CN116246224A - Intelligent monitoring device and method for loading and unloading materials - Google Patents
Intelligent monitoring device and method for loading and unloading materials Download PDFInfo
- Publication number
- CN116246224A CN116246224A CN202310513435.5A CN202310513435A CN116246224A CN 116246224 A CN116246224 A CN 116246224A CN 202310513435 A CN202310513435 A CN 202310513435A CN 116246224 A CN116246224 A CN 116246224A
- Authority
- CN
- China
- Prior art keywords
- image
- loading
- hopper
- processor
- module
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000012806 monitoring device Methods 0.000 title claims abstract description 56
- 238000000034 method Methods 0.000 title claims abstract description 32
- 239000000463 material Substances 0.000 title claims description 101
- 238000004891 communication Methods 0.000 claims abstract description 75
- 238000012544 monitoring process Methods 0.000 claims abstract description 32
- 238000010191 image analysis Methods 0.000 claims abstract description 23
- 230000001681 protective effect Effects 0.000 claims description 40
- 239000013077 target material Substances 0.000 claims description 31
- 238000013016 damping Methods 0.000 claims description 10
- 238000004364 calculation method Methods 0.000 description 8
- 238000004458 analytical method Methods 0.000 description 6
- 230000005540 biological transmission Effects 0.000 description 6
- 238000009434 installation Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 240000007651 Rubus glaucus Species 0.000 description 2
- 235000011034 Rubus glaucus Nutrition 0.000 description 2
- 235000009122 Rubus idaeus Nutrition 0.000 description 2
- 239000000428 dust Substances 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012795 verification Methods 0.000 description 2
- 239000002699 waste material Substances 0.000 description 2
- 238000003466 welding Methods 0.000 description 2
- 206010039203 Road traffic accident Diseases 0.000 description 1
- 238000013528 artificial neural network Methods 0.000 description 1
- 238000007405 data analysis Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 230000003137 locomotive effect Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 239000002245 particle Substances 0.000 description 1
- 238000012552 review Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
Images





Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/52—Surveillance or monitoring of activities, e.g. for recognising suspicious objects
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/74—Image or video pattern matching; Proximity measures in feature spaces
- G06V10/761—Proximity, similarity or dissimilarity measures
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B21/00—Alarms responsive to a single specified undesired or abnormal condition and not otherwise provided for
- G08B21/18—Status alarms
- G08B21/24—Reminder alarms, e.g. anti-loss alarms
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
Abstract
The invention relates to the field of dump truck monitoring and discloses a loading and unloading intelligent monitoring device and a loading and unloading intelligent monitoring method, wherein the device comprises a shell, a camera, a processor, a memory, an alarm module, a communication module and a power module; the shell is arranged on the edge of the hopper between the head of the dump truck and the hopper; the camera is semi-embedded on the shell, and the exposed lens of the camera faces to the hopper of the dump truck; the processor, the memory, the communication module and the alarm module are arranged in the shell, and the processor is respectively in communication connection with the memory, the communication module, the alarm module and the camera; the communication module is in communication connection with the cloud platform; the power module is connected with a power output interface of the dump truck, and is respectively connected with the camera, the processor, the memory, the alarm module and the communication module, and the memory is provided with an image analysis module for image similarity comparison. The technical scheme provided by the invention can effectively monitor the problems of material-reducing in the case of stealth, material-misplacing in loading and unloading and the like under the condition of lower cost.
Description
Technical Field
The invention relates to the field of monitoring of dumpers, in particular to an intelligent monitoring device and method for loading and unloading materials.
Background
The existing hydroelectric engineering dumper is generally monitored by manually supervising the unloading in the unloading site. The prior art relies on manual supervision, which not only wastes time and labor, but also has the risks of misjudgment of material-reducing, material-loading and material-unloading.
At present, in order to solve the problems, various sensors, such as a pressure sensor, a gravity sensor, a lifting sensor installed at the lower part of a car hopper, and the like, are usually loaded on the dump truck, on one hand, if the sensors are installed more, the cost price of the dump truck is higher, and in addition, the failure fault risk of the sensors is higher, so that the trouble is brought to later maintenance work. If the sensors are installed less, the automatic monitoring of loading and unloading can not be realized, so a new scheme for effectively monitoring the loading and unloading is needed.
Disclosure of Invention
In view of the above, the embodiment of the invention provides an intelligent monitoring device and method for loading and unloading materials, which can effectively monitor the phenomena of material stealing and reducing, material loading and unloading and the like under the condition of lower cost.
According to a first aspect, an embodiment of the invention provides an intelligent monitoring device for loading and unloading, which comprises a shell, a camera, a processor, a memory, an alarm module, a communication module and a power module; the shell is arranged on the edge of the hopper between the head of the dump truck and the hopper; the camera is semi-embedded on the shell, and the exposed lens of the camera faces to the hopper of the dump truck; the processor, the memory, the communication module and the alarm module are arranged in the shell, and the processor is respectively in communication connection with the memory, the communication module, the alarm module and the camera; an image analysis module is arranged in the memory and used for comparing the image similarity; when the processor runs the image analysis module, a camera is controlled to acquire an image in the direction of a hopper, a loading material image or a hopper image returned by the camera is received, meanwhile, the processor requests a target material image or an empty hopper image from a cloud platform, and then the processor compares the similarity between the loading material image and the target material image to analyze whether loading materials are loaded correctly, or the processor compares the similarity between the hopper image and the empty hopper image to acquire the material height in the hopper image, and further analyzes the full load rate of the dump truck according to the material height to determine whether loading materials are leaked according to the full load rate; the alarm module is used for sending alarm information when receiving an alarm instruction sent by the processor; the power module is connected with a power output interface of the dump truck and is respectively connected with the camera, the processor, the memory, the alarm module and the communication module.
Optionally, the shell further comprises a fixing clip, and for two opposite ends of the fixing clip, one end of the fixing clip is connected with the shell, the other end of the fixing clip is not connected with the shell, and one end of the shell, which is not connected with the fixing clip, is inserted into the edge of the car hopper between the car head and the car hopper.
Optionally, the device further comprises a transparent protective cover and a rotation motor; the rotating motor is arranged in the shell and is respectively connected with the processor and the power supply module; the rotating shaft of the rotating motor extends out of the shell, and the transparent protective cover is connected with the extending rotating shaft and covers the outside of the shell.
