CN115538957A - 一种可变调速液压驱动双绳动力猫道电控系统 - Google Patents
一种可变调速液压驱动双绳动力猫道电控系统 Download PDFInfo
- Publication number
- CN115538957A CN115538957A CN202211471763.5A CN202211471763A CN115538957A CN 115538957 A CN115538957 A CN 115538957A CN 202211471763 A CN202211471763 A CN 202211471763A CN 115538957 A CN115538957 A CN 115538957A
- Authority
- CN
- China
- Prior art keywords
- subsystem
- valve
- hydraulic
- main
- module
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000012546 transfer Methods 0.000 claims abstract description 122
- 238000004886 process control Methods 0.000 claims abstract description 31
- 238000012544 monitoring process Methods 0.000 claims abstract description 25
- 230000033228 biological regulation Effects 0.000 claims abstract description 16
- 230000009471 action Effects 0.000 claims abstract description 12
- 238000012800 visualization Methods 0.000 claims abstract description 4
- 230000033001 locomotion Effects 0.000 claims description 42
- 238000007599 discharging Methods 0.000 claims description 40
- 238000000034 method Methods 0.000 claims description 29
- 230000017525 heat dissipation Effects 0.000 claims description 28
- 230000008569 process Effects 0.000 claims description 28
- 238000001816 cooling Methods 0.000 claims description 11
- 239000010720 hydraulic oil Substances 0.000 claims description 10
- 239000007788 liquid Substances 0.000 claims description 10
- 230000009977 dual effect Effects 0.000 claims description 8
- 238000012545 processing Methods 0.000 claims description 8
- 238000005520 cutting process Methods 0.000 claims description 5
- 238000006073 displacement reaction Methods 0.000 claims description 5
- 238000005286 illumination Methods 0.000 claims description 2
- 238000005553 drilling Methods 0.000 abstract description 15
- 239000003921 oil Substances 0.000 description 22
- 238000010586 diagram Methods 0.000 description 20
- 230000001133 acceleration Effects 0.000 description 9
- 238000012423 maintenance Methods 0.000 description 9
- 230000001174 ascending effect Effects 0.000 description 7
- 238000004891 communication Methods 0.000 description 7
- 239000010729 system oil Substances 0.000 description 5
- 239000003208 petroleum Substances 0.000 description 4
- 238000004519 manufacturing process Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 102100030310 5,6-dihydroxyindole-2-carboxylic acid oxidase Human genes 0.000 description 2
- 101000773083 Homo sapiens 5,6-dihydroxyindole-2-carboxylic acid oxidase Proteins 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 238000009826 distribution Methods 0.000 description 2
- 239000012535 impurity Substances 0.000 description 2
- 229910000831 Steel Inorganic materials 0.000 description 1
- 230000003749 cleanliness Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 230000006641 stabilisation Effects 0.000 description 1
