CN202499677U - Heave compensation control system of marine investigation equipment - Google Patents
Heave compensation control system of marine investigation equipment Download PDFInfo
- Publication number
- CN202499677U CN202499677U CN2012201218537U CN201220121853U CN202499677U CN 202499677 U CN202499677 U CN 202499677U CN 2012201218537 U CN2012201218537 U CN 2012201218537U CN 201220121853 U CN201220121853 U CN 201220121853U CN 202499677 U CN202499677 U CN 202499677U
- Authority
- CN
- China
- Prior art keywords
- heave compensation
- compensation
- control system
- prospecting equipment
- crane
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


Landscapes
- Control Of Position Or Direction (AREA)
Abstract
The utility model relates to marine investigation equipment, belonging to the field of marine investigation and particularly relates to a heave compensation control system of the marine investigation equipment. The heave compensation control system comprises investigation equipment and a carne connected through a steel wire rope, and further comprises a leading sheave and a compensation oil cylinder, wherein the leading sheave and the compensation oil cylinder are arranged between the investigation equipment and the crane, the steel wire rope for connecting the investigation equipment and the crane rounds the leading sheave after coming out from the crane, and then is connected with the investigation equipment after rounding the compensation oil cylinder, the leading sheave is provided with a steel wire rope tension sensor, the compensation oil cylinder is connected with an energy accumulator, the steel wire rope tension sensor transmits signals to a heave compensation controller which is connected with the crane so as to control the crane to regulate the investigation equipment. According to the utility model, the oil cylinder is combined with tension compensation and passive compensation is combined with active compensation, so that the heave compensation control system is suitable for various wave conditions, and is economic in energy, high in efficiency, more fit with filed condition and high in control speed.
Description
Technical field
The utility model relates to a kind of ocean prospecting equipment, relates in particular to the heave compensation control system of ocean prospecting equipment.
Background technology
Ample resources is being contained in the ocean, and resource exploration utilizes China's marine cause development significant with exploitation.The Exploration Ship that has generally assembled ocean prospecting equipment sets out the sea when exploring activity; Owing to hull and prospecting equipment in the course of the work can be along with wave motion produces the vertical and horizontal vibration; Thereby make the hoisting wirerope generation stretching and the flexural deformation that are used to hang the equipment of prospecting that are installed in fore or profile, therefore influence the reliability and stability of ocean survey system.In order to guarantee the prospecting equipment stability of operation in the stormy waves at sea, in the survey system of ocean, need to increase the control of wave heave compensation.
At present, the heave compensation system of the used prospecting equipment of marine operation divides by the power supply and mainly contains two kinds of passive compensation and Active Compensation.The compensation power resources of passive charging system, rely on the hoisting force of wave and the gravity of ship self to compress and discharge the pressurized air in the energy storage, thereby the heave that wave causes are necessarily compensated when the ship heave in this heave in wave of ship.This kind wave compensation system is consumption of power hardly, therefore uses more extensive.But the disadvantage of this compensation way is exactly the compensation performance instability, and it is bigger to lag behind, and can't realize stable control.And the mode of operation of another kind of active wave compensation system is the real-time wave forecast information according to issue; The energy of the engine of employing charging system carries out Active Compensation to the wave on the same day; The influence to prospecting equipment of heave phenomenon that wave causes is resisted in the work of ACTIVE CONTROL charging system, as adopting Hydraulic Pump as propulsion source.The type charging system can adopt controlled reset, and antijamming capability is strong, and comformability is good, and compensation precision is high, and compensation performance is stable.But the power that consumes is bigger, and the quantity of information and the information processed amount that need are also very big, is not suitable for middle low power prospecting equipment and small-sized prospecting occasion.
Summary of the invention
The utility model technical matters to be solved provides a kind of heave compensation control system of ocean prospecting equipment; The heave compensation system that solves present prospecting equipment partly lags behind bigger; Can't realize stable control; The power that part consumes is too big, and the quantity of information and the information processed amount that need are also very big, is not suitable for the defective of middle low power prospecting equipment and small-sized prospecting occasion.
Technical scheme
A kind of heave compensation control system of ocean prospecting equipment; Comprise prospecting equipment and adopt the steel rope bonded assembly to play crane, it is characterized in that: also comprise leading sheave and compensating cylinder, said leading sheave and compensating cylinder are arranged on prospecting equipment and rise between the crane; Connecting prospecting equipment walks around at leading sheave after crane comes out with the steel rope that plays crane; Be connected with prospecting equipment after walking around compensating cylinder again, the steel wire rope tension sensor is installed on the said leading sheave, said compensating cylinder is connected with energy storage; Said steel wire rope tension sensor transmits signals to the heave compensation controller; Said heave compensation controller is connected with a crane, has controlled the crane motion, thus adjustment prospecting equipment.
Said compensating cylinder is provided with position switch, and said position switch is electrically connected with said heave compensation controller, transmits signals to the heave compensation controller.
Said position switch comprises the bound bit switch that is installed in the compensating cylinder T&B respectively.
Said position switch also comprises the midway location switch and near the lower limit anticipation switch at the bottom of the compensating cylinder.
Said midway location switch comprises position switch and two position switchs of meta upper/lower positions switch on the meta.
With total wire joint, said boats and ships heave measurement mechanism comprises the wave sensor to said heave compensation controller also and between the boats and ships heave measurement mechanism, and accekeration that the wave sensor is recorded and wave height parameter or shift value parameter send the heave compensation controller to.
Said crane adopts hydraulic wireline winch, provides the hydraulic efficiency servo of hydraulic wireline winch power to be connected with the heave compensation controller, and the control signal that receives the heave compensation controller changes the power of hydraulic wireline winch, the motion of modulated pressure winch.
Said tension pick-up is arranged on the centre rotational axis of said leading sheave.
Said compensating cylinder comprises cylinder body and along the plunger of inboard wall of cylinder block up-and-down movement, said cylinder body and bonded assembly fixed pulley fixedly install, and said plunger is provided with movable pulley, and steel rope is walked around between said fixed pulley and movable pulley.
Beneficial effect
The heave compensation control system and the method for the ocean prospecting equipment of the utility model use oil cylinder and tension compensating to combine, and passive compensation and Active Compensation combine, and are applicable to various wave situation; And efficient is also high energy-conservation the time, because oil cylinder and steel wire rope tension feed back in real time, therefore more presses close to field conditions; Control rate is fast; Data processing amount is few, and cost reduces, and is applicable to all types of prospecting occasions.
Description of drawings
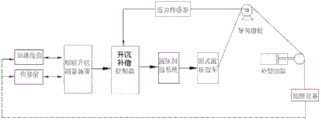
Fig. 1 is that device heave compensation control system composition schematic block diagram is reconnoitred in the ocean.
Fig. 2 is that the device scheme drawing is reconnoitred in the ocean.
Fig. 3 is the compensating cylinder structural representation.
Wherein: the 1-hydraulic wireline winch, 2-reconnoitres equipment, 3-leading sheave, 4-compensating cylinder, 5-energy storage, 6-travel position switch, 7-cylinder body, 8-plunger, 9-cylinder pedestal, 10-fixed pulley, 11-movable pulley, 12-guide rod.
The specific embodiment
Below in conjunction with specific embodiment and accompanying drawing, further set forth the utility model.
With shown in the accompanying drawing 2, the compensation control system of the utility model mainly comprises compositions such as the position switch, leading sheave 3 of boats and ships heave measurement mechanism, tension pick-up, heave compensation controller, compensating cylinder 4 and oil cylinder stroke monitoring like accompanying drawing 1.
Described boats and ships heave measurement mechanism is used to gather the accekeration and the shift value of boats and ships vertical direction, calculates passive charging pressure.
The tension pick-up of the utility model is installed on the center shaft of the leading sheave 3 on the derrick; Tension pick-up is used to measure the tension parameters of hydraulic wireline winch steel rope; The heave compensation controller module is according to steel wire rope tension calculation of parameter compensation rate; Send control signal to hydraulic efficiency servo, modulated pressure winch 1 carries out Active Compensation and boats and ships drift compensation.Active Compensation is controlled can say good-bye force control mode and oil cylinder stroke position control mode, and compensation way is provided with decision according to priority, and compensating cylinder and energy storage master mode are adopted in passive compensation.
Be furnished with travel position switch 6 in the utility model on the compensating cylinder base 9, wherein oil cylinder upper limit Sx1 and lower limit Sx5 position switch adopt the mechanical trip switch, and other oil cylinder position switch adopts metal inductive near switch.Oil cylinder stroke control compensation pattern is closed through oil cylinder bound bit switch, intermediate open position and is carried out Active Compensation.
The utility model system works at first need be carried out the initialization setting to the heave compensation controller, operating water depth (m), sea conditions is set, the pid parameter of initial setting controller.
The employing prediction that is provided with of compensation control system is provided with, and prediction setting is to fall at prospecting equipment to put a kind of setting of carrying out before.Calculate: the definite data h of the depth of water that 1. at first measures the operation point with echosounder; Calculate the gravity G of steel rope in water (remove buoyant of sea water after gravity) according to h; For example when depth of water h equals 3000m, G3000=514.7kg/100M * 1 * 9.8 (7.8-1.03)/7.8=131.3kN; 2. calculate balancing force F, F=G+20, for example F3000=151.34kN when depth of water 3000m; 3. calculate the oil pressure P0 of compensating cylinder when meta, operation P0=24F/ π D
2, P0=14.8MPa when 3000m for example.The pressure P when plunger 8 that 4. is calculated as compensating cylinder 4 goes out entirely
Go out=718/768P0, for example P when 3000m
Go out=13.8MPa.This calculating calculates the result automatically through the computing machine on the control desk after initialization.Calculate compensation of undulation charging pressure of accumulator and compensating cylinder precharge pressure, and inflation and precharge pressure alarming value are set, carry out energy storage pressurising operation according to result of calculation.
Winch cable is emitted length and is employed in and the method for measuring the pulley rotating speed near switch is installed on the corresponding leading sheave 3 of derrick measures and put rope speed and time, puts rope length thereby calculate, and gets involved control system.
Operation prospecting equipment is transferred, when prospecting equipment on earth after, system pressure can descend suddenly simultaneously that the situation that tension force descends suddenly also can appear in tension pick-up, represented prospecting equipment 2 on earth this moment, and demarcate and remember through computing machine.The prospecting equipment 2 oil cylinder middle of stroke switch that is masked as on earth has signal for the first time; This moment is cylinder action because pressure reduces, prospecting equipment 2 on earth after, the passive compensation of equipment is formally started working; Because sagging of load; Compensating cylinder 4 is under the situation that load reduces, owing to energy storage effect compensating cylinder plunger 8 will stretch out gradually, shown in accompanying drawing 3.On oil cylinder guide rod base, be furnished with the travel position switch, wherein oil cylinder upper limit Sx1 and lower limit Sx5 position switch adopt the mechanical trip switch, and other oil cylinder position adopts metal inductive near switch, to show oil cylinder plunger control position.Passive compensation is that hydraulic ram self-equalizing wave drifts along, if compensation rate is not enough, then system gets involved automatic Active Compensation work, and promptly main passive compensation acts on simultaneously.
The compensating cylinder travel switch is provided with a upper limit position switch Sx1; Two midway location switches, Sx2 are position switch on the meta, and Sx3 is a meta upper/lower positions switch; Two lower position switch, Sx4 are lower limit anticipation switch, and when being used for estimating that stroke will be near the lower position, Sx5 is a lower position switch.It mainly is to be used for memory to judge the oil cylinder sense of motion that the centre is provided with two position switchs, and two switching spaces are from 50-80mm.The upper-lower position switch also is used for control and opens Active Compensation except that being used to show the oil cylinder stroke position, and definite Active Compensation direction.When because the drift of the excessive or boats and ships of wave when causing the compensating cylinder stroke to cross up and down limit-switch positions, just starts Active Compensation, upper limit Sx1 imports when effective, and Active Compensation drives winch and receives rope; When lower limit anticipation switch S x4 is effective, begins to start Active Compensation and produce the slope output signal, stride across control dead area.Lower limit Sx5 imports when effective, and Active Compensation is quickened to drive winch and put rope; When oil cylinder stroke leaves end position, when being operated in midway location, the Active Compensation SELF CL.This stage system only needs passive compensation just passable.
Tension pick-up is installed on the sheave shaft on the derrick, is used for measuring the tension force of steel rope, and through tension control assembly output tension force real-time parameter, carries out active compensation of undulation and the control of boats and ships drift compensation according to the steel wire rope tension parameter.The wave sensor provides acceleration/accel, wave height parameter, and the pid control parameter of Active Compensation control is relevant with the acceleration/accel of mensuration, when the Theoretical Calculation of compensation of undulation power, also needs accekeration to be used to calculate force of inertia simultaneously.The wave acceleration/accel is imported through the CAN1 bus by boats and ships heave measurement mechanism.The pid control parameter of Active Compensation is introduced wave Acceleration Control parameter, and carries out control response according to the design-calculated controlling models.Tension Control compensation or oil cylinder stroke position control compensation model are provided with decision according to priority; After prospecting operation completion; Promptly turn off Active Compensation; The operation winch extracts prospecting equipment, and extraction equipment can be removed passive compensation work behind certain altitude (more than the end 50m off sea), promptly can carry out the oil extraction operation to compensating cylinder.
Claims (9)
1. the heave compensation control system of ocean prospecting equipment; Comprise prospecting equipment and adopt the steel rope bonded assembly to play crane, it is characterized in that: also comprise leading sheave and compensating cylinder, said leading sheave and compensating cylinder are arranged on prospecting equipment and rise between the crane; Connecting prospecting equipment walks around at leading sheave after crane comes out with the steel rope that plays crane; Be connected with prospecting equipment after walking around compensating cylinder again, the steel wire rope tension sensor is installed on the said leading sheave, said compensating cylinder is connected with energy storage; Said steel wire rope tension sensor transmits signals to the heave compensation controller; Said heave compensation controller is connected with a crane, has controlled the crane motion, thus adjustment prospecting equipment.
2. the heave compensation control system of prospecting equipment in ocean as claimed in claim 1, it is characterized in that: said compensating cylinder is provided with position switch, and said position switch is electrically connected with said heave compensation controller, transmits signals to the heave compensation controller.
3. the heave compensation control system of prospecting equipment in ocean as claimed in claim 2, it is characterized in that: said position switch comprises the bound bit switch that is installed in the compensating cylinder T&B respectively.
4. the heave compensation control system of ocean as claimed in claim 3 prospecting equipment is characterized in that: said position switch also comprises the midway location switch and near the lower limit anticipation switch at the bottom of the compensating cylinder.
5. the heave compensation control system of prospecting equipment in ocean as claimed in claim 4, it is characterized in that: said midway location switch comprises position switch and two position switchs of meta upper/lower positions switch on the meta.
6. the heave compensation control system of prospecting equipment in ocean as claimed in claim 1; It is characterized in that: said heave compensation controller also and between the boats and ships heave measurement mechanism with total wire joint; Said boats and ships heave measurement mechanism comprises the wave sensor, and accekeration that the wave sensor is recorded and wave height parameter or shift value parameter send the heave compensation controller to.
7. the heave compensation control system of prospecting equipment in ocean as claimed in claim 1; It is characterized in that: said crane adopts hydraulic wireline winch; Provide the hydraulic efficiency servo of hydraulic wireline winch power to be connected with the heave compensation controller; The control signal that receives the heave compensation controller changes the power of hydraulic wireline winch, the motion of modulated pressure winch.
8. the heave compensation control system of prospecting equipment in ocean as claimed in claim 1, it is characterized in that: said tension pick-up is arranged on the centre rotational axis of said leading sheave.
9. the heave compensation control system of prospecting equipment in ocean as claimed in claim 1; It is characterized in that: said compensating cylinder comprises cylinder body and along the plunger of inboard wall of cylinder block up-and-down movement; Said cylinder body and bonded assembly fixed pulley fixedly install; Said plunger is provided with movable pulley, and steel rope is walked around between said fixed pulley and movable pulley.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2012201218537U CN202499677U (en) | 2012-03-27 | 2012-03-27 | Heave compensation control system of marine investigation equipment |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2012201218537U CN202499677U (en) | 2012-03-27 | 2012-03-27 | Heave compensation control system of marine investigation equipment |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN202499677U true CN202499677U (en) | 2012-10-24 |
Family
ID=47036297
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2012201218537U Expired - Fee Related CN202499677U (en) | 2012-03-27 | 2012-03-27 | Heave compensation control system of marine investigation equipment |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN202499677U (en) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102602840A (en) * | 2012-03-27 | 2012-07-25 | 中国水产科学研究院渔业机械仪器研究所 | Heave compensating control system of ocean exploration equipment and control method |
| EP2896589A1 (en) | 2014-01-17 | 2015-07-22 | SAL Offshore B.V. | Method and apparatus |
| CN105000479A (en) * | 2014-04-22 | 2015-10-28 | 上海海洋大学 | Cable-controlled submersible deck lifting system with heave compensation and tension protection functions |
| CN106429871A (en) * | 2016-10-26 | 2017-02-22 | 武汉船用机械有限责任公司 | Wave compensation system and control method thereof |
| CN107191417A (en) * | 2017-04-06 | 2017-09-22 | 武汉船用机械有限责任公司 | A kind of wave compensating device and its compensating cylinder hydraulic control system |
| NO20161987A1 (en) * | 2016-12-15 | 2018-06-18 | Safelink As | Horizontal wireline compensator |
| CN112829880A (en) * | 2020-12-29 | 2021-05-25 | 武汉船舶设计研究院有限公司 | Mining vehicle distribution and recovery system suitable for deep sea mining |
| CN113697688A (en) * | 2021-08-16 | 2021-11-26 | 中际联合(北京)科技股份有限公司 | Loading and unloading equipment for ship cargo, compensation method and device thereof and offshore platform |
-
2012
- 2012-03-27 CN CN2012201218537U patent/CN202499677U/en not_active Expired - Fee Related
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102602840A (en) * | 2012-03-27 | 2012-07-25 | 中国水产科学研究院渔业机械仪器研究所 | Heave compensating control system of ocean exploration equipment and control method |
| CN102602840B (en) * | 2012-03-27 | 2014-10-29 | 中国水产科学研究院渔业机械仪器研究所 | Heave compensating control method of ocean exploration equipment |
| EP2896589A1 (en) | 2014-01-17 | 2015-07-22 | SAL Offshore B.V. | Method and apparatus |
| CN105000479B (en) * | 2014-04-22 | 2017-11-24 | 上海海洋大学 | Cable control submersible deck with heave compensation and tension force defencive function hangs system |
| CN105000479A (en) * | 2014-04-22 | 2015-10-28 | 上海海洋大学 | Cable-controlled submersible deck lifting system with heave compensation and tension protection functions |
| CN106429871A (en) * | 2016-10-26 | 2017-02-22 | 武汉船用机械有限责任公司 | Wave compensation system and control method thereof |
| CN106429871B (en) * | 2016-10-26 | 2018-07-06 | 武汉船用机械有限责任公司 | A kind of wave compensation system and its control method |
| NO20161987A1 (en) * | 2016-12-15 | 2018-06-18 | Safelink As | Horizontal wireline compensator |
| NO343571B1 (en) * | 2016-12-15 | 2019-04-08 | Safelink As | Horizontal wireline compensator |
| CN107191417A (en) * | 2017-04-06 | 2017-09-22 | 武汉船用机械有限责任公司 | A kind of wave compensating device and its compensating cylinder hydraulic control system |
| CN107191417B (en) * | 2017-04-06 | 2018-12-14 | 武汉船用机械有限责任公司 | A kind of wave compensating device and its compensating cylinder hydraulic control system |
| CN112829880A (en) * | 2020-12-29 | 2021-05-25 | 武汉船舶设计研究院有限公司 | Mining vehicle distribution and recovery system suitable for deep sea mining |
| CN113697688A (en) * | 2021-08-16 | 2021-11-26 | 中际联合(北京)科技股份有限公司 | Loading and unloading equipment for ship cargo, compensation method and device thereof and offshore platform |
| CN113697688B (en) * | 2021-08-16 | 2024-06-04 | 中际联合(北京)科技股份有限公司 | Loading and unloading equipment for ship cargoes, compensation method and device and offshore platform thereof |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102602840B (en) | Heave compensating control method of ocean exploration equipment | |
| CN202499677U (en) | Heave compensation control system of marine investigation equipment | |
| US10843904B2 (en) | Offshore crane heave compensation control system and method using visual ranging | |
| CN102943636B (en) | Winch heave compensation device for ocean floating drilling platform | |
| CN105398961B (en) | The ocean platform crane heave compensation control system testing stand of video ranging | |
| CN101780923B (en) | Heavy load salvage wave compensation system of super large floating crane | |
| CN104627857B (en) | Active heave compensation experimental provision | |
| CN100507202C (en) | Drilling column heave compensator for floating drill platform in the sea | |
| EP2896589B1 (en) | Method and apparatus | |
| CN101798909A (en) | Drilling column heave compensation device of marine floating type drilling platform | |
| CN102556875B (en) | Wave compensation system for marine exploration device | |
| CN104912494A (en) | Deep-water drilling overhead traveling crane type wave compensation device | |
| CN104890830A (en) | Control system for stabilizing and reducing swing through tuning heaving plate of deep-water dynamic-positioning semi-submersible platform | |
| CN107161882B (en) | A kind of novel Active Compensation loop wheel machine system | |
| CN105417381A (en) | Direct pump control type electro-hydraulic heaving compensation device | |
| CN103380053A (en) | Active heave compensation system and method | |
| CN209894604U (en) | Beach shallow sea sediment intensity in-situ test system | |
| CN105398965A (en) | Video-ranging offshore platform crane heave compensation control system and method | |
| CN104817019A (en) | Ship crane heaving compensation method based on hanger heaving motion forecast | |
| CN105113508B (en) | Positioning, sinking and controlling system for large-scale bridge deepwater prefabricated foundation | |
| CN103979416A (en) | Wave compensation execution device for crane ship A support | |
| CN205419559U (en) | Direct pump control formula electricity liquid heave compensator | |
| CN201236640Y (en) | Novel travelling hoist compensating system | |
| CN102071875B (en) | Automatic control system for winch and control method of automatic control system | |
| CN109653761B (en) | Double-cutting-part control system and method for excavating, supporting and anchoring combined unit |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20121024 Termination date: 20150327 |
|
| EXPY | Termination of patent right or utility model |