-
Die vorliegende Erfindung betrifft ein Verfahren und ein System zum Ermitteln des Füllstandes einer Flüssigkeit in einem insbesondere konischen Behälter mittels zumindest eines Ultraschallsensors.
-
Beispielsweise in der Lebensmittelindustrie aber auch in anderen Bereichen stellt sich häufig die Aufgabe, dass eine Flüssigkeit, die in einem auch als Gebinde bezeichneten Behälter gelagert ist, dem Behälter entnommen werden soll. Dafür kommt beispielsweise eine Schöpfkolbenpumpe zum Einsatz. Es ist jedoch zu vermeiden, dass Luft durch die Pumpe angesaugt wird, wenn der Behälter leer ist.
-
Im Stand der Technik wird deshalb zum Beispiel eine Folgeplattenpumpe eingesetzt, die eine Folgeplatte umfasst, welche auf der Flüssigkeitsoberfläche aufliegt und für einen Luftabschluss sorgt. Eine solche Folgeplatte ist jedoch aufwendig zu montieren, was ein Wechseln des Behälters verlangsamt. Auch ist ein Nachfüllen von Flüssigkeit erschwert. Ferner sind Folgeplattenpumpen nur für zylindrische Behälter geeignet.
-
Alternativ kann eine Restmenge an Flüssigkeit in dem Behälter belassen werden, um ein Ansaugen von Luft zu vermeiden. Dafür kann der Füllstand einer Flüssigkeit in einem Behälter zum Beispiel mittels eines Ultraschallsensors gemessen werden. Flüssigkeiten in der industriellen Anwendung, wie z.B. Klebstoffe, beinhalten häufig flüchtige Stoffe, die verdunsten und sich oberhalb der Flüssigkeitsoberfläche sammeln. Dadurch wird die Schallgeschwindigkeit in diesem Bereich stark verändert, was zu einer erheblichen Messungenauigkeit des Ultraschallsensors führt. Die Schallgeschwindigkeit ist außerdem abhängig von der Temperatur, dem Luftdruck, der Luftfeuchtigkeit und ihrer Zusammensetzung. Vor dem Hintergrund, dass bei leerem Behälter keine Luft in die Pumpe gesaugt werden soll, muss deshalb ein relativ großer Sicherheitsmindestfüllstand eingehalten oder die tatsächliche Schallgeschwindigkeit auf Grundlage einer zusätzlichen Messung, beispielsweise der Luftzusammensetzung, bestimmt werden. Zusätzliche Messungen erfordern jedoch zusätzliche und kostenintensive Sensorik.
-
Es ist eine Aufgabe der Erfindung, ein Verfahren und ein System zu schaffen, mit denen ein Füllstand einer Flüssigkeit in einem Behälter genauer ermittelt werden kann.
-
Diese Aufgabe wird durch ein Verfahren mit den Merkmalen des Anspruchs 1 gelöst. Es ist ein Verfahren zum Ermitteln des Füllstandes einer Flüssigkeit in einem insbesondere konischen Behälter mittels eines Ultraschallsensors vorgesehen. Der Behälter wird dabei derart ausgerichtet, dass ein Boden des Behälters um einen Neigungswinkel schräg in Bezug auf eine horizontale Ebene ausgerichtet ist.
-
Bei Entfernungsmessungen mittels Ultraschall wird im Allgemeinen ein Ultraschallimpuls in Richtung der zu messenden Strecke emittiert, vom am weitesten entfernten Punkt reflektiert und vom Ultraschallsensor wieder detektiert. Bei bekannter Schallgeschwindigkeit im Medium kann aus der Laufzeit des Ultraschallimpulses die Entfernung bestimmt werden. Verlaufen die Flüssigkeitsoberfläche und der Boden des Behälters parallel, ist der Unterschied im reflektierten Ultraschallimpuls nur schwer aufzulösen, da der Boden häufig noch mit Restflüssigkeit bedeckt ist und deshalb den Ultraschallimpuls gleichermaßen reflektiert wie die Flüssigkeitsoberfläche bei höherem Füllstand. Durch die schräge Ausrichtung des Behälters ändert sich der Winkel der reflektierenden Oberfläche beim Übergang zwischen "befüllt" und "leer". Die Reflektion des Ultraschallimpulses zu dem Ultraschallsensor geht also, insbesondere schlagartig, verloren, wenn der Flüssigkeitspegel so weit abgesunken ist, dass zwischen Boden und Ultraschallsensor keine Flüssigkeit mehr vorhanden ist. Dadurch ändert sich das Signal des reflektierten und detektierten Ultraschallimpulses merklich und die Änderung kann erkannt werden und z.B. zur Erkennung eines minimal erlaubten Füllstandes verwendet werden.
-
Hierdurch wird die Erkennung eines minimal erlaubten Füllstandes genauer, sodass der minimal erlaubte Füllstand verringert werden kann, wodurch die Restmenge an Flüssigkeit, welche beispielsweise vor einem Wechsel des Behälters verbleibt, verringert wird.
-
Die Erkennung eines minimalen Füllstandes ist dabei nicht abhängig von den Eigenschaften der Luft zwischen Sensor und Flüssigkeitsoberfläche, insbesondere nicht von der Schallgeschwindigkeit. Deshalb eignet sich das Verfahren für die Füllstandsüberwachung von im Wesentlichen beliebigen Flüssigkeiten. Ferner lässt sich der Füllstand in im Wesentlichen beliebigen Behälterformen ermitteln, wobei der Boden des Behälters jedoch vorteilhaft im Wesentlichen eben ist. Das Verfahren eignet sich insbesondere auch für einen konischen Behälter, da keine Folgeplatte benötigt wird, die einen zylindrischen Behälter voraussetzen würde.
-
Anstatt die Schallgeschwindigkeit für eine genauere Laufzeitmessung gesondert zu messen, lässt sich eine minimal erlaubte Flüssigkeitsmenge also durch die schräge Ausrichtung des Behälters über den Ultraschallsensor allein feststellen. Das Verfahren bzw. das System stellen also eine kostengünstige aber genaue Füllstandsermittlung zur Verfügung.
-
Vorteilhafte Ausführungsformen sind in den abhängigen Ansprüchen, der Beschreibung und den Zeichnungen angegeben.
-
Bei einer Ausführungsform wird der Ultraschallsensor im Wesentlichen senkrecht zu der horizontalen Ebene ausgerichtet. Da sich die Oberfläche der Flüssigkeit grundsätzlich auch horizontal ausrichtet, wird somit sichergestellt, dass der Ultraschallsensor senkrecht zur Oberfläche der Flüssigkeit in dem schrägen Behälter ausgerichtet ist.
-
Bei einer weiteren Ausführungsform weist der Ultraschallsensor eine durch eine Schallhauptrichtung definierte Messachse auf, wobei der Ultraschallsensor relativ zu dem Behälter derart ausgerichtet wird, dass noch eine Restmenge an Flüssigkeit in dem Behälter vorhanden ist, wenn entlang der Messachse keine Flüssigkeit mehr zwischen dem Ultraschallsensor und dem Boden des Behälters vorhanden ist. Die Restmenge kann verhindern, dass Luft in die Flüssigkeitsentnahmeeinrichtung gelangt. Die Messachse verläuft insbesondere senkrecht zu einer Abstrahlfläche des Ultraschallsensors.
-
Für den Behälter kann ein Deckel vorgesehen sein, an dem der Ultraschallsensor angeordnet ist. Der Deckel kann dabei die Flüssigkeit vor äußeren Einflüssen, wie z.B. Verunreinigung, schützen, die Flüssigkeitseigenschaften erhalten und/oder ein unkontrolliertes Verdunsten von, insbesondere gesundheitsschädlichen, Flüssigkeitsbestandteilen verhindern. Durch eine Integration des Ultraschallsensors in den Deckel wird der Ultraschallsensor wirksam relativ zu dem Behälter festgelegt und in definierter Weise ausgerichtet.
-
Der Neigungswinkel kann insbesondere größer als ein Öffnungswinkel einer von dem Ultraschallsensor ausgehenden Hauptschallkeule sein. Dadurch wird sichergestellt, dass im Wesentlichen kein Echo gemessen wird, wenn eine Messachse des Ultraschallsensors auf den schrägen Boden des Behälters trifft. Dieser Zustand kann ein Unterschreiten eines minimal erlaubten Füllstandes markieren.
-
Grundsätzlich ist es vorteilhaft für das Verfahren, wenn der verwendete Ultraschallsensor gut fokussiert ist, also eine relativ schmale Hauptschallkeule mit einem kleinen Öffnungswinkel aufweist. Denn dann verringert sich das gemessene Echo bei sinkendem Füllstand im Wesentlichen schlagartig, wenn keine Flüssigkeit mehr entlang einer Messachse vorhanden ist bzw. der Boden für den Ultraschallsensor unmittelbar sichtbar ist. Die schmale Hauptschallkeule ist jedoch vor allem in einer Ebene vorteilhaft, nämlich in derjenigen, die zur Messachse und zu einer den Neigungswinkel bestimmenden Tangente des Bodens parallel ist. Daher ist es insbesondere vorteilhaft, wenn der Ultraschallsensor eine astigmatische Schallcharakteristik aufweist. Die Hauptschallkeule ist dabei nicht rotationssymmetrisch ausgeprägt, sondern z.B. oval oder elliptisch. Dadurch lässt sich eine gute Fokussierung in einer solchen Ebene ausnutzen, in der die Fokussierung besonders stark ausprägt ist. In einer zu dieser Ebene senkrechten und zur Messachse parallelen Ebene kann dabei eine etwas weniger gute Fokussierung, also ein größerer Öffnungswinkel der Hauptschallkeule, toleriert werden.
-
Der Füllstand kann insbesondere auf Grundlage wiederholter Laufzeitmessungen zwischen einem jeweiligen Aussenden eines Ultraschallimpulses und einem Empfangen eines Echos des Ultraschallimpulses im Wesentlichen kontinuierlich ermittelt werden. Es ist auch denkbar, dass nicht nur ein Ultraschallsensor für das Aussenden eines Impulses und das Empfangen des Echos zuständig ist, sondern dass zwei oder sogar mehr Ultraschallsensoren vorgesehen sind.
-
Bei einer Weiterbildung wird einer Flüssigkeitsentnahmeeinrichtung signalisiert, dass nur noch eine vorbestimmte Restmenge an Flüssigkeit in dem Behälter vorhanden ist, wenn durch den Ultraschallsensor kein oder ein zu geringes Echo zu einem Ultraschallimpuls gemessen wird. Das Verfahren ist dadurch nicht nur auf eine Laufzeitmessung zwischen Impuls und Echo beschränkt, welche anfällig für Veränderungen der Schallgeschwindigkeit ist. Nach Erreichen der Restmenge kann z.B. noch eine vorbestimmte Menge an Flüssigkeit entnommen werden, bevor der Behälter gewechselt oder nachgefüllt wird.
-
Bei einer weiteren Ausführungsform wird der Behälter in Bezug auf eine Flüssigkeitsentnahmeeinrichtung derart ausgerichtet, dass die Flüssigkeitsentnahmeeinrichtung die Flüssigkeit im Wesentlichen an der im schrägen Zustand tiefsten Stelle des Behälters entnimmt. Dadurch wird es ermöglicht, dass eine zum Verhindern des Gelangens von Luft in die Flüssigkeitsentnahmeeinrichtung vorgesehene Restmenge besonders klein sein kann und somit insbesondere ein Verschwenden von Flüssigkeit bei einem Behälterwechsel vermieden wird.
-
Vorteilhaft beträgt der Neigungswinkel zwischen etwa 10° und 20°, insbesondere zwischen etwa 12° und 18°. Dadurch wird eine vorteilhafte Balance gefunden zwischen einer sicheren Erkennung der minimal erlaubten Flüssigkeitsmenge und einer maximal in dem Behälter vorhaltbare Flüssigkeitsmenge, denn diese wird durch einen steileren Neigungswinkel beschränkt. Insbesondere hat sich ein Wert von im Wesentlichen 15° als vorteilhaft erwiesen.
-
Die Aufgabe wird ferner durch ein System zum Ermitteln des Füllstandes einer Flüssigkeit in einem insbesondere konischen Behälter mit den Merkmalen des Anspruchs 10 gelöst. Das System umfasst einen Ultraschallsensor zum Bestimmen des Füllstandes der Flüssigkeit in dem Behälter, und eine Ausrichteinrichtung mittels derer der Behälter derart ausrichtbar ist, dass ein Boden des Behälters um einen Neigungswinkel schräg in Bezug auf eine horizontale Ebene ausgerichtet ist.
-
Die Ausrichteinrichtung kann z.B. als einfacher Keil oder Quader ausgebildet sein, der unter eine Kante des Behälterbodens geschoben wird.
-
Bei einer vorteilhaften Ausführungsform umfasst die Ausrichteinrichtung eine Halterung für den Behälter. Dadurch kann der Boden des Behälters in einem bestimmten, festen Winkel ausgerichtet und der Stand des Behälters in dem System gesichert werden. Die Halterung kann neben dem schrägen Ausrichten auch zur sicheren Festlegung, insbesondere zum Verhindern eines Umkippens des Behälters, ausgebildet sein.
-
Für den Behälter kann ein Deckel vorgesehen sein, an dem der Ultraschallsensor derart angeordnet ist, dass zwischen einer Schallhauptrichtung des Ultraschallsensors und einer Normalen des Bodens ein Winkel vorhanden ist, der im Wesentlichen gleich dem Neigungswinkel ist. Dadurch wird sichergestellt, dass der Ultraschallsensor im Wesentlichen senkrecht zur Oberfläche der Flüssigkeit ausgerichtet ist, wodurch die Messgenauigkeit verbessert wird.
-
Bei einer weiteren Ausführungsform ist der Behälter durch die Ausrichteinrichtung derart ausrichtbar, dass noch eine Restmenge an Flüssigkeit in dem Behälter vorhanden ist, wenn entlang einer durch eine Schallhauptrichtung des Ultraschallsensors definierten Messachse keine Flüssigkeit mehr zwischen dem Ultraschallsensor und dem Boden des Behälters vorhanden ist. Die Restmenge verhindert, dass Luft in die Entnahmeeinrichtung gelangt.
-
Bei einer Weiterbildung ist der Ultraschallsensor, insbesondere an der Ausrichteinrichtung oder an einem Deckel für den Behälter, hängend gelagert, sodass sich der Ultraschallsensor infolge seiner Gewichtskraft im Wesentlichen senkrecht zu der horizontalen Ebene ausrichtet. Dadurch richtet sich der Ultraschallsensor immer selbst richtig aus und der Neigungswinkel kann sich ändern, ohne dass die Funktion der Füllstandsmessung beeinträchtigt wird.
-
Das beanspruchte Verfahren lässt sich auch im Sinne der hierin beschriebenen Ausführungsformen des Systems weiterbilden und umgekehrt lässt sich das beanspruchte System entsprechend den hierin beschriebenen Ausführungsformen des Verfahrens weiterbilden.
-
Die Erfindung wird nachfolgend lediglich beispielhaft anhand der schematischen Zeichnungen erläutert.
-
1 zeigt ein System zum Ermitteln des Füllstandes einer Flüssigkeit in einem Behälter.
-
2 zeigt das System bei einem niedrigen Füllstand.
-
3 zeigt eine Schallcharakteristik eines beispielhaften Ultraschallsensors.
-
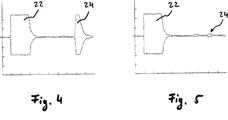
4 zeigt eine Messung eines beispielhaften Ultraschallsensors.
-
5 zeigt die Messung bei einem niedrigen Füllstand.
-
In 1 ist ein System zum Ermitteln des Füllstandes einer Flüssigkeit in einem Behälter 10 gezeigt, der als konischer Eimer ausgeführt ist. Das System umfasst einen Ultraschallsensor 12 und eine Ausrichteinrichtung 26. In dem Behälter 10 befindet sich eine Flüssigkeit, beispielsweise ein hochviskoses Medium, welche eine Flüssigkeitsoberfläche 18 definiert. Zur Entnahme der Flüssigkeit ist eine als Schöpfkolbenpumpe ausgeführte Flüssigkeitsentnahmeeinrichtung 20 vorgesehen, welche an ihrem unteren Ende Flüssigkeit an der tiefsten Stelle des Behälters 10 zwecks Entnahme aus dem Behälter 10 ansaugt.
-
Die Ausrichteinrichtung 26 ist nur schematisch als ein Quader dargestellt, auf dem der Behälter mit einer seitlichen, im Bild linken, Kante erhöht aufliegt. Da der Behälter mit der gegenüberliegenden, im Bild rechten, Kante auf einer tieferen Unterlage, nämlich der horizontalen Ebene 16, aufliegt, steht der Behälter schräg. Zwischen einem Boden 14 des Behälters 10 und der der ebenen Unterlage entsprechenden horizontalen Ebene 16 ist somit ein Neigungswinkel A ausgebildet.
-
Für den Behälter 10 ist ein Deckel 36 vorgesehen, an dem der Ultraschallsensor 12 unter einem solchen Winkel befestigt ist, dass der Ultraschallsensor 12 mit seiner Messachse 34 (siehe 3) senkrecht zu der Flüssigkeitsoberfläche 18 ausgerichtet ist. Der Ultraschallsensor 12 zeigt also mit seiner durch seine Hauptschallrichtung definierten Messachse 34 senkrecht auf die Flüssigkeitsoberfläche 18. Die feste Ausrichtung des Ultraschallsensors 12 in Bezug auf den Behälter 10 erlaubt die Füllstandsmessung mit dem gezeigten System für den Neigungswinkel A. Alternativ kann der Ultraschallsensor 12 hängend gelagert sein, damit sich dieser von selbst senkrecht zur horizontalen Ebene 16 ausrichtet.
-
Die Messaktivität des Ultraschallsensors 12 ist durch zwei Pfeile angedeutet, welche einen vom Ultraschallsensor 12 ausgesandten Impuls 22 und ein Echo 24 symbolisieren. Der Impuls 22 wird von dem Ultraschallsensor 12 entlang seiner Hauptschallrichtung, also im Wesentlichen senkrecht zur Abstrahlfläche, ausgesandt. Der Impuls 22 wird an der Flüssigkeitsoberfläche 18 als Echo 24 reflektiert. Da der Ultraschallsensor 12 senkrecht zu der Flüssigkeitsoberfläche 18 ausgerichtet ist, steht die Hauptschallrichtung des Echos 24 ebenfalls senkrecht zu der Flüssigkeitsoberfläche 18 und es wird ein relativ starkes Echo 24 durch den Ultraschallsensor 12 detektiert.
-
In 2 ist das System der 1 gezeigt, wobei der Füllstand der Flüssigkeit in dem Behälter 10 so niedrig ist, dass entlang der Messachse 34 des Ultraschallsensors 12 keine Flüssigkeit mehr zwischen dem Ultraschallsensor 12 und dem Boden 14 des Behälters 10 vorhanden ist. Die Flüssigkeitsoberfläche 18 liegt also unterhalb eines Punktes, an dem die Messachse 34 des Ultraschallsensors 12 den Boden 14 schneidet.
-
Der von dem Ultraschallsensor 12 ausgesandte Impuls 22 trifft deshalb im Wesentlichen auf den schrägen Boden 14 anstatt auf eine horizontale Flüssigkeitsoberfläche wie zuvor bei 1. Infolgedessen wird ein Echo 24 nicht mehr zurück zum Ultraschallsensor 12, sondern unter einem Reflexionswinkel größer Null, der nämlich gleich dem Neigungswinkel A ist, reflektiert. Dies führt dazu, dass kein Echo 24 oder nur ein sehr geringes Echo 24 von dem Ultraschallsensor 12 detektiert wird, wenn der Impuls 22 auf den Boden 14 anstatt auf eine Flüssigkeitsoberfläche 18 trifft. Dieser Effekt wird ausgenutzt, um einen minimal erlaubten Füllstand, wie er durch die Flüssigkeitsoberfläche 18 in 2 angedeutet ist, mit hoher Genauigkeit zu detektieren. Denn sobald der Bereich des Bodens 14 um die Messachse 34 nicht mehr mit Flüssigkeit bedeckt ist, nimmt der detektierte Pegel des Echos 24 im Wesentlichen schlagartig ab und bei Unterschreiten eines Pegelgrenzwerts für das Echo 24 kann das Erreichen oder Unterschreiten eines minimal erlaubten Füllstandes festgestellt und an die Flüssigkeitsentnahmeeinrichtung signalisiert werden.
-
In 3 ist die Schallcharakteristik eines beispielhaften, in dem System von 1 und 2 einsetzbaren Ultraschallsensors 12 gezeigt. Dabei ist der Schallpegel in Abhängigkeit des Winkels zur Messachse 34 dargestellt. Der Ultraschallsensor 12 bildet eine Hauptschallkeule 28 und zwei Nebenkeulen 38, 40 aus. Die Hauptschallkeule 28 und auch die Nebenschallkeulen 38, 40 sind in der dargestellten Ebene in Bezug auf die Messachse 34 symmetrisch ausgebildet.
-
Durch Strichlinien im oberen Quadranten ist ein vorteilhafter Bereich 32 für den Neigungswinkel A des Behälters 10 angedeutet, der zwischen etwa 12° und 18° liegt. Die untere Strichlinie deutet gleichzeitig einen Öffnungswinkel B der Hauptschallkeule 28 an. Wenn also der Neigungswinkel A in dem vorteilhaften Bereich 32 liegt, also z.B. 15° beträgt, ist der Neigungswinkel A größer als der Öffnungswinkel B, wodurch ein an dem Ultraschallsensors 12 detektiertes Echo 24 im Wesentlichen vermieden wird. Außerdem liegt der vorteilhafte Bereich 32 des Neigungswinkels A auch außerhalb der im Bild oberen Nebenschallkeule 40, sodass auch ausgehend von der Nebenschallkeule 40 im Wesentlichen kein Echo 24 durch den Ultraschallsensor 12 detektiert wird, wenn der ausgesandte Impuls 22 auf den Boden 14 des Behälters 10 trifft.
-
In 3 ist zur Veranschaulichung ferner eine Schallkeule 30 eines mangelhaft fokussierten Ultraschallimpulses dargestellt. Würde ein solcher Impuls an dem Boden 14 reflektiert, würde der Ultraschallsensor weiterhin ein relativ starkes Echo detektieren, wenn keine Flüssigkeit mehr entlang der Messachse 34 zwischen dem Boden 14 und dem Ultraschallsensor 12 vorhanden ist. Daher ist ein gut fokussierender Ultraschallsensor vorteilhaft. Zum Beispiel weist eine vorteilhafte Schallkeule einen Öffnungswinkel von weniger als 12°, insbesondere weniger als 10° auf. Um einen solchen Wert zu erreichen, kann ein Ultraschallsensor 12 mit einer astigmatischen Schallcharakteristik verwendet werden, der beispielsweise in der in den 1 und 2 dargestellten Ebene einen geringen Öffnungswinkel B der Schallkeule aufweist, während in der zur Messachse 34 parallelen aber zur Bildebene der 1 und 2 senkrechten Ebene die Schallkeule einen etwas größeren Öffnungswinkel aufweist.
-
In 4 ist eine beispielhafte Messung eines Ultraschallsensors 12 gezeigt. Die Abszisse stellt die verstrichene Zeit dar und die Ordinate zeigt den Schallpegel an. Zu einem frühen Zeitpunkt wird ein Ultraschallimpuls 22 ausgesandt. In einem gewissen zeitlichen Abstand zum Beginn des Impulses 22 wird ein Echo 24 von dem Ultraschallsensor 12 detektiert. Anhand dieses zeitlichen Abstandes kann bei bekannter Schallgeschwindigkeit der Abstand des reflektierenden Objekts, hier der Flüssigkeitsoberfläche 18, ermittelt werden.
-
In 5 ist eine Messung gezeigt, bei der entsprechend 2 keine Flüssigkeit mehr zwischen dem schrägen Boden 14 und dem Ultraschallsensor 12 entlang seiner Messachse 34 vorhanden ist. Dadurch ist gegenüber 4 ein Echo 24 kaum mehr vorhanden. Z.B.. Bei einer 5 entsprechenden Messung kann also ein erfindungsgemäßes System ein Erreichen oder Unterschreiten eines minimal erlaubten Füllstandes der Flüssigkeitsentnahmeeinrichtung 20 signalisieren.
-
Bezugszeichenliste
-
- 10
- Behälter
- 12
- Ultraschallsensor
- 14
- Boden
- 16
- horizontale Ebene
- 18
- Flüssigkeitsoberfläche
- 20
- Flüssigkeitsentnahmeeinrichtung
- 22
- Impuls
- 24
- Echo
- 26
- Ausrichteinrichtung
- 28
- Hauptschallkeule
- 30
- Schallkeule eines mangelhaft fokussierenden Ultraschallsensors
- 32
- vorteilhafter Bereich des Neigungswinkels
- 34
- Messachse
- 38
- Nebenkeule
- 40
- Nebenkeule
- A
- Neigungswinkel
- B
- Öffnungswinkel