- 238000011105 stabilization Methods 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
Images












Classifications
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B19/00—Handling rods, casings, tubes or the like outside the borehole, e.g. in the derrick; Apparatus for feeding the rods or cables
- E21B19/14—Racks, ramps, troughs or bins, for holding the lengths of rod singly or connected; Handling between storage place and borehole
Landscapes
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- Mining & Mineral Resources (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Environmental & Geological Engineering (AREA)
- Fluid Mechanics (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Geochemistry & Mineralogy (AREA)
- Fluid-Pressure Circuits (AREA)
Abstract
本发明涉及钻井设备上下钻具领域,公开了一种可变调速液压驱动双绳动力猫道电控系统:传感器子系统监控采集系统信息提供给主控柜子系统内的软件子系统分析;主控柜子系统根据系统状态及操作控制指令向内部动力侧和过程控制侧输出操作指令,根据收到的操作指令,动力侧驱动液压模块,过程控制侧控制底座中转箱子系统和输送臂中转箱子系统;过程控制侧配置有HMI模块,通过触摸屏方式显示系统保护监视及动作相关状态;底座中转箱子系统和输送臂中转箱子系统接收指令驱动机械部件动作;操作台子系统和无线操作子系统提供有线和无线操作控制模式并输出操作控制指令;软件子系统提供信息分析、操作指令协调、速度调节、系统保护及可视化的软件支持。
Description
技术领域
本发明属于钻井设备上下钻具领域,具体涉及一种可变调速液压驱动双绳动力猫道电控系统。
背景技术
随着近些年来化石液体能源需求量的不断增加,为减少陆地钻机钻具上下钻台时的磨损,提高钻机效率,降低人工劳动和钻井成本,研制出满足目前液压驱动双绳动力猫道市场需求的可变调速液压驱动双绳动力猫道电控系统,对于提升动力猫道产品的市场竞争力具有较大的现实意义。
目前,对石油钻井猫道的可变调速液压驱动双绳动力猫道电控系统的性能要求越来越高,因此,如何设计一种可变调速液压驱动双绳动力猫道电控系统,使其同时实现工作稳定、操作简单、维护方便、设备运行平稳、软启停、可调速、节约能源、提高猫道效率、满足不同高度液压驱动双绳动力猫道,以及满足高效、安全、低成本的整体需求,是本领域内一个亟待解决的技术问题。
发明内容
为了解决现有技术中存在的上述问题,本发明提供了一种可变调速液压驱动双绳动力猫道电控系统。本发明要解决的技术问题通过以下技术方案实现:
一种可变调速液压驱动双绳动力猫道电控系统,其特征在于,包括传感器子系统、主控柜子系统、底座中转箱子系统、输送臂中转箱子系统、操作台子系统、无线操作子系统和集成在所述主控柜子系统内的软件子系统;其中,
所述传感器子系统,用于监控并采集所述可变调速液压驱动双绳动力猫道电控系统中表征各部件状态的系统信息并提供给所述主控柜子系统内的所述软件子系统进行分析;
所述主控柜子系统,用于根据对所述系统信息进行分析和处理得到的系统状态以及接收到的操作控制指令,向所述主控柜子系统的动力侧和过程控制侧输出对应的操作指令,所述动力侧根据接收到的操作指令驱动液压模块;所述过程控制侧根据接收到的操作指令控制所述底座中转箱子系统和所述输送臂中转箱子系统;其中,所述过程控制侧配置有HMI模块,通过触摸屏方式显示系统保护监视及动作相关的状态;
所述底座中转箱子系统和所述输送臂中转箱子系统,用于接收所述主控柜子系统的过程控制侧的指令完成相应的操作指令,并驱动对应机械部件的动作;
所述操作台子系统和所述无线操作子系统,分别用于提供有线操作控制模式和无线操作控制模式,输出相应的操作控制指令给所述主控柜子系统;
所述软件子系统,用于为所述可变调速液压驱动双绳动力猫道电控系统提供信息分析、操作指令协调、速度调节、系统保护及可视化的软件支持。
在本发明的一个实施例中,所述传感器子系统,包括:
保护及监测所述液压模块的温度变送器、液位变送器、主泵压力变送器、副泵压力变送器、主压力开关、副压力开关;其中,所述液压模块包括用于为整个系统提供液压动力源的主泵和副泵;
保护及监测输送臂的低限位传感器、高限位传感器、输送臂模拟量位置编码器、保护及监测推车的推车模拟量位置编码器。
在本发明的一个实施例中,所述主控柜子系统的动力侧配置有:
用于驱动主泵的主电机控制回路、用于驱动副泵的副电机控制回路、用于驱动液压油循环泵和双台空气冷却散热风扇的散热模块控制回路、过程控制侧DC供电回路和照明回路;
其中,所有电机回路均设有转动方向保护电路以及过载保护电路。
在本发明的一个实施例中,除所述HMI模块外,所述主控柜子系统的过程控制侧还配置有:
Profinet总线交换机、RS485总线模块、可编程逻辑控制器PLC、主控柜子系统模拟量输入模块、主控柜子系统模拟量输出模块、主控柜子系统数字量输入模块和主控柜子系统数字量输出模块。
在本发明的一个实施例中,所述主控柜子系统的过程控制侧还配置有:
主溢流阀、副溢流阀、主比例流量阀、副比例流量阀、主比例压力阀、副比例压力阀和用于监控并显示系统状态的三色警示灯;
其中,所述主溢流阀和所述副溢流阀分别用于切断主泵和副泵为后级阀组提供的液压源;所述主比例流量阀、所述主比例压力阀分别用于主泵液压回路流量及压力的控制,用于控制输送臂运动过程;所述副比例流量阀、所述副比例压力阀分别用于副泵液压回路流量及压力的控制,用于控制推车运动过程;所述三色警示灯包括红色警示灯、黄色警示灯、绿色警示灯和蜂鸣器;所述红色警示灯、所述黄色警示灯和所述绿色警示灯点亮时分别表示停机、警示、系统运行,所述蜂鸣器为系统运行警告提供声音支持。
在本发明的一个实施例中,所述底座中转箱子系统,包括:
底座中转箱子系统液压电磁阀组、底座中转箱子系统Profinet-IO接口模块和底座中转箱子系统数字量输出模块;
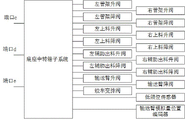
其中,所述底座中转箱子系统液压电磁阀组,包括:左管架升阀、右管架升阀、左管架降阀、右管架降阀、左上料升阀、右上料升阀、左上料降阀、右上料降阀、左辅助出料升阀、右辅助出料升阀、左辅助出料降阀、右辅助出料降阀、输送臂升阀、输送臂降阀和绞车变排阀。
在本发明的一个实施例中,所述输送臂中转箱子系统,包括:
输送臂中转箱子系统液压电磁阀组、输送臂中转箱子系统Profinet-IO接口模块和输送臂中转箱子系统数字量输出模块;
其中,所述输送臂中转箱子系统液压电磁阀组,包括:左安全销升阀、右安全销升阀、左安全销降阀、右安全销降阀、左出料升阀、右出料升阀、左出料降阀、右出料降阀、推车前进阀和推车后退阀。
在本发明的一个实施例中,所述操作台子系统,包括:
防爆操作台、操作台子系统Profinet-IO接口模块、操作台子系统数字量输出模块和操作台子系统数字量输入模块。
在本发明的一个实施例中,所述无线操作子系统,包括:
所述无线遥控器和内置于所述主控柜子系统的RS485总线无线接收器。
在本发明的一个实施例中,所述软件子系统,包括:
PLC程序和HMI组态画面。
本发明实施例提供了一种可变调速液压驱动双绳动力猫道电控系统,适用于所有液压驱动双绳式动力猫道。系统保护通过传感器子系统将系统信息采集进入主控柜子系统中进行分析、处理,并在HMI模块进行显示及保护参数的修改和确认;系统保护分析得出系统状态,通过所述操作台子系统或所述无线操作子系统接收操作控制指令,判断其携带的目前进入操作,继而可实现变调速液压驱动双绳动力猫道作业的平滑稳定。该系统能有效地对设备数据进行实时采集、分析,通过HMI模块及主控柜子系统、底座中转箱子系统和输送臂中转箱子系统实现设备的平滑稳定运行。本发明实施例提供的可变调速液压驱动双绳动力猫道电控系统具有通讯方式简单、操作简单、网络结构简单、易于维护、维护成本低、经久耐用、高效、安全等优点;同时可实现输送臂上下液压调速运动控制,能够减少运动过程中的惯性,实现软启停,能够提高动力猫道的运行平稳性,且系统可靠程度较高,能够节约能源且对制作工艺的要求较低,可以广泛运用在不同高度的石油钻机双绳动力猫道上,满足石油钻机安全可靠和稳定上下钻具的需求。
附图说明
图1为本发明实施例所提供的一种可变调速液压驱动双绳动力猫道电控系统的结构示意图;
图2为本发明实施例提供的可变调速液压驱动双绳动力猫道电控系统内主控柜子系统和相关部件的连接关系示意图;
图3为本发明实施例提供的可变调速液压驱动双绳动力猫道电控系统内底座中转箱子系统和相关部件的连接关系示意图;
图4为本发明实施例提供的可变调速液压驱动双绳动力猫道电控系统的输送臂上升示意曲线图;
图5为本发明实施例提供的可变调速液压驱动双绳动力猫道电控系统的输送臂下降示意曲线图;
图6为本发明实施例提供的可变调速液压驱动双绳动力猫道电控系统内输送臂中转箱子系统和相关部件的连接关系示意图;
图7为本发明实施例提供的可变调速液压驱动双绳动力猫道电控系统中Profinet和RS485系统网络配置示意图;
图8为本发明实施例提供的可变调速液压驱动双绳动力猫道电控系统中昆仑通态McgsPro组态软件的系统HMI 用户界面示意图;
图9为本发明实施例提供的可变调速液压驱动双绳动力猫道电控系统中昆仑通态McgsPro组态软件的系统HMI 主界面示意图;
图10为本发明实施例提供的可变调速液压驱动双绳动力猫道电控系统中昆仑通态McgsPro组态软件的系统HMI 设置界面示意图;
图11为本发明实施例提供的可变调速液压驱动双绳动力猫道电控系统中昆仑通态McgsPro组态软件的系统HMI 操作记录界面示意图;
图12为本发明实施例提供的可变调速液压驱动双绳动力猫道电控系统中昆仑通态McgsPro组态软件的系统HMI 报警界面示意图;
图13为本发明实施例提供的可变调速液压驱动双绳动力猫道电控系统中昆仑通态McgsPro组态软件的系统HMI 信息界面-网络状态界面示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1所示,本发明实施例所提供的一种可变调速液压驱动双绳动力猫道电控系统,以下简称系统,可以包括传感器子系统、主控柜子系统、底座中转箱子系统、输送臂中转箱子系统、操作台子系统、无线操作子系统和集成在主控柜子系统内的软件子系统;其中,
传感器子系统,用于监控并采集可变调速液压驱动双绳动力猫道电控系统中表征各部件状态的系统信息并提供给主控柜子系统内的软件子系统进行分析;
主控柜子系统,用于根据对系统信息进行分析和处理得到的系统状态以及接收到的操作控制指令,向主控柜子系统的动力侧和过程控制侧输出对应的操作指令,动力侧根据接收到的操作指令驱动液压模块;过程控制侧根据接收到的操作指令控制底座中转箱子系统和输送臂中转箱子系统;其中,过程控制侧配置有HMI模块,通过触摸屏方式显示系统保护监视及动作相关的状态;
底座中转箱子系统和输送臂中转箱子系统,用于接收主控柜子系统的过程控制侧的指令完成相应的操作指令,并驱动对应机械部件的动作;
操作台子系统和无线操作子系统,分别用于提供有线操作控制模式和无线操作控制模式,输出相应的操作控制指令给主控柜子系统;
软件子系统,用于为可变调速液压驱动双绳动力猫道电控系统提供信息分析、操作指令协调、速度调节、系统保护及可视化的软件支持。
以下对各个子系统分别进行说明。
(1)传感器子系统
可选的一种实施方式中,传感器子系统,包括:
保护及监测液压模块的温度变送器、液位变送器、主泵压力变送器、副泵压力变送器、主压力开关、副压力开关;其中,液压模块包括用于为整个系统提供液压动力源的主泵和副泵。
保护及监测输送臂的低限位传感器、高限位传感器、输送臂模拟量位置编码器、保护及监测推车的推车模拟量位置编码器。
其中,温度变送器、液位变送器、主泵压力变送器、副泵压力变送器、主压力开关、副压力开关可以连接在主控柜子系统上。本发明实施例中主泵和副泵指的是液压泵,用于为系统提供液压动力源,且主泵具备软启动操作功能。温度变送器、液位变送器、主压力开关、副压力开关用于整体监视液压模块油箱内液压油的状态。具体的,温度变送器用于监视、反馈温度信息,由此系统可以判断散热模块的运行状态,继而做出相应的调整,比如对散热模块启动温度设置、停止温度设置,进行系统高温报警温度设置等,从而对液压模块的散热进行管控。其中,散热模块包括液压油循环泵和双台空气冷却散热风扇;液压油循环泵用于在液压模块中将液压油循环过滤冷却、反复循环,以保证液压油的清洁度和温度,维持液压模块正常运行;双台空气冷却散热风扇具体用于散热。液位变送器用于监视、反馈液压油的液位信息,由此系统可以对系统油位相关参数进行相应的调整,比如进行高油位、低油位、极低油位设定等,其中高油位用于反馈系统所需油位最高位,低油位用于反馈系统所需油位底限位,极低油位用于停主泵和副泵使用。主压力开关用于主泵、副泵油杂质监测,系统通过软件子系统的HMI组态画面提示其滤芯更换信息;副压力开关用于散热模块油杂质监测,系统通过HMI组态画面提示其滤芯更换信息。主泵压力变送器、副泵压力变送器分别监视主泵和副泵的液压输出压力,通过HMI组态画面分别判断主泵和副泵的压力输出能力。
其中,低限位传感器、高限位传感器、输送臂模拟量位置编码器、推车模拟量位置编码器可以连接在输送臂中转箱子系统或者底座中转箱子系统上。低限位传感器、高限位传感器、输送臂模拟量位置编码器用于保护及监测输送臂的位置信息。比如,可以通过对输送臂运动过程的最高位的设定,并利用高限位传感器实时监测输送臂的位置,在其达到最高位时启动相关的报警或者保护装置等。推车模拟量位置编码器用于保护及监测推车的位置信息;同样的,也可以对推车运动过程中相关位置设定一些阈值参数,通过推车模拟量位置编码器实时监测推车的位置信息,在达到相应阈值参数时启动相关的报警或者保护装置等,具体在此不做详细说明。
(2)主控柜子系统
本发明实施例的主控柜子系统分为动力侧和过程控制侧。在实际使用时,主控柜子系统可以用Main Site表示,相应的符号可以为CC,其中,Main Site意为主站,CC为主控柜简称。并且,需要对其进行IP地址的设置以实现通信功能,其IP地址比如可以为192.168.0.1等等。
动力侧对应于液压模块,可选的一种实施方式中,主控柜子系统的动力侧配置有:
用于驱动主泵的主电机控制回路、用于驱动副泵的副电机控制回路、用于驱动液压油循环泵和双台空气冷却散热风扇的散热模块控制回路、过程控制侧DC供电回路和照明回路。
其中,所有电机回路均设有转动方向保护电路以及过载保护电路;主控柜子系统的动力侧具有软启动主电机及驱动其他电机的能力。关于上述各控制回路、DC供电回路和照明回路的具体电路结构,可以在相应的现有电路结构基础上,根据场景需要设计得到,在此不做详细说明。
过程控制侧对应于传感器子系统、底座中转箱子系统和输送臂中转箱子系统。过程控制侧中的HMI模块可以包括一个触摸屏,能够显示系统保护监视及动作相关的状态,可以理解的是,本发明实施例系统中各种采集、监视的状态参数或者设定、输出的相关参数均可以显示在该触摸屏上,通过提供人机交互界面及相应的操作模块,以实现参数的输入、输出和显示等功能。本发明实施例的HMI模块可以在现有技术基础上,通过自行设计显示界面以实现个性化、便利化的应用。并且,在实际使用时,HMI模块也需要配置相应的IP地址,比如可以为192.168.0.10等等。
可选的一种实施方式中,除HMI模块外,主控柜子系统的过程控制侧还配置有:
Profinet总线交换机、RS485总线模块、可编程逻辑控制器PLC、主控柜子系统模拟量输入模块、主控柜子系统模拟量输出模块、主控柜子系统数字量输入模块和主控柜子系统数字量输出模块。
关于过程控制侧上述各部件的作用,请结合现有器件的功能进行理解,在此不做详细说明。
在上述部件的基础上,主控柜子系统的过程控制侧还配置有:
主溢流阀、副溢流阀、主比例流量阀、副比例流量阀、主比例压力阀、副比例压力阀和用于监控并显示系统状态的三色警示灯;
其中,主溢流阀和副溢流阀分别用于切断主泵和副泵为后级阀组提供的液压源;主比例流量阀、主比例压力阀分别用于主泵液压回路流量及压力的控制,用于控制输送臂运动过程,并且在控制输送臂上、下过程时具有高速度、高稳定性、高负荷能力。具体的,通过增加主比例压力阀的压力输出,可实现高负荷能力,通过增加主比例流量阀的流量输出可实现高速运动能力,再通过两个比例阀之间的协调分配可实现高稳定性能力;副比例流量阀、副比例压力阀分别用于副泵液压回路流量及压力的控制,用于控制推车运动过程,并且在控制推车前后运动过程时具有高速度、高稳定性、高负荷能力。与上述类似,具体的,通过增加副比例压力阀的压力输出,可实现高负荷能力,通过增加副比例流量阀的流量输出可实现高速运动能力,再通过两个比例阀之间的协调分配可实现高稳定性能力;三色警示灯包括红色警示灯、黄色警示灯、绿色警示灯和蜂鸣器;红色警示灯、黄色警示灯和绿色警示灯点亮时分别表示停机、警示、系统运行,蜂鸣器为系统运行警告提供声音支持。
其中,需要补充说明的是,本发明实施例的可编程逻辑控制器PLC,具有设备的操作台控制和无线遥控器远程控制功能,即能够接受操作台子系统或无线操作子系统的操作控制指令,并实现相应的控制输出;可编程逻辑控制器PLC还具有调节液压模块的流量及压力的功能,通过控制主比例流量阀、副比例流量阀、主比例压力阀、副比例压力阀实现;具体的,可编程逻辑控制器PLC接收到操作指令后,通过主比例流量阀、副比例流量阀、主比例压力阀、副比例压力阀对猫道动作进行压力和流量分配,分配的流量和压力驱动对应动作执行,使得猫道可以实现平稳、高速、重载荷下来回动作80秒内完成,使得该可编程逻辑控制器PLC具有控制设备平稳运行,满足生产运行节拍以及满足特定条件下载重的能力。
为了便于理解主控柜子系统和相关部件的连接关系,请参见图2,图2为本发明实施例中主控柜子系统和相关部件连接关系的示意图。
图2中,主泵压力变送器、副泵压力变送器、温度变送器、液位变送器、主压力开关、副压力开关属于传感器子系统。
为了简化,图2中主控柜子系统的动力侧仅示意出了主电机控制回路、副电机控制回路和散热模块控制回路。其中,散热模块中双台空气冷却散热风扇包括空气冷却散热风扇1和空气冷却散热风扇2;散热模块控制回路包括液压油循环泵控制回路、空气冷却散热风扇1控制回路和空气冷却散热风扇2控制回路。
为了简化,图2中主控柜子系统的过程控制侧仅示意出了HMI模块、主溢流阀、副溢流阀、主比例流量阀、副比例流量阀、主比例压力阀、副比例压力阀和三色警示灯。
图2中,主控柜子系统的端口a用于连接底座中转箱子系统。端口b用于接收操作控制指令,其中,操作控制指令可以来自操作台子系统或无线操作子系统。
图2中主控柜子系统未示出的部件集成于主控柜子系统内部,在此不做具体说明。
(3)底座中转箱子系统
实际使用时,底座中转箱子系统可以用Base IO表示,相应的符号可以为BTB,其中,Base IO表示底座中转箱软件系统内名称,BTB为底座中转箱简称。同样的,底座中转箱子系统需要配置相应的IP地址才能实现通信功能,比如IP地址可以为192.168.0.2等等。
可选的一种实施方式中,底座中转箱子系统,包括:
底座中转箱子系统液压电磁阀组、底座中转箱子系统Profinet-IO接口模块和底座中转箱子系统数字量输出模块。
关于底座中转箱子系统Profinet-IO接口模块和底座中转箱子系统数字量输出模块的作用请结合现有器件的功能进行理解,在此不做详细说明。
其中,底座中转箱子系统液压电磁阀组,包括:左管架升阀、右管架升阀、左管架降阀、右管架降阀、左上料升阀、右上料升阀、左上料降阀、右上料降阀、左辅助出料升阀、右辅助出料升阀、左辅助出料降阀、右辅助出料降阀、输送臂升阀、输送臂降阀和绞车变排阀。
具体的,底座中转箱子系统液压电磁阀组中各液压电磁阀在相应的操作控制指令下可以开启或者关闭,在开启状态下,各液压电磁阀用于驱动相应的机械部件发生动作,具体的作用包括:
左管架升阀用于控制左侧管架的上升运动;右管架升阀用于控制右侧管架的上升运动;左管架降阀用于控制左侧管架的下降运动;右管架降阀用于控制右侧管架的下降运动;左上料升阀用于控制左侧上料装置的上升运动;右上料升阀用于控制右侧上料装置的上升运动;左上料降阀用于控制左侧上料装置的下降运动;右上料降阀用于控制右侧上料装置的下降运动;左辅助出料升阀用于控制左侧辅助出料装置的上升运动;右辅助出料升阀用于控制右侧辅助出料装置的上升运动;左辅助出料降阀用于控制左侧辅助出料装置的下降运动;右辅助出料降阀用于控制右侧辅助出料装置的下降运动;输送臂升阀用于控制输送臂的上升运动;输送臂降阀用于控制输送臂的下降运动;绞车变排阀用于控制绞车变换排缆绳,其作用在于根据操作指令需要猫道进行高载荷运动时,系统通过改变绞车排量来增大绞车载荷。本领域技术人员可以理解的是,上述各机械部件属于底座机械结构的一部分,和动作油缸集成安装在底座基础上,底座机械结构基础能为猫道系统提供很好的稳定性,且为输送臂上下提供稳定的支撑,本发明实施例将上述各机械动作整合为底座中转箱子系统,实现了模块化专配。
并且,可选的一种实施方式中,低限位传感器和输送臂模拟量位置编码器可以连接在底座中转箱子系统上。
而且,底座中转箱子系统可以与操作台子系统连接,通过相应的Profinet网络总线接收操作台子系统发送的操作控制指令,由主站的可编程逻辑控制器PLC下达动作指令,以控制上述各液压电磁阀的开启和关闭,实现驱动对应机械部件动作的目的。
关于底座中转箱子系统包括和连接的各部件请参见图3所示,具体在此不再重复说明。其中,为了简化,图3中仅示出了底座中转箱子系统液压电磁阀组的各个液压电磁阀,以及低限位传感器、输送臂模拟量位置编码器。图3中,端口c和端口a连接;端口d和操作台子系统连接;端口e和输送臂中转箱子系统连接。
关于本发明实施例中输送臂上升和下降的运动过程请结合图4和图5理解,图4为本发明实施例提供的可变调速液压驱动双绳动力猫道电控系统的输送臂上升示意曲线图;图5为本发明实施例提供的可变调速液压驱动双绳动力猫道电控系统的输送臂下降示意曲线图。
请参见图4,通过上升曲线可以看到输送臂上升过程,以及系统控制液压模块的过程。具体的,从图4的左侧向右侧进行,输送臂从位置0开始先线性加速至速度达到加速目标1,实现最大速度,然后平稳运行,直至达到减速点1时开始线性减速使得速度达到减速目标2,从而在拐点处以较小且平稳的拐点速度应对碰撞,减小机械部件的碰撞损伤;在碰撞结束后,再从加速点2开始线性加速使得速度达到加速目标2,实现最大速度,之后再次平稳运行,直至达到减速点2开始线性减速,直至减小速度至0,此时达到输送臂的最高点,该上升过程结束。压力在此过程中需要为过程提供载荷能力,工作压力为维持稳定运行的正常压力,由拐点前的减速,惯性的减少,在设备到达拐点后需要为输送臂增加载荷能力,使输送臂顺利跨越拐点。其中,拐点也是输送臂运行过程最大载荷点,也是输送臂撞击点。
请参见图5,通过下降曲线可以看到输送臂下降过程,以及系统控制液压模块的过程。具体的,从图5的右侧向左侧进行,输送臂从最高点开始先线性加速至速度达到加速目标1,实现最大速度,然后平稳运行,直至达到减速点1时开始线性减速使得速度减速至减速目标1,这时输送臂处于下降过程,为了减小下降速度和重力加速度带来的速度过快,此时的下降斜率较小,以避免以过大的速度进行碰撞,从而实现在拐点处以较小且平稳的拐点速度应对碰撞,减小机械部件的碰撞损伤;在碰撞结束后,再从加速点2开始线性加速使得速度达到加速目标2,实现最大速度,之后再次平稳运行,直至达到减速点2开始线性减速,直至减小速度至0,此时达到位置0处,该下降过程结束。压力在此过程中需要为过程提供载荷能力,工作压力为维持稳定运行的正常压力即可。
本发明实施例通过增加、减少压力值实现载荷能力的变化,通过调整液压模块流量实现上、下运行速度的调节。可见,本发明实施例的输送臂上升过程和下降过程大大解决了设备的运行稳定性。
(4)输送臂中转箱子系统
实际使用时,输送臂中转箱子系统可以用Conveyor Arm IO表示,相应的符号可以为CATB,其中,Conveyor Arm IO表示输送臂中转箱软件系统内名称,CATB为输送臂中转箱简称。同样的,输送臂中转箱子系统需要配置相应的IP地址才能实现通信功能,比如IP地址可以为192.168.0.3等等。
可选的一种实施方式中,输送臂中转箱子系统,包括:
输送臂中转箱子系统液压电磁阀组、输送臂中转箱子系统Profinet-IO接口模块和输送臂中转箱子系统数字量输出模块。
关于输送臂中转箱子系统Profinet-IO接口模块和输送臂中转箱子系统数字量输出模块的作用请结合现有器件的功能进行理解,在此不做详细说明。
其中,输送臂中转箱子系统液压电磁阀组,包括:左安全销升阀、右安全销升阀、左安全销降阀、右安全销降阀、左出料升阀、右出料升阀、左出料降阀、右出料降阀、推车前进阀和推车后退阀。
具体的,输送臂中转箱子系统液压电磁阀组中各液压电磁阀在相应的操作控制指令下可以开启或者关闭,在开启状态下,各液压电磁阀用于驱动相应的机械部件发生动作,具体的作用包括:
左安全销升阀用于控制左侧安全销的上升运动;右安全销升阀用于控制右侧安全销的上升运动;左安全销降阀用于控制左侧安全销的下降运动;右安全销降阀用于控制右侧安全销的下降运动;左出料升阀用于控制左侧出料装置的上升运动;右出料升阀用于控制右侧出料装置的上升运动;左出料降阀用于控制左侧出料装置的下降运动;右出料降阀用于控制右侧出料装置的下降运动;推车前进阀用于控制推车的前进运动;推车后退阀用于控制推车的后退运动。本领域技术人员可以理解的是,上述各机械部件属于输送臂机械机构的一部分,和动作油缸集成安装在输送臂结构中,输送臂结构能为猫道系统提供很好的上、下运动安全保证,且作为推车的行驶轨道,本发明实施例将上述各机械动作整合为输送臂中转箱子系统,实现了模块化专配。
并且,可选的一种实施方式中,高限位传感器和推车模拟量位置编码器可以连接在输送臂中转箱子系统上。
而且,输送臂中转箱子系统可以与底座中转箱子系统连接,通过底座中转箱子系统的Profinet总线网络接收操作台子系统等发送的操作控制指令,由主站的可编程逻辑控制器PLC下达动作指令以控制上述各液压电磁阀的开启和关闭,实现驱动对应机械部件动作的目的。
关于输送臂中转箱子系统包括和连接的各部件请参见图6所示,具体在此不再重复说明。其中,为了简化,图6中仅示出了输送臂中转箱子系统液压电磁阀组的各个液压电磁阀,以及高限位传感器、推车模拟量位置编码器。图6中,端口f和端口e连接。
需要说明的是,当系统的机械部件无动作执行时,包括主溢流阀、副溢流阀、主比例流量阀、副比例流量阀、主比例压力阀、副比例压力阀、底座中转箱子系统液压电磁阀组、输送臂中转箱子系统液压电磁阀组在内的多个阀门处于关闭状态,系统无压力流量,处于待机状态,这样能够大大减少能源损耗。
(5)操作台子系统
实际使用时,操作台子系统可以用Drilling Platform IO表示,相应的符号可以为CB,其中,Drilling Platform IO表示操作台软件系统内名称,CB为操作台简称。同样的,操作台子系统需要配置相应的IP地址才能实现通信功能,比如IP地址可以为192.168.0.4等等。
操作台子系统可以和被控子系统或者部件通过有线方式连接,具体的,操作台子系统可以输出操作控制指令给主控柜子系统等。
可选的一种实施方式中,操作台子系统,包括:
防爆操作台、操作台子系统Profinet-IO接口模块、操作台子系统数字量输出模块和操作台子系统数字量输入模块。
其中,防爆操作台上具有操作按键,可以输入相关指令信息。并且为了提高安全性,其具有防爆功能。关于操作台子系统Profinet-IO接口模块、操作台子系统数字量输出模块和操作台子系统数字量输入模块的作用请结合现有器件的功能进行理解,在此不做详细说明。
(6)无线操作子系统
可选的一种实施方式中,无线操作子系统,包括:
无线遥控器和内置于主控柜子系统的RS485总线无线接收器。
其中,无线遥控器作为发射器,其根据输入信息生成发射指令,该发射指令被内置于主控柜子系统的RS485总线无线接收器接收到作为操作控制指令。
本发明实施例中,操作台子系统和无线操作子系统组合为系统的有线操作控制模式和无线操作控制模式,使得系统做到双操作冗余,增加了便利性,同时能够避免单一操作控制模式损坏带来的系统运行故障状况。
(7)软件子系统
可选的一种实施方式中,软件子系统,包括:
PLC程序和HMI组态画面。
其中,PLC程序用于接收指令、信息处理、输出指令以及相关处理结果;HMI组态画面用于显示不同阶段的处理界面。
本发明实施例的PLC程序和HMI组态画面,是在现有产品基础上,根据场景需要进行相应的个性化设计得到的,其中,本发明实施例的PLC程序可以采用西门子PORTAL-V16,HMI组态画面可以采用昆仑通态McgsPro组态软件,等等。
为了便于理解本发明实施例中软件子系统的相关内容,请结合以下示意图理解。具体的:
图7为本发明实施例提供的可变调速液压驱动双绳动力猫道电控系统中Profinet和RS485系统网络配置示意图;从图7可以看到该系统包括主控柜子系统的过程控制侧(图7简写为主控柜过程控制侧),其配置有Profinet总线交换机(Profinet总线标记为PN/IE)、RS485总线模块、可编程逻辑控制器PLC、主控柜子系统模拟量输入模块(图7简写为模拟量输入模块)、主控柜子系统模拟量输出模块(图7简写为模拟量输出模块)、主控柜子系统数字量输入模块(图7简写为数字量输入模块)、主控柜子系统数字量输出模块(图7简写为数字量输出模块)。
底座中转箱子系统包括:底座中转箱子系统Profinet-IO接口模块(图7简写为Profinet-IO接口模块)、底座中转箱子系统数字量输出模块(图7简写为数字量输出模块)。
输送臂中转箱子系统包括:输送臂中转箱子系统Profinet-IO接口模块(图7简写为Profinet-IO接口模块)、输送臂中转箱子系统数字量输出模块(图7简写为数字量输出模块)。
操作台子系统包括:操作台子系统Profinet-IO接口模块(图7简写为Profinet-IO接口模块)、操作台子系统数字量输出模块(图7简写为数字量输出模块)、操作台子系统数字量输入模块(图7简写为数字量输入模块)。
无线操作子系统包括:RS485总线无线接收器和无线发射器。Modbus RTU表示一种开放的串行协议,协议使用RS-485 串行接口进行通信。
另外,图7中的HMI表示HMI模块,其上的MCGS表示昆仑通态McgsPro组态软件,192.168.0.10表示HMI模块的IP地址。
另外,图13为本发明实施例提供的可变调速液压驱动双绳动力猫道电控系统中昆仑通态McgsPro组态软件的系统HMI 信息界面-网络状态界面示意图。从图13可以清楚看到系统包括HMI组态画面的系统Information-Device Network(意为信息设备网络)画面,画面显示Profinet网络连接状态及模块检测,可以指导维护。
软件子系统,包含作为PLC程序的西门子PORTAL-V16、作为HMI组态画面的昆仑通态McgsPro组态软件。结合图1、图7、图13反映了系统通过Profinet协议网络联系起来,能很快速地进行数据的交互连接,通过图13的画面将网络状态及模块状态清晰示意,能够反映出其工作状态。本发明实施例用Profinet总线网络组合的系统减少了施工带来的错误及工作量,大大减少了维护难度。
图8为本发明实施例提供的可变调速液压驱动双绳动力猫道电控系统中昆仑通态McgsPro组态软件的系统HMI 用户界面示意图。从图8中可以清楚看到系统包括HMI组态画面的系统权限管理画面。图8画面通过用户登录按钮进行系统权限的登录。通过修改密码按钮进行当前用户登录权限的密码修改。通过管理用户按钮进行管理员权限下的系统其他用户的管理。通过用户退出按钮进行用户权限的退出。通过这四个按钮左侧的框显示系统运行模式及液压系统状态。其中,无线模式信息框可以显示无线操作控制模式即无线模式,或者显示有线操作控制模式即操作台模式;钻铤信息框可以显示钻铤或者钻杆;左侧信息框可以显示左侧或者右侧;正常模式信息框可以显示正常模式或者切限位模式;日期时间框用于显示年份、月份、日期和具体时间,比如10/27/2022 14:22:36表示2022年10月27日14点22分36秒。管理员Manager表示操作权限;OL表示油位,图8中以0.00m作为示意;MP表示主泵,图8中以0.0MPa作为示意;AP表示副泵,图8中以0.0MPa作为示意;TT表示温度变送器,图8中以0.0摄氏度作为示意。图8中下方的用户界面User、主界面Main、设置界面Set、操作记录Log、报警界面Alarm、信息界面Information分别表示相应的界面切换按钮。
图9为本发明实施例提供的可变调速液压驱动双绳动力猫道电控系统中昆仑通态McgsPro组态软件的系统HMI 主界面示意图。从图9可以清楚看到包括系统HMI组态画面的系统主界面。图9画面中能清楚看到主泵数据其包含主泵的运行、停止、故障状态,主泵目提供的液压模块压力和主泵提供的液压模块的流量。画面中能清楚看到副泵数据其包含副泵的运行、停止、故障状态、副泵目提供的液压模块压力和副泵提供的液压模块的流量。画面中能清楚看到散热模块数据其包含散热模块的运行、停止、故障状态。画面中能清楚看到输送臂位置及输送臂模拟量位置编码器的数值(画面以编码器数据表示)。画面中能清楚看到推车位置及推车模拟量位置编码器的数值(画面以编码器数据表示)。画面空白区域中能将设备执行的动作表示出来,内容为底座中转箱子系统液压电磁阀组中除了绞车变排阀之外的其余液压电磁阀,以及输送臂中转箱子系统液压电磁阀组中各个液压电磁阀。
图10为本发明实施例提供的可变调速液压驱动双绳动力猫道电控系统中昆仑通态McgsPro组态软件的系统HMI 设置界面示意图。从图10可以清楚看到系统包括HMI组态画面的系统设置界面。图10画面中系统温度设定栏对散热模块进行散热模块启动温度设置,散热模块停止温度设置,模块高温报警温度设置通过程序可以很好地对液压模块的散热进行管控。画面通过系统油位设定栏对系统油位进行系统油位高油位、低油位、极低油位设定,高油位用于反馈系统所需油位最高位,低油位用于反馈系统所需油位底限位,极低油位用于停主泵和副泵保护泵使用。画面中对输送臂位置设定,其中输送臂最高位(画面中以主臂最高点表示猫道提升高度的最高点)用于设定输送臂运动过程的最高位(输送臂移送至需求位置后点击确认即可完成),其余为监视流量及位置信息。画面通过对主泵和副泵进行相关工作设定,系统可进行工作泵选择,选择主泵和选择副泵用于泵的选择,确认选择用于确认所选择功能。画面中进行系统切除传感器设置,主要包括输送臂编码器(即输送臂模拟量位置编码器)、推车编码器(即推车模拟量位置编码器)、主钢丝绳维护,用于系统传感器错误导致系统无法继续作业设置。画面中编码器校准,通过输送臂编码器和推车编码器选择需要校准的编码器。
图11为本发明实施例提供的可变调速液压驱动双绳动力猫道电控系统中昆仑通态McgsPro组态软件的系统HMI 操作记录界面示意图。从图11可以清楚看到系统包括HMI组态画面的系统操作记录。图11画面通过框中记录显示目前操作动作。
图12为本发明实施例提供的可变调速液压驱动双绳动力猫道电控系统中昆仑通态McgsPro组态软件的系统HMI 报警界面示意图。从图12可以清楚看到系统包括HMI组态画面的系统报警界面。图12画面通过框中显示及记录系统报警,提示文本指导维护。
图13为本发明实施例提供的可变调速液压驱动双绳动力猫道电控系统中昆仑通态McgsPro组态软件的系统HMI 信息界面-网络状态界面示意图。从图13可以清楚看到系统包括HMI组态画面的系统信息界面-网络状态界面。画面通过Profinet网络错误信息窗口中的块显示系统网络错误及模块错误信息,指导维护。
本发明实施例提供了一种可变调速液压驱动双绳动力猫道电控系统,适用于所有液压驱动双绳式动力猫道。系统保护通过传感器子系统将系统信息采集进入主控柜子系统中进行分析、处理,并在HMI模块进行显示及保护参数的修改和确认;系统保护分析得出系统状态,通过所述操作台子系统或所述无线操作子系统接收操作控制指令,判断其携带的目前进入操作,继而可实现变调速液压驱动双绳动力猫道作业的平滑稳定。该系统能有效地对设备数据进行实时采集、分析,通过HMI模块及主控柜子系统、底座中转箱子系统和输送臂中转箱子系统实现设备的平滑稳定运行。本发明实施例提供的可变调速液压驱动双绳动力猫道电控系统具有通讯方式简单、操作简单、网络结构简单、易于维护、维护成本低、经久耐用、高效、安全等优点;同时可实现输送臂上下液压调速运动控制,能够减少运动过程中的惯性,实现软启停,能够提高动力猫道的运行平稳性,且系统可靠程度较高,能够节约能源且对制作工艺的要求较低,可以广泛运用在不同高度的石油钻机双绳动力猫道上,满足石油钻机安全可靠和稳定上下钻具的需求。
以上所述仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换、改进等,均包含在本发明的保护范围内。
Claims (10)
1.一种可变调速液压驱动双绳动力猫道电控系统,其特征在于,包括传感器子系统、主控柜子系统、底座中转箱子系统、输送臂中转箱子系统、操作台子系统、无线操作子系统和集成在所述主控柜子系统内的软件子系统;其中,
所述传感器子系统,用于监控并采集所述可变调速液压驱动双绳动力猫道电控系统中表征各部件状态的系统信息并提供给所述主控柜子系统内的所述软件子系统进行分析;
所述主控柜子系统,用于根据对所述系统信息进行分析和处理得到的系统状态以及接收到的操作控制指令,向所述主控柜子系统的动力侧和过程控制侧输出对应的操作指令,所述动力侧根据接收到的操作指令驱动液压模块;所述过程控制侧根据接收到的操作指令控制所述底座中转箱子系统和所述输送臂中转箱子系统;其中,所述过程控制侧配置有HMI模块,通过触摸屏方式显示系统保护监视及动作相关的状态;
所述底座中转箱子系统和所述输送臂中转箱子系统,用于接收所述主控柜子系统的过程控制侧的指令完成相应的操作指令,并驱动对应机械部件的动作;
所述操作台子系统和所述无线操作子系统,分别用于提供有线操作控制模式和无线操作控制模式,输出相应的操作控制指令给所述主控柜子系统;
所述软件子系统,用于为所述可变调速液压驱动双绳动力猫道电控系统提供信息分析、操作指令协调、速度调节、系统保护及可视化的软件支持。
2.根据权利要求 1所述的可变调速液压驱动双绳动力猫道电控系统,其特征在于,所述传感器子系统,包括:
保护及监测所述液压模块的温度变送器、液位变送器、主泵压力变送器、副泵压力变送器、主压力开关、副压力开关;其中,所述液压模块包括用于为整个系统提供液压动力源的主泵和副泵;
保护及监测输送臂的低限位传感器、高限位传感器、输送臂模拟量位置编码器、保护及监测推车的推车模拟量位置编码器。
3.根据权利要求2所述的可变调速液压驱动双绳动力猫道电控系统,其特征在于,所述主控柜子系统的动力侧配置有:
用于驱动主泵的主电机控制回路、用于驱动副泵的副电机控制回路、用于驱动液压油循环泵和双台空气冷却散热风扇的散热模块控制回路、过程控制侧DC供电回路和照明回路;
其中,所有电机回路均设有转动方向保护电路以及过载保护电路。
4.根据权利要求2所述的可变调速液压驱动双绳动力猫道电控系统,其特征在于,除所述HMI模块外,所述主控柜子系统的过程控制侧还配置有:
Profinet总线交换机、RS485总线模块、可编程逻辑控制器PLC、主控柜子系统模拟量输入模块、主控柜子系统模拟量输出模块、主控柜子系统数字量输入模块和主控柜子系统数字量输出模块。
5.根据权利要求4所述的可变调速液压驱动双绳动力猫道电控系统,其特征在于,所述主控柜子系统的过程控制侧还配置有:
主溢流阀、副溢流阀、主比例流量阀、副比例流量阀、主比例压力阀、副比例压力阀和用于监控并显示系统状态的三色警示灯;
其中,所述主溢流阀和所述副溢流阀分别用于切断主泵和副泵为后级阀组提供的液压源;所述主比例流量阀、所述主比例压力阀分别用于主泵液压回路流量及压力的控制,用于控制输送臂运动过程;所述副比例流量阀、所述副比例压力阀分别用于副泵液压回路流量及压力的控制,用于控制推车运动过程;所述三色警示灯包括红色警示灯、黄色警示灯、绿色警示灯和蜂鸣器;所述红色警示灯、所述黄色警示灯和所述绿色警示灯点亮时分别表示停机、警示、系统运行,所述蜂鸣器为系统运行警告提供声音支持。
6.根据权利要求 1所述的可变调速液压驱动双绳动力猫道电控系统,其特征在于,所述底座中转箱子系统,包括:
底座中转箱子系统液压电磁阀组、底座中转箱子系统Profinet-IO接口模块和底座中转箱子系统数字量输出模块;
其中,所述底座中转箱子系统液压电磁阀组,包括:左管架升阀、右管架升阀、左管架降阀、右管架降阀、左上料升阀、右上料升阀、左上料降阀、右上料降阀、左辅助出料升阀、右辅助出料升阀、左辅助出料降阀、右辅助出料降阀、输送臂升阀、输送臂降阀和绞车变排阀。
7.根据权利要求 1所述的可变调速液压驱动双绳动力猫道电控系统,其特征在于,所述输送臂中转箱子系统,包括:
输送臂中转箱子系统液压电磁阀组、输送臂中转箱子系统Profinet-IO接口模块和输送臂中转箱子系统数字量输出模块;
其中,所述输送臂中转箱子系统液压电磁阀组,包括:左安全销升阀、右安全销升阀、左安全销降阀、右安全销降阀、左出料升阀、右出料升阀、左出料降阀、右出料降阀、推车前进阀和推车后退阀。
8.根据权利要求 1所述的可变调速液压驱动双绳动力猫道电控系统,其特征在于,所述操作台子系统,包括:
防爆操作台、操作台子系统Profinet-IO接口模块、操作台子系统数字量输出模块和操作台子系统数字量输入模块。
9.根据权利要求 1所述的可变调速液压驱动双绳动力猫道电控系统,其特征在于,所述无线操作子系统,包括:
无线遥控器和内置于所述主控柜子系统的RS485总线无线接收器。
10.根据权利要求 1所述的可变调速液压驱动双绳动力猫道电控系统,其特征在于,所述软件子系统,包括:
PLC程序和HMI组态画面。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211471763.5A CN115538957A (zh) | 2022-11-23 | 2022-11-23 | 一种可变调速液压驱动双绳动力猫道电控系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211471763.5A CN115538957A (zh) | 2022-11-23 | 2022-11-23 | 一种可变调速液压驱动双绳动力猫道电控系统 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN115538957A true CN115538957A (zh) | 2022-12-30 |
Family
ID=84719647
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202211471763.5A Pending CN115538957A (zh) | 2022-11-23 | 2022-11-23 | 一种可变调速液压驱动双绳动力猫道电控系统 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115538957A (zh) |
-
2022
- 2022-11-23 CN CN202211471763.5A patent/CN115538957A/zh active Pending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101047175B1 (ko) | 무대장치 제어시스템 | |
| CN101560741B (zh) | 用于造纸机传动控制系统的流程控制方法 | |
| CN2881093Y (zh) | 钻机plc控制系统 | |
| CN110412962B (zh) | 一种一控多的提升集控系统 | |
| CN102385367A (zh) | 启闭机远程智能监测及反馈系统和方法 | |
| CN207817514U (zh) | 远程监测控制plc终端设备的系统 | |
| CN104836484B (zh) | 一种基于冗余备份的绳驱动系统及其控制方法 | |
| CN205787830U (zh) | 一种两立柱轨道提升机的控制装置 | |
| CN115538957A (zh) | 一种可变调速液压驱动双绳动力猫道电控系统 | |
| CN207652463U (zh) | 一种设备集中控制系统 | |
| CN109613900B (zh) | 一种刨煤作业综合监控系统及刨煤机作业综合监控中心 | |
| CN115628020B (zh) | 一种可变液压调速液缸顶升三钻具串联动力猫道电控系统 | |
| CN106933181A (zh) | 一种小型发动机拆装装置电气控制系统 | |
| CN203682922U (zh) | 一种智能化起重机控制装置 | |
| CN111190382A (zh) | 一种基于plc和触摸屏的多级升降转台伺服控制系统 | |
| CN207260101U (zh) | 水库水闸监控装置及其水闸 | |
| CN206033001U (zh) | 一种矿山立井提升机无人值守控制系统 | |
| CN203114598U (zh) | 水泵远程监控系统 | |
| CN202886971U (zh) | 轧机层流辊道电机监控系统 | |
| CN109299874A (zh) | 一种pms电站管理系统及方法、信息数据处理终端 | |
| CN102530570B (zh) | 一种悬臂取料机的控制系统 | |
| CN109057772A (zh) | 石油钻机交流变频直驱电机专用控制系统 | |
| CN104199376A (zh) | 一种智能捞钢系统 | |
| CN209313752U (zh) | 具有变频控制功能的液体电阻起动柜控制系统 | |
| CN208996715U (zh) | 一种石油钻机交流变频直驱电机专用控制系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |