EP0090713A1 - Système de conduite de tir à lunette d'observation asservie par un dispositif de poursuite automatique - Google Patents
Système de conduite de tir à lunette d'observation asservie par un dispositif de poursuite automatique Download PDFInfo
- Publication number
- EP0090713A1 EP0090713A1 EP83400570A EP83400570A EP0090713A1 EP 0090713 A1 EP0090713 A1 EP 0090713A1 EP 83400570 A EP83400570 A EP 83400570A EP 83400570 A EP83400570 A EP 83400570A EP 0090713 A1 EP0090713 A1 EP 0090713A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- telescope
- tracking
- elevation
- orientation
- phase
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000005855 radiation Effects 0.000 claims abstract description 12
- 238000005286 illumination Methods 0.000 claims abstract description 10
- 238000012937 correction Methods 0.000 claims abstract description 8
- 230000003287 optical effect Effects 0.000 claims abstract description 8
- 239000000523 sample Substances 0.000 abstract 3
- 230000000875 corresponding effect Effects 0.000 description 5
- 238000010304 firing Methods 0.000 description 3
- 230000008901 benefit Effects 0.000 description 2
- 239000000725 suspension Substances 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000002596 correlated effect Effects 0.000 description 1
- 238000005314 correlation function Methods 0.000 description 1
- 230000006378 damage Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 238000001454 recorded image Methods 0.000 description 1
- 238000011105 stabilization Methods 0.000 description 1
- 230000008685 targeting Effects 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images

Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F41—WEAPONS
- F41G—WEAPON SIGHTS; AIMING
- F41G3/00—Aiming or laying means
- F41G3/32—Devices for testing or checking
- F41G3/326—Devices for testing or checking for checking the angle between the axis of the gun sighting device and an auxiliary measuring device
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F41—WEAPONS
- F41G—WEAPON SIGHTS; AIMING
- F41G3/00—Aiming or laying means
- F41G3/06—Aiming or laying means with rangefinder
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F41—WEAPONS
- F41G—WEAPON SIGHTS; AIMING
- F41G3/00—Aiming or laying means
- F41G3/14—Indirect aiming means
- F41G3/145—Indirect aiming means using a target illuminator
Definitions
- the present invention relates to a fire control system, and more precisely to an automatic target targeting and tracking system, particularly suitable for use on aircraft (combat helicopter in particular).
- the operator sends to an automatic tracking device, during this search phase or at the end of this phase, an order of forced orientation of the tracking device along the axis of the telescope; then he decides to go into the automatic tracking phase and sends the tracking device an automatic orientation order on a spotted target.
- the tracking device comprises, in order to ensure the execution of this last point, on the one hand an aiming optic providing an image (video for example) of the target, and on the other hand ecartometry circuits operating for example by contrast or by correlation, which locate the displacements of the image of the target in the field of the optical sight and which ensure the adequate orientation of the tracking device to bring back this image of target in the axis of aimed.
- Information on the direction taken by the tracking device is continuously transmitted, with appropriate fire corrections, to a destruction weapon which therefore targets the target as long as it remains centered in the line of sight of the tracking device. pursuit, and the operator can send a firing order at any time.
- the magnifying bezel follows the movements of the tracking device when the latter is performing an automatic tracking phase, so that the operator can use the telescope as a means of visual control of the proper execution of the chase
- the operator For example, if the target is lost by the tracking device (passing behind a curtain of trees, etc.), the operator must be able to regain control immediately or verify that the tracking device catches up with the lost target on its own. (at the exit of the curtain of trees for example).
- the optics of the telescope and the optics of the tracking device must aim at the same point. otherwise the operator must perform an additional phase of checking or resetting the image given by the tracking device before entering the tracking phase.
- This registration makes it possible to effectively overcome parallax errors and errors due to deformations of the structure of the aircraft. It has the advantage of being able to be done by using as a means of laser illumination the laser rangefinder which is often provided in a fire control system (to work out ballistic corrections of shooting according to the distance from the target), provided that this laser rangefinder effectively emits parallel to the axis of the sighting device or even precisely along the axis thereof.
- the fire control system mounted for example on a helicopter, comprises a certain number of elements of which only those which are necessary for the understanding of the invention. For example, we will not describe all the display systems with which the fire control system can be provided to assist the operator or the pilot.
- FIG. 1 there is a magnifying observation telescope 10, adjustable in elevation and in bearing by motors which are preferably torque motors with electromagnetic drive to avoid the presence of gears in the transmission of the movement.
- the bezel 10 can moreover be gyrostabilized, that is to say that orientation control signals are applied to these motors not directly but by means of gyrometers (simple or integrative gyrometers or two-axis gyroscopes with suspension granted) fixed on the telescope, these gyrometers having for axes the axes of rotation in elevation and in bearing.
- gyrometers simple or integrative gyrometers or two-axis gyroscopes with suspension granted
- FIG. 1 To simplify the description of the invention, there has been shown in FIG. 1 only a bearing orientation motor 12 for the telescope; all the description will moreover be made only with reference to the axes of rotation in the deposit, it being understood that two similar independent circuit paths are necessary respectively for the orientation in elevation and the orientation in deposit.
- the axis of rotation in bearing of the telescope 10 is designated by the reference 14.
- the axis of rotation in elevation would be perpendicular to the plane of the figure.
- An amplifier 16 supplies control signals to the motor 12 (directly or via a gyro-stabilization system). We will see below where these signals come from.
- An angular sensor 18 makes it possible to locate the orientation in bearing of the telescope; of course, another sensor is provided for the orientation in elevation.
- an automatic tracking device 20 constitutes another important element of the fire control system. It is also orientable in elevation and in bearing (orientation motor in bearing 22) around an axis of rotation in bearing 24 and it is preferably gyrostabilized, that is to say that it receives control signals from amplifier 26 no directly but via a gyrostabilization system (not shown here) comprising gyrometers or integrating gyrometers or a gyroscope with tuned suspension, the sensitive axes of which are the axis of rotation in bearing 24 and an axis of rotation in elevation perpendicular to the plane of Figure 1.
- the drive motors of the automatic tracking device are preferably electromagnetic drive.
- Angular orientation sensors in bearing (28) and in elevation (not shown) are provided on the tracking device 20 to identify its orientation at any time.
- the tracking device comprises an objective for forming on an image detector 30 the image of a target situated in the field of view of this objective; the optical axis of this objective is called the line of sight of the device 20 and is designated by the reference 32.
- the image detector 30 which can be a vidicon tube supplying a video signal or a matrix of photosensitive detectors, supplies electrical signals representing the image of the field of view (and in particular of the target being tracked) to a deviation circuit 34 and possibly to display screens (television monitor, etc.).
- the deviation circuit 34 which provides tracking, generates elevation and bearing deviation signals representing the difference between the position of the target in the image and a reference position (for example the center of the picture) ; these signals are intended for the amplifier 26 which controls the orientation motors of the aiming device so as to bring the image of the target back to the reference position when it tends to move away from it.
- the deviation circuit can operate by contrast (the edge of the target image defines a line of contrast whose position can easily be detected and compared to a reference position to generate deviation signals), or even by image correlation: when the operator decides to enter the automatic tracking phase after having manually centered the target in the field of view, the image of this field obtained on the detector 30 is recorded in memory as a reference image and the subsequent images are correlated with the image in memory, with a correlation function involving lateral and vertical shifts of the image, in order to define correlation peaks which allow to know the offset in site and deposit of the subsequent images compared to the initial recorded image.
- a bearing deviation signal is transmitted by the circuit 34 to the amplifier 26 and an elevation deviation signal is provided in the analog path not shown in elevation orientation.
- the angular sensors (28 for orientation in range) send signals to a computer 36 which also receives other information, and the latter processes orientation control signals of a firing weapon, to give to this weapon the same orientation as the sighting device (in the pursuit phase) possibly corrected according to ballistic data such as wind speed, distance from the target, type of shell, etc.
- the angular bearing sensor 18 of the telescope 10 and the angular bearing sensor 28 of the tracking device 20 are connected to the two inputs of a subtractor 38 which generates an error signal used to align the orientations of the telescope and the device of pursuit.
- This error signal is applied to an input of another subtractor 40 which receives on another input a signal called "harmonization error" coming from a memory 42.
- the output signal from subtractor 40 which corresponds to the difference between the orientations of the sighting axes of the telescope and of the tracking device, affected by a harmonization correction, is directed either to the input of the amplifier. 26, in target acquisition phase, ie towards the input of amplifier 16, in automatic tracking phase.
- a switch 44 having a position "A" (for acquisition phase) and "P" (for tracking phase) is provided for this purpose to connect to the input of amplifier 26, ie the output of the subtractor 40 (acquisition position A), ie the output of the deviation measurement circuit 34 (tracking position P).
- a switch 46 makes it possible to direct to the input of the amplifier 16, either the signals from a remote control stick 48 in the acquisition phase (position “A"), or the signals from the subtractor 40 in tracking phase (position “P").
- the tracking device automatically follows the orientation of the telescope which is manually controlled, while in the tracking phase the telescope automatically follows the orientation of the tracking device which is controlled by its deviation circuit.
- a third switch 50 is inserted between the input of the amplifier 16 and the switch 46, this switch having a normal position "N” and a so-called setting position "C"; in the normal position N, the signals from the remote control stick 48 or the subtractor 40 are transmitted to the input of the amplifier 16; but, in setting position C, these signals are interrupted and other signals are applied to the input of the amplifier 16 which are output signals from a deviation circuit 52 whose input comes from a detector of the laser beam 54 carried by the telescope 10.
- the detector 54 is advantageously of the four quadrant type. It is placed on the telescope behind a focusing and possibly selective filtering optics of a particular laser wavelength, so that if a laser beam arrives in the axis or parallel to the line of sight of the telescope, this beam falls in the center of the detector 54, while if the laser beam does not arrive completely parallel to the axis, it falls on a non-central portion of the detector, which then provides signals corresponding to the deviation in elevation and in bearing from the center of the detector; these signals are processed by the deviation circuit 52 and applied to the input of the amplifier 16 but only in the so-called setting position (switch 50 in position C).
- the laser beam received comes from the reflection on an obstacle of a beam emitted by a laser illuminator 56 arranged to emit parallel to the line of sight 32 (or along this line) of the tracking device; thus, the deviation signals from circuit 52 are an indication of the offset of the points targeted by the telescope and the tracking device.
- the deviation signals of the circuit 52 are also applied to an input of a subtractor 58 which also receives the output of the subtractor 38; the output of the subtractor 58 is applied, optionally through a switch 60 having a setting position C in which it is closed (and a normal open position), to the input of the memory 42 for recording there, in the setting phase, the signal supplied by the subtractor 58 and which represents the harmonization difference between the telescope and the tracking device.
- a switch 62 can be provided to connect the output of the memory 42 to the input of the subtractor 40 (normal position N: switch closed, setting position C: switch open).
- the circuit which has just been described with reference to FIG. 1 makes it possible to execute a target acquisition phase and an automatic tracking phase.
- the operator can carry out an action of readjusting the orientation of the telescope as follows: he chooses an obstacle situated at a distance 'corresponding to a normal target distance and he points the tracking device 20 on this obstacle, preferably using the remote control handle 49 (switch 44 in position il).
- the telescope is then oriented so as to center, if possible, on the detector 54 the laser beam received after reflection on the target obstacle, and a so-called harmonization error value corresponding to the angular difference is recorded in the memory. which must exist between the angular sensors 18 and 28 so that the tracking device and the telescope aim at the same point (which in this case is the obstacle targeted during the setting phase).
- This harmonization error takes into account the parallax and other positioning or adjustment errors of the sensors, as well as the deformation of the structure of the carrier helicopter.
- this harmonization error is restored by the memory 42 and transmitted as a correction signal to the amplifier 26 in the acquisition phase or to the amplifier 16 in the phase of pursuit.
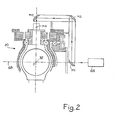
- FIG. 2 shows by way of indication how the optical path of a laser beam can be arranged so that it leaves the tracking device 20 parallel to the line of sight 32 thereof, the tracking device carries, as a means of laser illumination, several deflection mirrors, the actual laser illuminator, 66, being fixed and able to be deported.
- a first mirror M1 secured to a mobile support rotating around the axis of rotation in elevation (68), returns the laser beam to a second mirror M2, then a third mirror M3, secured to the same support.
- the beam received by M3 is directed towards a fourth mirror M4 mounted on the optical sighting assembly (movable in elevation and in bearing) of the tracking device 20.
- the optical elements of the tracking device 20 have not been shown to simplify the figure.
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Telescopes (AREA)
Abstract
Description
- La présente invention concerne un système de conduite de tir, et plus précisément un système de visée et de poursuite automatique de cible, particulièrement adapté à une utilisation sur aéronef (hélicoptère de combat notamment).
- Dans un système de conduite de tir, un opérateur doit d'abord rechercher une cible à détruire, en utilisant notamment une lunette d'observation grossissante dont il assure l'orientation en site et en gisement au moyen d'un manche de télécommande agissant sur des moteurs d'orientation de la lunette.
- L'opérateur envoie à un dispositif de poursuite automatique, pendant cette phase de recherche ou à la fin de cette phase, un ordre d'orientation forcée du dispositif de poursuite selon l'axe de la lunette ; puis il décide de passer en phase de poursuite automatique et envoie au dispositif de poursuite un ordre d'orientation automatique sur une cible repérée. Le dispositif de poursuite comporte, en vue d'assurer l'exécution de ce dernier point, d'une part une optique de visée fournissant une image (vidéo par exemple) de la cible, et d'autre part des circuits d'écartométrie fonctionnant par exemple par contraste ou par corrélation, qui repèrent les déplacements de l'image de la cible dans le champ de l'optique de visée et qui assurent l'orientation adéquate du dispositif de poursuite pour ramener cette image de cible dans l'axe de visée.
- Des informations sur la direction prise par le dispositif de poursuite sont transmises en permanence, avec éventuellement des corrections de tir appropriées, à une arme de destruction qui vise donc la cible tant que celle-ci reste centrée dans l'axe de visée du dispositif de poursuite, et l'opérateur peut à tout moment envoyer un ordre de tir.
- Il est souhaitable que la lunette grossissante suive les déplacements du dispositif de poursuite lorsque celui-ci exécute une phase de poursuite automatique, pour que l'opérateur puisse utiliser la lunette comme moyen de contrôle visuel de la bonne exécution de la poursuite. Par exemple, en cas de perte de la cible par le dispositif de poursuite (passage derrrière un rideau d'arbres etc..), l'opérateur doit pouvoir reprendre le contrôle immédiatement ou vérifier que le dispositif de poursuite rattrape tout seul la cible perdue (à la sortie du rideau d'arbres par exemple).
- D'autre part, lorsque l'opérateur vise une cible avec la lunette, et demande au dispositif de poursuite de viser la même cible, il faut que l'optique de la lunette et l'optique du dispositif de poursuite visent bien le même point, sans quoi l'opérateur doit exécuter une phase supplémentaire de contrôle ou de recalage de l'image donnée par le dispositif de poursuite avant de passer en phase de poursuite.
- Comme la lunette est grossissante, une erreur d'angle même faible entre les deux optiques peut avoir des conséquences pratiques très gênantes.
- Or, plusieurs raisons concourrent à créer de telles erreurs et notamment l'erreur de parallaxe entre la lunette et l'optique du dispositif de poursuite qui, à partir de deux positions proches mais différentes, visent le même point, ou encore des erreurs angulaires dues à la déformation mécanique de la structure de l'hélicoptère qui porte le système de conduite de tir.
- Pour résoudre ces problèmes, la présente invention propose un système de conduite de tir comprenant un dispositif de poursuite automatique orientable en site et en gisement et pourvu de capteurs angulaires repérant son orientation en site et en gisement, et une lunette grossissante d'observation pourvue de moteurs d'orientation en site et en gisement et de capteurs angulaires repérant son orientation en site et en gisement, avec les particularités suivantes :
- - le dispositif de poursuite porte un moyen d'illumination laser susceptible d'émettre un rayonnement laser parallèlement à l'axe de visée d2 ce dispositif ;
- - la lunette porte un détecteur de rayonnement laser couplé à un circuit d'écartométrie associé susceptible de fournir un couple de signaux d'erreur représentant l'écart en site et en gisement entre le centre du détecteur (qui représente la ligne de visée de la lunette) et le point de focalisation du rayonnement laser reçu par la lunette après réflexion sur un obstacle ;
- - une mémoire est prévue pour recevoir et enregistrer ces signaux d'erreur dans une phase de recalage pendant laquelle le moyen d'illumination laser émet ;
- - un circuit électrique est prévu pour recevoir des informations issues des capteurs angulaires du dispositif de poursuite et de la lunette, ainsi que de la mémoire, et pour fournir aux moteurs d'orientation de la lunette, dans une phase de poursuite automatique, des signaux de commande tendant à faire suivre par la lunette les mouvements en site et en gisement du dispositif de poursuite, avec une correction correspondant aux signaux d'erreur enregistrés en mémoire pendant la phase de recalage.
- Ce recalage permet de s'affranchir efficacement des erreurs de parallaxe et des erreurs dues aux déformations de la structure de l'aéronef. Il a l'avantage de pouvoir se faire en utilisant comme moyen d'illumination laser le télémètre à laser qui est souvent prévu dans un système de conduite de tir (pour élaborer des corrections balistiques de tir en fonction de la distance de la cible), à condition que ce télémètre à laser émette effectivement parallèlement à l'axe du dispositif de visée ou même précisément selon l'axe de celui-ci.
- D'autres caractéristiques et avantages de l'invention apparaîtront à la lecture de la description détaillée qui suit et qui est faite en référence aux dessins annexés dans lesquels :
- - la figure 1 représente un schéma de principe de l'invention,
- - la figure 2 représente schématiquement une possibilité d'agencement d'un moyen d'émission laser émettant parallèlement à l'axe optique d'un dispositif de poursuite automatique.
- Le système de conduite de tir, monté par exemple sur un hélicoptère, comprend un certain nombre d'éléments dont on décrira seulement ceux qui sont nécessaires à la compréhension de l'invention. Par exemple on ne décrira pas tous les systèmes de visualisation dont le système de conduite de tir peut être pourvu pour aider l'opérateur ou le pilote.
- Parmi les éléments représentés à la figure 1, on trouve une lunette d'observation grossissante 10, orientable en site et en gisement par des moteurs qui sont de préférence des moteurs- couples à entraînement électromagnétique pour éviter la présence d'engrenages dans la transmission du mouvement. La lunette 10 peut d'ailleurs être gyrostabilisée, c'est à dire qu'on applique des signaux de commande d'orientation à ces moteurs non pas directement mais par l'intermédiaire de gyromètres (gyromètres simples ou intégrateurs ou encore gyroscopes à deux axes à suspension accordée) fixés sur la lunette, ces gyromètres ayant pour axes sensibles les axes de rotation en site et en gisement.
