CN214451663U - 一种水上篙式设备系统 - Google Patents
一种水上篙式设备系统 Download PDFInfo
- Publication number
- CN214451663U CN214451663U CN202022921527.1U CN202022921527U CN214451663U CN 214451663 U CN214451663 U CN 214451663U CN 202022921527 U CN202022921527 U CN 202022921527U CN 214451663 U CN214451663 U CN 214451663U
- Authority
- CN
- China
- Prior art keywords
- rod
- combined
- dragging
- towing
- block
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn - After Issue
Links
- 230000007246 mechanism Effects 0.000 claims abstract description 50
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 claims abstract description 42
- 238000000926 separation method Methods 0.000 claims description 13
- 238000012544 monitoring process Methods 0.000 claims description 9
- 241000252254 Catostomidae Species 0.000 claims description 6
- 238000009434 installation Methods 0.000 claims description 6
- 230000033001 locomotion Effects 0.000 claims description 6
- 238000005096 rolling process Methods 0.000 claims description 5
- 230000001133 acceleration Effects 0.000 claims description 3
- 230000000694 effects Effects 0.000 abstract description 5
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 abstract 2
- 238000000034 method Methods 0.000 description 10
- 230000009471 action Effects 0.000 description 8
- 230000008569 process Effects 0.000 description 8
- 238000010586 diagram Methods 0.000 description 6
- 238000006243 chemical reaction Methods 0.000 description 5
- 230000008859 change Effects 0.000 description 4
- 238000012423 maintenance Methods 0.000 description 4
- 238000004519 manufacturing process Methods 0.000 description 4
- 239000000463 material Substances 0.000 description 4
- 239000011120 plywood Substances 0.000 description 4
- 229910000831 Steel Inorganic materials 0.000 description 3
- 230000006378 damage Effects 0.000 description 3
- 239000010959 steel Substances 0.000 description 3
- 208000027418 Wounds and injury Diseases 0.000 description 2
- 238000010276 construction Methods 0.000 description 2
- 239000000446 fuel Substances 0.000 description 2
- 230000003116 impacting effect Effects 0.000 description 2
- 238000001179 sorption measurement Methods 0.000 description 2
- 239000000126 substance Substances 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 229920000049 Carbon (fiber) Polymers 0.000 description 1
- 239000000956 alloy Substances 0.000 description 1
- 229910045601 alloy Inorganic materials 0.000 description 1
- 230000004075 alteration Effects 0.000 description 1
- 230000003321 amplification Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 239000004917 carbon fiber Substances 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000005265 energy consumption Methods 0.000 description 1
- 238000003912 environmental pollution Methods 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 208000014674 injury Diseases 0.000 description 1
- VNWKTOKETHGBQD-UHFFFAOYSA-N methane Chemical compound C VNWKTOKETHGBQD-UHFFFAOYSA-N 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
Images









Landscapes
- Earth Drilling (AREA)
Abstract
本实用新型公开了一种水上篙式设备系统,包括控制系统和工作系统,所述工作系统包括基座,在基座设有座体,在座体上安装有转盘,在转盘上安装有顶拖杆支撑座,在顶拖杆支撑座上设有至少两个液压顶升装置,在液压顶升装置的顶部设有滑套,顶拖杆机构设有顶拖杆,顶拖杆装在滑套上,顶拖杆上装有驱动组件,顶拖杆机构的前端装有受力端头机构,受力端头设有端头架,端头架的正面设置为顶拖面,端头架的背面沿其周向方向设有若干个端头角度调节机构。本实用新型可以通过远程或现场遥控操作,进行有人或无人参与完成有人船舶、自动航行船舶关于靠、系、离、移泊及船舶定位作业操作和解决方案;取代或部分取代港拖船舶在协助大型船舶的功能和作用。
Description
技术领域
本实用新型涉及一种船舶辅助设备,特别涉及一种安装于船舶、港口码头水上设施,用于船舶与船舶或船舶与码头之间进行靠、系、离泊作业、航行补给辅助、船舶安保设备、航向保持和改变和避免或减轻船舶碰撞设备进行使用的水上篙式设备系统。
背景技术
船,作为一种由人类智慧创造出来,拥有几千年古老历史的水上交通运输工具,在对小型船舶操纵和驱动最简易的工具就是船篙,只需一个人使用一根长杆就可以完成船舶所需要的撑、划和航向控制动作,再在长杆的前端加上一个钩,就可以再添加一个拉拽的动作。这也是现今小型船舶上广泛使用的人力船篙形状。
现今随着水上船舶吨位大型化和超大型化迅速发展壮大。人力使用和驱动的船篙,不管是力量还是作用的范围,都已经无法适应现代化船舶作业的需要。这也是人力使用的船篙在现代大型船舶消失的主要原因。而现代化船舶在靠、系、离泊过程中需要大量专业人员精力和设备(港口系泊设施和拖轮)的投入。在操纵船舶过程要求复杂严格,需要经验丰富的船长或引航员才能胜任,且大型、超大型船舶在靠、离泊过程中需要一艘至八艘拖轮在旁顶拖协助。而一旦操作失误,极易造成船舶碰撞事故,进而造成船舶和码头设施的损坏。船舶在靠、系、离泊船舶或码头作业过程中,在旁协助顶、拖的拖轮马力与数量也有严格要求。
新造一艘港口作业5200马力柴油型全回旋拖轮造价约3000万-5000千万,全船至少配备船长及以下高级船员6人、普通船员9人,共计15人。船员年薪资及保险需要约:150万,每年维持运行需要的能源花费约:200万,年运营花费共计约:350万。以上未包含船舶维修养护、船舶保险和有专业资质船公司管理支援费用。其他如占用码头泊位、航道、环境污染、海事公共服务资源等。且船舶主机发出功率变为船舶推进有效功率后已损失了将近一半,具体参数如下:螺旋桨收到功率DHP与机器功率MHP的比值称为传递效率,其值通常为0.95-0.98;有效功率EHP与收到功率DHP之比称为推进器效率,该值约为0.60-0.75;有效功率EHP与机器功率MHP之比称为推进系数,该值一般为0.5-0.7。
无人船舶航行目前已基本解决航行技术难题,但无人船舶在靠、离泊作业过程中,需要精确的外部风力、风向、水流等数据,因靠近岸边而产生的岸吸效应,和周围船舶航行引起的水流变化。和海浪撞击岸边返回的向外冲击力。对船舶操纵的外界影响因素多而复杂。且靠、离泊作业前所需要的系、解缆绳还是需要专业人员在船,和与被靠、离泊的船舶或码头上专业熟练人员配合系、解缆绳,才能完成以上作业,无法真正实现其全程自动无人船舶作业航行。
实用新型内容
本实用新型所要解决的技术问题是针对现有技术和方法的不足,提供一种用于船舶与船舶或船舶与码头之间进行靠、系、离泊作业,和避免或减轻船舶碰撞设备进行使用,安装在船舶时,除可以具备以上功能外,还可作为船舶调整和保持航向的独立或辅助舵设备以及两艘船舶之间横向补给固定辅助、安保功能的水上篙式设备系统。
本实用新型所要解决的技术问题是通过以下的技术方案来实现的,本实用新型是一种水上篙式设备系统,其特点是:包括控制系统和工作系统,所述工作系统包括基座,在基座上装有顶拖杆机构,在顶拖杆机构的前端装有受力端头机构;
所述基座设有座体,在座体上安装有转盘,用以调整机构水平方向转动。在转盘上安装有顶拖杆支撑座,所述顶拖杆支撑座的中心通过支撑万向节与转盘相连,所述顶拖杆支撑座的正面设置为支撑面,在支撑面的同一中心轴线上设有至少两个支撑顶拖杆机构的液压顶升装置,液压顶升装置驱动支撑顶拖杆机构上下摆动,在液压顶升装置的顶部设有滑套,在顶拖杆支撑座的背面沿其周向方向设有若干个支撑座角度调节机构,所述支撑座角度调节机构包括若干支撑座液压顶升气缸,支撑座液压顶升气缸的一端固定安装在转盘上,支撑座液压顶升气缸活塞杆的端部固定安装在顶拖杆支撑座的背面;所述座体可以设为移动式座体,移动方式可为轨道式、轮式或履带式;所述座体也可以设为固定式座体,固定方式为永久固定式或可拆卸搬运式,通过调整顶拖杆所需要的上下仰俯、左右倾斜、左右水平角度,控制此设备至所需作业位置与角度;
所述顶拖杆机构设有顶拖杆,顶拖杆装在滑套上,在顶拖杆上装有驱动顶拖杆沿着滑套前后水平移动的驱动组件;所述顶拖杆的类型根据工作需求和场所限制,进行优化选择,顶拖杆的横向剖面可为圆形、椭圆形、正方形、长方形、三角形、梯形、工字型等各种形状;
所述受力端头设有端头架,所述端头架通过万向节与顶拖杆端部相连,所述端头架的正面设置为顶拖面,在端头架的背面沿其周向方向设有若干个端头角度调节机构;
所述控制系统包括主控制器和传感系统,传感系统与主控制器相连,所述传感系统包括安装在受力端头上用于测量与被测船舶或码头之间相对船速、船向、横摇、纵摇、横荡、纵荡、垂荡数据的采集系统,以及安装在转盘中用于测量转盘旋转角度的角度传感器和安装在基座上用于监控外部环境信息的监控系统。所述主控制器收集和处理传感系统的数据,接收和执行控制人员命令,进而对电源系统进行控制,对液压顶升装置进行上下仰俯角度和左右倾斜角度调整、对转盘进行左右水平角度转动调整和对顶拖杆伸出长度和速度调整和控制,使其达到工作所需要求。
本实用新型所要解决的技术问题还可以通过以下的技术方案来实现,所述顶拖杆的侧下部设有沿其长度方向设置、与滑套相配合的滑轨,所述驱动组件包括设在顶拖杆的侧上部并沿其长度方向设置的齿条,在顶拖杆外侧设有若干个与齿条啮合的齿轮,每个齿轮均与装在转盘上的驱动电机相连。通过驱动电机使齿轮驱动齿条运动,从而驱动顶拖杆调整至工作的长度,驱动电机的动力来源可为燃油机、电动机、液压驱动等,由工作所在场所环境和要求进行调整。
本实用新型所要解决的技术问题还可以通过以下的技术方案来实现,所述顶拖面上设有软垫或者若干个吸盘,在顶拖面的中心处设有辅助件孔,在端头架上装有顶拖辅助件,顶拖辅助件通过伸缩气缸驱动伸出辅助件孔或者缩回到端头架内。顶拖杆顶推操作时可以直接用吸盘吸住被作用物上进行顶撑操作,当需要拉拽操作时,可以将顶拖辅助件伸出与船体或者码头上的固定物相连,进行拉拽操作。
优选所述顶拖辅助件为拉钩或者拉环,所述吸盘设有若干个,均匀设在顶拖面的辅助件孔四周,每个吸盘的高度相同。也可以在端头架内部安装电磁线圈通电产生磁吸力,或这在顶拖面的底部抽吸至真空,利用大气压产生吸力,以满足作业所需要的摩擦力、顶推力、拉拽力。
优选所述端头角度调节机构包括若干液压顶升气缸,液压顶升气缸的一端固定安装在顶拖杆上,液压顶升气缸活塞杆的端部固定安装在端头架的背面。
本实用新型所要解决的技术问题还可以通过以下的技术方案来实现,所述采集系统包括运动姿态传感器、加速度传感器、方位传感器、压力传感器和温度传感器;所述监控系统包括超声波雷达、毫米波雷达、激光雷达和全景摄像头。在顶拖杆上开有使传感系统的传输信号线通过的信号线槽,以方便传感系统与与主控制器相连。
本实用新型所要解决的技术问题还可以通过以下的技术方案来实现,所述顶拖杆为硬式长顶拖杆,硬式长顶拖杆设有硬杆体,所述齿条沿其长度方向竖向并排设在硬杆体至少一侧的上部,所述滑轨设在齿条下方的硬杆体上,在硬杆体上设有传感系统导线安装孔。硬式长顶拖杆具有结构简单,维护方便,制造成本低等优点。
本实用新型所要解决的技术问题还可以通过以下的技术方案来实现,所述顶拖杆为伸缩式顶拖杆,所述伸缩式顶拖杆包括主杆和多个套装在主杆中的单缸插销式伸缩杆,端头架通过万向节与第一节单缸插销式伸缩杆端部相连,最后一节单缸插销式伸缩杆与主杆相连,所述齿条沿其长度方向竖向并排设在主杆至少一侧的上部,所述滑轨设在齿条下方的主杆上。伸缩式顶拖杆在伸出时可先将主杆利用齿轮伸出最长,如工作需要可再伸出最前部的单缸插销式伸缩杆,然后伸出次一节,在次一节伸至极限后再伸出次一节,以此类推。伸缩式顶拖杆收纳方便,能够保证可以伸至工作所需要的长度、速度、力度,从而使其完成顶拖停动作。
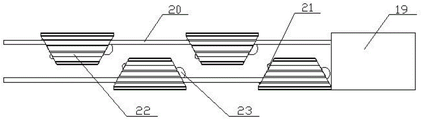
本实用新型所要解决的技术问题还可以通过以下的技术方案来实现,所述顶拖杆为组合式顶拖杆,所述组合式顶拖杆包括基础杆,在基础杆的末端连接有组合杆,组合杆由两条相互啮合的单串顶拖缆构成,在基础杆和组合杆相接处设有啮合或者分离两个单串顶拖缆的合并器,所述两条单串顶拖缆的另一端分别连接在顶拖缆绞盘上,两个单串顶拖缆通过合并器啮合构成组合杆,组合杆与基础杆连接构成组合式顶拖杆。组合式顶拖杆具有占用空间最小,柔韧性大,作业范围远等优点。
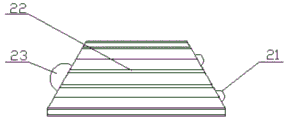
所述单串顶拖缆包括若干个顶拖块,所述顶拖块的内部设有顶拖块固定装置活动室,在顶拖块固定装置活动室内安装有顶拖块固定装置,相邻两个顶拖块之间连接有带筋,所述带筋设在顶拖块的上表面上,所述顶拖块的两侧面设置为与另一条单串顶拖缆上的顶拖块相互啮合的啮合部,一侧的啮合部的中心处设有向外凸出的主啮合凸块,在主啮合凸块的两侧均开有与顶拖块固定装置相配合的顶拖块固定装置通孔,在主啮合凸块两侧的啮合部上设有向顶拖块内凹陷的辅助啮合凹槽,同一顶拖块的另一侧的啮合部上设有与主啮合凸块和辅助啮合凹槽相对应的主啮合凹槽和辅助啮合凸块,在主啮合凹槽的两侧均开有与顶拖块固定装置相配合的顶拖块固定槽;在每个顶拖块的正面沿其中心轴线设有导线安装槽,在导线安装槽的一侧设有带筋弧形导槽,导槽的开口方向与两个顶拖块啮合方向相同;所述齿条沿基础杆长度方向竖向并排设在基础杆至少一侧的上部,所述滑轨设在齿条下方的基础杆上,在每个顶拖块的两端面上设有竖齿,两条相互啮合的单串顶拖缆上的竖齿与前述齿条平行并构成一条连续的齿条,在两条单串顶拖缆的两侧下部均设有沿其长度方向设置与滑套相配合的顶拖缆滑轨。所述带筋和顶拖块的材料为高强度化纤、碳纤维、合金等,其目的为在工作时起到固定组合体和抵消工作需要的拉拽力。
使用时,驱动电机驱动基础杆上的齿条使其向前运动,从而带动组合杆向前移动,组合杆的两条单串顶拖缆在经过合并器时相互啮合构成。在啮合过程中,两条单串顶拖缆分别从两个单串顶拖缆入口进入,经过连接件后经过挤压,主啮合凸块、辅助啮合凹槽分别与主啮合凹槽、辅助啮合凸块相互啮合构成组合杆从组合式顶拖杆啮合口出来。
本实用新型所要解决的技术问题还可以通过以下的技术方案来实现,所述合并器包括上、下合板和连接在上、下合板之间的三角锥形连接件,所述上、下合板靠近顶拖缆绞盘的一端构成组合式顶拖杆分离口,所述三角锥形连接件设在组合式顶拖杆分离口处,将分离口分成两个单串顶拖缆入口,所述上、下合板靠近基础杆的一端构成组合式顶拖杆啮合口,所述组合式顶拖杆啮合口的宽度小于组合式顶拖杆分离口的宽度,所述组合式顶拖杆啮合口的宽度等于组合式顶拖杆的宽度。
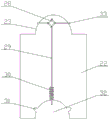
本实用新型所要解决的技术问题还可以通过以下的技术方案来实现,所述顶拖块固定装置包括由四根支撑辊相互铰接构成的四边形撑合装置,所述四边形撑合装置上构成了四个铰接点,其中一个铰接点设为固定铰接点,固定铰接点固定在顶拖块固定装置活动室的内壁上,与固定铰接点相对的铰接点铰接有推杆,推杆的尾端伸出至主啮合凹槽中,在推杆的下部套设有复位弹簧,复位弹簧的一端固定在主啮合凹槽的底部,另一端固定在推杆上;所述四边形撑合装置上的另外两个铰接点均铰接有钩杆,所述钩杆通过顶拖块固定装置通孔伸进到相邻顶拖块的顶拖块固定槽内,使相邻的两个顶拖块相固定。
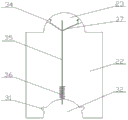
本实用新型所要解决的技术问题还可以通过以下的技术方案来实现,所述顶拖块固定装置包括设在顶拖块中心轴线上的推拉杆,推拉杆的尾端伸出至主啮合凹槽中,所述推拉杆的头端通过两个连杆分别铰接有两个固定钩块,所述固定钩块的上端铰接在顶拖块固定装置活动室的内壁上,所述固定钩块可以通过顶拖块固定装置通孔伸进到相邻顶拖块的顶拖块固定槽内,使两个相邻的顶拖块相固定;固定钩块的上端铰接处设有限位块,在靠近限位块的顶拖块固定装置活动室内壁上设有与限位块相配合的挡块,所述推拉杆的下部外套有推拉复位弹簧,推拉复位弹簧的一端固定在主啮合凹槽的底部,另一端固定在推拉杆上。
本实用新型所要解决的技术问题还可以通过以下的技术方案来实现,所述顶拖杆为组合式顶拖杆,所述组合式顶拖杆包括基础顶杆,在基础顶杆的末端连接有若干组合块,基础顶杆与组合块、组合块与组合块之间均连接有连接筋,所述连接筋设在组合块的上表面上,所述组合块的前后两侧面设为与相邻组合块相互啮合的组合部,所述组合块的前侧面设有向外凸出的凸块,所述凸块上设有向上倾斜的斜钩,组合块的后侧面设有与相邻组合块的斜凸块相配合的凹槽,所述基础顶杆的末端设有与相邻组合块的斜凸块相配合的基础凹槽,在基础顶杆和组合杆相接处设有啮合或者分离所有组合块的组合器,所述组合式顶拖杆的另一端分别连接在组合式顶拖杆绞盘上,组合块通过组合器啮合与基础顶杆连接构成组合式顶拖杆;
所述齿条沿基础顶杆长度方向竖向并排设在基础顶杆的一侧上部,所述滑轨设在齿条下方的基础顶杆上,在每个组合块的两端面上设有竖齿,所述竖齿与前述齿条构成一条连续的组合齿条,在竖齿的下部设有沿组合式顶拖杆长度方向设置与滑套相配合的组合滑轨,在每个组合块的正面沿其中心轴线设有导线放置槽。
优选所述组合器包括相互连接的啮合进部与啮合出部,啮合进部与啮合出部之间的夹角为95°-175°,啮合进部设在靠近组合式顶拖杆绞盘的一侧,啮合出部设在靠近基础顶杆的一侧,啮合进部上设有啮合进口,啮合出部上设有啮合出口。
使用时,驱动电机驱动基础顶杆上的齿条使其向前运动,从而带动组合块,后一个组合块经过组合器啮合进部,使其凸块斜插入前一个组合块的凹槽中,经过啮合出部的时候,放平实现连接,构成一个组合式顶拖杆。
靠泊作业时,船舶进入顶拖杆机构的作业范围内,伸出顶拖杆与船体或码头进行连接固定;同时,在伸出顶拖杆时也可带缆绳,增强其拖拽能力。调整长杆与船舶或码头受力方向,并对船舶进行拖拽、顶推,调整和控制船位和船速,缓慢靠上码头,或将船舶停留在操作人员预设位置,进行装卸载,完成靠泊作业。减小留港时间,提高港口使用率。
离泊作业时,传统船舶离泊前需要进行“单绑”操作,所谓“单绑”操作就是将缆绳解除至船舶靠泊的最低需求,前后缆绳2-4根,正常船舶靠泊6-16根。有此设备系统时可省掉单绑操作。即在码头时,在船舶首尾部各放1台放篙式设备。受力端头机构采用抓扣、真空吸附、电磁吸附或以上三种任意组合将其与之固牢,直接一次性进行解缆操作。等待开航指令。在得到开航命令后,全部顶拖杆设备在电脑计算下,在船体钢板受力范围内,整体均匀加速,并按照船舶操纵者的要求,将船位调整至需要船体角度,直至到达船舶操纵者的位置,或至顶拖杆机构操作极限长度,顶拖杆的受力端与之脱离接触,完成离泊作业。
系泊作业时,船舶系泊停靠于船舶或码头,在船舶首、中、尾各安装1台及以上篙式设备,使其之间相互连接固定。按照靠泊船舶的排水量和外界风、流、浪涌对船体影响,计算出所需要的系留力,设置安排顶拖系统,利用受力传感器,受力方向传感器,经电脑处理器算计,使顶拖杆在伸缩力量和方向上调整至最佳位置。
移泊作业时,船舶在港口码头有时因作业需要进行船位移动。在原泊位进行船舶前、后、左、右移动,移动方向分在原船位同一直线和转向移泊。在2台及以上移动篙式设备操作下,采用固定船舶--顶离码头--移动船舶--固定船舶的方式,可快速完成船舶简单和复杂移泊作业。降低船员劳动强度、提高效率、能耗减少,操作简单方便。
该设备还具有舵功能,该设备是使用船篙原理,就有其自带的拉拽、顶推功能,也带有保持和改变航向的能力。将受力端头和顶拖杆伸长放入水面以下,使其对水流产生阻力,进而对杆体产生反作用力,由于杆体伸长浸入水中部分远离船体中心纵向线上,构成杠杆放大效应。从而得到控制和改变航向的能力。在与传统舵相比,相同对船舶的转向力下,顶拖杆式舵的入水作用力面积远小于传统舵面。同时传统舵安装在螺旋桨后部很近位置,对螺旋桨排出流有一定的阻碍作用。作用在传统舵面无用功和阻力较大。而浸入水面作用力的顶拖杆面和受力端远离螺旋桨排出流较远,所受阻力及为转向力。且篙式设备离船舶中心纵向线横距越远,转向力越大,越明显。当航向稳定无需调整时可将设备抬离水面。在需要调整航向时再将设备放入水中。此设备方案中,顶拖杆机构和受力端头机构不受船舶速度、舵角的上限和下限受制。传统舵叶安装在船舶中心线上,舵面产生的阻力即为阻碍航速的阻力;顶拖杆杆式舵面在调整至所要角度时,通过顶拖杆在船舶纵向线平行线上左或右摆动,所产生的流压差和阻力,都可以成为船舶转向力,受力面与水流的相对速度和顶拖杆的承受力有关。在船舶首、中、尾左右各位置都可安装该系统,作为船舶独立的船舶转向和保向系统存在,也可成为船舶原有的内部舵机以外的辅助船舶转向、保向设备。在不影响原有舵机功效的情况下,大幅度提高船舶转向、保向能力。在发生舵叶丢失、损坏、舵机故障时,进行改变航向和保持航向、降低船速的操作,此系统为独立于船舶传统舵面控制设计。
该设备还有避免或减轻碰撞事故的功能,船舶发生航向失控、主机停车、舵机失灵等情况进而引发碰撞时,因自身丧失改变航向、航速的能力,现行操作为呼叫拖轮帮助减速和控制航向一个操作方式,这就不可避免不能保持所有船舶周围随时都有拖轮,且拖轮到达和进行帮助时间无法保证及时。不确定性较大。而使用顶拖杆机构及其控制系统可在失控船舶早期利用篙式设备的舵效原理,控制改变航向和降速,在无法避免发生碰撞码头或船舶时,将顶拖杆伸至最大作业范围后与被撞击船舶、码头、桥桩提前接触,而后均匀产生最大推力,将船只推停,或将其推离被撞击船舶、码头、桥桩,进而避免或大幅度减轻其碰撞、搁浅承度,其作用为给船舶、码头、桥桩安装一个船舶刹车和推离的防撞击系统。
该设备还具有船舶推进的作用,其原理为利用水或外部物体的反作用力,对船舶产生反作用力。进而推动船舶。具体操作:
1.船舶在岸边或水深底部在顶拖杆机构的作业范围内,利用顶拖杆推在固定物体的反作用力,推进前船体运动。
2.水的反作用力:a)使用受力端头和顶拖杆一部分入水的长度,划动顶拖杆,类似于船桨划船动作;b)主要利用受力端头机构底部面积与水发生作用,使用顶拖杆长度推动受力端头和水产生作用力与反作用力,进去驱动船舶。此推进方式可产生船舶驱动力,也可控制驱动方向。
该设备具有固定船身的作用,使用顶拖杆机构在搁浅或触礁不可避免的情况下,将顶拖杆最大程度伸出,并斜向船舶前往方向。放入水中,使受力端与水底部接触,而后均匀产生最大推力,将船只最大限度的降速或停止。同时也起到固定船身,避免船体受风、水流影响,发生船体偏转打横,进而扩大损害,使用船舶上的顶拖杆机构调整出杆方向和角度,放入水下受力固定后,可起到固定船身的作用和测深作用。
该设备具有船舶安保的作用,在船舶四周安装若干台篙式设备系统,确保船体被篙式设备的长杆所覆盖。一旦遇到危险船舶(如海盗船)企图强行登船。可在海盗船未靠近本船时,伸出长杆能起到一定的震慑海盗的作用。在海盗船到达长杆的作业范围后,使用长杆将其推离本船,使其无法靠上。进而无法登船劫持船员与船舶。也可在长杆受力端部安装消防水枪和管道。使用消防水远距离冲击海盗船,以上方式结合使用,可以在不违反相关法律和公约的情况下,合理的增加船舶自卫反击海盗的手段。减少或避免被海盗劫持的风险。
该设备具有改进现行大型船舶航行横向间物资补给作业方式的作用。现行大型船舶横向航行补给作业为使用一根钢丝绳连接。管道安装在钢丝绳上进行输送作业。在两船高超的操船控制下,和在甲班工作人员配合协助下完成。且对风力、风向、浪高、航向、航速、间距等都有严格要求,一旦超出要求则无法进行安全作业。在一船安装使用2台(首尾各一台)及以上(或再增加1台船舶中部)篙式设备。利用长杆顶推、拉拽作用,使两船之间构成稳定的横向距离。船舶操纵人员只需负责控制两船速度相对静止即可。降低船舶操纵人员和甲班工作人员的劳动强度和操作要求。提高抗击风力、风向、风浪等级,和对两船的航向和航速没有任何限制的优点。并可减少缩短现行所要求的两船横距,提高作业效率,增加补给物品种类。在完成作业后,利用长杆推顶,可快速分开船舶,完成两船脱离。
该设备还具有船舶救援作用,在用于船舶对船舶救援行动时,如遇险船有特殊情况不可被救援船靠泊进行施救,如大风、大浪、水深等因素,救援船无法靠近时,此时如救援船装配顶拖杆机构至被救援船舶,在顶拖杆的固定连接下,可进行拖带施救,或进行人员、物资输送转移。如建立多条顶拖杆通道,可起到相对固定船体,加速人员与物资的转运。在长杆端部安装消防水枪及其管道,可增加消防灭火作业范围。或如遇险船舶失火,人员都已离开,而失火船漂航将至重要区域(军事区域、桥梁、危化品码头等),抢险施救船可将长杆伸至最大作业距离,最大限度的避免热辐射对施救船的伤害。将失火船推离、牵引至安全水域。
