CN209901872U - Camera module cleaning equipment - Google Patents
Camera module cleaning equipment Download PDFInfo
- Publication number
- CN209901872U CN209901872U CN201920446781.5U CN201920446781U CN209901872U CN 209901872 U CN209901872 U CN 209901872U CN 201920446781 U CN201920446781 U CN 201920446781U CN 209901872 U CN209901872 U CN 209901872U
- Authority
- CN
- China
- Prior art keywords
- seat
- adjusting
- conveying
- driving
- driving device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Landscapes
- Manipulator (AREA)
Abstract
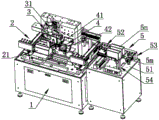
The utility model relates to the technical field of automation equipment, in particular to a camera module cleaning device, the cleaning mechanism comprises a manipulator movably arranged on a frame, a cleaning tool carrying disc, a plurality of loading positions annularly arranged on the cleaning tool carrying disc and a first driving device for driving the cleaning tool carrying disc to rotate, the frame is provided with a second driving device for driving the manipulator to turn over to be close to and away from the cleaning tool carrying disc, the feeding mechanism comprises a processing seat, a floating frame arranged on the processing seat, a sixth driving device for driving the floating frame to move up and down and an adsorption component fixedly arranged on the processing seat and used for adsorbing workpieces, the feeding mechanism completes automatic feeding, the detection mechanism completes automatic detection and identification, the cleaning mechanism completes automatic wiping and cleaning, the feeding mechanism completes automatic discharging and automatically judges and temporarily stores unqualified workpieces through the result of the detection mechanism, the whole automation degree is high, and the flexibility is strong.
Description
Technical Field
The utility model belongs to the technical field of automation equipment technique and specifically relates to indicate a camera module cleaning device.
Background
The current society is in the information age of rapid development, the mobile phone is a communication consumption product, and has become an essential product of people's daily life, with the development of technologies such as photoelectricity and precision, the mobile phone integrates multiple functions on the basis of the original communication function, typically, such as a digital photographing function, a camera of the mobile phone is a photographing device capable of photographing a static picture or a short picture on the mobile phone, and is also an additional function of the mobile phone, with the continuous development of the mobile phone industry, the camera function of the mobile phone has become one of the mobile phone performances most concerned by mobile phone users, mainly because the existing multifunctional mobile phone has the camera shooting and photographing functions, when the mobile phone users still can complete the operations of camera shooting, photographing and the like through the multifunctional mobile phone without carrying a camera.
Wherein the camera module of equipment such as cell-phone all need pass through lens surface cleaning process in process of production, but at present most factory all use artifical cleanness, and the artifical handheld piece of cloth of cleaning cleans one by one, and the camera module of this type is comparatively small-size and its lens surface part then is littleer, uses manual cleaning to be difficult to clean totally, and manual operation appears leaking easily and wipes, and the condition that inefficiency and cause the secondary to be dirty easily takes place.
Disclosure of Invention
The to-be-solved technical problem of the utility model is to provide an automatic feeding, automatic detection discernment, automatic clean, automatic ejection of compact and automatic unqualified work piece of judgement and keep in, whole degree of automation is high, the camera module cleaning device that the flexibility is strong.
In order to solve the technical problem, the utility model discloses a following technical scheme: the utility model provides a camera module cleaning device, includes the frame, installs in feeding mechanism, detection mechanism and the clean mechanism of frame, clean mechanism installs a plurality of loading position and the first drive arrangement of drive clean utensil year dish pivoted in the manipulator of frame, clean utensil year dish, annular cloth in the clean utensil year dish including the activity, the frame is installed and is driven the manipulator upset and be close to and keep away from the second drive arrangement that clean utensil carried the dish, feeding mechanism is including processing the seat, install in the floating frame of processing the seat, drive floating frame elevating movement's sixth drive arrangement and fixed mounting in processing the seat and be used for adsorbing the adsorption component of work piece.
Preferably, the loading position is an insertion hole which penetrates through the cleaning tool carrying disc, the insertion hole is clamped with a cleaning rod, and the head end of the cleaning rod is provided with a sticky part.
Preferably, the loading position is an insertion hole which penetrates through the cleaning tool carrying disc, and the cleaning tool carrying disc is detachably connected with the first driving device.
Preferably, the plurality of insertion holes are annularly arranged along the side edge of the cleaning tool carrying disc, the spacing distance between each insertion hole and the side wall of the cleaning tool carrying disc is 4-16 mm, the cleaning tool carrying disc is provided with a linkage hole in a penetrating mode, and the first driving device is provided with a linkage block inserted into the linkage hole.
Preferably, the manipulator comprises a picking claw, a third driving device for driving the picking claw to clamp or loosen and a linkage plate fixedly connected with the third driving device, and the other end of the linkage plate is fixedly connected with the second driving device.
Preferably, the second driving device is fixedly connected with a first sliding plate and a fourth driving device for driving the first sliding plate to move up and down, and the fourth driving device is fixedly connected with a second sliding plate and a fifth driving device for driving the second sliding plate to move left and right.
Preferably, the detection mechanism comprises a first image acquisition assembly arranged on the rack and used for acquiring images of the top surface of the workpiece, a second image acquisition assembly arranged on the rack and used for acquiring images of the periphery of the workpiece, at least one group of first light sources used for irradiating the periphery of the workpiece, a second light source used for irradiating the top surface of the workpiece, a first adjusting device used for adjusting the lifting of the first image acquisition assembly, a second adjusting device used for adjusting the rotation of the first image acquisition assembly, a third adjusting device used for adjusting the overturning of the first image acquisition assembly, a fourth adjusting device used for adjusting the horizontal position of the first light source, a fifth adjusting device used for adjusting the lifting of the first light source and a sixth adjusting device used for adjusting the rotation of the first light source.
Preferably, at least one group of the first light sources is arranged on one side of the first image acquisition assembly, and the second light sources are arranged below the first image acquisition assembly.
Preferably, the first adjusting device includes a slide rail fixedly mounted on the frame and a slide carriage movable on the slide rail.
Preferably, the second adjusting device comprises a rotating seat mounted on the sliding seat.
Preferably, the third adjusting device comprises an arc-shaped bottom plate arranged on the rotating seat, a turning seat which is movable on the arc-shaped bottom plate and is matched with the arc-shaped bottom plate for use, and a guide part arranged on the turning seat, wherein the cross section of the guide part is arc-shaped.
Preferably, the first image acquisition assembly comprises a camera, a locking block for fixing the camera and a locking groove formed in the locking block, and the locking block is arranged on the turnover seat.
Preferably, the fourth adjusting device is including installing in the mount pad of frame, installing in the mount pad and surrounding the circular arc seat of locating first image acquisition subassembly periphery, locating the regulation seat of circular arc seat and being used for adjusting the position control subassembly of adjusting the seat position, first light source is located adjust the seat, the position control subassembly is including seting up in a plurality of first regulation holes of circular arc seat and seting up in adjusting the seat and the second regulation hole that corresponds with partial first regulation hole, the surface mark of circular arc seat is equipped with the scale mark, adjust the seat and install the pointer that uses with the cooperation of scale mark.
Preferably, the fifth adjusting device includes a lifting rod installed on the adjusting seat and a movable block movable on the lifting rod, and the first light source is disposed on the movable block.
Preferably, the sixth adjusting device includes a fixing seat hinged to the first light source, and the fixing seat is installed on the movable block.
Preferably, the adsorption component comprises an adsorption seat arranged on the processing seat, a plurality of adsorption bosses convexly arranged on the upper side surface of the adsorption seat, a plurality of adsorption grooves arranged on the upper side surface of the adsorption bosses and an air suction hole arranged in the adsorption grooves, and the adsorption grooves are in long strip shapes.
Preferably, each adsorption groove is communicated with each other.
Preferably, the adsorption seat is provided with an air nozzle communicated with the air exhaust hole.
Preferably, the floating frame is provided with a left side plate, a right side plate and a connecting plate, wherein the two ends of the connecting plate are respectively abutted against the left side plate and the right side plate, and the left side plate and the right side plate are respectively provided with a roller.
Preferably, the right side plate is provided with a limiting groove for limiting the workpiece to move up and down.
Preferably, one end of the floating frame is connected with a first blocking block and a seventh driving device for driving the first blocking block to block or release.
Preferably, the floating frame is movably connected with a side clamping plate and an eighth driving device for driving the side clamping plate to horizontally move.
Preferably, the width of the adsorption groove is 1.5 to 6 mm.
Preferably, the processing seat is connected with a first movable base, a second movable base movably connected with the first movable base, and a twelfth driving device arranged on the second movable base and used for driving the first movable base to horizontally move, and the eleventh driving device is connected with the second movable base.
Preferably, the feeding mechanism comprises a first conveying seat arranged in parallel with the machine frame and the processing seat, a second conveying seat and a third conveying seat respectively arranged at two ends of the first conveying seat, and the machine frame is provided with a ninth driving device for driving the second conveying seat to be horizontally aligned with the first conveying seat or the processing seat, a tenth driving device for driving the third conveying seat to be horizontally aligned with the first conveying seat or the processing seat, and an eleventh driving device for driving the processing seat to be close to the second conveying seat or the third conveying seat.
Preferably, the first conveying seat, the second conveying seat and the third conveying seat are respectively provided with a plurality of third rolling conveying assemblies which are horizontally arranged.
Preferably, the third rolling conveying assembly comprises a third rolling rod, a fourth stabilizing part and a fifth stabilizing part which extend outwards from the side wall of the third rolling rod, and a third belt wheel arranged at one end of the third rolling rod, and the first conveying seat, the second conveying seat and the third conveying seat are respectively provided with a seventeenth driving device for driving the third belt wheel to rotate.
Preferably, the second conveying seat and the third conveying seat are respectively provided with a second blocking block and an eighteenth driving device for driving the second blocking block to move up and down.
Preferably, one side of frame is connected with unloading mechanism, unloading mechanism includes the mount table, installs in fourth conveying seat, fifth conveying seat, the storage seat of mount table and drives the nineteenth drive arrangement that fourth conveying seat and fifth conveying seat or storage seat level were aligned, the horizontal range of fourth conveying seat is equipped with the first conveying subassembly that rolls of a plurality of, and the horizontal range of fifth conveying seat is equipped with a plurality of second and rolls conveying subassembly.
Preferably, the fifth conveying seat and the material storage seat are arranged in parallel, the fourth conveying seat is arranged on one side face of the fifth conveying seat and one side face of the material storage seat, and the mounting table is provided with a thirteenth driving device for driving the material storage seat to lift.
Preferably, the fourth conveying seat is provided with a first supporting surface and a second supporting surface, and the plurality of first rolling conveying assemblies are horizontally arranged on the first supporting surface and the second supporting surface respectively and symmetrically arranged.
Preferably, the first rolling conveying assembly comprises a first rolling rod, a first stabilizing portion extending outwards from the side wall of the first rolling rod, and a first belt wheel arranged at the other end of the first rolling rod, and the fourth conveying seat is provided with a fourteenth driving device for driving the first belt wheel to rotate.
Preferably, one side end of the fourth conveying seat is connected with a third blocking block and a fifteenth driving device for driving the third blocking block to move up and down.
Preferably, the fifth conveying seat is provided with a third supporting surface, the plurality of second rolling conveying assemblies are arranged on the third supporting surface, each second rolling conveying assembly comprises a second rolling rod, a second stabilizing portion and a third stabilizing portion, the second stabilizing portion extends outwards from the side wall of the second rolling rod, the second belt wheel is arranged at one end of the second rolling rod, and the fifth conveying seat is provided with a sixteenth driving device for driving the second belt wheel to rotate.
Preferably, the storage seat is detachably provided with a storage box body.
The beneficial effects of the utility model reside in that: the utility model provides a camera module cleaning device, which is characterized in that automatic feeding is completed through a feeding mechanism, automatic detection and identification are completed through a detection mechanism, automatic wiping and cleaning are completed through a cleaning mechanism, automatic discharging is completed through the feeding mechanism, unqualified workpieces are automatically judged and temporarily stored through the result of the detection mechanism, in the actual cleaning process, a camera module is conveyed to the lower part of a manipulator, the manipulator moves to a cleaning tool carrying disc to grab cleaning rods arranged on the cleaning tool carrying disc, the manipulator moves upwards to pull out the cleaning rods after grabbing, a second driving device drives the manipulator to perform turnover motion to enable the head end of the cleaning rods to move downwards, then the manipulator moves downwards until the manipulator abuts against the lens surface of the camera module, the second driving device drives the manipulator to perform turnover motion again after the abutment is completed, and then the cleaning rods are inserted back to the cleaning tool carrying disc after the manipulator moves transversely and aligns with a loading position, the cleaning tool carries the dish to rotate this moment and makes the alignment of second root cleaning rod and manipulator supply it to snatch, so relapse constantly to carry out the cleanness to camera module surface, this cleaning tool carries the fine continuous grafting action that has made things convenient for the cleaning rod of the design of dish, has also made things convenient for the action design of snatching the cleaning rod simultaneously for final overall structure is compact simple and easy. And the processing seat among the feeding mechanism is equipped with the floating frame, and this floating frame can make the charging tray butt joint to adsorption component when moving down, better reach the adsorption effect to better cooperation is clean and detection work, further promotes to detect the stability of clear reliability and quality.
Drawings
Fig. 1 is a schematic perspective view of the present invention.
Fig. 2 is a schematic perspective view of the cleaning mechanism of the present invention.
Fig. 3 is the three-dimensional structure diagram of the cleaning mechanism after the frame is hidden.
Fig. 4 is an enlarged schematic view of a portion a of fig. 3.
Fig. 5 is a schematic perspective view of the middle detecting mechanism of the present invention.
Fig. 6 is an exploded view of the first image capturing assembly according to the present invention.
Fig. 7 is an exploded view of the three-dimensional structure of the middle arc seat and the adjusting seat of the present invention.
Fig. 8 is a schematic perspective view of the feeding mechanism of the present invention.
Fig. 9 is an exploded view of the three-dimensional structure of the middle processing seat and the first movable base of the present invention.
Fig. 10 is a schematic perspective view of the middle processing seat after the partial shell is hidden.
Fig. 11 is a schematic view of the three-dimensional structure of the middle processing seat after hiding part of the shell and part of the floating frame.
Fig. 12 is a schematic perspective view of the adsorption base of the present invention.
Fig. 13 is a schematic perspective view of the first conveying base of the present invention.
Fig. 14 is a schematic perspective view of a third conveying seat of the present invention.
Fig. 15 is a schematic perspective view of the middle blanking mechanism of the present invention.
Fig. 16 is a schematic perspective view of another view angle of the middle blanking mechanism of the present invention.
Fig. 17 is a schematic perspective view of another view angle of the middle blanking mechanism of the present invention.
Fig. 18 is an enlarged partial perspective view of a portion B in fig. 17.
Detailed Description
In order to facilitate the understanding of those skilled in the art, the present invention will be further described with reference to the following examples, which are not intended to limit the scope of the present invention.
As shown in fig. 1, a camera module cleaning device includes a frame 1, a feeding mechanism 2 installed in the frame 1, a detecting mechanism 3, and a cleaning mechanism 4, where the cleaning mechanism 4 includes a manipulator 41 movably installed in the frame 1, a cleaning tool carrying disc 42, a plurality of loading positions 43 annularly arranged on the cleaning tool carrying disc 42, and a first driving device 44 for driving the cleaning tool carrying disc 42 to rotate, the frame 1 is installed with a second driving device 45 for driving the manipulator 41 to turn over to be close to and far from the cleaning tool carrying disc 42, and the feeding mechanism 2 includes a processing seat 21, a floating frame 22 installed in the processing seat 21, a sixth driving device 23 for driving the floating frame 22 to move up and down, and an adsorption assembly 24 fixedly installed in the processing seat 21 and used for adsorbing a workpiece.
The camera module cleaning device of the embodiment finishes automatic feeding through the feeding mechanism 2, finishes automatic detection and identification through the detection mechanism 3, finishes automatic wiping and cleaning through the cleaning mechanism 4, finishes automatic discharging through the feeding mechanism 2, automatically judges unqualified workpieces through the result of the detection mechanism 3 and temporarily stores the unqualified workpieces, in the actual cleaning process, a camera 3a module is conveyed to the lower part of the manipulator 41, at the moment, the manipulator 41 moves to the cleaning tool carrying disc 42 to grab the cleaning rod 47 arranged on the cleaning tool carrying disc 42, the manipulator 41 moves upwards to pull out the cleaning rod 47 after grabbing is finished, the second driving device 45 drives the manipulator 41 to perform overturning motion to enable the head end of the cleaning rod 47 to face downwards, then the manipulator 41 moves downwards until the manipulator abuts against the lens surface of the camera 3a module, and the second driving device 45 drives the manipulator 41 to perform overturning motion again after abutting is finished, then after the transverse movement is aligned with the loading position 43, the cleaning rod 47 is inserted back to the cleaning tool carrying disc 42, at the moment, the cleaning tool carrying disc 42 rotates to enable the second cleaning rod 47 to be aligned with the mechanical arm 41 for being grabbed, the surface of the camera 3a module is repeatedly and continuously cleaned, the continuous inserting action of the cleaning rod 47 is facilitated due to the design of the cleaning tool carrying disc 42, meanwhile, the action design for grabbing the cleaning rod 47 is facilitated, and the final integral structure is compact and simple. And the processing seat 21 among the feeding mechanism 2 is equipped with floating frame 22, can make the charging tray butt to adsorption component 24 when this floating frame 22 moves down, better reach the adsorption efficiency to the clean and detection work of better cooperation further promotes the stability of detecting clear reliability and quality.
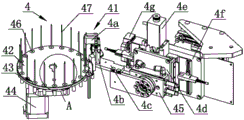
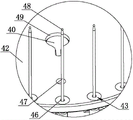
As shown in fig. 2 to 4, in this embodiment, the loading position 43 is an insertion hole 46 penetrating through the cleaning tool carrying disc 42, the cleaning tool carrying disc 42 is detachably connected to the first driving device 44, wherein the insertion hole 46 is provided with a cleaning rod 47 in a clamping manner, the head end of the cleaning rod 47 is provided with an adhesion portion 48, the insertion hole 46 is designed to facilitate the robot 41 to complete pulling out and inserting back of the cleaning rod 47, the adhesion portion 48 completes surface cleaning of the camera 3a module, cleaning is completed by using adhesion, production efficiency is well controlled while cleaning effect is ensured, the cleaning tool carrying disc 42 can be used instead in actual use, and after the cleaning rods 47 on the first cleaning tool carrying disc 42 are used, the cleaning rods are detached and replaced by the second cleaning tool carrying disc 42, so as to ensure cleaning effect.
In this embodiment, a plurality of insertion holes 46 are annularly arranged along the side of the cleaning tool carrying disc 42, the distance between the insertion holes 46 and the side wall of the cleaning tool carrying disc 42 is 4 to 16 mm, the cleaning tool carrying disc 42 is provided with a linkage hole 49 in a penetrating manner, the first driving device 44 is provided with a linkage block 40 inserted in the linkage hole 49, the insertion holes 46 are annularly arranged on the outer ring of the cleaning tool carrying disc 42 to increase the installation number of the cleaning rods 47, and improve the working efficiency, and if the distance between the insertion holes 46 and the side wall of the cleaning tool carrying disc 42 is too far away, the number of the cleaning rods 47 installed on the cleaning tool carrying disc 42 can be greatly reduced, so that the difficulty is added to the grabbing of the manipulator 41 while the working efficiency is reduced, the phone manipulator 41 in the inner part of the installation of the cleaning rods 47 needs to be designed to be extended to complete grabbing and inserting, and the distance is designed to be too close, the edge of the cleaning tool carrying disc 42 is easily damaged by fatigue in the continuous insertion and extraction process of the cleaning rods 47, the interval design of 4-16 mm well ensures the number of the cleaning rods 47 and the convenient grabbing of the manipulator 41, and well controls the service life of the cleaning tool carrying disc 42, the practicability is high, the first driving device 44 is provided with the linkage block 40 inserted in the linkage hole 49, and the cleaning tool carrying disc 42 and the first driving device 44 can be simply and reliably disassembled or assembled by using the structure that the linkage hole 49 is matched with the linkage block 40.
In this embodiment, the manipulator 41 includes a picking claw 4a, a third driving device 4b for driving the picking claw 4a to clamp or loosen, and a linkage plate 4c fixedly connected to the third driving device 4b, the other end of the linkage plate 4c is fixedly connected to a second driving device 45, the third driving device 4b can be set as an air cylinder, the clamping or loosening reliability of the picking claw 4a driven by the air cylinder is high, the second driving device 45 can be set as a rotary air cylinder, and the turning effect achieved by the rotary air cylinder is good and the reliability is high.
In this embodiment, the second driving device 45 is fixedly connected with a first sliding plate 4d and a fourth driving device 4e for driving the first sliding plate 4d to move up and down, the fourth driving device 4e is fixedly connected with a second sliding plate 4f and a fifth driving device 4g for driving the second sliding plate 4f to move left and right, the fourth driving device 4e and the fifth driving device 4g can be set as motors, the motors drive the screws to drive the first sliding plate 4d and the second sliding plate 4f to move with accuracy, the manipulator 41 moves transversely to make the cleaning rod 47 enter the picking claw 4a before picking, the manipulator 41 moves upwards to pull out the cleaning rod 47 after picking and then turns over, the manipulator 41 drives the cleaning rod 47 to move downwards to abut against the cleaning rod after turning over, and then turns back again after turning over, and high-accuracy transverse and longitudinal motions are used, better completion is clean and snatch to cleaning rod 47, reaches high efficiency and high-quality completion and cleans the butt of camera 3a module.
As shown in fig. 5 to 7, in the present embodiment, the detection mechanism 3 includes a first image capturing assembly 31 disposed on the frame 1 and used for capturing images of the top surface of the workpiece, a second image capturing assembly 32 disposed on the frame 1 and used for capturing images of the periphery of the workpiece, at least one set of first light sources 33 used for illuminating the periphery of the workpiece, a second light source 34 used for illuminating the top surface of the workpiece, a first adjusting device used for adjusting the vertical position of the first image capturing assembly 31, a second adjusting device used for adjusting the rotation of the first image capturing assembly 31, a third adjusting device used for adjusting the inversion of the first image capturing assembly 31, a fourth adjusting device used for adjusting the horizontal position of the first light source 33, a fifth adjusting device used for adjusting the vertical position of the first light source 33, and a sixth adjusting device used for adjusting the rotation of the first light source 33, and the first adjusting device is used for adjusting the vertical position of the first light source 33, and the second adjusting, The second adjusting device and the third adjusting device respectively perform lifting, rotating and overturning adjustment on the first image acquisition assembly 31, and the fourth adjusting device, the fifth adjusting device and the sixth adjusting device respectively perform horizontal, lifting and rotating adjustment on the first light source 33, so that the multi-directional adjustment of the first image acquisition assembly 31 and the first light source 33 is realized, and image acquisition can be performed on each region of a workpiece respectively, thereby providing a complete and comprehensive judgment basis for detection of the workpiece, simultaneously meeting different production requirements and having wide applicability; the light supplement is irradiated to the side surface of the workpiece through the first light source 33, and the light supplement is irradiated to the top surface of the workpiece through the second light source 34, so that each area in the workpiece image acquired by the first image acquisition assembly 31 is clear and visible, and the brightness is uniform; the first image acquisition component 31 and the second image acquisition component 32 are used for respectively acquiring images of the top surface and the periphery of the workpiece, so that the detection efficiency of the workpiece is effectively improved.
In this embodiment, at least one set of the first light sources 33 is disposed on one side of the first image capturing assembly 31, and the second light sources 34 is disposed below the first image capturing assembly 31, so as to ensure uniformity of illumination brightness of the first light sources 33 and the second light sources 34 on the top surface and the periphery of the workpiece, thereby ensuring subsequent detection accuracy of the workpiece.
In this embodiment, the first adjusting device includes a slide rail 35 fixedly mounted on the frame 1 and a slide seat 36 movably mounted on the slide rail 35, and during adjustment, the first image capturing assembly 31 is lifted and lowered by sliding the slide seat 36 on the slide rail 35, so that the transmission stability is high, and meanwhile, the slide seat 36 is driven to slide by air driving, manual driving, motor driving, and the like.
In this embodiment, the second adjusting device includes a rotating seat 37 installed on the sliding seat 36, and during adjustment, the first image capturing assembly 31 is rotated by the rotation of the rotating seat 37, so that the transmission stability is high, and meanwhile, the rotating seat 37 is driven to rotate by air driving, manual driving, motor driving, and the like.
In this embodiment, the third adjusting device includes the arc bottom plate 38 installed on the rotating seat 37, the turning seat 39 which is movable on the arc bottom plate 38 and used in cooperation with the arc bottom plate 38, and the guiding portion 30 provided on the turning seat 39, the sectional shape of the guiding portion 30 is arc-shaped, during adjustment, the turning seat 39 is movable on the arc bottom plate 38, and the turning seat 39 is turned over through the guiding portion 30, at this time, because the sectional shape of the guiding portion 30 is arc-shaped, the turning seat 39 is moved along the arc-shaped surface of the guiding portion 30, so that the turning of the turning seat 39 is realized, that the first image acquisition assembly 31 is turned over is realized, and the mode of driving the turning seat 3924 to move can adopt modes such as air driving, manual driving, and motor driving.
In this embodiment, first image acquisition subassembly 31 includes camera 3a, is used for fixed camera 3 a's latch segment 3b and sets up in latch segment 3 b's locking groove 3c, latch segment 3b is installed in upset seat 39, and in practical application, according to the position that production demand removed camera 3a, the back is accomplished in the regulation, fixes camera 3 a's position through locking groove 3c and screw cooperation to the completion is to the regulation of camera 3a position, extensive applicability.
In this embodiment, the fourth adjusting device includes a mounting seat 3d installed on the frame 1, an arc seat 3e installed on the mounting seat 3d and surrounding the periphery of the first image capturing assembly 31, an adjusting seat 3f installed on the arc seat 3e, and a position adjusting assembly for adjusting the position of the adjusting seat 3f, the first light source 33 is installed on the adjusting seat 3f, the position adjusting assembly includes a plurality of first adjusting holes 3g opened on the arc seat 3e and second adjusting holes 3h opened on the adjusting seat 3f and corresponding to a portion of the first adjusting holes 3g, the surface of the arc seat 3e is marked with a scale mark 3i, the adjusting seat 3f is installed with a pointer 3j used in cooperation with the scale mark 3i, the arc seat 3e is installed on the periphery of the first image capturing assembly 31, the first light source 33 adjusts the arc position on the arc seat 3e through the position adjusting assembly, in order to satisfy different production demands, extensive applicability, in practical application, adjust the position of adjusting seat 3f according to the production demand, thereby pass first regulation hole 3g and second regulation hole 3h through the screw after the regulation is accomplished and fix the position of adjusting seat 3f, and then accomplish the regulation to first light source 33 horizontal position, in practical application, when adjusting the position of adjusting seat 3f, the position of pointer 3j can remove thereupon, and when the target scale mark 3i on the directional arc seat 3e of pointer 3j, the position control to adjusting seat 3f has been accomplished promptly this moment, use through the cooperation of scale mark 3i and pointer 3j, be used for guaranteeing the accuracy nature of adjusting the position control of seat 3f, thereby guarantee the accuracy nature of work piece detection.
In this embodiment, fifth adjusting device is including installing in the lifter 3k of adjusting seat 3f and moving about in the movable block 3m of lifter 3k, movable block 3m is located to first light source 33, during the regulation, has realized the lift removal of first light source 33 through the slip of movable block 3m on lifter 3k, and transmission stability is strong, and the gliding mode of drive movable block 3m can adopt modes such as air drive, manual drive, motor drive simultaneously, also can set up scale mark 3i on the lifter 3k seat in addition to improve the accuracy nature of first light source 33 elevating position, the practicality is strong.
In this embodiment, the sixth adjusting device includes the fixing base 3n articulated with first light source 33, fixing base 3n is installed in movable block 3m, during the regulation, can accomplish the rotation regulation to first light source 33 through rotatory fixing base 3n, and transmission stability is strong, and the mode that drives fixing base 3n simultaneously and rotate can adopt modes such as air drive, manual drive, motor drive, also can set up scale mark 3i on fixing base 3n in addition to improve the accuracy nature of first light source 33 rotational position, the practicality is strong.
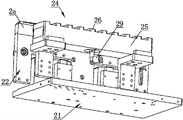
As shown in fig. 10 to 13, in the embodiment, the adsorption assembly 24 includes an adsorption seat 25 installed on the processing seat 21, a plurality of adsorption bosses 26 protruding from the upper side of the adsorption seat 25, a plurality of adsorption grooves 27 opened on the upper side of the adsorption bosses 26, and air suction holes 28 opened on the adsorption grooves 27, the adsorption grooves 27 are in a long strip shape, the adsorption grooves 27 adopt a long strip shape structure design to replace a traditional circular structure design, so that a transverse adsorption area for the soft workpiece is increased, meanwhile, the long strip adsorption grooves 27 are in a long and thin structure, so as to avoid a phenomenon that the soft workpiece is sunk when adsorbing the soft workpiece, and in addition, the adsorption seat 25 is provided with a plurality of adsorption grooves 27, so as to improve adsorption stability for the workpiece, thereby ensuring processing precision of the workpiece. When in work, the air around the adsorption groove 27 is sucked through the suction holes 28, the vacuum adsorption to the soft workpiece is realized, the adsorption groove 27 is designed in a strip shape, so that the phenomenon that the middle part of the workpiece is sunken when the soft workpiece is adsorbed is avoided, meanwhile, a plurality of adsorption grooves 27 are arranged on the adsorption boss 26 to improve the adsorption stability to the soft workpiece, thereby ensuring the processing precision of the soft workpiece, after the processing is finished, the adsorption groove 27 adopts the strip-shaped structural design to replace the traditional round structural design, thus increasing the transverse adsorption area of the soft workpiece, meanwhile, the structure of the strip-shaped adsorption groove 27 is slender, so that the phenomenon that the soft workpiece is sunken when the soft workpiece is adsorbed is avoided, and in addition, the adsorption seat 25 is provided with the plurality of adsorption grooves 27, so that the adsorption stability of the workpiece is improved, and the machining precision of the workpiece is ensured.
In this embodiment, each communicate each other between the adsorption tank 27, and long banding adsorption tank 27 adsorption area is big, effectively improves adsorption tank 27 and adsorbs the steadiness to the work piece, and communicates each other between each adsorption tank 27 of locating absorption boss 26, only needs to set up a small number of aspirating holes 28 like this and can realize that the preferred aspirating hole 28 of air bleed effect is three in practical application, and the further area of contact that has increased work piece and adsorption tank 27 of such structural design simultaneously, further improvement the absorption steadiness of work piece and adsorption tank 27.
In this embodiment, the floating frame 22 is provided with a left side plate 20, a right side plate 2a and a connecting plate 2b, two ends of the connecting plate 2b are respectively abutted to the left side plate 20 and the right side plate 2a, the left side plate 20 and the right side plate 2a are respectively provided with a roller 2c, in practical application, a material tray is moved on the floating frame 22 through rotation of the rollers 2c, and when a workpiece is moved to a target position, the sixth driving device 23 starts to drive the left side plate 20, the right side plate 2a and the connecting plate 2b to integrally move downwards, so that the material tray is attached to the adsorption assembly 24.
In this embodiment, the right side plate 2a is provided with a limiting groove 2d for limiting the up-and-down movement of the workpiece, and when the tray enters the floating frame 22, the side wall of the tray is clamped in the limiting groove 2d, so as to ensure the subsequent conveying precision of the workpiece, and avoid the phenomenon that the tray is dislocated or moved out of the feeding device in the conveying process.
In this embodiment, one end of the floating frame 22 is connected with a first blocking block 2e and a seventh driving device 2f for driving the first blocking block 2e to block or release, when the tray moves to the target position, the seventh driving device 2f drives the blocking block to block the workpiece from moving continuously, and the practicability is strong.
In this embodiment, the floating frame 22 is movably connected with a side clamping plate 2g and an eighth driving device 2h for driving the side clamping plate 2g to move horizontally, and the forward pushing of the side clamping plate 2g clamps the material tray for further fixing, so as to improve the processing reliability and quality.
In this embodiment, the suction base 25 is provided with an air nozzle 29 communicated with the suction hole 28. In practical application, the air nozzle 29 is communicated with an external air suction device through an air pipe, and air around the adsorption groove 27 is sucked out of the air suction hole 28 through the air suction device, so that vacuum adsorption of the workpiece is realized.
In this embodiment, the width of the adsorption groove 27 is 1.5 to 6mm, preferably, the width of the adsorption groove 27 is 3mm, so that the phenomenon that the middle of the workpiece is sunken when the soft workpiece is adsorbed is more effectively avoided, and the processing precision of the soft workpiece is further improved.
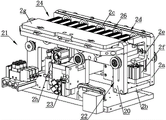
As shown in fig. 9, in this embodiment, the processing base 21 is connected to a first movable base 2i, a second movable base 2j movably connected to the first movable base 2i, and a twelfth driving device 2k installed on the second movable base 2j and driving the first movable base 2i to move horizontally, the eleventh driving device 2m is connected to the second movable base 2j, the first movable base 2i and the second movable base 2j are disposed so as to control horizontal, transverse and longitudinal movement of the processing base 21, and further cooperate with the first conveying base 2n and the second conveying base 2o to improve flexibility and reliability.
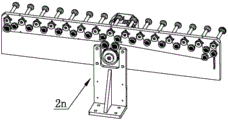
As shown in fig. 8, in this embodiment, the feeding mechanism 2 includes a first conveying seat 2n installed on the rack 1 and the processing seat 21 in parallel, a second conveying seat 2o and a third conveying seat 2p respectively installed at two ends of the first conveying seat 2n, the rack 1 is provided with a ninth driving device 2q for driving the second conveying seat 2o to be horizontally aligned with the first conveying seat 2n or the processing seat 21, a tenth driving device 2r for driving the third conveying seat 2p to be horizontally aligned with the first conveying seat 2n or the processing seat 21, and an eleventh driving device 2m for driving the processing seat 21 to be close to the second conveying seat 2o or the third conveying seat 2p, the material tray can come in from the side of the rack 1, the second conveying seat 2o can be horizontally and flexibly aligned, after the material tray enters the second conveying seat 2o, it is determined whether the material tray is butted with the processing seat 21 or the first feeding seat according to an instruction, the trend of the charging tray is flexibly controlled, workpieces in the charging tray which does not need to be processed and detected are directly sent out, the third conveying seat 2p is also flexibly matched with the first conveying seat 2n, and the charging tray which does not need to be processed and detected is quickly sent out by aligning with the third conveying seat 2p, so that useless work is reduced, and the working efficiency is effectively improved.
In this embodiment, the first transfer seat 2n, the second transfer seat 2o, and the third transfer seat 2p are respectively provided with a plurality of third rolling conveying assemblies 2s arranged horizontally, and the tray can be conveyed forwards quickly and stably by the rotation of the third rolling conveying assemblies 2s, so that the practicability is high.
As shown in fig. 14, in this embodiment, the third rolling conveying assembly 2s includes a third rolling rod 2t, a fourth stabilizing portion 2u and a fifth stabilizing portion 2v extending outward from a side wall of the third rolling rod 2t, and a third pulley 2w disposed at one end of the third rolling rod 2t, the first conveying seat 2n, the second conveying seat 2o, and the third conveying seat 2p are respectively provided with a seventeenth driving device 2x for driving the third pulley 2w to rotate, and the fourth stabilizing portion 2u and the fifth stabilizing portion 2v are used for stably abutting against two side edges of a charging tray when the charging tray enters, so as to effectively prevent the charging tray from shaking violently during conveying, ensure the reliability of conveying, and the seventeenth driving device 2x can be set to have a motor driving the third pulley 2w to complete driving rotation of the rolling rod, thereby achieving efficient conveying.
In this embodiment, the second conveying seat 2o and the third conveying seat 2p are respectively provided with a second blocking block 2y and an eighteenth driving device 2z for driving the second blocking block 2y to move up and down, and the second blocking block 2y is used for preventing the tray from falling off when the tray is too close to the side edge of the other end during input, so as to further improve the reliability of transmission.
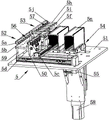
As shown in fig. 15 to 18, in this embodiment, a blanking mechanism 5 is connected to one side of the frame 1, the blanking mechanism 5 includes a mounting platform 51, a fourth conveying seat 52, a fifth conveying seat 53, a storage seat 54 and a nineteenth driving device 55 for driving the fourth conveying seat 52 to be horizontally aligned with the fifth conveying seat 53 or the storage seat 54, the fourth conveying seat 52 is horizontally arranged and provided with a plurality of first rolling conveying assemblies 56, the fifth conveying seat 53 is horizontally arranged and provided with a plurality of second rolling conveying assemblies 57, in actual operation, the blanking mechanism 5 is respectively disposed at two ends of the processing equipment, so as to complete a charging process of a material tray, and also complete a blanking process of a material tray, wherein the fourth conveying seat 52 can be flexibly moved horizontally to match feeding and discharging positions of the material tray of the processing equipment, so as to achieve flexible butt joint, when the material tray enters the fourth conveying seat 52 after the processing of the processing equipment, a plurality of material trays installed at the fourth conveying seat 52 are flexibly A third roll transport module 2s just can rotate and make the charging tray continue forward, if this charging tray has the work piece unqualified in being judged the charging tray in the processing detects, this moment first transmission seat 2n can be earlier lateral shifting and just can further transmit the charging tray after the storage seat aligns, the charging tray can be temporarily stored and treats the operation personnel further processing at the storage seat, and judge qualified charging tray then can directly dock transport to fifth transmission seat 53 on, fifth transmission seat 53 continues to be transported to next station, overall structure is simple and easy, the automation degree is high, and the flexibility is strong.
In this embodiment, the fifth conveying seat 53 and the material storage seat 54 are arranged in parallel, the fourth conveying seat 52 is located on one side of the fifth conveying seat 53 and the material storage seat 54, the mounting table 51 is provided with a thirteenth driving device 58 for driving the material storage seat 54 to ascend and descend, the second conveying seat 2o and the material storage seat 54 are arranged in parallel, the fourth conveying seat 52 can be quickly aligned with the fourth conveying seat by transverse movement, further conveying of material trays is facilitated, and the material storage seats can be lifted and lowered by a superposition mode to store more material trays.
In this embodiment, the fourth conveying seat 52 is provided with a first supporting surface 59 and a second supporting surface 50, the first rolling conveying assemblies 56 are respectively horizontally arranged and distributed on the first supporting surface 59 and the second supporting surface 50 in a symmetrical manner, and are arranged in two rows in a symmetrical manner so as to facilitate the access and the output of the charging tray, and the subsequent maintenance is facilitated.
In this embodiment, the first rolling conveying assembly 56 includes a first rolling rod 5a, a first stabilizing portion 5b extending outward from a side wall of the first rolling rod 5a, and a first belt wheel 5c disposed at the other end of the first rolling rod 5a, the fourth conveying base 52 is provided with a fourteenth driving device 5d for driving the first belt wheel 5c to rotate, the fourteenth driving device 5d drives the first belt wheel 5c to rotate through the conveyor belt, so as to control the rotating speed thereof in real time, ensure the transmission efficiency and quality, and have strong reliability.
In this embodiment, one side end of the fourth conveying seat 52 is connected with the third blocking block 5e and the fifteenth driving device 5f for driving the third blocking block 5e to move up and down, the third blocking block 5e is arranged to make the butt joint when the material tray is input stable, the material tray is firstly made to be stable on the fourth conveying seat 52, the command is transmitted to the fifth conveying seat 53 or the material storage seat 54 by driving, and then the next operation is performed, so that the structure is simple, the material tray is prevented from falling, and the practicability is strong.
In this embodiment, the fifth transfer seat 53 is provided with a third supporting surface 5g, a plurality of second rolling conveying assemblies 57 are arranged on the third supporting surface 5g, the second rolling conveying assembly 57 comprises a second rolling rod 5h, a second stabilizing part 5i extending outwards from the side wall of the second rolling rod 5h, a third stabilizing part 5j and a second belt wheel 5k arranged at one end of the second rolling rod 5h, the fifth transmission seat 53 is provided with a sixteenth driving device 5m for driving the second belt wheel 5k to rotate, the second rolling conveying component 57 realizes the transmission effect through the second rolling rod 5h, the second rolling rod 5h is in a strip shape design, the transmission reaction is slower relative to the first rolling rod 5a, but its steadiness is good, and the both sides butt second firm portion 5i and the third firm portion 5j of charging tray can not rock from left and right sides, and the charging tray can not have the risk of falling from the centre.
In this embodiment, the storage base 54 is detachably provided with a storage box body 5n, and the storage box body 5n is designed to facilitate storage of a plurality of trays and unified processing by operators.
In the description of the present invention, it should be noted that, for the orientation words, such as the terms "center", "lateral (X)", "longitudinal (Y)", "vertical (Z)", "length", "width", "thickness", "upper", "lower", "front", "rear", "left", "right", "vertical", "horizontal", "top", "bottom", "inner", "outer", "clockwise", "counterclockwise", etc., it indicates that the orientation and positional relationship are based on the orientation or positional relationship shown in the drawings, and it is only for convenience of describing the present invention and simplifying the description, but it is not intended to indicate or imply that the device or element referred to must have a specific orientation, be constructed and operated in a specific orientation, and should not be construed as limiting the specific scope of the present invention.
Furthermore, if the terms "first" and "second" are used for descriptive purposes only, they are not to be construed as indicating or implying relative importance or implicitly indicating the number of technical features. Thus, the definition of "a first" or "a second" feature may explicitly or implicitly include one or more of the features, and in the description of the invention, "a plurality" means two or more unless specifically defined otherwise.
In the present invention, unless otherwise expressly specified or limited, the terms "assembled", "connected", and "connected", if any, are to be construed broadly, e.g., as meaning fixedly connected, detachably connected, or integrally connected; or may be a mechanical connection; the two elements can be directly connected or connected through an intermediate medium, and the two elements can be communicated with each other. The specific meaning of the above terms in the present invention can be understood by those of ordinary skill in the art according to specific situations.
The above-mentioned embodiments only express a plurality of embodiments of the present invention, and the description thereof is specific and detailed, but not construed as limiting the scope of the present invention. It should be noted that, for those skilled in the art, without departing from the spirit of the present invention, several variations and modifications can be made, which are within the scope of the present invention. Therefore, the protection scope of the present invention should be subject to the appended claims.
Claims (10)
1. Camera module cleaning device, including frame (1), install in feeding mechanism (2), detection mechanism (3) and clean mechanism (4) of frame (1), its characterized in that: the cleaning mechanism (4) comprises a mechanical arm (41) movably arranged on the rack (1), a cleaning tool carrying disc (42), a plurality of loading positions (43) annularly arranged on the cleaning tool carrying disc (42) and a first driving device (44) for driving the cleaning tool carrying disc (42) to rotate, the rack (1) is provided with a second driving device (45) for driving the mechanical arm (41) to overturn to be close to and far away from the cleaning tool carrying disc (42), and the feeding mechanism (2) comprises a processing seat (21), a floating frame (22) arranged on the processing seat (21), a sixth driving device (23) for driving the floating frame (22) to move up and down and an adsorption component (24) fixedly arranged on the processing seat (21) and used for adsorbing a workpiece.
2. The camera module cleaning apparatus according to claim 1, wherein: the loading position (43) is an insertion hole (46) which penetrates through the cleaning tool carrying disc (42), and the cleaning tool carrying disc (42) is detachably connected with a first driving device (44).
3. The camera module cleaning apparatus according to claim 2, wherein: the cleaning tool carrying disc is characterized in that the inserting holes (46) are annularly arranged along the side edge of the cleaning tool carrying disc (42), the spacing distance between the inserting holes (46) and the side wall of the cleaning tool carrying disc (42) is 4-16 mm, the cleaning tool carrying disc (42) is provided with a linkage hole (49) in a penetrating mode, and the first driving device (44) is provided with a linkage block (40) inserted in the linkage hole (49).
4. The camera module cleaning apparatus according to claim 1, wherein: the detection mechanism (3) comprises a first image acquisition component (31) which is arranged on the rack (1) and is used for acquiring images of the top surface of the workpiece, a second image acquisition component (32) which is arranged on the rack (1) and is used for acquiring images of the periphery of the workpiece, at least one group of first light sources (33) which are used for irradiating the periphery of the workpiece, a second light source (34) which is used for irradiating the top surface of the workpiece, and a first adjusting device which is used for adjusting the first image acquisition component (31) in a lifting way, the second adjusting device is used for rotationally adjusting the first image acquisition assembly (31), the third adjusting device is used for overturning and adjusting the first image acquisition assembly (31), the fourth adjusting device is used for adjusting the horizontal position of the first light source (33), the fifth adjusting device is used for lifting and adjusting the first light source (33), and the sixth adjusting device is used for rotationally adjusting the first light source (33).
5. The camera module cleaning apparatus of claim 4, wherein: the fourth adjusting device comprises a mounting seat (3 d) mounted on the frame (1), an arc seat (3 e) mounted on the mounting seat (3 d) and surrounding the periphery of the first image acquisition assembly (31), an adjusting seat (3 f) arranged on the arc seat (3 e) and a position adjusting assembly used for adjusting the position of the adjusting seat (3 f), wherein a first light source (33) is arranged on the adjusting seat (3 f), the position adjusting assembly comprises a plurality of first adjusting holes (3 g) arranged on the arc seat (3 e) and second adjusting holes (3 h) arranged on the adjusting seat (3 f) and corresponding to part of the first adjusting holes (3 g), scale marks (3 i) are marked on the surface of the arc seat (3 e), and a pointer (3 j) matched with the scale marks (3 i) for use is arranged on the adjusting seat (3 f).
6. The camera module cleaning apparatus according to claim 1, wherein: the adsorption component (24) comprises an adsorption seat (25) arranged on the processing seat (21), a plurality of adsorption bosses (26) protruding from the upper side surface of the adsorption seat (25), a plurality of adsorption grooves (27) arranged on the upper side surface of the adsorption bosses (26) and air suction holes (28) arranged in the adsorption grooves (27), and the adsorption grooves (27) are in a long strip shape.
7. The camera module cleaning apparatus according to claim 1, wherein: the feeding mechanism (2) comprises a first conveying seat (2 n) arranged in parallel on the rack (1) and the processing seat (21), a second conveying seat (2 o) and a third conveying seat (2 p) arranged at two ends of the first conveying seat (2 n) respectively, a ninth driving device (2 q) for driving the second conveying seat (2 o) to be horizontally aligned with the first conveying seat (2 n) or the processing seat (21), a tenth driving device (2 r) for driving the third conveying seat (2 p) to be horizontally aligned with the first conveying seat (2 n) or the processing seat (21), and an eleventh driving device (2 m) for driving the processing seat (21) to be close to the second conveying seat (2 o) or the third conveying seat (2 p).
8. The camera module cleaning apparatus of claim 7, wherein: the first conveying seat (2 n), the second conveying seat (2 o) and the third conveying seat (2 p) are respectively provided with a plurality of third rolling conveying assemblies (2 s) which are horizontally arranged.
9. The camera module cleaning apparatus according to claim 1, wherein: one side of frame (1) is connected with unloading mechanism (5), unloading mechanism (5) including mount table (51), install in fourth conveying seat (52), fifth conveying seat (53), storage seat (54) of mount table (51) and drive fourth conveying seat (52) and the nineteenth drive arrangement (55) that fifth conveying seat (53) or storage seat (54) level were aligned, a plurality of first roll conveying component (56) have been installed to fourth conveying seat (52) horizontal arrangement, and a plurality of second roll conveying component (57) have been installed to fifth conveying seat (53) horizontal arrangement.
10. The camera module cleaning apparatus of claim 9, wherein: the fifth conveying seat (53) and the material storage seat (54) are arranged in parallel, the fourth conveying seat (52) is positioned on one side face of the fifth conveying seat (53) and one side face of the material storage seat (54), and the mounting table (51) is provided with a thirteenth driving device (58) for driving the material storage seat (54) to ascend and descend.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201920446781.5U CN209901872U (en) | 2019-04-03 | 2019-04-03 | Camera module cleaning equipment |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201920446781.5U CN209901872U (en) | 2019-04-03 | 2019-04-03 | Camera module cleaning equipment |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN209901872U true CN209901872U (en) | 2020-01-07 |
Family
ID=69034358
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201920446781.5U Active CN209901872U (en) | 2019-04-03 | 2019-04-03 | Camera module cleaning equipment |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN209901872U (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110076140A (en) * | 2019-04-03 | 2019-08-02 | 东莞广达智能科技有限公司 | Camera module cleaning equipment |
-
2019
- 2019-04-03 CN CN201920446781.5U patent/CN209901872U/en active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110076140A (en) * | 2019-04-03 | 2019-08-02 | 东莞广达智能科技有限公司 | Camera module cleaning equipment |
| CN110076140B (en) * | 2019-04-03 | 2024-03-22 | 东莞广达智能科技有限公司 | Camera module cleaning equipment |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110076140B (en) | Camera module cleaning equipment | |
| CN210876083U (en) | Lens application equipment | |
| CN210486789U (en) | Surface detection device | |
| CN108581473A (en) | Motor rotor indentation rear axle socket joint enters automatic assembling device | |
| CN113008142A (en) | Earphone middle frame size detection equipment | |
| CN115108313B (en) | Coating feeding and discharging machine and coating feeding and discharging method | |
| CN209901872U (en) | Camera module cleaning equipment | |
| CN114705693A (en) | AI visual inspection device and system for shell structure defect detection | |
| CN215064318U (en) | Earphone middle frame size detection equipment | |
| CN210876330U (en) | Automatic sorting equipment | |
| CN216145355U (en) | Laminating equipment of display module and backlight module | |
| CN214769698U (en) | Laser marking production line | |
| CN114672871A (en) | Marking and printing equipment | |
| CN113628539A (en) | Laminating equipment and laminating method for display module and backlight module | |
| CN105772339B (en) | A kind of equipment of polishing automatically | |
| CN214139285U (en) | Automatic paste mark integration equipment | |
| CN221318269U (en) | Snatch transplanting mechanism | |
| CN216141614U (en) | Automatic go up coating film anchor clamps equipment | |
| CN216730421U (en) | Workpiece assembling device | |
| CN211520922U (en) | Feeding system | |
| CN215421490U (en) | Mounting mechanism | |
| CN210884196U (en) | Material taking device | |
| CN209758522U (en) | Material collecting equipment | |
| CN113911699B (en) | Processing equipment | |
| CN217376418U (en) | Conveying and positioning table of compressor base |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |