EP2589364A1 - Appareil orthopédique pour tenir et positionner un membre inférieur - Google Patents
Appareil orthopédique pour tenir et positionner un membre inférieur Download PDFInfo
- Publication number
- EP2589364A1 EP2589364A1 EP12188340.9A EP12188340A EP2589364A1 EP 2589364 A1 EP2589364 A1 EP 2589364A1 EP 12188340 A EP12188340 A EP 12188340A EP 2589364 A1 EP2589364 A1 EP 2589364A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- translation
- tertiary
- slide
- orthopedic
- guiding means
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G13/00—Operating tables; Auxiliary appliances therefor
- A61G13/0036—Orthopaedic operating tables
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G13/00—Operating tables; Auxiliary appliances therefor
- A61G13/0036—Orthopaedic operating tables
- A61G13/0081—Orthopaedic operating tables specially adapted for hip surgeries
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G13/00—Operating tables; Auxiliary appliances therefor
- A61G13/10—Parts, details or accessories
- A61G13/12—Rests specially adapted therefor; Arrangements of patient-supporting surfaces
- A61G13/1205—Rests specially adapted therefor; Arrangements of patient-supporting surfaces for specific parts of the body
- A61G13/125—Ankles or feet
Definitions
- the present invention relates to an orthopedic device for holding and positioning a lower limb of a patient during an orthopedic surgery operation.
- the present invention finds particular application in the field of reconstructive orthopedic surgery, in particular for the installation of hip prostheses.
- US5645079A discloses an orthopedic apparatus of the prior art for holding and positioning a lower limb of a patient during an orthopedic surgery operation.
- the patient is placed in a supine position on a surgical operating table.
- the orthopedic device of US5645079A comprises means for securing the orthopedic appliance to the surgical operating table, a support for the patient's foot, a carriage for guiding the support in translation along the mechanical axis of the lower limb of a patient and a joint for making rotate the support in a vertical plane.
- the orthopedic device US5645079A includes a motor for adjusting and adjusting the position of the orthopedic appliance to the length of the lower limb.
- the present invention aims to solve, in whole or in part, the problems mentioned above.
- an orthopedic apparatus comprises three translation mechanisms parallel to a longitudinal direction, namely a very precise translation mechanism, for example continuously variable, a precise and discrete translation mechanism and a mechanism less accurate translation to "pre-position" the orthopedic device quickly depending on the length of the lower limb of a patient.
- an operator can adjust, in a fast and accurate manner, the position of the orthopedic appliance to the length of the patient's lower limb, particularly when the hip is placed in hyperextension to improve the vision of the operative site.
- step denotes the spacing between two consecutive stable positions that an operator can select.
- a step is preferably constant. Alternatively, the step may be variable.
- the term "mechanical axis of the lower limb” refers to the rectilinear direction that connects the center of the femoral head to the center of the ankle.
- the mechanical axis of the lower limb of a patient is substantially vertical when the patient is standing.
- hypoextension refers to a forced extension of the hip that is sufficient to allow exposure of the femoral canal to position the femoral implant.
- the slide and the third translation guiding means are adapted to be nested mutually at least over part of their respective lengths.
- the slide and the third guide means form a telescopic connection, slide type or sliding pivot.
- the slider and the third translation guiding means are movable between a compact configuration, in which the slider and the third translation guiding means are mutually interlocked, and an extended configuration, in which the slider extends the third guiding means. in translation.
- the orthopedic device facilitates its transport and storage in a small volume.
- the third translation guiding means are adapted to penetrate into a housing defined by the slide.
- the third translation guiding means are nestable in the slide.
- the cross section of the slide is greater than the cross section of the third translation guide means.
- the mechanical strength of the slide is therefore relatively important because the slide has a high moment of inertia.
- the length of the slide is greater than or equal to the length of the third guide means in translation.
- the third translation guide means are fully nestable in the slide.
- the term "length” refers to a dimension measured along the longitudinal direction.
- the third translation guiding means comprise a profile which is unique and which is connected to the slide by complementarity of shapes.
- single profile indicates that the cross section of the profile is defined by a single surface.
- the profile has generally the shape of a cylinder with a circular base, the connection between the profile and the slide being adapted to allow the rotation of the slide around the axis of the cylinder.
- each secondary step is between 5 mm and 30 mm, preferably between 10 mm and 25 mm, and each tertiary step is between 25 mm and 200 mm, preferably between 40 mm and 70 mm.
- Such secondary and tertiary steps allow the operator two levels of precision in the adjustment of the length of the orthopedic device: on the one hand a coarse but rapid pre-positioning by the tertiary step, and then a positioning more precise by the secondary step.
- the second translation guiding means have a plurality of secondary notches which are arranged to respectively define the discrete secondary positions.
- the secondary notches are defined by the carriage, instead of being defined by the second translation guide means.
- the third translation guiding means have a plurality of tertiary notches which are arranged to respectively define the discrete tertiary positions.
- the secondary notches are defined by the slide, instead of being defined by the third guide means in translation.
- the first translation guiding means are adapted to allow a translation according to continuous primary positions.
- an operator can adjust, very accurately, the position of the orthopedic device to the length of the patient's lower limb.
- the support comprises a primary bearing
- the first translational guiding means comprise a threaded rod arranged in helical connection with the primary bearing
- the orthopedic apparatus further comprises a primary manual actuator for moving the support in translation, a secondary manual actuator for moving the carriage in translation and a tertiary manual actuator for moving the slide in translation.
- Such manual actuators allow an operator to manually adjust the length of the orthopedic device.
- Such manual actuators have a very small footprint and weight, which makes an orthopedic apparatus according to the invention easy to transport and store.
- the primary manual actuator is a wheel adapted to perform the rotation of the threaded rod.
- Such a secondary manual actuator has a normally locked position, which exempts the operator to perform a specific action to block in translation the second translation guide means.
- such a tertiary manual actuator has a normally locked position, which exempts the operator to perform a specific action to block in translation the third translation guide means.
- the orthopedic apparatus further comprises a shoe for receiving a foot of the patient and wherein the support comprises means for binding to the shoe.
- the support comprises rotation means adapted to rotate the foot of a patient in internal rotation and external rotation.
- Such means of rotation facilitate the dislocation of the hip allow the cervicotomy of the femoral neck, and then the extraction of the femoral head and the exposure of the femoral canal, so as to position the femoral implant.
- the orthopedic apparatus further comprises a stand intended to rest on a floor when the lower limb of the patient rests on the orthopedic device, the stand being connected to the slide by means of a pivot connection axis perpendicular to the longitudinal direction, the pivot connection being disposed in a distal portion of the slide, preferably at the distal end of the slide.
- the orthopedic apparatus further comprises at least one wheel connected to the end portion of the stand which is opposite to the distal portion of the slide.
- a user can easily transport the orthopedic device by rolling it on a floor.
- the translation can be a curvilinear translation or a rotation with a relatively large radius of curvature, for example with respect to the length of the patient's lower limb.
- the radius of curvature must be selected so that the movement corresponds "globally" to a translation along the longitudinal direction.
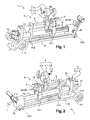
- the Figures 1 and 2 illustrate an orthopedic device 1 for holding and positioning a lower limb of a patient during an orthopedic surgery operation.
- the patient is placed in a supine position on a surgical operating table.
- the orthopedic appliance 1 comprises securing means 2 which are adapted to secure the orthopedic appliance 1 to a surgical operating table.
- the fixing means 2 comprise a receptacle 2.1 having a housing 2.2 of square-shaped prismatic shape.
- the housing 2.2 is adapted to receive an unrepresented male member which has a shape complementary to the housing 2.2 and which is integral with the orthopedic table not shown.
