CN210757770U - 一种护士工作协作机器人 - Google Patents
一种护士工作协作机器人 Download PDFInfo
- Publication number
- CN210757770U CN210757770U CN201921820181.7U CN201921820181U CN210757770U CN 210757770 U CN210757770 U CN 210757770U CN 201921820181 U CN201921820181 U CN 201921820181U CN 210757770 U CN210757770 U CN 210757770U
- Authority
- CN
- China
- Prior art keywords
- layer
- arm
- placing
- box
- shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Landscapes
- Manipulator (AREA)
Abstract
本实用新型属于医疗机器人技术领域,尤其涉及一种护士工作协作机器人,包括行走层、大型储物层、药品放置层和机械手,护士工作协作机器人结构为分层结构,从下往上依次为行走层、大型储物层、药品放置层,所述机械手安装在药品放置层的顶板上;护士工作协作机器人采用前后轮转向控制的方法,在转向灵活的情况下,控制简单精准,并且护士工作协作机器人储物箱采用开合式,除一端为支撑和放置电路等其他装置,其他全部为储物箱空间,把自身比较小的身躯空间的利用率达到最大,并且采用5自由度的机械手,能独立完成各种动作和各种位置物体的抓取。
Description
技术领域
本实用新型属于医疗机器人技术领域,尤其涉及一种护士协作机器人。
背景技术
近年来,常常爆发流行病毒,例如“非典”、“禽流感”等,对于这种流感病毒,最有效、最好的方法就是要先隔离,把这些流感病毒的患者隔离开来,以免造成更大的传染,但是在治疗这些患者的过程中,医护人员又不得不去接触他们,对于这种情况,护士助手能很有效地解决这个问题,护士助手能代替医护人员给患者运送药品、食物及生活用品等,给患者治疗,对病房进行消毒处理,清理垃圾等,但是现有的护士助手转弯控制不够精准,灵活,对储物箱的利用率低;护士工作协作机器人能有效解决这个问题,护士工作协作机器人采用前后轮转向控制的方法,在转向灵活的情况下,控制简单精准,并且护士工作协作机器人储物箱采用开合式,除一端为支撑和放置电路等其他装置,其他全部为储物箱空间,把自身比较小的身躯空间的利用率达到最大,并且采用5自由度的机械臂,能独立完成各种动作和各种位置物体的抓取。
实用新型内容
本实用新型的目的在于提供一种护士工作协作机器人,旨在解决现有技术中的护士助手转弯控制不够精准,灵活,对储物箱的利用率低的技术问题。
为了实现本实用新型的目的,本实用新型采用以下技术方案:
一种护士工作协作机器人,其特征在于,包括主体、机械手和设置在主体内部的控制系统,所述主体是分层结构设计,所述主体包括从下到上依次设有的行走层、大型储物层和药品放置层,所述药品放置层的放置层顶板与机械手相接。
优选的,所述行走层包括底层外壳、行走护壳、转弯电机、转弯电机齿轮和行走系统,所述行走护壳固定安装在底层外壳上;所述底层外壳上设有转弯电机,且转弯电机与行走护壳相接;转弯电机的输出轴上安装有转弯电机齿轮,转弯电机齿轮与安装在行走护壳内的行走系统的齿轮啮合,转弯电机通过齿轮驱动行走系统转弯;所述底层外壳的上端面还安装有电源控制组件;
所述行走系统包括转弯轴、转弯齿轮、转弯轴承、车轮平衡架、车轮轴轴承、车轮轴、车轮、车轮轴齿轮、行走电机齿轮和行走电机;所述转弯轴通过转弯轴承安装在车轮平衡架上,所述车轮平衡架安装在行走护壳内,所述转弯齿轮安装在转弯轴的最上端;所述车轮轴通过两个车轮轴轴承安装在车轮平衡架的两耳上,所述车轮轴齿轮安装在车轮轴的中间;所述行走电机安装车轮安装架上,行走电机齿轮安装在行走电机的输出轴上,与车轮轴齿轮相啮合。
优选的,所述电源控制组件包括电源层支撑杆、控制总箱、充电接头和电源,所述控制总箱、充电接头、电源均安装在底层外壳上,所述底层外壳的下端面上还设有电源层支撑杆。
优选的,所述大型储物层包括储物层壳板、储物层支撑杆、第一储物盒、第二储物盒和盒子开关,所述储物层壳板的底板安装在行走护壳上,所述第一储物盒、第二储物盒分别安装在储物层壳板的两侧边的销轴上,第一储物盒和第二储物盒可以绕着者销轴转动,所述盒子开关控制第一储物盒、第二储物盒的打开与闭合,所述储物层支撑杆安装在储物层壳板,第一储物盒、第二储物盒闭合时的尾端上。
优选的,所述所述盒子开关包括开关电机、连杆、支撑导向件、导向轨,所述开关电机分别安装在每层的壳板底板和安装板上,所述连杆长的一端连接在开关电机的转动轴上,另一端通过支撑导向件安装在导向轨上,支撑导向件能相对导向轨滑动。
优选的,所述药品放置层包括放置层壳板、安装板、放置层支撑杆、放置层顶板,所述放置层壳板的底板安装在大型储物层的壳板上,所述安装板安装在放置层壳上设有的板销轴上方,用于安装盒子开关;放置层顶板安装上放置层壳板的顶面上;所述放置层支撑杆安装在放置层壳板上,且位于储物层支撑杆的上方。
优选的,所述药品放置层还包括方形放置盒、方形块、圆孔放置盒、圆孔板、空放置盒、试剂放置盒和试剂管夹,所述方形放置盒、圆孔放置盒、空放置盒、试剂放置盒均安装在放置层壳板的销轴上,所述方形块放置在方形放置盒中用于放置盒装式药品,圆孔板放置在圆孔放置盒用放置式瓶装式药品,试剂管夹放置在试剂放置盒内用于装夹试管类药品。
优选的,所述机械手包括机械手臂和机械手抓,所述机械手抓与机械手臂的一端连接,机械手臂的另一端安装在药品放置层的放置层顶板上;所述机械手臂包括旋转电机安装板、旋转台、旋转轴承、手臂旋转电机、旋转轴和旋转臂,所述旋转电机安装板和旋转台均安装在药品放置层的放置层顶板的底面上,所述旋转臂通过旋转轴承安装在旋转台上;所述手臂旋转电机安装在旋转电机安装板上,且输出轴与旋转轴连接,旋转臂通过旋转轴与旋转轴连接。
优选的,所述机械手臂还包括第一俯仰臂、第二俯仰臂、第三侧摆臂、第四俯仰臂、第五侧摆臂、摆动轴、关节驱动,所述第一俯仰臂的大端通过摆动轴连接在旋转臂的两耳上,第二俯仰臂的大端通过摆动轴连接在旋转臂的小端上,第三侧摆臂的大端通过摆动轴连接在第二俯仰臂的小端上,第四俯仰臂的大端通过摆动轴连接在第三侧摆臂的小端上,第五侧摆臂的连接段通过摆动轴连接在第四俯仰臂的小端上,每一个臂有一个自由度,每一个自由度由关节驱动控制。
优选的,所述机械手抓包括圆夹块、螺杆、控制块、控制杆和平行夹子,所述圆夹块安装在机械手臂的第三摆动臂小端的圆孔上,所述平行夹子的固定端安装在圆夹块上,螺杆一端连接设置在机械手臂内的电机的输出轴,控制螺杆的转动,螺杆的另一端穿过圆夹块且与控制块中心套在螺杆上,控制块中心的四周通过四条控制杆与平行夹子连接,控制夹子的开合。
本实用新型的有益效果在于:本实用新型的护士工作协作机器人,在工作时,机器人在系统的控制下,会携带药物,食物进储物盒子了,到达病房门前,自动门自动打开,护士工作协作机器人通过控制两个行走系统的转动电机,让前后轮转反向转动,这样可以达到较小的转弯半径,快速拐弯进去病房,到达病床前,根据系统的命令,打开储物盒,通过调整机械手臂,使机械手抓到达指定的位置,夹取相关试剂,夹取完成后,试剂放置盒关闭,再打开圆孔放置盒夹取瓶装药品,圆孔放置盒关闭,再打开方形放置盒夹取盒装药品,如果还有其他药品,继续打开其他储物盒,知道全部药品拿完后全部关闭,然后离开病房,然后自身进行消毒。
附图说明
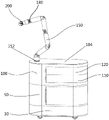
图1为本实用新型实施例提供的护士工作协作机器人的总体结构示意图;
图2为本实用新型实施例提供的护士工作协作机器人的总体结构盒子展开示意图;
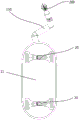
图3为本实用新型实施例提供的护士工作协作机器人的底面视图;
图4为本实用新型实施例提供的护士工作协作机器人的行走层结构示意图;
图5为本实用新型实施例提供的护士工作协作机器人的行走系统结构示意图;
图6为本实用新型实施例提供的护士工作协作机器人的盒子开关具体结构示意图;
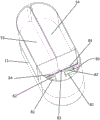
图7为本实用新型实施例提供的护士工作协作机器人的机械手臂结构示意图;
图8为本实用新型实施例提供的护士工作协作机器人的机械手臂的关节驱动结构示意图;
图9为本实用新型实施例提供的护士工作协作机器人的机械抓手结构示意图;
其中,图中各附图标记:
10—行走层 11—底层外壳 12—行走护壳
13—转弯电机 14—转弯电机齿轮 20—行走系统
21—转弯轴 22—转弯齿轮 23—转弯轴承
24—车轮平衡架 25—车轮轴轴承 26—车轮轴
27—车轮 28—车轮轴齿轮 29—行走电机齿轮
30—行走电机 50—大型储物层 51—储物层壳板
52—储物层支撑杆 53—第一储物盒 54—第二储物盒
80—盒子开关 81—开关电机 82—连杆
83—支撑导向件 84—导向轨 100—药品放置层
101—放置层壳板 102—安装板 103—放置层支撑杆
104—放置层顶板 110—放置盒 111—方形放置盒
112—方形块 113—圆孔放置盒 114—圆孔板
120—放置盒 121—空放置盒 122—试剂放置盒
123—试剂管夹 150—机械手臂 151—旋转电机安装板
152—旋转台 153—旋转轴承 154—手臂旋转电机
155—旋转轴 161—旋转臂 162—第一俯仰臂
163—第二俯仰臂 164—第三侧摆臂 165—第四俯仰臂
166—第五侧摆臂 180—关节驱动 181—摆动轴
182—大齿轮 183—小齿轮 184—摆动电机
200—机械手抓 201—圆夹块 202—螺杆
203—控制块 204—控制杆 210—平行夹子
具体实施方式
为了便于理解本实用新型,下面将参照相关附图对本实用新型进行更全面的描述。附图中给出了本实用新型的较佳实施方式。但是,本实用新型可以以许多不同的形式来实现,并不限于本文所描述的实施方式。相反地,提供这些实施方式的目的是使对本实用新型的公开内容理解的更加透彻全面。
需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。相反,当元件被称作“直接在”另一元件“上”时,不存在中间元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式,本文所使用的术语“上端”、“下端”、“左侧”、“右侧”、“前端”、“后端”以及类似的表达是参考附图的位置关系。
除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本实用新型。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
如图1~9所示,本实用新型实施例提供了一种护士工作协作机器人,包括行走层10、大型储物层50、药品放置层100、机械手(包括机械手臂150和机械手抓200),护士工作协作机器人结构为分层结构,从下往上依次为行走层10、大型储物层50、药品放置层100,所述机械手臂150安装在药品放置层100的顶板上。
具体地,本实用新型实施例的护士工作协作机器人,在工作时,机器人在系统的控制下,会携带药物,食物进储物盒子了,到达病房门前,自动门自动打开,护士工作协作机器人通过控制两个行走系统20的转动电机,让前后轮转反向转动,这样可以达到较小的转弯半径,快速拐弯进去病房,到达病床前,根据系统的命令,打开储物盒,通过调整机械手臂150,使机械手抓200到达指定的位置,夹取相关试剂,夹取完成后,试剂放置盒122关闭,再打开圆孔放置盒113夹取瓶装药品,圆孔放置盒113关闭,再打开方形放置盒111夹取盒装药品,如果还有其他药品,继续打开其他储物盒,直到全部药品拿完后全部关闭,然后离开病房,然后自身进行消毒。
本实施例中,如图1~4所示,所述行走层10包括行走护壳11、行走护壳12、转弯电机13、转弯电机齿轮14、行走系统20,所述行走护壳12固定在前后两个半圆的圆心上,所述转弯电机13安装在行走护壳11的底板和行走护壳12的边上,转弯电机齿轮14安装在转弯电机13的输出轴上,所述行走系统20安装在行走护壳12的里面,齿轮在外面,与上述转弯电机齿轮14相啮合;控制电路板与电源等也放置在这一层的中间空位上。
本实施例中,如图3~5所示,所述行走系统20包括转弯轴21、转弯齿轮22、转弯轴承23、车轮27电机安装架、车轮平衡架24、车轮轴26、车轮27、车轮轴齿轮28、行走电机30齿轮29、行走电机30,所述转弯轴21通过转弯轴承23安装在上述行走护壳12上,最下端安装在车轮平衡架24上,所述转弯齿轮22安装在转弯轴21的最上端;所述车轮轴26通过两个车轮轴轴承25安装在车轮平衡架24的两耳上,所述车轮轴齿轮28安装在车轮轴26的中间,所述行走电机30安装车轮27安装架上,行走电机30齿轮29安装在行走电机30的输出轴上,与车轮轴齿轮28相啮合。
本实施例中,如图6所示,所述盒子开关80包括开关电机81、连杆82、支撑导向件83、导向轨84,所述开关电机81分别安装在每层的壳板底板和安装板102上,所述连杆82长的一端连接在开关电机81的转动轴上,另一端通过支撑导向件83安装在导向轨84上,支撑导向件83能相对导向轨84滑动。
本实施例中,如图2和图6所示,所述大型储物层50包括储物层壳板51、储物层支撑杆52、第一储物盒53、第二储物盒54、盒子开关80,所述储物层壳板51的底板安装在上述行走护壳11上,所述第一储物盒53、第二储物盒54安装在储物层壳板51的两侧边的销轴上,可以绕着者销轴转动,所述盒子开关80控制第一储物盒53、第二储物盒54的打开与闭合,所述储物层支撑杆52安装在储物层壳板51,第一储物盒53、第二储物盒54闭合时的尾端上。
本实施例中,如图2所示,所述药品放置层100包括放置层壳板101、安装板102、放置层支撑杆103、放置层顶板104,所述放置层壳板101的底板安装在上述储物层壳板51上,所述安装板102安装上放置层壳板101销轴上方,用于安装盒子开关80;放置层顶板104安装上放置层壳板101的顶面上,所述放置层支撑杆103安装在放置层壳板101上,位于储物层支撑杆52的上方。
本实施例中,如图2所示,所述药品放置层100还包括方形放置盒111、方形块112、圆孔放置盒113、圆孔板114、空放置盒121、试剂放置盒122、试剂管夹123,所述方形放置盒111、圆孔放置盒113、空放置盒121、试剂放置盒122均与上述储物盒一样安装在放置层壳板101的销轴上,所述方形块112放置在方形放置盒111中用于放置盒装式药品,圆孔板114放置在圆孔放置盒113用放置式瓶装式药品,试剂管夹123放置在试剂放置盒122用于装夹试管类药品。
本实施例中,如图1~3所示,所述机械手臂150包括旋转电机安装板151、旋转台152、旋转轴承153、手臂旋转电机154、旋转轴155、旋转臂161,所述旋转电机安装板151、旋转台152安装在上述放置层顶板104的底面上,所述旋转臂161通过旋转轴承153安装在旋转台152上,所述手臂旋转电机154安装在旋转电机安装板151上,输出轴与旋转轴155连接,旋转臂161与旋转轴155连接。
本实施例中,如图7所示,所述机械手臂150还包括第一俯仰臂162、第二俯仰臂163、第三侧摆臂164、第四俯仰臂165、第五侧摆臂166、摆动轴181、关节驱动180,所述第一俯仰臂162的大端通过摆动轴181连接在旋转臂161的两耳上,第二俯仰臂163的大端通过摆动轴181连接在旋转臂161的小端上,第三侧摆臂164的大端通过摆动轴181连接在第二俯仰臂163的小端上,第四俯仰臂165的大端通过摆动轴181连接在第三侧摆臂164的小端上,第五侧摆臂166的连接段通过摆动轴181连接在第四俯仰臂165的小端上,每一个臂有一个自由度,每一个自由度有关节驱动180控制。
本实施例中,如图7和图8所示,所述关节驱动180包括摆动轴181、大齿轮182、小齿轮183、摆动电机184,所述大齿轮182、小齿轮183分别安装在摆动轴181和摆动电机184上,两个齿轮在同一个平面,并互相啮合,所述摆动电机184安装在每个对应的摆臂上。由电机带动大齿轮182的转动来驱动每一个关节的自由度。
本实施例中,如图9所示,所述机械手抓200包括圆夹块201、螺杆202、控制块203、控制杆204、平行夹子210,所述圆夹块201安装在上述第三摆动臂小端的圆孔上,所述平行夹子210的固定端安装在圆夹块201,螺杆202一端连接一个电机,控制螺杆202的转动,所述控制块203中心套在螺杆202上,四周通过四条控制杆204与平行夹子210连接,控制夹子的开合。
以上实施方式仅用于说明本实用新型,而并非对本实用新型的限制,有关技术领域的普通技术人员,在不脱离本实用新型的精神和范围的情况下,还可以做出各种变化和变型,因此所有等同的技术方案也属于本实用新型的范畴,本实用新型的专利保护范围应由权利要求限定。
Claims (10)
1.一种护士工作协作机器人,其特征在于,包括主体、机械手和设置在主体内部的控制系统,所述主体是分层结构设计,所述主体包括从下到上依次设有的行走层、大型储物层和药品放置层,所述药品放置层的放置层顶板与机械手相接。
2.根据权利要求1所述的一种护士工作协作机器人,其特征在于,所述行走层包括底层外壳、行走护壳、转弯电机、转弯电机齿轮和行走系统,所述行走护壳固定安装在底层外壳上;所述底层外壳上设有转弯电机,且转弯电机与行走护壳相接;转弯电机的输出轴上安装有转弯电机齿轮,转弯电机齿轮与安装在行走护壳内的行走系统的齿轮啮合,转弯电机通过齿轮驱动行走系统转弯;所述底层外壳的上端面还安装有电源控制组件;
所述行走系统包括转弯轴、转弯齿轮、转弯轴承、车轮平衡架、车轮轴轴承、车轮轴、车轮、车轮轴齿轮、行走电机齿轮和行走电机;所述转弯轴通过转弯轴承安装在车轮平衡架上,所述车轮平衡架安装在行走护壳内,所述转弯齿轮安装在转弯轴的最上端;所述车轮轴通过两个车轮轴轴承安装在车轮平衡架的两耳上,所述车轮轴齿轮安装在车轮轴的中间;所述行走电机安装车轮安装架上,行走电机齿轮安装在行走电机的输出轴上,与车轮轴齿轮相啮合。
3.根据权利要求2所述的一种护士工作协作机器人,其特征在于,所述电源控制组件包括电源层支撑杆、控制总箱、充电接头和电源,所述控制总箱、充电接头、电源均安装在底层外壳上,所述底层外壳的下端面上还设有电源层支撑杆。
4.根据权利要求1所述的一种护士工作协作机器人,其特征在于,所述大型储物层包括储物层壳板、储物层支撑杆、第一储物盒、第二储物盒和盒子开关,所述储物层壳板的底板安装在行走护壳上,所述第一储物盒、第二储物盒分别安装在储物层壳板的两侧边的销轴上,第一储物盒和第二储物盒可以绕着者销轴转动,所述盒子开关控制第一储物盒、第二储物盒的打开与闭合,所述储物层支撑杆安装在储物层壳板,第一储物盒、第二储物盒闭合时的尾端上。
5.根据权利要求4所述的一种护士工作协作机器人,其特征在于,所述盒子开关包括开关电机、连杆、支撑导向件、导向轨,所述开关电机分别安装在每层的壳板底板和安装板上,所述连杆长的一端连接在开关电机的转动轴上,另一端通过支撑导向件安装在导向轨上,支撑导向件能相对导向轨滑动。
6.根据权利要求1所述的一种护士工作协作机器人,其特征在于,所述药品放置层包括放置层壳板、安装板、放置层支撑杆、放置层顶板,所述放置层壳板的底板安装在大型储物层的壳板上,所述安装板安装在放置层壳上设有的板销轴上方,用于安装盒子开关;放置层顶板安装上放置层壳板的顶面上;所述放置层支撑杆安装在放置层壳板上,且位于储物层支撑杆的上方。
7.根据权利要求6所述的一种护士工作协作机器人,其特征在于,所述药品放置层还包括方形放置盒、方形块、圆孔放置盒、圆孔板、空放置盒、试剂放置盒和试剂管夹,所述方形放置盒、圆孔放置盒、空放置盒、试剂放置盒均安装在放置层壳板的销轴上,所述方形块放置在方形放置盒中用于放置盒装式药品,圆孔板放置在圆孔放置盒用放置式瓶装式药品,试剂管夹放置在试剂放置盒内用于装夹试管类药品。
8.根据权利要求1所述的一种护士工作协作机器人,其特征在于,所述机械手包括机械手臂和机械手抓,所述机械手抓与机械手臂的一端连接,机械手臂的另一端安装在药品放置层的放置层顶板上;所述机械手臂包括旋转电机安装板、旋转台、旋转轴承、手臂旋转电机、旋转轴和旋转臂,所述旋转电机安装板和旋转台均安装在药品放置层的放置层顶板的底面上,所述旋转臂通过旋转轴承安装在旋转台上;所述手臂旋转电机安装在旋转电机安装板上,且输出轴与旋转轴连接,旋转臂通过旋转轴与旋转轴连接。
9.根据权利要求8所述的一种护士工作协作机器人,其特征在于,所述机械手臂还包括第一俯仰臂、第二俯仰臂、第三侧摆臂、第四俯仰臂、第五侧摆臂、摆动轴、关节驱动,所述第一俯仰臂的大端通过摆动轴连接在旋转臂的两耳上,第二俯仰臂的大端通过摆动轴连接在旋转臂的小端上,第三侧摆臂的大端通过摆动轴连接在第二俯仰臂的小端上,第四俯仰臂的大端通过摆动轴连接在第三侧摆臂的小端上,第五侧摆臂的连接段通过摆动轴连接在第四俯仰臂的小端上,每一个臂有一个自由度,每一个自由度由关节驱动控制。
10.根据权利要求8所述的一种护士工作协作机器人,其特征在于,所述机械手抓包括圆夹块、螺杆、控制块、控制杆和平行夹子,所述圆夹块安装在机械手臂的第三摆动臂小端的圆孔上,所述平行夹子的固定端安装在圆夹块上,螺杆一端连接设置在机械手臂内的电机的输出轴,控制螺杆的转动,螺杆的另一端穿过圆夹块且与控制块中心套在螺杆上,控制块中心的四周通过四条控制杆与平行夹子连接,控制夹子的开合。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201921820181.7U CN210757770U (zh) | 2019-10-26 | 2019-10-26 | 一种护士工作协作机器人 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201921820181.7U CN210757770U (zh) | 2019-10-26 | 2019-10-26 | 一种护士工作协作机器人 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN210757770U true CN210757770U (zh) | 2020-06-16 |
Family
ID=71057052
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201921820181.7U Expired - Fee Related CN210757770U (zh) | 2019-10-26 | 2019-10-26 | 一种护士工作协作机器人 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN210757770U (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111956405A (zh) * | 2020-08-17 | 2020-11-20 | 辛盛琛 | 一种咽拭子采集车 |
| CN112091989A (zh) * | 2020-08-26 | 2020-12-18 | 宁波大学 | 一种医用器械护士辅助机器人 |
-
2019
- 2019-10-26 CN CN201921820181.7U patent/CN210757770U/zh not_active Expired - Fee Related
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111956405A (zh) * | 2020-08-17 | 2020-11-20 | 辛盛琛 | 一种咽拭子采集车 |
| CN112091989A (zh) * | 2020-08-26 | 2020-12-18 | 宁波大学 | 一种医用器械护士辅助机器人 |
| CN112091989B (zh) * | 2020-08-26 | 2022-02-18 | 宁波大学 | 一种医用器械护士辅助机器人 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN210757770U (zh) | 一种护士工作协作机器人 | |
| CN107877495A (zh) | 一种机器人的夹持型机械手 | |
| CN105361951A (zh) | 一种微创腹腔手术持镜机器人 | |
| CN206643944U (zh) | 一种用于夹持物料的手爪及抓手 | |
| CN208277220U (zh) | 一种五轴搬运机器人 | |
| CN102239804A (zh) | 一种自动取苗手爪机构及其取苗方法 | |
| CN110710383A (zh) | 一种香蕉采摘与吊放作业机器人 | |
| CN207726324U (zh) | 用于聚酯瓶自动化生产的机械手 | |
| CN207888682U (zh) | 一种机器人的机械手结构 | |
| CN206795846U (zh) | 一种可自动换刀的医疗机器人手臂 | |
| CN105904450A (zh) | 一种设有旋转机械手的pcb板搬运机器人 | |
| CN208645331U (zh) | 一种智能搬运机器人机械臂 | |
| CN205267465U (zh) | 一种自动化智能家居柜 | |
| CN110142750A (zh) | 一种多自由度实现多运动的机械臂及方法 | |
| CN202491239U (zh) | 双臂大气机械手 | |
| CN211430100U (zh) | 一种香蕉采摘与吊放作业机器人 | |
| CN205969029U (zh) | 一种定点移位机械手臂机构 | |
| CN204414093U (zh) | 一种基于移动平台的对称式三自由度可负载机械手 | |
| CN202622779U (zh) | 可调式器械整理架 | |
| CN109467012A (zh) | 一种防疫搬运车 | |
| CN204951153U (zh) | 一种具有交互式路径规划功能的机器人手术系统 | |
| CN207953920U (zh) | 一种机器人的手臂结构 | |
| CN216543315U (zh) | 一种自动化机器人臂 | |
| CN110926125A (zh) | 一种医学上弧口瓶用内壁干燥装置 | |
| CN206383165U (zh) | 一种调节双臂的自动机械手 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20200616 Termination date: 20201026 |