CN202499677U - 一种海洋勘察设备的升沉补偿控制系统 - Google Patents
一种海洋勘察设备的升沉补偿控制系统 Download PDFInfo
- Publication number
- CN202499677U CN202499677U CN2012201218537U CN201220121853U CN202499677U CN 202499677 U CN202499677 U CN 202499677U CN 2012201218537 U CN2012201218537 U CN 2012201218537U CN 201220121853 U CN201220121853 U CN 201220121853U CN 202499677 U CN202499677 U CN 202499677U
- Authority
- CN
- China
- Prior art keywords
- heave compensation
- compensation
- control system
- prospecting equipment
- crane
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


Landscapes
- Control Of Position Or Direction (AREA)
Abstract
本实用新型涉及一种海洋勘察设备,属于海洋勘察领域。一种海洋勘察设备的升沉补偿控制系统,包括勘察设备和采用钢丝绳连接的起吊车,还包括导向滑轮和补偿油缸,所述导向滑轮和补偿油缸设置在勘察设备和起吊车之间,连接勘察设备和起吊车的钢丝绳从起吊车出来后在导向滑轮上绕过,再绕过补偿油缸后和勘察设备连接,所述导向滑轮上安装有钢丝绳张力传感器,所述补偿油缸连接有蓄能器,所述钢丝绳张力传感器将信号传送至升沉补偿控制器,所述升沉补偿控制器与起吊车连接,控制起吊车调整勘察设备。本实用新型使用油缸和张力补偿结合,被动补偿和主动补偿结合,适用于各种波浪情况,而且节能的同时效率也高,更贴近现场状况,控制速度快。
Description
技术领域
本实用新型涉及一种海洋勘察设备,尤其涉及海洋勘察设备的升沉补偿控制系统。
背景技术
海洋蕴藏着大量资源,资源勘探和开采利用对我国海洋事业发展具有重要意义。一般装配了海洋勘察设备的勘探船出发到海上进行勘探活动时,由于船体及勘察设备在工作过程中会随着波浪运动而产生纵向和横向振动,从而使安装在船头或船体侧面的用于吊住勘察设备的起吊钢丝绳产生拉伸和弯曲变形,因此影响海洋勘察系统的可靠性和稳定性。为了保证勘察设备在海上风浪中作业的稳定性,在海洋勘察系统中需要增加海浪升沉补偿控制。
目前,海上作业所用的勘察设备的升沉补偿系统按动力供应来分主要有被动补偿和主动补偿两种。被动补偿系统的补偿动力来源于船本身在海浪中的升沉,当船升沉时,依靠海浪的举升力和船自身的重力来压缩和释放蓄能器中的压缩空气,从而对海浪造成的升沉进行一定补偿。此种波浪补偿系统几乎不消耗动力,因此应用比较广泛。但是这种补偿方式的最大缺点就是补偿性能不稳定,滞后比较大,无法实现稳定的控制。而另一种主动型波浪补偿系统的工作方式是按照发布的实时海浪预报信息,采用补偿系统的动力机的能源对当天的海浪进行主动补偿,主动控制补偿系统工作来抵制海浪造成的升沉现象对勘察设备的影响,如采用液压泵作为动力源。该类型补偿系统可以采用反馈控制,抗干扰能力强,适应性好,补偿精度高,补偿性能稳定。但是消耗的功率较大,需要的信息量和处理的信息量也很大,不适合于中小功率勘察设备和小型勘察场合。
发明内容
本实用新型所要解决的技术问题是提供一种海洋勘察设备的升沉补偿控制系统,解决现在的勘察设备的升沉补偿系统部分滞后比较大,无法实现稳定的控制,部分消耗的功率太大,需要的信息量和处理的信息量也很大,不适合于中小功率勘察设备和小型勘察场合的缺陷。
技术方案
一种海洋勘察设备的升沉补偿控制系统,包括勘察设备和采用钢丝绳连接的起吊车,其特征在于:还包括导向滑轮和补偿油缸,所述导向滑轮和补偿油缸设置在勘察设备和起吊车之间,连接勘察设备和起吊车的钢丝绳从起吊车出来后在导向滑轮上绕过,再绕过补偿油缸后和勘察设备连接,所述导向滑轮上安装有钢丝绳张力传感器,所述补偿油缸连接有蓄能器,所述钢丝绳张力传感器将信号传送至升沉补偿控制器,所述升沉补偿控制器与起吊车连接,控制起吊车运动,从而调整勘察设备。
所述补偿油缸上设置有位置开关,所述位置开关与所述升沉补偿控制器电连接,将信号传送至升沉补偿控制器。
所述位置开关包括分别安装在补偿油缸顶和底的上下限位开关。
所述位置开关还包括中间位置开关和接近补偿油缸底的下限位预判开关。
所述中间位置开关包括中位上位置开关和中位下位置开关两个位置开关。
所述升沉补偿控制器还与船舶升沉测量装置之间以总线连接,所述船舶升沉测量装置包括波浪传感器,将波浪传感器测得的加速度值和波高参数或位移值参数传送给升沉补偿控制器。
所述起吊车采用液压绞车,提供液压绞车动力的液压伺服系统与升沉补偿控制器连接,接收升沉补偿控制器的控制信号改变液压绞车的动力,控制液压绞车的运动。
所述张力传感器设置在所述导向滑轮的中心旋转轴上。
所述补偿油缸包括缸体和沿缸体内壁上下运动的柱塞,所述缸体与连接的定滑轮固定设置,所述柱塞上设置有动滑轮,钢丝绳从所述定滑轮和动滑轮之间绕过。
有益效果
本实用新型的海洋勘察设备的升沉补偿控制系统和方法使用油缸和张力补偿结合,被动补偿和主动补偿结合,适用于各种波浪情况,而且节能的同时效率也高,因为油缸和钢丝绳张力进行实时反馈,因此更贴近现场状况,控制速度快,数据处理量少,成本降低,适用于各类型勘察场合。
附图说明
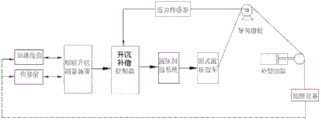
图1是海洋勘查装置升沉补偿控制系统组成示意框图。
图2是海洋勘查装置示意图。
图3是补偿油缸结构示意图。
其中:1-液压绞车,2-勘察设备,3-导向滑轮,4-补偿油缸,5-蓄能器,6-行程位置开关,7-缸体,8-柱塞,9-油缸底座,10-定滑轮,11-动滑轮,12-导杆。
具体实施方式
下面结合具体实施例和附图,进一步阐述本实用新型。
如附图1和附图2所示,本实用新型的补偿控制系统主要包括船舶升沉测量装置、张力传感器、升沉补偿控制器、补偿油缸4及油缸行程监测的位置开关、导向滑轮3等组成。
所述的船舶升沉测量装置用于采集船舶垂直方向的加速度值及位移值,计算被动补偿压力。
本实用新型的张力传感器安装在井架上的导向滑轮3的中心轴上,张力传感器用于测定液压绞车钢丝绳的张力参数,升沉补偿控制器模块根据钢丝绳张力参数计算补偿量,向液压伺服系统发出控制信号,控制液压绞车1进行主动补偿和船舶漂移补偿。主动补偿控制可分张力控制模式和油缸行程位置控制模式,补偿方式根据优先级设置决定,被动补偿采用补偿油缸和蓄能器控制模式。
本实用新型中补偿油缸底座9上布置有行程位置开关6,其中油缸上限Sx1和下限Sx5位置开关采用机械行程开关,其它油缸位置开关采用金属感应接近开关。油缸行程控制补偿模式通过油缸上下限位开关、中间位置开关进行主动补偿。
本实用新型系统工作首先需要对升沉补偿控制器进行初始化设置,设置作业水深(m)、海况条件,初步设定控制器的PID参数。
补偿控制系统的设置采用预测设置,预测设置是在勘察设备降放之前进行的一种设置。计算:①首先用测深仪测出工作点的水深确切数据h,根据h计算出钢丝绳在水中的重力G(除去海水浮力后的重力),例如在水深h等于3000m时,G3000=514.7kg/100M×1×9.8(7.8-1.03)/7.8=131.3kN;②计算出补偿力F,F=G+20,例如在水深3000m时F3000=151.34kN;③计算出补偿油缸在中位时的油压P0,操作P0=24F/πD2,例如在3000m时P0=14.8MPa。④计算为补偿油缸4的柱塞8全出时压力P出=718/768P0,例如在3000m时P出=13.8MPa。该计算通过控制台上的计算机在初始化后自动计算得到结果。计算出波浪补偿蓄能器充气压力以及补偿油缸充油压力,并设置充气和充油压力报警值,根据计算结果进行蓄能器充压操作。
绞车钢丝绳放出长度采用在井架的对应导向滑轮3上安装接近开关测量滑轮转速的方法来测定放绳速度与时间,从而计算出放绳长度,并介入控制系统。
操作勘察设备下放,当勘察设备到底后,系统压力会突然下降同时张力传感器也会出现张力突然下降的状况,此时表示勘察设备2已到底了,并通过计算机进行标定和记忆。勘察设备2到底的标志为油缸中间行程开关第一次有信号,此时因为压力减少而油缸动作,勘察设备2到底后,设备被动补偿正式开始工作,由于负荷下降,补偿油缸4在负荷减少的情况下,由于蓄能器作用补偿油缸柱塞8将逐渐伸出,如附图3所示。在油缸导杆底座上布置有行程位置开关,其中油缸上限Sx1和下限Sx5位置开关采用机械行程开关,其它油缸位置采用金属感应接近开关,以显示油缸柱塞工作位置。被动补偿是液压油缸自动平衡海浪浮沉,假如补偿量不够,则系统介入自动主动补偿工作,即主被动补偿同时作用。
补偿油缸行程开关设置了一个上限位开关Sx1;两个中间位置开关,Sx2为中位上位置开关,Sx3为中位下位置开关;两个下限位开关,Sx4为下限位预判开关,用来预计行程要接近下限位置时,Sx5为下限位开关。中间设置两个位置开关主要是用于记忆判断油缸运动方向,两开关间距离50-80mm。上下位置开关除用于显示油缸行程位置外,还用于控制打开主动补偿,并确定主动补偿方向。当由于波浪过大或船舶漂移造成补偿油缸行程越过上下限位开关位置时,就启动主动补偿,上限位Sx1输入有效时,主动补偿驱动绞车收绳;下限位预判开关Sx4有效时,开始起动主动补偿并产生斜坡输出信号,跨过控制死区。下限位Sx5输入有效时,主动补偿加速驱动绞车放绳;当油缸行程离开极限位置,工作在中间位置时,主动补偿自动关闭。此阶段系统仅仅需要被动补偿就可以了。
张力传感器安装在井架上的滑轮轴上,用来测定钢丝绳的张力,并通过张力控制器输出张力实时参数,根据钢丝绳张力参数进行主动波浪补偿和船舶漂移补偿控制。波浪传感器提供加速度、波高参数,主动补偿控制的PID控制参数与测定的加速度相关,同时在波浪补偿力的理论计算时也需要加速度值用于计算惯性力。波浪加速度由船舶升沉测量装置通过CAN1总线输入。主动补偿的PID控制参数,引入波浪加速度控制参数,并按照设计的控制模型进行控制响应。张力控制补偿或油缸行程位置控制补偿模式根据优先级设置决定,当勘察作业完工后,即关掉主动补偿,操作绞车提取勘察设备,提取设备到一定高度(离海底50m以上)后可以解除被动补偿工作,即可以对补偿油缸进行排油操作。
Claims (9)
1.一种海洋勘察设备的升沉补偿控制系统,包括勘察设备和采用钢丝绳连接的起吊车,其特征在于:还包括导向滑轮和补偿油缸,所述导向滑轮和补偿油缸设置在勘察设备和起吊车之间,连接勘察设备和起吊车的钢丝绳从起吊车出来后在导向滑轮上绕过,再绕过补偿油缸后和勘察设备连接,所述导向滑轮上安装有钢丝绳张力传感器,所述补偿油缸连接有蓄能器,所述钢丝绳张力传感器将信号传送至升沉补偿控制器,所述升沉补偿控制器与起吊车连接,控制起吊车运动,从而调整勘察设备。
2.如权利要求1所述的海洋勘察设备的升沉补偿控制系统,其特征在于:所述补偿油缸上设置有位置开关,所述位置开关与所述升沉补偿控制器电连接,将信号传送至升沉补偿控制器。
3.如权利要求2所述的海洋勘察设备的升沉补偿控制系统,其特征在于:所述位置开关包括分别安装在补偿油缸顶和底的上下限位开关。
4.如权利要求3所述的海洋勘察设备的升沉补偿控制系统,其特征在于:所述位置开关还包括中间位置开关和接近补偿油缸底的下限位预判开关。
5.如权利要求4所述的海洋勘察设备的升沉补偿控制系统,其特征在于:所述中间位置开关包括中位上位置开关和中位下位置开关两个位置开关。
6.如权利要求1所述的海洋勘察设备的升沉补偿控制系统,其特征在于:所述升沉补偿控制器还与船舶升沉测量装置之间以总线连接,所述船舶升沉测量装置包括波浪传感器,将波浪传感器测得的加速度值和波高参数或位移值参数传送给升沉补偿控制器。
7.如权利要求1所述的海洋勘察设备的升沉补偿控制系统,其特征在于:所述起吊车采用液压绞车,提供液压绞车动力的液压伺服系统与升沉补偿控制器连接,接收升沉补偿控制器的控制信号改变液压绞车的动力,控制液压绞车的运动。
8.如权利要求1所述的海洋勘察设备的升沉补偿控制系统,其特征在于:所述张力传感器设置在所述导向滑轮的中心旋转轴上。
9.如权利要求1所述的海洋勘察设备的升沉补偿控制系统,其特征在于:所述补偿油缸包括缸体和沿缸体内壁上下运动的柱塞,所述缸体与连接的定滑轮固定设置,所述柱塞上设置有动滑轮,钢丝绳从所述定滑轮和动滑轮之间绕过。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2012201218537U CN202499677U (zh) | 2012-03-27 | 2012-03-27 | 一种海洋勘察设备的升沉补偿控制系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2012201218537U CN202499677U (zh) | 2012-03-27 | 2012-03-27 | 一种海洋勘察设备的升沉补偿控制系统 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN202499677U true CN202499677U (zh) | 2012-10-24 |
Family
ID=47036297
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2012201218537U Expired - Fee Related CN202499677U (zh) | 2012-03-27 | 2012-03-27 | 一种海洋勘察设备的升沉补偿控制系统 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN202499677U (zh) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102602840A (zh) * | 2012-03-27 | 2012-07-25 | 中国水产科学研究院渔业机械仪器研究所 | 一种海洋勘察设备的升沉补偿控制系统及控制方法 |
| EP2896589A1 (en) | 2014-01-17 | 2015-07-22 | SAL Offshore B.V. | Method and apparatus |
| CN105000479A (zh) * | 2014-04-22 | 2015-10-28 | 上海海洋大学 | 具有升沉补偿和张力保护功能的缆控潜水器甲板吊放系统 |
| CN106429871A (zh) * | 2016-10-26 | 2017-02-22 | 武汉船用机械有限责任公司 | 一种波浪补偿系统及其控制方法 |
| CN107191417A (zh) * | 2017-04-06 | 2017-09-22 | 武汉船用机械有限责任公司 | 一种波浪补偿装置及其补偿油缸液压控制系统 |
| NO20161987A1 (en) * | 2016-12-15 | 2018-06-18 | Safelink As | Horizontal wireline compensator |
| CN112829880A (zh) * | 2020-12-29 | 2021-05-25 | 武汉船舶设计研究院有限公司 | 一种适用于深海采矿的采矿车布放回收系统 |
| CN113697688A (zh) * | 2021-08-16 | 2021-11-26 | 中际联合(北京)科技股份有限公司 | 用于船舶货物的装卸设备、补偿方法及其装置和海上平台 |
-
2012
- 2012-03-27 CN CN2012201218537U patent/CN202499677U/zh not_active Expired - Fee Related
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102602840A (zh) * | 2012-03-27 | 2012-07-25 | 中国水产科学研究院渔业机械仪器研究所 | 一种海洋勘察设备的升沉补偿控制系统及控制方法 |
| CN102602840B (zh) * | 2012-03-27 | 2014-10-29 | 中国水产科学研究院渔业机械仪器研究所 | 一种海洋勘察设备的升沉补偿控制方法 |
| EP2896589A1 (en) | 2014-01-17 | 2015-07-22 | SAL Offshore B.V. | Method and apparatus |
| CN105000479B (zh) * | 2014-04-22 | 2017-11-24 | 上海海洋大学 | 具有升沉补偿和张力保护功能的缆控潜水器甲板吊放系统 |
| CN105000479A (zh) * | 2014-04-22 | 2015-10-28 | 上海海洋大学 | 具有升沉补偿和张力保护功能的缆控潜水器甲板吊放系统 |
| CN106429871A (zh) * | 2016-10-26 | 2017-02-22 | 武汉船用机械有限责任公司 | 一种波浪补偿系统及其控制方法 |
| CN106429871B (zh) * | 2016-10-26 | 2018-07-06 | 武汉船用机械有限责任公司 | 一种波浪补偿系统及其控制方法 |
| NO20161987A1 (en) * | 2016-12-15 | 2018-06-18 | Safelink As | Horizontal wireline compensator |
| NO343571B1 (en) * | 2016-12-15 | 2019-04-08 | Safelink As | Horizontal wireline compensator |
| CN107191417A (zh) * | 2017-04-06 | 2017-09-22 | 武汉船用机械有限责任公司 | 一种波浪补偿装置及其补偿油缸液压控制系统 |
| CN107191417B (zh) * | 2017-04-06 | 2018-12-14 | 武汉船用机械有限责任公司 | 一种波浪补偿装置及其补偿油缸液压控制系统 |
| CN112829880A (zh) * | 2020-12-29 | 2021-05-25 | 武汉船舶设计研究院有限公司 | 一种适用于深海采矿的采矿车布放回收系统 |
| CN113697688A (zh) * | 2021-08-16 | 2021-11-26 | 中际联合(北京)科技股份有限公司 | 用于船舶货物的装卸设备、补偿方法及其装置和海上平台 |
| CN113697688B (zh) * | 2021-08-16 | 2024-06-04 | 中际联合(北京)科技股份有限公司 | 用于船舶货物的装卸设备、补偿方法及其装置和海上平台 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102602840B (zh) | 一种海洋勘察设备的升沉补偿控制方法 | |
| CN202499677U (zh) | 一种海洋勘察设备的升沉补偿控制系统 | |
| US10843904B2 (en) | Offshore crane heave compensation control system and method using visual ranging | |
| CN102943636B (zh) | 海洋浮式钻井平台绞车升沉补偿装置 | |
| CN105398961B (zh) | 视频测距的海洋平台起重机升沉补偿控制系统试验台 | |
| CN101780923B (zh) | 超大型浮吊的重载打捞波浪补偿系统 | |
| CN104627857B (zh) | 主动式波浪补偿实验装置 | |
| CN100507202C (zh) | 海洋浮式钻井平台钻柱升沉补偿装置 | |
| EP2896589B1 (en) | Method and apparatus | |
| CN101798909A (zh) | 海洋浮式钻井平台钻柱升沉补偿装置 | |
| CN102556875B (zh) | 一种海洋勘查装置的波浪补偿系统 | |
| CN104912494A (zh) | 深水钻井天车型波浪补偿装置 | |
| CN104890830A (zh) | 深水动力定位半潜式平台调谐垂荡板减摇减荡控制系统 | |
| CN107161882B (zh) | 一种新型的主动补偿吊机系统 | |
| CN105417381A (zh) | 直接泵控式电液升沉补偿装置 | |
| CN103380053A (zh) | 主动升沉补偿系统和方法 | |
| CN209894604U (zh) | 一种滩浅海沉积物强度原位测试系统 | |
| CN105398965A (zh) | 利用视频测距的海洋平台起重机升沉补偿控制系统及方法 | |
| CN104817019A (zh) | 一种基于吊物升沉运动预报的船用起重机升沉补偿方法 | |
| CN105113508B (zh) | 大型桥梁深水预制基础定位沉放控制系统 | |
| CN103979416A (zh) | 起重船a支架波浪补偿执行装置 | |
| CN205419559U (zh) | 一种直接泵控式电液升沉补偿装置 | |
| CN201236640Y (zh) | 新型天车补偿系统 | |
| CN102071875B (zh) | 一种绞车自动控制系统及控制方法 | |
| CN109653761B (zh) | 一种掘支锚联合机组双截割部控制系统及方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20121024 Termination date: 20150327 |
|
| EXPY | Termination of patent right or utility model |