- the fixing means 2 further comprise a key 2.3 which is adapted to penetrate into a complementary orifice of the male member, so as to block the male member in position in the housing 2.2.
- the orthopedic apparatus 1 further comprises a support 4 which is adapted to support a 5.1 foot of a patient visible to the figure 6 or 7 .
- the support 4 comprises a base 4.1 and a hook 4.2.
- the hook 4.2 is adapted to receive and retain a shoe 5.2, shown in broken lines, in which is inserted the foot 5.1 of the patient.
- the shoe 5.2 is intended to receive the 5.1 foot.
- the hook 4.2 forms means of connection to the shoe 5.2.
- the support 4 further comprises rotation means 4.3 which are adapted to rotate the patient's foot 5.1 in internal rotation and in external rotation, by pivoting the shoe 5.2.
- the directions of internal rotation and external rotation are symbolized by figure 6 by arrows 1.5.1 and E.5.1.
- the orthopedic apparatus 1 comprises a carriage 6 which comprises first translation guide means which are adapted to guide the support 4 in translation generally in a longitudinal direction X6, which is generally parallel to the mechanical axis X7 of the member lower 7 of a patient.
- the support 4 comprises a primary bearing 4.4 which is here formed by a nut mounted around the threaded rod 8.
- the first translation guiding means essentially comprise a threaded rod 8 which is arranged in helical connection with the primary bearing 4.4.
- the threaded rod 8 is rotatably mounted about its axis X8 by means of rings 8.1 and 8.2 with polymer flanges, which are here arranged at the ends of the threaded rod 8.
- bearings may be substituted for the rings 8.1 and 8.2 .
- the first translation guiding means are adapted to allow translation along primary continuous positions, along the axis X8.
- the carriage 6 further comprises a primary manual actuator formed here by a flywheel 9.
- the flywheel 9 is adapted to carry out the rotation of the threaded rod 8.
- the flywheel 9 is here integral in rotation with the threaded rod 8.
- the support 4 moves in translation parallel to the axis X8 of the threaded rod 8.
- the operator can thus easily perform a very precise adjustment according to positions continuous primary along the X8 axis, thus parallel to the longitudinal direction X6.
- the operator can move the support 4 between an extreme position illustrated in FIG. figure 4 and a median position illustrated at the figure 5 .
- the orthopedic apparatus 1 further comprises a hinge 10 which is connected to the fixing means 2 and which is adapted to allow pivoting of the support 4 in a plane P substantially parallel to the longitudinal direction X6.
- the support 4 can rotate in rotation about a pivot axis Y10.
- the plane P is globally vertical. In practice, most of the components of the orthopedic device 1 pivot with the support 4.
- the articulation 10 is adapted to allow pivoting of the support 4 around a substantially vertical axis Z10, so as to allow the internal or external rotation of the lower limb 7.
- the orthopedic device 1 comprises a slide 12 which comprises second translation guide means adapted to guide the carriage 6 in translation generally parallel to the longitudinal direction X6.
- the second translational guiding means comprise sliding bearings 13.1 and 13.2 which are integral with the carriage 6.
- the sliding bearings 13.1 and 13.2 may for example be formed of polymer bearings or needle bearings. .
- the second translation guiding means are adapted to allow a translation along discrete secondary positions spaced two by two by a secondary pitch P2, shown in FIG. figure 6 .
- the second translation guiding means have a plurality of secondary notches 14 which are arranged to respectively define the discrete secondary positions. In other words, two secondary notches 14 are separated by the secondary pitch P2.
- the secondary pitch P2 is constant.
- the orthopedic apparatus 1 further comprises a secondary manual actuator 16 for moving the carriage 4 in translation.
- the secondary manual actuator 16 comprises a secondary abutment member 16.1 which is adapted to cooperate with each secondary detent 14.
- the secondary abutment member 16.1 is contained in the sliding bearing 13.1.
- the secondary abutment member 16.1 is movable between an abutment position, in which the secondary abutment member 16.1 prevents the translation of the carriage 4 with respect to the slider 12, and a release position, in which the carriage 4 can be displaced in translation relative to the slide 12.
- each secondary notch 14 forms a stop means adapted to cooperate with the secondary abutment member 16.1.
- the secondary manual actuator 16 further comprises a secondary elastic return member 16.2 which is arranged to return the secondary abutment member 16.1 towards its abutment position ( figure 10 or 11 ).
- the secondary elastic return member 16.2 is formed by a helical spring working in compression.
- the secondary manual actuator 16 comprises a secondary release member, in this case a button, which is arranged to place the secondary stop member 16.1 in its release position.
- an operator pulls on the button of the secondary manual actuator 16 so as to place the secondary stop member 16.1 in the release position. Then, the operator can slide the carriage 4 parallel to the longitudinal direction X6, by moving the slide bearings 13.1 and 13.2 on the slide 12. After the operator has released its traction on the button, the elastic member of secondary return 16.2 recalls the secondary stop member 16.1 towards its stop position, in which the carriage 4 is integral in translation with the slide 12.
- the orthopedic device 1 further comprises a stand 18 which is intended to rest on the floor 3 when the lower limb 7 of the patient rests on the orthopedic device 1.
- the stand 18 is connected to the slide 12 by means of a pivot connection 20 Y20 axis perpendicular to the longitudinal direction X6.
- the pivot connection 20 is disposed at the distal end of the slide 12.
- the orthopedic apparatus 1 further comprises rollers 22 which are connected to the end portion of the stand 18 which is opposed to the distal portion of the slide 12.
- the rollers 22 are arranged to rest on the floor 3 when the orthopedic device 1 is in the service configuration or in the transport configuration.
- the orthopedic device 1 comprises third translation guide means which are adapted to guide the slide 12 in translation generally parallel to the longitudinal direction X6.
- the third translation guiding means comprise a profile 24 which is unique and which is connected to the slide 12 by complementarity of shapes.
- the profile 24 has globally the shape of a cylinder with a circular base and whose axis X24, visible at the figure 6 , is substantially parallel to the longitudinal direction X6.
- connection between the profile and the slide is adapted to allow the rotation of the slide 12 around the axis of the cylinder.
- the connection between the slide 12 and the profile 24 is a pivot-sliding connection.
- the slide 12 and the profile 24, which forms the third translational guiding means, are adapted to be nested mutually over almost the entire length L24 of the profile 24. Measured parallel to the longitudinal direction X6, the length L12 of the slide 12 is substantially equal to the length L24 of the profile 24. Typically, the length L12 and the length L24 may be about 800 mm. In other words, the third translation guiding means are fully nestable in the slide 12. Thus, the volume occupied by the orthopedic appliance 1 in a compact configuration is minimized ( Figures 1 and 2 ), which facilitates its transportation and storage.
- the profile 24 which is adapted to enter a housing 26 defined by the slide 12.
- the slide 12 has a hollow section defining the housing 26 in the form of a cylinder complementary to the profile 24 and whose axis X12 visible at figure 6 , is substantially parallel to the longitudinal direction X6.
- the X12 axis is substantially collinear with the X24 axis.
- the profile 24, which forms the third translational guiding means, is adapted to allow a translation along discrete tertiary positions and spaced two by two by a tertiary step P3.
- the profile 24 has a plurality of tertiary notches 28 which are arranged to respectively define the discrete tertiary positions.
- the tertiary step P3 is constant. In addition, the tertiary step P3 is substantially greater than the secondary step P2. In this case, each secondary step P2 measures about 20 mm, while each tertiary step P3 is about 50 mm.
- the orthopedic apparatus 1 further comprises a tertiary manual actuator 32 for moving the slide 12 in translation.
