DE102010018122B4 - Movement mechanism, in particular for the transmission of movements or forces or for guiding points of a body on certain tracks - Google Patents
Movement mechanism, in particular for the transmission of movements or forces or for guiding points of a body on certain tracks Download PDFInfo
- Publication number
- DE102010018122B4 DE102010018122B4 DE201010018122 DE102010018122A DE102010018122B4 DE 102010018122 B4 DE102010018122 B4 DE 102010018122B4 DE 201010018122 DE201010018122 DE 201010018122 DE 102010018122 A DE102010018122 A DE 102010018122A DE 102010018122 B4 DE102010018122 B4 DE 102010018122B4
- Authority
- DE
- Germany
- Prior art keywords
- wheels
- stationary
- movement mechanism
- axis
- rotating
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images












Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H7/00—Gearings for conveying rotary motion by endless flexible members
- F16H7/02—Gearings for conveying rotary motion by endless flexible members with belts; with V-belts
- F16H7/023—Gearings for conveying rotary motion by endless flexible members with belts; with V-belts with belts having a toothed contact surface or regularly spaced bosses or hollows for slipless or nearly slipless meshing with complementary profiled contact surface of a pulley
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H19/00—Gearings comprising essentially only toothed gears or friction members and not capable of conveying indefinitely-continuing rotary motion
- F16H19/001—Gearings comprising essentially only toothed gears or friction members and not capable of conveying indefinitely-continuing rotary motion for conveying reciprocating or limited rotary motion
- F16H19/003—Gearings comprising essentially only toothed gears or friction members and not capable of conveying indefinitely-continuing rotary motion for conveying reciprocating or limited rotary motion comprising a flexible member
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H7/00—Gearings for conveying rotary motion by endless flexible members
- F16H7/02—Gearings for conveying rotary motion by endless flexible members with belts; with V-belts
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transmission Devices (AREA)
- Manipulator (AREA)
Abstract
Bewegungsmechanismus (1), insbesondere zur Übertragung von Bewegungen oder Kräften oder zum Führen von Punkten eines Körpers (24) auf bestimmten Bahnen, bei dem auf einer stationären Achse (5) ein Steg (7) mit einem Endbereich (12) und zwei stationäre Räder (4) unabhängig voneinander drehbar gelagert sind, am gegenüberliegenden Endbereich (11) des Steges (7) mindestens eine weitere umlaufende Achse (3) fest an dem Steg (7) und orthogonal zu der stationären Achse (5) angeordnet ist, auf der umlaufenden Achse (3) zwei mit dieser Achse (3) umlaufende Räder (2) unabhängig voneinander drehbar auf der umlaufenden Achse (3) gelagert sind, über die stationären Räder (4) und die umlaufenden Räder (2) ein endloser Riemen (6), die jeweiligen Räder (4, 2) teilweise umschlingend, derart gespannt ist, dass der Riemen (6) immer abwechselnd über das erste der stationären Räder (4), dann über das erste der umlaufenden Räder (2), dann über das zweite der stationären...Movement mechanism (1), in particular for the transmission of movements or forces or for guiding points of a body (24) on certain tracks, in which a web (7) with an end region (12) and two stationary wheels on a stationary axis (5) (4) are rotatably mounted independently of one another, at the opposite end region (11) of the web (7) at least one further circumferential axis (3) is arranged fixedly on the web (7) and orthogonally to the stationary axis (5) on the circumferential one Axle (3) two wheels (2) rotating with this axis (3) are rotatably mounted independently of one another on the rotating axis (3), via the stationary wheels (4) and the rotating wheels (2) an endless belt (6), partially wrapping around the respective wheels (4, 2) so that the belt (6) always alternates over the first of the stationary wheels (4), then over the first of the rotating wheels (2), then over the second of the stationary wheels ...
Description
Die Erfindung betrifft einen Bewegungsmechanismus, insbesondere zur Übertragung von Bewegungen oder Kräften oder zum Führen von Punkten eines Körpers auf bestimmten Bahnen.The invention relates to a movement mechanism, in particular for the transmission of movements or forces or for guiding points of a body on certain tracks.
In der Technik ist eine Vielzahl von Bewegungsmechanismen zur Erzeugung von geforderten Bewegungen bekannt. Je nach den geforderten Bewegungseigenschaften handelt es sich hierbei teilweise um kinematisch sehr komplexe Getriebe.In the art, a variety of movement mechanisms for generating required movements are known. Depending on the required movement properties, these are in some cases kinematically very complex gearboxes.
Für Positionieraufgaben reichen häufig schon weniger komplexe Getriebekonstruktionen, um z. B. die Positionierung eines Handhabungsgerätes in einem Arbeitsraum zu gewährleisten. Bei einer Vielzahl von Bewegungsaufgaben kommt es vor allem darauf an, den Aufbau des Getriebes möglichst einfach zu gestalten, um eine kostengünstige Herstellung und einen zuverlässigen Betrieb zu gewährleisten. Auch sind Positioniergenauigkeit und Wiederholbarkeit der Bewegungen von hoher Bedeutung.For positioning often enough even less complex gear structures to z. B. to ensure the positioning of a handling device in a work space. In a variety of motion tasks, it is particularly important to make the construction of the transmission as simple as possible to ensure cost-effective production and reliable operation. Positioning accuracy and repeatability of movements are also very important.
Aus dem Fachbuch Stölting, H. D./Kallenbach, E. „Handbuch elektrische Kleinantriebe”, Hanser-Verlag, Seite 339 ist ein Kreuzantrieb bekannt, bei dem zwei senkrecht zueinander stehende Zahnradpaare über einen sich tordierenden Zahnriemen in drehender Verbindung miteinander stehen. Eine entsprechende Kinematik eines Winkelgetriebes ist auch aus dem Fachbuch von Thomas Nagel, „Zahnriemengetriebe”, Hanser-Verlag auf Seite 88 bekannt. Anwendungen derartiger Kreuzantriebe sind aber nicht beschrieben.From the textbook Stölting, H.D./Kallenbach, E. "Manual Electric Small Drives", Hanser-Verlag, page 339, a cross-drive is known in which two mutually perpendicular gear pairs via a tordierenden toothed belt in rotating connection with each other. A corresponding kinematics of an angle gear is also known from the textbook by Thomas Nagel, "Zahnriemengetriebe", Hanser Verlag on page 88. Applications of such cross drives are not described.
Weiterhin sind aus der
Aufgabe der vorliegenden Erfindung ist es daher, einen Bewegungsmechanismus zur Übertragung von Bewegungen oder Kräften oder zum Führen von Punkten eines Körpers auf bestimmten Bahnen zur Verfügung zu stellen, der einfach aufgebaut und mit hoher Zuverlässigkeit zu betreiben ist.It is therefore an object of the present invention to provide a moving mechanism for transmitting motions or forces or for guiding points of a body on certain lanes, which is simple in construction and can be operated with high reliability.
Die Lösung der erfindungsgemäßen Aufgabe ergibt sich aus den Merkmalen des Anspruches 1. Weitere vorteilhafte Ausgestaltungen der Erfindung ergeben sich aus den Unteransprüchen.The solution of the object according to the invention results from the features of
Die Erfindung geht aus von einem Bewegungsmechanismus, insbesondere zur Übertragung von Bewegungen oder Kräften oder zum Führen von Punkten eines Körpers auf bestimmten Bahnen. Bei dem erfindungsgemäßen Bewegungsmechanismus sind auf einer stationären Achse ein Steg mit einem Endbereich und zwei stationäre Räder unabhängig voneinander drehbar gelagert, am gegenüberliegenden Endbereich des Steges ist mindestens eine weitere umlaufende Achse fest an dem Steg und orthogonal zu der stationären Achse angeordnet, auf der umlaufenden Achse sind zwei mit dieser Achse umlaufende Räder unabhängig voneinander drehbar auf der umlaufenden Achse gelagert, über die stationären Räder und die umlaufenden Räder ist ein endloser Riemen, die jeweiligen Räder teilweise umschlingend, derart gespannt, dass der Riemen immer abwechselnd über das erste der stationären Räder, dann über das erste der umlaufenden Räder, dann über das zweite der stationären Räder und über das zweite der umlaufenden Räder wieder zurück zum ersten der stationären Räder läuft. Durch den Aufbau und die Funktionsweise des erfindungsgemäßen Bewegungsmechanismus' ist es möglich, abhängig von der Drehung und der Drehrichtung der stationären Räder die Drehung des Steges oder der umlaufenden Räder direkt zu beeinflussen. Bei einem hinsichtlich des Drehsinnes gleichsinnigen Antreiben der stationären Räder mit vorzugsweise gleich großen Winkelgeschwindigkeiten ergibt sich aufgrund der Kinematik des Bewegungsmechanismus' eine reine Drehung des Stegs ohne Eigendrehung der umlaufenden Räder um die umlaufende Achse. Werden hingegen die stationären Räder hinsichtlich des Drehsinnes gegensinnig angetrieben, insbesondere mit entgegengesetzt gleich großen Winkelgeschwindigkeiten, so resultiert hieraus eine gegenläufige Drehbewegung der umlaufenden Räder auf ihrer zusammen mit dem Steg unbeweglichen Achse, d. h. es bewegen sich nur die umlaufenden Räder ortsfest an dem ebenfalls ortsfesten Steg. Diese beiden Grenzfälle der Bewegung (nur der Steg dreht sich oder nur die umlaufenden Räder drehen sich um den ortsfesten Steg) kann durch Veränderung der Drehrichtungen und der Drehgeschwindigkeiten der beiden stationären Räder zu beliebigen Positionierbewegungen eines Koppelpunktes an den umlaufenden Rädern genutzt werden. So bewegt sich in weiterer Ausgestaltung ein mit einem der umlaufenden Räder fest verbundener Koppelpunkt bei einer beliebigen Drehbewegung der stationären Räder auf einer räumlichen Bahn, wobei die Summe aller möglichen Bahnen des Koppelpunktes die Oberfläche eines Torus ist. Innerhalb dieser Hüllfläche des Torus kann ein mit einem der umlaufenden Räder fest verbundener Koppelpunkt jeden Punkt auf der Hüllfläche