与现有技术相比,本实用新型可以通过远程或现场遥控操作,进行有人或无人参与完成有人船舶、自动航行船舶关于靠、系、离、移泊及船舶定位作业操作和解决方案,取代或部分取代港拖船舶功能和作用;通过把顶拖杆设为硬式长顶拖杆,可以利用其长杆的长度,使用长杆上的齿轮调整作业所需长度完成伸缩作业,结构简单,维护简单,制造成本低;通过把顶拖杆设为伸缩式顶拖杆,可以确保伸缩式顶拖杆能够保证可以伸至工作所需要的长度、速度、力度,从而使其完成顶拖停动作;通过把顶拖杆设为组合式顶拖杆,可以最大节约设备占用和作业空间,不使用的长度将其卷收进顶拖缆绞盘中,柔韧性大,作业范围远。
附图说明
图1为本实用新型的一种结构示意图;
图2为受力端头机构的一种结构示意图;
图3为硬式长顶拖杆的一种结构示意图;
图4为本实用新型的另一种结构示意图;
图5为伸缩式顶拖杆的一种结构示意图;
图6为本实用新型的另一种结构示意图;
图7为组合式顶拖杆的一种结构示意图;
图8为顶拖块的一种结构示意图;
图9为合并器的一种结构示意图;
图10为顶拖块固定装置的一种结构示意图;
图11为顶拖块固定装置的另一种结构示意图;
图12为组合式顶拖杆的另一种结构示意图;
图13为组合块的一种结构示意图;
图14为组合器的一种结构示意图。
具体实施方式
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
实施例1,参考图1-3,本实用新型提供以下技术方案:一种水上篙式设备系统,包括控制系统和工作系统,所述工作系统包括基座,在基座上装有顶拖杆机构14,在顶拖杆机构的前端装有受力端头机构;
所述基座设有座体11,在座体上安装有转盘,在转盘上安装有顶拖杆支撑座12,所述顶拖杆支撑座的中心通过支撑万向节与转盘相连,所述顶拖杆支撑座的正面设置为支撑面,在支撑面的同一中心轴线上设有至少两个支撑顶拖杆机构的液压顶升装置13,液压顶升装置驱动支撑顶拖杆机构上下摆动,在液压顶升装置的顶部设有滑套2,在顶拖杆支撑座的背面沿其周向方向设有若干个支撑座角度调节机构,所述支撑座角度调节机构包括若干支撑座液压顶升气缸,支撑座液压顶升气缸的一端固定安装在转盘上,支撑座液压顶升气缸活塞杆的端部固定安装在顶拖杆支撑座的背面;
所述顶拖杆机构设有硬式长顶拖杆,硬式长顶拖杆设有硬杆体15,硬杆体的横剖面可为圆形、椭圆形、正方形、长方形、三角形、梯形、工字型等各种形状;硬杆体装在滑套2上,在硬杆体至少一侧的下部设有沿其长度方向设置与滑套相配合的滑轨5,在硬杆体15上装有驱动硬杆体沿着滑套2前后水平移动的驱动组件,所述驱动组件包括设在硬杆体至少一侧的上部并沿其长度方向设置的齿条3,所述齿条沿其长度方向竖向并排设在硬杆体至少一侧的上部,所述滑轨5设在齿条下方的硬杆体上,在硬杆体的至少一侧设有与齿条啮合的齿轮1,每个齿轮均与装在转盘上的驱动电机相连,驱动顶拖杆调整至工作的长度、速度和所需要的顶拉力,驱动电机的动力来源可为燃油机、电动机、液压驱动等,由工作所的场所环境和要求进行调整;
所述受力端头设有端头架6,所述端头架通过万向节9与硬式长顶拖杆端部相连,所述端头架6的正面设置为顶拖面,所述顶拖面上设有软垫或者若干个吸盘8,在顶拖面的中心处设有辅助件孔,在端头架上装有顶拖辅助件7,顶拖辅助件通过伸缩气缸驱动伸出辅助件孔或者缩回到端头架6内,所述顶拖辅助件7为拉钩或者拉环,所述吸盘8设有四个,均匀设在顶拖面的辅助件孔四周,每个吸盘的高度相同;也可以在端头架6内部安装电磁线圈通电产生磁吸力,或这在顶拖面的底部抽吸至真空,利用大气压产生吸力,以满足作业所需要的摩擦力、顶推力、拉拽力。在端头架6的背面沿其周向方向设有若干个端头角度调节机构,所述端头角度调节机构包括若干液压顶升气缸10,液压顶升气缸的一端固定安装在硬式长顶拖杆上,液压顶升气缸活塞杆的端部固定安装在端头架的背面。
所述控制系统包括主控制器和传感系统,传感系统与主控制器相连,主控制器收集和处理传感系统的数据,接收和执行控制人员命令,进而对电源系统进行控制,通过支撑座角度调节机构对顶拖杆支撑座12进行左右调整,通过液压顶升装置13对顶拖杆机构14进行上下仰俯角度调整。对转盘进行左右水平角度转动调整和对顶拖杆伸出长度和速度调整和控制,使其达到工作所需要求;所述传感系统包括安装在受力端头上用于测量被测船舶或码头与自身相对船速、船向、横摇、纵摇、横荡、纵荡数据的采集系统,所述采集系统包括运动姿态传感器、加速度传感器、方位传感器、压力传感器和温度传感器;传感系统还包括安装在转盘中用于测量转盘旋转角度的角度传感器和安装在基座上用于监控外部环境信息的监控系统,所述监控系统包括超声波雷达、毫米波雷达、激光雷达和全景摄像头,在硬杆体15内设有传感系统导线安装孔。
工作时,基座固定在码头或者船体上,由传感系统采集船舶自身数据船速、船向、横摇、纵摇、横荡、纵荡、垂荡等数据,再传输给主控制器,主控制器接收和执行控制人员命令,通过转盘和液压顶升装置13调整顶拖杆所需要的上下、左右仰俯、左右水平角度,控制此设备至所需作业位置,然后通过驱动电机使齿轮1驱动齿条3运动,从而驱动顶拖杆调整至工作的长度、速度和所需要的顶拉力,接着受力端头直接用吸盘8吸住被作用物上进行顶撑操作,当需要拉拽操作时,可以将顶拖辅助件7伸出与船体或者码头上的固定物相连,进行拉拽操作。硬式长顶拖杆具有结构简单,维护方便,制造成本低等优点。
实施例2,参考图4-5,与实施例1相比,其区别是所述顶拖杆为伸缩式顶拖杆,所述伸缩式顶拖杆包括主杆16和多个套装在主杆中的单缸插销式伸缩杆17,端头架6通过万向节9与第一节单缸插销式伸缩杆端部相连,最后一节单缸插销式伸缩杆与主杆16相连,所述齿条3沿其长度方向竖向并排设在主杆的至少一侧上,所述滑轨5设在齿条下方的主杆16上;工作时,伸缩式顶拖杆在伸出时可先将主杆16利用齿轮1伸出最长,如工作需要可再伸出最前部的单缸插销式伸缩杆17,然后伸出次一节,在次一节伸至极限后再伸出次一节,以此类推。相对于硬式长顶拖杆,伸缩式顶拖杆能够保证可以伸至工作所需要的长度、速度、力度,从而使其完成顶、拖、停动作。
实施例3,参考图6-10,与实施例1和2相比,其区别是所述顶拖杆为组合式顶拖杆,所述组合式顶拖杆包括基础杆19,在基础杆的末端连接有组合杆18,组合杆由两条相互啮合的单串顶拖缆构成,在基础杆19和组合杆18相接处设有啮合或者分离两个单串顶拖缆的合并器24,所述两条单串顶拖缆的另一端分别连接在顶拖缆绞盘上,两个单串顶拖缆通过合并器24啮合构成组合杆,组合杆18与基础杆19连接构成组合式顶拖杆。
所述单串顶拖缆包括若干个顶拖块22,所述顶拖块的内部设有顶拖块固定装置活动室,在顶拖块固定装置活动室内安装有顶拖块固定装置,所述顶拖块固定装置包括由四根支撑辊相互铰接构成的四边形撑合装置28,所述四边形撑合装置上构成了四个铰接点,其中一个铰接点设为固定铰接点,固定铰接点固定在顶拖块固定装置活动室的内壁上,与固定铰接点相对的铰接点铰接有推杆29,推杆的尾端伸出至主啮合凹槽32中,在推杆的下部套设有复位弹簧30,复位弹簧的一端固定在主啮合凹槽32的底部,另一端固定在推杆29上;所述四边形撑合装置28上的另外两个铰接点均铰接有钩杆33,所述钩杆通过顶拖块固定装置通孔伸进到相邻顶拖块的顶拖块固定槽31内,使相邻的两个顶拖块22相固定。
相邻两个顶拖块22之间连接有带筋20,所述带筋设在顶拖块的上表面上,所述顶拖块22的两侧面设置为与另一条单串顶拖缆上的顶拖块相互啮合的啮合部,一侧的啮合部的中心处设有向外凸出的主啮合凸块23,在主啮合凸块的两侧均开有与顶拖块固定装置相配合的顶拖块固定装置通孔,在主啮合凸块两侧的啮合部上设有向顶拖块内凹陷的辅助啮合凹槽,同一顶拖块的另一侧的啮合部上设有与主啮合凸块和辅助啮合凹槽相对应的主啮合凹槽32和辅助啮合凸块21,在主啮合凹槽32的两侧均开有与顶拖块固定装置相配合的顶拖块固定槽31。在每个顶拖块的正面沿其中心轴线设有导线安装槽,在导线安装槽的一侧设有带筋弧形导槽,导槽的开口方向与两个顶拖块啮合方向相同;所述齿条3沿基础杆19长度方向竖向并排设在基础杆至少一侧的上部,所述滑轨5设在齿条下方的基础杆19上,在每个顶拖块的两端面上设有竖齿,两条相互啮合的单串顶拖缆上的竖齿与前述齿条平行并构成一条连续的齿条,在两条单串顶拖缆的两侧下部均设有沿其长度方向设置与滑套2相配合的顶拖缆滑轨。
所述合并器包括上、下合板和连接在上、下合板之间的三角锥形连接件26,所述上、下合板靠近顶拖缆绞盘的一端构成组合式顶拖杆分离口,所述三角锥形连接件设在组合式顶拖杆分离口处,将分离口分成两个单串顶拖缆入口25,所述上、下合板靠近基础杆的一端构成组合式顶拖杆啮合口27,所述组合式顶拖杆啮合口的宽度小于组合式顶拖杆分离口的宽度,所述组合式顶拖杆啮合口的宽度等于组合式顶拖杆的宽度。
工作时,驱动电机驱动基础杆19上的齿条3使其向前运动,如果设备距离目标较近,只使用基础杆19就可以完成作业;如果设备距离目标较远,就可以通过两个绞盘分别将单串顶拖缆送出至需要的长度,再通过合并器24将两条单串顶拖缆组合成组合式顶拖杆,组合式顶拖杆在成型时,通过顶拖块22内的顶拖块固定装置使两个顶拖块更加固定,可以更好的起到支持组合式顶拖杆抗弯曲力和拉拽力,减少对带筋20的拉拽力;不使用时将其通过合并器24分离并卷收进绞盘中,节约设备占用和作业空间。相对上面两种顶拖杆,组合式顶拖杆具有占用空间最小,柔韧性大,作业范围远等优点。
实施例4,参考图6-11,与实施例1、实施例2和实施例3相比,其区别是所述顶拖块固定装置包括设在顶拖块中心轴线上的推拉杆35,推拉杆的尾端伸出至主啮合凹槽32中,所述推拉杆的头端通过两个连杆37分别铰接有两个固定钩块34,所述固定钩块的上端铰接在顶拖块固定装置活动室的内壁上,所述固定钩块34可以通过顶拖块固定装置通孔伸进到相邻顶拖块的顶拖块固定槽31内,使两个相邻的顶拖块22相固定;固定钩块的34上端铰接处设有限位块,在靠近限位块的顶拖块固定装置活动室内壁上设有与限位块相配合的挡块,所述推拉杆的下部外套有推拉复位弹簧36,推拉复位弹簧的一端固定在主啮合凹槽32的底部,另一端固定在推拉杆35上。
当顶拖块22啮合时,通过后一个顶拖块22的将推拉杆35顶进顶拖块固定装置活动室中,推拉杆35在运动过程中推动固定钩块34,使其沿着铰接点转动,通过顶拖块固定装置通孔伸进到相邻顶拖块的顶拖块固定槽31内,从而锁死两个顶拖块22,使顶拖杆的强度加强。
实施例5,参考图12-14,与实施例1和2和3和4相比,
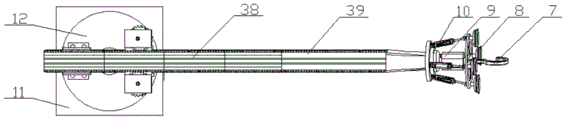
所述顶拖杆为组合式顶拖杆,所述组合式顶拖杆包括基础顶杆39,在基础顶杆的末端连接有若干组合块38,基础顶杆39与组合块38、组合块与组合块之间均连接有连接筋,连接筋通过铆钉铆接在组合块的表面上,固定连接点距组合块的边沿为2-10cm,所述连接筋设在组合块38的上表面上,所述组合块的前后两侧面设为与相邻组合块相互啮合的组合部,所述组合块的前侧面设有向外凸出的凸块,所述凸块上设有向上倾斜的斜钩40,组合块的后侧面设有与相邻组合块的斜凸块相配合的凹槽,所述基础顶杆39的末端设有与相邻组合块38的斜凸块相配合的基础凹槽,在基础顶杆39和组合块相接处设有啮合或者分离所有组合块的组合器,所述组合式顶拖杆的另一端分别连接在组合式顶拖杆绞盘上,组合块38通过组合器啮合与基础顶杆39连接构成组合式顶拖杆;
所述齿条3沿基础顶杆39长度方向竖向并排设在基础顶杆39的一侧上部,所述滑轨5设在齿条3下方的基础顶杆39上,在每个组合块38的两端面上设有竖齿,所述竖齿与前述齿条构成一条连续的组合齿条,在竖齿的下部设有沿组合式顶拖杆长度方向设置与滑套相配合的组合滑轨,在每个组合块的正面沿其中心轴线设有导线放置槽。
所述组合器包括相互连接的啮合进部41与啮合出部43,啮合进部与啮合出部之间的夹角为95°-175°,啮合进部设在靠近组合式顶拖杆绞盘的一侧,啮合出部设在靠近基础顶杆的一侧,啮合进部上设有啮合进口42,啮合出部上设有啮合出口44。
工作时,驱动电机驱动基础顶杆39上的齿条3使其向前运动,如果设备距离目标较近,只使用基础顶杆39就可以完成作业;如果设备距离目标较远,就可以通过组合式顶拖杆绞盘将若干组合块38送出至需要的长度,再通过组合器将若干组合块组合成组合式顶拖杆;不使用时将其通过组合器分离并卷收进组合式顶拖杆绞盘中,节约设备占用和作业空间。相对上面几种顶拖杆,组合式顶拖杆占用空间更小,柔韧性大,作业范围远、结构更加简单等优点。
尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
Claims (11)
1.一种水上篙式设备系统,其特征在于:
包括控制系统和工作系统,所述工作系统包括基座,在基座上装有顶拖杆机构(14),在顶拖杆机构的前端装有受力端头机构;
所述基座设有座体(11),在座体上安装有转盘,在转盘上安装有顶拖杆支撑座(12),所述顶拖杆支撑座的中心通过支撑万向节与转盘相连,所述顶拖杆支撑座的正面设置为支撑面,在支撑面的同一中心轴线上设有至少两个支撑顶拖杆机构的液压顶升装置(13),液压顶升装置驱动支撑顶拖杆机构上下摆动,在液压顶升装置的顶部设有滑套(2),在顶拖杆支撑座的背面沿其周向方向设有若干个支撑座角度调节机构,所述支撑座角度调节机构包括若干支撑座液压顶升气缸,支撑座液压顶升气缸的一端固定安装在转盘上,支撑座液压顶升气缸活塞杆的端部固定安装在顶拖杆支撑座的背面;
所述顶拖杆机构设有顶拖杆(4),顶拖杆装在滑套上,在顶拖杆上装有驱动顶拖杆沿着滑套前后水平移动的驱动组件;
所述受力端头设有端头架(6),所述端头架通过万向节(9)与顶拖杆端部相连,所述端头架的正面设置为顶拖面,在端头架的背面沿其周向方向设有若干个端头角度调节机构;
所述控制系统包括主控制器和传感系统,传感系统与主控制器相连,所述传感系统包括安装在受力端头上用于测量与被接触物的相对运动速度、运动方向和船舶产生的横摇、纵摇、横荡、纵荡、垂荡数据的采集系统,以及安装在转盘中用于测量转盘旋转角度的角度传感器和安装在基座上用于监控外部环境信息的监控系统。
2.根据权利要求1所述的一种水上篙式设备系统,其特征在于:所述顶拖杆的侧下部设有沿其长度方向设置、与滑套相配合的滑轨(5),所述驱动组件包括设在顶拖杆的侧上部并沿其长度方向设置的齿条(3),在顶拖杆外侧设有若干个与齿条啮合的齿轮(1),每个齿轮均与装在转盘上的驱动电机相连。
3.根据权利要求1所述的一种水上篙式设备系统,其特征在于:所述顶拖面上设有软垫或者若干个吸盘(8),在顶拖面的中心处设有辅助件孔,在端头架上装有顶拖辅助件(7),顶拖辅助件通过伸缩气缸驱动伸出辅助件孔或者缩回到端头架内;所述顶拖辅助件为拉钩或者拉环,所述吸盘设有若干个,均匀设在顶拖面的辅助件孔四周,每个吸盘的高度相同;所述端头角度调节机构包括若干液压顶升气缸(10),液压顶升气缸的一端固定安装在顶拖杆上,液压顶升气缸活塞杆的端部固定安装在端头架的背面。
4.根据权利要求1所述的一种水上篙式设备系统,其特征在于:所述采集系统包括运动姿态传感器、加速度传感器、方位传感器、压力传感器和温度传感器;所述监控系统包括超声波雷达、毫米波雷达、激光雷达和全景摄像头。
5.根据权利要求2所述的一种水上篙式设备系统,其特征在于:所述顶拖杆为硬式长顶拖杆,硬式长顶拖杆设有硬杆体(15),所述齿条沿其长度方向竖向并排设在硬杆体至少一侧的上部,所述滑轨设在齿条下方的硬杆体上,在硬杆体上设有传感系统导线安装孔。
6.根据权利要求2所述的一种水上篙式设备系统,其特征在于:所述顶拖杆为伸缩式顶拖杆,所述伸缩式顶拖杆包括主杆(16)和多个套装在主杆中的单缸插销式伸缩杆(17),端头架通过万向节与第一节单缸插销式伸缩杆端部相连,最后一节单缸插销式伸缩杆与主杆相连,所述齿条沿其长度方向竖向并排设在主杆至少一侧的上部,所述滑轨设在齿条下方的主杆上。
7.根据权利要求2所述的一种水上篙式设备系统,其特征在于:所述顶拖杆为组合式顶拖杆,所述组合式顶拖杆包括基础杆(19),在基础杆的末端连接有组合杆(18),组合杆由两条相互啮合的单串顶拖缆构成,在基础杆和组合杆相接处设有啮合或者分离两个单串顶拖缆的合并器(24),所述两条单串顶拖缆的另一端分别连接在顶拖缆绞盘上,两个单串顶拖缆通过合并器啮合构成组合杆,组合杆与基础杆连接构成组合式顶拖杆;
所述单串顶拖缆包括若干个顶拖块(22),所述顶拖块的内部设有顶拖块固定装置活动室,在顶拖块固定装置活动室内安装有顶拖块固定装置,相邻两个顶拖块之间连接有带筋(20),所述带筋设在顶拖块的上表面上,所述顶拖块的两侧面设置为与另一条单串顶拖缆上的顶拖块相互啮合的啮合部,一侧的啮合部的中心处设有向外凸出的主啮合凸块(23),在主啮合凸块的两侧均开有与顶拖块固定装置相配合的顶拖块固定装置通孔,在主啮合凸块两侧的啮合部上设有向顶拖块内凹陷的辅助啮合凹槽,同一顶拖块的另一侧的啮合部上设有与主啮合凸块和辅助啮合凹槽相对应的主啮合凹槽(32)和辅助啮合凸块(21),在主啮合凹槽的两侧均开有与顶拖块固定装置相配合的顶拖块固定槽(31);在每个顶拖块的正面沿其中心轴线设有导线安装槽,在导线安装槽的一侧设有带筋弧形导槽,导槽的开口方向与两个顶拖块啮合方向相同;所述齿条沿基础杆长度方向竖向并排设在基础杆至少一侧的上部,所述滑轨设在齿条下方的基础杆上,在每个顶拖块的两端面上设有竖齿,两条相互啮合的单串顶拖缆上的竖齿与前述齿条平行并构成一条连续的齿条,在两条单串顶拖缆的两侧下部均设有沿其长度方向设置与滑套相配合的顶拖缆滑轨。
8.根据权利要求7所述的一种水上篙式设备系统,其特征在于:所述合并器包括上、下合板和连接在上、下合板之间的三角锥形连接件(26),所述上、下合板靠近顶拖缆绞盘的一端构成组合式顶拖杆分离口,所述三角锥形连接件设在组合式顶拖杆分离口处,将分离口分成两个单串顶拖缆入口(25),所述上、下合板靠近基础杆的一端构成组合式顶拖杆啮合口(27),所述组合式顶拖杆啮合口的宽度小于组合式顶拖杆分离口的宽度,所述组合式顶拖杆啮合口的宽度等于组合式顶拖杆的宽度。
9.根据权利要求7所述的一种水上篙式设备系统,其特征在于:所述顶拖块固定装置包括由四根支撑辊相互铰接构成的四边形撑合装置(28),所述四边形撑合装置上构成了四个铰接点,其中一个铰接点设为固定铰接点,固定铰接点固定在顶拖块固定装置活动室的内壁上,与固定铰接点相对的铰接点铰接有推杆(29),推杆的尾端伸出至主啮合凹槽中,在推杆的下部套设有复位弹簧(30),复位弹簧的一端固定在主啮合凹槽的底部,另一端固定在推杆上;所述四边形撑合装置上的另外两个铰接点均铰接有钩杆(33),所述钩杆通过顶拖块固定装置通孔伸进到相邻顶拖块的顶拖块固定槽内,使相邻的两个顶拖块相固定。
10.根据权利要求7所述的一种水上篙式设备系统,其特征在于:所述顶拖块固定装置包括设在顶拖块中心轴线上的推拉杆(35),推拉杆的尾端伸出至主啮合凹槽中,所述推拉杆的头端通过两个连杆(37)分别铰接有两个固定钩块(34),所述固定钩块的上端铰接在顶拖块固定装置活动室的内壁上,所述固定钩块可以通过顶拖块固定装置通孔伸进到相邻顶拖块的顶拖块固定槽内,使两个相邻的顶拖块相固定;固定钩块的上端铰接处设有限位块,在靠近限位块的顶拖块固定装置活动室内壁上设有与限位块相配合的挡块,所述推拉杆的下部外套有推拉复位弹簧(36),推拉复位弹簧的一端固定在主啮合凹槽的底部,另一端固定在推拉杆上。
11.根据权利要求2所述的一种水上篙式设备系统,其特征在于:所述顶拖杆为组合式顶拖杆,所述组合式顶拖杆包括基础顶杆(39),在基础顶杆的末端连接有若干组合块(38),基础顶杆与组合块、组合块与组合块之间均连接有连接筋,所述连接筋设在组合块的上表面上,所述组合块的前后两侧面设为与相邻组合块相互啮合的组合部,所述组合块的前侧面设有向外凸出的凸块,所述凸块上设有向上倾斜的斜钩(40),组合块的后侧面设有与相邻组合块的斜凸块相配合的凹槽,所述基础顶杆的末端设有与相邻组合块的斜凸块相配合的基础凹槽,在基础顶杆和组合杆相接处设有啮合或者分离所有组合块的组合器,所述组合式顶拖杆的另一端分别连接在组合式顶拖杆绞盘上,组合块通过组合器啮合与基础顶杆连接构成组合式顶拖杆;
所述齿条沿基础顶杆长度方向竖向并排设在基础顶杆的一侧上部,所述滑轨设在齿条下方的基础顶杆上,在每个组合块的两端面上设有竖齿,所述竖齿与前述齿条构成一条连续的组合齿条,在竖齿的下部设有沿组合式顶拖杆长度方向设置与滑套相配合的组合滑轨,在每个组合块的正面沿其中心轴线设有导线放置槽;
所述组合器包括相互连接的啮合进部(41)与啮合出部(43),啮合进部与啮合出部之间的夹角为95°-175°,啮合进部设在靠近组合式顶拖杆绞盘的一侧,啮合出部设在靠近基础顶杆的一侧,啮合进部上设有啮合进口(42),啮合出部上设有啮合出口(44)。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202022921527.1U CN214451663U (zh) | 2020-12-08 | 2020-12-08 | 一种水上篙式设备系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202022921527.1U CN214451663U (zh) | 2020-12-08 | 2020-12-08 | 一种水上篙式设备系统 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN214451663U true CN214451663U (zh) | 2021-10-22 |
Family
ID=78187850
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202022921527.1U Withdrawn - After Issue CN214451663U (zh) | 2020-12-08 | 2020-12-08 | 一种水上篙式设备系统 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN214451663U (zh) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112623116A (zh) * | 2020-12-08 | 2021-04-09 | 祁建 | 水上篙式设备系统 |
| CN113911290A (zh) * | 2021-11-12 | 2022-01-11 | 中国科学院海洋研究所 | 用于坐底式海床基观测系统失浮后的打捞装置及方法 |
| CN116691925A (zh) * | 2023-08-07 | 2023-09-05 | 山东航宇船业集团股份有限公司 | 一种游艇停泊固定设备及固定方法 |
-
2020
- 2020-12-08 CN CN202022921527.1U patent/CN214451663U/zh not_active Withdrawn - After Issue
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112623116A (zh) * | 2020-12-08 | 2021-04-09 | 祁建 | 水上篙式设备系统 |
| CN112623116B (zh) * | 2020-12-08 | 2024-07-12 | 祁建 | 水上篙式设备系统 |
| CN113911290A (zh) * | 2021-11-12 | 2022-01-11 | 中国科学院海洋研究所 | 用于坐底式海床基观测系统失浮后的打捞装置及方法 |
| CN113911290B (zh) * | 2021-11-12 | 2023-05-02 | 中国科学院海洋研究所 | 用于坐底式海床基观测系统失浮后的打捞装置及方法 |
| CN116691925A (zh) * | 2023-08-07 | 2023-09-05 | 山东航宇船业集团股份有限公司 | 一种游艇停泊固定设备及固定方法 |
| CN116691925B (zh) * | 2023-08-07 | 2023-11-07 | 山东航宇船业集团股份有限公司 | 一种游艇停泊固定设备及固定方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN214451663U (zh) | 一种水上篙式设备系统 | |
| EP3326899B1 (en) | Wind turbine mooring system | |
| EP3472092B1 (en) | A crane for wind turbine blade assembly, a vessel, a hoisting method, and an assembly method | |
| CN103381877B (zh) | 改进的拖船船体及包括该改进船体的拖船 | |
| CN105857521B (zh) | 一种用于风电施工船的船舶定位系统及方法 | |
| CN111645810B (zh) | 一种带有浮力调节搭载平台的多功能工作船及其作业方法 | |
| CN110877666A (zh) | 自航式水下隧道沉管运载安装一体船及施工工艺 | |
| CN103171742A (zh) | 一种适用于舟车装卸运输的架桥汽艇 | |
| CN116476987B (zh) | 一种海上无人系统自主布放回收系统 | |
| US20030220027A1 (en) | Wave powered cyclic anchoring itinerant ship propulsion system | |
| CN112623116A (zh) | 水上篙式设备系统 | |
| CN104778860B (zh) | 一种船舶集装过闸装置及集装过闸方法 | |
| CN202186494U (zh) | 一种具有可拆卸式定位锚架的潜水支援船 | |
| CN115748640A (zh) | 一种适应长距离、水位大幅波动的待牵引船舶进出升船机船厢牵引系统及方法 | |
| US20140150703A1 (en) | Supply vessel | |
| CN113335544A (zh) | 一种舰载直升机助降装置的传动系统 | |
| CN118810309A (zh) | 一种高速行驶并能快速转换行驶形态的水陆两栖组合式平台 | |
| CN212290227U (zh) | 一种破冰型大型航标船 | |
| CN201280218Y (zh) | 自牵引移动升船和移船的锚碇系统 | |
| CN112319700B (zh) | 一种母船无锚机的抛锚方法 | |
| CN208181366U (zh) | 一种敷缆船行进装置 | |
| CN211405292U (zh) | 一种长距离沙洲段的预铺锚缆系统组成 | |
| CN108438153A (zh) | 一种敷缆船行进装置 | |
| CN121590701B (zh) | 一种智慧港口的智能拖轮及同步控制方法 | |
| CN220813766U (zh) | 一种船舶成组过闸编队连接装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| AV01 | Patent right actively abandoned |
Granted publication date: 20211022 Effective date of abandoning: 20240712 |
|
| AV01 | Patent right actively abandoned |
Granted publication date: 20211022 Effective date of abandoning: 20240712 |
|
| AV01 | Patent right actively abandoned | ||
| AV01 | Patent right actively abandoned |