- the tertiary manual actuator 32 comprises a tertiary stop member 32.1 which is adapted to cooperate with each tertiary catch 28, as shown in FIGS. Figures 10 and 11 .
- the tertiary abutment member 32.1 is movable between an abutment position, in which the tertiary abutment member 32.1 prevents the translation of the slider 12 relative to the profile 24, and a release position, in which the slider 12 can be displaced in translation relative to the section 24.
- each tertiary notch 28 forms a stop means adapted to cooperate with the tertiary stop member 32.1.
- the tertiary manual actuator 32 further comprises a tertiary resilient biasing member (e.g., a helical spring operating in compression) which is arranged to bias the tertiary stop member 32.1 toward its abutment position.
- a tertiary resilient biasing member e.g., a helical spring operating in compression
- the tertiary manual actuator 32 includes a tertiary release member, in this case a button, which is arranged to place the tertiary stop member 32.1 in its release position.
- an operator pulls on the button of the tertiary manual actuator 32 so as to place the tertiary stop member 32.1 in the release position. Then, the operator can slide the slide 12 parallel to the longitudinal direction X6. After the operator has released his traction on the button, the tertiary return elastic member recalls the tertiary stop member 32.1 towards its stop position, in which the slide 12 is integral in translation with the profile 24.
- the Figures 8 and 9 respectively illustrate a hyperextension position of a lower limb 7 of a large patient and a position of hyperextension of a lower limb 7 of a small patient.
- the angle between the slide 12 and the stand 18 is about 90 degrees. In the position of hyperextension illustrated in figure 8 , the angle between the slide 12 and the stand 18 is about 230 degrees.
- the hip prosthesis can be placed on the patient.
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Orthopedics, Nursing, And Contraception (AREA)
- Prostheses (AREA)
- Accommodation For Nursing Or Treatment Tables (AREA)
Abstract
Description
- La présente invention concerne un appareil orthopédique pour tenir et positionner un membre inférieur d'un patient au cours d'une opération de chirurgie orthopédique.
- La présente invention trouve notamment application dans le domaine de la chirurgie orthopédique réparatrice, en particulier pour la pose de prothèses de hanches.
-
US5645079A décrit un appareil orthopédique de l'art antérieur, pour tenir et positionner un membre inférieur d'un patient au cours d'une opération de chirurgie orthopédique. Le patient est placé en position de décubitus dorsal sur une table d'opération chirurgicale. L'appareil orthopédique deUS5645079A comprend des moyens pour fixer l'appareil orthopédique à la table d'opération chirurgicale, un support pour le pied du patient, un chariot pour guider le support en translation suivant l'axe mécanique du membre inférieur d'un patient et une articulation pour faire pivoter le support dans un plan vertical. - Il est nécessaire d'ajuster la position d'un tel appareil orthopédique à la longueur du membre inférieur de chaque patient, en particulier pour placer la hanche en hyperextension. Cependant, l'appareil orthopédique de
US5645079A comprend un moteur pour régler et ajuster la position de l'appareil orthopédique à la longueur du membre inférieur. - Or, un tel moteur réalise un mouvement de translation particulièrement lent pour obtenir la précision requise. En outre, un tel moteur a une certaine inertie qui altère la précision du positionnement de l'appareil orthopédique. De plus, les moteurs de
US5645079A rendent l'appareil orthopédique relativement lourd et encombrant, donc difficile à utiliser, à transporter et à ranger. - La présente invention vise notamment à résoudre, en tout ou partie, les problèmes mentionnés ci-avant.
- A cet effet, l'invention a pour objet un appareil orthopédique, pour tenir et positionner un membre inférieur d'un patient au cours d'une opération de chirurgie orthopédique, l'appareil orthopédique comprenant :
- des moyens de fixation adaptés pour fixer l'appareil orthopédique à une table d'opération chirurgicale ;
- un support adapté pour supporter le pied du patient ;
- un chariot comportant des premiers moyens de guidage en translation adaptés pour guider le support en translation suivant une direction longitudinale qui est globalement parallèle à l'axe mécanique du membre inférieur ;
- une articulation liée aux moyens de fixation et adaptée pour permettre au moins un pivotement du support dans un plan globalement parallèle à la direction longitudinale ;
- une coulisse comportant des deuxièmes moyens de guidage en translation adaptés pour guider le chariot en translation globalement parallèlement à la direction longitudinale, les deuxièmes moyens de guidage en translation étant adaptés pour permettre une translation suivant des positions secondaires discrètes espacées deux à deux par un pas secondaire ; et
- des troisièmes moyens de guidage en translation adaptés pour guider la coulisse en translation globalement parallèlement à la direction longitudinale, les troisièmes moyens de guidage en translation étant adaptés pour permettre une translation suivant des positions tertiaires discrètes espacées deux à deux par un pas tertiaire, le pas tertiaire étant substantiellement supérieur au pas secondaire.
- En d'autres termes, un appareil orthopédique conforme à l'invention comprend trois mécanismes de translation parallèlement à une direction longitudinale, à savoir un mécanisme de translation très précis, par exemple à variation continue, un mécanisme de translation précis et discret et un mécanisme de translation moins précis pour « pré-positionner » rapidement l'appareil orthopédique en fonction de la longueur du membre inférieur d'un patient.
- Ainsi, un opérateur peut ajuster, de manière à la fois rapide et précise, la position de l'appareil orthopédique à la longueur du membre inférieur du patient, en particulier lorsque la hanche est placée en hyperextension pour améliorer la vision du site opératoire.
- Dans la présente demande, le terme « pas » désigne l'écartement entre deux positions consécutives stables qu'un opérateur peut sélectionner. Un pas est de préférence constant. Alternativement, le pas peut être variable.
- Dans la présente demande, le terme « axe mécanique du membre inférieur » désigne la direction rectiligne qui relie le centre de la tête fémorale au centre de la cheville. Ainsi, l'axe mécanique du membre inférieur d'un patient est sensiblement vertical lorsque le patient est debout.
- Dans la présente demande, le terme « hyperextension » désigne une extension forcée de la hanche qui est suffisante pour permettre une exposition du canal fémoral afin de positionner l'implant fémoral.
- Selon un mode de réalisation de l'invention, la coulisse et les troisièmes moyens de guidage en translation sont adaptés pour être emboîtés mutuellement au moins sur une partie de leurs longueurs respectives.
- En d'autres termes, la coulisse et les troisièmes moyens de guidage forme une liaison télescopique, de type glissière ou pivot glissant.
- Ainsi, la coulisse et les troisièmes moyens de guidage en translation sont mobiles entre une configuration compacte, dans laquelle la coulisse et les troisièmes moyens de guidage en translation sont mutuellement emboîtés, et une configuration étendue, dans laquelle la coulisse prolonge les troisièmes moyens de guidage en translation. En configuration compacte, l'appareil orthopédique facilite son transport et son rangement dans un volume réduit.
- Selon un mode de réalisation de l'invention, les troisièmes moyens de guidage en translation sont adaptés pour pénétrer dans un logement défini par la coulisse.
- En d'autres termes, les troisièmes moyens de guidage en translation sont emboîtables dans la coulisse.
- Ainsi, la section transversale de la coulisse est supérieure à la section transversale des troisièmes moyens de guidage en translation. La résistance mécanique de la coulisse est donc relativement importante, car la coulisse a un moment d'inertie élevée.
- Selon une variante de l'invention, la longueur de la coulisse est supérieure ou égale à la longueur des troisièmes moyens de guidage en translation.
- En d'autres termes, les troisièmes moyens de guidage en translation sont totalement emboîtables dans la coulisse.
- Ainsi, on minimise le volume occupé par l'appareil orthopédique en configuration compacte.
- Dans la présente demande, le terme « longueur » désigne une dimension mesurée suivant la direction longitudinale.
