CN211494309U - 一种舵轮agv移动平台 - Google Patents
一种舵轮agv移动平台 Download PDFInfo
- Publication number
- CN211494309U CN211494309U CN201921738589.XU CN201921738589U CN211494309U CN 211494309 U CN211494309 U CN 211494309U CN 201921738589 U CN201921738589 U CN 201921738589U CN 211494309 U CN211494309 U CN 211494309U
- Authority
- CN
- China
- Prior art keywords
- steering wheel
- mounting plate
- assembly
- framework
- weldment
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000000725 suspension Substances 0.000 claims abstract description 19
- 230000000007 visual effect Effects 0.000 claims abstract description 4
- 238000000034 method Methods 0.000 claims description 13
- 230000008569 process Effects 0.000 claims description 8
- 230000000712 assembly Effects 0.000 claims description 4
- 238000000429 assembly Methods 0.000 claims description 4
- 238000013461 design Methods 0.000 claims description 4
- 230000006835 compression Effects 0.000 claims description 3
- 238000007906 compression Methods 0.000 claims description 3
- 230000007246 mechanism Effects 0.000 abstract description 11
- 239000000463 material Substances 0.000 abstract description 3
- 150000001875 compounds Chemical class 0.000 abstract 1
- 238000012423 maintenance Methods 0.000 description 5
- 238000006243 chemical reaction Methods 0.000 description 4
- 230000007613 environmental effect Effects 0.000 description 4
- 239000004753 textile Substances 0.000 description 3
- 238000004804 winding Methods 0.000 description 3
- 241000380131 Ammophila arenaria Species 0.000 description 2
- 229910000831 Steel Inorganic materials 0.000 description 2
- 230000017525 heat dissipation Effects 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 210000001503 joint Anatomy 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000009987 spinning Methods 0.000 description 2
- 239000010959 steel Substances 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 238000003466 welding Methods 0.000 description 2
- 230000002411 adverse Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 239000003086 colorant Substances 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000008439 repair process Effects 0.000 description 1
- 125000006850 spacer group Chemical group 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
- 238000013024 troubleshooting Methods 0.000 description 1
- 238000009941 weaving Methods 0.000 description 1
Images




Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/14—Plug-in electric vehicles
Landscapes
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
本实用新型公开了一种舵轮AGV移动平台,包括骨架焊件,骨架焊件底部布置脚轮组件、舵轮悬挂组件、支撑组件;舵轮悬挂组件包括:与骨架焊件固定的上安装板、通过弹性件作用于上安装板底面的舵轮安装板、固定在舵轮安装板底面上的舵轮;支撑组件包括:与骨架焊件固定的电推杆及导向套、固定在电推杆伸出轴上的支撑轴、套在支撑轴上且固定在导向套上的圆法兰无油衬套;在骨架焊接的底面上还设有光源和视觉传感器;视觉传感器包括二维码识别模块;骨架焊件的前后两侧均安装有超声波收发组件;骨架焊件的外壳表面上设置有触边开关、毛刷及充电组件;骨架焊件上还设有导航雷达和安全雷达。该舵轮AGV移动平台可以替代人工作业,自动转运物料或搭载自动化机构完成某些复合任务,降低了工人劳动量,提高了工作效率。
Description
技术领域
本实用新型涉及AGV移动设备领域,特别是一种舵轮AGV移动平台。
背景技术
AGV小车是指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,是工业应用中不需驾驶员的搬运车,以可充电的蓄电池为其动力来源。一般可通过激光导航控制系统控制其运动路线以及行进方式,或利用电磁轨道或二维码来设确定其行进路线,电磁轨道或二维码黏贴于地板上,无人搬运车则依靠识别电磁轨道或二维码信息进行移动。
目前,部分AGV小车上可以搭载机械臂,通过机械臂的抓取进行完整的输送动作。但是,在AGV小车运行的过程中因为路径情况、抓取情况的不同可能对小车运行带来诸多影响。例如,当抓取动作过程中因为工件重量、机械臂自身重量产生力臂、重心位置变化时,可能对AGV底部稳定性产生不良影响,使AGV平台产生晃动。
为了进一步提高AGV小车的自动智能控制功能,需要在AGV小车上设计精密的传动结构,同时需要其具备智能的工控机、传感器、控制系统等,这样才能确保AGV平台小车在无人环境下进行自主、智能的运行。
实用新型内容
本实用新型的技术方案是:一种舵轮AGV移动平台,包括形成承载框架的骨架焊件,在骨架焊件的底部布置脚轮组件。骨架焊件是由钢管焊接而成,其上布置有吊装孔。脚轮组件包括脚轮及支架,脚轮通过支架固定在骨架焊件上,可以承载和自由滚动。
骨架焊件的底部设置有作用于地面上的舵轮悬挂组件、支撑组件;舵轮悬挂组件用于平台的移动或方向调整,通过舵轮的转动可以使AGV平台移动或转至各个运动方向。支撑组件可以将平台整体提升至距离地面10mm的高度,其采用三点式支撑法,可以保证平台的稳定性。
舵轮悬挂组件包括:舵轮组件及安装板组件;安装板组件包括上安装板、舵轮安装板及下安装板;上安装板固定于骨架焊件上、舵轮固定于舵轮安装板上;
支撑组件包括:与骨架焊件固定的电推杆及导向套、固定在电推杆伸出轴的支撑轴、套在支撑轴上且固定于导向套上的圆法兰无油衬套;机械臂工作时,三组支撑组件(机械臂工作侧安装两组)的支撑轴同时伸出,将平台升起至距离地面10mm的高度,使机械臂工作时平台足够稳定。
在骨架焊件的底部上还设有光源和视觉传感器;视觉传感器包括二维码识别模块;光源、视觉传感器安装在平台下方,工位点的地面上粘贴二维码,光源辅助视觉传感器读取其在二维码坐标系下的X、Y、θ值,并传输至控制系统,控制系统经过坐标系转换将AGV平台相对地面二维码的X、Y、θ的偏差反馈给机械臂,机械臂完成偏差补偿,自动完成某些特定任务。
骨架焊件的前后两侧均安装有四组超声波收发组件,检测在设定区域内的障碍物。
骨架焊件的外壳表面上设置有触边开关、毛刷及充电组件;触边开关碰到障碍物立即触发,使平台停止运动。若移动平台工作在纺织车间,毛刷能够防止行走过程中丝束进入车体内部,缠绕脚轮和舵轮,其中脚轮采用防缠丝设计,降低了维护保养的频率。
骨架焊件上还设有导航雷达和安全雷达。导航雷达可以识别环境特征,传输至导航系统,导航系统和控制系统控制平台移动至指定位置;安全雷达安装在骨架对角线端部,可以根据平台前进、后退、左右横移、前进右转、前进左转、后退右转、后退左转等不同的移动方式,切换不同的安全防护区域,检测到障碍物时,平台立即停止运动。