- Pour simplifier la description de l'invention, on n'a représenté sur la figure 1 qu'un moteur d'orientation en gisement 12 pour la lunette ; toute la description sera d'ailleurs faite uniquement en référence aux axes de rotation en gisement, étant entendu que deux voies de circuits indépendantes analogues sont nécessaires respectivement pour l'orientation en site et l'orientation en gisement.
- L'axe de rotation en gisement de la lunette 10 est désigné par la référence 14. L'axe de rotation en site serait perpendiculaire au plan de la figure.
- Un amplificateur 16 fournit des signaux de commande au moteur 12 (directement ou par l'intermédiaire d'un système de gyrostabilisation). On verra ci-après d'où viennent ces signaux.
- Un capteur angulaire 18 permet de repérer l'orientation en gisement de la lunette ; bien entendu un autre capteur est prévu pour l'orientation en site.
- Par ailleurs, un dispositif de poursuite automatique 20 constitue un autre élément important du système de conduite de tir. Il est également orientable en site et en gisement (moteur d'orientation en gisement 22) autour d'un axe de rotation en gisement 24 et il est de préférence gyrostabilisé, c'est à dire qu'il reçoit des signaux de commande d'un amplificateur 26 non pas directement mais par l'intermédiaire d'un système de gyrostabilisation (non représenté ici) comprenant des gyromètres ou des gyromètres intégrateurs ou un gyroscope à suspension accordée dont les axes sensibles sont l'axe de rotation en gisement 24 et un axe de rotation en site perpendiculaire au plan de la figure 1. Les moteurs d'entraînement du dispositif de poursuite automatique sont de préférence à entraînement électromagnétique. Des capteurs angulaires d'orientation en gisement (28) et en site (non représenté) sont prévus sur le dispositif de poursuite 20 pour repérer son orientation à tout moment.
- Le dispositif de poursuite comporte un objectif pour former sur un détecteur d'image 30 l'image d'une cible située dans le champ de visée de cet objectif ; l'axe optique de cet objectif est appelé axe de visée du dispositif 20 et est désigné par la référence 32.
- Le détecteur d'image 30, qui peut être un tube vidicon fournissant un signal vidéo ou une matrice de détecteurs photosensibles, fournit des signaux électriques représentant l'image du champ de visée (et notamment de la cible poursuivie) à un circuit d'écartométrie 34 et éventuellement à des écrans de visualisation (moniteur de télévision etc.).
- Le circuit d'écartométrie 34, qui assure la poursuite, élabore des signaux d'écart en site et en gisement représentant l'écart entre la position de la cible dans l'image et une position de référence (par exemple le centre de l'image) ; ces signaux sont destines à l'amplificateur 26 qui commande les moteurs d'orientation du dispositif de visée de manière à ramener l'image de la cible sur la position de référence lorsqu'elle tend à s'en écarter.
- Le circuit d'écartométrie peut fonctionner par contraste (le bord de l'image de la cible définit une ligne de contraste dont la position peut facilement être détectée et comparée à une position de référence pour engendrer des signaux d'écart), ou encore par corrélation d'image : au moment où l'opérateur décide de passer en phase de poursuite automatique après avoir manuellement centré la cible dans le champ de visée, l'image de ce champ obtenue sur le détecteur 30 est enregistrée en mémoire comme image de référence et les images ultérieures sont corrélées avec l'image en mémoire, avec une fonction de corrélation faisant intervenir des décalages latéraux et verticaux de l'image, afin de définir des pics de corrélation qui permettent de connaître le décalage en site et gisement des images ultérieures par rapport à l'image initiale enregistrée.
- Un signal d'écartométrie en gisement est transmis par le circuit 34 à l'amplificateur 26 et un signal d'écartométrie en site est prévu dans la voie analogue non représentée d'orientation en site.
- Les capteurs angulaires (28 pour l'orientation en gisement) envoient des signaux à un calculateur 36 qui reçoit par ailleurs d'autres informations, et celui-ci élabore des signaux de commande d'orientation d'une arme de tir, pour donner à cette arme la même orientation que le dispositif de visée (en phase de poursuite) corrigée éventuellement en fonction de données balistiques telles que la vitesse du vent, la distance de la cible, le type d'obus, etc.
- Le capteur angulaire de gisement 18 de la lunette 10 et le capteur angulaire de gisement 28 du dispositif de poursuite 20 sont reliés aux deux entrées d'un soustracteur 38 qui élabore un signal d'erreur servant à aligner les orientations de la lunette et du dispositif de poursuite. Ce signal d'erreur est appliqué à une entrée d'un autre soustracteur 40 qui reçoit sur une autre entrée un signal dit "d'erreur d'harmonisation" provenant d'une mémoire 42.
- Le signal de sortie du soustracteur 40, qui correspond à l'écart entre les orientations des axes de visée de la lunette et du dispositif de poursuite, affecté d'une correction d'harmonisation, est dirigé soit vers l'entrée de l'amplificateur 26, en phase d'acquisition de cible, soit vers l'entrée de l'amplificateur 16, en phase de poursuite automatique.
- Un commutateur 44 ayant une position "A" (pour phase d'acquisition) et "P" (pour phase de poursuite) est prévu à cet effet pour relier à l'entrée de l'amplificateur 26, soit la sortie du soustracteur 40 (position acquisition A), soit la sortie du circuit d'écartométrie 34 (position poursuite P).
- De même, un commutateur 46 permet de diriger vers l'entrée de l'amplificateur 16, soit les signaux issus d'un manche de télécommande 48 en phase d'acquisition (position "A"), soit les signaux issus du soustracteur 40 en phase de poursuite (position "P").
- Ainsi, en phase d'acquisition de cible, le dispositif de poursuite suit automatiquement l'orientation de la lunette qui est pilotée manuellement, tandis qu'en phase de poursuite la lunette suit automatiquement l'orientation du dispositif de poursuite qui est piloté par son circuit d'écartométrie.
- On peut prévoir aussi que le commutateur 44 ait une troisième position, M, pour diriger vers l'entrée de l'amplificateur 26 des signaux issus d'un autre manche de télécommande manuelle 49.
- Un troisième commutateur 50 est inséré entre l'entrée de l'amplificateur 16 et le commutateur 46, ce commutateur ayant une position normale "N" et une position dite de calage "C" ; en position normale N, les signaux issus du manche de télécommande 48 ou du soustracteur 40 sont transmis à l'entrée de l'amplificateur 16; mais, en position calage C, ces signaux sont interrompus et on applique à l'entrée de l'amplificateur 16 d'autres signaux qui sont des signaux de sortie d'un circuit d'écartométrie 52 dont l'entrée provient d'un détecteur de faisceau laser 54 porté par la lunette 10.
- Le détecteur 54 est avantageusement du type à quatre quadrants. Il se trouve placé sur la lunette derrière une optique de focalisation et éventuellement de filtrage sélectif d'une longueur d'onde particulière de laser, de telle sorte que si un faisceau laser parvient dans l'axe ou parallèlement à l'axe de visée de la lunette, ce faisceau tombe au centre du détecteur 54, tandis que si le rayon laser n'arrive pas tout à fait parallèlement à l'axe, il tombe sur une portion non centrale du détecteur, lequel fournit alors des signaux correspondant à l'écart en site et en gisement par rapport au centre du détecteur; ces signaux sont traités par le circuit d'écartométrie 52 et appliqués à l'entrée de l'amplificateur 16 mais seulement en position dite de calage (commutateur 50 en position C).
- Le faisceau laser reçu provient de la réflexion sur un obstacle d'un faisceau émis par un illuminateur laser 56 agencé pour émettre parallèlement à l'axe de visée 32 (ou selon cet axe) du dispositif de poursuite ; ainsi, les signaux d'écartométrie du circuit 52 sont une indication du décalage des points visés par la lunette et le dispositif de poursuite.
- Les signaux d'écartométrie du circuit 52 sont par ailleurs appliqués à une entrée d'un soustracteur 58 qui reçoit d'autre part la sortie du soustracteur 38 ; la sortie du soustracteur 58 est appliquée, éventuellement à travers un interrupteur 60 ayant une position de calage C dans laquelle il est fermé (et une position normale ouverte), à l'entrée de la mémoire 42 pour y enregistrer, en phase de calage, le signal fourni par le soustracteur 58 et qui représente l'écart d'harmonisation entre la lunette et le dispositif de poursuite.
- Enfin, on peut prévoir un interrupteur 62 pour relier la sortie de la mémoire 42 à l'entrée du soustracteur 40 (position normale N : interrupteur fermé, position de calage C : interrupteur ouvert).
- Quant à la mémoire 42, si elle doit être commandée en écriture, il faut prévoir un signal de commande correspondant pendant la phase de calage au cours de laquelle les commutateurs 50, 60 et 62 sont basculés en position C.
- Le circuit qui vient d'être décrit en référence à la figure 1 permet d'exécuter une phase d'acquisition de cible et une phase de poursuite automatique. De plus, l'opérateur peut procéder à une action de recalage de l'orientation de la lunette de la manière suivante : il choisit un obstacle se situant à une distance 'correspondant à une distance de cible normale et il pointe le dispositif de poursuite 20 sur cet obstacle, de préférence à l'aide du manche de télécommande 49 (commutateur 44 en position il).
- Il donne alors un ordre de passage en phase de calage, qui a pour effet de basculer les commutateurs 50, 60 et 62 de la position normale N à la position calage C, et de faire émettre un rayonnement laser par l'illuminateur 56, puis d'autoriser l'écriture dans la mémoire 42.
