EP2573031A2 - Yarn processing device and yarn winding device - Google Patents
Yarn processing device and yarn winding device Download PDFInfo
- Publication number
- EP2573031A2 EP2573031A2 EP20120171726 EP12171726A EP2573031A2 EP 2573031 A2 EP2573031 A2 EP 2573031A2 EP 20120171726 EP20120171726 EP 20120171726 EP 12171726 A EP12171726 A EP 12171726A EP 2573031 A2 EP2573031 A2 EP 2573031A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- yarn
- section
- processing device
- cam
- plate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H69/00—Methods of, or devices for, interconnecting successive lengths of material; Knot-tying devices ;Control of the correct working of the interconnecting device
- B65H69/06—Methods of, or devices for, interconnecting successive lengths of material; Knot-tying devices ;Control of the correct working of the interconnecting device by splicing
- B65H69/061—Methods of, or devices for, interconnecting successive lengths of material; Knot-tying devices ;Control of the correct working of the interconnecting device by splicing using pneumatic means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2701/00—Handled material; Storage means
- B65H2701/30—Handled filamentary material
- B65H2701/31—Textiles threads or artificial strands of filaments
Definitions
- a yarn processing device of the present invention is a yarn processing device that carries out processing of a yarn, the yarn processing device including an operation mechanism that performs a plurality of operations to carry out the processing; and a transmission mechanism that controls the operation of the operation mechanism; wherein the transmission mechanism includes a plurality of pattern portions corresponding to each of the operations.
- the operation mechanism performs a plurality of operations in accordance with each of the plurality of pattern portions of the transmission mechanism. Therefore, according to the yarn processing device, the plurality of operations can be executed with a simple configuration without requiring a troublesome operation such as replacing a component member in the transmission mechanism.
- the transmission mechanism is a cam mechanism including a rotatable plate-like member; and the plurality of pattern portions are formed along an outer periphery of the plate-like member. According to such a configuration, the plurality of operations can be realized by controlling a rotation of the plate-like member.
- a driving source that drives the transmission mechanism may be further arranged. According to such a configuration, the operation of the transmission mechanism such as switching of the pattern portions and switching of the rotating direction of the plate-like member can be performed by a dedicated driving source without being influenced by a driving situation or the like of other mechanisms.
- the driving source may be a stepping motor. According to such a configuration, the operation of the plate-like member such as the rotation speed, the rotating direction, and the like of the plate-like member can be easily and accurately controlled.
- the yarn processing device may further include a sensor that detects whether or not the pattern portion is at an initial position. According to such a configuration, the position adjustment of the pattern portion can be accurately performed.
- the sensor is a magnetic sensor that detects one polarity; and when the pattern portion is at the initial position, a first magnet having the one polarity is arranged at a position facing the magnetic sensor in the plate-like member, and a second magnet having the other polarity is arranged at a position adjacent to both sides of the first magnet in the plate-like member. According to such a configuration, the magnetic field of one polarity of the first magnet is thus narrowed by the magnetic field of the other polarity of the second magnet, and hence accuracy in detection of one polarity by the magnetic sensor can be enhanced.
- the operation mechanism performs a plurality of operations to carry out processing of joining yarn ends, and includes a yarn cutting mechanism that has the operation controlled by the transmission mechanism to cut the yarn end and a yarn clamping mechanism that has the operation controlled by the yarn cutting mechanism to clamp the yarn end; and an operation timing of the yarn clamping mechanism and the yarn cutting mechanism may be changed for every pattern portion. According to such a configuration, the operation timing of the yarn clamping mechanism and the yarn cutting mechanism are changed according to a yarn type, and the yarn joining operation at the optimum yarn joining condition can be realized.
- the yarn cutting mechanism has a function of cutting the yarn end and a function of clamping the cut yarn end; and a time during which the yarn cutting mechanism clamps the cut yarn end may be changed according to the pattern portion. According to such a configuration, the time during which the yarn cutting mechanism clamps the yarn ends is made long with respect to the yarn having high stretchability, so that the yarn ends are prevented from suddenly contracting and escaping immediately after being cut.
- a yarn winding device of the present invention includes the yarn processing device of the present invention described above, where a yarn supplying section that supports a yarn supplying bobbin, a yarn unwinding assisting section that controls a balloon of the yarn unwound from the yarn supplying bobbin, a tension applying section that applies a predetermined tension on the travelling yarn, a supplying side yarn catching section that guides a yarn end from the supplying side to the yarn processing device, a winding side yarn catching section that guides a yarn end from the winding side to the yarn processing device, a yarn defect detecting section that detects a yarn defect of the travelling yarn, and a winding section that winds the yarn into a package are arranged along a yarn path with the yarn processing device.
- the yarn winding device includes the yarn processing device capable of performing a plurality of operations with a simple configuration, as described above, the yarn processing device can be miniaturized and the height of the device from the yarn supplying section to the winding section can be suppressed.
- the winding section is located on the upper side, for example, attachment/detachment of the package with respect to the winding section can be easily carried out.
- a yarn tension measuring section that measures a tension of the yarn applied by the tension applying section and a yarn travelling state detecting section that detects a state of the travelling yarn may be further arranged along the yarn path. In this case as well, the height of the device from the yarn supplying section to the winding section can be suppressed.
- a plurality of operations can be performed with a simple configuration.
- FIG. 1 is a front view of a winding unit, which is a yarn winding device, according to one embodiment of the present invention
- FIG. 2 is a perspective view of a splicer, which is a yarn processing device of one embodiment of the present invention
- FIG. 3 is a perspective view of the splicer
- FIG. 4 is a perspective view of the splicer
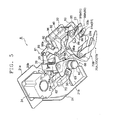
- FIG. 5 is a perspective view of the splicer
- FIG. 6 is a longitudinal cross-sectional view describing a yarn joining operation of the splicer
- FIGS. 7(A) to 7(C) are bottom views describing an operation of an operation mechanism of the splicer
- FIGS. 8(A) to 8(C) are bottom views describing the operation of the operation mechanism of the splicer
- FIGS. 9(A) to 9(C) are bottom views describing the operation of the operation mechanism of the splicer
- FIGS. 10(A) to 10(C) are bottom views describing the operation of the operation mechanism of the splicer
- FIGS. 11(A) to 11(C) are bottom views describing the operation of the operation mechanism of the splicer
- FIGS. 12(A) to 12(C) are bottom views describing the operation of the operation mechanism of the splicer
- FIGS. 13(A) to 13(C) are bottom views describing the operation of the operation mechanism of the splicer
- FIGS. 14(A) to 14(C) are bottom views describing the operation of the operation mechanism of the splicer
- FIGS. 15(A) to 15(C) are bottom views describing the operation of the operation mechanism of the splicer
- FIGS. 16(A) to 16(C) are bottom views describing the operation of the operation mechanism of the splicer
- FIGS. 17(A) to 17(C) are bottom views describing the operation of the operation mechanism of the splicer
- FIGS. 18(A) to 18(C) are bottom views describing the operation of the operation mechanism of the splicer
- FIGS. 19(A) to 19(C) are bottom views describing the operation of the operation mechanism of the splicer
- FIGS. 20(A) to 20(C) are bottom views describing the operation of the operation mechanism of the splicer
- FIGS. 21(A) to 21(C) are bottom views describing the operation of the operation mechanism of the splicer.
- FIGS. 22(A) to 22(C) are bottom views describing the operation of the operation mechanism of the splicer.
- a winding unit (yarn winding device) 1 is a device that winds a yarn Y from a yarn supplying bobbin B into a package P.
- the yarn supplying bobbin B is formed by a fine spinning machine in a pre-step, and is transported from the fine spinning machine while being set in a tray, for example.
- An automatic winder is configured by arranging a plurality of winding units 1 in line.
- the winding unit 1 has a bobbin supporting section (yarn supplying section) 2, a yarn unwinding assisting device (yarn unwinding assisting section) 3, a pre-clearer 4, a gate type tensor (tension applying section) 5, a tension sensor (yarn tension measuring section) 6, a lower yarn catching device (supplying side yarn catching section) 7, a splicer (yarn joining device, yarn processing device) 8, a cutter 9, a yarn clearer (yarn defect detecting section) 11, an upper yarn catching device (winding side yarn catching section) 12, and a winding section 13 arranged in this order from upstream (lower side herein) along a travelling path of the yarn Y (i.e., yarn path).
- the winding unit 1 also includes a control section 15 that controls each configuration of the winding unit 1, and a display (display section) 16 that displays operation situations and the like of the winding unit 1.
- the control section 15 transmits and receives various information related to the winding operation with a control device that controls the entire automatic winder.
- the bobbin supporting section 2 supports the yarn supplying bobbin B in an upright state.
- the yarn unwinding assisting device 3 controls a balloon of the yarn Y unwound from the yarn supplying bobbin B by a tubular member arranged above the yarn supplying bobbin B.
- the gate type tensor 5 applies a predetermined tension on the travelling yarn Y by holding the yarn Y in a zigzag form with a pair of gates including a fixed gate and a movable gate of comb teeth shape.
- the tension sensor 6 measures the tension of the yarn Y applied by the gate type tensor 5.
- the pre-clearer 4 regulates in advance the passing of the yarn defect greater than a defined value by a pair of regulating members arranged at a predetermined interval with a yarn path therebetween.
- the yarn clearer 11 detects the yarn defect such as slub during the winding of the yarn Y.
- the cutter 9 cuts the yarn Y after the pre-clearer 4 regulates the passing of the yarn defect or after the yarn clearer 11 detects the yarn defect.
- the splicer 8 joins the yarn end from the yarn supplying bobbin B and the yarn end from the package P (yarn ends) when the yarn Y is cut by the cutter 9 or when the yarn Y is disconnected.
- the lower yarn catching device 7 is configured to be vertically swingable with an axis line ⁇ as a center, where a suction port 7a is arranged at the swinging end thereof.
- the suction port 7a is swung between an upper part of the splicer 8 and a lower part of the pre-clearer 4.
- the upper yarn catching device 12 is configured to be vertically swingable with an axis center ⁇ as a center, where a suction port 12a is arranged at the swinging end thereof.
- the suction port 12a is swung between a lower part of the splicer 8 and the winding section 13.
- the lower yarn catching device 7 waits at a position swung in a downward direction to suck the yarn end from the yarn supplying bobbin B with the suction port 7a, and thereafter, swung in an upward direction to guide the yarn end from the yarn supplying bobbin B to the splicer 8.
- the upper yarn catching device 12 is swung in an upward direction to suck the yarn end from the package P with the suction port 12a, and thereafter, swung in a downward direction to guide the yarn end from the package P to the splicer 8.
- the winding section 13 winds the yarn Y unwound from the yarn supplying bobbin B into the package P to form a fully-wound package P.
- the winding section 13 includes a winding drum 17 provided with a drum groove 17a, and a cradle 18 that rotatably supports the package P.
- the cradle 18 makes the surface of the package P to contact with the surface of the winding drum 17 with an appropriate contact pressure.
- the winding drum 17 is driven and rotated by a motor to rotate the package P, whereby the winding section 13 winds the yarn Y into the package P while traversing the yarn Y at a predetermined width.
- the splicer 8 will be described in more detail below.
- the yarn supplying bobbin B side (supplying side) is the lower side
- the package P side (winding side) is the upper side
- the yarn path side with respect to the splicer 8 is the front side
- the opposite side thereof is the back side.
- the splicer 8 includes a frame body 21, an untwisting section 40 attached to the front side of the frame body 21, and a yarn joining section 50 attached to the front side of the untwisting section 40.
- the splicer 8 is attached to the machine 14 by way of the frame body 21.
- Guide plates 22, 23 are attached to the upper side and the lower side, respectively, of the untwisting section 40 so as to face each other with the yarn joining section 50 therebetween.
- the guide plate 22 is provided with a guide groove 22a into which the yarn end from the package P is introduced, and a guide groove 22b into which the yarn end from the yarn supplying bobbin B is introduced.
- the guide plate 23 is provided with a guide groove 23a into which the yarn end from the package P is introduced, and a guide groove 23b into which the yarn end from the yarn supplying bobbin B is introduced.
- the guide plate 22 includes a clamp section 91 that clamps the yarn end from the package P introduced into the guide groove 22a, and the guide plate 23 includes a cutter section 87 that cuts the yarn end from the package P introduced into the guide groove 23a. Furthermore, the guide plate 23 includes the clamp section 91 that clamps the yarn end from the yarn supplying bobbin B introduced into the guide groove 23b, and the guide plate 22 includes the cutter section 87 that cuts the yarn end from the yarn supplying bobbin B introduced into the guide groove 22b.
- the untwisting section 40 untwists the yarn end from the package P and the yarn end from the yarn supplying bobbin B cut by the cutter section 87 while being clamped by the clamp section 91.
- the yarn joining section 50 twists the yarn end from the package P and the yarn end from the yarn supplying bobbin B untwisted by the untwisting section 40.
- the splicer 8 further includes a stepping motor (driving source) 24, a cam mechanism (transmission mechanism) 60 driven by the stepping motor 24, an operation mechanism (first operation mechanism) 70 and an operation mechanism (second operation mechanism) 80, which operations are controlled by the cam mechanism 60, and a single torsion coil spring (urging member, first urging member) 25 that urges one part of the operation mechanism 70, 80 to make contact with the cam mechanism 60.
- the operation mechanism 70 includes a yarn guiding mechanism 70A that guides the yarn end, a twist preventing mechanism 70B that holds the yarn ends when twisting the yarn ends, and a joint length adjusting mechanism 70C that adjusts the length of the joint of the yarn ends.
- the operation mechanism 80 includes a yarn clamping mechanism 80A that clamps the yarn end, and a yarn cutting mechanism 80B that cuts the yarn end.
- the stepping motor 24 is fixed to an upper plate 21a with a rotation shaft 24a thereof projecting out from the upper plate 21a of the frame body 21.
- the cam mechanism 60 includes a single cam shaft 61 rotatably bridged between the upper plate 21a and a lower plate 21b of the frame body 21, a cam (first cam, plate-like member) 62 fixed to the cam shaft 61 in proximity to the upper plate 21a, and a cam (second cam, plate-like member) 63 fixed to the cam shaft 61 in proximity to the lower plate 21b.
- Timing pulleys 26, 27 are fixed to the rotation shaft 24a of the stepping motor 24 and an upper end portion 61a of the cam shaft 61 projecting out from the upper plate 21a of the frame body 21, respectively, where a timing belt 28 is bridged between the timing pulleys 26, 27.
- the cam shaft 61 and the cams 62, 63 are thus integrally rotated by the stepping motor 24.
- a single supporting shaft (first supporting shaft) 29 is bridged between the upper plate 21a and the lower plate 21b of the frame body 21 so as to be substantially parallel with the cam shaft 61.
- the supporting shaft 29 is attached, in a swingable manner, with a cam follower section (first cam follower section) 71 of the operation mechanism 70, and a cam follower section (second cam follower section, cutter operation transmitting section) 81 of the operation mechanism 80.
- the cam follower section 71 is a plate-like member rotatably attached to the supporting shaft 29 in proximity to the upper plate 21a of the frame body 21.
- the cam follower section 71 is provided with an arm 71a, where a cam follower (first cam follower) 72 is rotatably attached to a lower surface of an intermediate portion of the arm 71a.
- the cam follower section 81 includes an upper plate 82 rotatably attached to the supporting shaft 29 in proximity to the cam follower section 71, a lower plate 83 rotatably attached to the supporting shaft 29 in proximity to the lower plate 21b of the frame body 21, and a connecting plate 84 for connecting the upper plate 82 and the lower plate 83.
- the upper plate 82, the lower plate 83, and the connecting plate 84 are integrally formed.
- the lower plate 83 is provided with a pair of arms 83a, 83b, and a cam follower (second cam follower) 85 is rotatably attached to an upper surface of a distal end portion of the arm 83b.
- the upper plate 82 is provided with an arm 82a so as to overlap the arm 83a when seen from a center line direction of the supporting shaft 29.
- the torsion coil spring 25 is rotatably attached to the supporting shaft 29 between the upper plate 82 and the lower plate 83 of the cam follower section 81.
- One end 25a of the torsion coil spring 25 is hooked at the intermediate portion of the arm 71a of the cam follower section 71, and the other end 25b of the torsion coil spring 25 is hooked at the connecting plate 84 of the cam follower section 81.
- the cam follower 72 and the cam follower 85 are urged in opposite rotation directions (i.e., to sandwich the cam shaft 61) with each other with respect to the supporting shaft 29 (i.e., about the center line of the supporting shaft 29) by the torsion coil spring 25.
- a back end of a long coupling member 73 is rotatably coupled to the distal end portion of the arm 71a of the cam follower section 71.
- a yarn guiding lever body 74 is rotatably coupled to a front end of the coupling member 73.
- the yarn guiding lever body 74 includes a supporting shaft 75 rotatably attached to the untwisting section 40 so as to be substantially parallel to the supporting shaft 29, and yarn guiding levers 74a, 74b respectively fixed to the upper end and the lower end of the supporting shaft 75.
- a yarn guiding mechanism 70A and a joint length adjusting mechanism 70C are configured including the cam follower section 71, the coupling member 73, and the yarn guiding lever body 74 described above.
- a twist preventing lever body 76 is rotatably attached to the supporting shaft 75 of the yarn guiding lever body 74.
- the twist preventing lever body 76 includes a bracket 76c rotatably attached to the supporting shaft 75, and twist preventing levers 76a, 76b extending from an upper end and a lower end, respectively, of the bracket 76c.
- a torsion coil spring 77 that urges the twist preventing lever body 76 towards the yarn guiding lever body 74 is rotatably attached to the supporting shaft 75. The twist preventing lever body 76 is thus swung towards the untwisting section 40 with the yarn guiding lever body 74.
- a twist preventing mechanism 70B is configured including the cam follower section 71, the coupling member 73, and the twist preventing lever body 76 described above.
- a back end of a long coupling member (cutter operation transmitting section) 86 provided with a bent portion 86a is rotatably coupled to the distal end portion of the arm 82a of the cam follower section 81.
- the cutter section 87 that cuts the yarn end from the yarn supplying bobbin B is coupled in a freely rotating manner to a front end of the coupling member 86.
- the cutter section 87 includes a fixed piece 87a fixed to a lower surface of the guide plate 22 and a movable piece 87b rotatably attached to the lower surface of the guide plate 22.
- the fixed piece 87a and the movable piece 87b form a pair with the guide groove 22b therebetween.
- the front end of the coupling member 86 is rotatably coupled to an arm 87c extending from a basal end potion of the movable piece 87b.
- the back end of the long coupling member 86 provided with the bent portion 86a is rotatably coupled to the distal end portion of the arm 83a of the cam follower section 81.
- the cutter section 87 that cuts the yarn end from the package P is coupled in a freely rotating manner to the front end of the coupling member 86.
- the cutter section 87 includes a fixed piece 87a fixed to an upper surface of the guide plate 23 and a movable piece 87b rotatably attached to the upper surface of the guide plate 23.
- the fixed piece 87a and the movable piece 87b form a pair with the guide groove 23a therebetween.
- the front end of the coupling member 86 is rotatably coupled to the arm 87c extending from the basal end portion of the movable piece 87b.
- a yarn cutting mechanism 80B having the operation controlled by the cam mechanism 60 is configured including the cam follower section 81, the coupling member 86, and the cutter section 87 described above.
- the yarn cutting mechanism 80B includes the cutter section 87 that cuts the yarn ends from the package P and the yarn supplying bobbin B, and the cam follower section 81 and the coupling member 86 that transmits the operation from the cam mechanism 60 to the cutter section 87.
- a supporting shaft (second supporting shaft) 88 is fixed to the upper surface of the guide plate 22.
- An intermediate portion of a long coupling member (clamp operation transmitting section) 89 is rotatably attached to the supporting shaft 88.
- the clamp section 91 that clamps the yarn end from the package P is arranged at the front end of the coupling member 89.
- the clamp section 91 includes a fixed piece 91a fixed to an upper surface of the guide plate 22 and a movable piece 91b formed at the front end of the coupling member 89.
- the fixed piece 91a and the movable piece 91b form a pair with the guide groove 22a therebetween.
- a circular plate-like member (clamp operation transmitting section) 92 that makes contact with the coupling member 86 is rotatably attached to the back end of the coupling member 89.
- a torsion coil spring (second urging member) 93 is rotatably attached to the supporting shaft 88 fixed to the upper surface of the guide plate 22.
- the torsion coil spring 93 urges the circular plate-like member 92 to make contact with the bent portion 86a of the coupling member 86.
- the torsion coil spring 93 urges the movable piece 91b to make contact with the fixed piece 91a.
- the bent portion 86a thus has a function of a cam that transmits the operation to the clamp section 91 via the circular plate-like member 92.
- the clamp section 91 When the circular plate-like member 92 is moved by the coupling member 86 and the coupling member 89 is rotated, the clamp section 91 performs the operation of releasing the clamping of the yarn end from the package P against the urging force of the torsion coil spring 93.
- the supporting shaft 88 is fixed to the lower surface of the guide plate 23, and an intermediate portion of the long coupling member 89 is rotatably attached to the supporting shaft 88.
- the clamp section 91 that clamps the yarn end from the yarn supplying bobbin B is arranged at the front end of the coupling member 89.
- the clamp section 91 includes the fixed piece 91a fixed to the lower surface of the guide plate 23 and the movable piece 91b formed at the front end of the coupling member 89.
- the fixed piece 91a and the movable piece 91b form a pair with the guide groove 23b therebetween.
- the circular plate-like member 92 that makes contact with the coupling member 86 is rotatably attached to the back end of the coupling member 89.
- the torsion coil spring 93 is rotatably attached to the supporting shaft 88 fixed to the lower surface of the guide plate 23.
- the torsion coil spring 93 urges the circular plate-like member 92 to make contact with the bent portion 86a of the coupling member 86.
- the torsion coil spring 93 urges the movable piece 91b to make contact with the fixed piece 91a.
- the bent portion 86a thus has a function of a cam that transmits the operation to the clamp section 91 via the circular plate-like member 92.
- the clamp section 91 When the circular plate-like member 92 is moved by the coupling member 86 and the coupling member 89 is rotated, the clamp section 91 performs the operation of releasing the clamping of the yarn end from the yarn supplying bobbin B against the urging force of the torsion coil spring 93.
- a yarn clamping mechanism 80A having the operation controlled by the yarn cutting mechanism 80B is configured including the coupling member 89, the circular plate-like member 92, and the clamp section 91 described above.
- the yarn clamping mechanism 80A includes the clamp section 91 that clamps the yarn end from the package P and the yarn end from the yarn supplying bobbin B, and the coupling member 89 and the circular plate-like member 92 that transmits the operation from the coupling member 86 of the yarn cutting mechanism 80B to the clamp section 91.
- the yarn joining operation of the splicer 8 configured as above will be described.
- a yarn end YB from the yarn supplying bobbin B guided by the lower yarn catching device 7 and a yarn end YP from the package P guided by the upper yarn catching device 12 are guided towards the untwisting section 40.
- the yarn end YB is thereby introduced into the guide groove 23b of the guide plate 23, the guide groove 22b of the guide plate 22, and the yarn joining nozzle 51 of the yarn joining section 50.
- the yarn end YP is introduced into the guide groove 22a of the guide plate 22, the guide groove 23a of the guide plate 23, and the yarn joining nozzle 51 of the yarn joining section 50.
- the yarn guiding levers 74a, 74b function as a yarn guiding mechanism 70A in this case.
- the yarn ends YB, YP are arranged in an accommodating section 52 through a guide inclined section 53 when being introduced into the yarn joining nozzle 51.
- the yarn end YB introduced into the guide groove 23b of the guide plate 23 is then clamped by the clamp section 91 in proximity to the guide groove 23b.
- the yarn end YP introduced into the guide groove 22a of the guide plate 22 is clamped by the clamp section 91 in proximity to the guide groove 22a.
- the yarn end YB introduced into the guide groove 22b of the guide plate 22 is cut with the cutter section 87 in proximity to the guide groove 22b.
- the yarn end YP introduced into the guide groove 23a of the guide plate 23 is cut with the cutter section 87 in proximity to the guide groove 23a.
- the cutting length of the yarn ends YB, YP is determined by the position where the turning of the yarn guiding levers 74a, 74b is stopped.
- the distal end portion of the cut yarn end YB is sucked through a suction port 41a into an untwisting nozzle 41 of the untwisting section 40, and untwisted by untwisting air ejected from an ejection hole 42 into the untwisting nozzle 41.
- the distal end portion of the cut yarn end YP is sucked through a suction port 43a into an untwisting nozzle 43 of the untwisting section 40, and untwisted by untwisting air ejected from an ejection hole 44 into the untwisting nozzle 43.
- the distal end portions of the untwisted yarn ends YB, YP are pulled out from the untwisting nozzles 41, 43.
- the distal end portions of the untwisted yarn ends YB, YP are held in proximity to the yarn joining section 50 by the twist preventing levers 76a, 76b turned with the yarn guiding levers 74a, 74b.
- the twist preventing levers 76a, 76b are stopped when making contact with the stopper 40a.
- the distal end portions of the untwisted yarn ends YB, YP are thereby twisted by yarn joining air ejected from an ejection hole 54 into the accommodating section 52.
- the length of the joint of the yarn ends YB, YP is determined by the position to stop the further swinging of the yarn guiding levers 74a, 74b.
- the yarn guiding levers 74a, 74b function as a joint length adjusting mechanism 70C.
- FIG. 7(A) to FIG. 22(C) Figure (A) illustrates the operations of the yarn guiding mechanism 70A, the twist preventing mechanism 70B, and the joint length adjusting mechanism 70C, Figure (B) illustrates the operation of the yarn clamping mechanism 80A, and Figure (C) illustrates the operation of the yarn cutting mechanism 808.
- the cam 62 is provided with a pattern portion 62a so as to lie along an outer periphery on one side of a plane passing through an initial position 62i and a center line CL of the cam shaft 61, and a pattern portion 62b so as to lie along an outer periphery on the other side of the plane.
- two patterns of the pattern portions 62a, 62b are formed in a range of greater than or equal to 0 degrees and less than 180 degrees and a range of greater than or equal to 180 degrees and less than 360 degrees, respectively, with respect to the center of rotation of the cam 62.
- Each pattern portion 62a, 62b corresponds to each of a plurality of processes performed by the splicer 8 (more specifically, a plurality of operations performed by the operation mechanism 70).
- the cam 63 is provided with a pattern portion 63a so as to lie along an outer periphery on one side of a plane passing through an initial position 63i and the center line CL of the cam shaft 61, and a pattern portion 63b so as to lie along an outer periphery on the other side of the plane.
- two patterns of the pattern portions 63a, 63b are formed in a range of greater than or equal to 0 degrees and less than 180 degrees and a range of greater than or equal to 180 degrees and less than 360 degrees, respectively, with respect to the center of rotation of the cam 63.
- Each pattern portion 63a, 63b corresponds to each of a plurality of processes performed by the splicer 8 (more specifically, a plurality of operations performed by the operation mechanism 80).
- the cam follower 72 makes contact with the initial position 62i of the cam 62, and the cam follower 85 makes contact with the initial position 63i of the cam 63.
- a magnet (first magnet) 31 embedded in the cam 63 faces a magnetic sensor (sensor) 30 installed on the lower plate 21b of the frame body 21 of the splicer 8 (see FIG. 5 ).
- the magnetic sensor 30 detects the polarity (one polarity) of the magnet 31.
- a magnet (second magnet) embedded in the cam 63 so as to be adjacent to both sides of the magnet 31 in the rotating direction of the cam 63 has a polarity (other polarity) opposite to the magnet 31. Detection is thus made that each pattern portion 62a, 62b is at the initial position 62i and each pattern portion 63a, 63b is at the initial position 63i.
- the operation of the operation mechanism 70 is controlled by the pattern portion 62a of the cam 62 and the operation of the operation mechanism 80 is controlled by the pattern portion 63a of the cam 63.
- the torsion angle ⁇ of the torsion coil spring 25 takes a maximum value.
- the yarn end YB from the yarn supplying bobbin B is introduced into the guide groove 23b of the guide plate 23, the guide groove 22b of the guide plate 22, and the yarn joining nozzle 51 of the yarn joining section 50.
- the yarn end YP from the package P is introduced into the guide groove 22a of the guide plate 22, the guide groove 23a of the guide plate 23, and the yarn joining nozzle 51 of the yarn joining section 50.
- the cam shaft 61 and the cams 62, 63 are gradually rotated 105 degrees and 135 degrees from the initial state. Meanwhile, the distal end portions of the cut yarn ends YB, YP are untwisted in the untwisting section 40.
- the cutter section 87 meanwhile remains closed, but since the cutter section 87 in this case does not include the clamping mechanism, the distal end portions of the cut yarn ends YB, YP become free immediately after the cutter section 87 is closed.
- the distal end portions of the untwisted yarn ends YB, YP are pulled out from the untwisting nozzles 41, 43 by the further turning of the yarn guiding levers 74a, 74b.
- the distal end portions of the untwisted yarn ends YB, YP are twisted in the yarn joining section 50 while being held by the twist preventing levers 76a, 76b.
- the length of the joint of the yarn ends YB, YP is determined by the position to stop the further turning of the yarn guiding levers 74a, 74b.
- the cam shaft 61 and the cams 62, 63 are rotated about 75 degrees to cut the yarn ends YB, YP, and then rotated about 105 degrees until the cutter section 87 including the clamping mechanism is opened to release the clamping of the yarn ends YB, YP by the cutter section 87, so that the yarn ends YB, YP are prevented from contracting suddenly and the yarn ends YB, YP are released after the untwisting nozzles 41, 43 are activated to be prepared to suck the yarn.
- the yarn ends YB, YP can be reliably sucked into the untwisting nozzles 41, 43 of the untwisting section 40.
- the bent portion 86a of the coupling member 86 is separated from the circular plate-like member 92, and hence the clamping of the yarn ends YB, YP by the clamp section 91 is maintained. Furthermore, as illustrated in FIGS. 21(A) to 21(C) , the cam shaft 61 and the cams 62, 63 are gradually rotated to 135 degrees from the initial state. Meanwhile, the distal end portions of the cut yarn ends YB, YP are untwisted in the untwisting section 40.
- the operation mechanism 70 performs different operations according to each pattern portion 62a, 62b of the cam 62 of the cam mechanism 60
- the operation mechanism 80 performs different operations according to each pattern portion 63a, 63b of the cam 63 of the cam mechanism 60. Therefore, according to the splicer 8, a plurality of operations can be performed with a simple configuration without requiring a troublesome operation such as replacing the cams 62, 63 in the cam mechanism 60.
- the winding unit 1 includes the splicer 8 capable of performing a plurality of operations with a simple structure, as described above.
- the splicer 8 can be miniaturized and the height of the winding unit 1 from the bobbin supporting section 2 to the winding section 13 can be suppressed.
- the attachment/detachment or the like of the package P with respect to the winding section 13 located on the upper side can be easily carried out.
- a motor in which a forward/reverse rotation control can be made such as the DC motor may be used as the driving source.
- the magnet 31 to be detected by the magnetic sensor 30 is not limited to being embedded in the cam 61, and may be embedded in the coupling member for coupling the cam 63 and the operating section, and the like. Furthermore, as long as whether or not the pattern portion is at the initial position can be detected, other sensors such as a light projecting and receiving sensor in which a hole, a slit, or the like is formed in the cam, and a photo sensor in which a reflection plate is attached may be used in place of the magnetic sensor 30.
- the winding unit 1 may include a yarn travelling state detecting section that detects the state of the travelling yarn Y such as the travelling speed and the feeding length of the yarn Y.
Landscapes
- Spinning Or Twisting Of Yarns (AREA)
- Tension Adjustment In Filamentary Materials (AREA)
- Yarns And Mechanical Finishing Of Yarns Or Ropes (AREA)
Abstract
Description
- The present invention relates to a yarn processing device such as a yarn joining device that joins yarn ends, for example, and a yarn winding device including the yarn processing device.
- Conventionally, there is known a yarn winding device that winds a yarn from a yarn supplying bobbin into a package. Such a yarn winding device is mounted with a yarn joining device that joins a yarn end from the yarn supplying bobbin and a yarn end from the package when the yarn is cut to remove a yarn defect, for example, as one of the yarn processing devices (see e.g., Japanese Unexamined Utility Model Publication No.
4-42169 64-26742 - However, in the conventional yarn joining device, a cam of a cam mechanism for controlling the operation is replaced to enable different yarn joining operations. Alternatively, the control of an electromagnetic actuator arranged in place of the cam mechanism needs to be changed.
- It is an object of the present invention to provide a yarn processing device capable of performing a plurality of operations with a simple configuration, and a yarn winding device including such a yarn processing device.
- A yarn processing device of the present invention is a yarn processing device that carries out processing of a yarn, the yarn processing device including an operation mechanism that performs a plurality of operations to carry out the processing; and a transmission mechanism that controls the operation of the operation mechanism; wherein the transmission mechanism includes a plurality of pattern portions corresponding to each of the operations.
- In the yarn processing device, the operation mechanism performs a plurality of operations in accordance with each of the plurality of pattern portions of the transmission mechanism. Therefore, according to the yarn processing device, the plurality of operations can be executed with a simple configuration without requiring a troublesome operation such as replacing a component member in the transmission mechanism.
- The transmission mechanism is a cam mechanism including a rotatable plate-like member; and the plurality of pattern portions are formed along an outer periphery of the plate-like member. According to such a configuration, the plurality of operations can be realized by controlling a rotation of the plate-like member.
- Two patterns of the pattern portion may be formed in a range of greater than or equal to 0 degrees and less than 180 degrees and a range of greater than or equal to 180 degrees and less than 360 degrees, respectively, with respect to a center of rotation of the plate-like member. According to such a configuration, two types of operations can be easily realized by controlling the rotation of the plate-like member.
- A driving source that drives the transmission mechanism may be further arranged. According to such a configuration, the operation of the transmission mechanism such as switching of the pattern portions and switching of the rotating direction of the plate-like member can be performed by a dedicated driving source without being influenced by a driving situation or the like of other mechanisms.
- The driving source may be a stepping motor. According to such a configuration, the operation of the plate-like member such as the rotation speed, the rotating direction, and the like of the plate-like member can be easily and accurately controlled.
- The yarn processing device may further include a sensor that detects whether or not the pattern portion is at an initial position. According to such a configuration, the position adjustment of the pattern portion can be accurately performed.
- The sensor is a magnetic sensor that detects one polarity; and when the pattern portion is at the initial position, a first magnet having the one polarity is arranged at a position facing the magnetic sensor in the plate-like member, and a second magnet having the other polarity is arranged at a position adjacent to both sides of the first magnet in the plate-like member. According to such a configuration, the magnetic field of one polarity of the first magnet is thus narrowed by the magnetic field of the other polarity of the second magnet, and hence accuracy in detection of one polarity by the magnetic sensor can be enhanced.
- The operation mechanism performs a plurality of operations to carry out processing of joining yarn ends, and includes a yarn cutting mechanism that has the operation controlled by the transmission mechanism to cut the yarn end and a yarn clamping mechanism that has the operation controlled by the yarn cutting mechanism to clamp the yarn end; and an operation timing of the yarn clamping mechanism and the yarn cutting mechanism may be changed for every pattern portion. According to such a configuration, the operation timing of the yarn clamping mechanism and the yarn cutting mechanism are changed according to a yarn type, and the yarn joining operation at the optimum yarn joining condition can be realized.
- The yarn cutting mechanism has a function of cutting the yarn end and a function of clamping the cut yarn end; and a time during which the yarn cutting mechanism clamps the cut yarn end may be changed according to the pattern portion. According to such a configuration, the time during which the yarn cutting mechanism clamps the yarn ends is made long with respect to the yarn having high stretchability, so that the yarn ends are prevented from suddenly contracting and escaping immediately after being cut.
- A yarn winding device of the present invention includes the yarn processing device of the present invention described above, where a yarn supplying section that supports a yarn supplying bobbin, a yarn unwinding assisting section that controls a balloon of the yarn unwound from the yarn supplying bobbin, a tension applying section that applies a predetermined tension on the travelling yarn, a supplying side yarn catching section that guides a yarn end from the supplying side to the yarn processing device, a winding side yarn catching section that guides a yarn end from the winding side to the yarn processing device, a yarn defect detecting section that detects a yarn defect of the travelling yarn, and a winding section that winds the yarn into a package are arranged along a yarn path with the yarn processing device.
- Since the yarn winding device includes the yarn processing device capable of performing a plurality of operations with a simple configuration, as described above, the yarn processing device can be miniaturized and the height of the device from the yarn supplying section to the winding section can be suppressed. Thus, if the winding section is located on the upper side, for example, attachment/detachment of the package with respect to the winding section can be easily carried out.
- A yarn tension measuring section that measures a tension of the yarn applied by the tension applying section and a yarn travelling state detecting section that detects a state of the travelling yarn may be further arranged along the yarn path. In this case as well, the height of the device from the yarn supplying section to the winding section can be suppressed.
- According to the present invention, a plurality of operations can be performed with a simple configuration.
-
FIG. 1 is a front view of a winding unit, which is a yarn winding device, according to one embodiment of the present invention; -
FIG. 2 is a perspective view of a splicer, which is a yarn processing device of one embodiment of the present invention; -
FIG. 3 is a perspective view of the splicer; -
FIG. 4 is a perspective view of the splicer; -
FIG. 5 is a perspective view of the splicer; -
FIG. 6 is a longitudinal cross-sectional view describing a yarn joining operation of the splicer; -
FIGS. 7(A) to 7(C) are bottom views describing an operation of an operation mechanism of the splicer; -
FIGS. 8(A) to 8(C) are bottom views describing the operation of the operation mechanism of the splicer; -
FIGS. 9(A) to 9(C) are bottom views describing the operation of the operation mechanism of the splicer; -
FIGS. 10(A) to 10(C) are bottom views describing the operation of the operation mechanism of the splicer; -
FIGS. 11(A) to 11(C) are bottom views describing the operation of the operation mechanism of the splicer; -
FIGS. 12(A) to 12(C) are bottom views describing the operation of the operation mechanism of the splicer; -
FIGS. 13(A) to 13(C) are bottom views describing the operation of the operation mechanism of the splicer; -
FIGS. 14(A) to 14(C) are bottom views describing the operation of the operation mechanism of the splicer; -
FIGS. 15(A) to 15(C) are bottom views describing the operation of the operation mechanism of the splicer; -
FIGS. 16(A) to 16(C) are bottom views describing the operation of the operation mechanism of the splicer; -
FIGS. 17(A) to 17(C) are bottom views describing the operation of the operation mechanism of the splicer; -
FIGS. 18(A) to 18(C) are bottom views describing the operation of the operation mechanism of the splicer; -
FIGS. 19(A) to 19(C) are bottom views describing the operation of the operation mechanism of the splicer; -
FIGS. 20(A) to 20(C) are bottom views describing the operation of the operation mechanism of the splicer; -
FIGS. 21(A) to 21(C) are bottom views describing the operation of the operation mechanism of the splicer; and -
FIGS. 22(A) to 22(C) are bottom views describing the operation of the operation mechanism of the splicer. - A preferred embodiment of the present invention will be hereinafter described in detail with reference to the drawings. In each figure, the same reference numerals are denoted for the same or corresponding portions, and descriptions thereof will not be repeated.
- As illustrated in
FIG. 1 , a winding unit (yarn winding device) 1 is a device that winds a yarn Y from a yarn supplying bobbin B into a package P. The yarn supplying bobbin B is formed by a fine spinning machine in a pre-step, and is transported from the fine spinning machine while being set in a tray, for example. An automatic winder is configured by arranging a plurality of windingunits 1 in line. - The winding
unit 1 has a bobbin supporting section (yarn supplying section) 2, a yarn unwinding assisting device (yarn unwinding assisting section) 3, a pre-clearer 4, a gate type tensor (tension applying section) 5, a tension sensor (yarn tension measuring section) 6, a lower yarn catching device (supplying side yarn catching section) 7, a splicer (yarn joining device, yarn processing device) 8, acutter 9, a yarn clearer (yarn defect detecting section) 11, an upper yarn catching device (winding side yarn catching section) 12, and a windingsection 13 arranged in this order from upstream (lower side herein) along a travelling path of the yarn Y (i.e., yarn path). Each of the above configurations is attached to amachine 14. The windingunit 1 also includes acontrol section 15 that controls each configuration of the windingunit 1, and a display (display section) 16 that displays operation situations and the like of the windingunit 1. Thecontrol section 15 transmits and receives various information related to the winding operation with a control device that controls the entire automatic winder. - The
bobbin supporting section 2 supports the yarn supplying bobbin B in an upright state. The yarnunwinding assisting device 3 controls a balloon of the yarn Y unwound from the yarn supplying bobbin B by a tubular member arranged above the yarn supplying bobbin B. Thegate type tensor 5 applies a predetermined tension on the travelling yarn Y by holding the yarn Y in a zigzag form with a pair of gates including a fixed gate and a movable gate of comb teeth shape. Thetension sensor 6 measures the tension of the yarn Y applied by thegate type tensor 5. - The pre-clearer 4 regulates in advance the passing of the yarn defect greater than a defined value by a pair of regulating members arranged at a predetermined interval with a yarn path therebetween. The
yarn clearer 11 detects the yarn defect such as slub during the winding of the yarn Y. Thecutter 9 cuts the yarn Y after the pre-clearer 4 regulates the passing of the yarn defect or after theyarn clearer 11 detects the yarn defect. Thesplicer 8 joins the yarn end from the yarn supplying bobbin B and the yarn end from the package P (yarn ends) when the yarn Y is cut by thecutter 9 or when the yarn Y is disconnected. - The lower
yarn catching device 7 is configured to be vertically swingable with an axis line α as a center, where asuction port 7a is arranged at the swinging end thereof. Thesuction port 7a is swung between an upper part of thesplicer 8 and a lower part of the pre-clearer 4. The upperyarn catching device 12 is configured to be vertically swingable with an axis center β as a center, where asuction port 12a is arranged at the swinging end thereof. Thesuction port 12a is swung between a lower part of thesplicer 8 and the windingsection 13. Accordingly, the loweryarn catching device 7 waits at a position swung in a downward direction to suck the yarn end from the yarn supplying bobbin B with thesuction port 7a, and thereafter, swung in an upward direction to guide the yarn end from the yarn supplying bobbin B to thesplicer 8. On the other hand, the upperyarn catching device 12 is swung in an upward direction to suck the yarn end from the package P with thesuction port 12a, and thereafter, swung in a downward direction to guide the yarn end from the package P to thesplicer 8. - The winding
section 13 winds the yarn Y unwound from the yarn supplying bobbin B into the package P to form a fully-wound package P. The windingsection 13 includes a windingdrum 17 provided with adrum groove 17a, and acradle 18 that rotatably supports the package P. Thecradle 18 makes the surface of the package P to contact with the surface of the windingdrum 17 with an appropriate contact pressure. The windingdrum 17 is driven and rotated by a motor to rotate the package P, whereby the windingsection 13 winds the yarn Y into the package P while traversing the yarn Y at a predetermined width. - The
splicer 8 will be described in more detail below. In the following description, for the sake of convenience, the yarn supplying bobbin B side (supplying side) is the lower side, the package P side (winding side) is the upper side, the yarn path side with respect to thesplicer 8 is the front side, and the opposite side thereof is the back side. - As illustrated in
FIG. 2 andFIG. 3 , thesplicer 8 includes aframe body 21, an untwistingsection 40 attached to the front side of theframe body 21, and ayarn joining section 50 attached to the front side of the untwistingsection 40. Thesplicer 8 is attached to themachine 14 by way of theframe body 21.Guide plates section 40 so as to face each other with theyarn joining section 50 therebetween. Theguide plate 22 is provided with aguide groove 22a into which the yarn end from the package P is introduced, and aguide groove 22b into which the yarn end from the yarn supplying bobbin B is introduced. Similarly, theguide plate 23 is provided with aguide groove 23a into which the yarn end from the package P is introduced, and aguide groove 23b into which the yarn end from the yarn supplying bobbin B is introduced. - The
guide plate 22 includes aclamp section 91 that clamps the yarn end from the package P introduced into theguide groove 22a, and theguide plate 23 includes acutter section 87 that cuts the yarn end from the package P introduced into theguide groove 23a. Furthermore, theguide plate 23 includes theclamp section 91 that clamps the yarn end from the yarn supplying bobbin B introduced into theguide groove 23b, and theguide plate 22 includes thecutter section 87 that cuts the yarn end from the yarn supplying bobbin B introduced into theguide groove 22b. The untwistingsection 40 untwists the yarn end from the package P and the yarn end from the yarn supplying bobbin B cut by thecutter section 87 while being clamped by theclamp section 91. Theyarn joining section 50 twists the yarn end from the package P and the yarn end from the yarn supplying bobbin B untwisted by the untwistingsection 40. - As illustrated in
FIG. 4 andFIG. 5 , thesplicer 8 further includes a stepping motor (driving source) 24, a cam mechanism (transmission mechanism) 60 driven by the steppingmotor 24, an operation mechanism (first operation mechanism) 70 and an operation mechanism (second operation mechanism) 80, which operations are controlled by thecam mechanism 60, and a single torsion coil spring (urging member, first urging member) 25 that urges one part of theoperation mechanism cam mechanism 60. Theoperation mechanism 70 includes ayarn guiding mechanism 70A that guides the yarn end, atwist preventing mechanism 70B that holds the yarn ends when twisting the yarn ends, and a jointlength adjusting mechanism 70C that adjusts the length of the joint of the yarn ends. Theoperation mechanism 80 includes ayarn clamping mechanism 80A that clamps the yarn end, and ayarn cutting mechanism 80B that cuts the yarn end. - The stepping
motor 24 is fixed to anupper plate 21a with arotation shaft 24a thereof projecting out from theupper plate 21a of theframe body 21. Thecam mechanism 60 includes asingle cam shaft 61 rotatably bridged between theupper plate 21a and alower plate 21b of theframe body 21, a cam (first cam, plate-like member) 62 fixed to thecam shaft 61 in proximity to theupper plate 21a, and a cam (second cam, plate-like member) 63 fixed to thecam shaft 61 in proximity to thelower plate 21b. Timing pulleys 26, 27 are fixed to therotation shaft 24a of the steppingmotor 24 and anupper end portion 61a of thecam shaft 61 projecting out from theupper plate 21a of theframe body 21, respectively, where atiming belt 28 is bridged between the timing pulleys 26, 27. Thecam shaft 61 and thecams motor 24. - A single supporting shaft (first supporting shaft) 29 is bridged between the
upper plate 21a and thelower plate 21b of theframe body 21 so as to be substantially parallel with thecam shaft 61. The supportingshaft 29 is attached, in a swingable manner, with a cam follower section (first cam follower section) 71 of theoperation mechanism 70, and a cam follower section (second cam follower section, cutter operation transmitting section) 81 of theoperation mechanism 80. - As illustrated in
FIG. 5 , thecam follower section 71 is a plate-like member rotatably attached to the supportingshaft 29 in proximity to theupper plate 21a of theframe body 21. Thecam follower section 71 is provided with anarm 71a, where a cam follower (first cam follower) 72 is rotatably attached to a lower surface of an intermediate portion of thearm 71a. - As illustrated in
FIG. 4 , thecam follower section 81 includes anupper plate 82 rotatably attached to the supportingshaft 29 in proximity to thecam follower section 71, alower plate 83 rotatably attached to the supportingshaft 29 in proximity to thelower plate 21b of theframe body 21, and a connectingplate 84 for connecting theupper plate 82 and thelower plate 83. Theupper plate 82, thelower plate 83, and the connectingplate 84 are integrally formed. Thelower plate 83 is provided with a pair ofarms arm 83b. On the other hand, theupper plate 82 is provided with an arm 82a so as to overlap thearm 83a when seen from a center line direction of the supportingshaft 29. - As illustrated in
FIG. 4 andFIG. 5 , thetorsion coil spring 25 is rotatably attached to the supportingshaft 29 between theupper plate 82 and thelower plate 83 of thecam follower section 81. Oneend 25a of thetorsion coil spring 25 is hooked at the intermediate portion of thearm 71a of thecam follower section 71, and theother end 25b of thetorsion coil spring 25 is hooked at the connectingplate 84 of thecam follower section 81. By this singletorsion coil spring 25, thecam follower 72 of thecam follower section 71 is urged to make contact with thecam 62 of thecam mechanism 60, and thecam follower 85 of thecam follower section 81 is urged to make contact with thecam 63 of thecam mechanism 60. That is, thecam follower 72 and thecam follower 85 are urged in opposite rotation directions (i.e., to sandwich the cam shaft 61) with each other with respect to the supporting shaft 29 (i.e., about the center line of the supporting shaft 29) by thetorsion coil spring 25. - As illustrated in
FIG. 5 , a back end of along coupling member 73 is rotatably coupled to the distal end portion of thearm 71a of thecam follower section 71. As illustrated inFIG. 2 andFIG. 3 , a yarn guidinglever body 74 is rotatably coupled to a front end of thecoupling member 73. The yarn guidinglever body 74 includes a supportingshaft 75 rotatably attached to the untwistingsection 40 so as to be substantially parallel to the supportingshaft 29, andyarn guiding levers shaft 75. The front end of thecoupling member 73 is rotatably coupled to thearm 74c extending from the basal end portion of theyarn guiding lever 74a on the upper side. Ayarn guiding mechanism 70A and a jointlength adjusting mechanism 70C are configured including thecam follower section 71, thecoupling member 73, and the yarn guidinglever body 74 described above. - A twist preventing
lever body 76 is rotatably attached to the supportingshaft 75 of the yarn guidinglever body 74. The twist preventinglever body 76 includes abracket 76c rotatably attached to the supportingshaft 75, andtwist preventing levers bracket 76c. Furthermore, atorsion coil spring 77 that urges the twist preventinglever body 76 towards the yarn guidinglever body 74 is rotatably attached to the supportingshaft 75. The twist preventinglever body 76 is thus swung towards the untwistingsection 40 with the yarn guidinglever body 74. However, after aprotrusion 76d arranged on thebracket 76c makes contact with astopper 40a arranged on the untwistingsection 40, only the yarn guidinglever body 74 is swung towards the untwistingsection 40. Atwist preventing mechanism 70B is configured including thecam follower section 71, thecoupling member 73, and the twist preventinglever body 76 described above. - As illustrated in
FIG. 4 andFIG. 5 , a back end of a long coupling member (cutter operation transmitting section) 86 provided with abent portion 86a is rotatably coupled to the distal end portion of the arm 82a of thecam follower section 81. Thecutter section 87 that cuts the yarn end from the yarn supplying bobbin B is coupled in a freely rotating manner to a front end of thecoupling member 86. As illustrated inFIG. 3 , thecutter section 87 includes a fixedpiece 87a fixed to a lower surface of theguide plate 22 and amovable piece 87b rotatably attached to the lower surface of theguide plate 22. The fixedpiece 87a and themovable piece 87b form a pair with theguide groove 22b therebetween. As illustrated inFIG. 4 , the front end of thecoupling member 86 is rotatably coupled to anarm 87c extending from a basal end potion of themovable piece 87b. - Similarly, the back end of the
long coupling member 86 provided with thebent portion 86a is rotatably coupled to the distal end portion of thearm 83a of thecam follower section 81. Thecutter section 87 that cuts the yarn end from the package P is coupled in a freely rotating manner to the front end of thecoupling member 86. Thecutter section 87 includes a fixedpiece 87a fixed to an upper surface of theguide plate 23 and amovable piece 87b rotatably attached to the upper surface of theguide plate 23. The fixedpiece 87a and themovable piece 87b form a pair with theguide groove 23a therebetween. The front end of thecoupling member 86 is rotatably coupled to thearm 87c extending from the basal end portion of themovable piece 87b. - A
yarn cutting mechanism 80B having the operation controlled by thecam mechanism 60 is configured including thecam follower section 81, thecoupling member 86, and thecutter section 87 described above. Thus, theyarn cutting mechanism 80B includes thecutter section 87 that cuts the yarn ends from the package P and the yarn supplying bobbin B, and thecam follower section 81 and thecoupling member 86 that transmits the operation from thecam mechanism 60 to thecutter section 87. - Furthermore, as illustrated in
FIG. 2 andFIG. 4 , a supporting shaft (second supporting shaft) 88 is fixed to the upper surface of theguide plate 22. An intermediate portion of a long coupling member (clamp operation transmitting section) 89 is rotatably attached to the supportingshaft 88. Theclamp section 91 that clamps the yarn end from the package P is arranged at the front end of thecoupling member 89. Theclamp section 91 includes a fixedpiece 91a fixed to an upper surface of theguide plate 22 and amovable piece 91b formed at the front end of thecoupling member 89. The fixedpiece 91a and themovable piece 91b form a pair with theguide groove 22a therebetween. A circular plate-like member (clamp operation transmitting section) 92 that makes contact with thecoupling member 86 is rotatably attached to the back end of thecoupling member 89. - A torsion coil spring (second urging member) 93 is rotatably attached to the supporting
shaft 88 fixed to the upper surface of theguide plate 22. Thetorsion coil spring 93 urges the circular plate-like member 92 to make contact with thebent portion 86a of thecoupling member 86. Thetorsion coil spring 93 urges themovable piece 91b to make contact with the fixedpiece 91a. Thebent portion 86a thus has a function of a cam that transmits the operation to theclamp section 91 via the circular plate-like member 92. When the circular plate-like member 92 is moved by thecoupling member 86 and thecoupling member 89 is rotated, theclamp section 91 performs the operation of releasing the clamping of the yarn end from the package P against the urging force of thetorsion coil spring 93. - Similarly, the supporting
shaft 88 is fixed to the lower surface of theguide plate 23, and an intermediate portion of thelong coupling member 89 is rotatably attached to the supportingshaft 88. Theclamp section 91 that clamps the yarn end from the yarn supplying bobbin B is arranged at the front end of thecoupling member 89. Theclamp section 91 includes the fixedpiece 91a fixed to the lower surface of theguide plate 23 and themovable piece 91b formed at the front end of thecoupling member 89. The fixedpiece 91a and themovable piece 91b form a pair with theguide groove 23b therebetween. The circular plate-like member 92 that makes contact with thecoupling member 86 is rotatably attached to the back end of thecoupling member 89. - The
torsion coil spring 93 is rotatably attached to the supportingshaft 88 fixed to the lower surface of theguide plate 23. Thetorsion coil spring 93 urges the circular plate-like member 92 to make contact with thebent portion 86a of thecoupling member 86. Thetorsion coil spring 93 urges themovable piece 91b to make contact with the fixedpiece 91a. Thebent portion 86a thus has a function of a cam that transmits the operation to theclamp section 91 via the circular plate-like member 92. When the circular plate-like member 92 is moved by thecoupling member 86 and thecoupling member 89 is rotated, theclamp section 91 performs the operation of releasing the clamping of the yarn end from the yarn supplying bobbin B against the urging force of thetorsion coil spring 93. - A
yarn clamping mechanism 80A having the operation controlled by theyarn cutting mechanism 80B is configured including thecoupling member 89, the circular plate-like member 92, and theclamp section 91 described above. Thus, theyarn clamping mechanism 80A includes theclamp section 91 that clamps the yarn end from the package P and the yarn end from the yarn supplying bobbin B, and thecoupling member 89 and the circular plate-like member 92 that transmits the operation from thecoupling member 86 of theyarn cutting mechanism 80B to theclamp section 91. - The yarn joining operation of the
splicer 8 configured as above will be described. As illustrated inFIG. 6 , when theyarn guiding levers section 40, a yarn end YB from the yarn supplying bobbin B guided by the loweryarn catching device 7 and a yarn end YP from the package P guided by the upperyarn catching device 12 are guided towards the untwistingsection 40. The yarn end YB is thereby introduced into theguide groove 23b of theguide plate 23, theguide groove 22b of theguide plate 22, and theyarn joining nozzle 51 of theyarn joining section 50. Similarly, the yarn end YP is introduced into theguide groove 22a of theguide plate 22, theguide groove 23a of theguide plate 23, and theyarn joining nozzle 51 of theyarn joining section 50. Theyarn guiding levers yarn guiding mechanism 70A in this case. The yarn ends YB, YP are arranged in anaccommodating section 52 through a guideinclined section 53 when being introduced into theyarn joining nozzle 51. - The yarn end YB introduced into the
guide groove 23b of theguide plate 23 is then clamped by theclamp section 91 in proximity to theguide groove 23b. Similarly, the yarn end YP introduced into theguide groove 22a of theguide plate 22 is clamped by theclamp section 91 in proximity to theguide groove 22a. Then, the yarn end YB introduced into theguide groove 22b of theguide plate 22 is cut with thecutter section 87 in proximity to theguide groove 22b. Similarly, the yarn end YP introduced into theguide groove 23a of theguide plate 23 is cut with thecutter section 87 in proximity to theguide groove 23a. In this case, the cutting length of the yarn ends YB, YP is determined by the position where the turning of theyarn guiding levers - The distal end portion of the cut yarn end YB is sucked through a
suction port 41a into an untwistingnozzle 41 of the untwistingsection 40, and untwisted by untwisting air ejected from anejection hole 42 into the untwistingnozzle 41. Similarly, the distal end portion of the cut yarn end YP is sucked through asuction port 43a into an untwistingnozzle 43 of the untwistingsection 40, and untwisted by untwisting air ejected from anejection hole 44 into the untwistingnozzle 43. - When the
yarn guiding levers section 40, the distal end portions of the untwisted yarn ends YB, YP are pulled out from the untwistingnozzles yarn joining section 50 by thetwist preventing levers yarn guiding levers twist preventing levers stopper 40a. The distal end portions of the untwisted yarn ends YB, YP are thereby twisted by yarn joining air ejected from anejection hole 54 into theaccommodating section 52. In this case, the length of the joint of the yarn ends YB, YP is determined by the position to stop the further swinging of theyarn guiding levers yarn guiding levers length adjusting mechanism 70C. - Then, the
yarn guiding levers twist preventing levers clamp section 91 releases the clamping. The joined yarn end YB and the yarn end YP (i.e., the yarn Y) thereby return on the yarn path on the front side of thesplicer 8. - The
yarn guiding mechanism 70A, thetwist preventing mechanism 70B, the jointlength adjusting mechanism 70C, theyarn clamping mechanism 80A, and ayarn cutting mechanism 80B will be more specifically described below. InFIG. 7(A) to FIG. 22(C) , Figure (A) illustrates the operations of theyarn guiding mechanism 70A, thetwist preventing mechanism 70B, and the jointlength adjusting mechanism 70C, Figure (B) illustrates the operation of theyarn clamping mechanism 80A, and Figure (C) illustrates the operation of the yarn cutting mechanism 808. - As illustrated in
FIGS. 7(A) to 7(C) , thecam 62 is provided with apattern portion 62a so as to lie along an outer periphery on one side of a plane passing through aninitial position 62i and a center line CL of thecam shaft 61, and apattern portion 62b so as to lie along an outer periphery on the other side of the plane. In other words, two patterns of thepattern portions cam 62. Eachpattern portion - The
cam 63 is provided with apattern portion 63a so as to lie along an outer periphery on one side of a plane passing through aninitial position 63i and the center line CL of thecam shaft 61, and apattern portion 63b so as to lie along an outer periphery on the other side of the plane. In other words, two patterns of thepattern portions cam 63. Eachpattern portion - At the start of each operation, the
cam follower 72 makes contact with theinitial position 62i of thecam 62, and thecam follower 85 makes contact with theinitial position 63i of thecam 63. In this case (i.e., when eachpattern portion initial position 62i and eachpattern portion initial position 63i), a magnet (first magnet) 31 embedded in thecam 63 faces a magnetic sensor (sensor) 30 installed on thelower plate 21b of theframe body 21 of the splicer 8 (seeFIG. 5 ). Themagnetic sensor 30 detects the polarity (one polarity) of themagnet 31. A magnet (second magnet) embedded in thecam 63 so as to be adjacent to both sides of themagnet 31 in the rotating direction of thecam 63 has a polarity (other polarity) opposite to themagnet 31. Detection is thus made that eachpattern portion initial position 62i and eachpattern portion initial position 63i. - When the stepping
motor 24 is rotated in one direction from the initial state and thecam shaft 61 and thecams operation mechanism 70 is controlled by thepattern portion 62a of thecam 62 and the operation of theoperation mechanism 80 is controlled by thepattern portion 63a of thecam 63. As illustrated inFIGS. 8(A) to 8(C) , when thecam shaft 61 and thecams torsion coil spring 25 takes a maximum value. - Furthermore, as illustrated in
FIGS. 9(A) to 9(C) , when thecam shaft 61 and thecams coupling member 73 is moved in the direction of an arrow A11 through thecam follower section 71, and theyarn guiding levers twist preventing levers FIG. 9(A) ). In this case, the torsion angle θ of thetorsion coil spring 25 takes a minimum value. According to the turning of theyarn guiding levers guide groove 23b of theguide plate 23, theguide groove 22b of theguide plate 22, and theyarn joining nozzle 51 of theyarn joining section 50. Similarly, the yarn end YP from the package P is introduced into theguide groove 22a of theguide plate 22, theguide groove 23a of theguide plate 23, and theyarn joining nozzle 51 of theyarn joining section 50. - Furthermore, as illustrated in
FIGS. 10(A) to 10(C) , when thecam shaft 61 and thecams coupling member 86 is moved in the direction of an arrow A13 through the cam follower section 81 (seeFIG. 10(B) ). When thebent portion 86a of thecoupling member 86 is separated from the circular plate-like member 92, thecoupling member 89 is urged by thetorsion coil spring 93 and themovable piece 91b of theclamp section 91 is rotated in the closing direction with the supportingshaft 88 as the center. The yarn ends YB, YP are thereby clamped. Furthermore, as illustrated inFIGS. 11(A) to 11(C) , when thecam shaft 61 and thecams coupling member 86 is moved in the direction of an arrow A13 through thecam follower section 81 and themovable piece 87b of thecutter section 87 is rotated in the closing direction with the supportingshaft 95 arranged on theguide plate FIG. 11(C) ). The yarn ends YB, YP are thereby cut. In this case, the cutting length of the yarn ends YB, YP is determined by the position to stop the turning of theyarn guiding levers - Furthermore, as illustrated in
FIGS. 12(A) to 12(C) andFIGS.13(A) to 13(C) , thecam shaft 61 and thecams section 40. Thecutter section 87 meanwhile remains closed, but since thecutter section 87 in this case does not include the clamping mechanism, the distal end portions of the cut yarn ends YB, YP become free immediately after thecutter section 87 is closed. - As illustrated in
FIGS. 13(A) to 13(C) andFIGS. 14(A) to 14(C) , while thecam shaft 61 and thecams coupling member 73 is further moved in the direction of the arrow A11 through thecam follower section 71 and theyarn guiding levers twist preventing levers FIG. 13(A) andFIG.14(A) ). However, thetwist preventing levers stopper 40a. The distal end portions of the untwisted yarn ends YB, YP are pulled out from the untwistingnozzles yarn guiding levers yarn joining section 50 while being held by thetwist preventing levers yarn guiding levers - The operations described above are reversely carried out until the stepping
motor 24 is rotated in the other direction, and thecam shaft 61 and thecams pattern portion 62a is at theinitial position 62i and thepattern portion 63a is at theinitial position 63i). That is, theyarn guiding levers twist preventing levers clamp section 91 releases the clamping. The joint yarn end YB and the yarn end YP (i.e., the yarn Y) thus return to the yarn path on the front side of thesplicer 8. - As illustrated in
FIGS. 15(A) to 15(C) , when the steppingmotor 24 is rotated in the other direction from the initial state, and thecam shaft 61 and thecams operation mechanism 70 is controlled by thepattern section 62b of thecam 62 and the operation of theoperation mechanism 80 is controlled by thepattern portion 63b of thecam 63. As illustrated inFIGS.16(A) to 16(C) , when thecam shaft 61 and thecams torsion coil spring 25 takes a maximum value. - Furthermore, as illustrated in
FIGS. 17(A) to 17(C) , when thecam shaft 61 and thecams coupling member 73 is moved in the direction of the arrow All through thecam follower section 71, and theyarn guiding levers twist preventing levers FIG. 17 (A) ). In this case, the torsion angle θ of thetorsion coil spring 25 takes a minimum value. According to the turning of theyarn guiding levers guide groove 23b of theguide plate 23, theguide groove 22b of theguide plate 22, and theyarn joining nozzle 51 of theyarn joining section 50. Similarly, the yarn end YP from the package P is introduced into theguide groove 22a of theguide plate 22, theguide groove 23a of theguide plate 23, and theyarn joining nozzle 51 of theyarn joining section 50. - Furthermore, as illustrated in
FIGS. 18(A) to 18(C) , when thecam shaft 61 and thecams coupling member 86 is moved in the direction of the arrow A13 through the cam follower section 81 (seeFIG. 18(B) ). When thebent portion 86a of thecoupling member 86 is separated from the circular plate-like member 92, thecoupling member 89 is urged by thetorsion coil spring 93 and themovable piece 91b of theclamp section 91 is rotated in the closing direction with the supportingshaft 88 as the center. The yarn ends YB, YP are thereby clamped. Furthermore, as illustrated inFIGS. 19(A) to 19(C) , when thecam shaft 61 and thecams coupling member 86 is further moved in the direction of the arrow A13 through thecam follower section 81 and themovable piece 87b of thecutter section 87 is rotated in the closing direction with the supportingshaft 95 as the center (seeFIG. 19(C) ). The yarn ends YB, YP are thereby cut. In this case, the cutting length of the yarn ends YB, YP is determined by the position to stop the turning of theyarn guiding levers - Furthermore, as illustrated in
FIGS. 20(A) to 20(C) , when thecam shaft 61 and thecams coupling member 86 is moved in the direction of an arrow A14 through thecam follower section 81 and themovable piece 87b of thecutter section 87 is rotated in the opening direction with the supportingshaft 95 as the center (seeFIG. 20(C) ). The operation of thecutter section 87 is performed when thecutter section 87 itself includes the clamping mechanism that clamps the cut yarn ends YB, YP. Thus, for example, if the yarn Y has excellent stretchability, thecam shaft 61 and thecams cutter section 87 including the clamping mechanism is opened to release the clamping of the yarn ends YB, YP by thecutter section 87, so that the yarn ends YB, YP are prevented from contracting suddenly and the yarn ends YB, YP are released after the untwistingnozzles nozzles section 40. In this case as well, thebent portion 86a of thecoupling member 86 is separated from the circular plate-like member 92, and hence the clamping of the yarn ends YB, YP by theclamp section 91 is maintained. Furthermore, as illustrated inFIGS. 21(A) to 21(C) , thecam shaft 61 and thecams section 40. - Furthermore, as illustrated in
FIGS. 21(A) to 21(C) andFIGS. 22(A) to 22(C) , while thecam shaft 61 and thecams coupling member 73 is further moved in the direction of the arrow A11 through thecam follower section 71 and theyarn guiding levers twist preventing lever FIG. 22 (A) ). Thetwist preventing levers stopper 40a. The distal end portions of the untwisted yarn ends YB, YP are pulled out from the untwistingnozzles yarn guiding levers yarn joining section 50 while being held by thetwist preventing levers yarn guiding levers - The operations described above are reversely performed until the stepping
motor 24 is rotated in one direction, and thecam shaft 61 and thecams pattern portion 62b is at theinitial position 62i and thepattern portion 63b is at theinitial position 63i). That is, theyarn guiding levers twist preventing levers clamp section 91 releases the clamping. The joint yarn end YB and the yarn end YP (i.e., the yarn Y) thus return to the yarn path on the front side of thesplicer 8. - As described above, in the
splicer 8, theoperation mechanism 70 performs different operations according to eachpattern portion cam 62 of thecam mechanism 60, and theoperation mechanism 80 performs different operations according to eachpattern portion cam 63 of thecam mechanism 60. Therefore, according to thesplicer 8, a plurality of operations can be performed with a simple configuration without requiring a troublesome operation such as replacing thecams cam mechanism 60. - The
pattern portions cam 62, and thepattern portions cam 63, and hence a plurality of operations can be realized by controlling the rotation of thecams pattern portions cam 62, and thepattern portions cam 63. Two types of operations thus can be easily realized by controlling the rotation of thecams - Since a
dedicated stepping motor 24 for driving thecam mechanism 60 is arranged, the operation of thecam mechanism 60 such as the switching of thepattern portions cam cam motor 24. - The position adjustment of the
pattern portions magnetic sensor 30 that detects whether or not thepattern portions initial position 62i (63i) is arranged. Furthermore, when thepattern portion initial position 62i (63i), themagnet 31 having one polarity is arranged at a position facing themagnetic sensor 30 in thecam 63 and themagnet 32 having the other polarity is arranged at the position adjacent to both sides of themagnet 31 in thecam 63. The magnetic field of one polarity of themagnet 31 is thus narrowed by the magnetic field of the other polarity of themagnet 32, and hence the accuracy in detection of one polarity by themagnetic sensor 30 can be enhanced. - The
yarn clamping mechanism 80A has the operation controlled by thecam mechanism 60 to clamp the yarn ends YB, YP, and theyarn cutting mechanism 80B has the operation controlled by theyarn clamping mechanism 80A to cut the yarn ends YB, YP. As described in the first operation and the second operation, the operation timing of theyarn clamping mechanism 80A and theyarn cutting mechanism 80B are changed for everypattern portions cam 63 of thecam mechanism 60. The operation timing of theyarn clamping mechanism 80A and theyarn cutting mechanism 80B are thus changed according to the yarn type, so that the yarn joining operation at the optimum yarn joining condition can be realized. - If the
cutter section 87 of theyarn cutting mechanism 80B has the function of clamping the cut yarn ends YB, YP in addition to the function of cutting the yarn ends YB, YP, the time during which thecutter section 87 clamps the cut yarn ends YB, YP can be changed by thepattern portion 63b of thecam 63 of thecam mechanism 60. Thus, the time during which thecutter section 87 clamps the yarn ends YB, YP is made long with respect to the yarn Y having high stretchability, so that the yarn ends YB, YP are prevented from contracting suddenly immediately after being cut and escaping from the untwistingsection 40. - The winding
unit 1 includes thesplicer 8 capable of performing a plurality of operations with a simple structure, as described above. Thus, even if a number of configurations are arranged along the yarn path with thesplicer 8, such as thebobbin supporting section 2, the yarnunwinding assisting device 3, the pre-clearer 4, thegate type tensor 5, thetension sensor 6, the loweryarn catching device 7, thesplicer 8, thecutter 9, theyarn clearer 11, the upperyarn catching device 12, and the windingsection 13, thesplicer 8 can be miniaturized and the height of the windingunit 1 from thebobbin supporting section 2 to the windingsection 13 can be suppressed. Thus, the attachment/detachment or the like of the package P with respect to the windingsection 13 located on the upper side can be easily carried out. - One embodiment of the present invention has been described above, but the present invention is not limited to the embodiment described above. For example, the above embodiment describes a case in which the
splicer 8 is applied to the windingunit 1 of the automatic winder, but the present invention is not limited thereto, and the yarn processing device of the present invention corresponding to thesplicer 8 may be applied to the winding device including the spinning device, or may be applied to an operation cart configured to be able to move among the plurality of winding units. - The operation mechanism is not limited to performing a plurality of operations to carry out processing of joining the yarn ends YB, YP and may perform a plurality of operations according to the type of the yarn supplying bobbin B, and the like in a peg for supporting the yarn supplying bobbin B, a magazine section for holding the plurality of yarn supplying bobbins B and sequentially supplying the yarn supplying bobbin B, and the like. That is, the present invention is applicable not only to the yarn joining device such as the
splicer 8, but also to various yarn processing devices for performing the processing of the yarn. - The pattern portion of each
cam cam mechanism 60 is not limited to thecam cam mechanism 60 using thecams - In place of the stepping
motor 24, a motor in which a forward/reverse rotation control can be made such as the DC motor may be used as the driving source. Themagnet 31 to be detected by themagnetic sensor 30 is not limited to being embedded in thecam 61, and may be embedded in the coupling member for coupling thecam 63 and the operating section, and the like. Furthermore, as long as whether or not the pattern portion is at the initial position can be detected, other sensors such as a light projecting and receiving sensor in which a hole, a slit, or the like is formed in the cam, and a photo sensor in which a reflection plate is attached may be used in place of themagnetic sensor 30. The windingunit 1 may include a yarn travelling state detecting section that detects the state of the travelling yarn Y such as the travelling speed and the feeding length of the yarn Y.
Claims (17)
- A yarn processing device (8) that carries out processing of a yarn, comprising:an operation mechanism (70, 80) that performs a plurality of operations to carry out the processing; anda transmission mechanism (60) that controls the operation of the operation mechanism (70, 80);characterized in that
the transmission mechanism (60) includes a plurality of pattern portions (62a, 62b, 63a, 63b) corresponding to each of the operations. - The yarn processing device (8) according to claim 1,
characterized in that
the transmission mechanism (60) is a cam mechanism including a rotatable plate-like member (62, 63); and
the plurality of pattern portions (62a, 62b, 63a, 63b) are formed along an outer periphery of the plate-like member (62, 63). - The yarn processing device (8) according to claim 2,
characterized in that
two patterns of the pattern portion (62a, 62b, 63a, 63b) are formed in a range of greater than or equal to 0 degrees and less than 180 degrees and a range of greater than or equal to 180 degrees and less than 360 degrees, respectively, with respect to a center of rotation of the plate-like member (62, 63). - The yarn processing device (8) according to any one of claims 1 to 3, characterized by further comprising a driving source (24) that drives the transmission mechanism (60).
- The yarn processing device (8) according to claim 4, characterized in that the driving source (24) is a stepping motor.
- The yarn processing device (8) according to any one of claims1 to 5, characterized by further comprising a sensor (30) that detects whether or not the pattern portion (62a, 62b, 63a, 63b) is at an initial position.
- The yarn processing device (8) according to claim 6,
characterized in that
the sensor (30) is a magnetic sensor that detects one polarity; and
when the pattern portion (62a, 62b, 63a, 63b) is at the initial position, a first magnet (31) is arranged at a position having the one polarity facing the magnetic sensor in the plate-like member (62, 63), and a second magnet (32) having an other polarity is arranged at positions adjacent to both sides of the first magnet (31) in the plate-like member (62, 63). - The yarn processing device (8) according to any one of claims 1 to 7,
characterized in that
the operation mechanism (70, 80) performs a plurality of operations to carry out processing of joining yarn ends, and includes a yarn cutting mechanism (80B) that has the operation controlled by the transmission mechanism (60) to cut the yarn end, and a yarn clamping mechanism (80A) that has the operation controlled by the yarn cutting mechanism (80B) to clamp the yarn end; and
an operation timing of the yarn cutting mechanism (80B) and the yarn clamping mechanism (80A) is changed for every pattern portion (62a, 62b, 63a, 63b). - The yarn processing device (8) according to claim 8, characterized in that
the yarn cutting mechanism (80B) has a function of cutting the yarn end and a function of clamping the cut yarn end; and
a time during which the yarn cutting mechanism (80B) clamps the cut yarn end is changed according to the pattern portion (62a, 62b, 63a, 63b). - A yarn winding device (1) characterized by comprising the yarn processing device (8) according to claim 8 or 9, wherein
a yarn supplying section (2) that supports a yarn supplying bobbin, a yarn unwinding assisting section (3) that controls a balloon of the yarn unwound from the yarn supplying bobbin, a tension applying section (5) that applies a predetermined tension on the travelling yarn, a supplying side yarn catching section (7) that guides a yarn end from the supplying side to the yarn processing device (8), a winding side yarn catching section (12) that guides a yarn end from the winding side to the yarn processing device (8), a yarn defect detecting section (11) that detects a yarn defect of the travelling yarn, and a winding section (13) that winds the yarn into a package are arranged along a yarn path within the yarn processing device (8). - The yarn winding device (1) according to claim 10, characterized in that a yarn tens ion measuring section (6) that measures a tension of the yarn applied by the tension applying section (5) and a yarn travelling state detecting section that detects a state of the travelling yarn are further arranged along the yarn path.
- Method for processing of a yarn by performing a plurality of operations
characterized in that
the plurality of operations is realized by controlling the rotation of a plate-like member, the outer periphery of which is carrying a plurality of pattern portions in accordance with each of the plurality of operations. - Method according to claim 12,
characterized in that
an operation is performed by switching of the pattern portions and switching of the rotation direction of the plate-like member. - Method according to one of the preceding method-claims,
characterized in that
an operation is performed by controlling the rotation speed of the plate-like member. - Method according to one of the preceding method-claims,
characterized in that
the position adjustment of the pattern portion can performed by detecting the initial position of the pattern portion. - Method according to one of the preceding method-claims,
characterized in that
the detecting of the initial position of the pattern portion is made by a magnetic sensor detecting the magnetic field of the first magnet positioned in the plate-like member, and especially the magnetic field of said first magnet is narrowed by the magnetic field of a second magnet. - Method according to one of the preceding method-claims,
characterized in that
the plurality of operations contains yarn cutting and yarn clamping, and the operation timing of the yarn clamping and yarn cutting are changed according to the yarn type using the pattern portions.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011206334A JP2013067465A (en) | 2011-09-21 | 2011-09-21 | Yarn processing device and yarn winding device |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP2573031A2 true EP2573031A2 (en) | 2013-03-27 |
| EP2573031A3 EP2573031A3 (en) | 2014-01-22 |
| EP2573031B1 EP2573031B1 (en) | 2016-04-06 |
Family
ID=46317191
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP12171726.8A Not-in-force EP2573031B1 (en) | 2011-09-21 | 2012-06-13 | Yarn processing device and yarn winding device |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP2573031B1 (en) |
| JP (1) | JP2013067465A (en) |
| CN (1) | CN103010845A (en) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014234311A (en) * | 2013-06-05 | 2014-12-15 | 村田機械株式会社 | Yarn splicing device, winding unit, textile machine and yarn splicing method |
| JP2014234310A (en) * | 2013-06-05 | 2014-12-15 | 村田機械株式会社 | Yarn splicing device, winding unit, textile machine and yarn splicing method |
| DE102017129582A1 (en) * | 2017-12-12 | 2019-06-13 | Saurer Spinning Solutions Gmbh & Co. Kg | Yarn splicing device for a textile machine |
| CN112125063A (en) * | 2020-09-28 | 2020-12-25 | 安徽日发纺织机械有限公司 | Pneumatic splicing device with single-spindle yarn suction nozzle and splicing method thereof |
| CN112125064A (en) * | 2020-09-28 | 2020-12-25 | 安徽日发纺织机械有限公司 | Pneumatic splicing device and splicing method thereof |
| CN112938620B (en) * | 2021-04-20 | 2024-07-19 | 南宁恒启联源机械技术有限责任公司 | Novel double-end winding device and application method thereof |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6426742A (en) | 1987-07-21 | 1989-01-30 | Murata Machinery Ltd | Ending method in spinning frame |
| JPH0442169U (en) | 1990-08-09 | 1992-04-09 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE2615829A1 (en) * | 1975-04-16 | 1976-10-28 | Manea S N C Costruzioni Meccan | DEVICE FOR THE FORMATION OF WEB EDGE IN FABRIC |
| JPS61146827A (en) * | 1984-12-17 | 1986-07-04 | Murata Mach Ltd | Automatic inspection device of yarn ending apparatus |
| IT1218130B (en) * | 1987-05-25 | 1990-04-12 | Manea Cost Mecc | CIMOSSATRICE FOR THE FORMATION OF A CIMOSSA RETURNED TO HALLERY AND WITH REDUCED THICKNESS IN FABRICS PRODUCED ON FRAMES WITHOUT SHUTTLE |
| JPH0791707B2 (en) * | 1987-07-21 | 1995-10-04 | 村田機械株式会社 | Yarn splicing method and device in spinning device |
| JP2610533B2 (en) * | 1990-02-14 | 1997-05-14 | 株式会社島精機製作所 | Knit and transfer cam |
| IT1239713B (en) * | 1990-04-20 | 1993-11-15 | Cem Italia | SHEARING MACHINE PERFECTED FOR THE FORMATION OF A CIMOSSA WITHIN A FABRIC PRODUCED ON A FRAME WITHOUT SHUTTLE |
| DE4139892C2 (en) * | 1991-12-04 | 2001-04-19 | Schlafhorst & Co W | Process for producing a thread connection at a winding point of a winding machine |
| IT1275947B1 (en) * | 1995-03-21 | 1997-10-24 | Mesdan Spa | APPARATUS FOR THE PNEUMATIC JOINING OF THREADS OR YARNS TO BE INSTALLED ON TEXTILE MACHINES IN PARTICULAR ON WINDING MACHINES |
| WO1998042608A1 (en) * | 1997-03-20 | 1998-10-01 | Pentwyn Splicers Ltd. | Pneumatic yarn splicer |
| ITMI981316A1 (en) * | 1998-06-10 | 1999-12-10 | Mesdan Spa | EQUIPMENT FOR THE PNEUMATIC JOINT OF WIRES AND WIRES TO BE INSTALLED ON TEXTILE MACHINES IN PARTICULARLY ON AUTOMATIC WINDING MACHINES |
| JP4082197B2 (en) * | 2002-12-05 | 2008-04-30 | トヨタ自動車株式会社 | Valve drive system for internal combustion engine |
-
2011
- 2011-09-21 JP JP2011206334A patent/JP2013067465A/en not_active Withdrawn
-
2012
- 2012-05-31 CN CN2012101767399A patent/CN103010845A/en active Pending
- 2012-06-13 EP EP12171726.8A patent/EP2573031B1/en not_active Not-in-force
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6426742A (en) | 1987-07-21 | 1989-01-30 | Murata Machinery Ltd | Ending method in spinning frame |
| JPH0442169U (en) | 1990-08-09 | 1992-04-09 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN103010845A (en) | 2013-04-03 |
| JP2013067465A (en) | 2013-04-18 |
| EP2573031B1 (en) | 2016-04-06 |
| EP2573031A3 (en) | 2014-01-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2573031B1 (en) | Yarn processing device and yarn winding device | |
| JP2013067467A (en) | Yarn splicing device and yarn winding device | |
| EP1460015B1 (en) | Yarn winder | |
| EP2511216B1 (en) | Yarn winding apparatus and yarn withdrawal method | |
| CN107777472B (en) | Yarn splicing device for a workstation of a textile machine for producing cross-wound bobbins | |
| JP2013067464A (en) | Yarn piecing device and yarn winding device | |
| EP2573024B1 (en) | Yarn winding device | |
| EP1457446B9 (en) | Tension control and slack eliminating device for a yarn winder | |
| CN106698096B (en) | Yarn joining mechanism, yarn winding device, and yarn joining method | |
| EP1457447B1 (en) | Tension control and slack eliminating device for a yarn winder | |
| JP2013067472A (en) | Yarn splicing device and yarn winding device | |
| CN113201828B (en) | Joint device, winding unit and yarn winding machine | |
| CN204569014U (en) | Piecing devices, winder unit and fibre machinery | |
| CN109911710B (en) | Rotary yarn splicer for a workstation of a textile machine for producing cross-wound bobbins | |
| EP2078691A2 (en) | Kink preventing device and automatic winder comprising the same | |
| EP3378979A1 (en) | Spinning machine | |
| JPH08229262A (en) | Bobbin thread winding device | |
| JP2017088344A (en) | Tension application device and yarn winding apparatus | |
| CN111470382A (en) | Yarn joining device and yarn winding device | |
| JP7222686B2 (en) | Yarn splicing equipment for textile machinery | |
| JP2019023120A (en) | Yarn splicing device and yarn winding device | |
| JP2014234310A (en) | Yarn splicing device, winding unit, textile machine and yarn splicing method | |
| JP2013067451A (en) | Yarn winding device | |
| JP2014234311A (en) | Yarn splicing device, winding unit, textile machine and yarn splicing method | |
| JP2013063837A (en) | Winding unit and yarn winder |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: B65H 69/06 20060101AFI20131024BHEP |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: B65H 69/06 20060101AFI20131217BHEP |
|
| 17P | Request for examination filed |
Effective date: 20140515 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| 17Q | First examination report despatched |
Effective date: 20140924 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20151112 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 787579 Country of ref document: AT Kind code of ref document: T Effective date: 20160415 Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602012016502 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D Ref country code: NL Ref legal event code: MP Effective date: 20160406 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 787579 Country of ref document: AT Kind code of ref document: T Effective date: 20160406 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160406 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160806 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160406 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160406 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160706 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160406 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160406 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160406 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160707 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160808 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160406 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160406 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160406 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160406 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160406 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602012016502 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160406 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160406 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160406 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160406 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160406 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160406 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160406 |
|
| 26N | No opposition filed |
Effective date: 20170110 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20160706 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20170228 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160630 Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160630 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160406 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160706 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160613 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20120613 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160406 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160406 Ref country code: MT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160630 Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160406 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160613 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160406 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160406 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20210618 Year of fee payment: 10 Ref country code: IT Payment date: 20210625 Year of fee payment: 10 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 602012016502 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230103 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220613 |