优选的是,舵轮悬挂组件包括:舵轮组件及安装板组件,舵轮组件包括转向齿轮、转向电机、行走轮及行走电机。行走电机驱动行走轮转动可以产生AGV小车移动所需的驱动力,行走电机及行走轮需要得到转向力,则是由转向电机带动转向齿轮产生的。安装板组件包括上安装板、舵轮安装板及下安装板。上安装板用于舵轮悬挂组件与AGV车体固定,舵轮安装板用于安装舵轮组件,下安装板限制舵轮安装板的下极限位置,并提高了悬挂组件的刚度。转向齿轮以轴向竖直回转方式固定于舵轮安装板上,转向齿轮并通过定位销与舵轮安装板进行定位,并通过螺栓联接。舵轮组件可以以舵轮安装板为基座扭转方向,为AGV小车提供转向动力。
具体的,舵轮安装板的上、下两侧分别为上安装板和下安装板,上安装板与下安装板之间固定导向轴以实现等间距固定和结构支撑。导向轴的一端固定至下安装板上,其另一端则固定至上安装板。同时,导向轴穿过舵轮安装板上的圆法兰无油衬套,圆法兰无油衬套则固定于舵轮安装板上的安装孔内。
下安装板与舵轮组件之间有高度差,因此下安装板上加工有允许舵轮组件穿过的贯穿孔。在上安装板与舵轮安装板之间的导向轴轴段上套装弹簧。
具体的,导向轴的上端设有用于调节弹簧压缩量的防松螺母,可以实现悬挂与地面之间的压力调节;导向轴的下端套有用于防止圆法兰无油衬套碰撞下安装板的缓冲垫片。
优选的是,还包括抽拉式的电控箱组件;包括:顶板、底板、侧板、前板、后板组成的封闭的电控箱体。电控箱体内安装包括:工控机、硬盘、电路板、风扇等电气元件,电气元件的插头朝向外侧,方便插拔。顶板及侧板上开设U型散热孔,后板上开设风扇散热孔。电控箱体内安装有两组风扇,每组风扇对应一个所述风扇散热孔。电控箱体放置于敞口的托板内,电控箱体的底板插入滚轮条和长垫片之间的空间内,抽拉电控箱时滚轮条滚动、底板与长垫片之间相对滑动,从而可以实现电控箱体的抽拉。
具体的,在托板的底壁上安装有滚轮条,滚轮条上为均匀间隔的一系列滚轮,滚轮条压在电控箱体底板的两侧突出部分的上表面,抽拉过程中滚轮条上的滚轮滚动。托板上还安装有长条垫片,长条垫片位于电控箱体的底板下表面,抽拉过程中两者之间产生相对滑动。
托板内还安装有加工有斜面的后挡块,后挡块位于抽拉行程末端,通过斜面顶紧电控箱体的底板。底板外侧还加工有用于固定电控箱体位置的螺栓孔,在该螺栓孔处锁紧螺栓可以将电控箱底板与托板固定,从而将电控箱体固定。
电控箱体的前侧板上还安装有拉手及用于插接插头的插拔孔,推拉拉手就可以顺利的推动或抽拉出电控箱体。
优选的是,还包括电池组件;电池组件通过线缆连接所述充电组件。当平台电量低于20%时,自主移至充电站点,充电组件与充电桩极片对接,自动完成充电,无需人工干预。
优选的是,骨架焊件的每个对角位置上各设置一个急停按钮。四组急停按钮分别安装在四个对角位置,方便紧急情况时按下。
优选的是,还包括控制系统;控制系统包括:收发信号的天线模块、传感信号收集的接收模块、导航模块、电路及电气控制的电控模块。
本实用新型的优点是:该舵轮AGV移动平台可以负载2t重物,平台底部安装视觉传感器、光源,采用激光导航+视觉定位方式,提高了定位精度;AGV移动平台可以实现前进、后退、横移、转弯等功能,可以停靠在不同的工位点、充电站点等设定位置点;平台上可以搭载一个或多个机械臂、其它自动化机构等,可以应用在纺织车间或其它车间,替代人工作业,完成某些特定工作,降低了工人劳动量,提高了工作效率;也可以搭载输送线体,自动完成物料转运;并且可以方便调节悬挂机构与地面之间的下压力,适应了不同的路面状况和负载要求,扩大了移动平台的适用范围。
附图说明
下面结合附图及实施例对本实用新型作进一步描述:
图1是舵轮AGV移动平台等轴测视角下侧板隐藏后的立体图;
图2是舵轮AGV移动平台等轴测视角的立体图;
图3是舵轮AGV移动平台底部的等轴测视角立体图;
图4是舵轮悬挂组件的立体图;
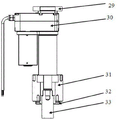
图5是支撑组件的立体图;
其中:1、骨架焊件;2、舵轮悬挂组件;3、脚轮组件;4、电池组件;5、电控箱组件;6、支撑组件;7、指示灯;8、天线模块;9、导航雷达;10、外壳组件;11、安全雷达;12、充电组件;13、急停按钮;14、超声波;15、触边开关;16、毛刷;17、光源;18、视觉传感器;19、上安装板;20、防松螺母;21、弹簧;22、定位销;23、舵轮安装板;24、圆法兰无油衬套;25、导向轴;26、缓冲垫片;27、下安装板;28、舵轮;29、推杆安装板;30、电推杆;31、导向套;32、圆法兰无油衬套;33、支撑轴。
具体实施方式
实施例:
如附图1-5所示,
骨架焊件1由钢管焊接而成,加工有吊装孔,方便运输、维修和保养时吊起。
舵轮悬挂组件2、脚轮组件3、电池组件4、电控箱组件5、支撑组件6、指示灯7、天线8、导航雷达9、外壳组件10、安全雷达11、充电组件12、急停按钮13、超声波14、触边开关15、毛刷16、光源17、视觉传感器18都安装在骨架焊件1上。
电池组件4、电控箱组件5都设计为抽拉式,方便抽出、更换电气件、维护保养。
指示灯7共有四组,可以发出不同颜色的光,反应AGV平台不同的工作状态或故障状态。天线模块8接收上位机系统发出的信号,导航雷达9可以识别环境特征,传输至导航系统,导航系统和控制系统控制平台移动至指定位置。
安全雷达11安装在骨架对角线端部,可以根据平台前进、后退、左右横移、前进右转、前进左转、后退右转、后退左转等不同的移动方式,切换不同的安全防护区域,检测到障碍物时,平台立即停止运动。
当平台电量低于20%时,自主移至充电站点,充电组件12与充电桩极片对接,自动完成充电,无需人工干预;四组急停按钮13分别安装在四个对角位置,方便紧急情况时按下;平台前后侧各安装四个超声波14,检测在设定区域内的障碍物;平台四周都安装有触边开关15,碰到障碍物立即触发,使平台停止运动;平台四周安装毛刷16,防止行走过程中丝束或杂物进入车体内部,缠绕脚轮和舵轮,其中脚轮采用防缠丝设计,降低了维护保养的频率。
舵轮悬挂组件2通过上安装板19安装在骨架焊件1上,上安装板19与骨架焊件1之间通过定位销定位,机械臂或自动化机构可以安装在上安装板19上;导向轴25一端安装在上安装板19上,另一端安装在下安装板27上;圆法兰无油衬套24安装在舵轮安装板23上,对导向轴25进行导向;缓冲垫片26为塑性材质,套在导向轴25上,防止圆法兰无油衬套24碰撞下安装板27;舵轮安装板23可以在上安装板19、下安装板27之间上下移动;上安装板19、舵轮安装板23加工有缺口(防呆设计),保证缺口相对位置,更加方便安装;舵轮组件28安装在舵轮安装板23上,定位销22起到定位作用,保证了舵轮组件28与舵轮安装板23之间的相对位置,提高了AGV平台的控制精度;四组弹簧21分别套在四组导向轴25上,下压舵轮安装板23;旋转防松螺母20可以方便调节弹簧21的压缩量,即调节弹簧21的弹力,从而使舵轮和地面之间保持所需的预压力,适应了不同的路面状况和负载要求;舵轮28为AGV移动平台提供了足够的驱动力;并且舵轮28的轮子具有两个旋转自由度,可以实现前进转动和旋转,从而使AGV移动平台实现任意方向移动;脚轮组件3承受了负载重量和部分的平台自重。
支撑组件6通过推杆安装板29安装在骨架焊件1上;电推杆30安装在推杆安装板29上;支撑轴33安装在电推杆30的伸出轴上,并穿过圆法兰无油衬套32;导向套31安装在骨架焊件1上;圆法兰无油衬套32安装在导向套31上,对支撑轴33起到导向作用。
AGV平台移动至工位点后,首先实现初步定位,三组支撑组件(机械臂工作侧安装两组)的支撑轴33同时伸出,将平台升起至距离地面10mm的高度,使机械臂工作时平台足够稳定。
光源17、视觉传感器18安装在平台下方,工位点的地面上粘贴二维码,光源17辅助视觉传感器18读取其在二维码坐标系下的X、Y、θ值,并传输至控制系统,控制系统经过坐标系转换将AGV平台相对地面二维码的X、Y、θ的偏差反馈给机械臂,机械臂完成偏差补偿后,自动完成特定工作。
工作流程:
平台上可以搭载一个或多个机械臂、其它自动化机构等,可以应用在纺织车间或其它车间,替代人工作业,自动完成特定工作,降低了工人劳动量,提高了工作效率;由于大部分的复合任务对机械臂和AGV移动平台定位精度要求较高,所以采用AGV平台移动至工位点后,先实现初步定位,视觉传感器读取其相对地面二维码的X、Y、θ的偏差,控制系统经过坐标系转换将偏差反馈给机械臂,机械臂完成偏差补偿的方式,自动完成特定工作,降低了对移动平台的定位精度要求,减少了移动平台的定位时间;
机械臂工作时容易引起平台晃动,AGV平台安装了三组支撑机构(三点支撑方式),机械臂工作时,支撑机构的导向轴同时推出,将平台升起至距离地面10mm的高度,保证了平台的稳定性,减少了平台的晃动,从而确保了机械臂的定位精度;机械臂工作完成后,三组支撑机构的导向轴同时收回,不影响平台的移动。
若工作在纺织车间,车间地面上有丝束,平台四周安装毛刷,防止丝束进入车体内部;AGV平台具有安全雷达、超声波、触边开关、急停按钮等多重安全机制,保证了工作区域的人机安全;当AGV平台电量低于20%时,自主移至充电站点,自动完成充电,无需人工干预。
综上所述,本方案的优势是:
1、平台上可以搭载一个或多个机械臂、其它自动化机构等,可以应用在纺织或其它车间,替代人工作业,自动完成特定工作,降低了工人劳动量,提高了工作效率;
2、舵轮悬挂组件中的上安装板与骨架焊件之间通过定位销定位,舵轮与在舵轮安装板之间通过定位销定位,保证了两者之间的相对位置,提高了AGV平台的控制精度;
3、旋转防松螺母可以方便调节弹簧的弹力,从而使舵轮和地面之间保持所需的预压力,适应了不同的路面状况和负载要求,扩大了移动平台的适用范围。
4、电池组件、电控箱组件都设计为抽拉式,方便取出和更换,减少了故障排查、维护保养需要的时间;
5、安全雷达可以根据平台的移动方式切换不同的安全防护区域,并具有超声波、触边开关、急停按钮等多重安全机制,保证了工作区域的人机安全;
6、平台四周安装毛刷,防止行走过程中丝束或其它杂物进入车体内部而缠绕脚轮和舵轮,降低了维护保养的频率;
7、平台初步定位后,视觉传感器读取其在二维码坐标系下X、Y、θ值,控制系统经过坐标系转换将偏差反馈给机械臂,机械臂自动完成补偿偏差,降低了AGV平台的定位精度要求,减少了定位时间,提高了工作效率;
8、当AGV平台低电量时,自主移至充电站点,充电组件与充电桩极片对接,自动完成充电;充电桩在没有接收到充电任务时不通电,保证了工作区域的人机安全。
上述实施例仅例示性说明本实用新型的原理及其功效,而非用于限制本实用新型的。任何熟悉此技术的人士皆可在不违背本实用新型的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本实用新型的所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本实用新型的权利要求所涵盖。
Claims (9)
1.一种舵轮AGV移动平台,包括形成承载框架的骨架焊件,在骨架焊件的底部布置脚轮组件;其特征在于:
所述骨架焊件的底部设置有作用于地面上的舵轮悬挂组件、支撑组件;所述舵轮悬挂组件包括:舵轮组件及安装板组件,所述安装板组件包括上安装板、舵轮安装板及下安装板;所述支撑组件包括:与骨架焊件固定的电推杆及导向套、固定在电推杆伸出轴上的支撑轴、套在支撑轴上且固定于导向套上的圆法兰无油衬套;
在骨架焊接的底面上还设有光源和视觉传感器;所述视觉传感器包括二维码识别模块;所述骨架焊件的前后两侧均安装有超声波收发组件;
所述骨架焊件的外壳侧表面上设置有触边开关、毛刷及充电组件;
所述骨架焊件上还设有导航雷达和安全雷达。
2.根据权利要求1所述的一种舵轮AGV移动平台,其特征在于:所述舵轮悬挂组件包括:舵轮组件及安装板组件,所述安装板组件包括上安装板、舵轮安装板及下安装板,分别加工有防呆设计的缺口,保证缺口相对位置,更加方便安装;转向齿轮以轴向竖直回转方式固定于舵轮安装板上;所述舵轮安装板的上、下两侧分别为所述上安装板和所述下安装板;上安装板与下安装板之间固定导向轴以实现等间距固定;所述导向轴同时穿过所述舵轮安装板上的圆法兰无油衬套内;所述下安装板上设置有用于允许舵轮组件穿过的贯穿孔;所述上安装板与舵轮安装板之间的导向轴上套装弹簧。
3.根据权利要求1所述的一种舵轮AGV移动平台,其特征在于:还包括抽拉式的电控箱组件;电控箱组件包括封闭的电控箱体,所述电控箱体放置于敞口的托板内;所述托板的底壁上安装有滚轮条;所述滚轮条压在电控箱体的底板边缘的上表面,抽拉过程中滚轮条滚动;所述托板上设置有长条垫片位于所述电控箱体的底板下表面,抽拉过程中两者相对滑动;所述托板内还安装有加工有斜面的后挡块;所述后挡块位于抽拉行程末端,通过斜面顶紧所述电控箱体的底板;所述底板外侧安装有用于固定电控箱体位置的螺栓;所述电控箱体的前侧板上还设有拉手及用于插接插头的插拔孔。
4.根据权利要求1或2或3所述的一种舵轮AGV移动平台,其特征在于:还包括电池组件;所述电池组件通过线缆连接所述充电组件。
5.根据权利要求4所述的一种舵轮AGV移动平台,其特征在于:所述安全雷达设置于所述骨架焊件的骨架对角线端部。
6.根据权利要求5所述的一种舵轮AGV移动平台,其特征在于:所述骨架焊件的前后侧各设置四个所述超声波收发组件。
7.根据权利要求6所述的一种舵轮AGV移动平台,其特征在于:所述骨架焊件的每个对角位置上各设置一个急停按钮。
8.根据权利要求1或7所述的一种舵轮AGV移动平台,其特征在于:还包括控制系统;所述控制系统包括:收发信号的天线模块、传感信号收集的接收模块、导航模块、电路及电气控制的电控模块。
9.根据权利要求2所述的一种舵轮AGV移动平台,其特征在于:所述舵轮悬挂组件导向轴的上端设有用于调节弹簧压缩量的防松螺母;所述导向轴的下端设有用于防止圆法兰无油衬套碰撞下安装板的缓冲垫片;所述转向齿轮通过定位销与所述舵轮安装板进行定位,并通过螺栓联接。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201921738589.XU CN211494309U (zh) | 2019-10-17 | 2019-10-17 | 一种舵轮agv移动平台 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201921738589.XU CN211494309U (zh) | 2019-10-17 | 2019-10-17 | 一种舵轮agv移动平台 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN211494309U true CN211494309U (zh) | 2020-09-15 |
Family
ID=72406808
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201921738589.XU Active CN211494309U (zh) | 2019-10-17 | 2019-10-17 | 一种舵轮agv移动平台 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN211494309U (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110641576A (zh) * | 2019-10-17 | 2020-01-03 | 博众精工科技股份有限公司 | 一种舵轮agv移动平台 |
-
2019
- 2019-10-17 CN CN201921738589.XU patent/CN211494309U/zh active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110641576A (zh) * | 2019-10-17 | 2020-01-03 | 博众精工科技股份有限公司 | 一种舵轮agv移动平台 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110641576A (zh) | 一种舵轮agv移动平台 | |
| CN107985946B (zh) | 一种双举升agv小车 | |
| CN105565211B (zh) | 一种自动识别货物的智能搬运小车 | |
| CN204457020U (zh) | 一种agv汽车搬运器 | |
| CN103246285A (zh) | 无人行驶作业车的引导装置 | |
| CN104085313A (zh) | Agv底盘的8自由度机械臂系统 | |
| CN205272074U (zh) | 一种支撑机械臂的差速agv平台 | |
| CN209737595U (zh) | 一种可无线充电的移动式机械臂小车 | |
| CN102718043A (zh) | 背驮式agv移动搬运机器人 | |
| CN112093467A (zh) | 一种移动式搬运机器人系统及其控制方法 | |
| CN110435784B (zh) | 一种全地形移动平台及其组成的机器人 | |
| CN112811352A (zh) | 一种面向智慧物流的机器人叉车 | |
| CN212173587U (zh) | 一种重载轨道小车 | |
| CN109025439A (zh) | 一种搬运汽车的智能机器人 | |
| CN211494309U (zh) | 一种舵轮agv移动平台 | |
| CN210361286U (zh) | 一种档案管理机器人 | |
| CN214217038U (zh) | 全向潜伏牵引式agv小车 | |
| CN113110427A (zh) | 一种基于agv的主起整流罩调姿平台柔性入位装置及方法 | |
| CN116161583A (zh) | 一种履带式无人越野堆垛叉车 | |
| CN115676714A (zh) | 一种具有举升侧移功能的全向agv | |
| CN214776251U (zh) | 接力拣选agv搬运小车的驱动轮悬挂系统 | |
| CN212605547U (zh) | 物流小车 | |
| CN210761046U (zh) | 一种自动agv小车 | |
| CN210313357U (zh) | 全向潜伏式agv | |
| CN208830804U (zh) | 一种搬运汽车的智能机器人 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| TR01 | Transfer of patent right | ||
| TR01 | Transfer of patent right |
Effective date of registration: 20240710 Address after: Building 2, No. 699 Quande Road, Jiangling Street, Wujiang District, Suzhou City, Jiangsu Province 215000 Patentee after: SUZHOU LINKHOU ROBOT CO.,LTD. Country or region after: China Address before: NO.666, Huxin West Road, Wujiang Economic Development Zone, Suzhou City, Jiangsu Province Patentee before: BOZHON PRECISION INDUSTRY TECHNOLOGY Co.,Ltd. Country or region before: China |