- La lunette s'oriente alors de manière à centrer si possible sur le détecteur 54 le faisceau laser reçu après réflexion sur l'obstacle visé, et on enregistre dans la mémoire une valeur dite d'erreur d'harmonisation correspondant essentiellement à l'écart angulaire qui doit exister entre les capteurs angulaires 18 et 28 pour que le dispositif de poursuite et la lunette visent le même point (qui en l'occurrence est l'obstacle visé pendant la phase de calage).
- Cette erreur d'harmonisation tient compte de la parallaxe et d'autres erreurs de positionnement ou de réglage des capteurs, ainsi que de la déformation de la structure de l'hélicoptère porteur.
- Quand on repasse en position normale N des interrupteurs 50, 60 et 62, cette erreur d'harmonisation est restituée par la mémoire 42 et transmise comme signal de correction à l'amplificateur 26 en phase d'acquisition ou à l'amplificateur 16 en phase de poursuite.
- La figure 2 montre à titre indicatif comment on peut agencer le trajet optique d'un faisceau laser pour qu'il sorte du dispositif de poursuite 20 parallèlement à l'axe de visée 32 de ce dernier le dispositif de poursuite porte, comme moyen d'illumination laser, plusieurs miroirs de renvoi, l'illuminateur laser proprement dit, 66, étant fixe et pouvant se trouver déporté. Un premier miroir Ml, solidaire d'un support mobile en rotation autour de l'axe de rotation en site (68), renvoie le faisceau laser vers un deuxième miroir M2, puis un troisième miroir M3, solidaires du même support. Le faisceau reçu par M3 est dirigé vers un quatrième miroir M4 monté sur l'ensemble optique de visée (mobile en site et en gisement) du dispositif de poursuite 20. Le faisceau laser sort parallèlement à l'axe de visée 32 quelle que soit l'orientation en site et en gisement, du fait notamment que les miroirs M1, M3 et M4 sont placés de manière à renvoyer le faisceau soit sur l'axe de rotation en site soit sur l'axe de rotation en gisement. Les éléments optiques du dispositif de poursuite 20 n'ont pas été représentés pour simplifier la figure.
Claims (4)
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR8205247 | 1982-03-26 | ||
| FR8205247A FR2524137B1 (fr) | 1982-03-26 | 1982-03-26 | Systeme de conduite de tir a lunette d'observation asservie par un dispositif de poursuite automatique |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0090713A1 true EP0090713A1 (fr) | 1983-10-05 |
| EP0090713B1 EP0090713B1 (fr) | 1987-01-07 |
Family
ID=9272455
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP19830400570 Expired EP0090713B1 (fr) | 1982-03-26 | 1983-03-18 | Système de conduite de tir à lunette d'observation asservie par un dispositif de poursuite automatique |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP0090713B1 (fr) |
| DE (1) | DE3368979D1 (fr) |
| FR (1) | FR2524137B1 (fr) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2581205A1 (fr) * | 1985-04-24 | 1986-10-31 | Eltro Gmbh | Procede de mise en concordance des axes optoelectroniques d'un appareil a image thermique |
| FR2700840A1 (fr) * | 1992-12-21 | 1994-07-29 | Thomson Csf | Arme à visée stabilisée. |
| WO1995017640A1 (fr) * | 1993-12-21 | 1995-06-29 | Thomson-Csf | Arme a visee stabilisee |
| CN113701561A (zh) * | 2021-08-25 | 2021-11-26 | 西安应用光学研究所 | 用于机载多光谱多光轴光电系统空中动态校轴装置及方法 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103616673B (zh) * | 2013-12-03 | 2016-01-20 | 中国船舶重工集团公司第七一七研究所 | 一种用于激光定向干扰的跟瞄装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2197458A5 (fr) * | 1971-12-17 | 1974-03-22 | Hughes Aircraft Co | |
| FR2230247A5 (fr) * | 1969-11-04 | 1974-12-13 | British Aircraft Corp Ltd | |
| FR2334934A1 (fr) * | 1975-12-09 | 1977-07-08 | Telecommunications Sa | Dispositif de guidage nocturne d'engins autopropulses |
| FR2391482A1 (fr) * | 1977-05-20 | 1978-12-15 | Messerschmitt Boelkow Blohm | Dispositif d'alignement parallele des axes de plusieurs appareils optiques |
| FR2467378A1 (fr) * | 1979-10-13 | 1981-04-17 | Eltro Gmbh | Procede et dispositif d'harmonisation des axes optiques de deux appareils opto-electroniques |
-
1982
- 1982-03-26 FR FR8205247A patent/FR2524137B1/fr not_active Expired
-
1983
- 1983-03-18 EP EP19830400570 patent/EP0090713B1/fr not_active Expired
- 1983-03-18 DE DE8383400570T patent/DE3368979D1/de not_active Expired
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2230247A5 (fr) * | 1969-11-04 | 1974-12-13 | British Aircraft Corp Ltd | |
| FR2197458A5 (fr) * | 1971-12-17 | 1974-03-22 | Hughes Aircraft Co | |
| FR2334934A1 (fr) * | 1975-12-09 | 1977-07-08 | Telecommunications Sa | Dispositif de guidage nocturne d'engins autopropulses |
| FR2391482A1 (fr) * | 1977-05-20 | 1978-12-15 | Messerschmitt Boelkow Blohm | Dispositif d'alignement parallele des axes de plusieurs appareils optiques |
| FR2467378A1 (fr) * | 1979-10-13 | 1981-04-17 | Eltro Gmbh | Procede et dispositif d'harmonisation des axes optiques de deux appareils opto-electroniques |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2581205A1 (fr) * | 1985-04-24 | 1986-10-31 | Eltro Gmbh | Procede de mise en concordance des axes optoelectroniques d'un appareil a image thermique |
| GB2174862A (en) * | 1985-04-24 | 1986-11-12 | Eltro Gmbh | Harmonying the optical axes of combined heat imaging apparatus and sight |
| GB2174862B (en) * | 1985-04-24 | 1989-06-28 | Eltro Gmbh | Axis aligning apparatus |
| FR2700840A1 (fr) * | 1992-12-21 | 1994-07-29 | Thomson Csf | Arme à visée stabilisée. |
| WO1995017640A1 (fr) * | 1993-12-21 | 1995-06-29 | Thomson-Csf | Arme a visee stabilisee |
| CN113701561A (zh) * | 2021-08-25 | 2021-11-26 | 西安应用光学研究所 | 用于机载多光谱多光轴光电系统空中动态校轴装置及方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| FR2524137B1 (fr) | 1986-10-10 |
| EP0090713B1 (fr) | 1987-01-07 |
| FR2524137A1 (fr) | 1983-09-30 |
| DE3368979D1 (en) | 1987-02-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0033679B1 (fr) | Système de désignation d'objectif par laser | |
| KR100310842B1 (ko) | 배경공제를갖는공용개구2색능동추적기 | |
| EP0441079B1 (fr) | Lunette épiscopique modulable et reconfigurable | |
| EP0628780B1 (fr) | Système de visée pour aéronef | |
| EP0165170B1 (fr) | Ensemble de visée optique, de désignation et de poursuite d'objectif | |
| EP3488540B1 (fr) | Systeme combine d'imagerie et de communication par signaux laser | |
| FR2549610A1 (fr) | Appareil pour determiner la direction d'une ligne de visee | |
| FR2655503A1 (fr) | Systeme optoelectronique d'aide aux missions aeriennes d'attaque et de navigation. | |
| FR2639127A1 (fr) | Appareil de traitement electronique d'images pour determiner la distance ou la taille d'un objet | |
| US4173414A (en) | Method and apparatus for correcting the aiming of an optical illuminator on a target | |
| JPH11153398A (ja) | 二色性能動追尾装置 | |
| FR2696838A1 (fr) | Dispositif de pointage d'une cible mobile. | |
| EP1379892B1 (fr) | Systeme de poursuite transistorise par balise modulee | |
| EP0778958B1 (fr) | Systeme de reperage d'orientation d'un instrument d'observation | |
| EP0090713B1 (fr) | Système de conduite de tir à lunette d'observation asservie par un dispositif de poursuite automatique | |
| FR2467378A1 (fr) | Procede et dispositif d'harmonisation des axes optiques de deux appareils opto-electroniques | |
| FR2505477A1 (fr) | Procede et dispositif d'harmonisation des axes d'une arme et d'un viseur | |
| EP0089273B1 (fr) | Système de conduite de tir à double écartométrie | |
| FR2506003A1 (fr) | Systeme de visee | |
| FR2665251A1 (fr) | Systeme de guidage pour missiles. | |
| FR2687791A1 (fr) | Systeme optronique de poursuite tridimensionnelle avec alignement automatique d'un telemetre optique sur la cible. | |
| FR2657154A1 (fr) | Appareil de pointage monte sur casque. | |
| FR2729748A2 (fr) | Dispositif laser pour guider un missile sur une cible | |
| FR2525339A1 (fr) | Dispositif laser pour guider un missile sur une cible | |
| EP3673223B1 (fr) | Instrument d'imagerie pour controler une designation de cible |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): DE GB IT NL Designated state(s): DE GB IT NL |
|
| 17P | Request for examination filed |
Effective date: 19831216 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): DE GB IT |
|
| ITF | It: translation for a ep patent filed | ||
| REF | Corresponds to: |
Ref document number: 3368979 Country of ref document: DE Date of ref document: 19870212 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed | ||
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19881122 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee | ||
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 19930225 Year of fee payment: 11 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Effective date: 19941201 |