CN212391663U - 光学瞄准系统及摄像模组和电子设备 - Google Patents
光学瞄准系统及摄像模组和电子设备 Download PDFInfo
- Publication number
- CN212391663U CN212391663U CN202022057769.0U CN202022057769U CN212391663U CN 212391663 U CN212391663 U CN 212391663U CN 202022057769 U CN202022057769 U CN 202022057769U CN 212391663 U CN212391663 U CN 212391663U
- Authority
- CN
- China
- Prior art keywords
- lens
- optical axis
- distance
- optical
- image side
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Landscapes
- Lenses (AREA)
Abstract
本实用新型涉及光学技术领域,具体涉及一种光学瞄准系统及摄像模组和电子设备;所述光学瞄准系统包括光阑及若干透镜组合;本实用新型的有益效果在于:(1)提供一种光学瞄准系统,瞄准距离远,测量精度高,视场角大,能实现瞄准距离在0.5m到100m范围内的高精度测量,半视场角可达16°,在各视场角及各瞄准距离下的弥散斑均匀且圆度好,色差及像差均较小;(2)结构小巧紧凑,采用无胶合的分离式结构,包括5个镜片,系统总长小于20mm,最大通光孔径小于10mm。
Description
技术领域
本实用新型涉及光学技术领域,具体涉及一种光学瞄准系统及摄像模组和电子设备。
背景技术
机器在动态运行过程中与其他事物发生关联或干涉的场景中,例如飞机空中加油、水下无人航行器交会对接、航天器交会对接、大型机器人自动装卸货物等,需要预先准确捕捉对方的姿态信息以供机器驱动者为实现交会对接提供决策参考。
由透镜和光阑等光学元件按次序组成的光学系统可以用来成像或做其他光学信息处理,在将传统光学系统用于上述特定场景下的姿态捕捉时,往往存在远距离无法捕捉、近距离无法瞄准的难题,因此有必要开发一款视场角更大、瞄准精度更高的光学系统,以满足在快速运动场景下的姿态捕捉需要。
实用新型内容
本实用新型的首要目的是提供一种具有大视场角、高精度的光学瞄准系统。
为了实现上述目的,本实用新型采用的技术方案为:
一种光学瞄准系统,沿着光轴由物侧到像侧依次包括:
具有正屈折力的第一透镜,所述第一透镜的物侧面为凸面,像侧面为凹面;
具有正屈折力的第二透镜,所述第二透镜的物侧面为凸面,像侧面为凹面;
光阑;
具有负屈折力的第三透镜,所述第三透镜的物侧面为凹面,像侧面为凸面;
具有正屈折力的第四透镜,所述第四透镜的物侧面为凸面,像侧面为凸面;
具有负屈折力的第五透镜,所述第五透镜的物侧面为凹面,像侧面为凸面;
像平面。
本实用新型的优选方案为,
所述第一透镜的物侧面于光轴上的曲率半径R1=6.042mm;
所述第一透镜的像侧面于光轴上的曲率半径R2=18.465mm;
所述第二透镜的物侧面于光轴上的曲率半径R3=3.435mm;
所述第二透镜的像侧面于光轴上的曲率半径R4=2.672mm;
所述第三透镜的物侧面于光轴上的曲率半径R5=-3.678mm;
所述第三透镜的像侧面于光轴上的曲率半径R6=-5.741mm;
所述第四透镜的物侧面于光轴上的曲率半径R7=18.363mm;
所述第四透镜的像侧面于光轴上的曲率半径R8=-10.051mm;
所述第五透镜的物侧面于光轴上的曲率半径R9=-8.335mm;
所述第五透镜的像侧面于光轴上的曲率半径R10=-26.172mm;
所述第一透镜的像侧面至所述第二透镜的物侧面于光轴上的距离D1=0.622mm;
所述第二透镜的像侧面至所述光阑于光轴上的距离D2=1.777mm;
所述光阑至所述第三透镜的物侧面于光轴上的距离D3=1.820mm;
所述第三透镜的像侧面至所述第四透镜的物侧面于光轴上的距离D4=1.987mm;
所述第四透镜的像侧面至所述第五透镜的物侧面于光轴上的距离D5=2.710mm;
所述第五透镜的像侧面至所述像平面于光轴上的距离D6=2.705mm;
所述第一透镜的物侧面至所述第一透镜的像侧面于光轴上的距离S1=1.353mm;
所述第二透镜的物侧面至所述第二透镜的像侧面于光轴上的距离S2=1.042mm;
所述第三透镜的物侧面至所述第三透镜的像侧面于光轴上的距离S3=1.353mm;
所述第四透镜的物侧面至所述第四透镜的像侧面于光轴上的距离S4=1.390mm;
所述第五透镜的物侧面至所述第五透镜的像侧面于光轴上的距离S5=1.353mm。
本实用新型的优选方案为,所述光学瞄准系统中至少一个透镜的物侧面和/或像侧面为球面。
本实用新型的优选方案为,所述光学瞄准系统中任一透镜的物侧面和/或像侧面均为球面。
本实用新型的另一个目的在于提供一种摄像模组,包括如上任一所述的光学瞄准系统。
本实用新型的再一个目的所提供一种电子设备,包括固定件和如上所述的摄像模组,摄像模组设置于所述固定件。
本实用新型的有益效果在于:
(1)提供一种光学瞄准系统,瞄准距离远,测量精度高,视场角大,能实现瞄准距离在0.5m到100m范围内的高精度测量,半视场角可达16°,在各视场角及各瞄准距离下的弥散斑均匀且圆度好,色差及像差均较小。
(2)结构小巧紧凑,采用无胶合的分离式结构,包括5个镜片,系统总长小于20mm,最大通光孔径小于10mm。
附图说明
图1为本实用新型实施例的结构示意图;
图2为本实用新型实施例的光路示意图;
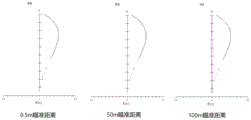
图3为本实用新型实施例的0.5m/50m/100m瞄准距离点列图;
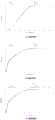
图4为本实用新型实施例的0.5m/50m/100m畸变曲线;
图5为本实用新型实施例的0.5m/50m/100m能量集中度曲线。
具体实施方式
以下结合实施例对本实用新型做进一步的说明。
参阅图1,一种光学瞄准系统,沿着光轴由物侧到像侧依次包括:
具有正屈折力的第一透镜1,所述第一透镜1的物侧面为凸面,像侧面为凹面;
具有正屈折力的第二透镜2,所述第二透镜2的物侧面为凸面,像侧面为凹面;
光阑3;
具有负屈折力的第三透镜4,所述第三透镜4的物侧面为凹面,像侧面为凸面;
具有正屈折力的第四透镜5,所述第四透镜5的物侧面为凸面,像侧面为凸面;
具有负屈折力的第五透镜6,所述第五透镜6的物侧面为凹面,像侧面为凸面;
像平面7。
上述光学瞄准系统的镜片结构与材质情况如下表1所示。
表1光学瞄准系统的镜片结构与材质情况

注:所述曲率半径为透镜的物侧面和/或像侧面于光轴上的曲率半径。
所述透镜厚度为透镜的物侧面至该透镜像侧面于光轴上的距离。
所述空气间隔表示前一透镜的像侧面至后一透镜的物侧面于光轴上的距离。
由上述结构组成的光学瞄准系统达到了如下光学指标:
1、总焦距=15mm;
2、半视场角=16°;
3、F数=3;
4、成像光谱=800—860nm;
5、系统总长=18.11mm;
6、瞄准范围=0.5m-100m。
7、弥散斑的均方根(RMS)直径≤80微米;
8、弥散斑能量中心偏移量≤4微米;
9、对准精度小于1′;
10、最大通光孔径≤10mm。
参阅图2,本光学瞄准系统的光学路线如下:目标标志器发出的点光源以不同的入射角依次通过第一透镜1,第二透镜2,光阑3,第三透镜4,第四透镜5,第五透镜6在像平面7上成像,形成光斑。
定义所得光斑的光强分布为弥散斑。
图3为本实施方式所述光学瞄准系统在瞄准距离分别为0.5m、50m和100m下所形成弥散斑的点列图,从图中可以看出,弥散斑近似为圆形,圆度很好,大小基本一致,均匀,对称,光斑的均方根(RMS)直径以及对应探测器能量中心偏移量满足姿态测量精度的要求。
图4为本实施方式所述光学瞄准系统在瞄准距离分别为0.5m、50m和100m下的畸变曲线,从图中可以看出,各瞄准距离的相对畸变均小于0.1%。
图5是为本实施方式所述光学瞄准系统在瞄准距离分别为0.5m、50m和100m下弥散斑质心的能量集中度曲线,从图中可以看出,直径90微米内能量集中大于90%,直径75微米内能量集中大于80%。
Claims (5)
1.一种光学瞄准系统,其特征在于,沿着光轴由物侧到像侧依次包括:
具有正屈折力的第一透镜,所述第一透镜的物侧面为凸面,像侧面为凹面;
具有正屈折力的第二透镜,所述第二透镜的物侧面为凸面,像侧面为凹面;
光阑;
具有负屈折力的第三透镜,所述第三透镜的物侧面为凹面,像侧面为凸面;
具有正屈折力的第四透镜,所述第四透镜的物侧面为凸面,像侧面为凸面;
具有负屈折力的第五透镜,所述第五透镜的物侧面为凹面,像侧面为凸面;
像平面。
2.根据权利要求1所述的光学瞄准系统,其特征在于:
所述第一透镜的物侧面于光轴上的曲率半径R1=6.042mm;
所述第一透镜的像侧面于光轴上的曲率半径R2=18.465mm;
所述第二透镜的物侧面于光轴上的曲率半径R3=3.435mm;
所述第二透镜的像侧面于光轴上的曲率半径R4=2.672mm;
所述第三透镜的物侧面于光轴上的曲率半径R5=-3.678mm;
所述第三透镜的像侧面于光轴上的曲率半径R6=-5.741mm;
所述第四透镜的物侧面于光轴上的曲率半径R7=18.363mm;
所述第四透镜的像侧面于光轴上的曲率半径R8=-10.051mm;
所述第五透镜的物侧面于光轴上的曲率半径R9=-8.335mm;
所述第五透镜的像侧面于光轴上的曲率半径R10=-26.172mm;
所述第一透镜的像侧面至所述第二透镜的物侧面于光轴上的距离D1=0.622mm;
所述第二透镜的像侧面至所述光阑于光轴上的距离D2=1.777mm;
所述光阑至所述第三透镜的物侧面于光轴上的距离D3=1.820mm;
所述第三透镜的像侧面至所述第四透镜的物侧面于光轴上的距离D4=1.987mm;
所述第四透镜的像侧面至所述第五透镜的物侧面于光轴上的距离D5=2.710mm;
所述第五透镜的像侧面至所述像平面于光轴上的距离D6=2.705mm;
所述第一透镜的物侧面至所述第一透镜的像侧面于光轴上的距离S1=1.353mm;
所述第二透镜的物侧面至所述第二透镜的像侧面于光轴上的距离S2=1.042mm;
所述第三透镜的物侧面至所述第三透镜的像侧面于光轴上的距离S3=1.353mm;
所述第四透镜的物侧面至所述第四透镜的像侧面于光轴上的距离S4=1.390mm;
所述第五透镜的物侧面至所述第五透镜的像侧面于光轴上的距离S5=1.353mm。
3.根据权利要求1所述的光学瞄准系统,其特征在于:所述光学瞄准系统中任一透镜的物侧面和/或像侧面均为球面。
4.一种摄像模组,其特征在于,包括权利要求1-3任一项所述的光学瞄准系统。
5.一种电子设备,其特征在于,包括固定件和权利要求4所述的摄像模组,摄像模组设置于所述固定件。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202022057769.0U CN212391663U (zh) | 2020-09-18 | 2020-09-18 | 光学瞄准系统及摄像模组和电子设备 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202022057769.0U CN212391663U (zh) | 2020-09-18 | 2020-09-18 | 光学瞄准系统及摄像模组和电子设备 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN212391663U true CN212391663U (zh) | 2021-01-22 |
Family
ID=74253004
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202022057769.0U Active CN212391663U (zh) | 2020-09-18 | 2020-09-18 | 光学瞄准系统及摄像模组和电子设备 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN212391663U (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111965807A (zh) * | 2020-09-18 | 2020-11-20 | 安徽科技学院 | 光学瞄准系统及摄像模组和电子设备 |
-
2020
- 2020-09-18 CN CN202022057769.0U patent/CN212391663U/zh active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111965807A (zh) * | 2020-09-18 | 2020-11-20 | 安徽科技学院 | 光学瞄准系统及摄像模组和电子设备 |
| CN111965807B (zh) * | 2020-09-18 | 2025-07-15 | 安徽科技学院 | 光学瞄准系统及摄像模组和电子设备 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN103399392B (zh) | 一种大视场高精度的星敏感器光学系统 | |
| CN111965807B (zh) | 光学瞄准系统及摄像模组和电子设备 | |
| WO2019148639A1 (zh) | 准直镜头 | |
| CN107589518B (zh) | 光学镜头及具有该光学镜头的激光对中测量设备 | |
| CN105531616B (zh) | 红外大幅面远心激光打标Fθ镜头 | |
| CN212391663U (zh) | 光学瞄准系统及摄像模组和电子设备 | |
| CN110824682B (zh) | 一种用于光纤熔接机纤芯识别的显微成像物镜及其成像方法 | |
| CN115248496B (zh) | 一种高清晰度光学镜头及高性能激光雷达 | |
| CN111638588B (zh) | 一种光学变焦系统、镜头和摄像机 | |
| CN117031698A (zh) | 一种多光谱广角镜头 | |
| CN117250736B (zh) | 一种大像面高分辨率宽光谱星敏感器光学系统 | |
| CN217238508U (zh) | 一种双远心镜头和光学器件 | |
| LU504737B1 (en) | Optical Aiming System, Camera Module and Electronic Equipment | |
| CN217443630U (zh) | 一种高分辨率摄像物镜光学系统 | |
| CN105759394A (zh) | 一种大景深大视场宽温变高像质光学系统 | |
| US10393999B2 (en) | Six-aspheric-surface lens | |
| CN112099221B (zh) | 一种长工作距离的数字显微光学成像装置 | |
| CN205301688U (zh) | 一种大景深大视场宽温变高像质光学系统 | |
| CN212433493U (zh) | 一种搭配液体镜头的光学成像镜头 | |
| CN210051957U (zh) | 一种变倍镜头及光学设备 | |
| CN116609926A (zh) | 像移补偿光学系统和航空遥感系统 | |
| CN221261370U (zh) | 一种无人机使用的近距离探测镜头 | |
| CN110873951A (zh) | 一种畸变小高精度的工业镜头 | |
| CN220105400U (zh) | 一种光学成像系统和光学镜头 | |
| CN111796399B (zh) | 一种静态星模拟器投影光学系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |