CN115885617A - 一种基于机器视觉的甘蔗全方位检测取芽装置 - Google Patents
一种基于机器视觉的甘蔗全方位检测取芽装置 Download PDFInfo
- Publication number
- CN115885617A CN115885617A CN202211490718.4A CN202211490718A CN115885617A CN 115885617 A CN115885617 A CN 115885617A CN 202211490718 A CN202211490718 A CN 202211490718A CN 115885617 A CN115885617 A CN 115885617A
- Authority
- CN
- China
- Prior art keywords
- sugarcane
- bud
- cutting
- machine vision
- device based
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 240000000111 Saccharum officinarum Species 0.000 title claims abstract description 204
- 235000007201 Saccharum officinarum Nutrition 0.000 title claims abstract description 204
- 238000001514 detection method Methods 0.000 title claims abstract description 25
- 230000007246 mechanism Effects 0.000 claims abstract description 171
- 238000005520 cutting process Methods 0.000 claims abstract description 60
- 238000003860 storage Methods 0.000 claims description 33
- 239000000463 material Substances 0.000 claims description 16
- 238000000034 method Methods 0.000 claims description 13
- 230000007723 transport mechanism Effects 0.000 claims description 9
- 230000000903 blocking effect Effects 0.000 claims description 8
- 230000008569 process Effects 0.000 claims description 8
- 230000033001 locomotion Effects 0.000 claims description 6
- 238000009434 installation Methods 0.000 claims description 3
- 238000012545 processing Methods 0.000 abstract description 5
- 238000004519 manufacturing process Methods 0.000 description 10
- 230000008901 benefit Effects 0.000 description 4
- 230000005484 gravity Effects 0.000 description 4
- 230000006870 function Effects 0.000 description 3
- 238000005192 partition Methods 0.000 description 3
- 238000012549 training Methods 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 238000002372 labelling Methods 0.000 description 2
- 241000196324 Embryophyta Species 0.000 description 1
- CZMRCDWAGMRECN-UGDNZRGBSA-N Sucrose Chemical compound O[C@H]1[C@H](O)[C@@H](CO)O[C@@]1(CO)O[C@@H]1[C@H](O)[C@@H](O)[C@H](O)[C@@H](CO)O1 CZMRCDWAGMRECN-UGDNZRGBSA-N 0.000 description 1
- 229930006000 Sucrose Natural products 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000013135 deep learning Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000012840 feeding operation Methods 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- 230000008676 import Effects 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 239000002689 soil Substances 0.000 description 1
- 229960004793 sucrose Drugs 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 238000012795 verification Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
- 239000002699 waste material Substances 0.000 description 1
Images




Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P60/00—Technologies relating to agriculture, livestock or agroalimentary industries
- Y02P60/20—Reduction of greenhouse gas [GHG] emissions in agriculture, e.g. CO2
- Y02P60/21—Dinitrogen oxide [N2O], e.g. using aquaponics, hydroponics or efficiency measures
Abstract
本发明涉及一种基于机器视觉的甘蔗全方位检测取芽装置,属于农产品加工自动化技术领域;所述机架对应设置有用于输送甘蔗的上料机构,机架上安装有连接驱动机构的夹持机构,机架侧面安装有对应被夹持甘蔗的图像识别机构,机架沿图像识别机构侧面安装有切割机构,上料机构、图像识别机构、夹持机构、驱动机构、切割机构均连接工控机进行控制;本发明通过自动化机构对甘蔗运转至图像识别机构位置进行实时识别检测甘蔗种芽,并同时处理图像信息,全方位检测甘蔗种芽,解决漏检、错检等问题,之后联合工控机使甘蔗种芽精准移动到切割位置,使得切出的甘蔗种芽段大小相同,便于储存、生产与运输,能更高效且精准地完成甘蔗的取芽。
Description
技术领域
本发明涉及一种基于机器视觉的甘蔗全方位检测取芽装置,属于农产品加工自动化技术领域。
背景技术
甘蔗是全球第一大糖料作物和第二大生物能源作物。目前,中国是世界第三大甘蔗生产国,甘蔗糖产量占国内食糖总产量的90%左右,但国内的食糖产量只能满足70%的需求,仍有30%依赖于进口。保证国内食糖生产自给自足一直是我国甘蔗生产的主要目标。中国作为世界上最大的食糖生产和消费国之一,面临着较大的供需压力,但国内制糖产业的机械化程度较低,大多依靠半人工半自动化的生产方法。
甘蔗的传统种植方法是将整根甘蔗切若干段,将包含3到4个甘蔗种芽节的整段甘蔗全部种入土中。这种种植方法对种子需求量大,种植区域挖掘所需的工作量大,同时因为将整段甘蔗作为种子,其中连带了大量不需要的甘蔗杆茎部分,造成了浪费;甘蔗中甘蔗芽的重量约占1/4,甘蔗杆茎则约占3/4,传统种植方式大量增加了甘蔗种芽的运输成本,从而增加了整体的种植成本;将甘蔗种芽子与甘蔗茎分离后,可将甘蔗种芽单独运输用于耕种,而甘蔗茎部分则用于榨糖,大大减少了运输成本与种植农户的工作量,提高了甘蔗的经济效益;同时传统的取芽方法效率低、人工成本高、工作量大、取芽精度低且操作危险性高,因此研究甘蔗种芽与甘蔗茎的自动切割与分取技术具有重要的意义。
目前甘蔗取芽过程通常需要工人手持甘蔗,人为的将甘蔗种芽部分放入刀口,切刀进给切取种芽,再手动将第二个甘蔗种芽部分放入刀口位置,如此往复;这种取芽方式精度低、效率低、人工成本高、劳动强度大、易发生危险;因其基本靠人工的方法完成取芽作业,难以形成流水线与产业链,导致甘蔗种植与加工难以形成完整的产业链。
发明内容
为了克服背景技术中存在的问题,本发明通过自动化机构对甘蔗运转至图像识别机构位置进行实时识别检测甘蔗种芽,并同时处理图像信息,全方位检测甘蔗种芽,解决漏检、错检等问题,之后联合工控机使甘蔗种芽精准移动到切割位置,使得切出的甘蔗种芽段大小相同,便于储存、生产与运输,能更高效且精准地完成甘蔗的取芽。
所述基于机器视觉的甘蔗全方位检测取芽装置包括上料机构、图像识别机构、夹持机构、驱动机构、切割机构、机架,所述机架对应设置有用于输送甘蔗的上料机构,机架上安装有连接驱动机构的夹持机构,夹持机构用于将甘蔗输送至指定位置后对其进行抓取,并通过驱动机构带动夹持机构夹持甘蔗进行移动,机架侧面安装有对应被夹持甘蔗的图像识别机构,通过将甘蔗对应图像识别机构识别检测甘蔗种芽,驱动机构驱动夹持机构带动甘蔗的不同部位对应图像识别机构以便进行识别检测,机架沿图像识别机构侧面安装有切割机构,切割机构用于在图像识别机构识别检测甘蔗种芽后,对甘蔗进行切割分离,上料机构、图像识别机构、夹持机构、驱动机构、切割机构均连接工控机进行控制。
优选地,所述上料机构包括传送带输送机、光电传感器、隔板,所述传送带输送机对应夹持机构设置于机架前侧,传送带输送机的传送带上沿一定间距横向均布隔板,隔板在传送过程中对甘蔗进行限位,传送带输送机的机架上还安装有用于检测甘蔗到位的光电传感器。
优选地,所述驱动机构包括滑轨、带传送机构、输送电机,滑座,所述滑轨水平安装于机架,滑轨上滑动连接有用于安装夹持机构的滑座,滑轨内部安装连接输送电机的带传送机构,且带传送机构的传动带与滑座固定连接,通过传动带移动带动滑座沿滑轨水平运动。
优选地,所述夹持机构为夹爪气缸。
优选地,所述图像识别机构包括相机机架、CCD相机、环型光源,所述相机机架安装于机架上,相机机架内侧设置有环型光源,相机机架上至少安装有一组用于对甘蔗进行拍照识别的CCD相机。
优选地,所述切割机构包括气缸、切刀、槽刀,所述机架上安装有气缸,气缸上连接有用于分切甘蔗的切刀,机架上沿切刀相对位置安装有槽刀。
优选地,所述切刀和刀座均为附带两个分切位的U形结构,可沿甘蔗种芽左右两侧位置进行分切,切取甘蔗种芽部分。
优选地,所述刀座沿内侧对称设置有用于将甘蔗抵靠至分切点的挡料杆,两挡料杆之间形成有避免接触到甘蔗芽的间隙。
优选地,所述刀座底部设置有用于收集甘蔗种芽部分的种芽储料箱,种芽储料箱沿分切对应位置设置有用于收集甘蔗茎秆的茎秆储料箱,和接收甘蔗余料的余料储存箱。
优选地,所述刀座底部还设置有对接至种芽储料箱的导轨,导轨用于承接经分切后的甘蔗种芽滚入种芽储料箱。
本发明的有益效果为:
本发明通过自动化机构对甘蔗运转至图像识别机构位置进行实时识别检测甘蔗种芽,并同时处理图像信息,全方位检测甘蔗种芽,解决漏检、错检等问题,之后联合工控机使甘蔗种芽精准移动到切割位置,使得切出的甘蔗种芽段大小相同,便于储存、生产与运输,能更高效且精准地完成甘蔗的取芽。
附图说明
图1为本发明整体结构示意图;
图2为本发明上料结构示意图;
图3为本发明图像识别机构结构示意图;
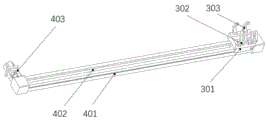
图4为本发明夹持机构结构与传输机构示意图;
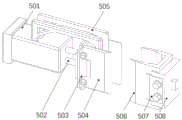
图5为本发明切割机构示意图;
图6为本发明导轨位置结构示意图。
附图中标号为:1-上料机构、101-传送带、102-隔板、103-光电传感器、104-传送带电机轴、105-传送带机架、2-图像识别机构、201-相机机架、202-固定连接件、203-CCD相机、204-环型光源、3-夹持机构、301-滑座、302-下夹爪、303-上夹爪、4-驱动机构、401-滑轨、402-传动带、403-输送电机、5-切割机构、501-气缸、502-气缸导杆、503-切刀连接件、504-切刀、505-挡料杆、506-槽刀、507-槽刀连接件、508-刀座、6-种芽储料箱、7-茎秆储料箱、8-机架、9-余料储存箱、10-气压机、11-工控机、12-导轨。
具体实施方式
为了使本发明的目的、技术方案和有益效果更加清楚,下面将结合附图,对本发明的优选实施例进行详细的说明,以方便技术人员理解。
如图1-6所示,所述基于机器视觉的甘蔗全方位检测取芽装置包括上料机构1、图像识别机构2、夹持机构3、驱动机构4、切割机构5、机架8,所述机架8对应设置有用于输送甘蔗的上料机构1,机架8上安装有连接驱动机构4的夹持机构3,夹持机构3用于将甘蔗输送至指定位置后对其进行抓取,并通过驱动机构4带动夹持机构3夹持甘蔗进行移动,机架8侧面安装有对应被夹持甘蔗的图像识别机构2,通过将甘蔗对应图像识别机构2识别检测甘蔗种芽,驱动机构4驱动夹持机构3带动甘蔗的不同部位对应图像识别机构2以便进行识别检测,机架8沿图像识别机构2侧面安装有切割机构5,切割机构5用于在图像识别机构2识别检测甘蔗种芽后,对甘蔗进行切割分离。在本实施例中,还配备有气压机10,从而对设备的气动机构提供气源。
上料机构1、图像识别机构2、夹持机构3、驱动机构4、切割机构5均连接工控机11进行控制,在本实施例中,工控机11包括人机交互显示屏、操作台、电机驱动板和PLC下位机;工控机11通过电机驱动板分别与所述上料机构1、图像识别机构2、夹持机构3、驱动机构4、所述切割机构5和所述PLC下位机连接;所述PLC下位机与所述驱动机构4连接。工控机11可通过设定函数、调整参数、载入算法等操作,联动控制各机构有序作业。
在开始取芽操作前,需要先训练深度学习目标检测模型,利用视觉检测机构,通过外部触发相机采集甘蔗图片,剔除其中拍摄不完整,弯曲度过大或特征不明显的甘蔗图片,使用标注工具labelImg软件对图像进行标注,生成XML类型的标注文件。每幅图像生成多幅数据增强图像,按照8∶1∶1的比例划分训练集、验证集与测试集;根据编写的训练程序,加载经过预处理后的甘蔗芽图片数据集,利用工作站训练甘蔗芽位置识别模型,训练结束后得出其损失函数曲线,分析损失值变化曲线,从多个生成的模型中选择最优的一组作为本装置使用的目标检测模型。
所述上料机构1包括传送带101输送机、光电传感器103、隔板102,所述传送带101输送机对应夹持机构3设置于机架8前侧,传送带101输送机的传送带101上沿一定间距横向均布隔板102,隔板102在传送过程中对甘蔗进行限位,传送带101输送机的机架8上还安装有用于检测甘蔗到位的光电传感器103。在本实施例中,传送带101上方横向两端部设有多组等间距的隔板102,隔板102间隔宽度根据甘蔗品种的粗细而定,相邻两隔板102之间形成槽位,能固定甘蔗,甘蔗通过遮挡光电传感器103的光路,触发光电传感器103传输信号;通过计算光电传感器103位置与夹持位置距离,与传送带101运行速度,得出信号延时触发时间。在短暂延迟时间后,工控机11会驱动气压机10的电磁阀,使夹持机构3通过下夹爪302与上夹爪303闭合夹紧(在本实施例中,夹持机构3选用夹爪气缸501),夹持传输至指定位置的甘蔗,使甘蔗固定于驱动机构4上,随驱动机构4移动。
驱动机构4包括滑轨401、带传送机构、输送电机403,滑座301,所述滑轨401水平安装于机架8,滑轨401水平设置,滑轨401上滑动连接有用于安装夹持机构3的滑座301,滑轨401内部安装连接输送电机403的带传送机构,且带传送机构的传动带402与滑座301固定连接,通过传动带402移动带动滑座301沿滑轨401水平运动,通过改变电机正反转,从而驱动传动带402正反转,带动滑座301沿滑轨401左右来回移动,通过直线移动,能够带动被夹持的甘蔗不断沿水平方向进行移动,从而将甘蔗的种芽一一与图像采集机构进行对应,实时识别检测甘蔗种芽。在本实施例中,驱动机构4设置有两组,与之匹配的,图像采集机构和切割机构5也设置有两组,大大提高了运输、识别、切割、收集的效率,在其他实施例中,也可选用直线模组替代驱动机构4。
所述图像识别机构2包括相机机架8201、CCD相机203、环型光源204,所述相机机架8201安装于机架8上,相机机架8201内侧设置有环型光源204,相机机架8201上至少安装有一组用于对甘蔗进行拍照识别的CCD相机203。在本实施例中,相机机架8201呈圆弧形,其圆弧形上等距固定连接有3个CCD相机203,三个工业相机处于同一圆弧轨道上,以同一圆心相隔120°设置,通过设置多个CCD相机203,全方位采集甘蔗种芽图像,规避相机拍摄死角、避免漏取、错取;所述相机机架8201一侧设有固定连接件202,所述固定连接件202与机架8连接;所述相机机架8201内侧设有环型光源204,提高亮度、光照均匀性,以提高图片对比度与识别精度。
