CN1790902A - Self-adaptive filtering method and device - Google Patents
Self-adaptive filtering method and device Download PDFInfo
- Publication number
- CN1790902A CN1790902A CN 200410089454 CN200410089454A CN1790902A CN 1790902 A CN1790902 A CN 1790902A CN 200410089454 CN200410089454 CN 200410089454 CN 200410089454 A CN200410089454 A CN 200410089454A CN 1790902 A CN1790902 A CN 1790902A
- Authority
- CN
- China
- Prior art keywords
- module
- sigma
- subband
- phi
- matrix
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


Abstract
The invention relates to a adaptive filter method, which comprises: taking sub-band transformation to convert input signal sequence and desired signal into frequency domain, defining a cost function based on sub-band weighting recurring LS method, and obtaining the iteration formula for filter coefficient vector (in frequency domain) to realize the adaptive regulation.
Description
Technical field
The present invention relates to filtering method and device, especially adaptive filter method and device belong to areas of information technology.
Background technology
The design sef-adapting filter mainly is to implant different alternative manners and constitute in filter module.Purpose is to find the filter coefficient of one group of optimum to make residual error e (n) infinitely small.So-called recurrence least square sef-adapting filter (RLSAF, RecursiveLeast-Squares Adaptive Filters) method utilizes least square method to estimate filter tap coefficients at n-1 exactly constantly, at n constantly, utilize the new data information that receives that filter tap coefficients is upgraded.Recurrence least square sef-adapting filter RLS method is owing to utilized the inverse matrix of data correlation matrixes, albefaction the input data, therefore have than lowest mean square (LMS, Least-Mean-Square) method convergence rate faster, and the spectral characteristic of constringency performance and signal is irrelevant, but also because of upgrading the iteration that the data of each sampling instant are carried out sub-band transforms and filter coefficient, the computation complexity height, required storage is big, is unfavorable for real-time implementation, and amount of calculation is O (ML
2), O represents magnitude.
The main thought of subband Weighted adaptive filtering (WASF, Weighted Adaptive Subband Filtering) method is the weighted value of regulating subband by at frequency domain, realizes the control to the deal of subband signal in the entire method iterative process.When low speed mobile communication slow, become during fading channel estimates, can reduce or avoid the stronger narrow-band interference signal of power (NBI, Narrow BandInterference) influence, but and degree of precision estimate the time-domain response of channel.In addition, the adjustment process of weighted value is adaptive, and the weights after stablizing distribute relevant with each subband signal signal to noise ratio, and the subband signal that signal to noise ratio is big has big weights.Subband Weighted adaptive filtering WASF method based on the sub band number of sub-band transforms will be subjective selected according to the requirement of using, irrelevant with the tap number of filter.Simultaneously, arbitrary sub-band transforms, perhaps spatial alternation as required, all can be applied in the subband Weighted adaptive filtering WASF method, that is to say that subband Weighted adaptive filtering WASF method is very strong to the adaptive capacity of different sub-band conversion.
Summary of the invention
The purpose of this invention is to provide a kind of adaptive filter method and device, the very fast convergence rate that has with recurrence least square sef-adapting filter method, and convergence and signal spectrum characteristic are irrelevant, being filter incorporates in the subband Weighted adaptive filtering WASF method the input signal spectrum advantage with good robustness that distributes, the two combines, and further promotes.