des Torus erreichen und so z. B. einen mit einem der umlaufenden Räder verbundenen Gegenstand positionieren. Der Hauptvorteil des Bewegungsmechanismus' ist die Eigenschaft, eine räumliche zweiachsige Bewegung mittels zweier stationärer Antriebe durchführen zu können. Damit ist der erfindungsgemäße Bewegungsmechanismus mit dem Hexapod-Handhabungsgerät vergleichbar, der seine Popularität eben jener Eigenschaft verdankt. Als weiterer Vorteil ist die Linearität des Übertragungsverhaltens hervorzuheben, d. h. der Bewegungsmechanismus ist gleichförmig übersetzend ausgebildet. Die Auslegung einer zugehörigen Steuerung ist dadurch sehr einfach. Der erfindungsgemäße Bewegungsmechanismus besitzt primär als Führungs- bzw. Positioniergetriebe gute Eigenschaften. Hierbei können einerseits die stationären Räder angetrieben werden, um einen oder zwei mit den umlaufenden Rädern fest verbundene Koppelpunkt(e) zu positionieren. Andererseits kann auch ein Koppelpunkt auf seiner räumlichen Koppelfläche geführt und seine jeweilige Position an den Winkelstellungen der stationären Räder abgelesen werden. Ein Einsatz des erfindungsgemäßen Bewegungsmechanismus' ist z. B. in folgenden Bereichen denkbar: Positionieraufgaben, Handhabungsaufgaben, räumlicher Orientierungsausgleich, oszillierende bzw. taumelnde, vollständig umlaufende Drehbewegungen. Ebenfalls ist es denkbar, dass der Bewegungsmechanismus als Leistungsübertragungsgetriebe einsetzbar ist.The invention is based on a movement mechanism, in particular for the transmission of movements or forces or for guiding points of a body on certain paths. In the movement mechanism according to the invention on a stationary axis, a web with an end portion and two stationary wheels are rotatably supported independently, at the opposite end of the web at least one further circumferential axis is fixedly disposed on the web and orthogonal to the stationary axis, on the rotating axis two wheels rotating with this axle are independently rotatably mounted on the revolving axle, over the stationary wheels and the revolving wheels an endless belt, partially wrapping around the respective wheels, is stretched so that the belt always alternately over the first of the stationary wheels, then over the first of the revolving wheels, then over the second of the stationary wheels and over the second of the revolving wheels back to the first of the stationary wheels. Due to the structure and operation of the movement mechanism according to the invention ', it is possible to directly influence the rotation of the web or the rotating wheels, depending on the rotation and the direction of rotation of the stationary wheels. In a direction of rotation in the same sense driving the stationary wheels with preferably equal angular velocities results due to the kinematics of the movement mechanism 'a pure rotation of the web without rotation of the rotating wheels to the rotating axis. If, however, the stationary wheels are driven in opposite directions with respect to the direction of rotation, in particular with opposite equal angular velocities, this results in an opposite rotational movement of the revolving wheels on their immovable together with the web axis, ie only the revolving wheels move stationary on the also stationary web , These two limiting cases of the movement (only the web rotates or only the rotating wheels rotate around the stationary web) can be used by changing the directions of rotation and the rotational speeds of the two stationary wheels to arbitrary positioning movements of a crosspoint on the rotating wheels. Thus, in a further embodiment, a coupling point fixedly connected to one of the revolving wheels moves on an arbitrary rotational movement of the stationary wheels on a spatial path, the sum of all possible paths of the coupling point being the surface of a torus. Within this envelope surface of the torus, a crosspoint fixedly connected to one of the revolving wheels can reach any point on the envelope surface of the torus and so z. B. position an object connected to one of the revolving wheels. The main advantage of the movement mechanism is the property of being able to perform a spatial biaxial movement by means of two stationary drives. Thus, the movement mechanism according to the invention is comparable to the hexapod handling device, which owes its popularity just that property. Another advantage is the linearity of the transmission behavior to emphasize, ie the movement mechanism is uniformly translating formed. The design of an associated control is very simple. The movement mechanism of the invention has primarily as a guide or positioning good properties. Here, on the one hand, the stationary wheels are driven to position one or two fixed to the rotating wheels cross-coupling point (s). On the other hand, a crosspoint can be performed on its spatial coupling surface and its respective position can be read at the angular positions of the stationary wheels. An insert of the movement mechanism according to the invention 'is z. B. conceivable in the following areas: positioning tasks, handling tasks, spatial orientation compensation, oscillating or tumbling, completely rotating rotational movements. It is also conceivable that the movement mechanism can be used as a power transmission gear.
Von Vorteil ist es, wenn die stationäre Achse in einem Gestell ortsfest gelagert ist. Damit lässt sich der Bewegungsmechanismus stationär verankert aufbauen und damit auch große Lasten oder Gewichte sicher abstützen. Weiterer Vorteil derartiger stationärer Antriebe ist es, dass diese nicht mitbewegt werden müssen, wie es z. B. bei seriellen Achsen üblicher Industrieroboter der Fall ist.It is advantageous if the stationary axis is mounted stationary in a frame. This allows the movement mechanism to be anchored in a stationary manner and thus safely supporting even large loads or weights. Another advantage of such stationary drives is that they do not have to be moved, as z. B. is the case with serial axes of conventional industrial robots.
In weiterer Ausgestaltung ist es denkbar, dass der Steg auf der stationären Achse etwa mittig angeordnet und beidseitig jeweils von einem stationären Rad umgeben ist. Sowohl der Steg als auch die vorzugsweise beidseitig des Stegs angeordneten stationären Räder sind dabei frei drehbar auf der stationären Achse gelagert, etwa mittels Gleitlagern, Wälzlagern oder dgl. und können sich dadurch unabhängig voneinander und unabhängig von der raumfest angeordneten stationären Achse drehen. Weiterhin ist es denkbar, dass der Steg an der umlaufenden Achse etwa mittig festgelegt und beidseitig jeweils von einem umlaufenden Rad umgeben ist. Der Steg und die umlaufende Achse sind dabei derart aneinander festgelegt, dass eine Relativbewegung von Steg und umlaufender Achse nicht möglich ist. Die vorzugsweise beidseitig des fest an der umlaufenden Achse festgelegten Stegs angeordneten umlaufenden Räder sind hingegen drehbar auf der umlaufenden Achse befestigt, z. B. wiederum über Gleitlager, Wälzlager oder dgl. Lagerungen. Dadurch können sich die umlaufenden Räder relativ zu dem an der umlaufenden Achse festgelegten Steg verdrehen.In a further embodiment, it is conceivable that the web is arranged approximately centrally on the stationary axis and is surrounded on both sides by a stationary wheel. Both the web and preferably arranged on both sides of the web stationary wheels are freely rotatably mounted on the stationary axis, such as by means of plain bearings, rolling bearings or the like. And can thereby rotate independently and independently of the fixed space stationary axis arranged. Furthermore, it is conceivable that the web is fixed approximately centrally on the revolving axis and is surrounded on both sides by a revolving wheel. The web and the circumferential axis are fixed to each other in such a way that a relative movement of the web and the circumferential axis is not possible. The preferably arranged on both sides of the fixed fixed to the circumferential axis web arranged peripheral wheels, however, are rotatably mounted on the rotating axis, z. B. in turn via plain bearings, bearings or the like. Storage. As a result, the rotating wheels can rotate relative to the web fixed to the rotating axis.
Besonders einfach ist die Kinematik des erfindungsgemäßen Bewegungsmechanismus', wenn die stationären Räder und die umlaufenden Räder jeweils denselben Durchmesser aufweisen. Dann bewirkt eine Umdrehung eines der stationären Räder genau eine Umdrehung einer der umlaufenden Räder, sofern man möglichen Schlupf aufgrund des Riementriebs vernachlässigt. In anderer Ausgestaltung ist es aber auch denkbar, dass die stationären Räder und die umlaufenden Räder jeweils einen unterschiedlichen Durchmesser aufweisen, so dass zwischen Antriebsdrehung und Abtriebsdrehung eine Übersetzung einstellbar ist. Abhängig von dem Durchmesserverhältnis zwischen stationären Rädern und umlaufenden Rädern ist dabei eine Übersetzung z. B. einer Antriebsdrehung ins Schnelle oder ins Langsame möglich, also eine Übersetzung oder eine Untersetzung.Particularly simple is the kinematics of the movement mechanism according to the invention 'when the stationary wheels and the rotating wheels each have the same diameter. Then, one turn of one of the stationary wheels causes exactly one revolution of one of the revolving wheels, as long as possible slip due to the belt drive is neglected. In another embodiment, it is also conceivable that the stationary wheels and the rotating wheels each have a different diameter, so that between transmission rotation and output rotation, a translation is adjustable. Depending on the diameter ratio between stationary wheels and rotating wheels while a translation z. B. a drive rotation to fast or slow, so a translation or a reduction.
In weiterer Ausgestaltung kann der Riemen ein Rundriemen, ein Flachriemen oder ein Zahnriemen sein.In a further embodiment, the belt may be a round belt, a flat belt or a toothed belt.
Die konstruktive Ausbildung des erfindungsgemäßen Bewegungsmechanismus' kann zunächst in der Art des Riemens variieren. Der Rundriemen wird während des Betriebs nicht tordiert, was als Vorteil angeführt werden kann. Nachteilig ist der nicht schlupffreie Betrieb. Weitere Riemenvarianten sind der ebenfalls schlupfanfällige Flachriemen, sowie der schlupffreie Zahnriemen. Hier muss der Riemen in den freien Abschnitten zwischen den in Abfolge überlaufenen stationären Rädern und den umlaufenden Rädern jeweils eine Verdrehung um 90° vollführen. Dabei ist besonders bei Zahnriemen auf einen hinreichenden Achsabstand zu achten. Der verwendete Riementrieb bringt weitere Vorteile bei Betriebsgeräuschen, Leichtbau, Schmiermittelfreiheit und Miniaturisierung. Grundsätzlich lässt sich der erfindungsgemäße Bewegungsmechanismus mit allen drei Riemenvarianten betreiben, welche bei unterschiedlichen Einsatzfällen jeweilige Vorteile besitzen. Die Forderung einer hohen Positioniergenauigkeit spricht beispielsweise für den Einsatz von Zahnriemen. Handhabungsvorgänge mit Kraft- oder Momentenbegrenzung dagegen für Flach- oder Rundriemen.The structural design of the movement mechanism according to the invention may initially vary in the type of belt. The round belt is not twisted during operation, which can be cited as an advantage. The disadvantage is not slip-free operation. Other belt variants are the slip-prone flat belts, as well as the slip-free timing belt. Here the belt must rotate 90 ° in the free sections between the sequentially overrun stationary wheels and the revolving wheels. It is important to pay attention to a sufficient center distance especially with timing belts. The belt drive used brings further advantages in terms of operating noise, lightweight construction, freedom from lubricant and miniaturization. In principle, the movement mechanism according to the invention can be operated with all three belt variants, which have respective advantages in different applications. The requirement of a high positioning accuracy speaks for example for the use of timing belts. Handling operations with force or torque limitation, however, for flat or round belts.
In weiterer Ausgestaltung ist es bei Verwendung von Zahnriemen als Riemen denkbar, dass der Zahnriemen zwei zueinander um 90° versetzte Verzahnungen aufweist. Hierdurch kann gewährleistet werden, dass der Zahnriemen nicht tordiert werden muss, um nacheinander in den freien Abschnitten zwischen den in Abfolge überlaufenen stationären Rädern und den umlaufenden Rädern die üblicherweise nur eine Verzahnung eines herkömmlichen Zahnriemens in Eingriff mit den jeweiligen Verzahnungen der Räder zu bringen. Statt dessen kämmen die Verzahnungen der stationären Räder mit einer der beiden Verzahnungen eines derartigen Zahnriemens eines erfindungsgemäßen Bewegungsmechanismus', während die Verzahnungen der umlaufenden Räder mit der dazu senkrecht angeordneten anderen Verzahnung eines derartigen Zahnriemens kämmen. Hierdurch wird verhindert, dass der Zahnriemen tordiert, so dass die Torsionsbelastung eines derartigen Zahnriemens deutlich reduziert oder verhindert wird.In a further embodiment, when using a toothed belt as a belt, it is conceivable for the toothed belt to have two toothings offset by 90 ° with respect to each other. In this way it can be ensured that the toothed belt does not have to be twisted, in order successively in the free sections between the continuous overflowed stationary wheels and the revolving wheels usually only one toothing a conventional toothed belt to engage with the respective teeth of the wheels. Instead, mesh the teeth of the stationary wheels with one of the two teeth of such a toothed belt of a movement mechanism 'according to the invention, while meshing the teeth of the revolving wheels with the other teeth arranged perpendicularly such a toothed belt. This prevents the toothed belt from twisting, so that the torsional load of such a toothed belt is significantly reduced or prevented.
In weiterer Ausgestaltung ist es auch denkbar, dass an dem einen Ende des Steges zwei umlaufende Achsen angeordnet sind, die zueinander V-förmig um einen Winkelbetrag versetzt sind. Dabei können weiterhin die umlaufenden Räder jeweils einzeln auf den zwei getrennten Achsen angeordnet sein, die an den zueinander versetzten Enden des Steges an den Enden des Steges festgelegt sind. Die umlaufenden Räder müssen nicht notwendigerweise auf einer gemeinsamen Achse angeordnet sein. Vielmehr können ihre Achsen einen Winkel einschließen. Der Steg nimmt dann eine V-förmige Gestalt an.In a further embodiment, it is also conceivable that two circumferential axes are arranged at one end of the web, which are offset from each other in an V-shape by an angular amount. In this case, furthermore, the revolving wheels can each be arranged individually on the two separate axes, which are fixed at the staggered ends of the web at the ends of the web. The revolving wheels do not necessarily have to be arranged on a common axis. Rather, their axes can include an angle. The bridge then assumes a V-shaped shape.
Weiterhin müssen die umlaufenden Räder nicht um eine mit den stationären Rädern zusammenfallende Achse drehen. Vielmehr kann der Steg sogar ganz wegfallen und eine kardanische Bewegung der nicht stationären Räder realisiert werden. Das Übertragungsverhalten ist in diesem Falle allerdings nicht mehr linear und der Mechanismus verliert seine Eigenschaft der gleichförmigen Übersetzung.Furthermore, the rotating wheels do not have to rotate about an axis coincident with the stationary wheels. Rather, the bridge can even drop completely and a gimbal movement of the non-stationary wheels can be realized. However, the transfer behavior in this case is no longer linear and the mechanism loses its characteristic of uniform translation.
Eine besonders bevorzugte Ausführungsform des erfindungsgemäßen Bewegungsmechanismus' zeigt die Zeichnung.A particularly preferred embodiment of the movement mechanism according to the invention 'shows the drawing.
Es zeigen:Show it:
In den Figuren sind verschiedene Ausgestaltungen des erfindungsgemäßen, im Ganzen mit der Sachnummer
Anhand von
Der im wesentlichen längserstreckte und an der stationären Achse
Der Flachriemen
Die Wirkungsweise des Bewegungsmechanismus'
Die Kinematik bzw. die Bewegungscharakteristik und die Belastungsgröße des erfindungsgemäßen Bewegungsmechanismus'
Nach der üblichen Definition eines Getriebes ist der erfindungsgemäße Bewegungsmechanismus
Eine Betrachtung des vorliegenden Mechanismus als Übertragungsgetriebe führt zu einer Zuordnung zu gleichförmig übersetzenden Getrieben. Wählt man die Lage der Achsen
Hinsichtlich der Übersetzungsverhältnisse ist unter Bezugnahme auf
Wenn gemäß 
If according to
Wegen des Freiheitsgrades F = 2 bewegt sich ein mit einem der umlaufenden Räder
Die Funktion der Koppelfläche ergibt sich aus der mathematischen Gleichung des zugehörigen Torus 


Hinsichtlich der Kräfte und Momente an dem erfindungsgemäßen Bewegungsmechanismus
In einer einfachen Betrachtung werden die Kräfte in den Abschnitten des Riemens
In a simple consideration, the forces are in the sections of the
Als vorgegebene äußere Belastungen wirken die Momente MΘ1, MΘ2 auf die umlaufenden Räder sowie das Stegmoment MΨ. Der Riemen
Die Gleichgewichtsbedingungen für die vier Räder 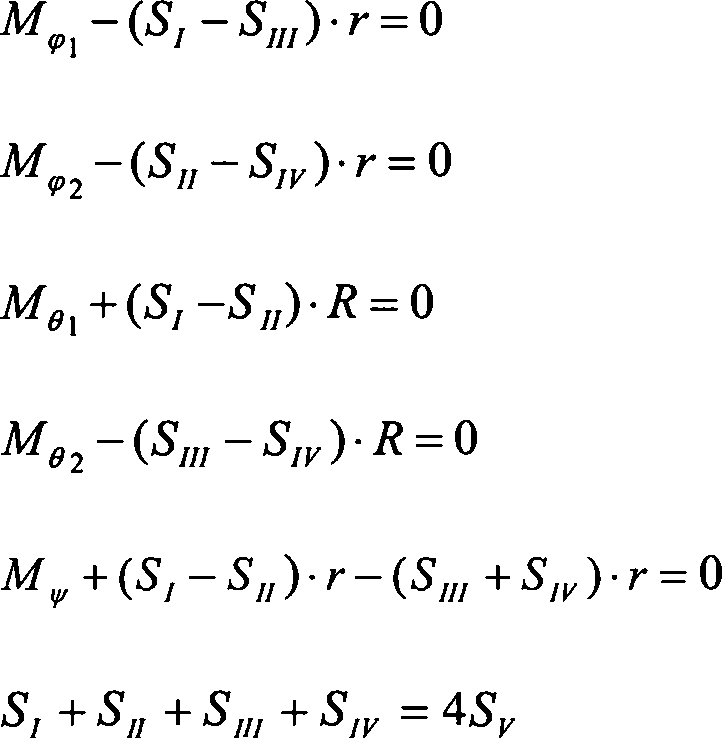
Hieraus ergeben sich die notwendigen AntriebsmomenteThis results in the necessary drive torques

Der erfindungsgemäße Bewegungsmechanismus
Dabei kann der erfindungsgemäße Bewegungsmechanismus
So ist z. B. in der
Besonders einfach lässt sich der erfindungsgemäße Bewegungsmechanismus
In der
Werden die beiden Antriebsmotoren nun so angesteuert, dass sich die stationären Räder
In der
In der
In der
Ein anderes schematisch dargestelltes Beispiel für die Anwendung eines erfindungsgemäßen Bewegungsmechanismus'
Das Greifen des Gegenstandes
BezugszeichenlisteLIST OF REFERENCE NUMBERS
- 11
- Bewegungsmechanismusmovement mechanism
- 22
- umlaufende Räderrotating wheels
- 33
- umlaufende Achserevolving axis
- 44
- stationäre Räderstationary wheels
- 55
- stationäre Achsestationary axis
- 66
- Flachriemenflat belts
- 77
- Stegweb
- 88th
- Gestellframe
- 99
- Grundplattebaseplate
- 1010
- Wälzlagerungroller bearing
- 1111
- Endbereich Steg zu umlaufenden RädernEnd area bridge to revolving wheels
- 1212
- Endbereich Steg zu stationären RädernEnd area bridge to stationary wheels
- 1313
- Drehbewegung um die stationäre AchseRotary movement about the stationary axis
- 1414
- Drehbewegung um die umlaufende AchseRotary movement around the rotating axis
- 1515
- Umlaufrichtung FlachriemenCirculation direction flat belt
- 1616
- Verzahnunggearing
- 1717
- Zahnriementoothed belt
- 1818
- Antriebsmotorendrive motors
- 1919
- Antriebsriemendrive belts
- 2020
- Achseaxis
- 2121
- FlugsimulatorFlight simulator
- 2222
- Handhabungseinrichtunghandling device
- 2323
- Greiferbackengripper jaws
- 2424
- Gegenstandobject
- 2525
- Bewegungsbahn RotationMotion path rotation
- 2626
- Bewegung Öffnen/SchließenMovement open / close
- 2727
- Torustorus
Claims (17)
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE201010018122 DE102010018122B4 (en) | 2010-04-22 | 2010-04-22 | Movement mechanism, in particular for the transmission of movements or forces or for guiding points of a body on certain tracks |
| PCT/DE2011/000453 WO2011131177A1 (en) | 2010-04-22 | 2011-04-20 | Movement mechanism, in particular for transmitting the movement or forces or for guiding points of a body on specific paths |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE201010018122 DE102010018122B4 (en) | 2010-04-22 | 2010-04-22 | Movement mechanism, in particular for the transmission of movements or forces or for guiding points of a body on certain tracks |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| DE102010018122A1 DE102010018122A1 (en) | 2011-10-27 |
| DE102010018122B4 true DE102010018122B4 (en) | 2012-09-20 |
Family
ID=44359694
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| DE201010018122 Expired - Fee Related DE102010018122B4 (en) | 2010-04-22 | 2010-04-22 | Movement mechanism, in particular for the transmission of movements or forces or for guiding points of a body on certain tracks |
Country Status (2)
| Country | Link |
|---|---|
| DE (1) | DE102010018122B4 (en) |
| WO (1) | WO2011131177A1 (en) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ES2917775T3 (en) * | 2017-06-26 | 2022-07-11 | Acc Innovation Ab | Rotor Flying Vehicle |
| CN109630629B (en) * | 2019-01-22 | 2023-12-15 | 天津大学 | Modular wire winding system of wire driving mechanism |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3543608A (en) * | 1968-12-06 | 1970-12-01 | Roger W Meihak | Belt driven differential |
| DE69813753T2 (en) * | 1997-07-29 | 2004-01-29 | Gates Corp | BELT DIFFERENTIAL. |
| WO2009138731A1 (en) * | 2008-05-15 | 2009-11-19 | Samuel Lesley | Hand- propelled vehicle with belt differential |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH044298Y2 (en) * | 1986-02-27 | 1992-02-07 |
-
2010
- 2010-04-22 DE DE201010018122 patent/DE102010018122B4/en not_active Expired - Fee Related
-
2011
- 2011-04-20 WO PCT/DE2011/000453 patent/WO2011131177A1/en active Application Filing
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3543608A (en) * | 1968-12-06 | 1970-12-01 | Roger W Meihak | Belt driven differential |
| DE69813753T2 (en) * | 1997-07-29 | 2004-01-29 | Gates Corp | BELT DIFFERENTIAL. |
| WO2009138731A1 (en) * | 2008-05-15 | 2009-11-19 | Samuel Lesley | Hand- propelled vehicle with belt differential |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102010018122A1 (en) | 2011-10-27 |
| WO2011131177A1 (en) | 2011-10-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE2945189C2 (en) | Mechanical arm | |
| EP2513510B1 (en) | Transmission | |
| DE2927956B1 (en) | Wind or hydropower device | |
| DE2249894A1 (en) | MOTOR-CONTROLLED MANIPULATOR | |
| DE102014221518B4 (en) | Robotic arm and robot with robotic arm | |
| EP2397279A1 (en) | Articulated arm robot with arm drive | |
| DE102012214599B4 (en) | Low stroke operation for a serial robot | |
| DE102012015051A1 (en) | planetary gear | |
| DE3228945A1 (en) | DEVICE FOR DRIVING THE TWO AXES OF THE HAND MEMBER OF AN INDUSTRIAL ROBOT | |
| EP3122519A1 (en) | Parallel robot and control method | |
| EP0118845B1 (en) | Tool outfit for moving objects | |
| DE102010018122B4 (en) | Movement mechanism, in particular for the transmission of movements or forces or for guiding points of a body on certain tracks | |
| EP3585572B1 (en) | Robot gripper having a drive device | |
| EP1606535A1 (en) | Gearbox device | |
| DE4241273C2 (en) | Drive device for converting rotary movements into linear movements and vice versa | |
| DE10327352A1 (en) | Device for the transmission of kinematic forces with several cables and single drive pinion and use in the actuation of the movable elements of a motor vehicle roof | |
| EP0733175B1 (en) | Synchronous belt drive | |
| DE202008015150U1 (en) | Coaxial transmission | |
| DE102008029696A1 (en) | Gear e.g. planetary gear, for use in e.g. industrial robot, has ring shaped-transformation element with continuous, axially aligned openings that are crossed in contact-free manner by spacer units | |
| DE102013112802B4 (en) | Robotic arm with flexible tension element | |
| DE4410322A1 (en) | Muscle-powered drive device | |
| DE102006017752A1 (en) | Two-dimensional positioning drive e.g. rotatable telescope arm, for use in biotechnology field, has carriage with cantilever arm rotated around rotational axis, and pair of engines attached to drive unit | |
| DE3308475A1 (en) | Robot arm with multiple joints - has second and third parts of arm actuated by motors mounted in stationary base | |
| DE498254C (en) | Gearboxes, especially for motor vehicles | |
| DE1803916C3 (en) | SeU or cable winch |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| R016 | Response to examination communication | ||
| R018 | Grant decision by examination section/examining division | ||
| R020 | Patent grant now final |
Effective date: 20121221 |
|
| R119 | Application deemed withdrawn, or ip right lapsed, due to non-payment of renewal fee |