Optionally, the device further comprises a transparent protective cover and a vibration motor; a plurality of damping springs are arranged along the side circumference of the shell, the shell is connected with the inner wall of the transparent protective cover through the damping springs, and the transparent protective cover is covered outside the shell; the vibration motor is arranged on the inner side of the transparent protective cover and is respectively connected with the processor and the power supply module through signal lines.
Optionally, the device further comprises a GPS positioning module, which is located inside the housing and is in communication with the processor.
According to a second aspect, an embodiment of the present invention provides a loading and unloading intelligent monitoring method, which is applied to a loading and unloading intelligent monitoring device, and the method includes: establishing communication connection with a cloud platform; when the dump truck arrives at the loading place, acquiring a loading material image, and requesting a target material image from the cloud platform; receiving a target material image sent by the cloud platform, and comparing the similarity between the loading material image and the target material image; if the similarity comparison result represents the loading error, a first alarm message is sent; when the dump truck starts to move, collecting a hopper image of the dump truck, and requesting an empty hopper image from the cloud platform; receiving an empty bucket image sent by the cloud platform, and comparing the empty bucket image with the vehicle bucket image to obtain the height of a material in the vehicle bucket image; and analyzing the full load rate of the dump truck according to the height of the materials in the hopper image, and sending out second alarm information when the full load rate is lower than a first preset threshold value.
Optionally, the method further comprises: when the dumper moves, GPS positioning is carried out on the dumper to obtain dumper positioning information; sending a navigation request to a cloud platform, and receiving loading and unloading route information sent by the cloud platform, wherein the loading and unloading route information is route information returned by the cloud platform based on the navigation request; and analyzing whether the dumper is yawed or not based on the dumper positioning information and the loading and unloading route information, and sending out third alarm information when the dumper is yawed.
Optionally, the method further comprises: when the dump truck reaches a dump site, acquiring a hopper image of the dump truck, and comparing the hopper image with an empty hopper image to acquire the height of materials in the hopper image; and analyzing the unloading rate of the dump truck according to the height of the materials in the hopper image, and sending unloading completion information when the unloading rate is higher than a second preset threshold value.
Optionally, the method further comprises: when the dump truck arrives at the loading place, a rotating motor arranged in the shell body of the intelligent monitoring device for loading and unloading materials is started, so that a rotating shaft of the shell body extends out through the rotating motor, and the transparent protective cover connected to the rotating shaft is rotated.
Optionally, the method further comprises: when the dump truck arrives at the loading place, a vibration motor on the transparent protective cover is started to vibrate the transparent protective cover.
The technical scheme that this application provided has following advantage:
the technical scheme provided by the application provides an intelligent monitoring device for loading and unloading, which comprises a shell, a camera, a processor, a memory, an alarm module, a communication module and a power module; the shell is arranged on the edge of the hopper between the head of the dump truck and the hopper; the camera is semi-embedded on the shell, and the exposed lens of the camera faces to the hopper of the dump truck; the processor, the memory, the communication module and the alarm module are arranged in the shell, and the processor is respectively in communication connection with the memory, the communication module, the alarm module and the camera; an image analysis module is arranged in the memory and used for comparing the image similarity; when the processor runs the image analysis module, the camera is controlled to collect images in the direction of the hopper, and a loading material image or a hopper image returned by the camera is received, meanwhile, the processor requests a target material image or an empty hopper image from the cloud platform, and then the processor compares the similarity between the loading material image and the target material image to analyze whether loading materials are loaded correctly or not, or compares the similarity between the hopper image and the empty hopper image to acquire the height of the materials in the hopper image, and further analyzes the full load rate of the dump truck according to the height of the materials to determine whether the loading materials are leaked or not according to the full load rate; the alarm module is used for sending alarm information when receiving an alarm instruction sent by the processor; the power module is connected with a power output interface of the dump truck and is respectively connected with the camera, the processor, the memory, the alarm module and the communication module. Based on the device that this embodiment provided, if aggregate is full or adorns wrong, processor accessible alarm module in time sends alarm information, reminds the driver to have the problem of loading. On one hand, the automatic supervision of the loading and unloading of the dump truck is realized, on the other hand, the device structure is not complex, and the device can be realized only by common parts such as a core processor, a camera, a communication module and the like, so that the cost of the device is reduced. In addition, the processor can also send the collected image to the cloud platform through the communication module, so that the cloud platform analyzes and judges the image, the processor receives the judging result issued by the cloud platform through the communication module, and the processor does not execute the image analysis step, thereby reducing the calculation power requirement on the processor, adopting a chip with lower price, and further reducing the overall cost of the device.
Drawings
The features and advantages of the present invention will be more clearly understood by reference to the accompanying drawings, which are illustrative and should not be construed as limiting the invention in any way, in which:
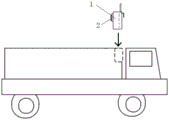
FIG. 1 is a schematic view of an installation position of an intelligent monitoring device for loading and unloading according to an embodiment of the present invention;
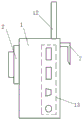
FIG. 2 illustrates a front view of a load intelligent monitoring apparatus in accordance with one embodiment of the present invention;
FIG. 3 illustrates a top view of a load intelligent monitoring apparatus in accordance with one embodiment of the present invention;
FIG. 4 illustrates a right side view of a load intelligent monitoring apparatus in accordance with one embodiment of the present invention;
FIG. 5 illustrates a front perspective view of a load intelligent monitoring apparatus in accordance with one embodiment of the present invention;
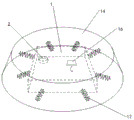
FIG. 6 is a schematic diagram of a loading and unloading intelligent monitoring device according to an embodiment of the invention;
FIG. 7 is a schematic diagram showing another configuration of a loading and unloading intelligent monitoring device according to an embodiment of the present invention;
fig. 8 shows a schematic step diagram of a method for intelligently monitoring loading and unloading according to an embodiment of the invention.
Reference numerals: the wireless digital camera comprises a 1-shell, a 2-camera, a 3-processor, a 4-memory, a 5-alarm module, a 6-communication module, a UPS-power module, a 7-fixing clamp, an 8-GPS positioning module, a 9-SD card, a 10-RAM memory chip, an 11-5G wireless data transmission terminal, a 12-antenna, a 13-data expansion interface, a 14-transparent protective cover, a 15-rotating shaft, a 16-vibration motor and a 17-damping spring.
Detailed Description
For the purpose of making the objects, technical solutions and advantages of the embodiments of the present invention more apparent, the technical solutions of the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention, and it is apparent that the described embodiments are some embodiments of the present invention, but not all embodiments. All other embodiments, based on the embodiments of the invention, which a person skilled in the art would obtain without making any inventive effort, are within the scope of the invention.
Referring to fig. 1 to 5, in one embodiment, an intelligent monitoring device for loading and unloading materials specifically includes a housing 1, a camera 2, a processor 3, a memory 4, an alarm module 5, a communication module 6, and a power module UPS.
Wherein, the shell 1 is arranged on the edge of the car hopper between the head of the dump truck and the car hopper, and the mounting mode comprises but is not limited to bolts, welding and pasting. The camera 2 is half-embedded on one face of casing 1, and when the installation, the one side that does not have camera 2 on the casing 1 is towards the locomotive, and the one side of inlaying camera 2 is towards the car hopper, makes the naked camera lens of camera 2 towards the car hopper of tipper to the camera 2 can gather the complete image of car hopper direction.
The processor 3, the memory 4, the communication module 6 and the alarm module 5 are installed in the shell 1 and integrated on the main board, the processor 3 is respectively in communication connection with the memory 4, the communication module 6, the alarm module 5 and the camera 2, the image analysis module is deployed in the memory 4, the processor 3 is used for operating the image analysis module, the processor 3 controls the communication module 6, the alarm module 5 and the camera 2 through operating the image analysis module, and images acquired by the camera 2 are analyzed through operating the image analysis module.
The processor 3 sends an image acquisition instruction to the camera 2 when running the image analysis module, and the camera 2 is used for acquiring an image in the direction of a car hopper when receiving the image acquisition instruction sent by the processor 3 and sending the acquired image to the processor 3 and the memory 4 so that the processor 3 can analyze the acquired image and the memory 4 can keep the acquired image.
The processor 3 is further configured to analyze the collected image according to a computer instruction and/or send the collected image to the cloud platform through the communication module 6; the communication module 6 is further configured to receive data issued by the cloud platform, where the communication module 6 may be implemented by a 2 g/3 g/4 g wireless communication chip. Based on the principle, the embodiment of the invention can realize two loading and unloading intelligent monitoring flows:
in one embodiment, when the processor runs the image analysis module, the camera is controlled to collect an image in the direction of the hopper, and a loading material image or a hopper image returned by the camera is received, meanwhile, the processor requests a target material image or an empty hopper image from the cloud platform, and then the processor compares the similarity between the loading material image and the target material image to analyze whether loading of the loading material is correct, or the processor compares the similarity between the hopper image and the empty hopper image to acquire the height of the material in the hopper image, and further analyzes the full load rate of the dump truck according to the height of the material to determine whether the loading material is leaked or not according to the full load rate. The application process of the present embodiment may be specifically explained as the following monitoring process one.
Monitoring process one: when the processor 3 receives a signal that the dumper runs to the loading area, the processor 3 controls the camera 2 to collect images of the direction of the hopper, mainly collects images of loading materials and images of the hopper, and the processor 3 requests a target material image of the current loading task from the cloud platform through the communication module 6; the processor 3 compares the loading material image with the target material image through an image recognition algorithm and an image similarity comparison algorithm which are arranged in the memory 4, analyzes whether the currently loaded material is wrong, and if the loading error is found, timely sends an alarm instruction to the alarm module 5, so that the alarm module 5 sends out first alarm information to inform a driver and a loader to stop loading immediately. When the processor 3 receives a signal for confirming starting of the dump truck, the processor 3 requests an empty bucket image of the current dump truck to the cloud platform through the communication module 6, the processor 3 compares the empty bucket image with the empty bucket image through an image recognition algorithm and an image similarity comparison algorithm which are arranged in the memory 4, whether the charge is full or not is analyzed according to the height of the current charge, if the charge is not full, an alarm instruction is timely sent to the alarm module 5, the alarm module 5 sends second alarm information to inform a driver to stop, and the driver returns to a charging place to continue charging.
In addition, in another embodiment, based on the efficacy and the connection mode of the camera, the processor, the memory, the alarm module and the communication module, the second monitoring process can also be implemented, which is explained in detail below.
Monitoring process II: when the processor 3 receives a signal for confirming that the dump truck runs to the loading area, the processor 3 controls the camera 2 to collect images of the direction of the hopper, and mainly collects images of loading materials and the hopper; the processor 3 sends a loading material image to the cloud platform through the communication module 6, so that the cloud platform compares the loading material image with a target material image stored by the cloud platform based on an image recognition algorithm and an image similarity comparison algorithm preset by the cloud platform, whether the currently loaded material is wrong or not is analyzed, if the loading error is found, the cloud platform timely returns loading error information to the communication module 6, the communication module 6 forwards the loading error information to the processor 3, the processor 3 sends an alarm instruction to the alarm module 5 according to the loading error information, the alarm module 5 sends first alarm information, a driver and a charger are notified, and loading is stopped immediately. When the processor 3 receives a starting signal of the dump truck, the processor 3 sends a hopper image to the cloud platform through the communication module 6, the cloud platform compares the hopper image with an empty hopper image stored by the processor based on an image recognition algorithm and an image similarity comparison algorithm which are preset by the processor, whether the charge is full or not is analyzed according to the current charge height, if the charge is found to be full, the cloud platform timely returns the charge dissatisfaction information to the communication module 6, the communication module 6 forwards the charge dissatisfaction information to the processor 3, the processor 3 sends an alarm instruction to the alarm module 5 according to the charge dissatiaction information, and then the alarm module 5 sends a second alarm information to inform a driver to stop the vehicle and returns to a charge place to continue charging.
In the embodiment of the invention, the processor 3 can select embedded processors such as raspberry pie and STM32 with lower price, and can also select processors such as ARM9 series and x86 series with higher calculation power. If the produced loading and unloading intelligent monitoring device is in pursuit of lower cost, a processor with lower cost such as raspberry pie and STM32 is selected, and considering that the calculation power of the processor is not high, the calculation and analysis tasks can be completed by the cloud platform with strong calculation power through the method flow provided in the monitoring flow II, and the timeliness of a small part of intelligent monitoring device is sacrificed by receiving the analysis result now loading and unloading automatic supervision returned by the cloud platform. If the produced loading and unloading intelligent monitoring device is in pursuit of higher alarm timeliness, ARM9 series, x86 series and other processors with higher prices are selected, calculation and analysis tasks can be locally finished by the method flow provided in the first monitoring flow, so that the waste of communication time is reduced, and the timeliness of alarm is improved.
Specifically, the alarm module 5 includes, but is not limited to, a voice alarm, an alarm light, to alert the driver by voice and light to check for a wrong or underfilling problem.
Specifically, in an embodiment, the alarm module 5 may adopt a voice alarm, and correspondingly, the casing 1 further includes an opening, where the position of the opening corresponds to the installation position of the voice alarm in the casing 1, so that the voice broadcast signal of the voice alarm propagates outwards through the opening, and the voice is clearer.
In addition, in this embodiment, after the alarm module 5 alarms, the driver is required to manually trigger a stop button on the loading and unloading intelligent monitoring device to stop the alarm, if the processor 3 monitors that the driver has not triggered the stop button for three times of continuous alarm at the alarm module 5, the processor 3 will send a reminding request to the cloud platform, so that the cloud platform sends a reminding short message to the mobile phone of the driver.
In addition, the power supply module UPS provided by the embodiment of the present invention is connected to a power output interface of the dump truck, and is connected to the camera 2, the processor 3, the memory 4, the alarm module 5 and the communication module 6 through the motherboard in the housing 1. Therefore, the loading and unloading intelligent monitoring device is connected into a power supply circuit of the dump truck, additional battery loading is not needed, and the problem that the loading and unloading intelligent monitoring device stops working due to the fact that the battery is not conductive is avoided.
Specifically, as shown in fig. 2 and 3, in an embodiment, the housing 1 further includes a fixing clip 7, where two opposite ends of the fixing clip 7 are located, and one end is connected to the housing 1, and the other end is not connected to the housing 1, where the connection manner includes, but is not limited to, adhesion, welding, riveting, and bolting. Therefore, one end of the shell 1, which is not connected with the shell 1 through the fixing clip 7, is inserted downwards on the edge of the car hopper between the car head and the car hopper, the end, which is connected with the shell 1, of the fixing clip 7 is inserted into the position, which is propped against the edge of the car hopper, and the end, which is connected with the shell 1, of the fixing clip 7 enables an interactive clamping force to be generated between the fixing clip 7 and the shell 1, and the clamping force acts on the edge of the car hopper in the middle, so that the intelligent monitoring device for loading and unloading materials can be firmly installed on the dump truck. When the device needs to be maintained and replaced, the device only needs to be pulled out from the edge of the car hopper, other tools are not needed, and time and labor are saved in operation.
Specifically, in an embodiment, the loading and unloading intelligent monitoring device provided by the embodiment of the invention further comprises a GPS positioning module 8, wherein the GPS positioning module 8 is located inside the casing 1, is installed on a main board, and is in communication connection with the processor 3. In the embodiment, a GPS positioning module 8 is used for navigating a driver according to a cloud platform planning path. The position of the dumper can be monitored in real time through the GPS positioning module 8, and when the dumper is deviated in path or has temporary other tasks, the processor 3 can send out alarm information through the alarm module 5 to prompt a driver to run according to a correct route, so that the dumper can be managed and controlled in a finer mode.
Specifically, in an embodiment, the memory 4 provided in the embodiment of the present invention specifically includes an SD card 9 and a RAM memory chip 10, where the RAM memory chip 10 is used to read and cache computer instructions from the SD card 9, and when the processor 3 executes a command, the cache instructions are directly read from the RAM memory chip 10, so that instruction codes such as a control instruction, a navigation instruction, an image analysis instruction, etc. are more stable to run and the reading speed is faster. When the navigation instruction, the control instruction or the image analysis instruction on the cloud platform is changed, the cloud platform can send the latest instruction to the communication module 6, and the communication module 6 replaces the old instruction in the SD card 9 by the latest instruction, so that the system of the loading and unloading intelligent monitoring device is automatically updated. The SD card 9 is further configured to store data other than computer instructions, including, but not limited to, image data collected by the camera 2, a target material image issued by the cloud platform, and an empty bucket image, and if a dump truck has a traffic accident, the SD card 9 in the device can be taken out for quick copying, thereby realizing quick review and analysis of an accident scene.
Specifically, in an embodiment, the communication module 6 specifically includes a 5G wireless data transmission terminal 11 (5G Data Transfer Unit,5G DTU) and an antenna 12,5G, where the wireless data transmission terminal 11 is located inside the housing 1, and is used as a connection carrier between a 5G network and industry equipment, and the 5G capability provided by the 5G wireless data transmission terminal 11 can bring great improvement to multiple vertical industries such as internet of vehicles, industrial internet, etc., reduce the difficulty of terminal development, enrich the selection of industrial field devices, build customizing capability, and break through the boundary of industry terminal capability by assistance. Therefore, the embodiment realizes the communication connection between the device and the cloud platform based on the 5G communication technology, can obviously improve the transmission speed of image data and image analysis results, and enables the alarm to be more timely. The antenna 12 is connected to the 5G wireless data transmission terminal 11, and the antenna 12 is located outside the housing 1 and extends above the installation position, so as to further enhance the communication signal of the device.
Specifically, in an embodiment, the casing 1 further includes a plurality of data expansion interfaces 13, where the data expansion interfaces 13 are communicatively connected to the processor 3, and the data expansion interfaces 13 include, but are not limited to, a USB interface, a serial interface, a parallel interface, and a Type-C interface, so as to improve the capability of debugging the material loading and unloading intelligent monitoring device from the outside.
Specifically, as shown in fig. 6, in an embodiment, the loading and unloading intelligent monitoring device provided by the embodiment of the invention further includes a transparent protective cover 14 and a rotation motor; the rotating motor is arranged in the shell 1 and is respectively connected with the processor 3 and the power supply module UPS; the rotating shaft 15 of the rotating motor extends out of the shell 1, and the transparent protective cover 14 is connected with the extending rotating shaft 15 and covers the outside of the shell 1.
Specifically, considering that dust emission usually occurs during loading of materials, the camera 2 of the intelligent monitoring device is easy to be dirty, and the monitoring effect is affected. To solve this problem, in the embodiment of the present invention, a transparent protective cover 14 is added to the exterior of the intelligent monitoring apparatus, a rotation motor is installed in the intelligent monitoring apparatus, and a rotation shaft 15 of the rotation motor may extend out of the housing 1 of the intelligent monitoring apparatus and extend onto the transparent protective cover 14. The position where the rotation shaft 15 extends only needs not to block the camera 2, and the rotation shaft 15 may be at the center of the housing 1 or slightly deviate from the center, which is not particularly limited in the embodiment of the present invention, and the rotation shaft 15 is taken as an example at the center of the housing 1 in fig. 6. When the large truck is loaded and unloaded, the intelligent monitoring device starts the rotating motor through the processor 3, so that the transparent protective cover 14 rotates through the rotating shaft 15. Because of the transparent nature of the transparent protective cover 14, the shooting of the camera 2 is not affected. When the transparent protective cover 14 rotates, the dirty ash is thrown out by the gravity of the dirty ash and the centrifugal force generated by rotation, so that the dirty ash is prevented from adhering to the protective cover. In this way, the photographing of the camera 2 is not affected, and the camera 2 can be stably and effectively prevented from becoming dirty.
Specifically, as shown in fig. 7, in another embodiment, the loading and unloading intelligent monitoring device provided by the embodiment of the invention further includes a transparent protective cover 14 and a vibration motor 16; a plurality of damping springs 17 are arranged along the side circumference of the shell 1, the shell 1 is connected with the inner wall of the transparent protective cover 14 through the damping springs 17, and the transparent protective cover 14 is covered outside the shell 1; the vibration motor 16 is installed inside the transparent protection cover 14 and is connected to the processor 3 and the power module by lines passing through the housing 1, respectively.
Specifically, in this embodiment, a circle of damping springs 17 is externally installed on the casing 1 of the intelligent monitoring device, and the damping springs 17 are connected with the inner wall of the transparent protective cover 14, so that the transparent protective cover 14 can be hung outside the intelligent monitoring device. Then, a vibration motor 16 is installed on the inner side of the transparent protective cover 14, the vibration motor 16 is respectively connected with a processor 3 and a power supply module UPS in the intelligent monitoring device through signal lines, the processor 3 is used for starting the vibration motor 16, and the power supply module UPS is used for supplying power to the vibration motor 16. When the large truck is loaded and unloaded, the processor 3 starts the vibration motor 16, so that dust cannot be attached to the transparent protective cover 14 under the condition of vibration, and the transparent protective cover 14 and the intelligent monitoring device are connected through the damping spring 17, so that the vibration generated by the transparent protective cover 14 cannot be transmitted to the intelligent monitoring device, the camera 2 cannot vibrate, and normal shooting of the intelligent monitoring device cannot be affected. The normal shooting of the camera 2 is likewise not affected on the basis of the transparency property of the transparent protective cover 14.
Through the cooperation of the components, the technical scheme provided by the application provides an intelligent monitoring device for loading and unloading, which comprises a shell, a camera, a processor, a memory, an alarm module, a communication module and a power module; the shell is arranged on the edge of the hopper between the head of the dump truck and the hopper; the camera is semi-embedded on the shell, and the exposed lens of the camera faces to the hopper of the dump truck; the processor, the memory, the communication module and the alarm module are arranged in the shell, and the processor is respectively in communication connection with the memory, the communication module, the alarm module and the camera; an image analysis module is arranged in the memory and used for comparing the image similarity; when the processor runs the image analysis module, the camera is controlled to collect images in the direction of the hopper, and a loading material image or a hopper image returned by the camera is received, meanwhile, the processor requests a target material image or an empty hopper image from the cloud platform, and then the processor compares the similarity between the loading material image and the target material image to analyze whether loading materials are loaded correctly or not, or compares the similarity between the hopper image and the empty hopper image to acquire the height of the materials in the hopper image, and further analyzes the full load rate of the dump truck according to the height of the materials to determine whether the loading materials are leaked or not according to the full load rate; the alarm module is used for sending alarm information when receiving an alarm instruction sent by the processor; the power module is connected with a power output interface of the dump truck and is respectively connected with the camera, the processor, the memory, the alarm module and the communication module. Based on the device that this embodiment provided, if aggregate is full or adorns wrong, processor accessible alarm module in time sends alarm information, reminds the driver to have the problem of loading. On one hand, the automatic supervision of the loading and unloading of the dump truck is realized, on the other hand, the device structure is not complex, and the device can be realized only by common parts such as a core processor, a camera, a communication module and the like, so that the cost of the device is reduced. In addition, the processor can also send the collected image to the cloud platform through the communication module, so that the cloud platform analyzes and judges the image, the processor receives the judging result issued by the cloud platform through the communication module, and the processor does not execute the image analysis step, thereby reducing the calculation power requirement on the processor, adopting a chip with lower price, and further reducing the overall cost of the device.
As shown in fig. 8, in an embodiment of the present invention, a method for intelligently monitoring loading and unloading materials is further provided, which is applied to the loading and unloading material intelligent monitoring device provided by the foregoing device embodiment, and specifically includes the following steps:
step S101: and establishing communication connection with the cloud platform.
Step S102: and after the dump truck reaches the loading place, acquiring a loading material image, and requesting a target material image from the cloud platform.
Step S103: and receiving the target material image sent by the cloud platform, and comparing the similarity between the loading material image and the target material image.
Step S104: and if the similarity comparison result represents the loading error, sending out first alarm information.
Step S105: when the dump truck starts to move, collecting a hopper image of the dump truck, and requesting an empty hopper image from the cloud platform.
Step S106: and receiving the empty bucket image sent by the cloud platform, and comparing the empty bucket image with the hopper image to obtain the height of the material in the hopper image.