Realization principle of the present invention is as follows:
Suppose that filter input signal is x (n), the desired signal of output is y (n), adopts transverse filter structure, approaches the filter coefficient vector of estimation
Be the filter tap number, the residual error of estimation is e (n).The applying subband conversion is shone upon input signal x (n), desired signal y (n), residual error e (n) respectively on M different subband, promptly to 0≤i≤M-1, and k ∈ Z
+, have
Here, X (n)=[x (n), x (n-1), L, x (n-L+1)]
T, { Ψ
I, k(n) } represent the basic function of sub-band transforms, subscript i, k represent the sequence number and the time shifting of subband basic function respectively, and time shifting is chosen as signals sampling at interval at interval, and the selection of number of sub-bands M is decided according to the complexity of requirement of actual application and method.After providing subband weighting recurrence least square adaptive-filtering RLS-WASF training method structure, the residual error on each subband is expressed as
The cost function WLS of definition subband weighting recurrence least square adaptive-filtering RLS-WASF method is
WLS reaches minimum value when the cost function, promptly
The time, subband weighting recurrence least square sef-adapting filter RLS-WASF method obtains filter coefficient
 Best estimate.In order on each subband, to use the recursive iteration structure of recurrence least square adaptive-filtering RLS method, can be defined as follows the weights { ω of each subband with respect to the different weighted value of configuration on different sub-band again simultaneously
I, k}
Best estimate.In order on each subband, to use the recursive iteration structure of recurrence least square adaptive-filtering RLS method, can be defined as follows the weights { ω of each subband with respect to the different weighted value of configuration on different sub-band again simultaneously
I, k}
ω
i,k=ω
i,tη
t-k,0<η≤1,0≤i≤M-1 (7)
In the formula, the forgetting factor of η for setting.At formula (5), calculate its gradient
Obviously, when formula (6) was set up, gradient should be 0, promptly
In order to simplify expression formula, make the weighted correlation coefficient matrix
Weighting cross correlation matrix number
Just
Each t directly calculates Φ constantly
-1(t) complexity is very high, in order to simplify complexity, Φ (t) is written as
And hypothesis ω
I, t=ω
I, t-1, then have
With the following formula right side second is designated as A, expands into following formula:
In the Practical Calculation process, L<<+∞, so have
Matrix A can be noted by abridging and is
Note
Then matrix A can be similar to and be decomposed into
Formula (12) can be write as again
Φ(t)=ηΦ(t-1)+U(t)U
H(t) (14)
According to the inverse matrix theorem in the matrix theory, the inverse matrix Φ of correlation matrix
-1(t) recursive calculation formula is
Wherein, because U
H(t) Φ
-1(t-1) U (t) is a numerical value, so have
U
H(t)Φ
-1(t-1)U(t)=tr[U
H(t)Φ
-1(t-1)U(t)]
Again according to matrix theory, when U (t) is a column vector
tr[U
H(t)Φ
-1(t-1)U(t)]=tr[Φ
-1(t-1)U(t)U
H(t)]
Then have
U
H(t)Φ
-1(t-1)U(t)=tr[Φ
-1(t-1)U(t)U
H(t)]
Secondly, according to matrix theory numerical value
Have equally
By aforementioned analysis,
Be
Finally have
Bring formula (16) into iterative equation that formula (15) obtains final weighted correlation coefficient inverse matrix
Utilize the inner link of cross correlation matrix number again, write Z (t) as following form
And hypothesis ω
I, t=ω
I, t-1, then have
With formula (18) substitution formula (11), so far, obtain the key equation of subband weighting recurrence least square adaptive-filtering RLS-WASF method about transversal filter coefficient vector iteration
Wherein, I is the unit matrix of L*L, and hypothesis, Φ
-1(0)=I.As for the weights iteration on each subband, obtain by following scheme simply, promptly
Order
ω then
I, k=1/E|e
I, k|
2Consider the changeability of residual error in the convergence process, during practical operation, should estimate desired value E|e with following formula
I, k|
2, promptly
Wherein, 0<f≤1 is for reconciling the forgetting factor of subband residual error, and when k<0, E|e
I, k|
2=0.
In sum, the design of subband weighting recurrence least square sef-adapting filter can obtain the filter coefficient vector (frequency domain) that self adaptation is adjusted by following steps
 And by the tap coefficient vector of filter
Constitute filter.Adaptive filter method step of the present invention is as follows:
And by the tap coefficient vector of filter
Constitute filter.Adaptive filter method step of the present invention is as follows:
The first step is with input signal sequence X (n)=[x (n), x (n-1), L, x (n-L+1)]
TAnd desired signal y (n) carries out sub-band transforms, obtains its projection X on M different subspace in complete frequency domain space respectively
0, k: X
M-1, kAnd y
0, t: y
M-1, t
Second step, obtain the weighted value on t moment M subband, current t is the weights ω of k subband constantly
I, t, and use E|e
I, t|
2Inverse estimate i.e. ω
I, t=1/E|e
I, t|
2
The 3rd goes on foot, and utilizes the weighted correlation coefficient inverse matrix Φ in the previous moment
-1(t-1) and the result in first and second step, calculate the weighted correlation coefficient inverse matrix Φ of current time
-1(t), iterative equation is as follows:
The 4th goes on foot, and utilizes the weighted correlation coefficient inverse matrix Φ in the previous moment
-1(t-1) and the filter coefficient vector
Deng, try to achieve current t filter coefficient constantly
 Iterative equation is as follows:
Iterative equation is as follows:
Thereby obtain the adjusted filter coefficient vector of self adaptation (frequency domain)
The superperformance of subband weighting recurrence least square sef-adapting filter RLS-WASF method of the present invention is analyzed as follows: suppose: (1) forgetting factor η=1;
(2) the weighting input signal of different sub-band
Independent same distribution;
(3) weighting input signal
Be that an average is 0, correlation matrix is the stochastic variable of the multidimensional Gaussian Profile of R;
(4) the approximate error e of formula (1) definition
I, kBe that an average is 0, variance is σ
2The Gaussian stochastic variable.Then have:
Performance 1:
Be to estimate partially about the nothing of H;
Performance 2: transversal filter
Estimate variance can reach carat U.S.A boundary (Cramer-Rao Lower Bound) of leaving behind;
Performance 3: subband weighting recurrence least square adaptive-filtering RLS-WASF method can restrain in the limited step.
In fact, traditional sef-adapting filter method as recurrence least square RLS method, is a kind of special case of subband weighting recurrence least square adaptive-filtering RLS-WASF method, because in fact recurrence least square RLS method has used a kind of orthogonal transform---the pulse function, promptly
And the pulse function keeps quadrature on time domain:
Description of drawings
Fig. 1 is the training structure schematic diagram of the inventive method.
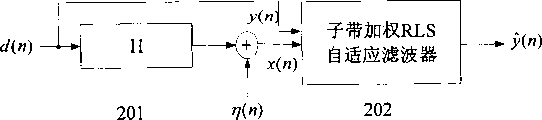
Fig. 2 is the principle schematic of apparatus of the present invention a kind of embodiment in communication system.Wherein, 201-H is the channel impulse response function, 202-subband weighting recurrence least square sef-adapting filter.
Fig. 3 is the principle schematic of channel estimator part in communication system in an embodiment of the present invention.Wherein, the channel estimator in the 301-subband weighting recurrence least square sef-adapting filter (RLS-WASF Channel Estimation).
Fig. 4 is that an embodiment of the present invention channel-estimator block is formed schematic diagram.Wherein, 401-input signal x (n) sub-band transforms module, 402-desired signal y (n) sub-band transforms module, 403-Φ
-1(t-1) register module,
Register module, 405-weights computing module, 406-are asked the contrary module of weighted correlation matrix, 407-calculating filter coefficient module.
Fig. 5 is a module relationship schematic diagram in an embodiment of the present invention channel estimator.
Embodiment
The present invention generally is used for the parameter Estimation of linear modelling, can be used for carrying out channel estimating, linear equalization or the like in communication system.Be example hereinafter,, the inventive method be described in further detail based on transverse filter structure with the channel estimator.
See also Fig. 2-5, a kind of embodiment of the present invention, channel estimator 302 based on subband weighting recurrence least square adaptive filter method, mainly be input signal sequence, desired signal to be carried out sub-band transforms respectively be transformed into frequency domain, define the cost function of a subband weighting recurrence least square method then, derive the iteration formula of filter coefficient vector (frequency domain), realize the self adaptation adjustment of coefficient.In white adaptive filter 202, RLS-WASF channel estimator 302 is regarded the part of filter 202 as.During filter 202 designs, carry out channel estimating with input signal x (n) and desired signal y (n) earlier, obtain the tap coefficient vector of subband weighting recurrence least square sef-adapting filter 202 with adaptive approach
Be the output of channel estimator 302---optimum filter coefficient vector
 Constitute transversal filter 202 by the filter coefficient vector again.Input signal x (n) obtains the estimated value of the few y (n) of desired signal after by transversal filter 202 filtering
Constitute transversal filter 202 by the filter coefficient vector again.Input signal x (n) obtains the estimated value of the few y (n) of desired signal after by transversal filter 202 filtering
 Just, with input signal sequence X (n)=[x (n), x (n-1), L, x (n-L+1)]
TAnd desired signal y (n) carries out sub-band transforms, the process transversal filter
Just, with input signal sequence X (n)=[x (n), x (n-1), L, x (n-L+1)]
TAnd desired signal y (n) carries out sub-band transforms, the process transversal filter
After, again it is carried out the subband inverse transformation, finally obtain estimated value to desired signal y (n)
Wherein, because the filter coefficient vector
 Be subjected to error
Be subjected to error
Control is by right
 Constantly regulate, can find the filter coefficient vector of one group of optimum
Constantly regulate, can find the filter coefficient vector of one group of optimum
 Make residual error e (n) infinitely small.
Make residual error e (n) infinitely small.
Be example with the impulse response of estimating unknown fixing/low speed mobile telecommunication channel below, be described in detail implementation procedure based on the channel estimator 302 of subband weighting recurrence least square adaptive-filtering RLS-WASF method.
The present invention implants subband weighting recurrence least square adaptive-filtering RLS-WASF method channel estimator, by input signal x (n) sub-band transforms module 401, desired signal y (n) sub-band transforms module 402, Φ
-1(t-1) register module 403,
Register module 404, weights computing module 405, ask contrary module 406 of weighted correlation matrix and calculating filter coefficient vector module 407 to form.
If d (n) is a test signal, η (t) is an additive white Gaussian noise, and H301 is a channel impulse response,
Be the inverse of the channel impulse response that estimates (just filter coefficient vector, be used for the influence of filtering channel to test signal) that x (n) is the channel estimator input signal, y (n) is a desired signal.Test signal d (n) is through channel, obtains channel estimator input signal x (n) after adding white Gaussian noise η (t), and channel estimator desired signal y (n) is test signal d (n), then has expression formula as follows:
x(n)=d(n)*h(n)+η(n)
y(n)=d(n)
If the gross sample points N of module known parameters: number of sub-bands M, sub-band transforms basic function, filter coefficient length L (also being that the input signal data sequence is long), forgetting factor f, white Gaussian noise η (n).Each module effect is as follows:
In input signal x (n) sub-band transforms module 401: at first with input signal x (n) input shift register, each signal sampling is shifted once constantly, obtains the long data sequence X of L (n)=[x (n), x (n-1), L, the x (n-L+1)] that be
T, then with sequence according to following formula
Carry out sub-band transforms, try to achieve its projection X on M different subspace in complete frequency domain space
0, k: X
M-1, k, Ψ wherein
I, k(n) represent the basic function of sub-band transforms, i represent the subband basic function sequence number (i=0,1 ... M-1), the displacement of k express time, parameter n is also for time shifting, N represent the sub-band transforms basic function total number of samples (general, N is very big, and N>>L).Here the sub-band transforms to vector is exactly that each element in the vector is carried out sub-band transforms.
In desired signal y (n) sub-band transforms module 402, equally also desired signal y (n) is carried out sub-band transforms, as shown in the formula:
Obtain M the mapping y on the different sub-band
0, t: y
M-1, t
At Φ
-1(t-1) in the register module 403: Φ
-1(t-1) register is used for depositing the inverse matrix of the weighted correlation coefficient matrix Φ (t-1) of previous moment, and register array is L*L, presses correlation matrix and arranges.At t=0 constantly, make Φ
-1(0)=and I, I is a unit matrix, is about to Φ
-1(t-1) the register array value is pressed unit matrix I initialization.At the beginning of each sampling instant, module will be deposited matrix Φ in the register
-1(t-1) give respectively and ask the contrary module 406 of weighted correlation matrix, calculating filter coefficient vector module 407, when calculating filter coefficient vector module 407 calculates this moment filter update coefficient
 After, module is asked reception the output matrix Φ of the
After, module is asked reception the output matrix Φ of the contrary module 406 of weighted correlation matrix
-1(t), and in order to upgrade register is the weighted correlation coefficient inverse of a matrix matrix of current time.
In the register module 404:
 Register is used for depositing the filter coefficient vector of previous moment
Register is used for depositing the filter coefficient vector of previous moment
At t=0 constantly, order
Here 0 represents null vector.At the beginning of each sampling instant, this module is with the previous moment filter coefficient
Give weights computing module 405, calculating filter coefficient vector module 407 respectively, when calculating filter coefficient vector module 407 calculates this moment filter update coefficient
After, module receives the output from calculating filter coefficient vector module 407
Make
Register is updated to the filter iteration coefficient of current time.
In weights computing module 405: weights computing module inside also comprises a register except that computing unit, is used for storing previous moment subband residual error e
I, t-1Mould square desired value E|e
I, t-1|
2In each sampling instant, the output X of weights computing module 405 receiving inputted signal x (n) sub-band transforms modules 401
I, t, desired signal y (n) sub-band transforms module 402 output y
I, tAnd
The output of register in the register module 404
 And by following steps calculating weighted value ω
I, tTotal M of such processing module, correspondence calculates M the weighted value on each subband, weights ω
I, tCalculation procedure is as follows:
And by following steps calculating weighted value ω
I, tTotal M of such processing module, correspondence calculates M the weighted value on each subband, weights ω
I, tCalculation procedure is as follows:
Step (1): if t=0, then initialization internal register E|e
I, t-1|
2=1;
Step (2): the residual error e on current t corresponding each subband of i of the moment is obtained in definition according to the subband residual error
I, tThe subband residual error is defined as desired signal y
I, tWith the estimation desired signal
Between error, expression formula is as follows:
Here use previous moment filter coefficient
 To input signal X
I, tFiltering obtains the estimated value of the desired signal of current time
To input signal X
I, tFiltering obtains the estimated value of the desired signal of current time
Step (3): current time subband residual error mould square desired value E|e
I, t|
2With the error current mould square | e
I, t|
2Be multiplied by forgetting factor f, add E|e
I, t-1|
2Be multiplied by 1 with the forgetting factor difference and represent that expression formula is as follows:
E|e
i,t|
2=f|e
i,t|
2+(1-f)E|e
i,t-1|
2
With the desired value E|e that tries to achieve
I, t|
2Deposit internal register in;
Step (4): current t is the weights ω of k subband constantly
I, tUse E|e
I, t|
2Inverse estimate i.e. ω
I, t=1/E|e
I, t|
2
In asking the contrary module 406 of weighted correlation matrix: at the beginning of each sampling instant, ask the contrary module 406 of weighted correlation matrix to receive Φ
-1(t-1) the output Φ of register module 403
-1(t-1), the output X of input signal x (n) sub-band transforms module 401
0, t: X
M-1, tAnd the output ω of weights computing module 405
0, t: ω
M-1, t, and be used for calculating current t weighted correlation coefficient inverse of a matrix matrix Φ constantly
-1(t).The iterative equation that utilizes current time input signal information to try to achieve on the basis of original inverse matrix is as follows:
In calculating filter coefficient vector module 407: at the beginning of each sampling instant, the calculating filter coefficient module receives
 The output of
The output of register module 404
 Φ
-1(t-1) the output Φ of register module 403
-1(t-1), ask the output Φ of the
Φ
-1(t-1) the output Φ of register module 403
-1(t-1), ask the output Φ of the contrary module 406 of weighted correlation matrix
-1(t), the output X of input signal x (n) sub-band transforms module 401
0, t: X
M-1, t, the output y of desired signal y (n) sub-band transforms module 402
0, t: y
M-1, tAnd the output ω of weights computing module 405
0, t: ω
M-1, t, and be used for calculating current t filter coefficient constantly
 Iterative equation is as follows:
Iterative equation is as follows:
After the upper module connection, the signal data stream flow process is as follows in the channel estimator: be input to input signal x (n) sub-band transforms module 401 and desired signal y (n) sub-band transforms module 402 at t moment signal, carry out sub-band transforms, transformation results outputs to weights computing module 405 and calculates weights.The weights associating Φ that calculates
-1(t-1) output of register module 403 and input signal x (n) sub-band transforms module 401 is input to and asks the contrary module 406 of weighted correlation matrix, calculates weighted correlation coefficient inverse of a matrix matrix.The inverse matrix that calculates outputs to filter coefficient vector computing module 407, is input to after calculating filter coefficient
 Register module
Register module 404 is deposited; Simultaneously, the weighted correlation coefficient matrix inversion matrix of asking the contrary module 406 of weighted correlation matrix to calculate, also input shift register module 403 is deposited.After being updated to next input signal data constantly, repeat above flow process, until the filter coefficient vector that obtains stable optimum
The embodiment of the invention is by the filter tap coefficients vector
 In the
In the transversal filter 202 that constitutes, with input signal sequence X (n=[x (n), x (n-1), L, x (n-L+1)]
TAnd desired signal y (n) carries out sub-band transforms, the process transversal filter
After, again it is carried out the subband inverse transformation, obtain estimated value to desired signal y (n)
 Wherein, because the filter coefficient vector
Be subjected to error
Wherein, because the filter coefficient vector
Be subjected to error
Control can be regulated by self adaptation, finds the filter coefficient vector of one group of optimum to make residual error e (n) infinitely small.
The above-mentioned description to specific embodiment can make those skilled in the art can understand and use the present invention.Person skilled in the art person obviously can make various modifications according to the announcement of these embodiment soon, and needn't pass through performing creative labour being applied in the General Principle of this explanation among other embodiment.Therefore, content of the present invention is not limited to embodiment disclosed herein, and those skilled in the art should be within protection scope of the present invention for improvement and modification that the present invention makes according to announcement of the present invention.
Claims (9)
1, a kind of adaptive filter method is characterized in that adopting following steps:
The first step is carried out sub-band transforms with input signal sequence and desired signal, obtains its projection on M different subspace in complete frequency domain space respectively;
In second step, obtain the weighted value on t moment M subband, the weights on current t moment k subband;
The 3rd goes on foot, and utilizes the weighted correlation coefficient inverse matrix iteration formula in the previous moment, calculates the weighted correlation coefficient inverse matrix of current time;
The 4th goes on foot, and utilizes the weighted correlation coefficient inverse matrix and the filter coefficient vector in the previous moment, tries to achieve current t filter coefficient vector constantly.
2, adaptive filter method according to claim 1 is characterized in that: input signal sequence is with X (n)=[x (n), x (n-1), L, x (n-L+1)]
TExpression, desired signal be with y (n) expression, its in complete frequency domain space the projection on M different subspace respectively with X
0, k: X
M-1, kAnd y
0, t: y
M-1, tExpression; The weights of current t moment k subband are with ω
I, tExpression, and use E|e
I, t|
2Inverse estimate i.e. ω
I, t=1/E|e
I, t|
2The weighted correlation coefficient inverse matrix in the previous moment is with Φ
-1(t-1) expression, the weighted correlation coefficient inverse matrix of current time is with Φ
-1(t) expression, then
The filter coefficient vector in the previous moment with
Expression, current t constantly filter coefficient with
Expression, then;
3, adaptive filter method according to claim 2 is characterized in that: obtaining self adaptation adjustment filter coefficient vector
In the process, the residual error on each subband is
4, according to claim 2 or 3 described adaptive filter methods, it is characterized in that: the cost function WLS of described method is
5, adaptive filter method according to claim 4 is characterized in that: when cost function WLS reaches minimum value, promptly
Obtain frequency domain
Best estimate.
6, a kind of adaptive filter device is characterized in that: arbitrary described method is carried out filtering in the employing claim 1 to 5.
7, adaptive filter device according to claim 6 is characterized in that: comprising: input signal x (n) sub-band transforms module, desired signal y (n) sub-band transforms module, Φ
-1(t-1) register module,
Register module, weights computing module, ask contrary module of weighted correlation matrix and calculating filter coefficient vector module.
8, adaptive filter device according to claim 7, it is characterized in that: the flow process of signal data stream is as follows in this adaptive filter device: be input to input signal x (n) sub-band transforms module 401 and desired signal y (n) sub-band transforms module 402 at t moment signal, carry out sub-band transforms, transformation results outputs to weights computing module 405 and calculates weights; The weights associating Φ that calculates
-1(t-1) output of register module 403 and input signal x (n) sub-band transforms module 401 is input to and asks the contrary module 406 of weighted correlation matrix, calculates weighted correlation coefficient inverse of a matrix matrix; The inverse matrix that calculates outputs to filter coefficient vector computing module 407, is input to after calculating filter coefficient
 Register module 404 is deposited; Simultaneously, the weighted correlation coefficient matrix inversion matrix of asking the contrary module 406 of weighted correlation matrix to calculate, also input shift register module 403 is deposited; After being updated to next input signal data constantly, repeat above flow process, until the filter coefficient vector that obtains stable optimum
Register module 404 is deposited; Simultaneously, the weighted correlation coefficient matrix inversion matrix of asking the contrary module 406 of weighted correlation matrix to calculate, also input shift register module 403 is deposited; After being updated to next input signal data constantly, repeat above flow process, until the filter coefficient vector that obtains stable optimum
9, adaptive filter device according to claim 7 is characterized in that: in this weights computing module, and weights ω
I, tTo obtain step as follows:
Step 1: if t=0, then initialization internal register E|e
I, t-1|
2=1;
Step 2: the residual error e on current t corresponding each subband of i of the moment is obtained in definition according to the subband residual error
I, t, the subband residual error is defined as desired signal y
I, tWith the estimation desired signal
 Between error, expression formula is as follows:
Between error, expression formula is as follows:
Here use previous moment filter coefficient
 To input signal X
I, tFiltering obtains the estimated value of the desired signal of current time
To input signal X
I, tFiltering obtains the estimated value of the desired signal of current time
Step 3: current time subband residual error mould square desired value E|e
I, t|
2With the error current mould square | e
I, t|
2Be multiplied by forgetting factor f, add E|e
I, t-1|
2Be multiplied by 1 with the forgetting factor difference and represent that expression formula is as follows:
E|e
i,t|
2=f|e
i,t|
2+(1-f)E|e
i,t-1|
2
With the desired value E|e that tries to achieve
I, t|
2Deposit internal register in;
Step 4: current t is the weights ω of k subband constantly
I, tUse E|e
I, t|
2Inverse estimate i.e. ω
I, t=1/E|e
I, t|
2
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 200410089454 CN1790902A (en) | 2004-12-13 | 2004-12-13 | Self-adaptive filtering method and device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 200410089454 CN1790902A (en) | 2004-12-13 | 2004-12-13 | Self-adaptive filtering method and device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN1790902A true CN1790902A (en) | 2006-06-21 |
Family
ID=36788469
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN 200410089454 Pending CN1790902A (en) | 2004-12-13 | 2004-12-13 | Self-adaptive filtering method and device |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN1790902A (en) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011000171A1 (en) * | 2009-07-03 | 2011-01-06 | Huawei Technologies Co., Ltd. | Adaptive filter |
| CN102195616A (en) * | 2010-03-02 | 2011-09-21 | 哈曼贝克自动系统股份有限公司 | Efficient sub-band adaptive FIT-filtering |
| CN102281045A (en) * | 2011-04-15 | 2011-12-14 | 深圳大学 | Method for constructing subband self-adapting filter |
| WO2014153732A1 (en) * | 2013-03-27 | 2014-10-02 | 北京印声科技有限公司 | Channel estimating and equalizing method and apparatus for ultrasonic communication |
| CN107243511A (en) * | 2017-06-15 | 2017-10-13 | 宁波宝新不锈钢有限公司 | Cold-strip Steel Surface roughness online detection instrument and its recurrence smooth adaptive filtering method |
| CN107592096A (en) * | 2017-09-29 | 2018-01-16 | 苏州大学 | A kind of robust deviation compensation sef-adapting filter and its filtering method |
| CN108918929A (en) * | 2018-09-11 | 2018-11-30 | 广东石油化工学院 | Power signal adaptive filter method in a kind of load decomposition |
-
2004
- 2004-12-13 CN CN 200410089454 patent/CN1790902A/en active Pending
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8886693B2 (en) | 2009-07-03 | 2014-11-11 | Huawei Technologies Co., Ltd | Efficiently update coefficients of an adaptive filter |
| CN102439930B (en) * | 2009-07-03 | 2014-12-24 | 华为技术有限公司 | Adaptive filter |
| WO2011000171A1 (en) * | 2009-07-03 | 2011-01-06 | Huawei Technologies Co., Ltd. | Adaptive filter |
| CN102195616A (en) * | 2010-03-02 | 2011-09-21 | 哈曼贝克自动系统股份有限公司 | Efficient sub-band adaptive FIT-filtering |
| CN102195616B (en) * | 2010-03-02 | 2014-12-17 | 哈曼贝克自动系统股份有限公司 | Efficient sub-band adaptive FIT-filtering |
| WO2012139357A1 (en) * | 2011-04-15 | 2012-10-18 | 深圳大学 | Method for constructing subband self-adaptive filter |
| CN102281045A (en) * | 2011-04-15 | 2011-12-14 | 深圳大学 | Method for constructing subband self-adapting filter |
| WO2014153732A1 (en) * | 2013-03-27 | 2014-10-02 | 北京印声科技有限公司 | Channel estimating and equalizing method and apparatus for ultrasonic communication |
| CN105052101A (en) * | 2013-03-27 | 2015-11-11 | 张江红 | Channel estimating and equalizing method and apparatus for ultrasonic communication |
| CN107243511A (en) * | 2017-06-15 | 2017-10-13 | 宁波宝新不锈钢有限公司 | Cold-strip Steel Surface roughness online detection instrument and its recurrence smooth adaptive filtering method |
| CN107592096A (en) * | 2017-09-29 | 2018-01-16 | 苏州大学 | A kind of robust deviation compensation sef-adapting filter and its filtering method |
| CN107592096B (en) * | 2017-09-29 | 2020-06-16 | 苏州大学 | Filtering method of robust deviation compensation adaptive filter |
| CN108918929A (en) * | 2018-09-11 | 2018-11-30 | 广东石油化工学院 | Power signal adaptive filter method in a kind of load decomposition |
| CN108918929B (en) * | 2018-09-11 | 2020-12-04 | 广东石油化工学院 | Power signal self-adaptive filtering method in load decomposition |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1130057C (en) | Method and device for blind equalizing of transmission channel effects on digital speech signal | |
| CN1145931C (en) | Signal noise reduction by spectral substration using linear convolution and causal filtering | |
| CN107845389A (en) | A kind of sound enhancement method based on multiresolution sense of hearing cepstrum coefficient and depth convolutional neural networks | |
| CN1150516C (en) | Vector quantizer method | |
| CN110189761B (en) | Single-channel speech dereverberation method based on greedy depth dictionary learning | |
| CN101079266A (en) | Method for realizing background noise suppressing based on multiple statistics model and minimum mean square error | |
| US8229126B2 (en) | Noise error amplitude reduction | |
| CN1164036C (en) | Acoustic echo and noise cancellation | |
| CN1851806A (en) | Adaptive microphone array system and its voice signal processing method | |
| CN1109410C (en) | Signal processing apparatus and method for reducing effects of interference and noise in wireless communications utilizing antenna array | |
| CN1317194A (en) | Digital adaptive filter and acoustic echo canceller using the same | |
| CN1750124A (en) | Bandwidth extension of band limited audio signals | |
| CN1809977A (en) | Method and apparatus for estimating carrier frequency offset and fading rate using autoregressive channel modeling | |
| CN1766994A (en) | Periodic signal enhancement system | |
| CN1277500A (en) | Noise suppressor | |
| CN1750573A (en) | Speech signal processing with combined noise reduction and echo compensation | |
| CN1445752A (en) | Method and device for channel and additivity noise joint compensation in characteristic field | |
| CN1582541A (en) | Method of selecting a subset of antennas among a plurality of antennas in a diversity system | |
| CN1310840A (en) | Signal noise reduction by spectral subtraction using spectrum dependent exponential gain function averaging | |
| CN1790902A (en) | Self-adaptive filtering method and device | |
| CN112634926B (en) | Short wave channel voice anti-fading auxiliary enhancement method based on convolutional neural network | |
| CN113296154A (en) | Method for predicting base expansion frequency modulation synchronous extrusion seismic reservoir | |
| CN1702738A (en) | Subtractive cancellation of harmonic noise | |
| Ashraf et al. | Underwater ambient-noise removing GAN based on magnitude and phase spectra | |
| CN101527036B (en) | Lifting wavelet image de-noising method based on neighborhood windowing |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C41 | Transfer of patent application or patent right or utility model | ||
| TA01 | Transfer of patent application right |
Effective date of registration: 20070330 Address after: No. 2, No. 1588 business building, Union Road, Shanghai, Fujian Applicant after: Jushri Technologies, Inc. Address before: Changning Shanghai Road, No. 1027 Mega building 32 floor Applicant before: Sanghai Radio Communication Research Center |
|
| C02 | Deemed withdrawal of patent application after publication (patent law 2001) | ||
| WD01 | Invention patent application deemed withdrawn after publication |