CN214352437U - Multi-degree-of-freedom hip joint mechanism of lower limb exoskeleton robot - Google Patents
Multi-degree-of-freedom hip joint mechanism of lower limb exoskeleton robot Download PDFInfo
- Publication number
- CN214352437U CN214352437U CN202120079808.9U CN202120079808U CN214352437U CN 214352437 U CN214352437 U CN 214352437U CN 202120079808 U CN202120079808 U CN 202120079808U CN 214352437 U CN214352437 U CN 214352437U
- Authority
- CN
- China
- Prior art keywords
- hip joint
- joint
- shaft
- component
- hip
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


Abstract
The utility model discloses a multi freedom hip joint mechanism of low limbs ectoskeleton robot, include: the first hip joint component is provided with a first joint shaft and a first hip joint driving piece, and the first hip joint driving piece drives the first joint shaft to rotate; the second hip joint component is provided with a second hip joint driving piece, and the output end of the second hip joint driving piece is connected with a second joint shaft; and one end of the second hip joint component is provided with a third hip joint driving piece, and the third hip joint component is connected with the output end of the third hip joint driving piece. Through the reasonable arrangement of each component and the driving part, the three-freedom-degree motion function of the hip joint is realized, the motions of the respective freedom degrees are independent, the interference is avoided, the simultaneous motion under multiple freedom degrees can be realized, the good simulation of the hip joint function of the human body can be realized, and the realization of the function is more humanized.
Description
Technical Field
The utility model relates to the technical field of robots, in particular to multi freedom hip joint mechanism of low limbs ectoskeleton robot.
Background
At present, research on exoskeleton power assisting devices is gradually developed, and the exoskeleton power assisting devices have wide application prospects, such as the fields of old and disabled assisting, medical rehabilitation, industrial production, earthquake rescue, individual combat and the like. A typical power-assisted exoskeleton has the following characteristics: joint freedom and joint rotation space similar to the human body can be detected according to the motion intention of the human body; have the necessary joint active drive to assist in the output; the system is provided with a control system and an energy system; has a certain safety protection mechanism.
The power-assisted exoskeleton can be divided into two situations according to the purpose of power transmission: the exoskeleton drives the human body to move and the human body drives the exoskeleton to move. In the field of old and disabled assisting or medical rehabilitation, the exoskeleton aims to assist the movement of muscles of a human body so as to achieve the aims of assisting the old to lift legs or assisting a patient to do muscle function recovery training and the like. The exoskeleton is required to set motion plans of all joints, or detect myoelectric signals, limb motion directions and the like of a human body to judge the motion intention of the human body and drive a wearer to move.
Due to the complexity of actions during human body movement, the power assisting exoskeleton needs to realize multi-degree-of-freedom actions at each joint part during human body movement simulation, so that the structure of the exoskeleton power assisting device is complex, interference is easy to occur among all action parts, and the normal operation of the device is influenced. Particularly, in the hip joint position, the hip joint is a connecting position of the lower limbs and the trunk of the human body, and the position has the requirement of multiple degrees of freedom and has important influence on the normal completion of the walking action of the human body. In the existing exoskeleton power assisting device, movement on one or two degrees of freedom can be realized at a hip joint part, the structure of the existing exoskeleton power assisting device capable of realizing movement in multiple degrees of freedom is complex, and mutual interference exists between the degrees of freedom during movement, so that the using effect is influenced.
SUMMERY OF THE UTILITY MODEL
An object of the utility model is to solve the motion of ectoskeleton booster unit among the prior art on a plurality of degrees of freedom can not be realized at the hip joint position, or when realizing a plurality of degrees of freedom motions, the structure is complicated and there is the problem of interference between the degree separately when the motion, provides a low limbs ectoskeleton robot multi freedom hip joint mechanism, when can realizing the motion of a plurality of degrees of freedom in hip joint position, simple structure to can not take place to interfere in the motion process.
In order to solve the technical problem, the utility model discloses a technical scheme as follows:
a multi-degree-of-freedom hip joint mechanism of a lower limb exoskeleton robot comprises:
the first hip joint component is provided with a first joint shaft and a first hip joint driving part, the first joint shaft is arranged along the axial direction of the first hip joint component and is rotationally connected with the first hip joint component, and the first hip joint driving part drives the first joint shaft to rotate;
the second hip joint component is provided with a second hip joint driving piece, the output end of the second hip joint driving piece is connected with a second joint shaft, the second joint shaft is connected to the end part of the first joint shaft, the second joint shaft is arranged along the axial direction of the second hip joint component, and the second joint shaft and the first joint shaft are arranged perpendicularly to each other;
a third hip joint component, wherein one end of the second hip joint component is provided with a third hip joint driving piece, and the third hip joint component is connected with the output end of the third hip joint driving piece;
the axis of the output end of the third hip joint driving piece is vertical to the axes of the first joint shaft and the second joint shaft.
