EP0931753A1 - Variable-speed passenger conveyor and handrail device therefor - Google Patents
Variable-speed passenger conveyor and handrail device therefor Download PDFInfo
- Publication number
- EP0931753A1 EP0931753A1 EP98101154A EP98101154A EP0931753A1 EP 0931753 A1 EP0931753 A1 EP 0931753A1 EP 98101154 A EP98101154 A EP 98101154A EP 98101154 A EP98101154 A EP 98101154A EP 0931753 A1 EP0931753 A1 EP 0931753A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- speed
- guide
- guide rail
- handrail
- acceleration
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images




























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B21/00—Kinds or types of escalators or moving walkways
- B66B21/10—Moving walkways
- B66B21/12—Moving walkways of variable speed type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B23/00—Component parts of escalators or moving walkways
- B66B23/14—Guiding means for carrying surfaces
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B23/00—Component parts of escalators or moving walkways
- B66B23/22—Balustrades
- B66B23/24—Handrails
- B66B23/26—Handrails of variable speed type
Definitions
- the present invention relates to a passenger conveyer such as a moving sidewalk or an escalator and a handrail apparatus therefor, and particularly to a variable-speed passenger conveyer wherein the movement speed of the pallets is changed between the boarding and disembarking ends and a handrail apparatus therefor.
- Passenger conveyers which transport passengers without causing the passengers to walk have recently been widely installed in airports, train stations, tourist areas, and so forth.
- the majority of such conventional passenger conveyers is such wherein the speed is constant from the boarding end to the disembarking end.
- the speed at the boarding end to the disembarking end needs to be set at 50 meters per minute or less in order to maintain safety, and the speed remains constant from the boarding end to the disembarking end.
- variable-speed passenger conveyers arranged such that the speed at the boarding end is the aforementioned speed, the speed then gradually accelerating to a higher speed at the intermediate area, and then gradually decelerating to the same speed at the disembarking end, thereby maintaining the safety of passengers boarding and disembarking, but the majority of such variable-speed passenger conveyers has involved an arrangement of changing the spacing of the pallets to change the speed.
- variable-speed passenger conveyer A proposal for a variable-speed passenger conveyer is disclosed in Japanese Unexamined Patent Publication No. 49-43371 as a "variable-speed driving apparatus", wherein the height of a triangular belt link linked to a carriage and two pallets running along a rail which changes in height in the direction of progression, thereby changing the pallet spacing.
- the structure of the handrail described in the Patent Publication involves loop-shaped guide rails to be provided to the outer side and inner side within a vertical plane, wherein the spacing of the outer and inner guide rails is narrowed at the high speed zone and widened at the boarding and disembarking ends.
- a handrail piece stretchably linked in the direction of transportation via the outer guide roller
- an inner guide roller which is moved by means of being engaged with claws on a high-speed driving chain.
- the front and back of the handrail piece and an inner guide roller are linked by a V-shaped link provided within a vertical plane.
- the angle of the link is an acute angle at the at the boarding and disembarking ends, due to the spacing between the outer and inner guide rails being great thereat, thus narrowing the spacing between the handrail pieces and creating a state of low speed for the handrails.
- the angle of the link is an obtuse angle at the at the intermediate high-speed zone, due to the spacing between the outer and inner guide rails being narrow thereat, thus widening the spacing between the handrail pieces and creating a state of high speed for the handrails.
- the present invention provides a first variable-speed passenger conveyer which changes the transporting speed in the section between the boarding end and disembarking end by changing the spacing of pallets.
- the first variable-speed passenger conveyer comprises: a pair of guide rails provided in loop fashion to the transporting line so that the width spacing is gradually reduced from the boarding end to the beginning of the high-speed zone and gradually increased from the end of the high-speed zone to the disembarking end; a chain which engages the pallets at the high-speed zone and drives at high speed; a guide roller which is guided by an engaging metal piece at the bottom portion engaging the chain and by the pair of guide rails; pallets provided with a spline shaft for sliding the guide roller in a right-angle direction with the transporting direction; and link members linking in a planar rhombic form the guide roller and the guide roller of the palette adjacent to the guide roller via intermediate joints.
- the movement speed of the pallets changes at the boarding end and disembarking end owing to change in the width of the guide rail, so acceleration and deceleration is smooth, and safety is maintained.
- the present invention provides a second variable-speed passenger conveyer according to the first variable-speed passenger conveyer.
- the second variable-speed passenger conveyer comprises a pair of guide rails provided in loop fashion to the transporting line so that the width spacing is gradually and smoothly reduced from the boarding end to the beginning of the high-speed zone and gradually and smoothly increased from the end of the high-speed zone to the disembarking end.
- the width spacing of the guide rails changes following a smooth curve, so acceleration of the pallets is reduced to a lower level, and the passengers on the pallets do not feel discomfort at time of acceleration or deceleration.
- the present invention provides a third variable-speed passenger conveyer, comprising: a plurality of pallets running in a linked state on a running rail formed in loop fashion over the entire area of the transporting line and return line; comb teeth provided to the side portion of each palette for joining with the adjacent palette; guide arms formed integrally with the base of the comb teeth at a certain angle and provided with a roller on the tip thereof; and stoppers with which the roller at the tip of the guide arm provided to the rear of the adjacent palette is engaged at the inversion portion of the transporting line.
- the rollers provided to the guide arm tips formed integrally with the comb teeth are restricted by the guard rail provided to the conveyer frame in the palette inversion portion, so there is no jutting of comb teeth.
- the present invention provides a fourth variable-speed passenger conveyer, comprising: a plurality of pallets running in a linked state on a running rail formed in loop fashion over the entire area of the transporting line and return line; comb teeth provided to the side portion of each palette for joining with the adjacent palette; guide arms formed integrally with the base of the comb teeth at a certain angle and provided with a roller on the tip thereof; and stoppers with which the roller at the tip of the guide arm provided to the rear of the adjacent palette is engaged at the inversion portion of the transporting line.
- the present invention provides a fifth variable-speed passenger conveyer according to the first variable-speed passenger conveyer, wherein the width of the walls of the guide rails restricting the right-angle movement of the guide rollers is formed so as to be wider in the acceleration zone wherein transition is made from the low-speed zone to the high-speed zone in the return line and in the deceleration zone wherein transition is made from the high-speed zone to the low-speed zone therein, than the width at other areas.
- the chain which is the link member is wrapped onto a circular sprocket
- the chain forms a regular polygon
- the sprocket rotates at a certain angle speed
- the rotational radius of the chain changes in cycles, so that the chain pulsates.
- the pallets of the variable-speed passenger conveyer according to the present invention are engaged by the driving chain in the high-speed zone of the transporting line and are transported, and are disengaged from the chain upon approaching the deceleration zone, pass through the deceleration zone, disembarking end, inversion portion, and acceleration zone of the return line, and are engaged with the chain once more.
- the engaging metal pieces of the pallets and the engaging position of the chain must each be synchronized at the time of engaging and disengaging the chain in the transporting line and return line.
- the running rail at the inversion portion and the guide rail at the acceleration/deceleration zones both have a certain curvature, and the corresponding pallets are linked members the same as the above-described chain.
- the linked length of the pallets and the linked length of the chains are not the same length, so the palette link member as viewed from the driving chain pulsates when transporting. Accordingly, "play" for adjusting the palette link length is necessary, for synchronizing the chain and pallets. This is also necessary for the section from the return line to the transporting line.
- the width of the walls of the guide rails restricting the right-angle movement of the acceleration zone guide rollers is formed so as to be wider that in other zones, thereby providing play in the rhombic state of the links, and ease of initial adjustment of the link circumference when installing the links is facilitated. Further, even in the event that the link length changes during extended operation, length adjustment is automatically performed within the section, thus enabling stable operation, and doing away with the need for specialized maintenance work.
- the present invention provides a handrail device for a variable-speed passenger conveyer.
- the present invention provides a handrail device, comprising: a running rail comprised of a passenger transporting line and a return line formed in a loop; a plurality of handrail pieces which move following the running rail; a standard guide rail formed in a loop in the same manner as the running rail; a side guide rail of which the spacing with the standard guide rail changes within a plane and is provided to acceleration/deceleration zones; links provided between the standard guide rail and the side guide rail in continuous V-formations; standard guide rollers linked to the end of the links toward the standard guide rail by the plurality of handrail pieces and engaging pieces; side guide rollers provided toward the side guide rail of the links; and driving chains provided with protrusions for engaging the engaging pieces of the handrail pieces so as to drive the handrail pieces, the driving chains being provided to the high-speed zone of the transport line and high-speed zone of the return line.
- driving of the handrail pieces of the passenger conveyer is performed by a driving chain provided between the transporting and return lines.
- the standard guide roller and the link axially bearing the standard guide roller, and the side guide roller axially borne by the link are guided by the standard guide rail and side guide rail and thus moved, creating a state of acceleration or deceleration of the handrail owing to change in spacing or the standard guide rail and side guide rail within a plane.
- the present invention provides a second handrail device according the first handrail device, wherein the spacing between the standard guide rail and side guide rail is formed to change smoothly at the acceleration/deceleration zones.
- the spacing between the standard guide rail and side guide rail is made to change smoothly within a plane, so acceleration (including negative acceleration) of the handrail pieces is reduced to a low level, and unnatural sensations when holding the handrail is diminished.
- the present invention provides a third handrail device for a variable-speed passenger conveyer according to the first handrail device, wherein a standard guide rail and side guide rail are provided to the transporting line and return line, except for the high-speed zone.
- an acceleration or deceleration state of the handrail pieces is created at the acceleration zone and the deceleration zone by means of changing the spacing between the standard guide rail and side guide rail. Also, the spacing between the standard guide rail and side guide rail is constant at the inverted portion, and inversion of the handrail occurs smoothly. Further, the function of the side guard rail is stopped at the high-speed zone, so interference action between the high-speed state owing to the driving chain and the high-speed state owing to the angle formed by the link is prevented, thus preventing grinding of the link and side guide rail.
- the present invention provides a fourth handrail device for a variable-speed passenger conveyer, according to the first handrail device, wherein guide rollers guided by a standard guide rail and a side rail are axially borne two set at a time by links; and wherein each guide roller is formed of convex flange-shaped portions and a convex hourglass-shaped portion; and wherein one inner side wall of the standard guide rail and the side guide rail is provided with a protrusion, the protrusion fitting with the hourglass-shaped portion of the guide roller and being formed with a curvature smaller than that of the hourglass-shaped portion of the guide roller, and arranged such that the center line of the guide roller passes through the standard line of the guide rail in the state of the apex of the protrusion and the bottom point of the hourglass-shaped portion of the guide roller meet; and wherein a gap is provided between the flange portions of the guide roller and both inner walls of the guide rail.
- guide rollers are axially borne two set at a time by links, thereby decreasing derailing, and greatly improving tracing of the guide rail.
- the present invention provides a fifth handrail device for a variable-speed passenger conveyer, according to the first handrail device, wherein the cross-section form of the side of the hourglass-shaped portion of the guide roller is arc-shaped, and the protrusion of the guide rail is arc-shaped.
- the cross-section form of the side of the hourglass-shaped portion of the roller is arc-shaped, thereby facilitating ease in manufacturing.
- the present invention provides a sixth handrail device according to the first handrail device, wherein adjustment of the length of the links is performed by providing a gap between the flange portion of the side guide roller and the side guide rail along the return line.
- adjustment of the length of the links is performed along the return line at the acceleration or deceleration zone, so adjustment can be easily performed at the initial setup.
- the present invention provides a seventh handrail device according to the first handrail device, wherein handrail pieces are provided toward the end side of the links and provided to the passenger transporting side.
- the standard rail is provided to the passenger side and a running rail is provided for supporting the handrail pieces, thus enabling providing to handrail pieces to the side of the passengers, thereby improving ease of the passengers holding the handrail pieces.
- Fig. 1 is a schematic side view of a transportation state of the variable-speed passenger conveyer according to the present invention.
- S1 is an acceleration zone from the boarding end to the high-speed zone
- S2 is a high-speed zone
- S3 is a deceleration zone from the high-speed zone to the disembarking end
- S4 is an inversion portion
- S5 is an acceleration zone
- S6 is a high-speed line the same as the above
- S7 is a deceleration zone
- S8 is an inversion portion.
- a pair of later-described guide rails of which the width spacing changes is provided to the aforementioned acceleration zones S1 and S5 and the deceleration zones S3 and S7.
- the width spacing in the inversion portions S4 and S8 is constant.
- the guide rails are not provided to the high-speed zones S2 and S6, but a chain 1 is provided for obtaining driving force.
- the driving mechanism of the pallets is comprised of the aforementioned chain 1 and a plurality of chain sprockets 2 for driving the chain 1, and force is transmitted to one of the chain sprockets 2 from a motor (not shown).
- Fig. 2 is a schematic plan view illustrating a deceleration state of the variable-speed passenger conveyer according to the present invention.
- Fig. 2 3 is a palette, and the palette is linked in a rhombic form with the adjacent palette by four links 4 mutually joined.
- 5 is an intermediate joint joining the links 4 from the preceding and trailing pallets 3 and 3, and the joints 6 and 6 to the side are structured to follow the change in width of the guide rails 7 and 7.
- the width of the guide rail 7 and 7 is formed so as to be gradually wider in the deceleration zone S3 from the high-speed zone S2 to the disembarking end or the deceleration zone S7 in the return line from the high-speed zone S6 to the inversion portion S4, so that the links 4 are moved in the direction of the joints 6 and 6 to either side such that the links 4 take on a closed rhombic form, and the spacing of the pallets 3 and 3 narrows as shown in the Figure, thus creating a state of deceleration.
- a pair of guide rails 7 and 7 are provided to the acceleration zone S1 from the boarding end to the high-speed zone or the acceleration zone S5 in the return line, and the guide rails 7 and 7 in the acceleration zones S1 and S5 are formed to narrow, opposite to the above description, so that the links 4 are moved in the inner direction of the joints 6 and 6 to either side such that the links 4 take on an open rhombic form, and the spacing of the pallets 3 and 3 spreads, thus creating a state of acceleration.
- Variable-speed passenger conveyers are different from conventional passenger conveyers in that the speed at the boarding and disembarking ends is low, and the speed at the intermediate portion is high. Accordingly, acceleration occurs as a matter of course at the acceleration/deceleration zones at which the speed changes from low speed to high speed, or from high speed to low speed. This acceleration affects the ease of ride of the passengers on the conveyer, and the greater the acceleration is, the greater the discomfort in ride of the passengers is. It is desirable that the acceleration generated at the acceleration/deceleration zones be as small as possible, i.e., that the acceleration in the acceleration/deceleration zones be a constant acceleration.
- the factor controlling the acceleration is the form of the guide rail 7. Accordingly, analyzing the change in acceleration of the pallets upon change of the form of the guide rail 7 is extremely important in optimal design of the acceleration of the pallets.
- Fig. 2 which illustrates the state of deceleration of the pallets 3 in the deceleration zone S3 of the variable-speed passenger conveyer according to the present invention
- 3 is a palette
- 4 is a link 5 is an intermediate joint
- 6 is a joint to the guide rail 7
- 7 and 7 are guide rails.
- a coordinates system (X, Y) is placed on the plane formed of the guide rail 7, 7 with X as the transportation direction of the conveyer and Y as the width direction of the conveyer.
- the function of a value obtained by subtracting half of the width of the intermediate joint 5 of the guide rail 7 from the value of the width orthogonal with the joint 6 from the center line in the Y direction is set as G (X).
- an approximate expression for the acceleration a(x) can be obtained by time-differentiation of Mathematical Expression 2, yielding the following Mathematical Expression 3.
- a ( x ) - v H 2 L 2 - G H 2 + K /2 L 2 - G ( x ) 2 + K /2 L 2 - G ( x ) 2 G ( x ) dG ( x ) dx
- G ij+1 represents G((X i+1 +X i )/2) .
- V i represents the i-th pallet speed.
- a i represents the i-th roller speed.
- Mathematical Expression 4 is used to asymptotically obtain the palette position X i .
- Mathematical Expression 5 and the palette position X i is used to asymptotically obtain the pallet speed V i .
- the guide form function G(X) must be a function which has at least a second-order derivative value of the guide form function G(X), i.e., at least a C 1 class continuous function.
- Fig. 3 is an explanatory diagram of the guide form function relating to the present invention, and shows a C 1 class continuous guide form function.
- the broken line is the basic design line of the guide comprised of line segments, and the solid line is the guide form function G(X).
- the GH area is the high-speed zone of the design line
- the GC area is the acceleration/deceleration zone of the design line
- the GL area is the low-speed zone of the design line.
- the guide form function G(X) Inserting arcs with a certain curvature radius to area boundary points GP1 and GP2 in the basic design line of the guide forms the guide form function G(X).
- the guide form function G(X) is a straight line
- the guide form function G(X) is an arc with a radius R.
- Fig. 4, Fig. 5, and Fig. 6 are graphs of the acceleration of the pallets.
- the speed V H of the palette in the high-speed zone is 1200 mm/s.
- the solid line represents the acceleration (numerical value solution) of the palette obtained using Mathematical Expression 6
- the broken line represents the acceleration (approximate solution) of the palette obtained using Mathematical Expression 3.
- R represents the acceleration of the palette at 10000 mm, 20000 mm, and 30000 mm.
- the numerical value solution vibrates (oscillates) with the approximate solution as the offset thereof.
- the greater R is, the smaller the maximum acceleration of the palette is, but the greater R is the greater the manufacturing cost is, so it is appropriate to set R 20000 mm from both perspectives of the maximum acceleration of the pallets and the manufacturing cost thereof.
- G*(X) which is obtained from the Mathematical Expression 7 and Mathematical Expression 8 is connected by C° class continuation at boundary points GP1a and GP2a with low-speed zone guide and high-speed zone guide, but is not connected by C 1 class continuation.
- This G*(X) cannot solve the numerical value solution of the acceleration of the palette in Mathematical Expression 6.
- the offset component of the acceleration of the palette is of a matter reduced, but the oscillating component becomes very great, and consequently, the minimum value of the maximum acceleration of the palette becomes extremely great.
- Mathematical Expression 11 v H 4 4 L 2 - G H 2 + K /2 4 GP 1 a GP 2 a d 2 dx 2 G *( x ) 2 - K L 2 - G ( x ) 2 2 dx ⁇ min
- Mathematical Expression 12 the right side of the first expression represents a third order spline function, x (i) represents the X coordinate of the control point of the guide optimal form function, and N represents the number of control points. Since the number of expression for boundary conditions in Mathematical Expression 10 is four, four control points N is sufficient, but in order to further minimize the maximum acceleration of the palette the number of control points N will be increased to six, and the conditions of the following Mathematical Expression 13 added to obtain a third order spline function.
- Fig. 7 is a graph representing the acceleration of the pallets.
- the speed V H of the pallets in the high-speed zone is 1200 mm/s.
- the solid line represents the acceleration (numerical value solution) of the pallets obtained using Mathematical Expression 6
- the broken line represents the acceleration (approximate solution) of the pallets obtained using Mathematical Expression 3.
- the approximate solution is constant in the intermediate range of the acceleration/deceleration zones.
- the numerical value solution vibrates (oscillates) with the approximate solution as the offset thereof.
- the one that corresponds with the acceleration graph of the palette in Fig. 7 is the acceleration graph of the palette in Fig. 5 (R 20000), and comparing Fig. 7 and Fig. 5, it can be understood that the acceleration of the palette in Fig. 7 is smaller.
- Fig. 8 is a partial enlarged side view illustrating the details of the driving mechanism of the pallets 3 in the high-speed zone S2 of the present invention. Only one palette 3 is shown, and the return line high-speed zone S6 is inverted vertically.
- the metal pieces 1a of the chain 1 sequentially engage the recessed portion 3b provided to the end of the engaging metal pieces of the pallets 3 from the bottom, thereby driving the pallets 3 in the transporting direction. Accordingly, the guide rails 7 and 7 are not present in the high-speed zones S2 and S6, the spacing in the transporting direction of the pallets 3 (transporting speed) is determined by the spacing of the metal pieces 1a of the chain, and the driving force of the entire palette 3 is provided at this position.
- 3c is comb teeth joined to the end portion of the palette 3, forming a bridging standing surface when the spacing of the pallets 3 is open.
- Fig. 9 is an arrow diagram of A in Fig. 8, the palette 3 being comprised of a standing surface 3d and frame 3e, with running rollers 30 being provided to both ends of the frame 3e.
- running rails 8a which are formed in a loop over the entire area of the transporting line and the return line are attached to the conveyer frame 8, so that the running rollers roll over the running rails 8a and support the weight of the passengers and so forth.
- a spline shaft 31 is attached to the rear of the palette 3 in the width direction orthogonal to the transporting direction, slide blocks 4a and 4a comprised of ball bearings and the like for joining the link 4 to the spline shaft 31 are provided, these sliding over the spline shaft 31, and forming the opening angle of the links 4.
- slide blocks 4a and 4a Provided below the slide blocks 4a and 4a are guide rollers 4b and 4b which fit the guide rails 7 and 7, but these do not function at high speed.
- the chain sprocket 2 is attached to the shaft 20, and the shaft 20 is supported by the bearings 8b and 8b of the conveyer frame.
- 21 is a force transmitting sprocket for transmitting force from a motor (not shown)
- 22 is a force transmitting sprocket for transmitting force to a variable-speed handrail (not shown) within the railing 23
- the bottom side of Fig. 9 indicates the return side of the palette 3.
- Fig. 10 is a bottom view of the attachment structure of the palette 3 and link 4 of the present invention as viewed from the rear side of the palette 4.
- Fig. 10 3 is pallets and 30 is 30 is running rollers.
- the right half is the state wherein the guide roller 4b slides along the spline shaft 31 due to restriction by the guide rail 7 and is moved toward the outside, making the opening angle of the links 4 to be acute, and bringing the pallets 4 into close proximity in the acceleration zones S1 and S5 and the deceleration zones S3 and S7 shown in Fig. 1.
- the left half is the state wherein the guide roller 4b slides along the spline shaft 31 and is moved toward the inside, by means of the pallets being separated by the chain 1 and metal pieces 1a shown in Fig. 8 engaging the recessed portion 3b of the engaging metal piece 3a, making the opening angle of the links 4 to be obtuse, in the high-speed zones S2 and S6.
- width determining material may be provided separately, in order to prevent margin of error of movement of the guide rollers 4b outwards.
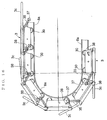
- Fig. 11 is a partial cross-view diagram illustrating one side of the passenger conveyer in the acceleration zones S1 and S5 and the deceleration zones S3 and S7 in Fig. 1 of the present invention, wherein running rollers 30 provided to the side of the palette 3 comprised of the standing surface 3d and frame 3e are structure to roll over running rails 8a formed on the conveyer frame 8, with guide rails 7 provided to the conveyer frame, and guide rollers 4b fit into the guide rails 7, so that the guide rollers 4b are integral with the slide blocks 4a sliding over the spline shaft 31 provided in the width direction of the palette 3.
- 32 is a bearing for the spline shaft 31, and is fixed to the frame 3e to the rear of the palette 3.
- 4 is a link axially borne by a vertical shaft 4c.
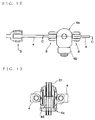
- Fig. 12 is a cross-sectional diagram along B-B in Fig. 11, wherein the links 4 and 4 are supported by the joint 6 so as to be horizontally rotatably supported to the side to the slide blocks 4a, and the other end of the link 4 is axially supported by the link 4 extending from the neighboring palette 3 and the intermediate joint 5.
- guide rollers 4b are axially supported at the bottom of the slide blocks 4a.
- Fig. 13 is a cross-sectional diagram along C-C in Fig. 12, showing the structure wherein slide blocks 4a are fit to the spline shafts 31 provided in the width direction of the palette 3, and ball bearings 4d are provided to the slide blocks 4a, so that smooth movement can be carried out to the spline shaft 31.
- Fig. 14 is a partial side view of the palette according to the present invention.
- 3c is comb teeth
- 3d is a standing surface
- running roller 30 and 30 being provided to both sides and the front and rear of the bottom of the bottom, these running rollers rolling on the running rails 8a.
- a roller 34 is provided to the upper rear portion of the palette 3 so that the comb teeth of the rear adjacent pallet smoothly engages the fixed comb teeth of the standing surface 3d and the load of the comb teeth 3c is supported at the transporting line.
- guide arms 35 are provided integrally to both sides of the comb teeth 3c with a certain angle ⁇ , so as to rotate with the shaft 36 as a central shaft, and further, rollers 37 are provided to the tips of the guide arms 35.
- the guide arms 35 and rollers 37 are for preventing jutting of the comb teeth 3c upon inversion of the palette 3.
- Fig. 15 is a side view illustrating the operation state when the palette 3 according to the present invention is inverted.
- Fig. 16 is a side view showing the operation state of another embodiment of means for preventing comb teeth 3c according to the present invention from flying outwards, in which a stopper 38 is provided to the real side of each palette 3, so that the roller 37 at the tip of the guide arm 35 formed integrally with the comb teeth 3c comes into contact and is restricted, thus preventing the comb teeth 3c from flying outwards.
- the means for preventing the comb teeth 3c from flying outwards are not restricted to variable-speed passenger conveyers, but can also be applied to conventional-type passenger conveyers wherein the conveyer moves from the boarding end to the disembarking end at a constant speed, and also, the driving means is not restricted to the embodiment.
- Fig. 17 shows an embodiment of the link adjusting mechanism according to the present embodiment, and is a bottom view from the rear of the palette 3.
- the link adjusting mechanism is provided to S5 (acceleration zone) or S7 (deceleration zone) in Fig. 1, with the Figure showing adjusting means of the link 4 system in S5 (acceleration zone).
- the passage path of the guide roller 4b within the guide rail 7 changes, i.e., the spacing of the pallets controlled by the width direction of the guide rollers 4b changes, and consequently the link length of the link 4 system is adjusted.
- Employing such means facilitates ease of adjusting the engaging timing with the palette 3 in S6 (high-speed zone) as to the pulsating to the link length of the link 4 system in the section from disengaging the chain in S2 (high-speed zone) and reengaging the chain in S6 (high-speed zone), and also, the link length of the link system during operation is automatically adjusted, so that transporting is performed smoothly.
- variable-speed conveyer it is possible to absorb the margin of error between the link length of a link system designed based on an ideal guide rail position and a link length determined by the position of the guide rail actually installed when assembling.
- the channel width of the guide rails 7 forms a "play section" which expands from L 1 to L 2 in the deceleration zone S5 which extends from the high speed zone S6 to the low-speed zone S4, and the returns to L 1 .
- the length of the section of play S a is calculated by the full circumference margin of error ⁇ L 12345678 of the palette 3 in each of the zones S1, S2, S3, S4, S5, S6, S7, and S8 (converted as the full-circumference margin of error in the high-speed zone) being obtained by calculating the amount of wobble of the guide roller 4b and width L 1 of the guide rails 7 and obtain the length of the section of play S a from this amount of wobble using Mathematical Expression 4.
- a certain length of section of play S a is decided upon beforehand, and the leeway of adjustment ⁇ L a of the palette 3 generated in each of the play zones S5 and S7 (converted as the leeway of adjustment in the high-speed zone) is obtained by calculating the amount of wobble of the guide roller and width L 2 of the guide rails 7 and obtain from this amount of wobble using Mathematical Expression 4.
- the leeway of adjustment ⁇ L a of the palette 3 is obtained while changing the length of the section of play S a .
- the full circumference margin of error ⁇ L 12345678 of the palette 3 is multiplied by a safety ratio S to yield the full circumference margin of error ⁇ L of the palette 3. If the length of the section of play S a is such that the following Mathematical Expression 15 holds, this means that there is sufficient leeway in the play section. ⁇ L a ( S a ) ⁇ L
- the present invention is as described above, and has the following advantages:
- Fig. 18 is a schematic enlarged side view of the railing portion to which are provided the handrail pieces of the variable-speed passenger conveyer according to the present invention, wherein the transporting line A is comprised of an acceleration zone S1 in which the handrail piece is gradually accelerated from the boarding end, a high-speed zone S2, and a deceleration zone S3 in which the handrail piece is gradually decelerated toward the disembarking end.
- the transporting line A is comprised of an acceleration zone S1 in which the handrail piece is gradually accelerated from the boarding end, a high-speed zone S2, and a deceleration zone S3 in which the handrail piece is gradually decelerated toward the disembarking end.
- the return line B is comprised of an inversion portion S4 at which the handrail is inverted, an acceleration zone S5, a high-speed zone S6, a deceleration zone S7 in which the handrail piece is gradually decelerated, and an inversion portion S8 heading toward the boarding end.
- a driving chain 101 is provided to the high-speed zone S2, and the handrail piece is driven at high speed by sprockets 102.
- One of the sprockets 102 has the same motor as an unshown sprocket of the lower pallet transporting line, and is driven synchronously with the high speed of the pallets.
- Fig. 19 is a schematic plan view of a guide rail for decreasing the speed of the handrail pieces provided to the deceleration zones S3 and S7 according to the present invention.
- 103 is a handrail piece
- 104 is a running rail for guiding the handrail piece, with the running rail 104 being provided in loop fashion over the entire area of the transporting line A in Fig. 18 and the return line B thereof.
- the standard guide rail 105 is a standard guide rail also provided to the running rail 104, with the standard guide rail 105 also being provided in loop fashion over the entire area of the transporting line A and the return line B as with the running rail 104.
- 106 is a side guide rail, the spacing thereof with the standard guide rail changing in the acceleration/deceleration zones S1, S3, S5, and S7, and this spacing being the same at the inversion portions S4 and S8. Incidentally, there are no side guide rails 106 provided to the high-speed zones S2 and S6.
- 107 is a link, and these links are formed in V-shaped arrangements between the standard guide rail 105 and the side guide rail 106 in a continuous manner over the entire range of the transporting line and the return line in a loop.
- a standard guide roller 108 engaged with the handrail piece 103, and provided to the side toward the side guide rail 106 is a side guide roller 109, with each being guided by the standard guide rail 105 and the side guide rail 106.
- the side guide rail 106 is provided so that the spacing with the standard guide rail 105 gradually increases toward the transporting direction (arrow). Accordingly, the angle formed alternately by the links 107 becomes an acute angle as the spacing between the standard guide rail 105 and the side guide rail 106 increases, the spacing between the handrail pieces 103 and 103 becomes closer, and thus a low-speed state can be created.
- the spacing between the side guide rail 106 and the standard guide rail 105 gradually narrows toward the transporting direction, conversely, and the angle formed alternately by the links 107 with the handrail pieces being moved in that state becomes an obtuse angle, the spacing between the handrail pieces 103 and 103 increases, and thus a high-speed state can be created.
- Variable-speed passenger conveyers are different from conventional passenger conveyers in that the speed at the boarding and disembarking ends is low, and the speed at the intermediate portion is high. Accordingly, acceleration occurs as a matter of course at the acceleration/deceleration zones at which the speed changes from low speed to high speed, or from high speed to low speed. This acceleration affects the ease of ride of the passengers on the conveyer, and the greater the acceleration is, the greater the discomfort in ride of the passengers is. It is desirable that the acceleration generated at the acceleration/deceleration zones be as small as possible, i.e., that the acceleration in the acceleration/deceleration zones be a constant acceleration. Also, it is desirable that the position relation of the conveyer portion and the handrail portion match, meaning that the handrail portion must have the same acceleration as the conveyer portion.
- the factor controlling the acceleration is the form of the side guide rail.
- a coordinate system (X, Y) is placed on a plane formed of the standard guide rail 105 and side guide rail 106, with the width factor of the side guide rail 106 as viewed from the standard guide rail 105 (i.e., side guide form function) as G (X).
- an approximate expression for the acceleration a(x) can be obtained by time-differentiation of Mathematical Expression 17, yielding the following Mathematical Expression 18.
- G i,i+1 represents G((X i+1 +X i )/2) .
- Mathematical Expression 20 V i represents the i-th roller speed.
- a i represents the i-th roller speed.
- Mathematical Expression 19 is used to asymptotically obtain the roller position X i .
- Mathematical Expression 20 and the roller position X i is used to asymptotically obtain the roller speed V i .
- roller position X i , and roller speed V i are used to asymptotically obtain the roller acceleration a i .
- the side guide form function G(X) must be a function which has at least a second-order derivative value of the side guide form function G(X), i.e., at least a C 1 class continuous function.
- Fig. 20 shows a C 1 class continuous side guide form function.
- the broken line is the basic design line of the guide comprised of segments, and the solid line is the side guide form function G(X).
- the GH area is the high-speed zone of the design line
- the GC area is the acceleration/deceleration zone of the design line
- the GL area is the low-speed zone of the design line.
- Fig. 21, Fig. 22, and Fig. 23 represent graphs of the acceleration of the handrail pieces.
- the speed V H of the handrail piece in the high-speed zone is 1200 mm/s.
- the solid line represents the acceleration (numerical value solution) of the handrail piece obtained using Mathematical Expression 21, and the broken line represents the acceleration (approximate solution) of the handrail piece obtained using Mathematical Expression 18.
- R represents the acceleration of the handrail piece at 10000 mm, 20000 mm, and 30000 mm.
- G*(X) which is obtained from the Mathematical Expression 22 and Mathematical Expression 23 is connected by C 0 class continuation at boundary points GP1a and GP2a with low-speed zone guide and high-speed zone guide, but is not connected by C 1 class continuation.
- This G*(X) cannot solve the numerical value solution of the acceleration of the handrail piece in Mathematical Expression 21.
- the offset component of the acceleration of the handrail piece is of a matter reduced, but the oscillating component becomes very great, and consequently, the minimum value of the maximum acceleration of the handrail piece becomes extremely great.
- Mathematical Expression 18 Substituting Mathematical Expression 18 into a(x) in Mathematical Expression 24 yields the following Mathematical Expression 26: v H 4 4( L 2 - G H 2 ) 2 GP 1 a GP 2 a d 2 G *( x ) 2 dx 2 2 dx ⁇ min
- Mathematical Expression 27 the right side of the first expression represents a third order spline function
- x (i) represents the X coordinate of the control point of the side guide optimal form function
- N represents the number of control points. Since the number of expression for boundary conditions in Mathematical Expression 25 is four, four control points is sufficient, but in order to further minimize the maximum acceleration of the handrail the number of control points N will be increased to six, and the conditions of the following Mathematical Expression 28 added to obtain a third order spline function.
- d 2 dx 2 G *( GP 1 b ) 2 0
- d 2 dx 2 G *( GP 2 b ) 2 0
- Fig. 24 is a graph representing the acceleration of the handrail pieces.
- the speed V H of the handrail piece in the high-speed zone is 1200 mm/s.
- the solid line represents the acceleration (numerical value solution) of the handrail piece obtained using Mathematical Expression 21
- the broken line represents the acceleration (approximate solution) of the handrail piece obtained using Mathematical Expression 18.
- the approximate solution is constant in the intermediate range of the acceleration/deceleration zones.
- the numerical value solution vibrates (oscillates) with the approximate solution as the offset thereof.
- Fig. 25 is a schematic plan view of another embodiment of the aforementioned link 107 according to the present invention.
- the link 107 is linked from the standard guide rail 5 (the side toward the handrail piece 103) to the side guide rail 106 and standard guide rail 105 in a V-shape.
- the width of the handrail is increased somewhat, but acceleration/deceleration of the handrail pieces 103 can be performed.
- the speed of the hand rail piece 103, approximate solution of acceleration, numerical value solution, and the side guide rail design method, described in the embodiment shown in Fig. 19, can be used.
- Fig. 26 is a schematic plan view of another embodiment of the link 107 according to the present invention.
- K represents the average length of link members 108a, 108a', and 109a.
- Mathematical Expression 31 is an approximate expression for the speed V(x) of the handrail piece 103.
- v ( x ) L 2 - G ( x ) 2 + K L 2 - G H 2 + K v H
- Mathematical Expression 34 L 2 - G i , i +1 2 - G i , i +1 dG i , i +1 dx L 2 - G i , i +1 2 + G i , i +1 dG i , i +1 dx v i
- Mathematical Expression 33 is used to asymptotically obtain the link member position X i .
- Mathematical Expression 34 is used to asymptotically obtain the link member position V i .
- Mathematical Expression 35, link member position X i , and link member speed V i are used to asymptotically obtain the link member acceleration a i .
- Mathematical Expression 38 v H 4 4 L 2 - G H 2 + K 4 GP 1 a GP 2 a d 2 dx 2 G *( x ) 2 +2 K L 2 - G *( x ) 2 2 dx ⁇ min
- Mathematical Expression 39 the right side of the first expression represents a third order spline function
- x (i) represents the X coordinate of the control point of the side guide optimal form function
- N represents the number of control points. Since the number of expression for boundary conditions in Mathematical Expression 37 is four, four control points is sufficient, but in order to further minimize the maximum acceleration of the handrail the number of control points N will be increased to six, and the conditions of the following Mathematical Expression 40 added to obtain a third order spline function.
- Fig. 27 is a side view illustrating the engagement relation between the driving chain 101 for high-speed driving in the high-speed zone S2 shown in Fig. 18 and the handrail piece 103.
- 101 is a driving chain, and 101a is a protrusion provided to the chain 101 at certain intervals.
- 110 is an engaging metal piece of which the other end engages the handrail piece 103, the recessed portion 110a of the engaging metal piece 110 engaging with a roller 101b of the protrusion 101a of the chain 101, being driven by driving of a sprocket 102.
- the intermediate portion of the engaging metal piece 110 is integrally attached to the link member 108a of the standard guide rollers 108 and 108, and the other end is engaged with a metal piece 103a of the handrail piece 103 by a roller 110b provided thereto.
- 105 is a standard guide rail, for guiding the standard guide rollers 108 and 108.
- 104 is a running rail for the handrail piece 3, and causes the handrail piece 103 to run by means of running rollers 103b and 103c which are attached to the handrail piece 103.
- the high-speed zone S6 in Fig. 18 is also of a similar engaging construction.
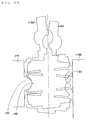
- Fig. 28 is a cross-section of line A-A in Fig. 27, and is a cross-sectional diagram of the handrail device of the variable-speed passenger conveyer according to the present invention.
- 103 is a handrail piece
- 103b and 103c are running rollers which are supported by the handrail piece 103 and are provided so as to pinch a running rail 104 from above and below, constructed so as to prevent wobbling of the handrail piece 103.
- the handrail piece 103 is provided to the transporting A side toward the passengers, and is situated in an offset manner such that the passengers can easily grasp it.
- 105 is a standard guide rail
- 106 is a side guide rail. Both guide rails 105 and 106 are integrally formed at portions where spacing is narrow, with a rounded protruding portion formed to the side thereof, and both are formed separately at portions where spacing is wide.
- the driving chain 101 determines the spacing of the handrail pieces 103 and 103 in order to createahigh-speed state. Accordingly, the aforementioned side guide rail 106 does not need to be operated, and only receive the side guide roller 109 only for supporting the link 107, so a certain amount of wobble is preferable.
- the 110 is an engaging metal piece, and is engages the handrail piece 103 and is linked with the link member 108a of the standard guide rollers 108 and 108, and further engages the protrusions 101a of the driving chain 101.
- the standard guide roller 108 having an hourglass-shaped portion corresponding with the rounded form of the protruding portion of the side of the aforementioned standard guide rail 105, and is axially borne by the link 107 by a spherical bearing 107a.
- 105a is a supporting table for the standard guide rail 105
- 105b is a guard member for restricting movement of the side guide roller 109 outwards.
- the upper and lower flanges 108b and 108c of the standard guide roller 108 roll against the guard member 105b and standard guide rail 105.
- the side guide roller 109 is axially borne by the other end of the link 107 with a spherical bearing 107b, and the hourglass portion of the side guide roller 109 fits the rounded protruding portion of to the side of the side guide rail 106 as described above.
- Axially supporting the link 107, standard guide roller 108, and side guide roller 109 with a spherical bearing is advantageous in that there is no interference between the link 107 and the standard guide rail 105 and side guide rail 106 at the inverted portions S4 and S8.
- the side guide rail 106 is comprised of a supporting member 106a and guard member 105b, and the inner side of the side guide rail 106 and guard member 105b roll against the upper and lower flanges 109a and 109b of the side guide roller 109.
- the aforementioned supporting member 106a serves as an adjusting member for determining the adjustment leeway of the circumference of the links 107 at the acceleration/deceleration zones S5 and S7 of the return line.
- variable-speed passenger conveyers it is necessary to provide link systems which use links 107 such as described above for changing speed with means for forming adjustment leeway of the circumference of the links 107.
- the sideways width of the supporting member 106a provided to the acceleration zone S5 and deceleration zone S7 of the return line is wide, and the distance between the standard guide rail 105 and side guide rail 106 is narrow, thus provided some "play" so as to form adjustment leeway for the circumferential length of the link 107.
- 111 is a conveyer frame
- the sprocket 102 for driving the driving chain 101 is axially borne by the conveyer frame 111 by a shaft 102'.
- 112 and 113 are frame covers.
- the drawing in broken lines to the right of Fig. 28 is a supposed drawing illustrating the positional relation of the side roller 109 at the point that the side guide rail 106 is widest, i.e., at the point of deceleration.
- Fig. 29 is a single view drawing illustrating the movement of the side guide roller 109 in the side guide rail 106 and guard member 105b.
- 109d and 109e are profiles of the side guide roller 109.
- internal force of the link 107 acts upon the spherical bearing 107b, so the side guide roller 109 tilts as shown by the profiles 109d and 109e as to the design standard line of the standard guide roller which is indicated by a single-dot broken line as shown in the Figure. This is also true for the standard guide rail 105.
- the distance between the handrail pieces 103 and 103 undesirably includes a margin of error as to the certain design value.
- the height of the guide rail and the guide member is made to be at least the height of the guide roller flange portion.
- the side form of the upper flange 108b and 109b and the lower flange 108c and 109c of the guide rollers 108 and 109 has been made to be a convex curved plane (arc), so as to facilitate ease of rolling upon rolling contact.
- the protrusion 160 of the guide rail 106 is set such that the center line of the guide roller 109 becomes the design standard line at the point that the apex of the concave arc of the guide roller and the apex of the convex arc of the guide rail meet, so that the guide roller 109 tilts with the center thereof as the axis.
- the side form of the protrusions of the aforementioned standard guide rail 105 and the side guide rail 106 is by no means limited to a rounded form; rather, this may be a form with straight sides.
- Fig. 30 is a single view drawing illustrating the movement of the side guide roller 109 in the side guide rail 106 and guard member 106b in the section with "play".
- the side guide roller 109 tilts greatly in the side guide rail 106 and guard member 106b with the design standard line as the center thereof. This great tilting generates leeway for adjustment of the distance between the handrail pieces 103 and 103.
- the protrusion 160 of the guide rail is set such that the center line of the guide roller becomes the design standard line at the point that the apex of the concave arc of the hourglass-shaped portion 190 of the guide roller and the apex of the convex arc of the protrusion 160 of the guide rail meet, so that the guide roller tilts with the center thereof as the axis.
- the full circumference margin of error ⁇ L 12345678 of the handrail piece 103 in each of the zones S1, S2, S3, S4, S5, S6, S7, and S8 (converted as the full-circumference margin of error in the high-speed zone) is obtained by using mechanism analysis means such as shown in Fig. 29 to calculate the amount of wobble of the guide roller and obtain the full circumference margin of error from this amount of wobble (Mathematical Expression 33).
- a certain length of section of play S a is decided upon beforehand, and the leeway of adjustment ⁇ L a of the handrail piece 103 in each of the play zones S5 and S7 (converted as the leeway of adjustment in the high-speed zone) is obtained by using mechanism analysis means such as shown in Fig. 30 to calculate the amount of wobble of the guide roller and obtain the leeway of adjustment from this amount of wobble (Mathematical Expression 33).
- the leeway of adjustment ⁇ L a of the handrail piece 103 is obtained while changing the length of the section of play S a .
- the minimum section of play S a in which the Mathematical Expression 42 holds is the limit for the length of the section with play.
- Fig. 31 is a partial flat cross-section view of the variable-speed passenger conveyer handrail device according to the present invention.
- 103 is a handrail piece
- 114 is a handrail cover provided between the handrail pieces 103 and 103, and is formed of a flexible material such as accordion bellows form, capable of withstanding the separation distance of the handrail pieces 103 and 103.
- the standard guide rollers 108 and 108 at the end of the links 107 are axially supported by the link member 108a and guided by the standard guide rail 105, and the side guide rollers 109 and 109 at the other end of the links 107 are axially supported by the link member 109a and guided by the side guide rail 106. Further, the guide rollers 108' and 108' at the handrail cover 114 portion are linked by a same link member 108a'.
- the standard guide rollers 108 and 108 and the side guide rollers 109 and 109 are provided in units of two set, improving tracing of the standard guide rail 105 and side guide rail 106, and also doing away with derailing.
- Fig. 32 is a side view of the variable-speed passenger conveyer handrail device according to the present invention as viewed from the railing side, with an offset provided between the handrail piece 103 and handrail cover 114, so that the passengers can grasp the handrail piece 103 in a sure manner.
- the present invention is as described above, and has the following advantages:
Landscapes
- Escalators And Moving Walkways (AREA)
Abstract
A variable-speed passenger conveyer comprises a pair of guide rails
(7) provided in loop fashion to the transporting line; a chain (1) which
engages the pallets at the high-speed zone and drives the pallets; and
link members for linking the palettes. A handrail device comprises a
running rail formed in a loop in a passenger transporting line and a
return line; and a plurality of handrail pieces which move following
said running rail.
Description
- The present invention relates to a passenger conveyer such as a moving sidewalk or an escalator and a handrail apparatus therefor, and particularly to a variable-speed passenger conveyer wherein the movement speed of the pallets is changed between the boarding and disembarking ends and a handrail apparatus therefor.
- Passenger conveyers which transport passengers without causing the passengers to walk have recently been widely installed in airports, train stations, tourist areas, and so forth.
- The majority of such conventional passenger conveyers is such wherein the speed is constant from the boarding end to the disembarking end. The speed at the boarding end to the disembarking end needs to be set at 50 meters per minute or less in order to maintain safety, and the speed remains constant from the boarding end to the disembarking end.
- However, there are passenger conveyers which have been installed for access to urban mass transit facilities, some of which are long, and there is strong demand for increase in the speed thereof at the intermediate area thereof.
- Accordingly, there have been proposed variable-speed passenger conveyers arranged such that the speed at the boarding end is the aforementioned speed, the speed then gradually accelerating to a higher speed at the intermediate area, and then gradually decelerating to the same speed at the disembarking end, thereby maintaining the safety of passengers boarding and disembarking, but the majority of such variable-speed passenger conveyers has involved an arrangement of changing the spacing of the pallets to change the speed.
- A proposal for a variable-speed passenger conveyer is disclosed in Japanese Unexamined Patent Publication No. 49-43371 as a "variable-speed driving apparatus", wherein the height of a triangular belt link linked to a carriage and two pallets running along a rail which changes in height in the direction of progression, thereby changing the pallet spacing.
- However, the art disclosed in the above Patent Publication has the following problems.
- (1) The rail height rapidly changes and the acceleration of the pallets temporarily becomes extremely great, giving the passengers on the pallets a sense of discomfort.
- (2) The structure is complex, the space occupied by the structure underneath the pallets is great, and facility costs are high.
- (3) The belt link is flexible, so it is difficult to precisely set the pallet spacing, and belt stretching occurs during operation, deteriorating comfort in riding.
- (4) The belt link is flexible, so operation must perpetually be made with a pulling load applied thereto, and in the event that the traction force is small or a compression load occurs, the structure system does not function.
-
- On the other hand, there is the need to make the movement speed of the handrails variable, in addition to making the pallets variable in speed.
- A proposal to make the handrails variable in speed is known in Japanese Unexamined Patent Publication No. 57-98481.
- The structure of the handrail described in the Patent Publication involves loop-shaped guide rails to be provided to the outer side and inner side within a vertical plane, wherein the spacing of the outer and inner guide rails is narrowed at the high speed zone and widened at the boarding and disembarking ends. Provided to the outer guide rail is a handrail piece stretchably linked in the direction of transportation via the outer guide roller, and provided to the inner guide rail is an inner guide roller which is moved by means of being engaged with claws on a high-speed driving chain.
- Further, the front and back of the handrail piece and an inner guide roller are linked by a V-shaped link provided within a vertical plane.
- In the above construction, at the point that the inner guide roller is driven by the driving chain, the angle of the link is an acute angle at the at the boarding and disembarking ends, due to the spacing between the outer and inner guide rails being great thereat, thus narrowing the spacing between the handrail pieces and creating a state of low speed for the handrails.
- Also, the angle of the link is an obtuse angle at the at the intermediate high-speed zone, due to the spacing between the outer and inner guide rails being narrow thereat, thus widening the spacing between the handrail pieces and creating a state of high speed for the handrails.
- However, the aforementioned conventional art has the following problems:
- (1) The link is provided in a V-shape within a vertical plane, so transmission of force is difficult at the handrail inversion portion, and there is the problem of interference between the inner rail guide roller and handrail and link.
- (2) There are two factors operating on the opening angle of the link at the high-speed zone, namely, the position determining operation due to the claw spacing of the driving chain, and the opening operation due to change in the inner and output guide rail spacing, so there is the problem that both operations interfere with one another and smooth movement speed of the handrail pieces cannot be obtained.
- (3) There are no means for adjusting the circumference of the link (the length in the transporting direction), so mounting and adjusting the link is difficult, and further, it is difficult to engage the claws of the driving chain with the upper and lower portions of the inner rail guide roller.
- (4) The structure is such that the shafts of the link linkage portions, the inner rail guides roller, etc., are axially borne by the outer/inner guide rail, so the shaft bearing structure is unstable.
-
- It is an object of the present invention to provide a variable-speed passenger which reduces the acceleration of the pallets as much as possible, is simple in structure, and wherein adjustment can be made automatically.
- It is another object of the present invention to provide a handrail device for a variable-speed passenger conveyer which allows for stable motion.
- First, to attain the object, the present invention provides a first variable-speed passenger conveyer which changes the transporting speed in the section between the boarding end and disembarking end by changing the spacing of pallets. The first variable-speed passenger conveyer comprises: a pair of guide rails provided in loop fashion to the transporting line so that the width spacing is gradually reduced from the boarding end to the beginning of the high-speed zone and gradually increased from the end of the high-speed zone to the disembarking end; a chain which engages the pallets at the high-speed zone and drives at high speed; a guide roller which is guided by an engaging metal piece at the bottom portion engaging the chain and by the pair of guide rails; pallets provided with a spline shaft for sliding the guide roller in a right-angle direction with the transporting direction; and link members linking in a planar rhombic form the guide roller and the guide roller of the palette adjacent to the guide roller via intermediate joints.
- The movement speed of the pallets changes at the boarding end and disembarking end owing to change in the width of the guide rail, so acceleration and deceleration is smooth, and safety is maintained.
- Secondly, the present invention provides a second variable-speed passenger conveyer according to the first variable-speed passenger conveyer. The second variable-speed passenger conveyer comprises a pair of guide rails provided in loop fashion to the transporting line so that the width spacing is gradually and smoothly reduced from the boarding end to the beginning of the high-speed zone and gradually and smoothly increased from the end of the high-speed zone to the disembarking end.
- According to the second variable-speed passenger conveyer, the width spacing of the guide rails changes following a smooth curve, so acceleration of the pallets is reduced to a lower level, and the passengers on the pallets do not feel discomfort at time of acceleration or deceleration.
- Thirdly, the present invention provides a third variable-speed passenger conveyer, comprising: a plurality of pallets running in a linked state on a running rail formed in loop fashion over the entire area of the transporting line and return line; comb teeth provided to the side portion of each palette for joining with the adjacent palette; guide arms formed integrally with the base of the comb teeth at a certain angle and provided with a roller on the tip thereof; and stoppers with which the roller at the tip of the guide arm provided to the rear of the adjacent palette is engaged at the inversion portion of the transporting line.
- According to the third variable-speed passenger conveyer, the rollers provided to the guide arm tips formed integrally with the comb teeth are restricted by the guard rail provided to the conveyer frame in the palette inversion portion, so there is no jutting of comb teeth.
- Fourthly, the present invention provides a fourth variable-speed passenger conveyer, comprising: a plurality of pallets running in a linked state on a running rail formed in loop fashion over the entire area of the transporting line and return line; comb teeth provided to the side portion of each palette for joining with the adjacent palette; guide arms formed integrally with the base of the comb teeth at a certain angle and provided with a roller on the tip thereof; and stoppers with which the roller at the tip of the guide arm provided to the rear of the adjacent palette is engaged at the inversion portion of the transporting line.
- According to the fourth variable-speed passenger conveyer, the rollers provided to the guide arm tips formed integrally with the comb teeth engage the stopper of the preceding palette in the palette inversion portion, so there is no jutting of comb teeth.
- Fifthly, the present invention provides a fifth variable-speed passenger conveyer according to the first variable-speed passenger conveyer, wherein the width of the walls of the guide rails restricting the right-angle movement of the guide rollers is formed so as to be wider in the acceleration zone wherein transition is made from the low-speed zone to the high-speed zone in the return line and in the deceleration zone wherein transition is made from the high-speed zone to the low-speed zone therein, than the width at other areas.
- For example, it is known that in the state that the chain which is the link member is wrapped onto a circular sprocket, the chain forms a regular polygon, and in the case that the sprocket rotates at a certain angle speed, the rotational radius of the chain changes in cycles, so that the chain pulsates. The pallets of the variable-speed passenger conveyer according to the present invention are engaged by the driving chain in the high-speed zone of the transporting line and are transported, and are disengaged from the chain upon approaching the deceleration zone, pass through the deceleration zone, disembarking end, inversion portion, and acceleration zone of the return line, and are engaged with the chain once more. Accordingly, the engaging metal pieces of the pallets and the engaging position of the chain must each be synchronized at the time of engaging and disengaging the chain in the transporting line and return line. However, the running rail at the inversion portion and the guide rail at the acceleration/deceleration zones both have a certain curvature, and the corresponding pallets are linked members the same as the above-described chain. Also, the linked length of the pallets and the linked length of the chains are not the same length, so the palette link member as viewed from the driving chain pulsates when transporting. Accordingly, "play" for adjusting the palette link length is necessary, for synchronizing the chain and pallets. This is also necessary for the section from the return line to the transporting line.
- Also, it is necessary to deal with change in link circumferential length accompanying change in pallet spacing due to warping of the rhombic form of the links owing to margin of error in installation of the guide rail.
- Conversely, according to the fifth variable-speed passenger conveyer, the width of the walls of the guide rails restricting the right-angle movement of the acceleration zone guide rollers is formed so as to be wider that in other zones, thereby providing play in the rhombic state of the links, and ease of initial adjustment of the link circumference when installing the links is facilitated. Further, even in the event that the link length changes during extended operation, length adjustment is automatically performed within the section, thus enabling stable operation, and doing away with the need for specialized maintenance work.
- Further, the present invention provides a handrail device for a variable-speed passenger conveyer.
- First, the present invention provides a handrail device, comprising: a running rail comprised of a passenger transporting line and a return line formed in a loop; a plurality of handrail pieces which move following the running rail; a standard guide rail formed in a loop in the same manner as the running rail; a side guide rail of which the spacing with the standard guide rail changes within a plane and is provided to acceleration/deceleration zones; links provided between the standard guide rail and the side guide rail in continuous V-formations; standard guide rollers linked to the end of the links toward the standard guide rail by the plurality of handrail pieces and engaging pieces; side guide rollers provided toward the side guide rail of the links; and driving chains provided with protrusions for engaging the engaging pieces of the handrail pieces so as to drive the handrail pieces, the driving chains being provided to the high-speed zone of the transport line and high-speed zone of the return line.
- According to the first handrail device, driving of the handrail pieces of the passenger conveyer is performed by a driving chain provided between the transporting and return lines.
- Due to the handrail pieces moving, in the acceleration zone, the standard guide roller and the link axially bearing the standard guide roller, and the side guide roller axially borne by the link are guided by the standard guide rail and side guide rail and thus moved, creating a state of acceleration or deceleration of the handrail owing to change in spacing or the standard guide rail and side guide rail within a plane.
- Also, directly moving the handrail pieces with the driving chain in the high-speed zone of the transporting line and in the high-speed zone of the return line changes the spacing between the handrail pieces, thus creating a high-speed state.
- Secondly, the present invention provides a second handrail device according the first handrail device, wherein the spacing between the standard guide rail and side guide rail is formed to change smoothly at the acceleration/deceleration zones.
- According to the second handrail device, the spacing between the standard guide rail and side guide rail is made to change smoothly within a plane, so acceleration (including negative acceleration) of the handrail pieces is reduced to a low level, and unnatural sensations when holding the handrail is diminished.
- Thirdly, the present invention provides a third handrail device for a variable-speed passenger conveyer according to the first handrail device, wherein a standard guide rail and side guide rail are provided to the transporting line and return line, except for the high-speed zone.
- According to the third handrail device, an acceleration or deceleration state of the handrail pieces is created at the acceleration zone and the deceleration zone by means of changing the spacing between the standard guide rail and side guide rail. Also, the spacing between the standard guide rail and side guide rail is constant at the inverted portion, and inversion of the handrail occurs smoothly. Further, the function of the side guard rail is stopped at the high-speed zone, so interference action between the high-speed state owing to the driving chain and the high-speed state owing to the angle formed by the link is prevented, thus preventing grinding of the link and side guide rail.
- The present invention provides a fourth handrail device for a variable-speed passenger conveyer, according to the first handrail device, wherein guide rollers guided by a standard guide rail and a side rail are axially borne two set at a time by links; and wherein each guide roller is formed of convex flange-shaped portions and a convex hourglass-shaped portion; and wherein one inner side wall of the standard guide rail and the side guide rail is provided with a protrusion, the protrusion fitting with the hourglass-shaped portion of the guide roller and being formed with a curvature smaller than that of the hourglass-shaped portion of the guide roller, and arranged such that the center line of the guide roller passes through the standard line of the guide rail in the state of the apex of the protrusion and the bottom point of the hourglass-shaped portion of the guide roller meet; and wherein a gap is provided between the flange portions of the guide roller and both inner walls of the guide rail.
- According to the fourth handrail device, guide rollers are axially borne two set at a time by links, thereby decreasing derailing, and greatly improving tracing of the guide rail.
- Fifthly, the present invention provides a fifth handrail device for a variable-speed passenger conveyer, according to the first handrail device, wherein the cross-section form of the side of the hourglass-shaped portion of the guide roller is arc-shaped, and the protrusion of the guide rail is arc-shaped.
- According to the fifth handrail device, the cross-section form of the side of the hourglass-shaped portion of the roller is arc-shaped, thereby facilitating ease in manufacturing.
- The present invention provides a sixth handrail device according to the first handrail device, wherein adjustment of the length of the links is performed by providing a gap between the flange portion of the side guide roller and the side guide rail along the return line.
- According to the sixth handrail device, adjustment of the length of the links is performed along the return line at the acceleration or deceleration zone, so adjustment can be easily performed at the initial setup.
- Seventhly, the present invention provides a seventh handrail device according to the first handrail device, wherein handrail pieces are provided toward the end side of the links and provided to the passenger transporting side.
- According to the seventh handrail device, even in the event that links are provided in a planar fashion, the standard rail is provided to the passenger side and a running rail is provided for supporting the handrail pieces, thus enabling providing to handrail pieces to the side of the passengers, thereby improving ease of the passengers holding the handrail pieces.
-
- Fig. 1 is a schematic side view of a transportation state of the variable-speed passenger conveyer according to the present invention.
- Fig. 2 is a schematic plan view illustrating a deceleration state of the variable-speed passenger conveyer according to the present invention in the deceleration zone S3.
- Fig. 3 is an explanatory diagram of the guide form function relating to the present invention.
- Fig. 4 is a graph of the acceleration of the palette relating to the present invention (R10000).
- Fig. 5 is a graph of the acceleration of the palette relating to the present invention (R20000).
- Fig. 6 is a graph of the acceleration of the palette relating to the present invention (R30000).
- Fig. 7 is a graph of the acceleration of the palette relating to the present invention (third power spline function).
- Fig. 8 is a partial enlarged side view illustrating the details of the driving mechanism of the palette in the high-speed zone S2 of the present invention.
- Fig. 9 is an arrow diagram of A in Fig. 8.
- Fig. 10 is a bottom view of the attachment structure of the palette and link of the present invention as viewed from the rear side of the palette.
- Fig. 11 is a partial cross-view diagram of the passenger conveyer in the acceleration zone S1 and deceleration zone S2 of the present invention.
- Fig. 12 is a cross-sectional diagram along B-B in Fig. 11.
- Fig. 13 is a cross-sectional diagram along B-B in Fig. 12.
- Fig. 14 is a side view of a palette according to the present invention.
- Fig. 15 is a side view illustrating the operation state when the palette according to the present invention is inverted.
- Fig. 16 is a side view showing the operation state of another embodiment according to the present invention of means for preventing comb teeth from flying outwards.
- Fig. 17 shows an embodiment of the link adjusting mechanism according to the present embodiment, and is a bottom view from the rear of the palette.
- Fig. 18 is a schematic side view of a transportation state of the handrail pieces of the variable-speed passenger conveyer according to the present invention.
- Fig. 19 is a schematic plan view of a guide rail for decreasing the speed of the handrail pieces provided to the aforementioned deceleration zones S3 and S7 according to the present invention.
- Fig. 20 is an explanatory diagram of a side guide form function relating to the present invention.
- Fig. 21 is a graph of the acceleration of the handrail piece relating to the present invention (R10000).
- Fig. 22 is a graph of the acceleration of the handrail piece relating to the present invention (R20000).
- Fig. 23is a graph of the acceleration of the handrail piece relating to the present invention (R30000).
- Fig. 24 is a graph representing the acceleration of the handrail piece relating to the present invention (third power spline function).
- Fig. 25 is a plan view of another embodiment of the link according to the present invention.
- Fig. 26 is a plan view of another embodiment of the link according to the present invention.
- Fig. 27 is a side view illustrating the engagement relation between the driving chain for high-speed driving in the high-speed zone S2 and the handrail piece according to the present invention.
- Fig. 28 is a cross-section diagram along A-A in Fig. 10.
- Fig. 29 is a single view drawing illustrating the movement of the guide roller according to the present invention.
- Fig. 30 is a single view drawing illustrating the movement of the guide roller according to the present invention.
- Fig. 31 is a flat cross-section view of the variable-speed passenger conveyer handrail device according to the present invention.
- Fig. 32 is a side view of the variable-speed passenger conveyer handrail device according to the present invention as viewed from the railing side.
-
- Fig. 1 is a schematic side view of a transportation state of the variable-speed passenger conveyer according to the present invention.
- In Fig. 1, S1 is an acceleration zone from the boarding end to the high-speed zone, S2 is a high-speed zone, S3 is a deceleration zone from the high-speed zone to the disembarking end, and further, in the return line, S4 is an inversion portion, S5 is an acceleration zone, S6 is a high-speed line the same as the above, S7 is a deceleration zone, and S8 is an inversion portion.
- A pair of later-described guide rails of which the width spacing changes is provided to the aforementioned acceleration zones S1 and S5 and the deceleration zones S3 and S7. Incidentally, the width spacing in the inversion portions S4 and S8 is constant.
- Also, the guide rails are not provided to the high-speed zones S2 and S6, but a chain 1 is provided for obtaining driving force. The driving mechanism of the pallets is comprised of the aforementioned chain 1 and a plurality of chain sprockets 2 for driving the chain 1, and force is transmitted to one of the chain sprockets 2 from a motor (not shown).
- Fig. 2 is a schematic plan view illustrating a deceleration state of the variable-speed passenger conveyer according to the present invention.
- In Fig. 2, 3 is a palette, and the palette is linked in a rhombic form with the adjacent palette by four links 4 mutually joined. 5 is an intermediate joint joining the links 4 from the preceding and trailing pallets 3 and 3, and the joints 6 and 6 to the side are structured to follow the change in width of the guide rails 7 and 7.
- Accordingly, the width of the guide rail 7 and 7 is formed so as to be gradually wider in the deceleration zone S3 from the high-speed zone S2 to the disembarking end or the deceleration zone S7 in the return line from the high-speed zone S6 to the inversion portion S4, so that the links 4 are moved in the direction of the joints 6 and 6 to either side such that the links 4 take on a closed rhombic form, and the spacing of the pallets 3 and 3 narrows as shown in the Figure, thus creating a state of deceleration.
- Also, a pair of guide rails 7 and 7 are provided to the acceleration zone S1 from the boarding end to the high-speed zone or the acceleration zone S5 in the return line, and the guide rails 7 and 7 in the acceleration zones S1 and S5 are formed to narrow, opposite to the above description, so that the links 4 are moved in the inner direction of the joints 6 and 6 to either side such that the links 4 take on an open rhombic form, and the spacing of the pallets 3 and 3 spreads, thus creating a state of acceleration.
- Variable-speed passenger conveyers are different from conventional passenger conveyers in that the speed at the boarding and disembarking ends is low, and the speed at the intermediate portion is high. Accordingly, acceleration occurs as a matter of course at the acceleration/deceleration zones at which the speed changes from low speed to high speed, or from high speed to low speed. This acceleration affects the ease of ride of the passengers on the conveyer, and the greater the acceleration is, the greater the discomfort in ride of the passengers is. It is desirable that the acceleration generated at the acceleration/deceleration zones be as small as possible, i.e., that the acceleration in the acceleration/deceleration zones be a constant acceleration.
- According to the variable-speed passenger conveyer according to the present invention, the factor controlling the acceleration is the form of the guide rail 7. Accordingly, analyzing the change in acceleration of the pallets upon change of the form of the guide rail 7 is extremely important in optimal design of the acceleration of the pallets.
- Let us now consider the speed and acceleration of the pallets 3 as to the guide rail 7.
- In Fig. 2 which illustrates the state of deceleration of the pallets 3 in the deceleration zone S3 of the variable-speed passenger conveyer according to the present invention, 3 is a palette, 4 is a link 5 is an intermediate joint, 6 is a joint to the guide rail 7, and 7 and 7 are guide rails.
- As shown in Fig. 2, a coordinates system (X, Y) is placed on the plane formed of the guide rail 7, 7 with X as the transportation direction of the conveyer and Y as the width direction of the conveyer.
- With the center line of the guide rails 7 and 7 as zero, the function of a value obtained by subtracting half of the width of the intermediate joint 5 of the guide rail 7 from the value of the width orthogonal with the joint 6 from the center line in the Y direction (i.e., guide form function) is set as G (X).
- Considering the link guide rail system shown in Fig. 2 to be a fluid system, the following relational expression (Mathematical Expression 1) holds:
- VL, VH: speed of palette 3 in low speed and high speed zones
- GL, GH: value of guide shape function G (X) in low speed and high speed zones
- L: length of the link 4
- K; width of the joint 6
-
- The driving system for the pallets shown in Fig. 1 pulls the pallets by means of a chain in the high-speed zones S2 and S6, so the speed VH of the pallets in the high-speed zone is constant. Using the pallet speed VH as a standard, generalizing the Mathematical Expression 1 for application to all zones yields the following Mathematical Expression 2 which is an approximate expression for the speed V(x) of the pallets 3.
- Also, an approximate expression for the acceleration a(x) can be obtained by time-differentiation of Mathematical Expression 2, yielding the following Mathematical Expression 3.
- In the event that the certain speed change ratio (= speed of high-speed zone / speed of low-speed zone) has been obtained using Mathematical Expression 1, a relational expression can be obtained for the form design variables L, K, GL, and GH of the link guide system of the pallets, and an approximate value for the speed and acceleration of the pallets 3 can be obtained using Mathematical Expression 2 and Mathematical Expression 3.
- The speed and acceleration of the palette obtained using Mathematical Expression 2 and Mathematical Expression 3 are only approximate values, and it is necessary to obtain the speed and acceleration of the pallets using a model which is closer to the actual link guide system of the pallets.
- With the X coordinate (palette position) of the center of the palette 3 as Xi, the following Mathematical Expression 4 holds between the i+1-th palette position Xi-1 and the i-th palette position Xi:
- In Mathematical Expression 4, Gij+1 represents
- In Mathematical Expression 5, Vi represents the i-th pallet speed. Time-differentiation of Mathematical Expression 5 yields the following Mathematical Expression 6:
- In Mathematical Expression 6, ai represents the i-th roller speed. Mathematical Expression 4 is used to asymptotically obtain the palette position Xi. Mathematical Expression 5 and the palette position Xi is used to asymptotically obtain the pallet speed Vi.
- Mathematical Expression 6, palette position Xi, and pallet speed Vi are used to asymptotically obtain the palette acceleration ai.
- Since there is the component
- Fig. 3 is an explanatory diagram of the guide form function relating to the present invention, and shows a C1 class continuous guide form function. The broken line is the basic design line of the guide comprised of line segments, and the solid line is the guide form function G(X). The GH area is the high-speed zone of the design line, the GC area is the acceleration/deceleration zone of the design line, and the GL area is the low-speed zone of the design line.
- Inserting arcs with a certain curvature radius to area boundary points GP1 and GP2 in the basic design line of the guide forms the guide form function G(X). In the areas GL1, GL2, and GL3, the guide form function G(X) is a straight line, and in the areas GC1 and GC2 the guide form function G(X) is an arc with a radius R.
- Fig. 4, Fig. 5, and Fig. 6 are graphs of the acceleration of the pallets. The speed VH of the palette in the high-speed zone is 1200 mm/s.
- The solid line represents the acceleration (numerical value solution) of the palette obtained using Mathematical Expression 6, and the broken line represents the acceleration (approximate solution) of the palette obtained using Mathematical Expression 3.
- The dimensions of the guide link system are as follows: length GC of the acceleration/deceleration zone = 3400 mm; guide form function value GH at the high-speed zone = 54.3 mm; guide form function value GL at the low-speed zone = 275.5 mm; and link length L = 312.5 mm.
- In Fig. 4, Fig. 5, and Fig. 6, R represents the acceleration of the palette at 10000 mm, 20000 mm, and 30000 mm. The numerical value solution vibrates (oscillates) with the approximate solution as the offset thereof. The smaller R is, the greater the oscillation of the numerical value solution is. The greater R is, the smaller the maximum acceleration of the palette is, but the greater R is the greater the manufacturing cost is, so it is appropriate to set R = 20000 mm from both perspectives of the maximum acceleration of the pallets and the manufacturing cost thereof.
- Taking into consideration the guide optimal form function G*(X) at which the greatest acceleration of the palette is minimal, the guide optimal form function G*(X) is defined as being a guide form function wherein the acceleration of the palette is constant in the acceleration/deceleration zones. This is represented in the differentiation equation of the following Mathematical Expression 7, boundary conditions.
- G*(X) which is obtained from the Mathematical Expression 7 and Mathematical Expression 8 is connected by C° class continuation at boundary points GP1a and GP2a with low-speed zone guide and high-speed zone guide, but is not connected by C1 class continuation. This G*(X) cannot solve the numerical value solution of the acceleration of the palette in Mathematical Expression 6.
- Also, the offset component of the acceleration of the palette is of a matter reduced, but the oscillating component becomes very great, and consequently, the minimum value of the maximum acceleration of the palette becomes extremely great.
- Accordingly, using a weak format differentiation equation expression instead of a strong format differentiation equation expression such as Mathematical Expression 7 and Mathematical Expression 8 for representing the guide optimal form function G*(X) yields the pan-function minimisation problem of the following Mathematical Expression 9, boundary conditions.
- Substituting Mathematical Expression 3 into a(x) in Mathematical Expression 9 yields the following Mathematical Expression 11:
- Mathematical Expression 11 is a definitive expression the same as a third order spline function, and thus Mathematical Expression 12 holds, and G*(X) can be obtained:
- In Mathematical Expression 12, the right side of the first expression represents a third order spline function, x(i) represents the X coordinate of the control point of the guide optimal form function, and N represents the number of control points. Since the number of expression for boundary conditions in Mathematical Expression 10 is four, four control points N is sufficient, but in order to further minimize the maximum acceleration of the palette the number of control points N will be increased to six, and the conditions of the following Mathematical Expression 13 added to obtain a third order spline function.
- Also, the values of the control points are as shown in the following Mathematical Expression 14:
- Fig. 7 is a graph representing the acceleration of the pallets. The speed VH of the pallets in the high-speed zone is 1200 mm/s.
- In Fig. 7, the solid line represents the acceleration (numerical value solution) of the pallets obtained using Mathematical Expression 6, and the broken line represents the acceleration (approximate solution) of the pallets obtained using Mathematical Expression 3.
- The dimensions of the guide link system are as follows: GPIa=-500; GP1=0, GPIb=500, GP2b=2900; GP2=3400;GP2a=3900; guide form function value GH at the high-speed zone = 54.3 mm; guide form function value GL at the low-speed zone = 275.5 mm; and link length L = 312.75 mm.
- The approximate solution is constant in the intermediate range of the acceleration/deceleration zones. The numerical value solution vibrates (oscillates) with the approximate solution as the offset thereof.
- Based on the dimensions of the guide form, the one that corresponds with the acceleration graph of the palette in Fig. 7 is the acceleration graph of the palette in Fig. 5 (R 20000), and comparing Fig. 7 and Fig. 5, it can be understood that the acceleration of the palette in Fig. 7 is smaller.
- Fig. 8 is a partial enlarged side view illustrating the details of the driving mechanism of the pallets 3 in the high-speed zone S2 of the present invention. Only one palette 3 is shown, and the return line high-speed zone S6 is inverted vertically.
- In Fig. 8, the metal pieces 1a of the chain 1 sequentially engage the recessed portion 3b provided to the end of the engaging metal pieces of the pallets 3 from the bottom, thereby driving the pallets 3 in the transporting direction. Accordingly, the guide rails 7 and 7 are not present in the high-speed zones S2 and S6, the spacing in the transporting direction of the pallets 3 (transporting speed) is determined by the spacing of the metal pieces 1a of the chain, and the driving force of the entire palette 3 is provided at this position.
- Incidentally, 3c is comb teeth joined to the end portion of the palette 3, forming a bridging standing surface when the spacing of the pallets 3 is open.
- Fig. 9 is an arrow diagram of A in Fig. 8, the palette 3 being comprised of a standing surface 3d and frame 3e, with running rollers 30 being provided to both ends of the frame 3e.
- Also, running rails 8a which are formed in a loop over the entire area of the transporting line and the return line are attached to the conveyer frame 8, so that the running rollers roll over the running rails 8a and support the weight of the passengers and so forth.
- A spline shaft 31 is attached to the rear of the palette 3 in the width direction orthogonal to the transporting direction, slide blocks 4a and 4a comprised of ball bearings and the like for joining the link 4 to the spline shaft 31 are provided, these sliding over the spline shaft 31, and forming the opening angle of the links 4.
- Provided below the slide blocks 4a and 4a are guide rollers 4b and 4b which fit the guide rails 7 and 7, but these do not function at high speed.
- Also, the chain sprocket 2 is attached to the shaft 20, and the shaft 20 is supported by the bearings 8b and 8b of the conveyer frame.
- Also, 21 is a force transmitting sprocket for transmitting force from a motor (not shown), 22 is a force transmitting sprocket for transmitting force to a variable-speed handrail (not shown) within the railing 23, and the bottom side of Fig. 9 indicates the return side of the palette 3.
- Fig. 10 is a bottom view of the attachment structure of the palette 3 and link 4 of the present invention as viewed from the rear side of the palette 4.
- In Fig. 10, 3 is pallets and 30 is 30 is running rollers. The right half is the state wherein the guide roller 4b slides along the spline shaft 31 due to restriction by the guide rail 7 and is moved toward the outside, making the opening angle of the links 4 to be acute, and bringing the pallets 4 into close proximity in the acceleration zones S1 and S5 and the deceleration zones S3 and S7 shown in Fig. 1.
- Also, the left half is the state wherein the guide roller 4b slides along the spline shaft 31 and is moved toward the inside, by means of the pallets being separated by the chain 1 and metal pieces 1a shown in Fig. 8 engaging the recessed portion 3b of the engaging metal piece 3a, making the opening angle of the links 4 to be obtuse, in the high-speed zones S2 and S6.
- 32 is a bearing for the spline shaft 31, and 3c is comb teeth forming the standing surface between the pallets 3 and 3.
- Also, in the high-speed zones S2 and S6, width determining material (not shown) may be provided separately, in order to prevent margin of error of movement of the guide rollers 4b outwards.
- Fig. 11 is a partial cross-view diagram illustrating one side of the passenger conveyer in the acceleration zones S1 and S5 and the deceleration zones S3 and S7 in Fig. 1 of the present invention, wherein running rollers 30 provided to the side of the palette 3 comprised of the standing surface 3d and frame 3e are structure to roll over running rails 8a formed on the conveyer frame 8, with guide rails 7 provided to the conveyer frame, and guide rollers 4b fit into the guide rails 7, so that the guide rollers 4b are integral with the slide blocks 4a sliding over the spline shaft 31 provided in the width direction of the palette 3.
- Incidentally, 32 is a bearing for the spline shaft 31, and is fixed to the frame 3e to the rear of the palette 3. 4 is a link axially borne by a vertical shaft 4c.
- Fig. 12 is a cross-sectional diagram along B-B in Fig. 11, wherein the links 4 and 4 are supported by the joint 6 so as to be horizontally rotatably supported to the side to the slide blocks 4a, and the other end of the link 4 is axially supported by the link 4 extending from the neighboring palette 3 and the intermediate joint 5.
- Incidentally, guide rollers 4b are axially supported at the bottom of the slide blocks 4a.
- Fig. 13 is a cross-sectional diagram along C-C in Fig. 12, showing the structure wherein slide blocks 4a are fit to the spline shafts 31 provided in the width direction of the palette 3, and ball bearings 4d are provided to the slide blocks 4a, so that smooth movement can be carried out to the spline shaft 31.
- Fig. 14 is a partial side view of the palette according to the present invention.
- In Fig. 14, 3c is comb teeth, 3d is a standing surface, with running roller 30 and 30 being provided to both sides and the front and rear of the bottom of the bottom, these running rollers rolling on the running rails 8a. Further, a roller 34 is provided to the upper rear portion of the palette 3 so that the comb teeth of the rear adjacent pallet smoothly engages the fixed comb teeth of the standing surface 3d and the load of the comb teeth 3c is supported at the transporting line.
- Also, guide arms 35 are provided integrally to both sides of the comb teeth 3c with a certain angle , so as to rotate with the shaft 36 as a central shaft, and further, rollers 37 are provided to the tips of the guide arms 35.
- The guide arms 35 and rollers 37 are for preventing jutting of the comb teeth 3c upon inversion of the palette 3.
- Fig. 15 is a side view illustrating the operation state when the palette 3 according to the present invention is inverted.
- In Fig. 15, in the event that the palette 3 has moved in the direction shown by the arrow, the comb teeth 3c attempt to fly outwards as the lower palette 3 heads upwards, but a guard rail 9 is provided, so the roller 37 at the tip of the guide arm 35 comes into contact and is restricted, so that the comb teeth 3c do not fly outwards more than a certain amount.
- Fig. 16 is a side view showing the operation state of another embodiment of means for preventing comb teeth 3c according to the present invention from flying outwards, in which a stopper 38 is provided to the real side of each palette 3, so that the roller 37 at the tip of the guide arm 35 formed integrally with the comb teeth 3c comes into contact and is restricted, thus preventing the comb teeth 3c from flying outwards.
- Incidentally, the means for preventing the comb teeth 3c from flying outwards according to the embodiments as shown in Fig. 15 and Fig. 16 are not restricted to variable-speed passenger conveyers, but can also be applied to conventional-type passenger conveyers wherein the conveyer moves from the boarding end to the disembarking end at a constant speed, and also, the driving means is not restricted to the embodiment.
- Fig. 17 shows an embodiment of the link adjusting mechanism according to the present embodiment, and is a bottom view from the rear of the palette 3.
- The link adjusting mechanism is provided to S5 (acceleration zone) or S7 (deceleration zone) in Fig. 1, with the Figure showing adjusting means of the link 4 system in S5 (acceleration zone).
- i.e., "play" is provided in the width direction of the guide roller 4b by means of changing the spacing that the guide roller 4b moves within the guide rails 7 and 7 from L1 to L2. Accordingly, the passage path of the guide roller 4b within the guide rail 7 changes, i.e., the spacing of the pallets controlled by the width direction of the guide rollers 4b changes, and consequently the link length of the link 4 system is adjusted. Employing such means facilitates ease of adjusting the engaging timing with the palette 3 in S6 (high-speed zone) as to the pulsating to the link length of the link 4 system in the section from disengaging the chain in S2 (high-speed zone) and reengaging the chain in S6 (high-speed zone), and also, the link length of the link system during operation is automatically adjusted, so that transporting is performed smoothly.
- Also, in the assembly of the variable-speed conveyer according to the present invention, it is possible to absorb the margin of error between the link length of a link system designed based on an ideal guide rail position and a link length determined by the position of the guide rail actually installed when assembling.
- As shown in Fig. 17, the channel width of the guide rails 7 forms a "play section" which expands from L1 to L2 in the deceleration zone S5 which extends from the high speed zone S6 to the low-speed zone S4, and the returns to L1.
- The length of the section of play Sa is calculated by the full circumference margin of error ΔL12345678 of the palette 3 in each of the zones S1, S2, S3, S4, S5, S6, S7, and S8 (converted as the full-circumference margin of error in the high-speed zone) being obtained by calculating the amount of wobble of the guide roller 4b and width L1 of the guide rails 7 and obtain the length of the section of play Sa from this amount of wobble using Mathematical Expression 4.
- A certain length of section of play Sa is decided upon beforehand, and the leeway of adjustment ΔLa of the palette 3 generated in each of the play zones S5 and S7 (converted as the leeway of adjustment in the high-speed zone) is obtained by calculating the amount of wobble of the guide roller and width L2 of the guide rails 7 and obtain from this amount of wobble using Mathematical Expression 4.
- The leeway of adjustment ΔLa of the palette 3 is obtained while changing the length of the section of play Sa. The full circumference margin of error ΔL12345678 of the palette 3 is multiplied by a safety ratio S to yield the full circumference margin of error ΔL of the palette 3. If the length of the section of play Sa is such that the following Mathematical Expression 15 holds, this means that there is sufficient leeway in the play section.
- The present invention is as described above, and has the following advantages:
- (1) The structure is simple, and the amount of extraction of the comb teeth to the floor can be reduced at the time of inversion of the pallets, meaning that the space occupied by the under-floor structure can be reduced, and also, the margin of error of the floor surface and the pallet surface can be set low, and facility costs are low.
- (2) The construction is of rhombic form rigid links, so the pallet spacing can be set with good precision even in the event that the degree or direction of load changes, and the comfort of ride is not deteriorated.
- (3) The guide rail is a smooth curve, meaning that the acceleration of the palette can be reduced to a low level, and the passengers on the pallets are not subjected to discomfort at the time of acceleration.
- (4) Means for adjusting the link length are provided, so initial adjustment of the link system is easy, and even in the event that the link length stretches or shrinks during operation, adjustment is automatically made within the section, so stable operation can be conducted, and special maintenance work is not necessary.
-
- Fig. 18 is a schematic enlarged side view of the railing portion to which are provided the handrail pieces of the variable-speed passenger conveyer according to the present invention, wherein the transporting line A is comprised of an acceleration zone S1 in which the handrail piece is gradually accelerated from the boarding end, a high-speed zone S2, and a deceleration zone S3 in which the handrail piece is gradually decelerated toward the disembarking end.
- The return line B is comprised of an inversion portion S4 at which the handrail is inverted, an acceleration zone S5, a high-speed zone S6, a deceleration zone S7 in which the handrail piece is gradually decelerated, and an inversion portion S8 heading toward the boarding end.
- A driving chain 101 is provided to the high-speed zone S2, and the handrail piece is driven at high speed by sprockets 102. One of the sprockets 102 has the same motor as an unshown sprocket of the lower pallet transporting line, and is driven synchronously with the high speed of the pallets.
- Fig. 19 is a schematic plan view of a guide rail for decreasing the speed of the handrail pieces provided to the deceleration zones S3 and S7 according to the present invention.
- In Fig. 19, 103 is a handrail piece, and 104 is a running rail for guiding the handrail piece, with the running rail 104 being provided in loop fashion over the entire area of the transporting line A in Fig. 18 and the return line B thereof.
- 105 is a standard guide rail also provided to the running rail 104, with the standard guide rail 105 also being provided in loop fashion over the entire area of the transporting line A and the return line B as with the running rail 104.
- 106 is a side guide rail, the spacing thereof with the standard guide rail changing in the acceleration/deceleration zones S1, S3, S5, and S7, and this spacing being the same at the inversion portions S4 and S8. Incidentally, there are no side guide rails 106 provided to the high-speed zones S2 and S6.
- 107 is a link, and these links are formed in V-shaped arrangements between the standard guide rail 105 and the side guide rail 106 in a continuous manner over the entire range of the transporting line and the return line in a loop.
- Provided to the link 107 to the side toward the standard guide rail 105 is a standard guide roller 108 engaged with the handrail piece 103, and provided to the side toward the side guide rail 106 is a side guide roller 109, with each being guided by the standard guide rail 105 and the side guide rail 106.
- Incidentally, it is advantageous to also provide a link 107' and a standard guide roller 108' between the handrail pieces 103 and 103 to form a continuous link system, since the spacing between the standard guide rail 105 and side guide rail 106 can be formed narrow, thereby enabling design with the width of the handrail portion being narrow.
- As shown in the Figure, in the deceleration zones S3 and S7, the side guide rail 106 is provided so that the spacing with the standard guide rail 105 gradually increases toward the transporting direction (arrow). Accordingly, the angle formed alternately by the links 107 becomes an acute angle as the spacing between the standard guide rail 105 and the side guide rail 106 increases, the spacing between the handrail pieces 103 and 103 becomes closer, and thus a low-speed state can be created.
- Also, in the acceleration zones S1 and S5, the spacing between the side guide rail 106 and the standard guide rail 105 gradually narrows toward the transporting direction, conversely, and the angle formed alternately by the links 107 with the handrail pieces being moved in that state becomes an obtuse angle, the spacing between the handrail pieces 103 and 103 increases, and thus a high-speed state can be created.
- Variable-speed passenger conveyers are different from conventional passenger conveyers in that the speed at the boarding and disembarking ends is low, and the speed at the intermediate portion is high. Accordingly, acceleration occurs as a matter of course at the acceleration/deceleration zones at which the speed changes from low speed to high speed, or from high speed to low speed. This acceleration affects the ease of ride of the passengers on the conveyer, and the greater the acceleration is, the greater the discomfort in ride of the passengers is. It is desirable that the acceleration generated at the acceleration/deceleration zones be as small as possible, i.e., that the acceleration in the acceleration/deceleration zones be a constant acceleration. Also, it is desirable that the position relation of the conveyer portion and the handrail portion match, meaning that the handrail portion must have the same acceleration as the conveyer portion.
- According to the handrail portion of the variable-speed passenger conveyer according to the present invention, the factor controlling the acceleration is the form of the side guide rail.
- Accordingly, analyzing the change in acceleration of the handrail piece upon change of the form of the side guide rail is extremely important in optimal design of the acceleration of the handrail piece.
- Let us now consider the speed and acceleration of the handrail piece 103 as to the side guide rail 106.
- As shown in Fig. 19, a coordinate system (X, Y) is placed on a plane formed of the standard guide rail 105 and side guide rail 106, with the width factor of the side guide rail 106 as viewed from the standard guide rail 105 (i.e., side guide form function) as G (X).
- Considering the link guide system to be a fluid system, the following relational expression Mathematical Expression 16 holds:
- VL, VH: speed of handrail piece 103 in low speed and high speed zones
- GL, GH: value of side guide shape function G (X) in low speed and high speed zones
- L: length of link
-
- The driving system for the railing shown in Fig. 18 pulls the handrail pieces by means of a chain in the high-speed zones S2 and S6, so the speed VH of the handrail piece in the high-speed zone is constant. Using the handrail piece speed VH as a standard, generalizing the Mathematical Expression 16 for application to all zones yields the following Mathematical Expression 17 which is an approximate expression for the speed V(x) of the handrail piece 103.
- Also, an approximate expression for the acceleration a(x) can be obtained by time-differentiation of Mathematical Expression 17, yielding the following Mathematical Expression 18.
- In the event that the certain speed change ratio (speed of high-speed zone / speed of low-speed zone) has been obtained using Mathematical Expression 16, a relational expression can be obtained for the form design variables L, GL, and GH of the link guide system of the handrail, and an approximate value for the speed and acceleration of the handrail piece can be obtained using Mathematical Expression 17 and Mathematical Expression 18.
- The speed and acceleration of the handrail piece obtained using Mathematical Expression 17 and Mathematical Expression 18 are only approximate values, and it is necessary to obtain the speed and acceleration of the handrail piece using a model which is closer to the actual link guide system of the handrail.
- With the X coordinate (roller position) of the standard guide rollers 108 and 108' as Xi, the following Mathematical Expression 19 holds between the i+1-th roller position Xi+1 and the i-th roller position Xi:
- In Mathematical Expression 19, Gi,i+1 represents
- In Mathematical Expression 20, Vi represents the i-th roller speed. Time-differentiation of Mathematical Expression 20 yields the following Mathematical Expression 21:
- In Mathematical Expression 21, ai represents the i-th roller speed. Mathematical Expression 19 is used to asymptotically obtain the roller position Xi. Mathematical Expression 20 and the roller position Xi is used to asymptotically obtain the roller speed Vi.
- Mathematical Expression 21, roller position Xi, and roller speed Vi are used to asymptotically obtain the roller acceleration ai.
- Since there is the component
- The GH area is the high-speed zone of the design line, the GC area is the acceleration/deceleration zone of the design line, and the GL area is the low-speed zone of the design line. Inserting arcs with a certain curvature radius to area boundary points GP1 and GP2 in the basic design line of the guide forms the side guide form function G(X). In the areas GL1, GL2, and GL3, the side guide form function G(X) is a straight line, and in the areas GC1 and GC2 the side guide form function G(X) is an arc with a radius R.
- Fig. 21, Fig. 22, and Fig. 23 represent graphs of the acceleration of the handrail pieces. The speed VH of the handrail piece in the high-speed zone is 1200 mm/s. The solid line represents the acceleration (numerical value solution) of the handrail piece obtained using Mathematical Expression 21, and the broken line represents the acceleration (approximate solution) of the handrail piece obtained using Mathematical Expression 18.
- The dimensions of the guide link system are as follows: length GC of the acceleration/deceleration zone = 3400 mm; side guide form function value GH at the high-speed zone = 80 mm; side guide form function value GL at the low-speed zone = 135.1 mm; and link length = 153.5 mm. R represents the acceleration of the handrail piece at 10000 mm, 20000 mm, and 30000 mm. The numerical value solution vibrates (oscillates) with the approximate solution as the offset thereof. The smaller R is, the greater the oscillation of the numerical value solution is. However, the greater R is, the smaller the maximum acceleration of the handrail piece is, but the greater R is the greater the manufacturing cost is, so it is appropriate to set R = 20000 mm from both perspectives of the maximum acceleration of the handrail pieces and the manufacturing cost thereof.
- Taking into consideration the side guide optimal form function G*(X) at which the greatest acceleration of the handrail piece is minimal, the side guide optimal form function G*(X) is defined as being a side guide form function wherein the acceleration of the handrail piece is constant in the acceleration/deceleration zones. This is represented in the differentiation equation of the following Mathematical Expression 22, boundary conditions.
- G*(X) which is obtained from the Mathematical Expression 22 and Mathematical Expression 23 is connected by C0 class continuation at boundary points GP1a and GP2a with low-speed zone guide and high-speed zone guide, but is not connected by C1 class continuation. This G*(X) cannot solve the numerical value solution of the acceleration of the handrail piece in Mathematical Expression 21. Also, the offset component of the acceleration of the handrail piece is of a matter reduced, but the oscillating component becomes very great, and consequently, the minimum value of the maximum acceleration of the handrail piece becomes extremely great.
- Using a weak format differentiation equation expression instead of a strong format differentiation equation expression such as Mathematical Expression 22 and Mathematical Expression 23 for representing the side guide optimal form function G*(X) yields the pan-function minimization problem of the following Mathematical Expression 24, boundary conditions.
- Substituting Mathematical Expression 18 into a(x) in Mathematical Expression 24 yields the following Mathematical Expression 26:
- Mathematical Expression 26 is a definitive expression the same as a third order spline function, and thus Mathematical Expression 27 holds, and G*(X) can be obtained:
- In Mathematical Expression 27, the right side of the first expression represents a third order spline function, x(i) represents the X coordinate of the control point of the side guide optimal form function, and N represents the number of control points. Since the number of expression for boundary conditions in Mathematical Expression 25 is four, four control points is sufficient, but in order to further minimize the maximum acceleration of the handrail the number of control points N will be increased to six, and the conditions of the following Mathematical Expression 28 added to obtain a third order spline function.
- Also, the values of the control points are as shown in the following Mathematical Expression 29:
- Fig. 24 is a graph representing the acceleration of the handrail pieces. The speed VH of the handrail piece in the high-speed zone is 1200 mm/s.
- The solid line represents the acceleration (numerical value solution) of the handrail piece obtained using Mathematical Expression 21, and the broken line represents the acceleration (approximate solution) of the handrail piece obtained using Mathematical Expression 18.
- The dimensions of the guide link system are as follows: GPIa=-200, GPI=0, GPIb=200, GP2b=3200, GP2=3400, GP2a=3600, side guide form function value GL at the low-speed zone = 135.1 mm; and link length L = 153.5 mm.
- The approximate solution is constant in the intermediate range of the acceleration/deceleration zones. The numerical value solution vibrates (oscillates) with the approximate solution as the offset thereof. Based on the dimensions of the guide form, the one that corresponds with the acceleration graph of the handrail piece in Fig. 24 is the acceleration graph of the handrail piece in Fig. 22 (R=20000), and comparing Fig. 24 and Fig. 22, it can be understood that the acceleration of the handrail piece in Fig. 24 is smaller.
- Fig. 25 is a schematic plan view of another embodiment of the aforementioned link 107 according to the present invention.
- The link 107 is linked from the standard guide rail 5 (the side toward the handrail piece 103) to the side guide rail 106 and standard guide rail 105 in a V-shape. In this embodiment as will, the width of the handrail is increased somewhat, but acceleration/deceleration of the handrail pieces 103 can be performed. Also, the speed of the hand rail piece 103, approximate solution of acceleration, numerical value solution, and the side guide rail design method, described in the embodiment shown in Fig. 19, can be used.
- Fig. 26 is a schematic plan view of another embodiment of the link 107 according to the present invention.
- This is link guide system wherein link members 108a, link members 108a', or link members 109a are inserted between the links 107 of the embodiment shown in Fig. 19. This construction enables the link guide system to be further flattened.
- With the present embodiment, the speed of the hand rail piece 103, approximate solution of acceleration, numerical value solution, and the side guide rail design method, described in the embodiment shown in Fig. 19, are somewhat different.
- Considering the link guide system shown in Fig. 26 to be a fluid system, the following relational expression (Mathematical Expression 30) holds:
- In Mathematical Expression 30, K represents the average length of link members 108a, 108a', and 109a.
- The following Mathematical Expression 31 is an approximate expression for the speed V(x) of the handrail piece 103.
- An approximate expression for the acceleration a(x) is represented by the following Mathematical Expression 32.
- With the X coordinate (link member position) of the link members 108a and 108a' as Xi, the following Mathematical Expression 33 holds between the i+1-th link member position Xi+1 and the i-th link member position Xi:
- Time-differentiation of Mathematical Expression 33 yields the following Mathematical Expression 34:
- Time-differentiation of Mathematical Expression 34 yields the following Mathematical Expression 35:
- Mathematical Expression 33 is used to asymptotically obtain the link member position Xi. Mathematical Expression 34 is used to asymptotically obtain the link member position Vi. Mathematical Expression 35, link member position Xi, and link member speed Vi are used to asymptotically obtain the link member acceleration ai.
- The design method for the side guide form function G(X) in the acceleration/deceleration zones is the same as the case of the embodiment in Fig. 19.
- With the design method for the side guide optimal form function G*(X), the pan-function minimization problem, boundary conditions, yield the following Mathematical Expression 36:
- Substituting Mathematical Expression 32 into a(x) in Mathematical Expression 36 yields the following Mathematical Expression 38:
- Mathematical Expression 38 is a definitive expression the same as a third order spline function, and thus the following Mathematical Expression 39 holds, and G*(X) can be obtained:
- In Mathematical Expression 39, the right side of the first expression represents a third order spline function, x(i) represents the X coordinate of the control point of the side guide optimal form function, and N represents the number of control points. Since the number of expression for boundary conditions in Mathematical Expression 37 is four, four control points is sufficient, but in order to further minimize the maximum acceleration of the handrail the number of control points N will be increased to six, and the conditions of the following Mathematical Expression 40 added to obtain a third order spline function.
- Also, the values of the control points are as shown in the following Mathematical Expression 41:
- Incidentally, The side guide rail 106 described in Fig. 19, Fig. 25, and Fig. 26 does not need to be provided to the high-speed zones S2 and S6.
- Fig. 27 is a side view illustrating the engagement relation between the driving chain 101 for high-speed driving in the high-speed zone S2 shown in Fig. 18 and the handrail piece 103.
- In Fig. 27, 101 is a driving chain, and 101a is a protrusion provided to the chain 101 at certain intervals. 110 is an engaging metal piece of which the other end engages the handrail piece 103, the recessed portion 110a of the engaging metal piece 110 engaging with a roller 101b of the protrusion 101a of the chain 101, being driven by driving of a sprocket 102.
- The intermediate portion of the engaging metal piece 110 is integrally attached to the link member 108a of the standard guide rollers 108 and 108, and the other end is engaged with a metal piece 103a of the handrail piece 103 by a roller 110b provided thereto.
- 105 is a standard guide rail, for guiding the standard guide rollers 108 and 108. 104 is a running rail for the handrail piece 3, and causes the handrail piece 103 to run by means of running rollers 103b and 103c which are attached to the handrail piece 103. Incidentally, the high-speed zone S6 in Fig. 18 is also of a similar engaging construction.
- Fig. 28 is a cross-section of line A-A in Fig. 27, and is a cross-sectional diagram of the handrail device of the variable-speed passenger conveyer according to the present invention.
- In Fig. 28, 103 is a handrail piece, 103b and 103c are running rollers which are supported by the handrail piece 103 and are provided so as to pinch a running rail 104 from above and below, constructed so as to prevent wobbling of the handrail piece 103.
- First, the handrail piece 103 is provided to the transporting A side toward the passengers, and is situated in an offset manner such that the passengers can easily grasp it.
- 105 is a standard guide rail, and 106 is a side guide rail. Both guide rails 105 and 106 are integrally formed at portions where spacing is narrow, with a rounded protruding portion formed to the side thereof, and both are formed separately at portions where spacing is wide. At the high-speed zones, the driving chain 101 determines the spacing of the handrail pieces 103 and 103 in order to createahigh-speed state. Accordingly, the aforementioned side guide rail 106 does not need to be operated, and only receive the side guide roller 109 only for supporting the link 107, so a certain amount of wobble is preferable.
- 110 is an engaging metal piece, and is engages the handrail piece 103 and is linked with the link member 108a of the standard guide rollers 108 and 108, and further engages the protrusions 101a of the driving chain 101.
- 107 is a link, the standard guide roller 108 having an hourglass-shaped portion corresponding with the rounded form of the protruding portion of the side of the aforementioned standard guide rail 105, and is axially borne by the link 107 by a spherical bearing 107a.
- Also, 105a is a supporting table for the standard guide rail 105, and 105b is a guard member for restricting movement of the side guide roller 109 outwards. The upper and lower flanges 108b and 108c of the standard guide roller 108 roll against the guard member 105b and standard guide rail 105.
- The side guide roller 109 is axially borne by the other end of the link 107 with a spherical bearing 107b, and the hourglass portion of the side guide roller 109 fits the rounded protruding portion of to the side of the side guide rail 106 as described above. Axially supporting the link 107, standard guide roller 108, and side guide roller 109 with a spherical bearing is advantageous in that there is no interference between the link 107 and the standard guide rail 105 and side guide rail 106 at the inverted portions S4 and S8.
- Also, the side guide rail 106 is comprised of a supporting member 106a and guard member 105b, and the inner side of the side guide rail 106 and guard member 105b roll against the upper and lower flanges 109a and 109b of the side guide roller 109.
- The aforementioned supporting member 106a serves as an adjusting member for determining the adjustment leeway of the circumference of the links 107 at the acceleration/deceleration zones S5 and S7 of the return line.
- Generally, in variable-speed passenger conveyers, it is necessary to provide link systems which use links 107 such as described above for changing speed with means for forming adjustment leeway of the circumference of the links 107.
- With the present invention, the sideways width of the supporting member 106a provided to the acceleration zone S5 and deceleration zone S7 of the return line is wide, and the distance between the standard guide rail 105 and side guide rail 106 is narrow, thus provided some "play" so as to form adjustment leeway for the circumferential length of the link 107.
- 111 is a conveyer frame, and the sprocket 102 for driving the driving chain 101 is axially borne by the conveyer frame 111 by a shaft 102'. Incidentally, 112 and 113 are frame covers.
- The drawing in broken lines to the right of Fig. 28 is a supposed drawing illustrating the positional relation of the side roller 109 at the point that the side guide rail 106 is widest, i.e., at the point of deceleration.
- Fig. 29 is a single view drawing illustrating the movement of the side guide roller 109 in the side guide rail 106 and guard member 105b.
- 109d and 109e are profiles of the side guide roller 109. In order to give a certain amount of clearance between the side guide rail 106 and guard member 105b with the upper flange 109b and lower flange 109c of the side guide roller 109, internal force of the link 107 acts upon the spherical bearing 107b, so the side guide roller 109 tilts as shown by the profiles 109d and 109e as to the design standard line of the standard guide roller which is indicated by a single-dot broken line as shown in the Figure. This is also true for the standard guide rail 105.
- Accordingly, the distance between the handrail pieces 103 and 103 undesirably includes a margin of error as to the certain design value. In order to suppress the inclination of the standard guide roller 108 as much as possible, the height of the guide rail and the guide member is made to be at least the height of the guide roller flange portion. Also, the side form of the upper flange 108b and 109b and the lower flange 108c and 109c of the guide rollers 108 and 109 has been made to be a convex curved plane (arc), so as to facilitate ease of rolling upon rolling contact.
- The radius of the arc if the hourglass-shaped portion 190 of the standard guide roller 105 has been made to be greater than the curvature of the protrusion 160 of the guide rail 106, in order to provide clearance.
- The protrusion 160 of the guide rail 106 is set such that the center line of the guide roller 109 becomes the design standard line at the point that the apex of the concave arc of the guide roller and the apex of the convex arc of the guide rail meet, so that the guide roller 109 tilts with the center thereof as the axis.
- The side form of the protrusions of the aforementioned standard guide rail 105 and the side guide rail 106 is by no means limited to a rounded form; rather, this may be a form with straight sides.
- Fig. 30 is a single view drawing illustrating the movement of the side guide roller 109 in the side guide rail 106 and guard member 106b in the section with "play".
- As shown in Fig. 30, the side guide roller 109 tilts greatly in the side guide rail 106 and guard member 106b with the design standard line as the center thereof. This great tilting generates leeway for adjustment of the distance between the handrail pieces 103 and 103. The protrusion 160 of the guide rail is set such that the center line of the guide roller becomes the design standard line at the point that the apex of the concave arc of the hourglass-shaped portion 190 of the guide roller and the apex of the convex arc of the protrusion 160 of the guide rail meet, so that the guide roller tilts with the center thereof as the axis.
- In designing the length of the section of play Sa, the full circumference margin of error ΔL12345678 of the handrail piece 103 in each of the zones S1, S2, S3, S4, S5, S6, S7, and S8 (converted as the full-circumference margin of error in the high-speed zone) is obtained by using mechanism analysis means such as shown in Fig. 29 to calculate the amount of wobble of the guide roller and obtain the full circumference margin of error from this amount of wobble (Mathematical Expression 33). A certain length of section of play Sa is decided upon beforehand, and the leeway of adjustment ΔLa of the handrail piece 103 in each of the play zones S5 and S7 (converted as the leeway of adjustment in the high-speed zone) is obtained by using mechanism analysis means such as shown in Fig. 30 to calculate the amount of wobble of the guide roller and obtain the leeway of adjustment from this amount of wobble (Mathematical Expression 33). The leeway of adjustment ΔLa of the handrail piece 103 is obtained while changing the length of the section of play Sa. The full circumference margin of error ΔL12345678 of the handrail piece 103 is multiplied by a safety ratio S to yield the full circumference margin of error ΔL of the handrail piece 103. If the length of the section of play Sa is such that the following Mathematical Expression 42 holds, this means that there is sufficient leeway in the play section.
- Also, the minimum section of play Sa in which the Mathematical Expression 42 holds is the limit for the length of the section with play.
- Fig. 31 is a partial flat cross-section view of the variable-speed passenger conveyer handrail device according to the present invention.
- In Fig. 31, 103 is a handrail piece, and 114 is a handrail cover provided between the handrail pieces 103 and 103, and is formed of a flexible material such as accordion bellows form, capable of withstanding the separation distance of the handrail pieces 103 and 103.
- The standard guide rollers 108 and 108 at the end of the links 107 are axially supported by the link member 108a and guided by the standard guide rail 105, and the side guide rollers 109 and 109 at the other end of the links 107 are axially supported by the link member 109a and guided by the side guide rail 106. Further, the guide rollers 108' and 108' at the handrail cover 114 portion are linked by a same link member 108a'.
- Also, the standard guide rollers 108 and 108 and the side guide rollers 109 and 109 are provided in units of two set, improving tracing of the standard guide rail 105 and side guide rail 106, and also doing away with derailing.
- Fig. 32 is a side view of the variable-speed passenger conveyer handrail device according to the present invention as viewed from the railing side, with an offset provided between the handrail piece 103 and handrail cover 114, so that the passengers can grasp the handrail piece 103 in a sure manner.
- The present invention is as described above, and has the following advantages:
- (1) The link is formed in a V-shape within a plane, so transmission of force at the inversion portion of the handrail is smooth, and there is no interference between the standard/side guide rollers and the handrail and link.
- (2) The standard/side guide rails are formed as smooth curves, so the acceleration of the handrail pieces is suppressed to a low level, and discomfort when holding the handrail piece can be relieved.
- (3) A high-speed state is created in the high-speed zone only by the opening operation of the claw spacing of the driving chain, so there is no grinding of links and the like and smooth movement speed of the handrail piece can be obtained.
- (4) Adjustment of the circumferential length of the link (length in the direction of transportation) is performed along the return line, so adjustment of the link is easy when installing, and automatic adjustment is performed during operation.
- (5) Supporting structures such as the link linkage portion, guide rollers, and the like are supported by the guide rail by engaging metal pieces from the handrail piece, so the structure is sure.
-
Claims (11)
- A variable-speed passenger conveyer wherein the transporting speed is changeable in the section between the boarding end and disembarking end by changing the spacing of pallets, characterized by comprising:(a) a pair of guide rails provided in loop fashion to the transporting line so that the width spacing is gradually reduced from the boarding end to the beginning of the high-speed zone and gradually increased from the end of the high-speed zone to the disembarking end;(b) a chain which engages the pallets at the high-speed zone and drives the pallets;(c) the pallet having the followings at the bottom portion:a metal piece for connecting the pallet with the chain;a guide roller which is guided by said pair of guide rails; anda spline shaft for sliding said guide roller in a right-angle direction with the transporting direction;(d) link members for linking in a planar rhombic form said guide roller and the guide roller of the palette adjacent to said guide roller via intermediate joints.
- A variable-speed passenger conveyer according to Claim 1, characterized in that a pair of guide rails is provided in loop fashion to the transporting line so that the width spacing is gradually and smoothly reduced from the boarding end to the beginning of the high-speed zone and gradually and smoothly increased from the end of the high-speed zone to the disembarking end.
- A variable-speed passenger conveyer, comprising:(a) a running rail formed in loop fashion over the entire area of the transporting line and return line;(b) a plurality of pallets running in a linked state on the running rail;(c) comb teeth provided to the side portion of each palette for joining with the adjacent palette;(d) guide arm formed integrally with the base of said comb teeth portion at a certain angle, the guide arm having a roller on the tip thereof; and(e) a guide rail for restricting the roller at the tip of said guide arms at the inversion portion of the transporting line.
- A variable-speed passenger conveyer, comprising:(a) a running rail formed in loop fashion over the entire area of the transporting line and return line;(b) a plurality of pallets running in a linked state on the running rail;(c) comb teeth provided to the side portion of each palette for joining with the adjacent palette;(d) guide arm formed integrally with the base of said comb teeth portion at a certain angle, the guide arm having a roller on the tip thereof; and(e) stoppers which is provided to the rear of the adjacent palette and with which said roller is engaged at the inversion portion of the transporting line.
- A variable-speed passenger conveyer according to Claim 1, wherein the width of the walls of the guide rails restricting the right-angle movement of the guide rollers is formed so as to be wider in the acceleration zone wherein transition is made from the low-speed zone to the high-speed zone in the return line and in the deceleration zone wherein transition is made from the high-speed zone to the low-speed zone therein, than the width at other areas.
- A handrail device for a variable-speed passenger conveyer, comprising:(a) a running rail formed in a loop in a passenger transporting line and a return line;(b) a plurality of handrail pieces which move following said running rail;(c) a standard guide rail formed in a loop in the passenger transporting line and the return line;(d) a side guide rail of which the spacing with said standard guide rail changes within a plane and is provided to acceleration/deceleration zones;(e) links provided between said standard guide rail and said side guide rail in continuous V-formations;(f) standard guide rollers linked to the end of said links toward said standard guide rail by said plurality of handrail pieces and engaging pieces;(g) side guide rollers provided toward said side guide rail of said links; and(h) a driving chain having protrusions for engaging said engaging pieces of said handrail pieces so as to drive said handrail pieces, said driving chains being provided to the high-speed zone of said transport line and high-speed zone of said return line.
- A handrail device according to Claim 6, characterized in that the spacing between the standard guide rail and side guide rail is formed to change smoothly at the acceleration/deceleration zones.
- A handrail device according to Claim 6, characterized in that:guide rollers guided by a standard guide rail and a side rail are axially borne two at a time by links;each guide roller is formed of convex flange-shaped portions and a concave hourglass-shaped portion;one inner side wall of said standard guide rail and said side guide rail is provided with a protrusion, said protrusion fitting with the hourglass-shaped portion of said guide roller;the protrusion is formed with a curvature smaller than that of the hourglass-shaped portion of said guide roller, and arranged such that the center line of the guide roller passes through the standard line of the guide rail in the state of the apex of said protrusion and the bottom point of said hourglass-shaped portion of said guide roller meet; anda gap is provided between the flange portions of said guide roller and both inner walls of the guide rail.
- A handrail device according to Claim 6, characterized in that the cross-section form of the side of the hourglass-shaped portion of the guide roller is arc-shaped, and the protrusion of the guide rail is arc-shaped.
- A handrail device according to Claim 6, characterized in that adjustment of the length of the links is performed by providing a gap between the flange portion of said side guide roller and said side guide rail along the return line.
- A handrail device according to Claim 6, characterized in that handrail pieces are provided toward the end side of the links and provided to the passenger transporting side.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP98101154A EP0931753A1 (en) | 1998-01-23 | 1998-01-23 | Variable-speed passenger conveyor and handrail device therefor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP98101154A EP0931753A1 (en) | 1998-01-23 | 1998-01-23 | Variable-speed passenger conveyor and handrail device therefor |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP0931753A1 true EP0931753A1 (en) | 1999-07-28 |
Family
ID=8231301
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP98101154A Withdrawn EP0931753A1 (en) | 1998-01-23 | 1998-01-23 | Variable-speed passenger conveyor and handrail device therefor |
Country Status (1)
| Country | Link |
|---|---|
| EP (1) | EP0931753A1 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2959730A1 (en) * | 2010-05-10 | 2011-11-11 | Coroller Yves Le | Endless band integrated device for transporting e.g. materials, has endless band comprising sections, where one length of each section passing in one zone is greater than another length of each section passing in another zone |
| WO2018185204A1 (en) | 2017-04-07 | 2018-10-11 | Inventio Ag | Handrail for a passenger conveyor |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB492715A (en) * | 1937-03-23 | 1938-09-23 | J & E Hall Ltd | Improvements relating to escalators and like apparatus |
| GB1256364A (en) * | 1967-12-06 | 1971-12-08 | Pirelli | Passenger conveyor |
| GB1286453A (en) * | 1968-08-23 | 1972-08-23 | Robert Filmer Bridgland | Improved conveyor arrangement |
| FR2123111A1 (en) * | 1971-01-07 | 1972-09-08 | Patin Pierre | |
| GB1383785A (en) * | 1972-11-14 | 1974-02-12 | Univ Johns Hopkins | Variable speed sidewalk |
| EP0015581A2 (en) * | 1979-03-12 | 1980-09-17 | Axel De Broqueville | Transportation device comprising a plurality of successive load carrying components |
| EP0074197A2 (en) * | 1981-08-17 | 1983-03-16 | The Boeing Company | Cable drive systems for moving walkways |
| EP0079438A2 (en) * | 1981-11-16 | 1983-05-25 | The Boeing Company | Accelerating and decelerating walkway handrail |
| GB2264686A (en) * | 1992-03-02 | 1993-09-08 | Hitachi Ltd | Variable-speed pallet-type passenger moving walkway |
| EP0646538A2 (en) * | 1993-10-01 | 1995-04-05 | Mitsubishi Jukogyo Kabushiki Kaisha | A speed variable moving sidewalk |
-
1998
- 1998-01-23 EP EP98101154A patent/EP0931753A1/en not_active Withdrawn
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB492715A (en) * | 1937-03-23 | 1938-09-23 | J & E Hall Ltd | Improvements relating to escalators and like apparatus |
| GB1256364A (en) * | 1967-12-06 | 1971-12-08 | Pirelli | Passenger conveyor |
| GB1286453A (en) * | 1968-08-23 | 1972-08-23 | Robert Filmer Bridgland | Improved conveyor arrangement |
| FR2123111A1 (en) * | 1971-01-07 | 1972-09-08 | Patin Pierre | |
| GB1383785A (en) * | 1972-11-14 | 1974-02-12 | Univ Johns Hopkins | Variable speed sidewalk |
| EP0015581A2 (en) * | 1979-03-12 | 1980-09-17 | Axel De Broqueville | Transportation device comprising a plurality of successive load carrying components |
| EP0074197A2 (en) * | 1981-08-17 | 1983-03-16 | The Boeing Company | Cable drive systems for moving walkways |
| EP0079438A2 (en) * | 1981-11-16 | 1983-05-25 | The Boeing Company | Accelerating and decelerating walkway handrail |
| GB2264686A (en) * | 1992-03-02 | 1993-09-08 | Hitachi Ltd | Variable-speed pallet-type passenger moving walkway |
| EP0646538A2 (en) * | 1993-10-01 | 1995-04-05 | Mitsubishi Jukogyo Kabushiki Kaisha | A speed variable moving sidewalk |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2959730A1 (en) * | 2010-05-10 | 2011-11-11 | Coroller Yves Le | Endless band integrated device for transporting e.g. materials, has endless band comprising sections, where one length of each section passing in one zone is greater than another length of each section passing in another zone |
| WO2018185204A1 (en) | 2017-04-07 | 2018-10-11 | Inventio Ag | Handrail for a passenger conveyor |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8083048B2 (en) | Conveyer apparatus | |
| CA1204696A (en) | Curved escalator | |
| EP1479640A1 (en) | Conveyor device | |
| US20030116403A1 (en) | Racetrack style passenger conveyor | |
| EP0390631B1 (en) | Curved escalator with fixed center and constant radius path of travel | |
| EP0390629B1 (en) | Curved escalator with fixed center and constant radius path of travel | |
| EP0390630B1 (en) | Curved escalation with fixed center and constant radius path of travel | |
| EP0390632B1 (en) | Curved escalator with fixed center and constant radius path of travel | |
| US6138816A (en) | Variable-speed passenger conveyer and handrail device thereof | |
| EP0931753A1 (en) | Variable-speed passenger conveyor and handrail device therefor | |
| EP0424209B2 (en) | Escalator with verical planar step risers and constant horizontal velocity | |
| EP1452476B1 (en) | High speed escalator for slope | |
| EP1331194B1 (en) | Escalator with high speed inclined section | |
| KR100527218B1 (en) | Sloped part high-speed escalator | |
| US5020654A (en) | Curved escalator step chain turnaround zone | |
| JPH1081479A (en) | Handrail device of variable speed type passenger conveyor | |
| JPH1087249A (en) | Variable speed type passenger conveyor | |
| GB2230753A (en) | Passenger conveyor apparatus | |
| JPH11286382A (en) | Variable speed type passenger conveyor | |
| JP2003002572A (en) | Sloped part high-speed escalator | |
| EP1468951A1 (en) | Sloped part high-speed escalator | |
| JPH10265159A (en) | Variable speed type passenger conveyor | |
| JPH1059668A (en) | Variable speed type passenger conveyor | |
| JPH11246160A (en) | Handrail device of variable speed type passenger conveyor | |
| JP2001058786A (en) | Conveyor device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 19980123 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): FR GB |
|
| AX | Request for extension of the european patent |
Free format text: AL;LT;LV;MK;RO;SI |
|
| AKX | Designation fees paid |
Free format text: FR GB |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: 8566 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN WITHDRAWN |
|
| 18W | Application withdrawn |
Withdrawal date: 20020618 |