Step S107: and analyzing the full load rate of the dump truck according to the height of the materials in the hopper image, and sending out second alarm information when the full load rate is lower than a first preset threshold value.
Specifically, the method for intelligently monitoring the loading and unloading materials provided by the embodiment of the invention corresponds to the first monitoring flow in the embodiment of the device. After the loading and unloading intelligent monitoring device is mounted on the dump truck, communication connection is established between the loading and unloading intelligent monitoring device and the cloud platform through the communication module, so that the loading and unloading intelligent monitoring device is ensured to normally operate and normally communicate with the network. When the dump truck arrives at the loading place, the device collects loading material images through the camera, and simultaneously requests target material images from the cloud platform. The cloud platform returns a target material image corresponding to the current loading task according to the request of the loading and unloading intelligent monitoring device, and after the loading and unloading intelligent monitoring device receives the target material image sent by the cloud platform, the loading material image and the target material image are subjected to field comparison, and whether the loading material is consistent with the task material or not is analyzed, wherein the color, the particle size, the surface texture and the like of the material are included. The image similarity comparison algorithm for the operation of the loading and unloading intelligent monitoring device is preset in an SD card of the device, for example: the convolution neural network can be adopted to extract the characteristics of the two images, then similarity analysis is carried out on the two images based on the square error of the pixel values of the images and the square root error of the pixel values of the images, so that the material similarity of the two images is obtained, the image similarity analysis algorithm related to the embodiment is the prior art, and the specific principle is not repeated here. And if the similarity of the materials in the target material image and the loading material image is more than 95%, checking. If the similarity of the target material image and the loading material image is less than 95%, the first alarm information is sent out through the alarm module without verification, and a driver is informed to further carry out manual verification to confirm whether the materials are correct.
After loading is finished, when a driver starts the dump truck and starts moving, the loading and unloading intelligent monitoring device collects a hopper image of the dump truck through the camera and requests an empty hopper image from the cloud platform. And the cloud platform responds to the request sent by the intelligent loading and unloading monitoring device and returns the empty bucket image of the dump truck of the current model to the intelligent loading and unloading monitoring device. After receiving the empty hopper image, the loading and unloading intelligent monitoring device compares and analyzes the hopper image and the empty hopper image through an image recognition algorithm (the embodiment adopts a common target recognition algorithm, such as a YOLO series algorithm, the specific content of which is the prior art and is not described in detail herein), for example, acquires a material target in the hopper image through the target recognition algorithm, then compares the material target in the hopper image with the empty hopper image, calculates the height of the material in the hopper image, and further calculates the full load rate of the dump truck. And if the full load rate is not lower than the first preset threshold (for example, 95%), checking to pass, and if the full load rate is lower than the first preset threshold (for example, 95%), sending out second alarm information to remind a driver to stop, and returning to the charging place to continue charging. Through the steps, the embodiment realizes automatic supervision of loading and unloading of the dumper.
Specifically, in an embodiment, the method for intelligently monitoring the loading and unloading materials provided by the embodiment of the invention further comprises the following steps:
step one: and when the dumper moves, GPS positioning is carried out on the dumper to obtain dumper positioning information.
Step two: and sending a navigation request to the cloud platform, and receiving loading and unloading route information sent by the cloud platform, wherein the loading and unloading route information is route information returned by the cloud platform based on the navigation request.
Step three: and analyzing whether the dump truck is yawed or not based on the dump truck positioning information and the loading and unloading route information, and sending out third alarm information when the dump truck is yawed.
Specifically, in this embodiment, based on the GPS positioning module, the loading and unloading intelligent monitoring device may also report information such as the position, speed, head orientation, and whether loading of the dump truck is performed when the device is started. If the dumper is not loaded with cargoes, the cloud platform can arrange the nearest material point position according to the position of the dumper and send a transportation task to the loading and unloading intelligent monitoring device, wherein the transportation task comprises a material name, a loading place, a unloading place and the like. After receiving the task, the intelligent loading and unloading monitoring device is connected to the voice system and the navigation system of the cab of the dump truck to guide a driver to drive to a destination point. When the dumper moves, the GPS positioning module performs GPS positioning on the dumper in real time to obtain dumper positioning information. And a navigation request is sent to the cloud platform so as to receive loading and unloading route information returned by the cloud platform, then the loading and unloading intelligent monitoring device analyzes whether the dumper is yawed or not based on the dumper positioning information and the loading and unloading route information, and if the driving route of a driver is yawed, a third alarm message is sent out when the dumper is yawed through the alarm module, so that the driver is reminded to return to the correct route, and the dumper is conveniently and finely managed and controlled.
Specifically, in an embodiment, the method for intelligently monitoring the loading and unloading materials provided by the embodiment of the invention further comprises the following steps:
step four: when the dump truck arrives at the dump site, the hopper image of the dump truck is acquired, and the hopper image and the empty hopper image are compared to acquire the height of the materials in the hopper image.
Step five: and analyzing the unloading rate of the dump truck according to the height of the materials in the hopper image, and sending unloading completion information when the unloading rate is higher than a second preset threshold value.
Specifically, when the dump truck arrives at a dumping site, dumping is monitored on the basis of the dumping rate, whether the materials are completely dumped or not is analyzed, and when the dumping rate is higher than a second preset threshold value, the materials are considered to be dumped completely, dumping completion information is sent out, and a driver is reminded of carrying out the next transportation task. Specifically, the principle of analyzing the discharge rate according to the hopper image in this embodiment is the same as that in steps S105 to S107, and the detailed explanation can refer to the related description of the foregoing embodiment, which is not repeated here.
Specifically, in an embodiment, the method for intelligently monitoring the loading and unloading materials provided by the embodiment of the invention further comprises the following steps:
step six: when the dump truck arrives at the loading place, a rotating motor arranged in the shell body of the intelligent monitoring device for loading and unloading materials is started, so that a rotating shaft of the shell body extends out of the rotating motor, and a transparent protective cover connected to the rotating shaft is rotated.
Specifically, the explanation of the principle of the loading and unloading intelligent monitoring method provided in this embodiment refers to the related description of the foregoing loading and unloading intelligent monitoring device embodiment, and is not repeated herein.
Specifically, in an embodiment, the method for intelligently monitoring the loading and unloading materials provided by the embodiment of the invention further comprises the following steps:
step seven: when the dump truck arrives at the loading place, a vibration motor on the transparent protective cover is started to vibrate the transparent protective cover.
Specifically, the explanation of the principle of the loading and unloading intelligent monitoring method provided in this embodiment refers to the related description of the foregoing loading and unloading intelligent monitoring device embodiment, and is not repeated herein.
Through the steps, the technical scheme provided by the application provides an intelligent monitoring device for loading and unloading materials, which comprises a shell, a camera, a processor, a memory, an alarm module, a communication module and a power module; the shell is arranged on the edge of the hopper between the head of the dump truck and the hopper; the camera is semi-embedded on the shell, and the exposed lens of the camera faces to the hopper of the dump truck; the processor, the memory, the communication module and the alarm module are arranged in the shell, and the processor is respectively in communication connection with the memory, the communication module, the alarm module and the camera; an image analysis module is arranged in the memory and used for comparing the image similarity; when the processor runs the image analysis module, the camera is controlled to collect images in the direction of the hopper, and a loading material image or a hopper image returned by the camera is received, meanwhile, the processor requests a target material image or an empty hopper image from the cloud platform, and then the processor compares the similarity between the loading material image and the target material image to analyze whether loading materials are loaded correctly or not, or compares the similarity between the hopper image and the empty hopper image to acquire the height of the materials in the hopper image, and further analyzes the full load rate of the dump truck according to the height of the materials to determine whether the loading materials are leaked or not according to the full load rate; the alarm module is used for sending alarm information when receiving an alarm instruction sent by the processor; the power module is connected with a power output interface of the dump truck and is respectively connected with the camera, the processor, the memory, the alarm module and the communication module. Based on the device that this embodiment provided, if aggregate is full or adorns wrong, processor accessible alarm module in time sends alarm information, reminds the driver to have the problem of loading. On one hand, the automatic supervision of the loading and unloading of the dump truck is realized, on the other hand, the device structure is not complex, and the device can be realized only by common parts such as a core processor, a camera, a communication module and the like, so that the cost of the device is reduced. In addition, the processor can also send the collected image to the cloud platform through the communication module, so that the cloud platform analyzes and judges the image, the processor receives the judging result issued by the cloud platform through the communication module, and the processor does not execute the image analysis step, thereby reducing the calculation power requirement on the processor, adopting a chip with lower price, and further reducing the overall cost of the device.
Although embodiments of the present invention have been described in connection with the accompanying drawings, various modifications and variations may be made by those skilled in the art without departing from the spirit and scope of the invention, and such modifications and variations are within the scope of the invention as defined by the appended claims.
Claims (10)
1. The intelligent monitoring device for loading and unloading is characterized by comprising a shell, a camera, a processor, a memory, an alarm module, a communication module and a power module;
the shell is arranged on the edge of the hopper between the head of the dump truck and the hopper;
the camera is semi-embedded on the shell, and the exposed lens of the camera faces to the hopper of the dump truck;
the processor, the memory, the communication module and the alarm module are arranged in the shell, and the processor is respectively in communication connection with the memory, the communication module, the alarm module and the camera;
an image analysis module is arranged in the memory and used for comparing the image similarity; when the processor runs the image analysis module, a camera is controlled to acquire an image in the direction of a hopper, a loading material image or a hopper image returned by the camera is received, meanwhile, the processor requests a target material image or an empty hopper image from a cloud platform, and then the processor compares the similarity between the loading material image and the target material image to analyze whether loading materials are loaded correctly, or the processor compares the similarity between the hopper image and the empty hopper image to acquire the material height in the hopper image, and further analyzes the full load rate of the dump truck according to the material height to determine whether loading materials are leaked according to the full load rate;
the alarm module is used for sending alarm information when receiving an alarm instruction sent by the processor;
the power module is connected with a power output interface of the dump truck and is respectively connected with the camera, the processor, the memory, the alarm module and the communication module.
2. The device of claim 1, wherein the housing further comprises a retaining clip, wherein for opposite ends of the retaining clip, one end is connected to the housing and the other end is not connected to the housing, and the housing is plugged onto a hopper edge between the hopper and the head through the unconnected end of the retaining clip.
3. The device of claim 1, further comprising a transparent protective cover and a rotation motor; the rotating motor is arranged in the shell and is respectively connected with the processor and the power supply module; the rotating shaft of the rotating motor extends out of the shell, and the transparent protective cover is connected with the extending rotating shaft and covers the outside of the shell.
4. The device of claim 1, further comprising a transparent protective cover and a vibration motor; a plurality of damping springs are arranged along the side circumference of the shell, the shell is connected with the inner wall of the transparent protective cover through the damping springs, and the transparent protective cover is covered outside the shell; the vibration motor is arranged on the inner side of the transparent protective cover and is respectively connected with the processor and the power supply module through signal lines.
5. The device of claim 1, further comprising a GPS positioning module located within the housing and communicatively coupled to the processor.
6. The intelligent monitoring method for loading and unloading materials is characterized by being applied to an intelligent monitoring device for loading and unloading materials, and comprises the following steps:
establishing communication connection with a cloud platform;
when the dump truck arrives at the loading place, acquiring a loading material image, and requesting a target material image from the cloud platform;
receiving a target material image sent by the cloud platform, and comparing the similarity between the loading material image and the target material image;
if the similarity comparison result represents the loading error, a first alarm message is sent;
when the dump truck starts to move, collecting a hopper image of the dump truck, and requesting an empty hopper image from the cloud platform;
receiving an empty bucket image sent by the cloud platform, and comparing the empty bucket image with the vehicle bucket image to obtain the height of a material in the vehicle bucket image;
and analyzing the full load rate of the dump truck according to the height of the materials in the hopper image, and sending out second alarm information when the full load rate is lower than a first preset threshold value.
7. The method of claim 6, wherein the method further comprises:
when the dumper moves, GPS positioning is carried out on the dumper to obtain dumper positioning information;
sending a navigation request to a cloud platform, and receiving loading and unloading route information sent by the cloud platform, wherein the loading and unloading route information is route information returned by the cloud platform based on the navigation request;
and analyzing whether the dumper is yawed or not based on the dumper positioning information and the loading and unloading route information, and sending out third alarm information when the dumper is yawed.
8. The method of claim 6, wherein the method further comprises:
when the dump truck reaches a dump site, acquiring a hopper image of the dump truck, and comparing the hopper image with an empty hopper image to acquire the height of materials in the hopper image;
and analyzing the unloading rate of the dump truck according to the height of the materials in the hopper image, and sending unloading completion information when the unloading rate is higher than a second preset threshold value.
9. The method of claim 8, wherein the method further comprises:
when the dump truck arrives at the loading place, a rotating motor arranged in the shell body of the intelligent monitoring device for loading and unloading materials is started, so that a rotating shaft of the shell body extends out through the rotating motor, and the transparent protective cover connected to the rotating shaft is rotated.
10. The method of claim 8, wherein the method further comprises:
when the dump truck arrives at the loading place, a vibration motor on the transparent protective cover is started to vibrate the transparent protective cover.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202310513435.5A CN116246224A (en) | 2023-05-09 | 2023-05-09 | Intelligent monitoring device and method for loading and unloading materials |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202310513435.5A CN116246224A (en) | 2023-05-09 | 2023-05-09 | Intelligent monitoring device and method for loading and unloading materials |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN116246224A true CN116246224A (en) | 2023-06-09 |
Family
ID=86628141
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202310513435.5A Pending CN116246224A (en) | 2023-05-09 | 2023-05-09 | Intelligent monitoring device and method for loading and unloading materials |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN116246224A (en) |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN207865127U (en) * | 2017-12-29 | 2018-09-14 | 海南金渔创新科技有限公司 | A kind of wall lamp with superhigh radiating and with defencive function |
| CN111460911A (en) * | 2020-03-12 | 2020-07-28 | 陕西天诚软件有限公司 | Material loading method, material loading device, server and medium |
| CN113291255A (en) * | 2020-02-06 | 2021-08-24 | 小马智行 | Rotary glass sensor cleaning system and method of operation |
| CN113618918A (en) * | 2021-08-31 | 2021-11-09 | 北京太平洋水泥制品有限公司 | Method and device for comprehensively judging and processing material properties in mixer truck |
| CN216527503U (en) * | 2021-12-24 | 2022-05-13 | 许博 | Fire scene monitor based on imaging device |
| CN114604766A (en) * | 2022-01-24 | 2022-06-10 | 杭州大杰智能传动科技有限公司 | Material stacking space image recognition analysis method and device for intelligent tower crane |
| CN114604787A (en) * | 2022-01-24 | 2022-06-10 | 杭州大杰智能传动科技有限公司 | Automatic material characteristic identification method and device for unmanned intelligent tower crane |
-
2023
- 2023-05-09 CN CN202310513435.5A patent/CN116246224A/en active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN207865127U (en) * | 2017-12-29 | 2018-09-14 | 海南金渔创新科技有限公司 | A kind of wall lamp with superhigh radiating and with defencive function |
| CN113291255A (en) * | 2020-02-06 | 2021-08-24 | 小马智行 | Rotary glass sensor cleaning system and method of operation |
| CN111460911A (en) * | 2020-03-12 | 2020-07-28 | 陕西天诚软件有限公司 | Material loading method, material loading device, server and medium |
| CN113618918A (en) * | 2021-08-31 | 2021-11-09 | 北京太平洋水泥制品有限公司 | Method and device for comprehensively judging and processing material properties in mixer truck |
| CN216527503U (en) * | 2021-12-24 | 2022-05-13 | 许博 | Fire scene monitor based on imaging device |
| CN114604766A (en) * | 2022-01-24 | 2022-06-10 | 杭州大杰智能传动科技有限公司 | Material stacking space image recognition analysis method and device for intelligent tower crane |
| CN114604787A (en) * | 2022-01-24 | 2022-06-10 | 杭州大杰智能传动科技有限公司 | Automatic material characteristic identification method and device for unmanned intelligent tower crane |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1170714B1 (en) | Communication device of mobile unit | |
| US20180229744A1 (en) | Engine monitoring and maintenance dispatch system | |
| CN110991328B (en) | System and method for managing loading of excavator and engineering transport vehicle in construction process | |
| CN109890682A (en) | Autonomous vehicle is checked using unmanned aviation carrier | |
| US20050256681A1 (en) | Metering device and process to record engine hour data | |
| EP2226778A1 (en) | A saving power system and method for managing communication of a moving object | |
| CN102773922B (en) | Feeding control system, concrete agitating lorry and loading and unloading monitoring method, system and material anti-theft system of concrete agitating lorry | |
| CN102773921A (en) | Concrete mixer truck and operation method and system by matching concrete mixer truck with concrete pumping equipment | |
| WO2014184543A1 (en) | Driving event notification | |
| CN110834563A (en) | Battery replacement detection method and detection device for new energy automobile battery replacement station | |
| EP2241972A1 (en) | Rewrite control apparatus for onboard program | |
| CN106791652A (en) | A kind of vehicle-mounted transport monitoring system | |
| JP2010114588A (en) | Method of reporting accident situation using cellular phone terminal, cellular phone terminal having accident information reporting function, and program | |
| CN115567892A (en) | Shared electric bicycle control method based on 4G intelligent central control device | |
| CN103414599A (en) | Image acquisition system based on remote data transmission | |
| CN116246224A (en) | Intelligent monitoring device and method for loading and unloading materials | |
| CN113743793A (en) | Unloading and dispatching method and system for trucks in strip mine refuse dump | |
| CN202781437U (en) | Concrete mixer and matched operation system of concrete mixer and concrete pumping equipment | |
| JP2002290596A (en) | Motion recorder for machine, and monitoring system for machine | |
| KR101321415B1 (en) | System and method for receiving vehicle driving information using mobile terminal | |
| KR102237932B1 (en) | Inspection support system for construction machine, management server, and inspection report creation system | |
| KR101036268B1 (en) | Method for calculating car insurance | |
| CN114005189A (en) | Parking charging method, device and system, parking management platform and storage medium | |
| CN214409302U (en) | Novel tunnel fault car detects device | |
| JP2009025244A (en) | Vehicle controller |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| RJ01 | Rejection of invention patent application after publication |
Application publication date: 20230609 |