In the above technical solution, further, the first hip joint component is arranged horizontally, the first hip joint driving member is arranged below the first hip joint component, and the first hip joint driving member is in transmission connection with the first joint shaft through a belt or a gear.
In the above technical solution, further, the first hip joint driving member includes a first motor and a first elastic coupling, the first elastic coupling is connected to an output end of the first motor, and an output end of the first elastic coupling is in transmission connection with the first joint shaft.
In the above technical solution, further, the second hip joint member is a frame plate structure, the second hip joint driver is disposed in the second hip joint member, and the second joint shaft extends from one end of the second hip joint member and is connected to the first joint shaft.
In the above technical solution, further, the second hip joint driving member includes a second motor and a second elastic coupling, the second motor is fixedly disposed on the mounting seat in the second hip joint member, the second elastic coupling is connected to an output end of the second motor, and the second joint shaft is connected to an output end of the second elastic coupling.
In the above technical solution, further, the third hip joint driving member includes a third motor and a third elastic coupling, the third motor is fixedly disposed on the second hip joint member, the third elastic coupling is connected to an output end of the third motor, and one end of the third hip joint member is connected to an output end of the third elastic coupling.
In the above technical solution, further, the first joint axis is arranged along a sagittal axis of a human body, the second joint axis is arranged along a vertical axis of the human body, and an output axis of the third hip joint driving member is arranged along a coronal axis of the human body.
The utility model discloses the beneficial effect who has:
1) the hip joint mechanism realizes the three-freedom-degree motion function of the hip joint through the reasonable arrangement of each component and the driving piece, the motions of the respective freedom degrees are independent, the interference can not occur, the simultaneous motions under a plurality of freedom degrees can be realized, the hip joint function of a human body can be well simulated, and the realization of the function is more humanized.
2) The hip joint mechanism is simple in structure, installation and arrangement of driving pieces on components are facilitated, the overall structure of the hip joint mechanism is simplified, manufacturing cost and machining difficulty can be effectively reduced, and meanwhile the running stability of the mechanism can be guaranteed.
Drawings
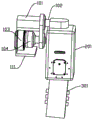
Fig. 1 is a perspective view of the embodiment of the present invention.
Fig. 2 is a schematic diagram of the rear side of the structure of the embodiment of the present invention.
Fig. 3 is a schematic view of an exploded structure according to an embodiment of the present invention.
In the figure: 101. a first hip joint member 111, a mounting bracket 102, a first joint shaft 103, a first motor 104, a first elastic coupling;
201. a second hip joint member 211, a mount 202, a second joint shaft 203, a second motor 204, a second elastic coupling;
301. a third hip joint member, 302, a third motor, 303, a third resilient coupling.
Detailed Description
The invention will be further described with reference to the accompanying drawings and specific embodiments.
In the terms of the orientation noun used in the description of the structure of the embodiment of the present invention, according to the definition in "anthropometric terms", the "coronal plane" is a plane passing through the vertical axis and the horizontal axis and all planes parallel thereto, and these planes divide the human body into the front and rear parts; the sagittal plane is a section dividing the human body into two parts, namely a left part and a right part, and a left plane and a right plane which are parallel to the section. The "coronal axis" is an axis lying in the coronal plane parallel to the horizontal plane; the "sagittal axis" is an axis parallel to the horizontal plane in the sagittal plane, and the "vertical axis" is an axis perpendicular to the horizontal plane.
As shown in fig. 1 to 3, the lower extremity exoskeleton robot multiple degree of freedom hip joint mechanism in the present embodiment includes:
a first hip joint component 101, wherein a first joint shaft 102 and a first hip joint driving component are arranged on the first hip joint component 101, the first joint shaft 102 is arranged along the axial direction of the first hip joint component 101 and is in rotary connection with the first hip joint component 101 through a bearing, and the first hip joint driving component drives the first joint shaft 102 to rotate; here the first joint axis 102 is disposed along the sagittal axis of the human body.
A second hip joint member 201, a second hip joint driver is arranged on the second hip joint member 201, the output end of the second hip joint driver is connected with a second joint shaft 202, the second joint shaft 202 is connected with the end of the first joint shaft 102, the second joint shaft 102 is arranged along the second hip joint member 201 axially, and the second joint shaft 202 and the first joint shaft 201 are arranged perpendicularly to each other; here, the second joint axis 202 is disposed along the vertical axis of the human body.
A third hip joint component 301, one end of the second hip joint component 201 is provided with a third hip joint driver, and the third hip joint component 301 is connected with the output end of the third hip joint driver; the output end axis of the third hip joint driving piece is arranged along the direction of the human body coronal axis,
the output end axis of the third hip joint driver is perpendicular to the axes of the first joint shaft 102 and the second joint shaft 202.
In this embodiment, the first hip joint member 101 is horizontally disposed, the first hip joint driver is disposed below the first hip joint member, and the first hip joint driver and the first joint shaft 102 are connected by a belt or a gear transmission. The first hip joint driving member comprises a first motor 103 and a first elastic coupling 104, the first motor 103 is arranged on a mounting bracket 111, the mounting bracket 111 is fixedly connected to one end of the first hip joint member 101, the first elastic coupling 104 is connected with the output end of the first motor 103, and the output end of the first elastic coupling 104 is in transmission connection with the first joint shaft 102.
The second hip joint member 201 is a hollow frame structure and the second hip joint driver is arranged in the second hip joint member 201 and the second joint shaft 202 extends from one end of the second hip joint member and is connected to the first joint shaft 102. The second hip joint driver comprises a second motor 203 and a second elastic coupling 204, the second motor 203 is fixedly arranged on a mounting seat 211 in the second hip joint member, the second elastic coupling 204 is connected with the output end of the second motor 203, and the second joint shaft 202 is connected with the output end of the second elastic coupling 204.
The third hip joint driving member comprises a third motor 302 and a third elastic coupling 303, the third motor 302 is fixedly arranged on the second hip joint member 201, the third elastic coupling 303 is connected to the output end of the third motor 302, and one end of the third hip joint member 301 is connected to the output end of the third elastic coupling 303.
Through set up elastic coupling respectively in each driving piece, provide the buffering for motor drive's output to reduce the impact that the action in-process motor opens and stops to the human body and cause, improve the travelling comfort. The elastic coupling is a transmission component which is conventionally adopted in the exoskeletal robot at present, the action principle of the elastic coupling is to provide buffer for transmission between shafts by arranging a spring, and the structure of the elastic coupling is not particularly limited.
In the embodiment, the second hip joint component is connected to the first joint shaft through the second joint shaft, and can be driven to rotate in the coronal plane of the human body when the first joint shaft rotates; the second hip joint driving piece drives the second hip joint component to rotate along the axis of the second joint shaft, so that the two-degree-of-freedom rotary motion of the second hip joint component on the coronal plane and the horizontal plane of the human body is realized; meanwhile, the third hip joint component can be driven to swing back and forth relative to the second hip joint component through the third hip joint driving component, so that the third hip joint component can rotate in the space along the directions of a coronal axis, a sagittal axis and a vertical axis, and the function of the movement of the hip joint mechanism on three degrees of freedom is realized.
The present invention is not limited to the above description and drawings, but should be understood as being illustrative and not restrictive, and the technical features can be replaced and modified without creative efforts by those skilled in the art according to the technical content disclosed, all falling within the scope of the present invention.
Claims (7)
1. A multi-degree-of-freedom hip joint mechanism of a lower limb exoskeleton robot is characterized by comprising:
the first hip joint component is provided with a first joint shaft and a first hip joint driving part, the first joint shaft is arranged along the axial direction of the first hip joint component and is rotationally connected with the first hip joint component, and the first hip joint driving part drives the first joint shaft to rotate;
the second hip joint component is provided with a second hip joint driving piece, the output end of the second hip joint driving piece is connected with a second joint shaft, the second joint shaft is connected to the end part of the first joint shaft, the second joint shaft is arranged along the axial direction of the second hip joint component, and the second joint shaft and the first joint shaft are arranged perpendicularly to each other;
a third hip joint component, wherein one end of the second hip joint component is provided with a third hip joint driving piece, and the third hip joint component is connected with the output end of the third hip joint driving piece;
the axis of the output end of the third hip joint driving piece is vertical to the axes of the first joint shaft and the second joint shaft.
2. The lower extremity exoskeleton robot multi-degree of freedom hip joint mechanism of claim 1, wherein the first hip joint component is horizontally arranged, the first hip joint driver is arranged below the first hip joint component, and the first hip joint driver and the first joint shaft are in transmission connection through a belt or a gear.
3. The lower extremity exoskeleton robot multi-degree of freedom hip joint mechanism of claim 1 or 2, wherein the first hip joint driving member comprises a first motor and a first elastic coupling, the first elastic coupling is connected with an output end of the first motor, and an output end of the first elastic coupling is in transmission connection with the first joint shaft.
4. The lower extremity exoskeleton robot multi-degree of freedom hip joint mechanism of claim 1 wherein said second hip joint member is a frame plate structure, said second hip joint driver is disposed within said second hip joint member, and said second joint shaft extends from one end of said second hip joint member and is coupled to said first joint shaft.
5. The lower extremity exoskeleton robot multi-degree of freedom hip joint mechanism of claim 4, wherein the second hip joint driving member comprises a second motor and a second elastic coupling, the second motor is fixedly arranged on a mounting seat in the second hip joint member, the second elastic coupling is connected with the output end of the second motor, and the second joint shaft is connected with the output end of the second elastic coupling.
6. The lower extremity exoskeleton robot multi-degree of freedom hip joint mechanism of claim 1, wherein the third hip joint driving member comprises a third motor and a third elastic coupling, the third motor is fixedly arranged on the second hip joint member, the third elastic coupling is connected to an output end of the third motor, and one end of the third hip joint member is connected to an output end of the third elastic coupling.
7. The lower extremity exoskeleton robot multi-degree of freedom hip joint mechanism of claim 1, wherein the first joint axis is arranged along a sagittal axis of a human body, the second joint axis is arranged along a vertical axis of the human body, and the output axis of the third hip joint drive is arranged along a coronal axis of the human body.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202120079808.9U CN214352437U (en) | 2021-01-12 | 2021-01-12 | Multi-degree-of-freedom hip joint mechanism of lower limb exoskeleton robot |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202120079808.9U CN214352437U (en) | 2021-01-12 | 2021-01-12 | Multi-degree-of-freedom hip joint mechanism of lower limb exoskeleton robot |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN214352437U true CN214352437U (en) | 2021-10-08 |
Family
ID=77954851
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202120079808.9U Active CN214352437U (en) | 2021-01-12 | 2021-01-12 | Multi-degree-of-freedom hip joint mechanism of lower limb exoskeleton robot |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN214352437U (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114376857A (en) * | 2021-12-08 | 2022-04-22 | 浙江大学 | Horizontal lower limb six-degree-of-freedom full-joint power-assisted rehabilitation mechanical leg |
-
2021
- 2021-01-12 CN CN202120079808.9U patent/CN214352437U/en active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114376857A (en) * | 2021-12-08 | 2022-04-22 | 浙江大学 | Horizontal lower limb six-degree-of-freedom full-joint power-assisted rehabilitation mechanical leg |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102211627B (en) | Four-leg robot mechanism based on bionic design | |
| CN201642750U (en) | Lower limb rehabilitation training robot | |
| CN112643651B (en) | Telescopic bionic outer limb mechanical arm | |
| CN113440372B (en) | Flexibly-driven knee joint exoskeleton | |
| CN112060056A (en) | Exoskeleton robot with motors and exoskeleton lower limb gravity centers collinear and control method | |
| CN214352437U (en) | Multi-degree-of-freedom hip joint mechanism of lower limb exoskeleton robot | |
| Bian et al. | Mechanical design of EFW Exo II: A hybrid exoskeleton for elbow-forearm-wrist rehabilitation | |
| WO2024011824A1 (en) | Hip joint exoskeleton for transverse walking rehabilitation | |
| CN110539289B (en) | Three-degree-of-freedom centering hip joint mechanism of power-assisted exoskeleton | |
| CN212490675U (en) | Eight-degree-of-freedom upper limb rehabilitation training arm and device | |
| CN104306130B (en) | Coupling drive based shoulder-elbow joint rehabilitation trainer | |
| Weerasingha et al. | C-JAE: 3 DOF robotic ankle exoskeleton with compatible joint axes | |
| CN113134841B (en) | Humanoid robot based on joint-crossing cooperative driving | |
| CN113771003B (en) | Wearable electric intelligent disabled-assisting exoskeleton body posture control device | |
| CN111803329B (en) | Elbow exoskeleton for rehabilitation robot | |
| CN215132622U (en) | Shoulder joint assembly for upper limb rehabilitation | |
| CN111000699B (en) | Rigid-flexible hybrid upper limb auxiliary motion device | |
| CN109330822B (en) | Gait rehabilitation training robot | |
| CN113081667A (en) | Twelve-degree-of-freedom gait simulation device | |
| CN215358522U (en) | Multi-degree-of-freedom ankle joint structure of lower limb exoskeleton robot | |
| CN112873177B (en) | Lower limb exoskeleton robot | |
| CN212312028U (en) | Lower limb exoskeleton robot with collinear motor gravity center and exoskeleton lower limb gravity center | |
| CN215081735U (en) | Lower limb exoskeleton robot auxiliary mechanism | |
| Sun et al. | Development of dual-arm lower limb rehabilitation robot for hemiplegic patients | |
| CN217828331U (en) | Multi-degree-of-freedom full-range lower limb rehabilitation robot |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |