flushing nozzle, for example. Further, it may be possible to arrange several transparent protecting films on the cover 23. Then, instead of washing the cover 23, the protecting films may simply be removed one by one when dirt accumulates on the cover.
- Figure 9 illustrates positioning of a drilling unit 8 to an unfinished drilling fan 1 a.
- the above-disclosed detection and positioning processes may be utilized also in this case.
- Such an unfinished fan 1a includes pre-drilled holes 2 and undrilled holes 2c.
- the position and direction of a previous fan 1 are detected.
- the position and direction of the unfinished fan 1a are determined.
- the position of a last predrilled hole 2b in the unfinished drill hole fan 1 a is assigned by positioning the drilling unit 8 to the last realized hole 2b. Thereafter navigation is executed and the drilling unit 8 can be positioned at a start point of the next undrilled drill hole 2d.
Landscapes
- Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Geochemistry & Mineralogy (AREA)
- Physics & Mathematics (AREA)
- Environmental & Geological Engineering (AREA)
- Fluid Mechanics (AREA)
- Mechanical Engineering (AREA)
- Earth Drilling (AREA)
Abstract
Description
- The invention relates to a rock drilling rig, and particularly to an arrangement of determining a position of the rock drilling rig at a work site and positioning a rock drilling unit.
- The field of the invention is defined more specifically in the preambles of the independent claims.
- In mines and at other worksites, rock drilling rigs are used. A rock drilling rig is provided with a boom and a rock drilling unit attached to the boom for drilling drill holes into rock surface. The rock drilling rig is positioned in drilling positions where the drilling is executed according to a drilling plan. Drill hole fans including several drill holes in a fan shaped pattern may be drilled when there is a need to reinforce tunnel ceilings and walls and when forming blasting holes for production needs. The worksite may comprise several planned drill hole fans at a distance from each other. Positioning the rock drilling rig to a new drilling position requires complex measuring and positioning systems, which is a disadvantage.
- An object of the invention is to provide a novel and improved rock drilling rig and a method of positioning a rock drilling unit.
- The rock drilling rig according to the invention is characterized in that the detection device is aligned in the direction of gravity for detecting a position of at least one reference line at a worksite of the rock drilling rig.
- The method according to the invention is characterized by aligning the detection device in the direction of gravity and producing a detection pattern in the detection device; positioning the rock drilling rig to a new position where the detection pattern is aimed in the direction of the reference line; determining a current direction and horizontal distance of the rock drilling unit relative to the reference line; and positioning the rock drilling unit to the new drill hole line to be drilled according to an input horizontal reference distance and the detected direction of the reference line.
- An idea of the disclosed solution is that when positioning a rock drilling rig at a worksite for drilling a drilling pattern, a detection device arranged in the rock drilling rig is used. The detection device is aligned in the direction of gravity at least during the positioning procedure. The worksite is provided with a reference line and the positioning to a new drilling position is executed according to the reference line, which is detected by means of the detection device. After the reference line is detected, the current direction and horizontal distance of a rock drilling unit relative to the reference line is determined. This step is called navigation. The drilling unit of the rock drilling rig is positioned to the new drill hole line to be drilled according to an input horizontal reference distance and the detected direction of the reference line. Owner of the mine may define the reference distance between successive drill hole fans or other drilling patterns. This type of drilling process may be called reference drilling.
- An advantage of the disclosed solution is that the positioning does not require complicated measuring devices and calculations for determining the position and direction of the reference line. No measuring means external to the rock drilling rig are required. Since the detection device is in the direction of gravity, there is no need to measure the vertical distance and inclination between the reference line and the detection device. This simplifies the detection and navigation process. An additional advantage is that the work of an operator becomes easier and less demanding.
- According to an embodiment, the reference line is formed of realized drill holes, i.e. the reference line passes through the pre-drilled drill holes. An advantage of this solution is that there is no need to make any reference markings to a worksite in a separate step, which allows extra marking work to be avoided and may speed up the process.
- According to an embodiment, the reference line is formed of at least two realized drill holes. The realized holes produce a vertical reference plane, which is detected by the detection device that is in the direction of the gravity.
- According to an embodiment, a previous realized drill hole fan serves as a reference line for the next drill hole fan to be drilled. The fan may be a reinforcing or bolting fan that comprises several drill holes positioned upwards and on the sides in a tunnel or corresponding rock cavern. Alternatively, the fan may be a blasting hole fan comprising drill holes pointing perpendicularly upwards and drill holes pointing angularly upwards.
- According to an embodiment, the reference line is formed of reference markings made to the worksite, i.e. the reference line passes through the reference markings. The reference markings may be markings that have been painted on rock surfaces. Alternatively, the reference markings may be electronic devices such as transmitters, RFID -tags or beacons. Further, the reference markings may be devices comprising a reflector or a light source. By means of the reference markings a first reference position can be determined or reference markings can be done in critical positions of the mine, for example.
- According to an embodiment, the detection device produces a fan-shaped detection pattern, the fan-shaped detection pattern pointing upwards and sidewards relative to the rock drilling rig. The detection pattern may have a shape of a circle. Alternatively, the detection pattern may have a shape of a sector of a circle. In some situations it may be sufficient that an angle of the sector is 90° and that only one sector is produced.
- According to an embodiment, the fan-shaped detection pattern is a turning beam pattern. The beam pattern can be generated by means of a rotating or turning emitter sending a detection beam in a vertical plane. Because the beam is turning or rotating, it is sufficient that only one beam is emitted. However, it is possible to use several beams too.
- According to an embodiment, the fan-shaped detection pattern is formed of at least two narrow beams having the shape of a fan. Two beam emitters are arranged in an angular position relative to each other, and together they produce one uniform fan-shaped pattern that extends upwards and sidewards. Interference of the two fan-shaped beams can be prevented by means of one or more blanking plates.
- According to an embodiment, the fan-shaped detection pattern comprises at least three beams. One beam may be directed upwards and two or more beams may be directed sidewards, or obliquely upwards, whereby they are at an angle relative to the beam pointing upwards. The beams may be narrow and point-like so as to produce illuminated points on a rock surface.
- According to an embodiment, the detection device is a laser emitting device. The laser emitting device may comprise one single laser beam arranged to be turned or rotated, or two, three or more laser beams may be arranged to form a fan shaped pattern, as discussed above. Further, the beam of the laser may have a form of a narrow fan producing an illuminated line on a rock surface, or the beam may be narrow and point-like so that it produces a small illuminated point on a rock surface.
- According to an embodiment, the detection device is a camera. By means of one or more cameras, pre-drilled holes, reinforcing bolts and reference markings can be detected. The camera may be a video camera or a still camera. Image data produced by the camera can be processed in an image processor in order to detect positions of pre-drilled holes, reinforcing bolts and reference markings on the observed rock surface. The image processor may include an image recognition system. At its simplest, the image data may be shown on a display unit for an operator, whereby the operator may use the display image as a sighting tool.
- According to an embodiment, the detection device is an ultrasound emitting device. By using ultrasonic waves it is possible to detect drilled holes in the rock surface, reinforcing bolts or artificial physical reference markings. The ultrasound emitting device can detect such physical discontinuities on the rock surface. Thus, the ultrasonic means can be also used for determining the position of the reference line.
- According to an embodiment, the detection device is located at a predetermined horizontal distance from the rock drilling unit. The predetermined distance is set according to a drilling plan and corresponds to a designed horizontal distance between successive drill hole fans to be drilled. The distance between the successive fans, i.e. the reference distance can be defined by the owner of the mine. Alternatively, the detection device may be located at a predetermined horizontal distance from a zero point of a coordinate system of the rock drilling rig. A control unit may execute needed calculations for determining the positions.
- According to an embodiment, the position of the detection device is arranged to be adjustable in a horizontal direction relative to the drilling unit. This embodiment allows the position of the detection device to be adjusted in case the reference distance changes significantly. The detection device may comprise position adjusting means that include a slide and bars for supporting the slide, for example.
- According to an embodiment, the detection device is arranged to the boom. It is easy and fast to move the detection device to a correct position and direction so that the detection pattern in accordance with the reference line is obtained. In this embodiment there is no need to direct the carrier of the rock drilling rig according to the direction of the reference line, which speeds up the positioning drive of the carrier.
- According to an embodiment, the detection device is arranged in the carrier. This embodiment may be useful when the reference distance is long. Further, the carrier may be provided with free space for the detection device and the detection device can be easily positioned to a secure place.
- According to an embodiment, the detection device is aligned in the direction of gravity only when the position of the reference line is determined. Rest of the time the detecting device may be positioned in a transport position under a protective cover, for example.
- According to an embodiment, the detection device is continuously aligned in the direction of gravity.
- According to an embodiment, the detection device produces or receives detection signals only when the position of the reference line is determined. Rest of the time the detection device may be switched off.
- According to an embodiment, the detection device produces or receives detection signals continuously.
- According to an embodiment, the detection device comprises a pendulum, which is arranged to turn about a horizontal turning axis. The detection device is provided with at least one detection unit, which is arranged to the pendulum. The pendulum tries to keep its position in the direction of gravity since the center of mass of the pendulum is arranged to be below the turning axis.
- According to an embodiment, the detection device comprises a pendulum, which is arranged to turn about a horizontal turning axis and aims to keep its position in the direction of gravity. The turning motion of the pendulum is dampened by means of one or more damping devices. Because of the damping means the movement of the pendulum and the detection unit arranged in the pendulum can be more stable.
- According to an embodiment, the damping device comprises a basin, damping fluid in the basin, and one or more damping surfaces immersed in the damping fluid. The basin is located under the pendulum and the damping surface is arranged to move together with the pendulum. The damping fluid may be oil, for example. When the pendulum turns relative to the turning axis the damping surface moves inside the basin. The damping fluid in the basin has viscosity whereby the fluid dampens the movement of the damping surface and the pendulum. Such a damping device is simple, inexpensive and reliable.
- According to an embodiment, the detection device comprises one or more sensors or measuring means for determining the current direction of the detecting device and detecting the direction of the gravity. Further, the detecting device comprises one or more turning devices for positioning the detecting device in the direction of gravity on the basis of received measuring data. The direction of the detection device may be controlled either continuously or only when the reference line needs to be detected. The detection device may be provided with a control device for the position control. In this embodiment the direction of the detection device is actively controlled.
- According to an embodiment, the detection device comprises at least one transparent cover arranged on the upper side of the detection device. The shielding cover provides overhead protection for the detection device against dropping stone material, moisture and impurities. The cover improves durability and reliability of the device.
- According to an embodiment, the detection device comprises at least one overhead cover and at least one cleaning device for keeping the cover free of impurities. The cleaning device may comprise one or more flushing nozzles whereby the cover may be cleaned by means of water jets, for example. Alternatively or in addition, the cleaning device may comprise one or more wiper blades or corresponding mechanical cleaning means.
- According to an embodiment, a position of the rock drilling unit relative to the detection device is determined. The boom is provided with boom measuring means for measuring positions of boom parts, and the carriage is provided with inclination measuring means for measuring an inclination of the carrier. The control unit determines the position of the rock drilling unit relative to the detection device on the basis of measuring data received from the measuring means. The drilling unit is then navigated relative to the detected reference line on the basis of the measuring data and known location of the detection device in the rock drilling rig.
- According to an embodiment, the rock drilling rig is provided with at least one display unit, and the control unit is configured to display on the display unit a current horizontal position of the rock drilling unit relative to the detected reference line. This feature facilitates positioning the drilling unit to a predetermined horizontal distance from the reference line.
- According to an embodiment, the rock drilling rig is provided with at least one display unit. When the drilling unit is positioned to a new drilling location at a reference distance from the reference line, the control unit is able to display on the display unit the current position of the rock drilling unit relative to start points of the holes to be drilled. Typically the distance between the start points is predetermined by a mine owner. This feature facilitates and speeds up the positioning of the drilling unit at the defined locations in a drilling fan or other type of drilling pattern.
- According to an embodiment, the control unit is arranged to instruct the operator positioning the drilling unit at a predetermined horizontal distance from the reference line. Further, the control unit may instruct the operator positioning the drilling unit at suitable start points in a drill fan. The distance to a start point of a hole to be drilled next can be indicated to the operator, for instance. Instructions, such as measuring data and various sighting patterns can be shown on a display unit, for example.
- According to an embodiment, the positioning process comprises a rough-positioning, wherein the carrier is moved so that the detection pattern of the detection device is at the reference line. Thereafter a fine-positioning may be executed so that the detection pattern is arranged in the direction of the reference line. When the detection device is arranged to the boom, it is relatively easy to turn the boom so that the detection pattern coincides with the reference line. Also the horizontal position may be fine adjusted. When the detection pattern is according to the reference line, navigation is executed. In the navigation, positions of boom parts of the boom are measured by means of boom measuring means, and inclination of the carrier is measured by means of inclination measuring means. Navigation further comprises calculating in a control unit of the rock drilling rig the position of the rock drilling unit relative to the reference line on the basis of measuring data received from the measuring means and the predetermined position of the detecting device attached to the boom. The determined current position of the rock drilling unit in relation to the reference line can be indicated on a display unit to an operator.
- According to an embodiment, the disclosed detection device and the disclosed positioning process may be utilized also when there is a need to finish a drill hole pattern, such as a fan that is partly drilled and includes pre-drilled holes and undrilled holes. The position of the last pre-drilled hole in an unfinished drill hole line is assigned by positioning the drilling unit to the last realized drill hole in the unfinished drill hole line. Thereafter navigation is executed and the control system may instruct the operator to drill the next drill hole to be drilled in the unfinished drill hole line. Alternatively, the control unit may take care of the drilling of the unfinished drill holes automatically.
- According to an embodiment, the rock drilling rig is positioned to a new drilling position so that the drilling unit may be utilized for drilling two or more successive drill hole fans or other patterns at a horizontal reference distance from another. This may reduce the need for positioning drive of the carrier. In this embodiment the horizontal reference distance has to be relatively short.
- According to an embodiment, the rock drilling rig is a bolting device provided with a bolting unit that comprises a drilling unit for drilling drill holes in a fan-shaped pattern. Further, the bolting device comprises a bolting unit for arranging reinforcing bolts into the drilled holes.
- According to an embodiment, the rock drilling rig is a production drilling rig that is designed for drilling blasting holes into the rock. Such a device is provided with a drilling unit for drilling drill holes upwards according to a blasting-technical pattern.
- Above disclosed embodiments may be combined in order to form suitable solutions having those of the above features that are needed.
- Some embodiments are described in more detail in the accompanying drawings, in which
-
Figure 1 shows schematically a perspective view of a tunnel having successive drill hole fans, -
Figure 2 shows schematically a tunnel having two realized drill holes forming a reference line when detected by detection patterns directed in the direction of gravity, -
Figure 3 is a schematic side view showing a rock drilling rig for drilling drill hole fans at a reference distance from each other, -
Figure 4 is a schematic top view illustrating a rock drilling rig positioned at a previous drilled fan serving as a reference line, -
Figure 5 is a schematic top view showing a detection device arranged to a boom so that a carrier may be at an angle relative to a detected reference line, -
Figure 6a shows schematically a rock drilling rig from a side and the top when a carrier is rough-positioned by driving near the reference line, andFigure 6b shows the situation after the carrier has been lifted on support legs and fine-positioning is executed by moving a boom, -
Figure 7 shows schematically a detection device and two narrow fan shaped detection patterns produced, -
Figure 8 is a schematic sectional view of a detection device, wherein emitters are arranged in a pendulum and movement of the pendulum is dampened, and -
Figure 9 is a schematic top view illustrating positioning of a drilling unit to an unfinished drilling pattern. - For the sake of clarity, the figures show some embodiments of the disclosed solution in a simplified manner. In the figures, like reference numerals identify like elements.
-
Figure 1 shows two successivedrill hole fans 1 drilled at a predetermined horizontal reference distance RD from each other. The reference distance RD is normally defined by an owner of a mine. Thedrill hole fans 1 compriseseveral drill holes 2, which may be located on walls and a ceiling of a rock cavern. The direction of the drill holes 2 is crosswise to a tunnel line. - Blasting a round may damage the rock defining the tunnel contour, or the firmness of the rock may be insufficient by nature in order to guarantee a safe tunnel. Thus, there may be a need to reinforce the ceiling and walls of the tunnel. The rock may be reinforced by drilling several adjacent reinforcement holes to which a rock bolt or similar reinforcement members may be fitted.
- Alternatively drilling may be executed for generating blasting holes when rock is excavated for production purposes. The blasting holes can be drilled in a fan-shape too.
-
Figure 2 shows in a simplified manner that at least two realizeddrill holes 2 or artificial reference markings are needed in order to determine a reference line and a vertical reference plane. The realized drill holes are detected bydetection patterns 3 produced by adetection device 4. Thedetection device 4 is arranged to be in the direction of gravity G at least during the detection process. The detected realizeddrill holes 2 and the direction of gravity G determine the reference line, which is used for determining the position of a drilling unit of the rock drilling rig at a new drilling location at a distance from the reference line. -
Figure 3 shows arock drilling rig 5 positioned into a tunnel or a similar rock cavern. Therock drilling rig 5 comprises amovable carrier 6 provided with at least onedrilling boom 7 which has arock drilling unit 8 at its outermost end. Thedrilling unit 8 comprises a feed beam and a rock drilling machine supported by the feed beam. Theboom 7 may compriseseveral boom parts boom 7 comprisesseveral joints 9 and the length of the boom can be changed. Theboom 7 is provided with measuring means 10 such as sensors or measuring devices. Any other measuring principle and device may be used to determine the positions of theboom 7. Furthermore, inclination of thecarrier 6 can be detected by aninclination measuring device 11, such as an inclinometer. The position and direction of thedrilling unit 8 can be determined in one ormore control units 12 on the basis of measuring data received from the boom measuring means 10 and theinclination measuring device 11. Thecontrol unit 12 may display the positioning data and other information for anoperator 13 on adisplay device 14. - As shown in
Figure 3 , successivedrill hole fans 1 are drilled and, between the fans, a horizontal reference distance RD is utilized. In the Figure a previous realized fan is detected by adetection device 4 situated on theboom 7. A detection pattern or beam coincides withdrill holes 4 of theprevious fan 1, the rock drilling rig being navigated on the basis of this information. Alternatively, the detection device 4a may be situated on thecarrier 6. Thedetection device 4 may be construed so that the detection pattern is automatically aimed upwards in the direction of gravity. Alternatively, the direction of the detection device 4a may be controlled actively, which requires position measuring and a suitable actuator for moving the detection device in the direction of gravity. - Drill holes 2 may be drilled in the direction of gravity or they may be directed at a desired angle relative to gravity. The latter situation is shown by a
broken line 2a. - Further, it is possible to make
reference markings 15 on a rock surface and to use them when determining the reference line.Such reference markings 15 may be used for defining a first reference position, for example. - In
Figures 4 and 5 adetection device 4 is positioned so that a detection pattern is at a reference line RL defined by starting points of drill holes of a previous drill hole fan.Figure 5 illustrates that the direction of acarrier 6 may deviate from the direction of the reference line RL since thedetection device 4 is attached to aboom 7. The detection pattern can be directed simply by turning theboom 7 and the moving boom parts. - In
Figure 6a arig 5 is rough-positioned near a reference line by moving acarrier 6. As can be noted, adetection pattern 3 and a reference line RL do not coincide, wherefore a more accurate positioning is needed. InFigure 6b thecarrier 6 has been lifted on support legs S and the carrier is no longer moved, thus fine-positioning is executed by moving theboom 7 only. - In
Figure 7 adetection device 4 produces two narrow fan-shapeddetection patterns 3. Such a fan-shaped detection pattern forms an illuminated line when it hits a rock surface. It is easy to compare the directions of the produced detection line and a line of realized drill holes or a line of reference markings. -
Figure 8 shows adetection device 4 in which emitters ordetection units 16 are arranged in apendulum 17 and movement of thependulum 17 is dampened by a dampingdevice 18. Thependulum 17 is arranged to turn about ahorizontal turning axis 19. Thependulum 17 tries to keep its position in the direction of gravity since the center of mass of the pendulum is arranged to be below the turningaxis 19. The turning motion of thependulum 17 may be dampened by means of the dampingdevice 18, which may comprises abasin 20, dampingoil 21 in thebasin 20, and dampingsurfaces 22 immersed in the dampingoil 21. Thebasin 20 is located under thependulum 17 and when thependulum 17 turns relative to the turningaxis 19 the dampingsurfaces 22 move inside thebasin 20. The dampingoil 21 dampens the movement of the dampingsurfaces 22 and thependulum 17. - Further, the detection device may comprise a
transparent cover 23 arranged on the upper side of the detectingdevice 4. Thecover 23 may be kept clean by means of acleaning device 24, which may comprise a flushing nozzle, for example. Further, it may be possible to arrange several transparent protecting films on thecover 23. Then, instead of washing thecover 23, the protecting films may simply be removed one by one when dirt accumulates on the cover. - It is also possible to arrange blanking plates P to prevent interference between the detection patterns produced by the
detection units 16. -
Figure 9 illustrates positioning of adrilling unit 8 to anunfinished drilling fan 1 a. The above-disclosed detection and positioning processes may be utilized also in this case. Such anunfinished fan 1a includespre-drilled holes 2 andundrilled holes 2c. At first the position and direction of aprevious fan 1 are detected. On the basis of the reference distance RD and a determined reference line RL, the position and direction of theunfinished fan 1a are determined. In a second phase, the position of a lastpredrilled hole 2b in the unfinisheddrill hole fan 1 a is assigned by positioning thedrilling unit 8 to the last realizedhole 2b. Thereafter navigation is executed and thedrilling unit 8 can be positioned at a start point of the nextundrilled drill hole 2d. - The drawings and the related description are only intended to illustrate the idea of the invention. In its details, the invention may vary within the scope of the claims.
Claims (15)
- A rock drilling rig comprising:a movable carrier (6);at least one boom (7);at least one rock drilling unit (8) arranged at a distal portion of the boom (7);at least one detection device (4); andat least one control unit (12);characterized in thatthe detection device (4) is aligned in the direction of gravity (G) for detecting a position of at least one reference line (RL) at a work site of the rock drilling rig (5).
- A rock drilling rig as claimed in claim 1, characterized in that
the detection device (4) has a detection pattern (3) which is fan shaped and points upwards and sidewards relative to the rock drilling rig (5). - A rock drilling rig as claimed in claim 1 or 2, characterized in that
the detection device (4) is a laser emitting device. - A rock drilling rig as claimed in any one of the preceding claims, characterized in that
the detection device (4) is attached to the boom (7). - A rock drilling rig as claimed in any one of the preceding claims, characterized in that
the detection device (4) is located at a predetermined horizontal distance from the rock drilling unit (8); and
the predetermined distance is set according to a drilling plan and corresponds to a designed horizontal distance between successive drill hole fans (1) to be drilled. - A rock drilling rig as claimed in any one of the preceding claims, characterized in that
the detection device (4) comprises a pendulum (17) arranged to turn about a horizontal turning axis (19);
the detection device (4) is provided with at least one detection unit (16) arranged to the pendulum (17); and
center of mass of the pendulum (17) is below the turning axis (19), the pendulum (17) thus setting in the direction of gravity. - A rock drilling rig as claimed in claim 6, characterized in that
the detection device (4) comprises at least one dampening device (18) for damping the turning motion of the pendulum (17). - A rock drilling rig as claimed in any one of the preceding claims, characterized in that
the detection device (4) comprises at least one transparent cover (23) arranged on the upper side of the detection device (4) for overhead protection. - A rock drilling rig as claimed in any one of the preceding claims, characterized in that
the boom (7) is provided with boom measuring means (10) for measuring positions of boom parts (7a, 7b) of the boom (7);
the carrier (6) is provided with inclination measuring means (11) for measuring an inclination of the carrier (6); and
the control unit (12) is configured to determine the position of the rock drilling unit (8) relative to the detection device (4) on the basis of measuring data received from the measuring means (10, 11). - A rock drilling rig as claimed in claim 9, characterized in that
the rock drilling rig (5) is provided with at least one display unit (14); and
the control unit (12) is configured to display on the display unit (14) the current position of the rock drilling unit (8) relative to the reference line (RL). - A rock drilling rig as claimed in any one of the preceding claims, characterized in that
the rock drilling rig (5) is a bolting device provided with a bolting unit; and
the bolting unit comprises a drilling unit (8) for drilling drill holes in a fan-shaped pattern. - Method of positioning a rock drilling rig at a worksite, the method comprising:detecting a reference line (RL) at the worksite by means of at least one detection device (4) arranged to the rock drilling rig (5); andpositioning a drilling unit (8) of the rock drilling rig (5) to a new drill hole line according to the detected reference line (RL);characterized byaligning the detection device (4) in the direction of gravity (G) and producing a detection pattern (3) in the detection device (4);positioning the rock drilling rig (5) to a new position where the detection pattern (3) is aimed in the direction of the reference line (RL);determining a current direction and horizontal distance of the rock drilling unit (8) relative to the reference line (RL); andpositioning the rock drilling unit (8) to the new drill hole line to be drilled according to an input horizontal reference distance (RD) and the detected direction of the reference line (RL).
- A method as claimed in claim 12, characterized by
detecting a realized drill hole line by means of the detection device (4); and
using the detected realized drill hole line as the reference line (RL) for the next at least one next drill hole line to be drilled. - A method as claimed in claim 12 or 13, characterized by
using in the positioning process a detection device (4) arranged to a predetermined position of the boom (7) of the rock drilling rig (5);
moving a carrier (6) of the rock drilling rig (5) to a new drilling position for drilling at least one fan-shaped drill hole line;
rough-positioning the carrier (6) in the new drilling position so that the detection pattern (3) of the detection device is at the reference line (RL);
fine-positioning the detection pattern (3) in the direction of the reference line (RL) by moving the boom (7);
measuring positions of boom parts (7a, 7b) of the boom by means of boom measuring means (10), and measuring an inclination of the carrier (6) by means of inclination measuring means (11);
calculating in a control unit (12) of the rock drilling rig (5) the position of the rock drilling unit (8) relative to the reference line (RL) on the basis of measuring data received from the measuring means (10, 11) and the predetermined position of the detection device (4) in the boom (7); and
indicating in at least one display unit (14) the determined current position of the rock drilling unit (8) in relation to the reference line (RL). - A method as claimed in any one of the preceding claims 12 - 14, characterized by
positioning the rock drilling unit (8) to an unfinished drill hole line (1a) having at least one predrilled drill hole (2, 2b) and at least one undrilled hole (2c, 2d), the unfinished drill hole line (1 a) being at the reference distance (RD) and direction relative to the detected reference line (RL);
positioning the drilling unit (8) at a pre-drilled hole (2b) in the unfinished drill hole line (1a) for assigning the last pre-drilled hole (2b);
positioning the drilling unit (8) in the unfinished drill hole line (1 a) to a start position of an undrilled hole (2d) being at a predetermined distance from the detected last pre-drilled hole (2b); and
finishing off the drilling by drilling several unfinished drill holes (2c).
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP12186768.3A EP2713002B1 (en) | 2012-10-01 | 2012-10-01 | Rock drilling rig and method of positioning rock drilling unit |
| AU2013222034A AU2013222034B2 (en) | 2012-10-01 | 2013-09-02 | Rock drilling rig and method of positioning rock drilling unit |
| ZA2013/06821A ZA201306821B (en) | 2012-10-01 | 2013-09-10 | Rock drilling rig and method of positioning rock drilling unit |
| CA2827180A CA2827180C (en) | 2012-10-01 | 2013-09-17 | Rock drilling rig and method of positioning rock drilling unit |
| JP2013203175A JP5792783B2 (en) | 2012-10-01 | 2013-09-30 | Rock drilling rig and rock drilling unit positioning method |
| CN201310462750.6A CN103711487B (en) | 2012-10-01 | 2013-09-30 | Rock drilling rig and method of positioning rock drilling unit |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP12186768.3A EP2713002B1 (en) | 2012-10-01 | 2012-10-01 | Rock drilling rig and method of positioning rock drilling unit |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2713002A1 true EP2713002A1 (en) | 2014-04-02 |
| EP2713002B1 EP2713002B1 (en) | 2016-10-26 |
Family
ID=47046389
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP12186768.3A Active EP2713002B1 (en) | 2012-10-01 | 2012-10-01 | Rock drilling rig and method of positioning rock drilling unit |
Country Status (6)
| Country | Link |
|---|---|
| EP (1) | EP2713002B1 (en) |
| JP (1) | JP5792783B2 (en) |
| CN (1) | CN103711487B (en) |
| AU (1) | AU2013222034B2 (en) |
| CA (1) | CA2827180C (en) |
| ZA (1) | ZA201306821B (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108487861A (en) * | 2018-04-26 | 2018-09-04 | 中国水利水电第四工程局有限公司 | A kind of multi-arm drill control tilts armature boring construction system and construction method |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105003206B (en) * | 2015-06-30 | 2017-04-26 | 上海中联重科桩工机械有限公司 | Rotary drilling rig, support leg expansion control system of rotary drilling rig and control method |
| CN105587265B (en) * | 2015-12-13 | 2017-11-24 | 山东交通学院 | Tunnel Blasting drilling equipment |
| CN106894807A (en) * | 2017-02-09 | 2017-06-27 | 宁夏百辰工业产品设计有限公司 | The hydraulic rock machine operation fixed point pressure-resistant buffer unit of displacement |
| CN109403946B (en) * | 2018-12-27 | 2022-07-29 | 北京三一智造科技有限公司 | Rotary drilling rig rotation animation display method and device and rotary drilling rig |
| EP3696365B1 (en) * | 2019-02-14 | 2021-12-22 | Sandvik Mining and Construction Oy | Rock drilling arrangement, rock drilling rig and drilling method |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2007000492A1 (en) * | 2005-06-29 | 2007-01-04 | Sandvik Mining And Construction Oy | Arrangement for positioning rock drilling rig on drilling site |
| WO2008129128A1 (en) * | 2007-04-20 | 2008-10-30 | Sandvik Mining And Construction Oy | Method of directing drilling pattern in curved tunnels, rock drilling rig, and software product |
| WO2011104441A1 (en) * | 2010-02-25 | 2011-09-01 | Sandvik Mining And Construction Oy | Rock drilling rig, method for rock drilling, and control system of rock drilling rig |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2847271B2 (en) * | 1992-02-13 | 1999-01-13 | 佐藤工業株式会社 | Hole butt adjustment method and device in tunnel drilling |
| KR100465007B1 (en) * | 2003-12-06 | 2005-01-14 | 강대우 | Boring machine in underwater differential global positioning system and boring method using the same |
| CN2732978Y (en) * | 2004-08-06 | 2005-10-12 | 荣成中磊石材有限公司 | Perpendicular hole locating rock-drilling equipment |
| FI123744B (en) * | 2006-09-06 | 2013-10-15 | Sandvik Mining & Constr Oy | Procedure for drilling mountains |
| FI123647B (en) * | 2007-07-06 | 2013-08-30 | Sandvik Mining & Constr Oy | A rock drilling rig |
| FI122035B (en) * | 2010-02-25 | 2011-07-29 | Sandvik Mining & Constr Oy | Method for Displaying Positioning Information When Drilling a Hole Bucket, User Interface and Rock Drilling Device |
-
2012
- 2012-10-01 EP EP12186768.3A patent/EP2713002B1/en active Active
-
2013
- 2013-09-02 AU AU2013222034A patent/AU2013222034B2/en active Active
- 2013-09-10 ZA ZA2013/06821A patent/ZA201306821B/en unknown
- 2013-09-17 CA CA2827180A patent/CA2827180C/en active Active
- 2013-09-30 JP JP2013203175A patent/JP5792783B2/en active Active
- 2013-09-30 CN CN201310462750.6A patent/CN103711487B/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2007000492A1 (en) * | 2005-06-29 | 2007-01-04 | Sandvik Mining And Construction Oy | Arrangement for positioning rock drilling rig on drilling site |
| WO2008129128A1 (en) * | 2007-04-20 | 2008-10-30 | Sandvik Mining And Construction Oy | Method of directing drilling pattern in curved tunnels, rock drilling rig, and software product |
| WO2011104441A1 (en) * | 2010-02-25 | 2011-09-01 | Sandvik Mining And Construction Oy | Rock drilling rig, method for rock drilling, and control system of rock drilling rig |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108487861A (en) * | 2018-04-26 | 2018-09-04 | 中国水利水电第四工程局有限公司 | A kind of multi-arm drill control tilts armature boring construction system and construction method |
Also Published As
| Publication number | Publication date |
|---|---|
| CN103711487A (en) | 2014-04-09 |
| JP2014070488A (en) | 2014-04-21 |
| AU2013222034A1 (en) | 2014-04-17 |
| AU2013222034B2 (en) | 2015-08-27 |
| EP2713002B1 (en) | 2016-10-26 |
| CA2827180C (en) | 2016-01-12 |
| ZA201306821B (en) | 2015-11-25 |
| JP5792783B2 (en) | 2015-10-14 |
| CN103711487B (en) | 2017-01-11 |
| CA2827180A1 (en) | 2014-04-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2713002B1 (en) | Rock drilling rig and method of positioning rock drilling unit | |
| JP5037678B2 (en) | Drilling pattern orientation method in curved tunnel, rock drilling device and software product | |
| AU2017232167B2 (en) | Automated device for drilling a hole in the vault and walls of a tunnel and for installing an anchoring element into said hole | |
| JP4354343B2 (en) | Position measurement system | |
| US9500079B2 (en) | Method and control system for a mining vehicle and a mining vehicle | |
| EP2725183B1 (en) | Mining vehicle and method of moving boom | |
| CN104296733B (en) | Laser positioning device of heading machine and heading machine | |
| JPH068733B2 (en) | Laser positioner and fixed point marking method using the same | |
| KR102502925B1 (en) | Apparatus and method for automated pick-up and laying of segments forming tunnel linings | |
| CN103821510B (en) | Development machine and its cut head positioning system, cut system and cutting process | |
| JP7032733B2 (en) | Tunnel spray control method | |
| JP3418682B2 (en) | Integrated surveying system for tunnels | |
| AU2006263771A1 (en) | Arrangement for positioning rock drilling rig on drilling site | |
| KR20190002600A (en) | Inspection system, control device, control method and recording medium | |
| JP2011236589A (en) | Excavator | |
| JP2005220627A (en) | Boring positioning control method in rock drill mounted carriage | |
| ES2921400T3 (en) | Method and device for the automated arrangement of tunnel shoring segments | |
| JP2004138422A (en) | Method of surveying in tunnel hole and system of surveying in tunnel hole | |
| JP2018066659A (en) | Position posture measurement system of heavy machines | |
| JP2022074712A (en) | Vacancy information acquisition method within tunnel | |
| JPH06501755A (en) | How to drill holes in rock | |
| JP7572675B2 (en) | Driving device and driving method for construction machinery | |
| JP2024086016A (en) | Construction machine with motion capture target | |
| PL238569B1 (en) | Method for positioning of a device and/or movable element of a device, preferably within the area of the mining breast heading | |
| JP2000283715A (en) | Method for detecting center of rotation of rotating section of free profile excavator |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| 17P | Request for examination filed |
Effective date: 20141002 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20160511 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 840177 Country of ref document: AT Kind code of ref document: T Effective date: 20161115 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602012024534 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| REG | Reference to a national code |
Ref country code: NO Ref legal event code: T2 Effective date: 20161026 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20161026 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 840177 Country of ref document: AT Kind code of ref document: T Effective date: 20161026 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170127 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170226 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: BE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170227 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602012024534 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170126 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 6 |
|
| 26N | No opposition filed |
Effective date: 20170727 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 602012024534 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20171001 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20171031 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20171001 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20171001 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20171031 Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180501 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20171001 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 7 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20171001 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20121001 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20161026 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230603 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 20230912 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NO Payment date: 20231010 Year of fee payment: 12 Ref country code: FI Payment date: 20231011 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20240923 Year of fee payment: 13 |