CN114371483A - 激光雷达的测距方法、装置、激光雷达及机器人 - Google Patents
激光雷达的测距方法、装置、激光雷达及机器人 Download PDFInfo
- Publication number
- CN114371483A CN114371483A CN202210274320.0A CN202210274320A CN114371483A CN 114371483 A CN114371483 A CN 114371483A CN 202210274320 A CN202210274320 A CN 202210274320A CN 114371483 A CN114371483 A CN 114371483A
- Authority
- CN
- China
- Prior art keywords
- ranging
- light spot
- range
- spot
- result
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims abstract description 64
- 238000004364 calculation method Methods 0.000 claims description 31
- 238000005259 measurement Methods 0.000 claims description 19
- 238000004590 computer program Methods 0.000 claims description 8
- 238000004422 calculation algorithm Methods 0.000 description 16
- 238000010586 diagram Methods 0.000 description 13
- 238000003860 storage Methods 0.000 description 13
- 238000004891 communication Methods 0.000 description 10
- 238000004140 cleaning Methods 0.000 description 6
- 238000001914 filtration Methods 0.000 description 6
- 238000012545 processing Methods 0.000 description 6
- 230000008569 process Effects 0.000 description 5
- 239000000463 material Substances 0.000 description 4
- 238000010408 sweeping Methods 0.000 description 4
- 230000006870 function Effects 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 230000009286 beneficial effect Effects 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 230000007613 environmental effect Effects 0.000 description 2
- 230000004807 localization Effects 0.000 description 2
- 230000033001 locomotion Effects 0.000 description 2
- 238000013507 mapping Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 230000009466 transformation Effects 0.000 description 2
- 238000005406 washing Methods 0.000 description 2
- 229910052782 aluminium Inorganic materials 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000013500 data storage Methods 0.000 description 1
- 239000000428 dust Substances 0.000 description 1
- 238000010410 dusting Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 210000001061 forehead Anatomy 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000010295 mobile communication Methods 0.000 description 1
- 230000004297 night vision Effects 0.000 description 1
- 230000000474 nursing effect Effects 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 239000002245 particle Substances 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images











Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
- G01S17/10—Systems determining position data of a target for measuring distance only using transmission of interrupted, pulse-modulated waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/486—Receivers
- G01S7/4865—Time delay measurement, e.g. time-of-flight measurement, time of arrival measurement or determining the exact position of a peak
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Electromagnetism (AREA)
- Optical Radar Systems And Details Thereof (AREA)
Abstract
本申请实施例涉及激光雷达技术领域,公开了一种激光雷达的测距方法、装置、激光雷达及机器人,该激光雷达的测距方法通过获取测距目标的第一测距结果来确定光斑中心估计值,进而确定第一光斑范围,利用第一光斑范围来确定第二光斑范围,得到光斑中心计算值,以确定第二测距结果,其中,第二测距结果是测距目标的最终测距结果,本申请能够通过较小的计算量获得较高的测距精度,从而实现在不降低测距精度的情况下,降低激光雷达的成本。
Description
技术领域
本申请实施例涉及激光雷达技术领域,尤其涉及一种激光雷达的测距方法、装置、激光雷达及机器人。
背景技术
激光雷达,(Laser Detection and Ranging,LADAR)是工作在红外和可见光波段的,以激光为工作光束的雷达。激光雷达通过向目标发射探测信号(激光束),然后将接收到的从目标反射回来的信号(目标回波)与发射信号进行比较,作适当处理后,就可获得目标的有关信息,如目标距离、方位、高度、速度、姿态、甚至形状等参数,从而对飞机、导弹等目标进行探测、跟踪和识别。
目前,激光雷达的测距方式通常通过算法寻找光斑质心,首先需要先解决光斑分裂以及去除干扰源以获得真实目标的问题,由于情况非常复杂,激光针对不同材料、不同角度以及不同环境形成的光斑特征都有很大差异,所以需要较为复杂的算法,运算量非常大,对硬件要求较高。目前常见的算法有分水岭算法、小波变换以及金字塔算法,在这些算法之后,还是可能寻找到多个目标,还需要进一步根据其他特征来辨识真正目标。
发明人在实现本申请实施例的过程中,发现目前的技术方案至少存在以下技术问题:激光雷达的测距算法复杂,运算量大。
应该注意,上面对技术背景的介绍只是为了方便对本发明的技术方案进行清楚、完整的说明,并方便本领域技术人员的理解而阐述的。不能仅仅因为这些方案在本发明的背景技术部分进行了阐述而认为上述技术方案为本领域技术人员所公知。
发明内容
本申请实施例提供一种激光雷达的测距方法、装置、激光雷达及机器人,以通过较小的计算量获得较高的测距精度。
第一方面,本申请实施例中提供一种激光雷达的测距方法,方法包括:
获取测距目标的第一测距结果;
根据第一测距结果,确定第一图像中的测距目标的光斑中心估计值;
根据第一测距结果和光斑中心估计值,确定第一光斑范围;
根据第一光斑范围,搜索光斑边界,以确定第二光斑范围;
根据第二光斑范围,确定第一图像中的测距目标的光斑中心计算值;
根据光斑中心计算值,确定第二测距结果,其中,第二测距结果是测距目标的最终测距结果。
在一些实施例中,根据第一测距结果,确定第一图像中的测距目标的光斑中心估计值,包括:

其中, 为第一图像中的测距目标的光斑中心估计值,
为第一图像中的测距目标的光斑中心估计值, 为第一参数,
为第一参数, 为第二参数,
为第二参数, 为第一测距结果,
为第一测距结果, 为像元宽度。
为像元宽度。
在一些实施例中,方法还包括:
建立查找表,其中,查找表包括测距结果与搜索宽度的对应关系,其中,测距结果包括TOF测距值。
在一些实施例中,根据第一测距结果和光斑中心估计值,确定第一光斑范围,包括:
根据查找表,查找第一测距结果对应的第一搜索宽度;
根据光斑中心估计值和第一测距结果对应的第一搜索宽度,确定第一光斑范围。
在一些实施例中,方法还包括:
根据第一图像的第一光斑范围内的光斑特征,调整第一光斑范围,以得到调整后的第一光斑范围。
在一些实施例中,查找表包括测距结果、搜索宽度与光斑特征调整参数的对应关系,根据第一图像的第一光斑范围内的光斑特征,调整第一光斑范围,以得到调整后的第一光斑范围,包括:
搜索第一光斑范围内的光斑特征;
根据第一搜索宽度,结合第一光斑范围内的光斑特征以及第一测距结果对应的光斑特征调整参数,确定第二搜索宽度;
根据第二搜索宽度,确定调整后的第一光斑范围。
在一些实施例中,光斑特征包括最大亮度,光斑特征调整参数包括最大亮度调整参数,根据第一搜索宽度,结合第一光斑范围内的光斑特征以及第一测距结果对应的光斑特征调整参数,确定第二搜索宽度,包括:
第二搜索宽度=第一搜索宽度+最大亮度*最大亮度调整参数。
在一些实施例中,根据光斑中心计算值,确定第二测距结果,包括:

其中, 为第二测距结果,
为第二测距结果, 为第一参数,
为第一参数, 为第二参数,
为第二参数, 为像元宽度,
为像元宽度, 为光斑中心计算值。
为光斑中心计算值。
第二方面,本申请实施例提供一种激光雷达的测距装置,装置包括:
测距结果获取单元,用于获取测距目标的第一测距结果;
光斑中心估计单元,用于根据第一测距结果,确定第一图像中的测距目标的光斑中心估计值;
第一光斑范围确定单元,用于根据第一测距结果和光斑中心估计值,确定第一光斑范围;
第二光斑范围确定单元,用于根据第一光斑范围,搜索光斑边界,以确定第二光斑范围;
光斑中心计算单元,用于根据第二光斑范围,确定第一图像中的测距目标的光斑中心计算值;
测距结果确定单元,用于根据光斑中心计算值,确定第二测距结果,其中,第二测距结果是测距目标的最终测距结果。
第三方面,本申请实施例提供一种激光雷达,包括:
存储器以及一个或多个处理器,一个或多个处理器用于执行存储在存储器中的一个或多个计算机程序,一个或多个处理器在执行一个或多个计算机程序时,使得激光雷达实现如第一方面的激光雷达的测距方法。
第四方面,本申请实施例提供一种机器人,包括:
如第三方面的激光雷达。
第五方面,本申请实施例提供一种计算机可读存储介质,计算机可读存储介质存储有计算机程序,计算机程序包括程序指令,程序指令当被处理器执行时使处理器执行如第一方面的激光雷达的测距方法。
本申请实施例的有益效果:区别于现有技术的情况,本申请实施例提供的一种激光雷达的测距方法,该方法包括:获取测距目标的第一测距结果;根据第一测距结果,确定第一图像中的测距目标的光斑中心估计值;根据第一测距结果和光斑中心估计值,确定第一光斑范围;根据第一光斑范围,搜索光斑边界,以确定第二光斑范围;根据第二光斑范围,确定第一图像中的测距目标的光斑中心计算值;根据光斑中心计算值,确定第二测距结果,其中,第二测距结果是测距目标的最终测距结果。通过获取测距目标的第一测距结果来确定光斑中心估计值,进而确定第一光斑范围,进一步确定第二光斑范围,得到光斑中心计算值,以确定第二测距结果,其中,第二测距结果是测距目标的最终测距结果,本申请能够通过较小的计算量获得较高的测距精度,从而实现在不降低测距精度的情况下,降低激光雷达的成本。
附图说明
一个或多个实施例通过与之对应的附图中的图片进行示例性说明,这些示例性说明并不构成对实施例的限定,附图中具有相同参考数字标号的元件表示为类似的元件,除非有特别申明,附图中的图不构成比例限制。
图1是本申请实施例提供的一种激光雷达的测距方法的应用环境示意图;
图2是本申请实施例提供的一种激光雷达的测距方法的流程示意图;
图3是图2中的步骤S203的细化流程示意图;
图4是本申请实施例提供的一种调整第一光斑范围的流程示意图;
图5是本申请实施例提供的一种光斑边界的示意图;
图6a是本申请实施例提供的一种光斑分裂的示意图;
图6b是本申请实施例提供的一种干扰点的示意图;
图7是本申请实施例提供的另一种激光雷达的测距方法的流程示意图;
图8是本申请实施例提供的一种激光雷达的测距装置的结构示意图;
图9是本申请实施例提供的一种激光雷达的硬件结构示意图;
图10是本申请实施例提供的一种机器人的结构示意图。
具体实施方式
下面结合具体实施例对本申请进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本申请,但不以任何形式限制本申请。应当指出的是,对本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进。这些都属于本申请的保护范围。
为了使本申请的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本申请进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本申请,并不用于限定本申请。
需要说明的是,如果不冲突,本申请实施例中的各个特征可以相互结合,均在本申请的保护范围之内。另外,虽然在装置示意图中进行了功能模块划分,在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于装置中的模块划分,或流程图中的顺序执行所示出或描述的步骤。此外,本文所采用的“第一”、“第二”、“第三”等字样并不对数据和执行次序进行限定,仅是对功能和作用基本相同的相同项或相似项进行区分。
除非另有定义,本说明书所使用的所有的技术和科学术语与属于本申请的技术领域的技术人员通常理解的含义相同。本说明书中在本申请的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是用于限制本申请。本说明书所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
此外,下面所描述的本申请各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
下面结合说明书附图具体阐述本申请的技术方案。
请参阅图1,图1是本申请实施例提供的一种激光雷达的测距方法的应用环境示意图;
如图1所示,该应用环境包括:机器人10和测距目标20,该机器人上安装有激光雷达11,该激光雷达11用于为对测距目标20进行测距。其中,机器人10可以被构造成任何合适形状,以便实现特定业务功能操作,例如,在一些实施例中,本发明实施例的机器人10包括移动机器人,例如:清洁机器人等,其中,清洁机器人包括且不限于扫地机器人、吸尘机器人、拖地机器人以及洗地机器人等等。
机器人10可以为基于SLAM系统的移动机器人。在本申请实施例中,该机器人10包括移动机器人,例如:清洁机器人、宠物机器人、搬运机器人、看护机器人、远程监控机器人、扫地机器人等机器人。其中,清洁机器人包括且不限于扫地机器人、吸尘机器人、拖地机器人或洗地机器人。
其中,该机器人包括主体和驱动轮部件、摄像单元、传感单元、激光雷达、通信模块以及控制器。主体的外形可以大体上呈椭圆形、三角形、D形或其他形状。控制器设置于主体,主体是机器人的主体结构,可以根据机器人10的实际需要,选用相应的形状结构及制造材质(如硬质塑料或者铝、铁等金属),例如设置为扫地机器人常见的较为扁平的圆柱形。驱动轮部件安装于主体,用于驱动机器人移动,若机器人为清洁机器人,则驱动轮部件驱动机器人在待清洁面上移动,其中,待清洁面可以是较为光滑的地板表面、铺设有地毯的表面以及其他需要清洁的表面。
在本申请实施例中,驱动轮部件包括左驱动轮、右驱动轮及全向轮,左驱动轮和右驱动轮分别安装于主体的相对两侧。全向轮安装于主体的底部的靠前位置,全向轮为活动脚轮,可以水平360度旋转,以使得机器人可以灵活转向。左驱动轮、右驱动轮及全向轮的安装构成三角形,以提高机器人行走的平稳性。
在本申请实施例中,摄像单元,设置于机器人的机身,用于获取图像数据和/或视频数据。其中,摄像单元通信连接控制器,用于获取摄像单元的覆盖范围内的图像数据和/或视频数据,例如:获取某一密闭空间内的图像数据和/或视频数据,或者,获取某一开放空间内的图像数据和/或视频数据,并将获取到的图像数据和/或视频数据发送到控制器。在本申请实施例中,摄像单元包括但不限于红外摄像头、夜视摄像头、网络摄像头、数字摄像头、高清摄像头、4K摄像头、8K高清摄像头等摄像装置。
在本申请实施例中,传感单元,用于采集机器人的一些运动参数及环境空间各类数据,传感单元包括各类合适传感器,诸如陀螺仪、红外传感器、里程计、磁场计、加速度计或速度计等等。
在本申请实施例中,激光雷达11通信连接控制器,该激光雷达11设置于机器人10的机身,用于感知移动机器人10周围环境的障碍物情况,获得障碍物信息,例如:激光雷达11设置于机器人10的机身的移动底盘,该激光雷达11用于获取激光点云数据,以及用于向目标发射探测信号(激光束),然后将接收到的从目标反射回来的信号(目标回波)与发射信号进行比较,以进行测距。具体的,激光雷达11用于获取监控范围内的激光点云数据,机器人10的机身的移动底盘设置有通信模块,激光雷达获取的激光点云数据通过通信模组发送到控制器。在本申请实施例中,激光雷达11包括脉冲激光雷达、连续波激光雷达等雷达,移动底盘包括全能型通用底盘、拱腰式移动底盘等机器人移动底盘。
在本申请实施例中,通信模块,通信连接移动终端以及服务器,用于接收移动终端和服务器发送的数据,例如:接收服务器发送的环境地图;或者,向移动终端和服务器发送数据,例如:向服务器路径信息。在本申请实施例中,通信模块可以实现与因特网、互联网的通信,其中,通信模块包括但不限于WIFI模块、ZigBee模块、NB_IoT模块、4G模块、5G模块、蓝牙模块等通信单元。
在本申请实施例中,控制器设置于主体内部,是内置于机器人主体中的电子计算核心,用于执行逻辑运算步骤以实现机器人的智能化控制。其中,控制器分别与左驱动轮、右驱动轮以及全向轮电连接。控制器作为机器人的控制核心,用于控制机器人行走、后退以及一些业务逻辑处理。例如:控制器用于接收摄像单元发送的图像数据和/或视频数据,并接收激光雷达发送的激光点云数据,并根据激光点云数据,构建环境地图。其中,控制器通过同步定位与建图技术(Simultaneous Localization and Mapping,SLAM),即激光SLAM算法对监控区域的激光点云数据进行运算,以构建环境地图。在本申请实施例中,激光SLAM算法包括卡尔曼滤波、粒子滤波、图优化方法。
在本申请实施例中,控制器可以为通用处理器、数字信号处理器(DSP)、专用集成电路(ASIC)、现场可编程门阵列(FPGA)、单片机、ARM(Acorn RISC Machine)或其它可编程逻辑器件、分立门或晶体管逻辑、分立的硬件组件或者这些部件的任何组合。控制器还可以是任何传统处理器、控制器、微控制器或状态机。控制器也可以被实现为计算设备的组合,例如,DSP和微处理器的组合、多个微处理器、一个或多个微处理器结合DSP和/或任何其它这种配置,或者微控制单元(Microcontroller Unit,MCU)、现场可编程门阵列(Field-Programmable Gate Array,FPGA)、系统级芯片(System on Chip,SoC)中的一种或多种组合。
可以理解的是,本申请实施例中的机器人10还包括存储模块,存储模块包括但不限于:FLASH闪存、NAND闪存、垂直NAND闪存(VNAND)、NOR闪存、电阻随机存取存储器(RRAM)、磁阻随机存取存储器(MRAM)、铁电随机存取存储器(FRAM)、自旋转移扭矩随机存取存储器(STT-RAM)等设备中的一种或多种。
在本申请实施例中,上述机器人10在活动的过程中,控制器采用同步定位与建图技术(Simultaneous Localization and Mapping,SLAM),即激光SLAM算法进行定位导航,根据环境数据构建地图和定位。
需要说明的是,根据所要完成的任务,除了以上的功能模组以外,机器人的主体上还可以搭载一个或者多个其它不同的功能模组(如储水箱、清扫装置等),相互配合用以执行相应的任务。
目前,激光雷达的测距算法复杂,运算量大,有鉴于此,本申请实施例提供一种激光雷达的测距方法,以通过较小的计算量获得较高的测距精度。
具体的,请参阅图2,图2是本申请实施例提供的一种激光雷达的测距方法的流程示意图;
其中,该激光雷达的测距方法,应用于上述的激光雷达,激光雷达安装于机器人,具体的,该激光雷达的测距方法的执行主体为该激光雷达的控制器中的一个或多个处理器。
如图2所示,该激光雷达的测距方法,包括:
步骤S201:获取测距目标的第一测距结果;
其中,测距目标的第一测距结果包括TOF测距值,具体的,激光雷达通过测量飞行时间(Time Of Flight,TOF)的方式,即测量发射脉冲与接收脉冲的时间间隔,结合激光光束的飞行速度,从而获取测距目标的TOF测距值。
或者,通过直接测量飞行时间(Direct Time Of Flight,DTOF)的方式,即直接以传感器输出乘以分辨率获得距离,以得到TOF测距值。
步骤S202:根据第一测距结果,确定第一图像中的测距目标的光斑中心估计值;
具体的,假设测距结果为TOF测距值 ,则可以根据TOF测距值
,则可以根据TOF测距值 以及三角测距公式中的已知参数,已知参数包括第一参数
以及三角测距公式中的已知参数,已知参数包括第一参数 、第二参数
、第二参数 以及像元宽度
以及像元宽度 ,得到第一图像中的测距目标的光斑中心估计值,由第一测距结果推算光斑中心估计值的原理如下:
,得到第一图像中的测距目标的光斑中心估计值,由第一测距结果推算光斑中心估计值的原理如下:
对三角测距公式 进行变换并带入测距结果
进行变换并带入测距结果 ,可以推导出
,可以推导出 的计算公式为:
的计算公式为:

则可以得出:根据第一测距结果,确定第一图像中的测距目标的光斑中心估计值,包括:

其中, 为第一图像中的测距目标的光斑中心估计值,
为第一图像中的测距目标的光斑中心估计值, 为第一参数,
为第一参数, 为第二参数,
为第二参数, 为第一测距结果,
为第一测距结果, 为像元宽度。
为像元宽度。
可以理解的是,对于固定系统来说,像元宽度 为常数。本申请实施例还预先标定激光雷达的参数,其中,第一参数
为常数。本申请实施例还预先标定激光雷达的参数,其中,第一参数 以及第二参数
以及第二参数 均为激光雷达标定之后的参数。
均为激光雷达标定之后的参数。
步骤S203:根据第一测距结果和光斑中心估计值,确定第一光斑范围;
其中,第一光斑范围为初始光斑搜索范围,初始光斑搜索范围由光斑中心估计值和第一测距结果对应的搜索宽度确定。具体的,请再参阅图3,图3是图2中的步骤S203的细化流程示意图;
如图3所示,该步骤S203:根据第一测距结果和光斑中心估计值,确定第一光斑范围,包括:
步骤S2031:根据查找表,查找第一测距结果对应的第一搜索宽度;
具体的,预先建立查找表,其中,该查找表包括测距结果与搜索宽度的对应关系,如下表1所示:
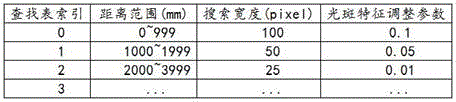
表1
其中,距离范围指的是测距结果的距离范围,即通过获取第一测距结果,可以通过查找该查找表中与第一测距结果对应的距离范围,此时,可以确定第一测距结果对应的第一搜索宽度。
步骤S2032:根据光斑中心估计值和第一测距结果对应的第一搜索宽度,确定第一光斑范围。
具体的,第一光斑范围为[光斑中心估计值-第一搜索宽度,光斑中心估计值+第一搜索宽度],例如:假设第一光斑范围为A1,光斑中心估计值为 ,第一测距结果为TOF测距值
,第一测距结果为TOF测距值 ,则在查找表中找到TOF测距值
,则在查找表中找到TOF测距值 对应的距离范围,从而确定对应的搜索宽度。比如:当TOF测距值
对应的距离范围,从而确定对应的搜索宽度。比如:当TOF测距值 为1500mm时,适用于索引1对应的距离范围,此时搜索宽度为50像素,则第一光斑范围A1=[cx_pixel2-50, cx_pixel2+50]。
为1500mm时,适用于索引1对应的距离范围,此时搜索宽度为50像素,则第一光斑范围A1=[cx_pixel2-50, cx_pixel2+50]。
进一步地,为了避免第一光斑范围的误差,本申请实施例还利用第一光斑范围内的光斑特征,来调整第一光斑范围,以得到调整后的第一光斑范围。
具体的,如上表1所示,该查找表还包括测距结果、搜索宽度与光斑特征调整参数的对应关系,根据第一图像的第一光斑范围内的光斑特征,调整第一光斑范围,以得到调整后的第一光斑范围。
在本申请实施例中,查找表包括但不限于距离或等效距离分段,即测距结果;对应分段的搜索边界宽度,即搜索宽度;对应分段的根据光斑特征调整的搜索边界参数,即光斑特征调整参数。
请再参阅图4,图4是本申请实施例提供的一种调整第一光斑范围的流程示意图;
如图4所示,调整第一光斑范围,包括:
步骤S401:搜索第一光斑范围内的光斑特征;
可以理解的是,同种材质情况下,光斑大小与距离成反比,因此初始搜索范围就可以根据距离设置不同值,距离越远,范围越小;同时,在同样距离下,打在不同材质上的光斑亮度和大小差异比较大且成正比。因此,在本申请实施例中,光斑特征包括最大亮度。根据搜索范围内的最大亮度值,调整搜索范围,最大亮度越大,搜索范围就越大。
步骤S402:根据第一搜索宽度,结合第一光斑范围内的光斑特征以及第一测距结果对应的光斑特征调整参数,确定第二搜索宽度;
具体的,第二搜索宽度=第一搜索宽度+光斑特征*光斑特征调整参数,例如:光斑特征为最大亮度值,则第二搜索宽度=第一搜索宽度+最大亮度*最大亮度调整参数。假设第一光斑范围内的最大亮度值peakmax=200,则如上表1所示,当TOF测距值 为1500mm时,适用于索引1对应的距离范围,此时第一搜索宽度为50像素,光斑特征调整参数为0.05,则第二搜索宽度=50+200*0.05=60。
为1500mm时,适用于索引1对应的距离范围,此时第一搜索宽度为50像素,光斑特征调整参数为0.05,则第二搜索宽度=50+200*0.05=60。
步骤S403:根据第二搜索宽度,确定调整后的第一光斑范围。
具体的,调整后的第一光斑范围=[光斑中心估计值-第二搜索宽度,光斑中心估计值+第二搜索宽度],例如:第二搜索宽度为60,则调整后的第一光斑范围为[光斑中心估计值-60,光斑中心估计值+60]。
步骤S204:根据第一光斑范围,搜索光斑边界,以确定第二光斑范围;
具体的,对第一光斑范围内的图像进行扫描,以搜索光斑边界。
请再参阅图5,图5是本申请实施例提供的一种光斑边界的示意图;
如图5所示,其中,横坐标为像素索引,即像素对应的序号,纵坐标为亮度,则光斑边界为亮度发生突变的位置。
在本申请实施例中,确定光斑边界的方式包括但不限于设定亮度阈值或者亮度梯度阈值,例如:亮度阈值可以设定为固定值,或者设定为最大亮度的百分比,超过阈值的就是光斑,则不超过阈值的部分作为光斑边界。
或者,亮度梯度阈值需要分别针对左右两侧设定,可以设定为固定值,也可以设定为极值,则可以确定亮度变化最大的位置作为光斑边界。
可以理解的是,光斑边界包括两个,在搜索到两个光斑边界之后,确定两个光斑边界之间的位置作为第二光斑范围。
步骤S205:根据第二光斑范围,确定第一图像中的测距目标的光斑中心计算值;
具体的,对第二光斑范围内的图像进行计算,以确定第一图像中的测距目标的光斑中心计算值。在本申请实施例中,确定光斑中心计算值由光斑中心算法处理得到,其中,光斑中心算法包括但不限于利用亮度做权重的计算方法、高斯加权质心定位方法等,具体的,高斯加权质心定位方法包括:对第二光斑范围内的图像的像素的灰度值进行高斯滤波,得到高斯滤波之后的灰度值计算光斑中心计算值。
步骤S206:根据光斑中心计算值,确定第二测距结果,其中,第二测距结果是测距目标的最终测距结果。
具体的,根据光斑中心计算值,确定第二测距结果,包括:

其中, 为第二测距结果,
为第二测距结果, 为第一参数,
为第一参数, 为第二参数,
为第二参数, 为像元宽度,
为像元宽度, 为光斑中心计算值。
为光斑中心计算值。
可以理解的是,第二测距结果是基于第一测距结果进行计算得到的测距结果,因此,第二测距结果的测距精度高于第一测距结果的测距精度,并且,通过第一测距结果,确定光斑中心估计值,由光斑中心估计值进一步确定光斑中心计算值,以得到第二测距结果,相比现有的技术方案而言,无需寻找多个目标进一步根据其他特征来辨识真正目标,减少了计算量,使得本申请能够通过较小的计算量来得到较高的测距精度。
在本申请实施例中,通过获取测距目标的第一测距结果来确定光斑中心估计值,进而确定第一光斑范围,利用第一光斑范围来确定第二光斑范围,得到光斑中心计算值,以确定第二测距结果,其中,第二测距结果是测距目标的最终测距结果,本申请能够通过较小的计算量获得较高的测距精度,从而实现在不降低测距精度的情况下,降低激光雷达的成本。
可以理解的是,请一并参阅图6a和图6b,图6a是本申请实施例提供的一种光斑分裂的示意图;图6b是本申请实施例提供的一种干扰点的示意图;
可以理解的是,如图6a所示,光斑分裂容易导致多峰的现象出现,影响光斑范围的准确性,而如图6b所示,干扰光斑和真实光斑共同存在时,干扰光斑容易影响真实光斑的位置的准确性。
在本申请实施例中,由于通过第一测距结果,即TOF测距值进行处理,本申请能够不受光斑分裂的干扰,并且,能够排除干扰光斑,获得的光斑中心位置估计值;根据光斑中心位置估计值,选择合适的可能光斑范围;通过简单算法,搜索光斑边界并计算获得精确的光斑中心位置并用三角测距原理获得测距结果,使得整体算力需求降低至低成本单片机可实现的范围,使得本申请实施例能够通过较小的计算量获得较高的测距精度,从而实现在不降低测距精度的情况下,降低激光雷达的成本。
具体的,请再参阅图7,图7是本申请实施例提供的另一种激光雷达的测距方法的流程示意图;
如图7所示,该激光雷达的测距方法,包括:
步骤S701:标定测距结果与光斑位置的对应关系,以建立查找表;
具体的,查找表包括:查找表索引、测距结果、搜索宽度以及光斑特征调整参数,其中,查找表索引即查找表中的序号,例如:序号从0-N,测距结果对应一个距离范围,光斑特征调整参数对应一个光斑特征,例如:最大亮度。
步骤S702:标定测距公式中的参数;
具体的,该测距公式包括三角测距公式,标定测距公式中的参数,包括:
根据三角法测距原理,可以得到三角测距公式:

其中, 、
、 分别为需要标定的第一参数、第二参数,
分别为需要标定的第一参数、第二参数, 为像元宽度,对固定系统来说是常数,
为像元宽度,对固定系统来说是常数, 为图像传感器的光斑中心点位置。
为图像传感器的光斑中心点位置。
通过获取原始标定参数,再获取两组理论距离值和实际测距值,可以求解得到标定之后的第一参数和第二参数。
步骤S703:根据第一测距结果,搜索查找表以得到第一测距结果对应的第一搜索宽度;
具体的,根据第一测距结果所处的距离范围,从查找表中找到对应的距离范围,从而确定第一测距结果对应的第一搜索宽度。
步骤S704:根据第一测距结果和第一搜索宽度,确定第一光斑范围;
具体的,根据第一测距结果,确定第一图像中的测距目标的光斑中心估计值。
假设测距结果为TOF测距值 ,则可以根据TOF测距值
,则可以根据TOF测距值 以及三角测距公式中的已知参数,已知参数包括第一参数
以及三角测距公式中的已知参数,已知参数包括第一参数 、第二参数
、第二参数 以及像元宽度
以及像元宽度 ,得到第一图像中的测距目标的光斑中心估计值,由第一测距结果推算光斑中心估计值的原理如下:
,得到第一图像中的测距目标的光斑中心估计值,由第一测距结果推算光斑中心估计值的原理如下:
对三角测距公式 进行变换并带入测距结果
进行变换并带入测距结果 ,可以推导出
,可以推导出 的计算公式为:
的计算公式为:

则可以得出:根据第一测距结果,确定第一图像中的测距目标的光斑中心估计值,包括:

其中, 为第一图像中的测距目标的光斑中心估计值,
为第一图像中的测距目标的光斑中心估计值, 为第一参数,
为第一参数, 为第二参数,
为第二参数, 为第一测距结果,
为第一测距结果, 为像元宽度。
为像元宽度。
可以理解的是,对于固定系统来说,像元宽度 为常数。本申请实施例还预先标定激光雷达的标定参数,其中,第一参数
为常数。本申请实施例还预先标定激光雷达的标定参数,其中,第一参数 以及第二参数
以及第二参数 均为激光雷达标定之后的标定参数。
均为激光雷达标定之后的标定参数。
进一步地,根据光斑中心估计值、第一搜索宽度,确定第一光斑范围,其中,第一光斑范围为[光斑中心估计值-第一搜索宽度,光斑中心估计值+第一搜索宽度]。
步骤S705:根据第一光斑范围内的光斑特征,得到调整后的第一光斑范围;
具体的,搜索第一光斑范围内的光斑特征,根据第一搜索宽度,结合第一光斑范围内的光斑特征以及第一测距结果对应的光斑特征调整参数,确定第二搜索宽度,根据第二搜索宽度,确定调整后的第一光斑范围。
步骤S706:根据调整后的第一光斑范围,搜索光斑边界,以确定第二光斑范围;
具体的,对调整后的第一光斑范围的图像进行扫描,以搜索光斑边界,在搜索到两个光斑边界之后,确定两个光斑边界之间的位置作为第二光斑范围。
步骤S707:根据第二光斑范围,确定第一图像中的测距目标的额光斑中心计算值;
具体的,对第二光斑范围内的图像进行计算,以确定第一图像中的测距目标的光斑中心计算值。在本申请实施例中,确定光斑中心计算值由光斑中心算法处理得到,其中,光斑中心算法包括但不限于利用亮度做权重的计算方法、高斯加权质心定位方法等,具体的,高斯加权质心定位方法包括:对第二光斑范围内的图像的像素的灰度值进行高斯滤波,得到高斯滤波之后的灰度值计算光斑中心计算值。
步骤S708:根据光斑中心计算值,确定第二测距结果,其中,第二测距结果是测距目标的最终测距结果。
具体的,根据光斑中心计算值,确定第二测距结果,包括:

其中, 为第二测距结果,
为第二测距结果, 为第一参数,
为第一参数, 为第二参数,
为第二参数, 为像元宽度,
为像元宽度, 为光斑中心计算值。
为光斑中心计算值。
通过标定测距结果与光斑位置的对应关系,以建立查找表,进一步标定测距公式中的参数,以根据测距目标的第一测距结果来确定光斑中心估计值,进而确定第一光斑范围,并利用光斑特征来得到调整后的第一光斑范围,利用调整后的第一光斑范围来确定第二光斑范围,得到光斑中心计算值,以确定第二测距结果,其中,第二测距结果是测距目标的最终测距结果,本申请能够通过较小的计算量获得较高的测距精度,从而实现在不降低测距精度的情况下,降低激光雷达的成本。
在本申请实施例中,通过提供一种激光雷达的测距方法,包括:获取测距目标的第一测距结果;根据第一测距结果,确定第一图像中的测距目标的光斑中心估计值;根据第一测距结果和光斑中心估计值,确定第一光斑范围;根据第一光斑范围,搜索光斑边界,以确定第二光斑范围;根据第二光斑范围,确定第一图像中的测距目标的光斑中心计算值;根据光斑中心计算值,确定第二测距结果,其中,第二测距结果是测距目标的最终测距结果。通过获取测距目标的第一测距结果来确定光斑中心估计值,进而确定第一光斑范围,进一步确定第二光斑范围,得到光斑中心计算值,以确定第二测距结果,本申请能够通过较小的计算量获得较高的测距精度,从而实现在不降低测距精度的情况下,降低激光雷达的成本。
请参阅图8,图8是本申请实施例提供的一种激光雷达的测距装置的结构示意图;
其中,该激光雷达的测距装置,应用于激光雷达,具体的,该激光雷达的测距装置应用于激光雷达的一个或多个处理器。
如图8所示,该激光雷达的测距装置80,应用于激光雷达,该激光雷达安装于机器人,该装置包括:
测距结果获取单元801,用于获取测距目标的第一测距结果;
光斑中心估计单元802,用于根据第一测距结果,确定第一图像中的测距目标的光斑中心估计值;
第一光斑范围确定单元803,用于根据第一测距结果和光斑中心估计值,确定第一光斑范围;
第二光斑范围确定单元804,用于根据第一光斑范围,搜索光斑边界,以确定第二光斑范围;
光斑中心计算单元805,用于根据第二光斑范围,确定第一图像中的测距目标的光斑中心计算值;
测距结果确定单元806,用于根据光斑中心计算值,确定第二测距结果,其中,第二测距结果是测距目标的最终测距结果。
在本申请实施例中,激光雷达的测距装置亦可以由硬件器件搭建成的,例如,激光雷达的测距装置可以由一个或两个以上的芯片搭建而成,各个芯片可以互相协调工作,以完成上述各个实施例所阐述的激光雷达的测距方法。再例如,激光雷达的测距装置还可以由各类逻辑器件搭建而成,诸如由通用处理器、数字信号处理器(DSP)、专用集成电路(ASIC)、现场可编程门阵列(FPGA) 、单片机、ARM(Acorn RISC Machine)或其它可编程逻辑器件、分立门或晶体管逻辑、分立的硬件组件或者这些部件的任何组合而搭建成。
本申请实施例中的激光雷达的测距装置可以是装置,也可以是终端中的部件、集成电路、或芯片。该装置可以是移动电子设备,也可以为非移动电子设备。示例性的,移动电子设备可以为手机、平板电脑、笔记本电脑、掌上电脑、车载电子设备、可穿戴设备、超级移动个人计算机(ultra-mobile personal computer,UMPC)、上网本或者个人数字助理(personal digital assistant,PDA)等,非移动电子设备可以为服务器、网络附属存储器(Network Attached Storage,NAS)、个人计算机(personal computer,PC)、电视机(television,TV)、柜员机或者自助机等,本申请实施例不作具体限定。
本申请实施例中的激光雷达的测距装置可以为具有操作系统的装置。该操作系统可以为安卓(Android)操作系统,可以为ios操作系统,还可以为其他可能的操作系统,本申请实施例不作具体限定。
本申请实施例提供的激光雷达的测距装置能够实现图2实现的各个过程,为避免重复,这里不再赘述。
需要说明的是,上述激光雷达的测距装置可执行本申请实施例所提供的激光雷达的测距方法,具备执行方法相应的功能模块和有益效果。未在激光雷达的测距装置实施例中详尽描述的技术细节,可参见本申请实施例所提供的激光雷达的测距方法。
在本申请实施例中,通过提供一种激光雷达的测距装置,装置包括:测距结果获取单元,用于获取测距目标的第一测距结果;光斑中心估计单元,用于根据第一测距结果,确定第一图像中的测距目标的光斑中心估计值;第一光斑范围确定单元,用于根据第一测距结果和光斑中心估计值,确定第一光斑范围;第二光斑范围确定单元,用于根据第一光斑范围,搜索光斑边界,以确定第二光斑范围;光斑中心计算单元,用于根据第二光斑范围,确定第一图像中的测距目标的光斑中心计算值;测距结果确定单元,用于根据光斑中心计算值,确定第二测距结果,其中,第二测距结果是测距目标的最终测距结果。通过获取测距目标的第一测距结果来确定光斑中心估计值,进而确定第一光斑范围,利用第一光斑范围来确定第二光斑范围,得到光斑中心计算值,以确定第二测距结果,本申请能够通过较小的计算量获得较高的测距精度,从而实现在不降低测距精度的情况下,降低激光雷达的成本。
本申请实施例还提供了一种激光雷达,请参阅图9,图9是本申请实施例提供的一种激光雷达的硬件结构示意图;
如图9所示,该激光雷达90包括通信连接的至少一个处理器901和存储器902(图9中以总线连接、一个处理器为例)。
其中,处理器901用于提供计算和控制能力,以控制激光雷达90执行相应任务,例如,控制激光雷达90执行上述任一方法实施例中的激光雷达的测距方法,包括:获取测距目标的第一测距结果;根据第一测距结果,确定第一图像中的测距目标的光斑中心估计值;根据第一测距结果和光斑中心估计值,确定第一光斑范围;根据第一光斑范围,搜索光斑边界,以确定第二光斑范围;根据第二光斑范围,确定第一图像中的测距目标的光斑中心计算值;根据光斑中心计算值,确定第二测距结果,其中,第二测距结果是测距目标的最终测距结果。
通过获取测距目标的第一测距结果来确定光斑中心估计值,进而确定第一光斑范围,进一步确定第二光斑范围,得到光斑中心计算值,以确定第二测距结果,本申请能够通过较小的计算量获得较高的测距精度,从而实现在不降低测距精度的情况下,降低激光雷达的成本。
处理器901可以是通用处理器,包括中央处理器(CentralProcessingUnit,CPU)、网络处理器(NetworkProcessor,NP)、硬件芯片或者其任意组合;还可以是数字信号处理器(DigitalSignalProcessing,DSP)、专用集成电路(ApplicationSpecificIntegratedCircuit,ASIC)、可编程逻辑器件(programmable logic device,PLD)或其组合。上述PLD可以是复杂可编程逻辑器件(complex programmable logic device,CPLD),现场可编程逻辑门阵列(field-programmable gate array,FPGA),通用阵列逻辑(generic array logic,GAL)或其任意组合。
存储器902作为一种非暂态计算机可读存储介质,可用于存储非暂态软件程序、非暂态性计算机可执行程序以及模块,如本申请实施例中的激光雷达的测距方法对应的程序指令/模块。处理器901通过运行存储在存储器902中的非暂态软件程序、指令以及模块,可以实现下述任一方法实施例中的激光雷达的测距方法。具体地,存储器902可以包括易失性存储器(volatile memory,VM),例如随机存取存储器(random access memory, RAM);存储器902也可以包括非易失性存储器(non-volatile memory,NVM),例如只读存储器(read-only memory, ROM),快闪存储器(flash memory),硬盘(hard disk drive, HDD)或固态硬盘(solid-state drive, SSD)或其他非暂态固态存储器件;存储器902还可以包括上述种类的存储器的组合。
在本申请实施例中,存储器902还可以包括相对于处理器远程设置的存储器,这些远程存储器可以通过网络连接至处理器。上述网络的实例包括但不限于互联网、企业内部网、局域网、移动通信网及其组合。
在本申请实施例中,激光雷达90还可以具有有线或无线网络接口、键盘以及输入输出接口等部件,以便进行输入输出,激光雷达90还可以包括其他用于实现设备功能的部件,在此不做赘述。
请再参阅图10,图10是本申请实施例提供的一种机器人的结构示意图;
如图10所示,该机器人100,包括:激光雷达101以及控制器102,其中,激光雷达101通信连接该控制器102,该控制器102用于向激光雷达101发送测距指令,以使激光雷达101进行测距。可以理解的是,该测距指令可以由外部终端向机器人100发送,由控制器102将该测距指令转发到该激光雷达101。其中,外部终端可以为固定终端或移动终端,例如:电脑、手机、平板等电子设备,在此不进行限定。
需要说明的是,机器人的具体硬件结构等内容,可以参考上述实施例提及的内容,在此不再赘述。
本申请实施例还提供了一种计算机可读存储介质,例如包括程序代码的存储器,上述程序代码可由处理器执行以完成上述实施例中的激光雷达的测距方法。例如,该计算机可读存储介质可以是只读存储器(Read-Only Memory ,ROM)、随机存取存储器(RandomAccess Memory,RAM)、只读光盘(Compact Disc Read-Only Memory,CDROM)、磁带、软盘和光数据存储设备等。
本申请实施例还提供了一种计算机程序产品,该计算机程序产品包括一条或多条程序代码,该程序代码存储在计算机可读存储介质中。电子设备的处理器从计算机可读存储介质读取该程序代码,处理器执行该程序代码,以完成上述实施例中提供的激光雷达的测距方法的方法步骤。
本领域普通技术人员可以理解实现上述实施例的全部或部分步骤可以通过硬件来完成,也可以通过程序来程序代码相关的硬件完成,该程序可以存储于一种计算机可读存储介质中,上述提到的存储介质可以是只读存储器,磁盘或光盘等。
通过以上的实施方式的描述,本领域普通技术人员可以清楚地了解到各实施方式可借助软件加通用硬件平台的方式来实现,当然也可以通过硬件。本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程是可以通过计算机程序来指令相关的硬件来完成,程序可存储于一计算机可读取存储介质中,该程序在执行时,可包括如上述各方法的实施例的流程。其中,存储介质可为磁碟、光盘、只读存储记忆体(Read-Only Memory,ROM)或随机存储记忆体(Random Access Memory, RAM)等。
最后应说明的是:以上实施例仅用以说明本申请的技术方案,而非对其限制;在本申请的思路下,以上实施例或者不同实施例中的技术特征之间也可以进行组合,步骤可以以任意顺序实现,并存在如上述的本申请的不同方面的许多其它变化,为了简明,它们没有在细节中提供;尽管参照前述实施例对本申请进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本申请各实施例技术方案的范围。
Claims (11)
1.一种激光雷达的测距方法,其特征在于,所述方法包括:
获取测距目标的第一测距结果;
根据所述第一测距结果,确定第一图像中的测距目标的光斑中心估计值;
根据所述第一测距结果和所述光斑中心估计值,确定第一光斑范围;
根据所述第一光斑范围,搜索光斑边界,以确定第二光斑范围;
根据所述第二光斑范围,确定所述第一图像中的测距目标的光斑中心计算值;
根据所述光斑中心计算值,确定第二测距结果,其中,所述第二测距结果是所述测距目标的最终测距结果。
2.根据权利要求1所述的方法,其特征在于,所述根据所述第一测距结果,确定第一图像中的测距目标的光斑中心估计值,包括:

其中, 为第一图像中的测距目标的光斑中心估计值,
为第一图像中的测距目标的光斑中心估计值, 为第一参数,
为第一参数, 为第二参数,
为第二参数, 为第一测距结果,
为第一测距结果, 为像元宽度。
为像元宽度。
3.根据权利要求1所述的方法,其特征在于,所述方法还包括:
建立查找表,其中,所述查找表包括测距结果与搜索宽度的对应关系,其中,所述测距结果包括TOF测距值。
4.根据权利要求3所述的方法,其特征在于,所述根据所述第一测距结果和所述光斑中心估计值,确定第一光斑范围,包括:
根据所述查找表,查找所述第一测距结果对应的第一搜索宽度;
根据所述光斑中心估计值和所述第一测距结果对应的第一搜索宽度,确定第一光斑范围。
5.根据权利要求4所述的方法,其特征在于,所述方法还包括:
根据所述第一图像的第一光斑范围内的光斑特征,调整所述第一光斑范围,以得到调整后的第一光斑范围。
6.根据权利要求5所述的方法,其特征在于,所述查找表包括测距结果、搜索宽度与光斑特征调整参数的对应关系,所述根据所述第一图像的第一光斑范围内的光斑特征,调整所述第一光斑范围,以得到调整后的第一光斑范围,包括:
搜索所述第一光斑范围内的光斑特征;
根据所述第一搜索宽度,结合所述第一光斑范围内的光斑特征以及所述第一测距结果对应的光斑特征调整参数,确定第二搜索宽度;
根据所述第二搜索宽度,确定调整后的第一光斑范围。
7.根据权利要求6所述的方法,其特征在于,所述光斑特征包括最大亮度,所述光斑特征调整参数包括最大亮度调整参数,所述根据所述第一搜索宽度,结合所述第一光斑范围内的光斑特征以及所述第一测距结果对应的光斑特征调整参数,确定第二搜索宽度,包括:
第二搜索宽度=第一搜索宽度+最大亮度*最大亮度调整参数。
8.根据权利要求1-7任一项所述的方法,其特征在于,所述根据所述光斑中心计算值,确定第二测距结果,包括:

其中, 为第二测距结果,
为第二测距结果, 为第一参数,
为第一参数, 为第二参数,
为第二参数, 为像元宽度,
为像元宽度, 为光斑中心计算值。
为光斑中心计算值。
9.一种激光雷达的测距装置,其特征在于,所述装置包括:
测距结果获取单元,用于获取测距目标的第一测距结果;
光斑中心估计单元,用于根据所述第一测距结果,确定第一图像中的测距目标的光斑中心估计值;
第一光斑范围确定单元,用于根据所述第一测距结果和所述光斑中心估计值,确定第一光斑范围;
第二光斑范围确定单元,用于根据所述第一光斑范围,搜索光斑边界,以确定第二光斑范围;
光斑中心计算单元,用于根据所述第二光斑范围,确定第一图像中的测距目标的光斑中心计算值;
测距结果确定单元,用于根据所述光斑中心计算值,确定第二测距结果,其中,所述第二测距结果是所述测距目标的最终测距结果。
10.一种激光雷达,其特征在于,包括:
存储器以及一个或多个处理器,所述一个或多个处理器用于执行存储在所述存储器中的一个或多个计算机程序,所述一个或多个处理器在执行所述一个或多个计算机程序时,使得所述激光雷达实现如权利要求1-8任一项所述的方法。
11.一种机器人,其特征在于,包括:
如权利要求10所述的激光雷达。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210274320.0A CN114371483B (zh) | 2022-03-21 | 2022-03-21 | 激光雷达的测距方法、装置、激光雷达及机器人 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210274320.0A CN114371483B (zh) | 2022-03-21 | 2022-03-21 | 激光雷达的测距方法、装置、激光雷达及机器人 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN114371483A true CN114371483A (zh) | 2022-04-19 |
| CN114371483B CN114371483B (zh) | 2022-06-10 |
Family
ID=81145261
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210274320.0A Active CN114371483B (zh) | 2022-03-21 | 2022-03-21 | 激光雷达的测距方法、装置、激光雷达及机器人 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN114371483B (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115372933A (zh) * | 2022-08-31 | 2022-11-22 | 深圳市欢创科技有限公司 | 一种杂光过滤方法、装置及激光雷达 |
| CN115656978A (zh) * | 2022-10-31 | 2023-01-31 | 哈尔滨工业大学 | 目标条纹图像中光斑位置的获得方法和装置 |
Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102401647A (zh) * | 2010-09-07 | 2012-04-04 | 原相科技股份有限公司 | 光学测距系统 |
| CN105652280A (zh) * | 2015-11-26 | 2016-06-08 | 广东雷洋智能科技股份有限公司 | 一种激光雷达三角测距法 |
| CN106092146A (zh) * | 2016-08-30 | 2016-11-09 | 宁波菜鸟智能科技有限公司 | 激光测距校正方法及系统 |
| CN107870323A (zh) * | 2017-11-06 | 2018-04-03 | 深圳市杉川机器人有限公司 | 去抖动方法及装置 |
| CN109964144A (zh) * | 2016-11-17 | 2019-07-02 | 特里纳米克斯股份有限公司 | 用于光学探测至少一个对象的检测器 |
| CN110687545A (zh) * | 2019-09-27 | 2020-01-14 | 电子科技大学中山学院 | 一种高精度激光雷达系统 |
| CN111103593A (zh) * | 2019-12-31 | 2020-05-05 | 深圳市欢创科技有限公司 | 测距模组、机器人、测距方法及非易失性可读存储介质 |
| CN111819468A (zh) * | 2020-03-16 | 2020-10-23 | 深圳市汇顶科技股份有限公司 | 三维图像传感系统以及相关电子装置以及飞时测距方法 |
| US20210165098A1 (en) * | 2019-12-01 | 2021-06-03 | Magik Eye Inc. | Enhancing triangulation-based three-dimensional distance measurements with time of flight information |
| CN113176579A (zh) * | 2021-03-01 | 2021-07-27 | 奥比中光科技集团股份有限公司 | 光斑位置自适应搜索方法、时间飞行测距系统及测距方法 |
| CN113466836A (zh) * | 2021-06-23 | 2021-10-01 | 深圳市欢创科技有限公司 | 一种测距方法、装置及激光雷达 |
| WO2021213788A1 (de) * | 2020-04-21 | 2021-10-28 | Daimler Ag | Verfahren und vorrichtung zum erkennen von blooming in einer lidarmessung |
-
2022
- 2022-03-21 CN CN202210274320.0A patent/CN114371483B/zh active Active
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102401647A (zh) * | 2010-09-07 | 2012-04-04 | 原相科技股份有限公司 | 光学测距系统 |
| CN105652280A (zh) * | 2015-11-26 | 2016-06-08 | 广东雷洋智能科技股份有限公司 | 一种激光雷达三角测距法 |
| CN106092146A (zh) * | 2016-08-30 | 2016-11-09 | 宁波菜鸟智能科技有限公司 | 激光测距校正方法及系统 |
| CN109964144A (zh) * | 2016-11-17 | 2019-07-02 | 特里纳米克斯股份有限公司 | 用于光学探测至少一个对象的检测器 |
| CN107870323A (zh) * | 2017-11-06 | 2018-04-03 | 深圳市杉川机器人有限公司 | 去抖动方法及装置 |
| CN110687545A (zh) * | 2019-09-27 | 2020-01-14 | 电子科技大学中山学院 | 一种高精度激光雷达系统 |
| US20210165098A1 (en) * | 2019-12-01 | 2021-06-03 | Magik Eye Inc. | Enhancing triangulation-based three-dimensional distance measurements with time of flight information |
| CN111103593A (zh) * | 2019-12-31 | 2020-05-05 | 深圳市欢创科技有限公司 | 测距模组、机器人、测距方法及非易失性可读存储介质 |
| CN111819468A (zh) * | 2020-03-16 | 2020-10-23 | 深圳市汇顶科技股份有限公司 | 三维图像传感系统以及相关电子装置以及飞时测距方法 |
| WO2021213788A1 (de) * | 2020-04-21 | 2021-10-28 | Daimler Ag | Verfahren und vorrichtung zum erkennen von blooming in einer lidarmessung |
| CN113176579A (zh) * | 2021-03-01 | 2021-07-27 | 奥比中光科技集团股份有限公司 | 光斑位置自适应搜索方法、时间飞行测距系统及测距方法 |
| CN113466836A (zh) * | 2021-06-23 | 2021-10-01 | 深圳市欢创科技有限公司 | 一种测距方法、装置及激光雷达 |
Non-Patent Citations (5)
| Title |
|---|
| MANESH V. MOHAN等: "A Method for Minimum Range Extension with Improved Accuracy in Triangulation Laser Range Finder", 《PROCEEDINGS OF THE 1ST INTERNATIONAL CONFERENCE ON WIRELESS TECHNILOGIES FOR HUMANITARIAN RELIEF》 * |
| ORESTE SGROTT等: "A 134-Pixel CMOS Sensor for Combined Time-of-Flight and Optical Triangulation 3-D Imaging", 《IEEE JOURNAL OF SOLID-STATE CIRCUITS》 * |
| YASSINE SELAMI等: "A Scheme for Enhancing Precision in 3-Dimensional Positioning for Non-Contact Measurement Systems Based on Laser Triangulation", 《SENSORS》 * |
| 侯良策: "基于激光三角法的室内测距系统研究", 《中国优秀博硕士学位论文全文数据库(硕士)信息科技辑(月刊)》 * |
| 张正琦等: "激光三角测距中的光斑形状修正", 《光学精密工程》 * |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115372933A (zh) * | 2022-08-31 | 2022-11-22 | 深圳市欢创科技有限公司 | 一种杂光过滤方法、装置及激光雷达 |
| CN115656978A (zh) * | 2022-10-31 | 2023-01-31 | 哈尔滨工业大学 | 目标条纹图像中光斑位置的获得方法和装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN114371483B (zh) | 2022-06-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108762245B (zh) | 数据融合方法以及相关设备 | |
| CN114371483B (zh) | 激光雷达的测距方法、装置、激光雷达及机器人 | |
| US11045953B2 (en) | Relocalization method and robot using the same | |
| JP2018526641A (ja) | レーザ深度マップサンプリングのためのシステム及び方法 | |
| CN106569225B (zh) | 一种基于测距传感器的无人车实时避障方法 | |
| CN114355321B (zh) | 激光雷达的标定方法、装置、系统、激光雷达及机器人 | |
| CN112051575B (zh) | 一种毫米波雷达与激光雷达的调整方法及相关装置 | |
| CN111308415B (zh) | 一种基于时间延迟的在线估计位姿的方法和设备 | |
| CN115656984A (zh) | Tof点云的处理方法、点云优化方法、激光雷达及机器人 | |
| WO2022179207A1 (zh) | 视窗遮挡检测方法及装置 | |
| CN117289300A (zh) | 点云矫正方法、激光雷达及机器人 | |
| EP4260092A1 (en) | Method, apparatus and radar system for tracking objects | |
| JP2023503750A (ja) | ロボットの位置決め方法及び装置、機器、記憶媒体 | |
| CN117169848A (zh) | 过滤玻璃噪点的方法、激光雷达及机器人 | |
| CN115032618B (zh) | 应用于激光雷达的盲区修复方法、装置及激光雷达 | |
| WO2022160879A1 (zh) | 一种转换参数的确定方法和装置 | |
| CN108474848A (zh) | 用于移动平台操作的系统和方法 | |
| CN112489131B (zh) | 基于路面检测构建代价地图的方法、装置、介质和机器人 | |
| Lu et al. | A low-cost visual radar-based odometry framework with mmwave radar and monocular camera | |
| KR102407690B1 (ko) | 평면 특징을 이용한 3차원 라이다의 캘리브레이션 방법 | |
| WO2022037370A1 (zh) | 一种运动估计方法及装置 | |
| CN114815809A (zh) | 移动机器人的避障方法、系统、终端设备及存储介质 | |
| Li et al. | Environment mapping and vehicle localization with a high-resolution radar prototype | |
| Wang et al. | Infradar-Localization: single-chip infrared-and radar-based Monte Carlo localization | |
| KR20210146728A (ko) | 라이다(Lidar)와 스테레오-카메라(Stereo-Camera) 간의 좌표계 정합 시스템 및 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CP03 | Change of name, title or address |
Address after: 518000, Floor 1801, Block C, Minzhi Stock Commercial Center, North Station Community, Minzhi Street, Longhua District, Shenzhen City, Guangdong Province Patentee after: Shenzhen Huanchuang Technology Co.,Ltd. Address before: 518000 2407-2409, building 4, phase II, Tian'an Yungu Industrial Park, Gangtou community, Bantian street, Longgang District, Shenzhen, Guangdong Patentee before: SHENZHEN CAMSENSE TECHNOLOGIES Co.,Ltd. |
|
| CP03 | Change of name, title or address |