- Selon un mode de réalisation de l'invention, les troisièmes moyens de guidage en translation comprennent un profilé qui est unique et qui est lié à la coulisse par complémentarité de formes.
- Dans la présente demande, le terme « profilé unique » indique que la section transversale du profilé est définie par une seule surface.
- Ainsi, un tel profilé représente un encombrement et un poids relativement faibles.
- Selon un mode de réalisation de l'invention, le profilé a globalement la forme d'un cylindre à base circulaire, la liaison entre le profilé et la coulisse étant adaptée pour permettre la rotation de la coulisse autour de l'axe du cylindre.
- Ainsi, une telle liaison entre le profilé et la coulisse permet un positionnement spatial précis du membre inférieur du patient.
- Selon un mode de réalisation de l'invention, chaque pas secondaire est compris entre 5 mm et 30 mm, de préférence entre 10 mm et 25 mm, et chaque pas tertiaire est compris entre 25 mm et 200 mm, de préférence entre 40 mm et 70 mm.
- Ainsi, de tels pas secondaires et tertiaires permettent à l'opérateur deux niveaux de précision dans l'ajustement de la longueur de l'appareil orthopédique : d'une part un pré-positionnement grossier mais rapide par le pas tertiaire, puis un positionnement plus précis par le pas secondaire.
- Selon un mode de réalisation de l'invention, les deuxièmes moyens de guidage en translation présentent une pluralité de crans secondaires qui sont agencés pour définir respectivement les positions secondaires discrètes.
- Ainsi, de tels crans secondaires permettent de définir les pas secondaires de manière simple et sans encombrement.
- Selon une variante de l'invention, les crans secondaires sont définis par le chariot, au lieu d'être défini par les deuxièmes moyens de guidage en translation.
- Selon un mode de réalisation de l'invention, les troisièmes moyens de guidage en translation présentent une pluralité de crans tertiaires qui sont agencés pour définir respectivement les positions tertiaires discrètes.
- Ainsi, de tels crans tertiaires permettent de définir les pas tertiaires de manière simple et sans encombrement.
- Selon une variante de l'invention, les crans secondaires sont définis par la coulisse, au lieu d'être défini par les troisièmes moyens de guidage en translation.
- Selon un mode de réalisation de l'invention, les premiers moyens de guidage en translation sont adaptés pour permettre une translation suivant des positions primaires continues.
- Ainsi, un opérateur peut ajuster, de manière très précise, la position de l'appareil orthopédique à la longueur du membre inférieur du patient.
- Selon un mode de réalisation de l'invention, le support comprend un palier primaire, et dans lequel les premiers moyens de guidage en translation comprennent une tige filetée agencée en liaison hélicoïdale avec le palier primaire.
- Ainsi, une telle tige filetée permet de réaliser de manière simple un ajustement très précis suivant des positions primaires continues.
- Selon un mode de réalisation de l'invention, l'appareil orthopédique comprend en outre un actionneur manuel primaire pour déplacer le support en translation, un actionneur manuel secondaire pour déplacer le chariot en translation et un actionneur manuel tertiaire pour déplacer la coulisse en translation.
- Ainsi, de tels actionneurs manuels permettent à un opérateur d'ajuster manuellement la longueur de l'appareil orthopédique. De tels actionneurs manuels ont un encombrement et un poids très faibles, ce qui rend un appareil orthopédique conforme à l'invention facile à transporter et à ranger.
- Selon une variante de l'invention, l'actionneur manuel primaire est un volant adapté pour réaliser la rotation de la tige filetée.
- Ainsi, un tel volant permet à un opérateur de tourner facilement et rapidement la tige filetée.
- Selon un mode de réalisation de l'invention, l'actionneur manuel secondaire comprend au moins :
- un organe de butée secondaire adapté pour coopérer avec chaque cran secondaire, l'organe de butée secondaire étant mobile entre une position de butée, dans laquelle l'organe de butée secondaire empêche la translation du chariot par rapport à la coulisse, et une position de libération, dans laquelle le chariot peut être déplacé en translation par rapport à la coulisse ;
- un organe élastique de rappel secondaire agencé pour rappeler l'organe de butée secondaire vers sa position de butée ; et
- un organe de libération secondaire agencé de façon à placer l'organe de butée secondaire dans sa position de libération.
- Ainsi, un tel actionneur manuel secondaire présente une position normalement bloquée, ce qui dispense l'opérateur de réaliser une action spécifique en vue de bloquer en translation les deuxièmes moyens de guidage en translation.
- Selon un mode de réalisation de l'invention, l'actionneur manuel tertiaire comprend au moins :
- un organe de butée tertiaire adapté pour coopérer avec chaque cran tertiaire, l'organe de butée tertiaire étant mobile entre une position de butée, dans laquelle l'organe de butée tertiaire empêche la translation de la coulisse par rapport aux troisièmes moyens de guidage en translation, et une position de libération, dans laquelle la coulisse peut être déplacée en translation par rapport aux troisièmes moyens de guidage en translation ;
- un organe élastique de rappel tertiaire agencé pour rappeler l'organe de butée tertiaire vers sa position de butée ; et
- un organe de libération tertiaire agencé de façon à placer l'organe de butée tertiaire dans sa position de libération.
- Ainsi, un tel actionneur manuel tertiaire présente une position normalement bloquée, ce qui dispense l'opérateur de réaliser une action spécifique en vue de bloquer en translation les troisièmes moyens de guidage en translation.
- Selon une variante de l'invention, l'appareil orthopédique comprend en outre une chaussure destinée à recevoir un pied du patient et dans lequel le support comprend des moyens de liaison à la chaussure.
- Ainsi, une telle chaussure permet d'installer le membre inférieur du patient sur l'appareil orthopédique.
- Selon un mode de réalisation de l'invention, le support comprend des moyens de rotation adaptés pour faire pivoter le pied d'un patient en rotation interne et en rotation externe.
- Ainsi, de tels moyens de rotation facilitent la luxation de la hanche permettre la cervicotomie du col fémoral, puis l'extraction de la tête fémorale et l'exposition du canal fémoral, de façon à positionner l'implant fémoral.
- Selon un mode de réalisation de l'invention, l'appareil orthopédique comprend en outre une béquille destinée à reposer sur un sol lorsque le membre inférieur du patient repose sur l'appareil orthopédique, la béquille étant liée à la coulisse au moyen d'une liaison pivot d'axe perpendiculaire à la direction longitudinale, la liaison pivot étant disposée dans une partie distale de la coulisse, de préférence à l'extrémité distale de la coulisse.
- Ainsi, une telle béquille permet de transmettre au sol les efforts exercés par le poids du membre inférieur du patient. Par conséquent, les composants de l'appareil orthopédique supportent des efforts limités, ce qui nécessite un dimensionnement relativement faible.
- Le mode de réalisation de l'invention mentionné ci-avant peut être revendiqué sous forme d'une revendication indépendante des modes et variantes de réalisation mentionnés ci-avant et ci-après.
- Selon une variante de l'invention, l'appareil orthopédique comprend en outre au moins une roulette liée à la portion terminale de la béquille qui est opposée à la partie distale de la coulisse.
- Ainsi, un utilisateur peut transporter facilement l'appareil orthopédique en le faisant rouler sur un sol.
- Selon une variante de l'invention, la translation peut être une translation curviligne ou une rotation avec un rayon de courbure relativement grand, par exemple par rapport à la longueur du membre inférieur du patient. Le rayon de courbure doit être sélectionné de sorte que le mouvement correspond « globalement » à une translation suivant la direction longitudinale.
- Les modes de réalisation et les variantes mentionnés ci-avant peuvent être pris isolément ou selon toute combinaison techniquement admissible.
- La présente invention sera bien comprise et ses avantages ressortiront aussi à la lumière de la description qui va suivre, donnée uniquement à titre d'exemple non limitatif et faite en référence aux dessins annexés, dans lesquels :
- la
figure 1 est une vue en perspective d'un appareil orthopédique conforme à l'invention, dans une configuration de transport et de rangement ; - la
figure 2 est une vue en perspective de l'appareil orthopédique de lafigure 1 , vu du côté opposé à lafigure 1 ; - la
figure 3 est une vue en perspective, similaire à lafigure 2 , de l'appareil orthopédique de lafigure 1 , dans une configuration intermédiaire ; - la
figure 4 est une vue en perspective, suivant un angle équivalent à celui de lafigure 3 , d'une partie de l'appareil orthopédique de lafigure 3 , au cours d'une étape de positionnement ; - la
figure 5 est une vue similaire à lafigure 4 de la partie de l'appareil orthopédique de lafigure 4 , au cours d'une autre étape de positionnement ; - la
figure 6 est une vue similaire à lafigure 3 de l'appareil orthopédique de lafigure 3 , dans une configuration d'extension d'un genou d'un membre inférieur d'un patient de taille moyenne ; - la
figure 7 est une vue similaire à lafigure 3 de l'appareil orthopédique de lafigure 3 , dans une configuration d'extension d'un genou d'un membre inférieur d'un patient de grande taille ; - la
figure 8 est une vue en perspective, suivant un angle équivalent à lafigure 6 , de l'appareil orthopédique de lafigure 3 , dans une configuration d'hyperextension d'une hanche d'un patient de grande taille ; - la
figure 9 est une vue similaire à lafigure 8 de l'appareil orthopédique de lafigure 3 , dans une configuration d'hyperextension d'une hanche d'un patient de petite taille ; - la
figure 10 est une vue en perspective tronquée suivant le plan X à lafigure 2 ; et - la
figure 11 est une coupe suivant le plan X à lafigure 2 . - Les
figures 1 et 2 illustrent un appareil orthopédique 1 pour tenir et positionner un membre inférieur d'un patient au cours d'une opération de chirurgie orthopédique. Le patient est placé en position de décubitus dorsal sur une table d'opération chirurgicale. - L'appareil orthopédique 1 comprend des moyens de fixation 2 qui sont adaptés pour fixer l'appareil orthopédique 1 à une table d'opération chirurgicale. Dans l'exemple des figures, les moyens de fixation 2 comprennent un réceptacle 2.1 présentant un logement 2.2 de forme prismatique à base carrée. Le logement 2.2 est adapté pour recevoir un organe mâle non représenté qui a une forme complémentaire au logement 2.2 et qui est solidaire de la table orthopédique non représentée. Les moyens de fixation 2 comprennent en outre une clavette 2.3 qui est adaptée pour pénétrer dans un orifice complémentaire de l'organe mâle, de façon à bloquer l'organe mâle en position dans le logement 2.2.
- L'appareil orthopédique 1 comprend en outre un support 4 qui est adapté pour supporter un pied 5.1 d'un patient visible à la
figure 6 ou 7 . Le support 4 comprend une embase 4.1 et un crochet 4.2. Comme le montre lafigure 4 , le crochet 4.2 est adapté pour recevoir et retenir une chaussure 5.2, représentée en traits pointillés, dans laquelle est inséré le pied 5.1 du patient. La chaussure 5.2 est destinée à recevoir le pied 5.1. Le crochet 4.2 forme des moyens de liaison à la chaussure 5.2. - Le support 4 comprend en outre des moyens de rotation 4.3 qui sont adaptés pour faire pivoter le pied 5.1 du patient en rotation interne et en rotation externe, en faisant pivoter la chaussure 5.2. Les sens de rotation interne et de rotation externe sont symbolisés à la
figure 6 par les flèches 1.5.1 et E.5.1. - De plus, l'appareil orthopédique 1 comprend un chariot 6 qui comporte des premiers moyens de guidage en translation qui sont adaptés pour guider le support 4 en translation globalement suivant une direction longitudinale X6, laquelle est globalement parallèle à l'axe mécanique X7 du membre inférieur 7 d'un patient.
- Le support 4 comprend un palier primaire 4.4 qui est ici formé par un écrou monté autour de la tige filetée 8. Les premiers moyens de guidage en translation comprennent essentiellement une tige filetée 8 qui est agencée en liaison hélicoïdale avec le palier primaire 4.4. La tige filetée 8 est montée libre en rotation autour de son axe X8 au moyen de bagues 8.1 et 8.2 à collerettes en polymère, qui sont ici agencées aux extrémités de la tige filetée 8. Alternativement, des roulements peuvent être substitués aux bagues 8.1 et 8.2.
- Les premiers moyens de guidage en translation sont adaptés pour permettre une translation suivant des positions primaires continues, le long de l'axe X8. Le chariot 6 comprend en outre un actionneur manuel primaire formé ici par un volant 9. Le volant 9 est adapté pour réaliser la rotation de la tige filetée 8. Le volant 9 est ici solidaire en rotation de la tige filetée 8.
- En service, lorsqu'un opérateur exerce une rotation manuelle du volant 9, le support 4 se déplace en translation parallèlement à l'axe X8 de la tige filetée 8. L'opérateur peut ainsi réaliser de manière simple un ajustement très précis suivant des positions primaires continues le long de l'axe X8, donc parallèlement à la direction longitudinale X6. Par exemple, l'opérateur peut déplacer le support 4 entre une position extrême illustrée à la
figure 4 et une position médiane illustrée à lafigure 5 . - L'appareil orthopédique 1 comprend en outre une articulation 10 qui est liée aux moyens de fixation 2 et qui est adaptée pour permettre un pivotement du support 4 dans un plan P globalement parallèle à la direction longitudinale X6. En l'occurrence, le support 4 peut pivoter en rotation autour d'un axe de pivotement Y10. Dans l'exemple des figures, le plan P est globalement vertical. En pratique, la plupart des composants de l'appareil orthopédique 1 pivotent avec le support 4.
- De plus, comme le montre la figure l'articulation 10 est adaptée pour permettre un pivotement du support 4 autour d'un axe Z10 sensiblement vertical, de façon à permettre la rotation interne ou externe du membre inférieur 7.
- En outre, l'appareil orthopédique 1 comprend une coulisse 12 qui comporte des deuxièmes moyens de guidage en translation adaptés pour guider le chariot 6 en translation globalement parallèlement à la direction longitudinale X6. Dans l'exemple des figures, les deuxièmes moyens de guidage en translation comprennent des paliers à glissière 13.1 et 13.2 qui sont solidaires du chariot 6. Les paliers à glissière 13.1 et 13.2 peuvent par exemple être formés de paliers en polymères ou de roulements à aiguilles.
- Les deuxièmes moyens de guidage en translation sont adaptés pour permettre une translation suivant des positions secondaires discrètes espacées deux à deux par un pas secondaire P2, représenté à la
figure 6 . Comme le montrent lesfigures 4, 5 et6 , les deuxièmes moyens de guidage en translation présentent une pluralité de crans secondaires 14 qui sont agencés pour définir respectivement les positions secondaires discrètes. En d'autres termes, deux crans secondaires 14 sont séparés par le pas secondaire P2. Dans l'exemple des figures, le pas secondaire P2 est constant. - L'appareil orthopédique 1 comprend en outre un actionneur manuel secondaire 16 pour déplacer le chariot 4 en translation. Comme le montre les
figures 10 et 11 , l'actionneur manuel secondaire 16 comprend un organe de butée secondaire 16.1 qui est adapté pour coopérer avec chaque cran secondaire 14. L'organe de butée secondaire 16.1 est contenu dans le palier à glissière 13.1. - L'organe de butée secondaire 16.1 est mobile entre une position de butée, dans laquelle l'organe de butée secondaire 16.1 empêche la translation du chariot 4 par rapport à la coulisse 12, et une position de libération, dans laquelle le chariot 4 peut être déplacé en translation par rapport à la coulisse 12. En d'autres termes, chaque cran secondaire 14 forme un moyen d'arrêt adapté pour coopérer avec l'organe de butée secondaire 16.1.
- Comme le montre la
figure 11 , l'actionneur manuel secondaire 16 comprend en outre un organe élastique de rappel secondaire 16.2 qui est agencé pour rappeler l'organe de butée secondaire 16.1 vers sa position de butée (figure 10 ou 11 ). Dans l'exemple desfigures 10 et 11 , l'organe élastique de rappel secondaire 16.2 est formé par un ressort hélicoïdal travaillant en compression. De plus, l'actionneur manuel secondaire 16 comprend un organe de libération secondaire, en l'occurrence un bouton, qui est agencé de façon à placer l'organe de butée secondaire 16.1 dans sa position de libération. - En service, un opérateur exerce une traction sur le bouton de l'actionneur manuel secondaire 16 de façon à placer l'organe de butée secondaire 16.1 en position de libération. Puis, l'opérateur peut faire coulisser le chariot 4 parallèlement à la direction longitudinale X6, en déplaçant les paliers à glissière 13.1 et 13.2 sur la coulisse 12. Après que l'opérateur a relâché sa traction sur le bouton, l'organe élastique de rappel secondaire 16.2 rappelle l'organe de butée secondaire 16.1 vers sa position de butée, dans laquelle le chariot 4 est solidaire en translation de la coulisse 12.
- Comme le montre la
figure 3 ,6 ou 7 , l'appareil orthopédique 1 comprend en outre une béquille 18 qui est destinée à reposer sur le sol 3 lorsque le membre inférieur 7 du patient repose sur l'appareil orthopédique 1. La béquille 18 est liée à la coulisse 12 au moyen d'une liaison pivot 20 d'axe Y20 perpendiculaire à la direction longitudinale X6. La liaison pivot 20 est disposée à l'extrémité distale de la coulisse 12. - L'appareil orthopédique 1 comprend en outre des roulettes 22 qui sont liées à la portion terminale de la béquille 18 qui est opposée à la partie distale de la coulisse 12. En d'autres termes, les roulettes 22 sont agencées pour reposer sur le sol 3 lorsque l'appareil orthopédique 1 est en configuration de service ou en configuration de transport.
- En outre, l'appareil orthopédique 1 comprend des troisièmes moyens de guidage en translation qui sont adaptés pour guider la coulisse 12 en translation globalement parallèlement à la direction longitudinale X6.
- Dans l'exemple des figures, les troisièmes moyens de guidage en translation comprennent un profilé 24 qui est unique et qui est lié à la coulisse 12 par complémentarité de formes. En l'occurrence, le profilé 24 a globalement la forme d'un cylindre à base circulaire et dont l'axe X24, visible à la
figure 6 , est substantiellement parallèle à la direction longitudinale X6. - La liaison entre le profilé et la coulisse est adaptée pour permettre la rotation de la coulisse 12 autour de l'axe du cylindre. En d'autres termes, la liaison entre la coulisse 12 et le profilé 24 est une liaison pivot-glissant.
- La coulisse 12 et le profilé 24, qui forme les troisièmes moyens de guidage en translation, sont adaptés pour être emboîtés mutuellement sur presque toute la longueur L24 du profilé 24. Mesurée parallèlement à la direction longitudinale X6, la longueur L12 de la coulisse 12 est sensiblement égale à la longueur L24 du profilé 24. Typiquement, la longueur L12 et la longueur L24 peuvent être d'environ 800 mm. En d'autres termes, les troisièmes moyens de guidage en translation sont totalement emboîtables dans la coulisse 12. Ainsi, on minimise le volume occupé par l'appareil orthopédique 1 en configuration compacte (
figures 1 et 2 ), ce qui facilite son transport et son rangement. - Comme le montre la
figure 6 ou 7 , c'est le profilé 24 qui est adapté pour pénétrer dans un logement 26 défini par la coulisse 12. En pratique, la coulisse 12 a une section creuse définissant le logement 26 en forme de cylindre complémentaire au profilé 24 et dont l'axe X12, visible à lafigure 6 , est substantiellement parallèle à la direction longitudinale X6. Comme le montrent lesfigures 4 et 5 , l'axe X12 est substantiellement colinéaire à l'axe X24. - Le profilé 24, qui forme les troisièmes moyens de guidage en translation, est adapté pour permettre une translation suivant des positions tertiaires discrètes et espacées deux à deux par un pas tertiaire P3. À cet effet, le profilé 24 présente une pluralité de crans tertiaires 28 qui sont agencés pour définir respectivement les positions tertiaires discrètes.
- Dans l'exemple des figures, le pas tertiaire P3 est constant. De plus, le pas tertiaire P3 est substantiellement supérieur au pas secondaire P2. En l'occurrence, chaque pas secondaire P2 mesure environ 20 mm, alors que chaque pas tertiaire P3 mesure environ 50 mm.
- L'appareil orthopédique 1 comprend en outre un actionneur manuel tertiaire 32 pour déplacer la coulisse 12 en translation. Comme L'actionneur manuel secondaire 16, l'actionneur manuel tertiaire 32 comprend un organe de butée tertiaire 32.1 qui est adapté pour coopérer avec chaque cran tertiaire 28, comme le montre les
figures 10 et 11 . - L'organe de butée tertiaire 32.1 est mobile entre une position de butée, dans laquelle l'organe de butée tertiaire 32.1 empêche la translation de la coulisse 12 par rapport au profilé 24, et une position de libération, dans laquelle la coulisse 12 peut être déplacée en translation par rapport au profilé 24. En d'autres termes, chaque cran tertiaire 28 forme un moyen d'arrêt adapté pour coopérer avec l'organe de butée tertiaire 32.1.
- L'actionneur manuel tertiaire 32 comprend en outre un organe élastique de rappel tertiaire (par exemple, un ressort hélicoïdal travaillant en compression) qui est agencé pour rappeler l'organe de butée tertiaire 32.1 vers sa position de butée. De plus, l'actionneur manuel tertiaire 32 comprend un organe de libération tertiaire, en l'occurrence un bouton, qui est agencé de façon à placer l'organe de butée tertiaire 32.1 dans sa position de libération.
- En service, un opérateur exerce une traction sur le bouton de l'actionneur manuel tertiaire 32 de façon à placer l'organe de butée tertiaire 32.1 en position de libération. Puis, l'opérateur peut faire coulisser la coulisse 12 parallèlement à la direction longitudinale X6. Après que l'opérateur a relâché sa traction sur le bouton, l'organe élastique de rappel tertiaire rappelle l'organe de butée tertiaire 32.1 vers sa position de butée, dans laquelle la coulisse 12 est solidaire en translation du profilé 24.
- Les
figures 8 et 9 illustrent respectivement une position d'hyperextension d'un membre inférieur 7 d'un patient de grande taille et une position d'hyperextension d'un membre inférieur 7 d'un patient de petite taille. - En service, comme le montre la comparaison entre les
figures 7 et8 , le pivotement du support 4 est réalisé entre : - une position d'extension du genou du membre inférieur 7 (
figure 6 ou 7 ), dans laquelle la direction longitudinale X6 est globalement horizontale dans le prolongement de la table orthopédique, et - une position d'hyperextension du membre inférieur 7 (
figure 8 ou 9 ), dans laquelle la direction longitudinale s'étend obliquement depuis les moyens de fixation 2 jusqu'au sol 3 sur lequel repose l'appareil orthopédique 1. - Dans la position d'extension illustrée à la
figure 7 , l'angle entre la coulisse 12 et la béquille 18 est d'environ 90 degrés. Dans la position d'hyperextension illustrée à lafigure 8 , l'angle entre la coulisse 12 et la béquille 18 est d'environ 230 degrés. Lorsque le membre inférieur 7 est en position d'hyperextension, la prothèse de hanche peut être posée sur le patient.
Claims (15)
- Appareil orthopédique (1), pour tenir et positionner un membre inférieur (7) d'un patient au cours d'une opération de chirurgie orthopédique, l'appareil orthopédique (1) comprenant :- des moyens de fixation (2) adaptés pour fixer l'appareil orthopédique (1) à une table d'opération chirurgicale ;- un support (4) adapté pour supporter le pied (5.1) du patient ;- un chariot (6) comportant des premiers moyens de guidage en translation adaptés pour guider le support (4) en translation suivant une direction longitudinale (X6) qui est globalement parallèle à l'axe mécanique (X7) du membre inférieur (7) ;- une articulation (10) liée aux moyens de fixation (2) et adaptée pour permettre au moins un pivotement du support (4) dans un plan (P) globalement parallèle à la direction longitudinale (X6) ;l'appareil orthopédique (1) étant caractérisé en ce qu'il comprend en outre :- une coulisse (12) comportant des deuxièmes moyens de guidage en translation adaptés pour guider le chariot (6) en translation globalement parallèlement à la direction longitudinale (X6), les deuxièmes moyens de guidage en translation étant adaptés pour permettre une translation suivant des positions secondaires discrètes espacées deux à deux par un pas secondaire (P2) ; et- des troisièmes moyens de guidage en translation adaptés pour guider la coulisse (12) en translation globalement parallèlement à la direction longitudinale (X6), les troisièmes moyens de guidage en translation étant adaptés pour permettre une translation suivant des positions tertiaires discrètes espacées deux à deux par un pas tertiaire (P3), le pas tertiaire (P3) étant substantiellement supérieur au pas secondaire (P2).
- Appareil orthopédique (1) selon la revendication 1, dans lequel la coulisse (12) et les troisièmes moyens de guidage en translation sont adaptés pour être emboîtés mutuellement au moins sur une partie de leurs longueurs respectives (L12, L24).
- Appareil orthopédique (1) selon la revendication 2, dans lequel les troisièmes moyens de guidage en translation sont adaptés pour pénétrer dans un logement défini par la coulisse (12).
- Appareil orthopédique (1) selon l'une des revendications précédentes, dans lequel les troisièmes moyens de guidage en translation comprennent un profilé (24) qui est unique et qui est lié à la coulisse (12) par complémentarité de formes.
- Appareil orthopédique (1) selon la revendication 4, dans lequel le profilé (24) a globalement la forme d'un cylindre à base circulaire, la liaison entre le profilé et la coulisse (12) étant adaptée pour permettre la rotation de la coulisse (12) autour de l'axe du cylindre.
- Appareil orthopédique (1) selon l'une des revendications précédentes, dans lequel chaque pas secondaire (P2) est compris entre 5 mm et 30 mm, de préférence entre 10 mm et 25 mm, et dans lequel chaque pas tertiaire (P3) est compris entre 25 mm et 200 mm, de préférence entre 40 mm et 70 mm.
- Appareil orthopédique (1) selon l'une des revendications précédentes, dans lequel les deuxièmes moyens de guidage en translation présentent une pluralité de crans secondaires (14) qui sont agencés pour définir respectivement les positions secondaires discrètes.
- Appareil orthopédique (1) selon l'une des revendications précédentes, dans lequel les troisièmes moyens de guidage en translation présentent une pluralité de crans tertiaires (28) qui sont agencés pour définir respectivement les positions tertiaires discrètes.
- Appareil orthopédique (1) selon l'une des revendications précédentes, dans lequel les premiers moyens de guidage en translation sont adaptés pour permettre une translation suivant des positions primaires continues.
- Appareil orthopédique (1) selon la revendication 9, dans lequel le support (4) comprend un palier primaire (4.4), et dans lequel les premiers moyens de guidage en translation comprennent une tige filetée (8) agencée en liaison hélicoïdale avec le palier primaire (4.4).
- Appareil orthopédique (1) selon l'une des revendications précédentes, comprenant en outre un actionneur manuel primaire (9) pour déplacer le support (4) en translation, un actionneur manuel secondaire (16) pour déplacer le chariot (6) en translation et un actionneur manuel tertiaire (32) pour déplacer la coulisse (12) en translation.
- Appareil orthopédique (1) selon les revendications 8 et 11, dans lequel l'actionneur manuel secondaire (16) comprend au moins :- un organe de butée secondaire (16.1) adapté pour coopérer avec chaque cran secondaire (14), l'organe de butée secondaire (16.1) étant mobile entre une position de butée, dans laquelle l'organe de butée secondaire (16.1) empêche la translation du chariot (6) par rapport à la coulisse (12), et une position de libération, dans laquelle le chariot (6) peut être déplacé en translation par rapport à la coulisse (12) ;- un organe élastique de rappel secondaire (16.2) agencé pour rappeler l'organe de butée secondaire (16.1) vers sa position de butée ; et- un organe de libération secondaire agencé de façon à placer l'organe de butée secondaire (16.1) dans sa position de libération.
- Appareil orthopédique (1) selon la revendication 9 et selon la revendication 11 ou 12, dans lequel l'actionneur manuel tertiaire (32) comprend au moins :- un organe de butée tertiaire (32.1) adapté pour coopérer avec chaque cran tertiaire, l'organe de butée tertiaire (32.1) étant mobile entre une position de butée, dans laquelle l'organe de butée tertiaire (32.1) empêche la translation de la coulisse (12) par rapport aux troisièmes moyens de guidage en translation, et une position de libération, dans laquelle la coulisse (12) peut être déplacée en translation par rapport aux troisièmes moyens de guidage en translation ;- un organe élastique de rappel tertiaire agencé pour rappeler l'organe de butée tertiaire (32.1) vers sa position de butée ; et- un organe de libération tertiaire agencé de façon à placer l'organe de butée tertiaire (32.1) dans sa position de libération.
- Appareil orthopédique (1) selon l'une des revendications précédentes, dans lequel le support (4) comprend des moyens de rotation (4.3) adaptés pour faire pivoter le pied (5.1) d'un patient en rotation interne (1.5.1) et en rotation externe (E.5.1).
- Appareil orthopédique (1) selon l'une des revendications précédentes, comprenant en outre une béquille (18) destinée à reposer sur un sol (3) lorsque le membre inférieur (7) d'un patient repose sur l'appareil orthopédique (1), la béquille (18) étant liée à la coulisse (12) au moyen d'une liaison pivot (20) d'axe (Y20) perpendiculaire à la direction longitudinale (X6), la liaison pivot (20) étant disposée dans une partie distale de la coulisse (12), de préférence à l'extrémité distale de la coulisse (12).
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR1160012A FR2982145B1 (fr) | 2011-11-04 | 2011-11-04 | Appareil orthopedique pour tenir et positionner un membre inferieur |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2589364A1 true EP2589364A1 (fr) | 2013-05-08 |
| EP2589364B1 EP2589364B1 (fr) | 2015-06-17 |
Family
ID=46982482
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP12188340.9A Active EP2589364B1 (fr) | 2011-11-04 | 2012-10-12 | Appareil orthopédique pour tenir et positionner un membre inférieur |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP2589364B1 (fr) |
| ES (1) | ES2546991T3 (fr) |
| FR (1) | FR2982145B1 (fr) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AT14928U1 (de) * | 2015-04-22 | 2016-08-15 | Implantech Medizintechnik Ges M B H | Vorrichtung zur Positionierung der unteren Gliedmaßen eines Patienten während einer Operation |
| AT520654A1 (de) * | 2015-04-22 | 2019-06-15 | Implantech Medizintechnik Ges M B H | Vorrichtung zur Positionierung der unteren Gliedmaßen eines Patienten während einer Operation |
| US10835440B2 (en) * | 2016-04-01 | 2020-11-17 | Allen Medical Systems, Inc. | Boot carriage for repositioning a surgical boot along a support rod |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5645079A (en) | 1994-12-02 | 1997-07-08 | Zahiri; Hormoz | Apparatus for mechanically holding, maneuvering and maintaining a body part of a patient during orthopedic surgery |
| US6058534A (en) * | 1997-04-04 | 2000-05-09 | Amatech Corporation | Locking-cylinder supported surgical boot |
| WO2007021806A2 (fr) * | 2005-08-10 | 2007-02-22 | Orthopedic Systems, Inc. | Table medicale a mouvements commandes et methode d'utilisation |
| US20100242181A1 (en) * | 2009-03-03 | 2010-09-30 | Bochner Ronnie Z | Bedside medical examination device |
-
2011
- 2011-11-04 FR FR1160012A patent/FR2982145B1/fr active Active
-
2012
- 2012-10-12 EP EP12188340.9A patent/EP2589364B1/fr active Active
- 2012-10-12 ES ES12188340.9T patent/ES2546991T3/es active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5645079A (en) | 1994-12-02 | 1997-07-08 | Zahiri; Hormoz | Apparatus for mechanically holding, maneuvering and maintaining a body part of a patient during orthopedic surgery |
| US6058534A (en) * | 1997-04-04 | 2000-05-09 | Amatech Corporation | Locking-cylinder supported surgical boot |
| WO2007021806A2 (fr) * | 2005-08-10 | 2007-02-22 | Orthopedic Systems, Inc. | Table medicale a mouvements commandes et methode d'utilisation |
| US20100242181A1 (en) * | 2009-03-03 | 2010-09-30 | Bochner Ronnie Z | Bedside medical examination device |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AT14928U1 (de) * | 2015-04-22 | 2016-08-15 | Implantech Medizintechnik Ges M B H | Vorrichtung zur Positionierung der unteren Gliedmaßen eines Patienten während einer Operation |
| AT520654A1 (de) * | 2015-04-22 | 2019-06-15 | Implantech Medizintechnik Ges M B H | Vorrichtung zur Positionierung der unteren Gliedmaßen eines Patienten während einer Operation |
| AT520654B1 (de) * | 2015-04-22 | 2019-11-15 | Implantech Medizintechnik Ges M B H | Vorrichtung zur Positionierung der unteren Gliedmaßen eines Patienten während einer Operation |
| US10835440B2 (en) * | 2016-04-01 | 2020-11-17 | Allen Medical Systems, Inc. | Boot carriage for repositioning a surgical boot along a support rod |
| US11826289B2 (en) | 2016-04-01 | 2023-11-28 | Allen Medical Systems, Inc. | Surgical boot with splined support rod |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2589364B1 (fr) | 2015-06-17 |
| FR2982145A1 (fr) | 2013-05-10 |
| ES2546991T3 (es) | 2015-09-30 |
| FR2982145B1 (fr) | 2013-11-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2462901B1 (fr) | Prothèse pour membre inférieur | |
| FR2757761A1 (fr) | Systeme d'oteosynthese du rachis avec reglage en position | |
| EP0311482A1 (fr) | Table d'opération orthopédique pour membres, et notamment pour membres inférieurs | |
| EP0066028A1 (fr) | Appareillage externe de station verticale et de marche pour handicapés moteurs des membres inférieurs | |
| EP2589364B1 (fr) | Appareil orthopédique pour tenir et positionner un membre inférieur | |
| EP0240430B1 (fr) | Dispositif de traction pour tables d'opérations et appareillages de chirurgie orthopédique | |
| EP4456853B1 (fr) | Dispositif de repose-jambes inclinable pour fauteuil roulant | |
| EP3903756A1 (fr) | Dispositif orthopedique d'aide a la deambulation et pouvant servir a la reeducation de la marche du type comportant des moyens d'ecartement des cuisses du patient | |
| EP3097898B1 (fr) | Fauteuil médicalisé équipé d'un système d'aide aux patients à s'asseoir et se relever | |
| FR2631231A1 (fr) | Appareil pour le maintien de la cuisse, notamment dans le cas d'une intervention sur le genou | |
| FR2679765A1 (fr) | Fixateur externe axial. | |
| CA3167536C (fr) | Exosquelette autorisant une grande liberte de mouvement de l'epaule | |
| BE1026784B1 (fr) | Table elevatrice | |
| EP1121085B1 (fr) | Attelle de mobilisation d'un membre inferieur | |
| EP4166125B1 (fr) | Dispositif orthopédique d'aide à la déambulation comportant des moyens de motorisation et des moyens d'écartement des cuisses du patient | |
| FR3096269A1 (fr) | Appareil de renforcement des ischio-jambiers | |
| FR2827158A1 (fr) | Dispositif de controle du deplacement angulaire de deux parties du corps | |
| EP0274312A2 (fr) | Appareil de rééducation pour la récupération et l'entretien de la mobilité de bassin | |
| EP4137277A1 (fr) | Dispositif d'assistance musculaire | |
| FR3163550A1 (fr) | Dispositif d'aide à la marche pour un individu | |
| FR2834205A1 (fr) | Attelle a course longitudinale reduite pour la mobilisation passive du membre inferieur | |
| FR2868674A1 (fr) | Dispositif mecanique destine a elever une literie, pouvant s'arreter a toutes les positions comprises dans les limites et a l'interieur d'une course definie par un verin electromecanique | |
| FR2675689A1 (fr) | Table chirurgicale veterinaire. | |
| FR3104940A1 (fr) | Articulation de genou actionnée | |
| EP3969131A1 (fr) | Dispositif d'exercices musculaires |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| 17P | Request for examination filed |
Effective date: 20131105 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20150120 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 731492 Country of ref document: AT Kind code of ref document: T Effective date: 20150715 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: FRENCH |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602012008002 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: CABINET GERMAIN AND MAUREAU, CH |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2546991 Country of ref document: ES Kind code of ref document: T3 Effective date: 20150930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150617 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150917 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150617 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150617 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 731492 Country of ref document: AT Kind code of ref document: T Effective date: 20150617 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D Ref country code: NL Ref legal event code: MP Effective date: 20150617 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150918 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150917 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150617 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150617 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150617 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20151017 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20151019 Ref country code: RO Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150617 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150617 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150617 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150617 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150617 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602012008002 Country of ref document: DE |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150617 |
|
| 26N | No opposition filed |
Effective date: 20160318 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150617 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150617 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 5 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20151012 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150617 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20121012 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150617 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150617 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150617 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150617 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 6 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150617 Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150617 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 7 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150617 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20250929 Year of fee payment: 14 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20250929 Year of fee payment: 14 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: U11 Free format text: ST27 STATUS EVENT CODE: U-0-0-U10-U11 (AS PROVIDED BY THE NATIONAL OFFICE) Effective date: 20251101 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: LU Payment date: 20251021 Year of fee payment: 14 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20250929 Year of fee payment: 14 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20251013 Year of fee payment: 14 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: BE Payment date: 20251021 Year of fee payment: 14 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20251101 Year of fee payment: 14 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20260114 Year of fee payment: 14 |