EP1985569A1 - Brake device for elevator - Google Patents
Brake device for elevator Download PDFInfo
- Publication number
- EP1985569A1 EP1985569A1 EP06713863A EP06713863A EP1985569A1 EP 1985569 A1 EP1985569 A1 EP 1985569A1 EP 06713863 A EP06713863 A EP 06713863A EP 06713863 A EP06713863 A EP 06713863A EP 1985569 A1 EP1985569 A1 EP 1985569A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- brake
- brake rotor
- rotor
- elevator
- braking
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66D—CAPSTANS; WINCHES; TACKLES, e.g. PULLEY BLOCKS; HOISTS
- B66D5/00—Braking or detent devices characterised by application to lifting or hoisting gear, e.g. for controlling the lowering of loads
- B66D5/02—Crane, lift hoist, or winch brakes operating on drums, barrels, or ropes
- B66D5/06—Crane, lift hoist, or winch brakes operating on drums, barrels, or ropes with radial effect
- B66D5/08—Crane, lift hoist, or winch brakes operating on drums, barrels, or ropes with radial effect embodying blocks or shoes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B1/00—Control systems of elevators in general
- B66B1/24—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration
- B66B1/28—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration electrical
- B66B1/32—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration electrical effective on braking devices, e.g. acting on electrically controlled brakes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B11/00—Main component parts of lifts in, or associated with, buildings or other structures
- B66B11/04—Driving gear ; Details thereof, e.g. seals
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B11/00—Main component parts of lifts in, or associated with, buildings or other structures
- B66B11/04—Driving gear ; Details thereof, e.g. seals
- B66B11/08—Driving gear ; Details thereof, e.g. seals with hoisting rope or cable operated by frictional engagement with a winding drum or sheave
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66D—CAPSTANS; WINCHES; TACKLES, e.g. PULLEY BLOCKS; HOISTS
- B66D5/00—Braking or detent devices characterised by application to lifting or hoisting gear, e.g. for controlling the lowering of loads
- B66D5/02—Crane, lift hoist, or winch brakes operating on drums, barrels, or ropes
- B66D5/24—Operating devices
- B66D5/30—Operating devices electrical
Definitions
- the present invention relates to a brake device for an elevator which brings a brake shoe into frictional contact with a brake rotor to brake rotation of the brake rotor and thereby stop a car.
- a brake device for an elevator disclosed in Patent Document 1 is constructed such that rotation of a brake pulley is selectively braked by a first electromagnetic brake or a second electromagnetic brake.
- the timings for operating the first electromagnetic brake and the second electromagnetic brake are shifted from each other upon the issuance of a sudden stop command so as to absorb the shock caused upon a stop.
- the first electromagnetic brake and the second electromagnetic brake can be operated simultaneously to ensure a required stopping distance.
- Patent Document 1 JP 03-243576 A
- the present invention has been made to solve the above-mentioned problem, and it is therefore an object of the present invention to provide a brake device for an elevator which can control the deceleration at the time of an emergency stop more appropriately.
- a brake device for an elevator includes: a brake rotor; a brake shoe that can be moved into contact with and away from the brake rotor, for braking rotation of the brake rotor through friction to stop a car; and a torque receiving portion for receiving a rotational torque applied to the brake shoe at a time of braking, in which the torque receiving portion is provided with an oscillatory actuator for causing the brake shoe to oscillate in a rotational direction of the brake rotor.
- a brake device for an elevator includes: a brake rotor; a brake shoe that can be moved into contact with and away from the brake rotor, for braking rotation of the brake rotor through friction to stop a car; an oscillatory actuator for causing the brake shoe to oscillate in a rotational direction of the brake rotor; a speed sensor for detecting a rotational speed of the brake rotor; and an oscillation control portion for controlling an amplitude and a frequency of oscillations of the oscillatory actuator in accordance with a signal from the speed sensor to control a speed difference between the brake rotor and the brake shoe in the rotational direction of the brake rotor.
- a brake device for an elevator includes: a brake rotor; a brake shoe that can be moved into contact with and away from the brake rotor, for braking rotation of the brake rotor through friction to stop a car; an oscillatory actuator for causing the brake shoe to oscillate in a rotational direction of the brake rotor; and a generator for generating an electric power through rotation of the brake rotor to supply the oscillatory actuator with the electric power.
- FIG. 1 is a front view showing an essential part of a brake device for an elevator according to Embodiment 1 of the present invention in partial cross-section.
- the brake device illustrated in this example is provided on a hoisting machine for raising/lowering a car and a counterweight.
- a cylindrical brake drum 1 which is a brake rotor is provided with a drive sheave coaxially therewith.
- the brake drum 1 is rotated integrally with the drive sheave.
- a main rope for suspending the car and the counterweight is wound around the drive sheave. The car and the counterweight are raised/lowered within a hoistway through rotation of the drive sheave.
- An inner frame 2 fixed to a fixed portion of the hoisting machine is provided inside the brake drum 1.
- a pair of electromagnets 3 (only one of the electromagnets 3 is shown in FIG. 1 ) are fixed to the inner frame 2.
- Each of the electromagnets 3 includes a core 4 and a brake coil 5.
- the fixed cores 4 are fixed to the inner frame 2, and the brake coils 5 are fixed to the fixed cores 4.
- a corresponding one of movable cores 6 is moved into contact with and away from each of the fixed cores 4.
- a corresponding one of brake shoes 7, which are moved into contact with and away from an inner peripheral surface of the brake drum 1, is coupled to each of the movable cores 6.
- Each of the fixed cores 4 is provided with a plurality of brake springs 8 for pressing a corresponding one of the movable cores 6 to press a corresponding one of the brake shoes 7 against the inner peripheral surface of the brake drum 1.
- the braking force applied to the brake drum 1 is cancelled when the car and the counterweight are raised/lowered. Rotation of the brake drum 1 is braked (brake drum 1 is held stationary) while the car and the counterweight remain stopped.
- an emergency stop command is issued during the raising/lowering of the car and the counterweight, the supply of electric current to a motor of the hoisting machine is cut off, so the supply of electric current to the brake coils 5 is cut off.
- the brake shoes 7 are pressed against the brake drum 1, so rotation of the brake drum 1 and rotation of the drive sheave are braked. As a result, the car and the counterweight are stopped as an emergency measure.
- the inner frame 2 is provided with a plurality of torque receiving portions 9 for receiving rotational torques applied to the brake shoes 7 from the brake drum 1 at the time of braking.
- Each of the torque receiving portions 9 is provided with a corresponding one of torque receiving surfaces 9a on which an end of a corresponding one of the brake shoes 7 comes into abutment.
- Oscillatory actuators 10 for causing the brake shoes 7 to oscillate in a rotational direction (circumferential direction) of the brake drum 1 at the time of emergency braking are embedded in the torque receiving portions 9.
- the brake shoes 7 can be caused to oscillate slightly in the rotational direction of the brake drum 1 by being shaken from the oscillatory actuators 10.
- the brake shoes 7 are caused to oscillate in accordance with the rotational direction of the brake drum 1 by the oscillatory actuators 10 provided in the torque receiving portions 9, which receive torques from the brake shoes 7.
- each of the oscillatory actuators 10 outputs to an elevator control device an electric signal corresponding to a pressure received by a corresponding one of the torque receiving portions 9 from a corresponding one of the brake shoes 7.
- the elevator control device opens the brake shoes 7 away from the brake drum 1 while causing the hoisting machine to generate a torque such that the pressure applied to each of the torque receiving portions 9 becomes zero. That is, each of the oscillatory actuators 10 functions as a weighing device for activation as well.
- the inner frame 2 is provided with a plurality of oscillation control portions 11 for controlling the oscillatory actuators 10, and a plurality of speed sensors 12 for detecting the rotational speed of the brake drum 1 or the moving speed of a drum surface of the brake drum 1.
- Each of those oscillation control portions 11 and each of those speed sensors 12 are disposed in the vicinity of a corresponding one of the oscillatory actuators 10.
- Each of the speed sensors 12 also serves as an alternating-current generator for generating electric power through rotation of the brake drum 1.
- each of the oscillation control portions 11 controls the amplitude and frequency of the oscillations of a corresponding one of the oscillatory actuators 10 in accordance with a signal from a corresponding one of the speed sensors 12, thereby controlling the speed difference between the brake drum 1 and a corresponding one of the brake shoes 7 in the rotational direction of the brake drum 1.
- each of the oscillation control portions 11 causes a corresponding one of the oscillatory actuators 10 to oscillate after a corresponding one of the brake shoes 7 has come into contact with the brake drum 1, and also before the corresponding one of the brake shoes 7 comes into contact with the brake drum 1 after having started braking operation.
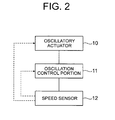
- FIG. 2 is a block diagram showing an essential part of FIG. 1 . As indicated by broken lines of FIG. 2 , electric power generated by each of the speed sensors 12, which also serves as an alternating-current generator, is supplied to a corresponding one of the oscillatory actuators 10 and a corresponding one of the oscillation control portions 11.
- FIG. 3 is composed of graphs showing how the brake device of FIG. 1 is controlled in a certain time range during emergency braking. More specifically, the uppermost graph of FIG. 3 shows a speed Vm of that portion of the brake drum 1 which is in contact with each of the brake shoes 7, and a speed Vs of each of the brake shoes 7. The middle graph of FIG. 3 shows a speed difference between Vs and Vm. The lowermost graph of FIG. 3 shows a braking force F received by the brake drum 1.
- the values of the speeds Vm and Vs are expressed on the assumption that the direction of the speed of the brake drum 1 is positive.
- the value of the braking force F is assumed to be positive when acting in such a direction as to stop the brake drum 1.
- the time range shown in FIG. 3 serves to represent changes during about one period T0 of oscillations.
- each of the brake shoes 7 is caused to oscillate by a corresponding one of the oscillatory actuators 10 at the speed Vs expressed below.
- a section from a to b where Vs > Vm is satisfied is set within the period T0.
- the sign of the speed difference (Vs-Vm) in the section from a to b is reverse to the sign of the speed difference (Vs-Vm) in the other sections.
- the magnitude F0 of the braking force applied to the brake drum 1 is expressed by the following formula given that P represents a pressing force exerted by each of the brake shoes 7 and ⁇ represents a friction coefficient between the brake drum 1 and each of the brake shoes 7.
- F ⁇ 0 P ⁇ ⁇
- a negative braking force -F0 is applied to the brake drum 1 in the section from a to b.
- Fa F ⁇ 0 ⁇ T ⁇ 0 - 2 ⁇ Td / T ⁇ 0 Td: time interval during which braking force becomes negative
- the above-mentioned ⁇ is a coefficient representing a rate of change in braking force. Accordingly, the average braking force can be reduced by causing the brake shoes 7 to oscillate at the speed Vs, and the braking force can be controlled by changing the time interval Td during which the braking force is negative.
- the oscillation pattern (displacement) of the oscillatory actuators 10 is expressed by a sinusoidal wave with an amplitude A and a frequency ⁇
- the amplitude of oscillation speed is expressed as ⁇ A. It is therefore appropriate to change the amplitude A, the frequency ⁇ , or both the amplitude A and the frequency ⁇ in order to change the oscillation speed Vs of the brake shoes 7.
- the brake shoes 7 are caused to oscillate by the oscillatory actuators 10 at the time of emergency braking, so the deceleration at the time of an emergency stop can be controlled more appropriately. As a result, the shock caused upon a stop can be absorbed to improve riding quality.
- the oscillatory actuators 10 are provided in the torque receiving portions 9, so the brake shoes 7 can be caused to oscillate efficiently in the rotational direction of the brake drum 1.
- the oscillatory actuators 10 also function as weighing devices for activation, so there is no need to install weighing devices for activation separately. In consequence, a reduction in cost can be achieved. Further, at the time of emergency braking, each of the oscillation control portions 11 causes a corresponding one of the oscillatory actuators 10 to oscillate also before a corresponding one of the brake shoes 7 comes into contact with the brake drum 1 after having started braking operation, so the friction resistance between each of the brake shoes 7 and a corresponding one of the torque receiving surfaces 9a decreases. As a result, a braking torque can be generated swiftly, and the amount of abrasion between each of the torque receiving surfaces 9a and a corresponding one of the brake shoes 7 can be reduced.
- the speed sensors 12 are provided in the vicinity of the oscillatory actuators 10, and each of the oscillation control portions 11 controls the amplitude and frequency of the oscillations of a corresponding one of the oscillatory actuators 10 in accordance with a signal from a corresponding one of the speed sensors 12 to control the speed difference between the brake drum 1 and a corresponding one of the brake shoes 7 in the rotational direction of the brake drum 1. Therefore, the ratio between a time period in which the speed difference is positive and a time period in which the speed difference is negative can be controlled to control the deceleration at the time of an emergency stop more appropriately.
- the alternating-current generators (speed sensors 12), which generate electric power through rotation of the brake drum 1, are provided to supply the oscillatory actuators 10 with electric power. Therefore, power supplies independent of other control power supplies can be secured, so electric power can constantly be supplied during braking.
- the frequency of a power generation voltage is used as the frequency ⁇ of the oscillation pattern.
- the frequency ⁇ of the oscillation pattern can be lowered automatically as the brake drum 1 decelerates through braking, so the braking force can be held constant during deceleration as well.
- piezoelectric elements are employed as the oscillatory actuators 10, so the oscillatory actuators 10 can be miniaturized. The piezoelectric elements are designed to be driven through application of voltages, and can therefore be driven directly through the power generation voltages of the alternating-current generators. As a result, the oscillation control portions 11 can be simplified.
- Direct-current generators may also be employed as the generators.
- power generation voltage signals can be used as signals for detecting rotation of the brake rotor.
- the speed sensors may be used commonly to serve as speed sensors for driving the hoisting machine.
- the oscillatory actuators may be controlled using a signal from a motor encoder for detecting rotation of a rotary shaft of the motor of the hoisting machine.
- the brake shoes 7 may be provided outside the brake drum.
- the brake rotor may be a brake disc.
- the brake device may be a disc brake.
- the brake device is provided on the hoisting machine in the foregoing example.
- the brake device may be provided at another position, for example, on a suspension pulley, a return pulley, or a deflector pulley.
- the oscillatory actuators may be mounted on the brake shoes sides or provided at those portions of the brake shoes which are coupled to the movable cores.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Braking Arrangements (AREA)
- Cage And Drive Apparatuses For Elevators (AREA)
Abstract
Description
- The present invention relates to a brake device for an elevator which brings a brake shoe into frictional contact with a brake rotor to brake rotation of the brake rotor and thereby stop a car.
- For the purpose of reducing the capacities of an electric motor and a control device and conserving the energy thereof, attempts to lower the inertia around the electric motor such as the weight saving of a car and the like have been promoted. Nowadays, the inertial mass of a shaft of the electric motor as a reduced value tends to decrease due to the popularization of a gearless hoisting machine having no gears. However, the above-mentioned attempts to lower the inertia lead to an increase in the deceleration at the time of a stop by a brake and hence discomfort passengers. Also, such attempts cause an increase in the difference in deceleration, which depends on the load within the car and the running direction thereof, so it is difficult to set such a braking force that achieves both a reduction in emergency stopping distance and a reduction in the shock caused upon a stop.
Various methods have been proposed to cope with the foregoing situation. For example, a brake device for an elevator disclosed in Patent Document 1 is constructed such that rotation of a brake pulley is selectively braked by a first electromagnetic brake or a second electromagnetic brake. More specifically, when the load within the car is heavy during upward operation thereof or when the load within the car is light during downward operation thereof, the timings for operating the first electromagnetic brake and the second electromagnetic brake are shifted from each other upon the issuance of a sudden stop command so as to absorb the shock caused upon a stop. When the load within the car is light during upward operation thereof or when the load within the car is heavy during downward operation thereof, the first electromagnetic brake and the second electromagnetic brake can be operated simultaneously to ensure a required stopping distance. - Patent Document 1:
JP 03-243576 A - In the conventional brake device for the elevator constructed as described above, the timings for operating the first electromagnetic brake and the second electromagnetic brake are shifted from each other to reduce the braking force of the brake device, so this braking force can be controlled only in two levels. As a result, there have been demands for more appropriate control of deceleration for different loads within the car.
- The present invention has been made to solve the above-mentioned problem, and it is therefore an object of the present invention to provide a brake device for an elevator which can control the deceleration at the time of an emergency stop more appropriately.
- A brake device for an elevator according to the present invention includes: a brake rotor; a brake shoe that can be moved into contact with and away from the brake rotor, for braking rotation of the brake rotor through friction to stop a car; and a torque receiving portion for receiving a rotational torque applied to the brake shoe at a time of braking, in which the torque receiving portion is provided with an oscillatory actuator for causing the brake shoe to oscillate in a rotational direction of the brake rotor.
Further, a brake device for an elevator according to the present invention includes: a brake rotor; a brake shoe that can be moved into contact with and away from the brake rotor, for braking rotation of the brake rotor through friction to stop a car; an oscillatory actuator for causing the brake shoe to oscillate in a rotational direction of the brake rotor; a speed sensor for detecting a rotational speed of the brake rotor; and an oscillation control portion for controlling an amplitude and a frequency of oscillations of the oscillatory actuator in accordance with a signal from the speed sensor to control a speed difference between the brake rotor and the brake shoe in the rotational direction of the brake rotor.
Moreover, a brake device for an elevator according to the present invention includes: a brake rotor; a brake shoe that can be moved into contact with and away from the brake rotor, for braking rotation of the brake rotor through friction to stop a car; an oscillatory actuator for causing the brake shoe to oscillate in a rotational direction of the brake rotor; and a generator for generating an electric power through rotation of the brake rotor to supply the oscillatory actuator with the electric power. -
-
FIG. 1 is a front view showing an essential part of a brake device for an elevator according to Embodiment 1 of the present invention in partial cross-section. -
FIG. 2 is a block diagram showing an essential part ofFIG. 1 . -
FIG. 3 is composed of graphs showing how the brake device ofFIG. 1 is controlled in a certain time range during emergency braking thereof. - A preferred embodiment of the present invention will be described hereinafter with reference to the drawings.
-
FIG. 1 is a front view showing an essential part of a brake device for an elevator according to Embodiment 1 of the present invention in partial cross-section. The brake device illustrated in this example is provided on a hoisting machine for raising/lowering a car and a counterweight. - Referring to
FIG. 1 , a cylindrical brake drum 1 which is a brake rotor is provided with a drive sheave coaxially therewith. The brake drum 1 is rotated integrally with the drive sheave. A main rope for suspending the car and the counterweight is wound around the drive sheave. The car and the counterweight are raised/lowered within a hoistway through rotation of the drive sheave. - An inner frame 2 fixed to a fixed portion of the hoisting machine is provided inside the brake drum 1. A pair of electromagnets 3 (only one of the
electromagnets 3 is shown inFIG. 1 ) are fixed to the inner frame 2. Each of theelectromagnets 3 includes acore 4 and abrake coil 5. Thefixed cores 4 are fixed to the inner frame 2, and thebrake coils 5 are fixed to thefixed cores 4. - A corresponding one of
movable cores 6 is moved into contact with and away from each of thefixed cores 4. A corresponding one ofbrake shoes 7, which are moved into contact with and away from an inner peripheral surface of the brake drum 1, is coupled to each of themovable cores 6. Each of thefixed cores 4 is provided with a plurality ofbrake springs 8 for pressing a corresponding one of themovable cores 6 to press a corresponding one of thebrake shoes 7 against the inner peripheral surface of the brake drum 1. - When the
brake shoes 7 are pressed against the inner peripheral surface of the brake drum 1, rotation of the brake drum 1 is thereby braked through friction. When theelectromagnets 3 are excited, themovable cores 6 are sucked toward thefixed cores 4 sides against thebrake springs 8, so thebrake shoes 7 are opened away from the inner peripheral surface of the brake drum 1. Thus, the braking force applied to the brake drum 1 is canceled. - The braking force applied to the brake drum 1 is cancelled when the car and the counterweight are raised/lowered. Rotation of the brake drum 1 is braked (brake drum 1 is held stationary) while the car and the counterweight remain stopped. In addition, when an emergency stop command is issued during the raising/lowering of the car and the counterweight, the supply of electric current to a motor of the hoisting machine is cut off, so the supply of electric current to the
brake coils 5 is cut off. Thus, thebrake shoes 7 are pressed against the brake drum 1, so rotation of the brake drum 1 and rotation of the drive sheave are braked. As a result, the car and the counterweight are stopped as an emergency measure. - The inner frame 2 is provided with a plurality of
torque receiving portions 9 for receiving rotational torques applied to thebrake shoes 7 from the brake drum 1 at the time of braking. Each of thetorque receiving portions 9 is provided with a corresponding one of torque receivingsurfaces 9a on which an end of a corresponding one of thebrake shoes 7 comes into abutment. -
Oscillatory actuators 10 for causing thebrake shoes 7 to oscillate in a rotational direction (circumferential direction) of the brake drum 1 at the time of emergency braking are embedded in thetorque receiving portions 9. To put it the other way around, thebrake shoes 7 can be caused to oscillate slightly in the rotational direction of the brake drum 1 by being shaken from theoscillatory actuators 10. At the time of emergency braking, thebrake shoes 7 are caused to oscillate in accordance with the rotational direction of the brake drum 1 by theoscillatory actuators 10 provided in thetorque receiving portions 9, which receive torques from thebrake shoes 7. - Employed as the
oscillatory actuators 10 are, for example, piezoelectric elements. When the car is activated, each of theoscillatory actuators 10 outputs to an elevator control device an electric signal corresponding to a pressure received by a corresponding one of thetorque receiving portions 9 from a corresponding one of thebrake shoes 7. In activating the car, the elevator control device opens thebrake shoes 7 away from the brake drum 1 while causing the hoisting machine to generate a torque such that the pressure applied to each of thetorque receiving portions 9 becomes zero. That is, each of theoscillatory actuators 10 functions as a weighing device for activation as well. - The inner frame 2 is provided with a plurality of
oscillation control portions 11 for controlling theoscillatory actuators 10, and a plurality ofspeed sensors 12 for detecting the rotational speed of the brake drum 1 or the moving speed of a drum surface of the brake drum 1. Each of thoseoscillation control portions 11 and each of thosespeed sensors 12 are disposed in the vicinity of a corresponding one of theoscillatory actuators 10. Each of thespeed sensors 12 also serves as an alternating-current generator for generating electric power through rotation of the brake drum 1. - At the time of emergency braking, each of the
oscillation control portions 11 controls the amplitude and frequency of the oscillations of a corresponding one of theoscillatory actuators 10 in accordance with a signal from a corresponding one of thespeed sensors 12, thereby controlling the speed difference between the brake drum 1 and a corresponding one of thebrake shoes 7 in the rotational direction of the brake drum 1. At the time of emergency braking, each of theoscillation control portions 11 causes a corresponding one of theoscillatory actuators 10 to oscillate after a corresponding one of thebrake shoes 7 has come into contact with the brake drum 1, and also before the corresponding one of thebrake shoes 7 comes into contact with the brake drum 1 after having started braking operation. -
FIG. 2 is a block diagram showing an essential part ofFIG. 1 . As indicated by broken lines ofFIG. 2 , electric power generated by each of thespeed sensors 12, which also serves as an alternating-current generator, is supplied to a corresponding one of theoscillatory actuators 10 and a corresponding one of theoscillation control portions 11. -
FIG. 3 is composed of graphs showing how the brake device ofFIG. 1 is controlled in a certain time range during emergency braking.
More specifically, the uppermost graph ofFIG. 3 shows a speed Vm of that portion of the brake drum 1 which is in contact with each of thebrake shoes 7, and a speed Vs of each of thebrake shoes 7. The middle graph ofFIG. 3 shows a speed difference between Vs and Vm. The lowermost graph ofFIG. 3 shows a braking force F received by the brake drum 1. - The values of the speeds Vm and Vs are expressed on the assumption that the direction of the speed of the brake drum 1 is positive. The value of the braking force F is assumed to be positive when acting in such a direction as to stop the brake drum 1. In addition, the time range shown in
FIG. 3 serves to represent changes during about one period T0 of oscillations. - After the start of braking, each of the
brake shoes 7 is caused to oscillate by a corresponding one of theoscillatory actuators 10 at the speed Vs expressed below.

oscillatory actuators 10, and that f(t) represents a periodic function with a period of T0. - A section from a to b where Vs > Vm is satisfied is set within the period T0. Thus, the sign of the speed difference (Vs-Vm) in the section from a to b is reverse to the sign of the speed difference (Vs-Vm) in the other sections. The magnitude F0 of the braking force applied to the brake drum 1 is expressed by the following formula given that P represents a pressing force exerted by each of the
brake shoes 7 and µ represents a friction coefficient between the brake drum 1 and each of thebrake shoes 7.
- Accordingly, while a positive braking force F0 is applied to the brake drum 1 other than the section from a to b, a negative braking force -F0 is applied to the brake drum 1 in the section from a to b.
- An average braking force Fa during a time T0 corresponding to one period of Vs is expressed by the following formula.

- Further, the following formula is established when a comparison is made between a case where the
brake shoes 7 are caused to oscillate and a case where thebrake shoes 7 are not caused to oscillate.
- The above-mentioned α is a coefficient representing a rate of change in braking force. Accordingly, the average braking force can be reduced by causing the
brake shoes 7 to oscillate at the speed Vs, and the braking force can be controlled by changing the time interval Td during which the braking force is negative. For example, given that the oscillation pattern (displacement) of theoscillatory actuators 10 is expressed by a sinusoidal wave with an amplitude A and a frequency ω, the amplitude of oscillation speed is expressed as ωA. It is therefore appropriate to change the amplitude A, the frequency ω, or both the amplitude A and the frequency ω in order to change the oscillation speed Vs of thebrake shoes 7. - In the foregoing description, the duration of the period T0 has been described. In fact, however, the
oscillatory actuators 10 are continuously driven until the brake drum 1 is stopped. In the meantime, the brake drum 1 is decelerated. This phenomenon corresponds to a decrease in V0 ofFIG. 3 . Thus, given that the driving pattern of theoscillatory actuators 10 is constant, the time interval Td during which Vs > Vm is satisfied increases, so the braking force Fa decreases. - Therefore, in order to obtain a desired value of Fa, it is appropriate to calculate in advance a change in the speed of the brake drum 1 in the case where a predetermined braking force is applied thereto, and set the oscillation pattern on the basis of the calculated change in the speed such that a predetermined value of Td is obtained for each oscillation period. Further, when an oscillation pattern for obtaining the desired value of Fa for the speed Vm is determined, the frequency ω or the amplitude A of the oscillation pattern is changed in proportion to changes in Vm to hold the value of brake torque equal to Fa.
- In the brake device for the elevator constructed as described above, the
brake shoes 7 are caused to oscillate by theoscillatory actuators 10 at the time of emergency braking, so the deceleration at the time of an emergency stop can be controlled more appropriately.
As a result, the shock caused upon a stop can be absorbed to improve riding quality. Theoscillatory actuators 10 are provided in thetorque receiving portions 9, so thebrake shoes 7 can be caused to oscillate efficiently in the rotational direction of the brake drum 1. - The
oscillatory actuators 10 also function as weighing devices for activation, so there is no need to install weighing devices for activation separately. In consequence, a reduction in cost can be achieved.
Further, at the time of emergency braking, each of theoscillation control portions 11 causes a corresponding one of theoscillatory actuators 10 to oscillate also before a corresponding one of thebrake shoes 7 comes into contact with the brake drum 1 after having started braking operation, so the friction resistance between each of thebrake shoes 7 and a corresponding one of the torque receiving surfaces 9a decreases. As a result, a braking torque can be generated swiftly, and the amount of abrasion between each of the torque receiving surfaces 9a and a corresponding one of thebrake shoes 7 can be reduced. - Still further, the
speed sensors 12 are provided in the vicinity of theoscillatory actuators 10, and each of theoscillation control portions 11 controls the amplitude and frequency of the oscillations of a corresponding one of theoscillatory actuators 10 in accordance with a signal from a corresponding one of thespeed sensors 12 to control the speed difference between the brake drum 1 and a corresponding one of thebrake shoes 7 in the rotational direction of the brake drum 1. Therefore, the ratio between a time period in which the speed difference is positive and a time period in which the speed difference is negative can be controlled to control the deceleration at the time of an emergency stop more appropriately. - The alternating-current generators (speed sensors 12), which generate electric power through rotation of the brake drum 1, are provided to supply the
oscillatory actuators 10 with electric power. Therefore, power supplies independent of other control power supplies can be secured, so electric power can constantly be supplied during braking. In this case, the frequency of a power generation voltage is used as the frequency ω of the oscillation pattern. Thus, the frequency ω of the oscillation pattern can be lowered automatically as the brake drum 1 decelerates through braking, so the braking force can be held constant during deceleration as well.
Further, piezoelectric elements are employed as theoscillatory actuators 10, so theoscillatory actuators 10 can be miniaturized. The piezoelectric elements are designed to be driven through application of voltages, and can therefore be driven directly through the power generation voltages of the alternating-current generators. As a result, theoscillation control portions 11 can be simplified. - Direct-current generators may also be employed as the generators. In this case, power generation voltage signals can be used as signals for detecting rotation of the brake rotor.
The speed sensors may be used commonly to serve as speed sensors for driving the hoisting machine.
Further, the oscillatory actuators may be controlled using a signal from a motor encoder for detecting rotation of a rotary shaft of the motor of the hoisting machine. - Still further, the
brake shoes 7 may be provided outside the brake drum.
The brake rotor may be a brake disc. In other words, the brake device may be a disc brake.
Further, the brake device is provided on the hoisting machine in the foregoing example. However, the brake device may be provided at another position, for example, on a suspension pulley, a return pulley, or a deflector pulley.
Still further, the oscillatory actuators may be mounted on the brake shoes sides or provided at those portions of the brake shoes which are coupled to the movable cores.
Claims (5)
- A brake device for an elevator, comprising:a brake rotor;a brake shoe that can be moved into contact with and away from the brake rotor, for braking rotation of the brake rotor through friction to stop a car; anda torque receiving portion for receiving a rotational torque applied to the brake shoe at a time of braking, whereinthe torque receiving portion is provided with an oscillatory actuator for causing the brake shoe to oscillate in a rotational direction of the brake rotor.
- A brake device for an elevator according to Claim 1, wherein the oscillatory actuator is a piezoelectric element that outputs to an elevator control device an electric signal corresponding to a pressure received by the torque receiving portion from the brake shoe when the car is activated.
- A brake device for an elevator according to Claim 1, further comprising an oscillation control portion for controlling the oscillatory actuator, wherein
the oscillation control portion causes the oscillatory actuator to oscillate at a time of emergency braking, after the brake shoe comes into contact with the brake rotor and also before the brake shoe comes into contact with the brake rotor after starting braking operation. - A brake device for an elevator, comprising:a brake rotor; anda brake shoe that can be moved into contact with and away from the brake rotor, for braking rotation of the brake rotor through friction to stop a car, the brake device for an elevator further comprising:an oscillatory actuator for causing the brake shoe to oscillate in a rotational direction of the brake rotor;a speed sensor for detecting a rotational speed of the brake rotor; andan oscillation control portion for controlling an amplitude and a frequency of oscillations of the oscillatory actuator in accordance with a signal from the speed sensor to control a speed difference between the brake rotor and the brake shoe in the rotational direction of the brake rotor.
- A brake device for an elevator, comprising:a brake rotor; anda brake shoe that can be moved into contact with and away from the brake rotor, for braking rotation of the brake rotor through friction to stop a car, the brake device for an elevator further comprising:an oscillatory actuator for causing the brake shoe to oscillate in a rotational direction of the brake rotor; anda generator for generating an electric power through rotation of the brake rotor to supply the oscillatory actuator with the electric power.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2006/302722 WO2007094065A1 (en) | 2006-02-16 | 2006-02-16 | Brake device for elevator |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1985569A1 true EP1985569A1 (en) | 2008-10-29 |
| EP1985569A4 EP1985569A4 (en) | 2013-10-23 |
Family
ID=38371259
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP06713863.6A Withdrawn EP1985569A4 (en) | 2006-02-16 | 2006-02-16 | Brake device for elevator |
Country Status (5)
| Country | Link |
|---|---|
| EP (1) | EP1985569A4 (en) |
| JP (1) | JPWO2007094065A1 (en) |
| KR (1) | KR100954260B1 (en) |
| CN (1) | CN101171196B (en) |
| WO (1) | WO2007094065A1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013151333A (en) * | 2012-01-24 | 2013-08-08 | Hitachi Ltd | Hoisting machine for elevator |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11294502A (en) * | 1998-04-09 | 1999-10-29 | Mitsubishi Electric Corp | Friction brake, disc brake device, disk brake device for elevator |
| JP2000318957A (en) * | 1999-05-10 | 2000-11-21 | Hitachi Ltd | Elevator device including no machinery room |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS571180A (en) * | 1980-06-02 | 1982-01-06 | Mitsubishi Electric Corp | Elevator device |
| JP4513176B2 (en) * | 2000-06-22 | 2010-07-28 | 三菱電機株式会社 | Elevator control device |
| EP1557392A4 (en) * | 2002-10-29 | 2011-05-18 | Mitsubishi Electric Corp | Brake device of elevator |
-
2006
- 2006-02-16 WO PCT/JP2006/302722 patent/WO2007094065A1/en active Application Filing
- 2006-02-16 JP JP2007521731A patent/JPWO2007094065A1/en active Pending
- 2006-02-16 CN CN2006800148799A patent/CN101171196B/en not_active Expired - Fee Related
- 2006-02-16 EP EP06713863.6A patent/EP1985569A4/en not_active Withdrawn
- 2006-02-16 KR KR1020077024349A patent/KR100954260B1/en not_active IP Right Cessation
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11294502A (en) * | 1998-04-09 | 1999-10-29 | Mitsubishi Electric Corp | Friction brake, disc brake device, disk brake device for elevator |
| JP2000318957A (en) * | 1999-05-10 | 2000-11-21 | Hitachi Ltd | Elevator device including no machinery room |
Non-Patent Citations (1)
| Title |
|---|
| See also references of WO2007094065A1 * |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013151333A (en) * | 2012-01-24 | 2013-08-08 | Hitachi Ltd | Hoisting machine for elevator |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20080003824A (en) | 2008-01-08 |
| JPWO2007094065A1 (en) | 2009-07-02 |
| CN101171196B (en) | 2012-05-02 |
| WO2007094065A1 (en) | 2007-08-23 |
| KR100954260B1 (en) | 2010-04-23 |
| EP1985569A4 (en) | 2013-10-23 |
| CN101171196A (en) | 2008-04-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4975103B2 (en) | Elevator equipment | |
| JP4267335B2 (en) | Elevator braking control device | |
| JP5214239B2 (en) | Elevator equipment | |
| KR101152565B1 (en) | Elevator | |
| KR101014960B1 (en) | Elevator device | |
| KR101288722B1 (en) | Brake device for elevator | |
| JP5369616B2 (en) | Elevator | |
| JP2009526723A (en) | Elevator brake condition test | |
| JPH0780646B2 (en) | Elevator control equipment | |
| CN108698790B (en) | Elevator and rescue operation control method | |
| KR101080601B1 (en) | Elevator apparatus | |
| EP2558394B1 (en) | Elevator system | |
| JP5079288B2 (en) | Elevator equipment | |
| EP1923345B1 (en) | Brake device for elevator | |
| EP2862831A2 (en) | Elevator hoisting machine and an elevator installation | |
| EP1985569A1 (en) | Brake device for elevator | |
| JP4456945B2 (en) | Elevator equipment | |
| JP2003221171A (en) | Braking device for elevator | |
| JP2009057186A (en) | Elevator control method | |
| JP5365090B2 (en) | Elevator equipment | |
| EP1724225A1 (en) | Emergency brake device of elevator | |
| KR100901229B1 (en) | Elevator device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20071017 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): DE |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: B66B 11/08 20060101ALI20081203BHEP Ipc: B66B 1/32 20060101AFI20081203BHEP |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): DE |
|
| DAX | Request for extension of the european patent (deleted) | ||
| A4 | Supplementary search report drawn up and despatched |
Effective date: 20130919 |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: B66D 5/08 20060101ALI20130913BHEP Ipc: B66B 11/08 20060101ALI20130913BHEP Ipc: B66D 5/30 20060101ALI20130913BHEP Ipc: B66B 1/32 20060101AFI20130913BHEP |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20140318 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION IS DEEMED TO BE WITHDRAWN |
|
| 18D | Application deemed to be withdrawn |
Effective date: 20140729 |