所述切割机构5包括气缸501、切刀504、刀座508,所述机架8上安装有气缸501,气缸501上连接有用于分切甘蔗的切刀504,机架8上沿切刀504相对位置安装有刀座508,刀座508上安装有槽刀506,槽刀506内部轮廓与切刀504相契合;槽刀506端部设有槽刀连接件507,所述槽刀连接件507固定连接于刀座508;所述刀座508与机架8固定连接。所述切刀504和槽刀506均为附带两个分切位的U形结构(切刀504为双切刀504型刀具),可沿甘蔗种芽左右两侧位置进行分切,切取甘蔗种芽部分。所述槽刀506沿内侧对称设置有用于将甘蔗抵靠至分切点的挡料杆505,两挡料杆505之间形成有避免接触到甘蔗芽的间隙。若更换甘蔗的品种或是意图调整甘蔗种芽部分切段长度,可以通过调整两刀面的间隔距离来满足实际需求,扩大了本装置的使用范围。气压机10进气输入给气缸501,气缸501便可通过气体动力推动导杆与切刀504运动,进行甘蔗种芽切取,所述挡料杆505一端部固定连接于气缸501,另一端部位于切刀504两刀面内侧中间位置,由于切割时的阻力与摩擦力作用,被切取下的甘蔗种芽可能被卡在双刀面的内侧,当切刀504返回初始位置时,挡料杆505便会阻挡被切下的甘蔗种芽部分,使其脱离切刀504,落入种芽储料箱6。
当驱动机构4将甘蔗末端输送至图像采集区域后,图像采集机构中的多个相机会实时识别检测甘蔗种芽,并同时处理图像信息,以目标识别框的中心位置为甘蔗芽坐标,通过将中心位置坐标至图像采集区域边缘的距离与采集区域边缘至切割位置的距离相加得到距离参数;通过modbus通讯将距离参数信息传输到下位机PLC控制器中,下位机控制器PLC会根据接收的信息,通过驱动器驱动驱动机构4,使甘蔗种芽精准移动到切割位置。
如图1所示,所述刀座508底部设置有用于收集甘蔗种芽部分的种芽储料箱6,种芽储料箱6沿分切对应位置设置有用于收集甘蔗茎秆的茎秆储料箱7,和接收甘蔗余料的余料储存箱9。所述刀座508底部还设置有对接至种芽储料箱6的导轨,导轨用于承接经分切后的甘蔗种芽滚入种芽储料箱6。
甘蔗芽输送至切割位置后,切割机构55对甘蔗进行取芽操作,PLC驱动气压机10中的电磁阀,对气缸501和夹爪气缸501提供气源,气缸501驱动后气缸活塞杆502向前移动,推动切刀504504向前运动,以切取甘蔗种芽;切刀504运动至槽刀506位置,切断甘蔗茎秆,并在槽刀506的反作用力下切断甘蔗表皮,后退回切刀504初始位置;切刀504在返回初始位置的过程中,挡料杆505便会阻挡被切下的甘蔗种芽部分,使其脱离切刀504,之后甘蔗种芽沿导轨落入种芽储料箱6。其中由于挡料杆505为双杆设计,两杆中间留有一定空挡距离形成间隙,以避免触碰甘蔗芽;甘蔗种芽前端的甘蔗茎秆部分会因为失去连接支撑,在重力的影响下落入下方所设的茎秆储料箱7;至此视为完成一次取芽操作;在切取操作时甘蔗会处于停止运动的状态,此时图像采集机构会为下一次的种芽切取操作,获取图像位置与距离参数等信息,输送给PLC控制系统,以进行下一个甘蔗芽的输送操作;如此往复循环,直至夹持机构3运动至所指定的极限位置时,停止输送,夹持机构3松开,使甘蔗未切取完成的剩余部分在重力影响下落入余料储料箱。
本发明的工作流程为:甘蔗上料——夹持机构3夹持运转甘蔗——驱动机构4带动甘蔗移动——图像识别机构2识别甘蔗种芽——驱动机构4带动甘蔗移动移动至切割机构5——切割出甘蔗种芽——驱动机构4驱动配合图像识别机构2循环至下一个甘蔗种芽切割——夹爪松开——结束一根甘蔗的取芽。
本发明的工作过程:上料机构1传输甘蔗至传送带101端部位置,甘蔗通过遮挡光路触发光电传感器103,光电传感器103传输信号,延迟一段时间后驱动夹持机构3夹持传输至指定位置的甘蔗;夹持机构3会随输送机构移动,使甘蔗末端进入图像采集区域,图像采集机构中的多个相机会实时识别检测甘蔗种芽,以目标识别框的中心位置为甘蔗芽坐标,通过将中心位置坐标至图像采集区域边缘的距离与采集区域边缘至切割位置的距离相加得到距离参数;将所得距离参数传输给PLC控制系统,PLC控制系统驱动输送机构运动指定距离,将甘蔗芽精准输送至切割位置后,切割机构5对甘蔗进行取芽操作;被切取下的种芽落入种芽储料箱6,甘蔗种芽前端的甘蔗茎秆部分会因为失去连接支撑,在重力的影响下落入下方所设的茎秆储料箱7;至此视为完成一次取芽操作;在切取操作时甘蔗会处于停止运动的状态,此时图像采集机构会为下一次的种芽切取操作,获取图像位置与距离参数等信息,输送给PLC控制系统,以进行下一步的输送操作;如此往复循环,直至夹持机构3运动至所指定的极限位置时,停止输送,夹持机构3松开,使甘蔗未切取完成的剩余部分,在重力影响下落入余料储料箱。
具体地,通过设置切刀504两刀面的中间距离,使得切出的甘蔗种芽段大小相同,便于储存、生产与运输,能更高效且精准地完成甘蔗的取芽;若更换甘蔗的品种或是意图调整甘蔗种芽部分切段长度,可以通过调整两刀面的间隔距离来满足实际需求,扩大了本装置的使用范围;工控机11可实时检测设备运行状态,并可自动生成记录文件,便于问题查找与后续功能的开发;工控机11可控制设备开始、急停、结束等,且可实时调整系统参数,使设备的使用更加灵活可控;图像采集机构的快速采集与整体机构的高效率切割,上料机构1快速输送甘蔗,可实现甘蔗的高效率取芽;本装置在切取甘蔗时,甘蔗处于悬空状态,甘蔗种芽完全不会因触碰而产生损伤;本装置环形设置摆放相机,全方位检测甘蔗种芽,解决漏检、错检等问题;驱动机构4为双通道设计,双通道输送方向不同,当完成一根甘蔗的所有取芽操作后,两夹持机构3分别处于驱动机构4两端的极限位置,此时无需回归初始位置,直接进行下一步上料操作,两通道运行方向调转,进行下一根甘蔗的取芽操作,以省去设备回位的时间与动力消耗,提高取芽效率;本装置可实现甘蔗种芽与甘蔗茎的分流,避免了人工分拣,减少了成本,提高了整体效率。本装置有着极高的效率,便于形成流水线,整体框架设计简单,方便进行设备维修与零件更换;综上所述,本装置具有成本低、结构简单、识别检测全面、识别速度快、精度高,切割速度快,稳定性好、危险性低,损芽率低等有益效果。
本发明通过自动化机构对甘蔗运转至图像识别机构位置进行实时识别检测甘蔗种芽,并同时处理图像信息,全方位检测甘蔗种芽,解决漏检、错检等问题,之后联合工控机使甘蔗种芽精准移动到切割位置,使得切出的甘蔗种芽段大小相同,便于储存、生产与运输,能更高效且精准地完成甘蔗的取芽。
最后说明的是,以上优选实施例仅用以说明本发明的技术方案而非限制,尽管通过上述优选实施例已经对本发明进行了详细的描述,但本领域技术人员应当理解,可以在形式上和细节上对其做出各种各样的改变,而不偏离本发明权利要求书所限定的范围。
Claims (10)
1.一种基于机器视觉的甘蔗全方位检测取芽装置,其特征在于:所述基于机器视觉的甘蔗全方位检测取芽装置包括上料机构(1)、图像识别机构(2)、夹持机构(3)、驱动机构(4)、切割机构(5)、机架(8),所述机架(8)对应设置有用于输送甘蔗的上料机构(1),机架(8)上安装有连接驱动机构(4)的夹持机构(3),夹持机构(3)用于将甘蔗输送至指定位置后对其进行抓取,并通过驱动机构(4)带动夹持机构(3)夹持甘蔗进行移动,机架(8)侧面安装有对应被夹持甘蔗的图像识别机构(2),通过将甘蔗对应图像识别机构(2)识别检测甘蔗种芽,驱动机构(4)驱动夹持机构(3)带动甘蔗的不同部位对应图像识别机构(2)以便进行识别检测,机架(8)沿图像识别机构(2)侧面安装有切割机构(5),切割机构(5)用于在图像识别机构(2)识别检测甘蔗种芽后,对甘蔗进行切割分离,上料机构(1)、图像识别机构(2)、夹持机构(3)、驱动机构(4)、切割机构(5)均连接工控机(11)进行控制。
2.根据权利要求1所述的基于机器视觉的甘蔗全方位检测取芽装置,其特征在于:所述上料机构(1)包括传送带输送机(101)、光电传感器、隔板(102),所述传送带输送机(101)对应夹持机构(3)设置于机架(8)前侧,传送带输送机(101)的传送带上沿一定间距横向均布隔板(102),隔板(102)在传送过程中对甘蔗进行限位,传送带输送机(101)的机架(8)上还安装有用于检测甘蔗到位的光电传感器。
3.根据权利要求1或2所述的基于机器视觉的甘蔗全方位检测取芽装置,其特征在于:所述驱动机构(4)包括滑轨(401)、带传送机构、输送电机(403),滑座(301),所述滑轨(401)水平安装于机架(8),滑轨(401)上滑动连接有用于安装夹持机构(3)的滑座(301),滑轨(401)内部安装连接输送电机(403)的带传送机构,且带传送机构的传动带(402)与滑座(301)固定连接,通过传动带(402)移动带动滑座(301)沿滑轨(401)水平运动。
4.根据权利要求3所述的基于机器视觉的甘蔗全方位检测取芽装置,其特征在于:所述夹持机构(3)为夹爪气缸(501)。
5.根据权利要求1或4所述的基于机器视觉的甘蔗全方位检测取芽装置,其特征在于:所述图像识别机构(2)包括相机机架(8)(201)、CCD相机(203)、环型光源(204),所述相机机架(8)(201)安装于机架(8)上,相机机架(8)(201)内侧设置有环型光源(204),相机机架(8)(201)上至少安装有一组用于对甘蔗进行拍照识别的CCD相机(203)。
6.根据权利要求5所述的基于机器视觉的甘蔗全方位检测取芽装置,其特征在于:所述切割机构(5)包括气缸(501)、切刀(504)、槽刀(506),所述机架(8)上安装有气缸(501),气缸(501)上连接有用于分切甘蔗的切刀(504),机架(8)上沿切刀(504)相对位置安装有槽刀(506)。
7.根据权利要求6所述的基于机器视觉的甘蔗全方位检测取芽装置,其特征在于:所述切刀(504)和刀座均为附带两个分切位的U形结构,可沿甘蔗种芽左右两侧位置进行分切,切取甘蔗种芽部分。
8.根据权利要求7所述的基于机器视觉的甘蔗全方位检测取芽装置,其特征在于:所述刀座沿内侧对称设置有用于将甘蔗抵靠至分切点的挡料杆(505),两挡料杆(505)之间形成有避免接触到甘蔗芽的间隙。
9.根据权利要求6或8所述的基于机器视觉的甘蔗全方位检测取芽装置,其特征在于:所述刀座底部设置有用于收集甘蔗种芽部分的种芽储料箱(6),种芽储料箱(6)沿分切对应位置设置有用于收集甘蔗茎秆的茎秆储料箱(7),和接收甘蔗余料的余料储存箱(9)。
10.根据权利要求9所述的基于机器视觉的甘蔗全方位检测取芽装置,其特征在于:所述刀座底部还设置有对接至种芽储料箱(6)的导轨,导轨用于承接经分切后的甘蔗种芽滚入种芽储料箱(6)。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211490718.4A CN115885617A (zh) | 2022-11-25 | 2022-11-25 | 一种基于机器视觉的甘蔗全方位检测取芽装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211490718.4A CN115885617A (zh) | 2022-11-25 | 2022-11-25 | 一种基于机器视觉的甘蔗全方位检测取芽装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN115885617A true CN115885617A (zh) | 2023-04-04 |
Family
ID=86482855
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202211490718.4A Pending CN115885617A (zh) | 2022-11-25 | 2022-11-25 | 一种基于机器视觉的甘蔗全方位检测取芽装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115885617A (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116267088A (zh) * | 2023-04-14 | 2023-06-23 | 昆明理工大学 | 一种基于机器视觉的甘蔗自动切芽生产设备 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU3195077A (en) * | 1976-12-30 | 1979-06-28 | Mik International Pty Ltd | Sugar cane cutting device |
| CN102630429A (zh) * | 2012-04-24 | 2012-08-15 | 广西大学 | 甘蔗切割防伤芽系统 |
| CN106617161A (zh) * | 2017-02-19 | 2017-05-10 | 周佰利 | 一种智能甘蔗剥皮机器人 |
| CN115004915A (zh) * | 2022-04-12 | 2022-09-06 | 昆明理工大学 | 一种全自动甘蔗取芽装置 |
| CN115256503A (zh) * | 2022-08-08 | 2022-11-01 | 昆明理工大学 | 一种基于机器视觉的甘蔗自动取芽装置 |
-
2022
- 2022-11-25 CN CN202211490718.4A patent/CN115885617A/zh active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU3195077A (en) * | 1976-12-30 | 1979-06-28 | Mik International Pty Ltd | Sugar cane cutting device |
| CN102630429A (zh) * | 2012-04-24 | 2012-08-15 | 广西大学 | 甘蔗切割防伤芽系统 |
| CN106617161A (zh) * | 2017-02-19 | 2017-05-10 | 周佰利 | 一种智能甘蔗剥皮机器人 |
| CN115004915A (zh) * | 2022-04-12 | 2022-09-06 | 昆明理工大学 | 一种全自动甘蔗取芽装置 |
| CN115256503A (zh) * | 2022-08-08 | 2022-11-01 | 昆明理工大学 | 一种基于机器视觉的甘蔗自动取芽装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116267088A (zh) * | 2023-04-14 | 2023-06-23 | 昆明理工大学 | 一种基于机器视觉的甘蔗自动切芽生产设备 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101627832B (zh) | 烟片在线自动识别分级系统 | |
| CN111165176A (zh) | 一种茶叶人工智能采摘机器人 | |
| US10327379B2 (en) | Pot seedling feeding system for transplanter | |
| CN109158336B (zh) | 一种苹果初选分级设备 | |
| CN203872633U (zh) | 全自动甜瓜贴接嫁接机 | |
| US10638656B2 (en) | Apparatus having automatically adjustable pot seedling feed rate and method therfor | |
| CN102809357B (zh) | 农作物叶面积信息自动化测量分析仪 | |
| CN109168499B (zh) | 一种甘蔗预切种工作站 | |
| CN108464114B (zh) | 一种高位水果采摘与收集一体机 | |
| CN102124906A (zh) | 基于视觉的蔬果嫁接机待嫁接苗分类装置 | |
| CN115885617A (zh) | 一种基于机器视觉的甘蔗全方位检测取芽装置 | |
| CN109035244B (zh) | 自动摘茧系统、自动摘茧机及摘茧方法 | |
| CN103843594A (zh) | 全自动甜瓜贴接嫁接机 | |
| CN101940096B (zh) | 玉米种子单倍体分拣系统 | |
| CN105783990A (zh) | 一种用于玉米果穗室内精确考种的全景图像测量系统 | |
| CN115004915A (zh) | 一种全自动甘蔗取芽装置 | |
| CN112710663A (zh) | 一种高通量植物全生命周期表型信息的测量系统及测量方法 | |
| CN115256503A (zh) | 一种基于机器视觉的甘蔗自动取芽装置 | |
| CN207593994U (zh) | 一种全自动扫描优化锯切分类设备 | |
| CN114303644B (zh) | 鲜食葡萄无损采摘分级、打包、收集机器人及其使用方法 | |
| CN108934337A (zh) | 一种全自动穴盘苗移栽机的幼苗监测剔除及补苗装置 | |
| CN114777667A (zh) | 一种锯条齿形在线检测装置及检测方法 | |
| CN211185838U (zh) | 一种基于图像及光谱特征的烟叶快速检测分级装置 | |
| CN201789739U (zh) | 玉米种子单倍体分拣系统 | |
| CN115316114B (zh) | 一种基于双目三维视觉定位的水培叶菜采收机器人 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |