CN114250737A - 压雪车和控制压雪车的方法 - Google Patents
压雪车和控制压雪车的方法 Download PDFInfo
- Publication number
- CN114250737A CN114250737A CN202111122332.3A CN202111122332A CN114250737A CN 114250737 A CN114250737 A CN 114250737A CN 202111122332 A CN202111122332 A CN 202111122332A CN 114250737 A CN114250737 A CN 114250737A
- Authority
- CN
- China
- Prior art keywords
- snow
- values
- parameters
- mode
- plow assembly
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Classifications
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01H—STREET CLEANING; CLEANING OF PERMANENT WAYS; CLEANING BEACHES; DISPERSING OR PREVENTING FOG IN GENERAL CLEANING STREET OR RAILWAY FURNITURE OR TUNNEL WALLS
- E01H4/00—Working on surfaces of snow or ice in order to make them suitable for traffic or sporting purposes, e.g. by compacting snow
- E01H4/02—Working on surfaces of snow or ice in order to make them suitable for traffic or sporting purposes, e.g. by compacting snow for sporting purposes, e.g. preparation of ski trails; Construction of artificial surfacings for snow or ice sports ; Trails specially adapted for on-the-snow vehicles, e.g. devices adapted for ski-trails
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D21/00—Measuring or testing not otherwise provided for
- G01D21/02—Measuring two or more variables by means not covered by a single other subclass
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N33/00—Investigating or analysing materials by specific methods not covered by groups G01N1/00 - G01N31/00
- G01N33/18—Water
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0219—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory ensuring the processing of the whole working surface
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N33/00—Investigating or analysing materials by specific methods not covered by groups G01N1/00 - G01N31/00
- G01N33/18—Water
- G01N33/1873—Ice or snow
Landscapes
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Structural Engineering (AREA)
- Physics & Mathematics (AREA)
- Civil Engineering (AREA)
- Architecture (AREA)
- Life Sciences & Earth Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Health & Medical Sciences (AREA)
- Medicinal Chemistry (AREA)
- Biochemistry (AREA)
- Immunology (AREA)
- Pathology (AREA)
- General Health & Medical Sciences (AREA)
- Food Science & Technology (AREA)
- Analytical Chemistry (AREA)
- Aviation & Aerospace Engineering (AREA)
- Automation & Control Theory (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Lifting Devices For Agricultural Implements (AREA)
- Cleaning Of Streets, Tracks, Or Beaches (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
一种压雪车包括:沿着纵向轴线(70)延伸的框架(2);通过连接装置(21)连接至框架(2)的雪犁组件(9),所述雪犁组件(9)优选包括雪犁(9a)和修整器(9b);耦合至雪犁组件(9)且被构造为控制雪犁组件的至少两个参数的至少一个控制装置(17),控制装置(17)包括被构造为存储与至少两个参数(A,B)关联的至少两个数值组(N,M)、优选四个数值组(N,M,P,Q)的存储器,其中每个数值组(N,M)都包括用于至少两个参数(A,B)中的每一个的至少一个数值,控制装置(17)被构造为接收至少两个数值组(N,M)中的数值组的选择结果并且根据所选择的数值组(N;M)的数值来控制雪犁组件(9)的至少两个参数。
Description
相关申请的交叉引用
本专利申请要求2020年9月24日提交的意大利专利申请第102020000022564号的优先权,其全部公开内容通过引用并入本文。
技术领域
本发明涉及一种压雪车以及一种控制压雪车的方法。
背景技术
众所周知,准备滑雪道具有不断增加的维护要求,这是出于安全原因,并且因为现代的工具能够更好地在不具有明显的粗糙度并且尽可能均匀的规则表面上使用。通过压雪车来处理积雪层,该压雪车配备有用于此目的的特殊工具。特别地,压雪车主要包括前部的铲斗或铲刀以及后部的雪犁和修整器。具有雪犁和修整器的后部工具能够实现积雪层表面的所需的精修。
然而,准备滑道的质量当前极大地依赖于压雪车操作者的技术和经验,该操作者几乎完全对工作工具进行控制。因此,明显受到不容忽视的主观成分影响的可获得的结果基本上无法重复并且不能容易地进行优化。这一方面产生了超过客观环境因素所允许的水平的不规则的状况,并且另一方面由于不能最优地执行处理步骤而导致时间和资源的极大浪费。
相反地,需要更均匀的结果,尤其是用于补偿经验不足的操作者的更有限的能力。
发明内容
本发明的目的是提供一种压雪车和一种控制压雪车的方法,以允许克服或至少缓解上述的限制。
因此,根据本发明,提供了一种压雪车,其包括:沿着纵向轴线延伸的框架;通过连接装置连接至框架的雪犁组件,该雪犁组件优选至少包括雪犁和修整器;至少一个控制装置,其耦合至雪犁组件并且被构造为控制雪犁组件的从包括雪犁组件的以下参数的组合中选择的至少两个参数、优选五个参数:轴的旋转速度和/或旋转方向;雪犁组件、优选雪犁的深度和/或切割角度;雪犁组件沿着竖直轴线的位置;用于调节雪犁组件沿着竖直轴线的位置的模式,优选包括:雪犁组件处于固定位置的模式、雪犁组件除了其自身重量之外在积雪层上施加特定压力或者减去其自身重量和所施加的压力值的模式以及雪犁组件处于浮动位置、特别是处于其跟随积雪层的浮动位置的模式;翼片打开或关闭的位置;雪犁的工作腔室的容积;雪犁相对于水平面的位置;调节雪犁相对于水平面的位置的模式,优选在雪犁组件处于固定位置的模式与雪犁组件处于浮动位置、特别是处于其跟随压雪车的运动的浮动位置的模式之间调节;以及修整器的位置。
控制装置包括被构造为存储与至少两个参数关联的至少两个数值组、优选四个数值组的存储器,其中每个数值组都包括用于至少两个参数中的每一个的至少一个数值。
控制装置被构造为接收至少两个数值组中的数值组的选择结果并且根据所选择的数值组的数值来控制雪犁组件的至少两个参数。
借助于本发明,所述压雪车的使用对于操作者来说更简单并且处理结果即使对于经验不足的操作者来说也变得更好。
另外,控制装置可被构造为使得其能够基于传感器对其他参数的检测或者基于压雪车在滑雪场的位置或者基于远程接收的指令或者基于预设的设置而自动地选择至少两个数值组中的一个。
因此,可以在没有操作者介入的情况下自动地选择数值组,因此进一步简化了他/她的工作。这确保了较少地依赖压雪车操作者的经验的更好的积雪层处理结果。
根据本发明的另一个方面,还提供了一种对压雪车进行控制的控制方法。该压雪车包括:沿着纵向轴线延伸的框架;通过连接装置连接至框架的雪犁组件,该雪犁组件优选包括雪犁和修整器,该方法包括以下步骤:控制雪犁组件的从包括雪犁组件的以下参数的组合中选择的至少两个参数、优选五个参数:轴的旋转速度和/或旋转方向;雪犁组件、优选雪犁的深度和/或切割角度;雪犁组件沿着竖直轴线的位置;用于调节雪犁组件沿着竖直轴线的位置的模式,优选包括:雪犁组件处于固定位置的模式、雪犁组件除了其自身重量之外在积雪层上施加特定压力或者减去其自身重量和所施加的压力值的模式以及雪犁组件处于浮动位置、特别是处于其跟随积雪层的浮动位置的模式;翼片打开或关闭的位置;雪犁的工作腔室的容积;雪犁相对于水平面的位置;调节雪犁相对于水平面的位置的模式,优选在雪犁组件处于固定位置的模式与雪犁组件处于浮动位置、特别是处于其跟随压雪车的运动的浮动位置的模式之间调节;以及修整器的位置;
存储与至少两个参数关联的至少两个数值组、优选四个数值组,其中每个数值组都包括用于至少两个参数中的每一个的至少一个数值;
接收至少两个数值组中的数值组的选择结果;以及
根据所选择的数值组的数值来控制雪犁组件的参数。
附图说明
通过参考附图的本发明的非限制性实施方式的以下说明,本发明的其他的特征和优点将变得显而易见,其中:
图1是根据本发明的实施方式的压雪车的侧视图;
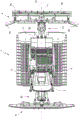
图2是图1的压雪车的俯视平面图;
图3是图1的压雪车简化的框图;
图4示出了可通过图1的压雪车的部件检测的坐标;
图5是示出了通过图1的压雪车的控制装置控制的参数的数值组的图表;并且
图6示出了根据本发明的实施方式制造的压雪车的显示屏。
具体实施方式
参考图1-3,根据本发明的实施方式的压雪车整体上通过附图标记1表示并且包括沿着纵向轴线70延伸的框架2、驾驶室3、驱动单元5(例如内燃机)。驾驶室3和驱动单元5被容纳在框架2上。压雪车1还设置有一对履带6,以及用户装置,包括通过框架2支撑在前部的铲斗或铲刀8以及具有雪犁9a并优选具有修整器9b的、通过框架2支撑在后部的雪犁组件9。还可以具有此处没有示出的绞盘组件。
驱动单元5提供压雪车1的操作所需的动力,并且特别是向履带6以及用户装置8和9提供动力。
传动装置12可以是液压式或电子式或者它们的组合。
驱动单元5可以是电动马达,其具有充电电池来代替内燃机。替代地,驱动单元5可以是混动发动机,其包括串联或并联连接的内燃机和电动马达。在另一个实施方式中,驱动单元5可以是氢动力燃料电池发动机。
雪犁9a尤其是包括有齿的旋转轴9d和设置在旋转轴9d上方的护罩9c。护罩9c与旋转轴9d之间的区域被指定为工作腔室并且被构造为具有可变的容积。特别地,雪犁9a包括用于改变旋转轴9d与护罩9c之间的距离或者用于改变修整器9b的位置的装置,从而可以调节工作腔室的容积。该装置可以通过改变旋转轴9d的位置而在其上起作用或者可以通过调节护罩9c的位置而在其上起作用或者可以通过改变修整器9b的位置而在其上起作用。通过改变工作腔室,能够对所处理的积雪层进行不同的犁耕。
雪犁组件9包括相对于护罩9c横向设置的两个侧翼片9e。
在附图没有示出的一个实施方式中,雪犁组件9包括通过优选的万向接头彼此连接的两个雪犁9a。在这个实施方式中,两个雪犁9a各自包括有齿的旋转轴9d和设置在旋转轴9d上方的护罩9c。
用户界面被安装在驾驶室3中,该界面允许操作者控制压雪车1的运动以及用户装置的操作。
特别地,压雪车1包括用户界面,该用户界面又包括压雪车1的运动的行进控制器10,其用于控制压雪车1的行进方向和速度,特别地,行进控制器10控制履带6的运动,从而限定压雪车1的运动方向和速度。
此外,压雪车1包括用户界面,该用户界面又包括用于操作用户装置的启动命令器11,该启动命令器11特别是控制用户装置。在一个实施方式中,启动命令器11包括具有控制杆、多个按钮的操纵杆。在一个实施方式中,所述操纵杆包括至少一个滑块和至少一个迷你控制杆。
特别地,启动命令器11控制与雪犁组件9关联的一个或多个以下参数:轴9d的旋转速度和/或旋转方向;雪犁组件9、优选雪犁9a的深度和/或切割角度;雪犁组件9a沿着竖直轴线71的位置;用于调节雪犁组件9沿着竖直轴线71的位置的模式,优选包括:雪犁组件9处于固定位置的模式、雪犁组件9除了其自身重量之外在积雪层72上施加特定压力或者减去其自身重量和所施加的压力值的模式以及雪犁组件9处于浮动位置、特别是处于其跟随积雪层72的浮动位置的模式;翼片9e打开或关闭的位置;雪犁9a的工作腔室的容积;雪犁9a相对于水平面73的位置;调节雪犁9a相对于水平面73的位置的模式,优选在雪犁组件9处于固定位置的模式与雪犁组件处于浮动位置、特别是处于其跟随压雪车1的运动的浮动位置的模式之间调节;以及修整器9b的位置。
此外,在雪犁组件9包括通过优选的万向接头彼此连接的两个雪犁9a的上述实施方式中,除了上述内容之外,启动命令器11还可以在上述参数组合中的一个或多个参数中控制调节两个雪犁9a在雪犁组件9中的相对位置的模式,特别是包括:两个雪犁9a的相对位置是自由的并因此使得两个雪犁9a可彼此独立地自由移动的模式、两个雪犁9a的位置被固定为使得两个雪犁9a在相对于积雪层72倾斜的平面中形成180°的指定角(特别地,该角朝向积雪层72)的模式、两个雪犁9a的位置被固定为使得两个雪犁9a在相对于积雪层72倾斜的平面中形成小于180°的指定角(特别地,该角朝向积雪层72)的模式以及两个雪犁9a的位置被固定为使得两个雪犁9a在相对于积雪层72倾斜的平面中形成大于180°的指定角(特别地,该角朝向积雪层72)的模式。
此外,启动命令器11控制铲刀8相对于三个笛卡尔坐标轴的位置。
在一个非限制性实施方式中,压雪车1包括用户界面,该用户界面又包括显示屏4,其被构造为显示与压雪车1和用户装置(特别是铲刀8和雪犁组件9)的操作参数有关的信息。
压雪车1设置有卫星导航装置13以及控制系统15。
卫星导航装置13例如是GNSS(“Global Navigation Satellite System”,全球导航卫星系统),其被构造为在厘米级精度下确定其三维位置和取向并且因此确定压雪车1的三维位置和取向。实际上,除了行进方向之外,卫星导航装置13能够确定经度LG、纬度LT并且优选确定距地面的高度H。距地面的高度H对应于积雪层72在卫星导航装置13和压雪车1的坐标处的厚度。特别地,距地面的高度H可通过卫星导航装置13检测到的高度与具有对应的经度LG和纬度LT的参考地图所限定的地面高度之间的差值来确定。该参考地图可以在没有积雪的情况下使用卫星导航装置13来制作并且存储在卫星导航装置13或控制系统15中。在第一种情况下,距地面的高度H直接通过卫星导航装置13来提供;在第二种情况下,卫星导航装置13可以提供相对于参考高度(例如海平面)的高度并且距地面的高度H通过控制系统15使用参考地图来确定。
控制系统15检测压雪车1的操作参数,例如但非排他地为:驱动单元5供应的功率;每个用户装置、特别是铲刀8和雪犁9吸收的功率;铲刀8和雪犁组件9的位置;以及压雪车1的行进速度。
此外,控制系统15可以检测从雪犁组件9的以下操作参数中选择的压雪车1的一个或多个操作参数:轴9d的旋转速度和/或旋转方向;雪犁组件9、优选雪犁9a的深度和/或切割角度;雪犁组件9a沿着竖直轴线71的位置;用于调节雪犁组件9沿着竖直轴线71的位置的模式,优选包括雪犁组件9处于固定位置的模式、雪犁组件9除了其自身重量之外在积雪层72上施加特定压力或者从其自身重量减去所施加的压力值的模式以及雪犁组件9处于浮动位置、特别是处于其跟随积雪层72的浮动位置的模式;翼片9e打开或关闭的位置;雪犁9a的工作腔室的容积;雪犁9a相对于水平面73的位置;调节雪犁9a相对于水平面73的位置的模式,优选在雪犁组件9处于固定位置的模式与雪犁组件处于浮动位置、特别是处于其跟随压雪车1的运动的浮动位置的模式之间调节;以及修整器9b的位置。
此外,在雪犁组件9包括通过优选的万向接头彼此连接的两个雪犁9a的上述实施方式中,除了上述内容之外,控制系统15还可以在上述参数组合中的一个或多个操作参数中检测两个雪犁9a在雪犁组件9中的相对位置的调节模式,特别是包括:两个雪犁9a的相对位置是自由的并因此使得两个雪犁9a可彼此独立地自由移动的模式、两个雪犁9a的位置被固定为使得两个雪犁9a在相对于积雪层72倾斜的平面中形成180°的指定角(特别地,该角朝向积雪层72)的模式、两个雪犁9a的位置被固定为使得两个雪犁9a在相对于积雪层72倾斜的平面中形成小于180°的角(特别地,该角朝向积雪层72)的模式以及两个雪犁9a的位置被固定为使得两个雪犁9a在相对于积雪层72倾斜的平面中形成大于180°的角(特别地,该角朝向积雪层72)的模式。
控制系统15配备有无线连接能力,例如,直接借助于本地通信网络或借助于移动数据网络和因特网连接,以用于连接至此处没有示出的滑雪场的资源管理系统。
特别地,压雪车1包括耦合至控制系统15的无线电波通信单元18,其用于将远程接收到的信息发送给控制系统15或将来自控制系统15的信息发送给外部。
铲刀8通过前部连接装置20连接至框架2,而雪犁组件9通过后部连接装置21连接至框架2。
被构造为控制前部连接装置20的启动命令器11被容纳在驾驶室3中,并且允许控制铲刀8的位置。
另外,启动命令器11被构造为控制后部连接装置21并且被容纳在驾驶室3中。
参考图1和2,后部连接装置21还包括致动器组件50(图2),其用于控制雪犁组件9的一个或多个以下参数:轴9d的旋转速度和/或旋转方向;雪犁组件9、优选雪犁9a的深度和/或切割角度;雪犁组件9a沿着竖直轴线71的位置;用于调节雪犁组件9沿着竖直轴线71的位置的模式,优选包括雪犁组件9处于固定位置的模式、雪犁组件9除了其自身重量之外在积雪层72上施加特定压力或者减去其自身重量和所施加的压力值的模式以及雪犁组件9处于浮动位置、特别是处于其跟随积雪层72的浮动位置的模式;翼片9e打开或关闭的位置;雪犁9a的工作腔室的容积;雪犁9a相对于水平面73的位置;调节雪犁9a相对于水平面73的位置的模式,优选在雪犁组件9处于固定位置的模式与雪犁组件处于浮动位置、特别是处于其跟随压雪车1的运动的浮动位置的模式之间调节;以及修整器9b的位置。
此外,在雪犁组件9包括通过优选的万向接头彼此连接的两个雪犁9a的上述实施方式中,除了上述内容之外,致动器组件50(图2)还可以在上述参数组合中的一个或多个以下参数中控制调节两个雪犁9a在雪犁组件9中的相对位置的模式,优选包括:两个雪犁9a的相对位置是自由的并因此使得两个雪犁9a可彼此独立地自由移动的模式、两个雪犁9a的位置被固定为使得两个雪犁9a在相对于积雪层72倾斜的平面中形成180°的指定角(特别地,该角朝向积雪层72)的模式、两个雪犁9a的位置被固定为使得两个雪犁9a在相对于积雪层72倾斜的平面中形成小于180°的角(特别地,该角朝向积雪层72)的模式以及两个雪犁9a的位置被固定为使得两个雪犁9a在相对于积雪层72倾斜的平面中形成大于180°的角(特别地,该角朝向积雪层72)的模式。
启动命令器11被构造为控制雪犁组件9的后部连接装置21和致动器组件50。该启动命令器11被容纳在驾驶室3中并且允许调节上述的一个或多个操作参数。
在一个实施方式中,用于控制铲刀8、特别是前部连接装置20的启动命令器11和用于控制雪犁组件9、特别是雪犁组件9的致动器组件50和后部连接装置21的启动命令器11总体上通过单一的手动控制装置来限定,其是具有控制杆以及位于控制杆上的一系列的迷你控制杆和按钮的操纵杆。
控制系统15包括控制装置17,其耦合至雪犁组件9并被构造为控制雪犁组件9的从包括雪犁组件9的以下参数的组合中选择的至少两个参数A和B、优选五个参数A、B、C、D和E:轴9d的旋转速度和/或旋转方向;雪犁组件9、优选雪犁9a的深度和/或切割角度;雪犁组件9a沿着竖直轴线71的位置;用于调节雪犁组件9沿着竖直轴线71的位置的模式,优选包括雪犁组件9处于固定位置的模式、雪犁组件9除了其自身重量之外在积雪层72上施加特定压力或者减去其自身重量和所施加的压力值的模式以及雪犁组件9处于浮动位置、特别是处于其跟随积雪层72的浮动位置的模式;翼片9e打开或关闭的位置;雪犁9a的工作腔室的容积;雪犁9a相对于水平面73的位置;调节雪犁9a相对于水平面73的位置的模式,优选在雪犁组件9处于固定位置的模式与雪犁组件处于浮动位置、特别是处于其跟随压雪车1的运动的浮动位置的模式之间调节;以及修整器9b的位置。
此外,在雪犁组件9包括通过优选的万向接头彼此连接的两个雪犁9a的上述实施方式中,除了上述内容之外,耦合至雪犁组件9的控制装置17可以控制从上述参数的组合中选择的雪犁组件9的至少两个参数A和B、特别是至少五个参数A、B、C、D和E,其另外还包括调节两个雪犁9a在雪犁组件9中的相对位置的模式,优选包括:两个雪犁的相对位置是自由的并因此使得两个雪犁可彼此独立地自由移动的模式;两个雪犁9a的位置被固定为使得两个雪犁9a在相对于积雪层72倾斜的平面中形成180°的指定角(特别地,该角朝向积雪层72)的模式;两个雪犁的位置被固定为使得两个雪犁9a在相对于积雪层72倾斜的平面中形成小于180°的角(特别地,该角朝向积雪层72)的模式;以及两个雪犁9a的位置被固定为使得两个雪犁9a在相对于积雪层72倾斜的平面中形成大于180°的角(特别地,该角朝向积雪层72)的模式。
另外,控制装置17包括存储器19,其被构造为存储与至少两个参数A和B关联的至少两个数值组N和M、优选四个数值组N、M、P、Q,其中每个数值组都包括用于至少两个参数A和B中的每一个的至少一个数值。
在一个优选实施方式中,数值组N、M各自包括用于至少两个参数A和B中的每一个的第一数值N’、M’和第二数值N”、M”。第一数值N’、M’与压雪车1的向上运动关联并且第二数值N”、M”与压雪车1的向下运动关联。
控制装置17被构造为接收至少两个数值组N、M、优选四个数值组N、M、P、Q中的数值组的选择结果并且根据所选择的数值组的数值NA和NB或MA和MB来控制雪犁组件的至少两个参数A和B。
此外,控制装置15被构造为接收与压雪车1的向上运动或压雪车1的向下运动有关的信息,并且根据所接收到的与压雪车的向上或向下运动有关的信息通过使用用于至少两个参数的每个数值组的第一数值N’、M’或第二数值N”、M”来控制至少两个参数。
更详细地,可以通过多种方式在数值组N和M或N、M、P和Q中以及在第一数值N’(或M’、P’和Q’)和第二数值N”(或M”、P”和Q”)中进行选择。
在一个实施方式中,通过用户界面在数值组中进行选择,特别地,用户界面包括用于接收来自操作者的选择结果的选择命令器39。选择命令器39可以是按键或一系列按键,或者可以是在其上显示可选数值的不同组合的触摸屏的触摸感应装置。换句话说,在这个实施方式中,操作者在两个数值组N和M(或者四个数值组N、M、P和Q)中手动选择他/她希望通过压雪车1的选择命令器39使用的数值组。
优选地,两个数值组N和M(或者四个数值组N、M、P和Q)中的每一个都与彼此不同的相应的积雪情况关联,例如新雪、春雪、密实雪或可定制的轮廓。因此,操作者可以在用户界面上、特别是在屏幕上看到与这些不同的积雪情况关联的数值组并且通过按键或直接在屏幕上(在触摸屏的情况下)选择当前的积雪情况并因此选择要使用的参数值组合。
另外,操作者可通过用户界面将与压雪车1的向下或向上运动有关的信息发送给控制装置17,并因此选择是使用参数A、B(或A、B、C、D、E)的所选择的数值组的第一数值还是参数A、B(或A、B、C、D、E)的所选择的数值组的第二数值。
在一个替代实施方式中,控制装置17被构造为控制从上述参数组合中选择的雪犁组件9的两个以上的任何数量的参数A、B、C……。
在一个替代实施方式中,用户可以在任何时间通过用户界面选择要以自动模式控制的参数A、B、C……的数量和类型。
在一个替代实施方式中,控制装置17的存储器19被构造为存储与两个以上的任何数量的参数关联的两个以上的任何数量的数值组,其中每个数值组都包括用于每个参数的至少一个数值、优选两个数值。
如上所述,可以通过用户界面并且优选通过选择命令器39来手动进行数值组N、M、P、Q以及数值组N、M、P、Q中的第一数值X’或第二数值X”的选择,或者可以如下文所述那样自动进行,或者手动和自动组合地进行。
在一个优选实施方式中,压雪车1包括检测单元40,其用于检测与控制装置17通信地连接的压雪车1的向上或向下运动并且向控制装置17发送与压雪车1的向上或向下运动有关的信息,并且其中控制装置17基于从检测装置40接收到的与压雪车1的向上或向下运动有关的信息通过选择用于至少两个参数A、B的每个数值组N、M、P、Q的第一数值X’或第二数值X”来控制至少两个参数。
在一个优选实施方式中,检测装置40包括倾斜仪和/或卫星追踪装置13。
在一个优选实施方式中,压雪车1包括用于检测积雪情况的检测装置41,其与控制装置17通信地耦合,以发送与积雪情况有关的信息,使得控制装置17基于检测到的积雪情况来选择两个数值组中的一个。因此,在这种情况下,自动地进行积雪情况的选择并且不需要操作者介入。
在一个优选实施方式中,用于检测积雪情况的检测装置41包括从以下装置的组合中选择的至少一个装置:积雪温度传感器;环境温度传感器;积雪含水率传感器;环境湿度传感器;积雪密度传感器;环境光亮度传感器;拍摄积雪表面的摄像机;拍摄积雪表面的热成像摄像机。
在一个优选实施方式中,压雪车1包括射频通信单元18,其被构造为接收与天气情况和/或当前日期关联的数据。通信单元18通信地耦合至控制装置17,以发送与天气情况和/或当前日期有关的信息。控制装置17接收与天气情况和/或当前日期有关的信息并且基于接收到的天气情况和/或当前日期来选择两个数值组N或M中的一个(或四个数值组N、M、P或Q中的一个)。
在一个优选实施方式中,例如,控制装置17被构造为通过通信单元18从远程接收与积雪情况有关的至少一个数据,滑雪场的操作者可以从远程发送与积雪情况和/或在两个数值组N和M或者四个数值组N、M、P和Q中选择使用哪个数值组有关的数据。在这种情况下,控制装置17被构造为基于从远程接收到的数据来选择两个数值组N、M(或四个数值组N、M、P和Q)中的一个。
在一个优选实施方式中,控制装置17包括用于计算日期的计数单元42,并且控制装置17基于日期计数单元42所提供的日期来选择数值组N、M中的一个。
在一个优选实施方式中,用户界面耦合至控制装置17并且被构造为接收与积雪情况有关的选择结果。
特别地,图6示出了一个优选实施方式的示例性显示屏4,在其上显示可选择的积雪情况100。特别地,在图6所示非限制性例子中,显示以下情况:新雪、春雪、密实雪或可定制的轮廓。
如上所述,每种积雪情况100都与相应的数值组N、M、P、Q相关联。
通过显示屏4,操作者选择他/她认为最合适的积雪情况并因此选择在数值组中使用哪个数值组。
此外,图6描绘的显示屏4示出了所选的数值组的数值以及可通过自动方式控制的参数A、B、C、D、E。
此外,图6中的显示屏4还示出了在压雪车1向上移动时和向下移动时的参数A、B、C、D、E的两个不同的数值。在这种情况下,显示屏4表示是否启动了检测压雪车1的向上或向下运动的自动模式或者是否已经通过操作者选择了向上或向下运动模式。
此外,显示屏被构造为表示与当前使用的参数的数值关联的最优速度值101和/或与当前使用的参数的数值关联的最优悬挂设定值102。优选地,显示屏4还被构造为在同一个屏幕截图中显示压雪车1的当前前进速度103。
以这种方式,操作者可通过启动行进控制器10来调节压雪车1的速度从而在最优速度下移动和/或将悬挂参数设定为最优值。
在一个优选实施方式中,显示屏4是触摸屏,即,触摸感应屏,因此操作者可通过触摸显示屏4而在显示屏4上直接选择一个或多个以下选项:积雪情况;检测向上或向下运动的自动模式;检测向上或向下运动的手动模式;选择是否使用向上或向下运动值;以及改变每个数值组的数值。在这个实施方式中,选择命令器39优选由显示屏4的触摸屏来限定。
在所有的实施方式中,控制装置17接收与积雪情况有关的信息并且基于接收到的积雪情况的选择结果来选择数值组N、M(N、M、P、Q)中的一个。
此外,在一个优选实施方式中,多个数值组包括与人造雪关联的额外的数值组。因此,将有三个或五个或者等于或大于三的数量的数值组。在这个实施方式中,可通过操作者手动选择或者在一个优选实施方式中以自动或半自动的方式选择包括适于处理人造雪的参数的数值组。在一个实施方式中,压雪车1耦合至用于产生人造雪的装置或者耦合至滑雪场管理系统,该系统又耦合至用于产生人造雪的装置。在这个优选实施方式中,当选择了自动模式时,控制装置17被构造为在其通过人造雪产生装置远程地或通过所耦合的滑雪场接收信息时使用与人造雪关联的第三(或第五)数值组。
另外,数值组中的每个数值都可通过操作者借助于用户界面(例如选择命令器或启动命令器11)来改变,但是仅在压雪车1静止的情况下。为此目的,控制装置17被构造为通过操作者接收参数的每个数值组中的数值的修改并且改变参数的数值组中的每个数值。此外,控制系统15使控制装置17能够仅在检测到压雪车1静止并且已将压雪车1置于锁定履带和用户装置的模式中时改变参数。
此外,启动命令器11总是在压雪车1操作期间启动和操作,因此,在操作期间,操作者可以操作参数从而改变当前在自动模式中设定的参数。在这种情况下,已经改变了参数的压雪车1将不再使用自动调节,而是将遵循操作者设定的手动调节,直到压雪车1关闭为止或者直到操作者通过用户界面输入也用于该参数的自动模式为止。
在一个优选实施方式中,在操作者通过用户界面手动设定要使用的数值组中的数值的手动模式中,控制装置17在其操作期间存储操作者设定的数值组中的数值并且将它们与检测到的其他参数(例如天气、积雪温度、环境温度、积雪密度、积雪含水量、亮度、斜度、压雪车1在滑雪场中的位置)进行关联,并且限定操作者所选择的数值组的数值与检测到的参数之间的耦合。在一个优选实施方式中,控制装置17被构造为使用与已经预先进行耦合和存储的参数耦合的数值组中的数值在自动模式下操作。
换句话说,用户界面4被构造为允许操作者设定至少一个参数的至少两个数值组中的至少一个数值中的每一个。此外,控制装置17被构造为在一个操作模式中记录操作者通过用户界面输入的至少一个数值并且将其与检测到的一个或多个以下参数进行关联:压雪车的位置、空气和/或积雪的温度和/或湿度、接收到的天气数据。控制装置17被构造为在另一个操作模式中基于第一操作模式中所记录的数据以及检测到的一个或多个以下参数来对在第一操作模式中设定的每个数值组的至少一个数值进行设定:压雪车的位置、空气和/或积雪的温度和/或湿度、接收到的天气数据。
在一个实施方式中,控制装置17存储操作者在手动模式下使用的参数并且将它们发送给滑雪场的远程中央单元,该远程中央单元分析数据并且限定数值组的参数值。在半自动模式中,操作者可以自主选择数值组N、M、P、Q中的一个,并且控制装置17将它们耦合至检测到的数据、温度、湿度等,并且将它们用于完全自动模式。
在一个优选实施方式中,本发明包括具有两个以上的压雪车的压雪车队。
每个压雪车1都被构造为通过通信单元18来交换数据,并且控制装置17被构造为向其他的(多个)压雪车1发送要在滑道的指定位置处使用的数值组的选择结果。其他的(多个)压雪车被构造为接收数值组的选择结果并且将该选择结果显示在屏幕上,以向操作者发送信息。通过选择装置,操作者可以选择是否使用从远程接收到的或者他/她已在他/她的压雪车1上预先设定的数值组。在一个替代实施方式中,每个控制装置17都基于其接收到的所选择的数值组来控制雪犁组件的参数。
在一个优选实施方式中,滑雪场包括远程中央单元。在手动模式和自动或半自动模式中,每个压雪车1都向滑雪场的对压雪车1的车队中的每个压雪车1的数据进行分析的远程中央单元发送数据。
更详细地,每个控制装置17都存储操作者在其使用期间选择的数值组中的数值并且将它们与检测到的其他参数(例如天气、积雪温度、环境温度、积雪密度、积雪含水量、亮度、斜度、由卫星追踪装置13提供的滑雪场内的位置)进行关联。每个控制装置都限定操作者选择的数值组中的数值与检测到的参数之间的耦合并且将它们发送给远程中央单元。远程中央单元分析从多个控制装置接收到的数据并且例如通过使用统计函数(例如均值、中位数、方差)来处理这些数据,并且限定要在自动模式中使用的数值组的数值。
在一个优选实施方式中,控制装置17被构造为使用与其先前耦合且存储的参数耦合的数值组的数值在自动模式下操作。
在一个优选实施方式中,压雪车1被构造为通过用户编码来启动。控制装置7至少在存储器中存储第一用户编码和第二用户编码。控制装置7被构造为在启动压雪车1时检测操作者通过用户界面输入的用户编码并且基于在第一用户编码与第二用户编码之间输入的用户编码来向或不向其他压雪车1发送数据。
在一个优选实施方式中,压雪车1被构造为通过用户编码来启动。控制装置17至少在存储器中存储第三用户编码和第四用户编码。控制装置7被构造为在启动压雪车1时检测操作者通过用户界面输入的用户编码并且对或不对控制装置的数值组的数值进行改变。
在一个优选实施方式中,压雪车1被构造为通过用户编码来启动。控制装置17至少在存储器中存储第五户编码和第六用户编码。控制装置17被构造为在启动压雪车1时检测操作者通过用户界面输入的用户编码并且在或不在手动、自动或半自动控制中进行选择,换句话说,基于所输入的用户编码,控制装置17能够仅使用手动控制或者能够仅使用自动和/或半自动控制或者能够使用所有的控制模式。
从本说明书可以理解的是,本发明可以扩展至大于或等于二的任何数量的参数,例如,在图5中,本发明被表示为使用五个参数A、B、C、D和E,但是参数的数量可以是两个,即A、B,或者六个,即A、B、C、D、E和F,或者是大于一的任何数量。增加参数的数量提高了压雪车1的自动化效率,并因此提高了驾驶员驾驶压雪车的简易程度。
多个数值组N、M、……、Z可以是大于或等于二的任何数量,并且上文针对两个数值组或四个数值组描述的内容适用于大于或等于二的任何数量的数值组。
在一个优选实施方式中,控制装置17包括从上述的用户编码中选择的大于二的任何数量的用户编码,因此其可以包括上述的六个用户编码或者上述的四个用户编码或者具有上述功能的用户编码的组合。
在本发明的一个优选的、非限制性的实施方式中,压雪车1的雪犁组件9包括通过优选的万向接头彼此连接的两个雪犁9a,并且根据上文所述的模式通过控制装置17控制的参数是以下参数:轴9d的旋转速度和/或旋转方向;雪犁组件9、优选雪犁9a的深度或切割角度;用于调节雪犁组件9沿着竖直轴线的位置的模式,优选包括:雪犁组件9处于固定位置的模式、雪犁组件9除了其自身重量之外在积雪层72上施加特定压力或者减去其自身重量和所施加的压力值的模式以及雪犁组件9处于浮动位置、特别是处于其跟随积雪层72的浮动位置的模式;雪犁9a的工作腔室的容积;调节两个雪犁9a在雪犁组件9中的相对位置的模式,优选包括:两个雪犁9a的相对位置是自由的并因此使得两个雪犁9a可彼此独立地自由移动的模式、两个雪犁9a的位置被固定为使得两个雪犁9a在相对于积雪层72倾斜的平面中形成180°的指定角(特别地,该角朝向积雪层72)的模式、两个雪犁的位置被固定为使得两个雪犁9a在相对于积雪层72倾斜的平面中形成小于180°的指定角(特别地,该角朝向积雪层72)的模式以及两个雪犁9a的位置被固定为使得两个雪犁9a在相对于积雪层72倾斜的平面中形成大于180°的指定角(特别地,该角朝向积雪层72)的模式。
在本发明的另一个优选的、非限制性的实施方式中,压雪车1的雪犁组件9包括通过优选的万向接头彼此连接的两个雪犁9a,并且根据上文所述的模式通过控制装置17控制的参数是以下参数:轴9d的旋转速度和/或旋转方向;优选雪犁9a的深度或切割角度;用于调节雪犁组件9沿着竖直轴线的位置的模式,优选包括:雪犁组件9处于固定位置的模式、雪犁组件除了其自身重量之外在积雪层72上施加特定压力或者减去其自身重量和所施加的压力值的模式以及雪犁组件9处于浮动位置、特别是处于其跟随积雪层72的浮动位置的模式;修整器9b的位置;调节两个雪犁9a在雪犁组件9中的相对位置的模式,优选包括:两个雪犁9a的相对位置是自由的并因此使得两个雪犁9a可彼此独立地自由移动的模式;两个雪犁9a的位置被固定为使得两个雪犁9a在相对于积雪层72倾斜的平面中形成180°的指定角(特别地,该角朝向积雪层72)的模式;两个雪犁9a的位置被固定为使得两个雪犁9a在相对于积雪层72倾斜的平面中形成小于180°的指定角(特别地,该角朝向积雪层72)的模式;以及两个雪犁9a的位置被固定为使得两个雪犁9a在相对于积雪层72倾斜的平面中形成大于180°的指定角(特别地,该角朝向积雪层72)的模式。
Claims (22)
1.一种压雪车,其包括:
沿着纵向轴线(70)延伸的框架(2);
通过连接装置(21)连接至所述框架(2)的雪犁组件(9),优选是包括雪犁(9a)和修整器(9b)的雪犁组件(9);
至少一个控制装置(17),其耦合至所述雪犁组件(9)并且被构造为控制所述雪犁组件(9)的从包括所述雪犁组件(9)的以下参数的组合中选择的至少两个参数(A,B)、优选五个参数(A,B,C,D,E):轴(9d)的旋转速度和/或旋转方向;所述雪犁组件(9)、优选所述雪犁(9a)的深度和/或切割角度;所述雪犁组件(9a)沿着竖直轴线(71)的位置;用于调节所述雪犁组件(9)沿着竖直轴线(71)的位置的模式,优选包括:所述雪犁组件(9)处于固定位置的模式、所述雪犁组件(9)除了其自身重量之外在积雪层(72)上施加特定压力或者减去其自身重量和所施加的压力值的模式以及所述雪犁组件(9)处于浮动位置、特别是处于其跟随所述积雪层(72)的浮动位置的模式;翼片(9e)打开或关闭的位置;所述雪犁(9a)的工作腔室的容积;所述雪犁(9a)相对于水平面(73)的位置;调节所述雪犁(9a)相对于水平面(73)的位置的模式,优选在所述雪犁组件(9)处于固定位置的模式与所述雪犁组件处于浮动位置、特别是处于其跟随所述压雪车(1)的运动的浮动位置的模式之间调节;以及所述修整器(9b)的位置,
所述控制装置(17)包括被构造为存储与所述至少两个参数(A,B)关联的至少两个数值组(N,M)、优选四个数值组(N,M,P,Q)的存储器(19),其中每个所述数值组(N,M)都包括用于所述至少两个参数(A,B)中的每一个的至少一个数值,
所述控制装置(17)被构造为接收至少两个所述数值组(N,M)中的数值组的选择结果并且根据所选择的所述数值组(N;M)的数值来控制所述雪犁组件(9)的所述至少两个参数。
2.根据权利要求1所述的压雪车,其中,每个所述数值组(N,M)都包括用于所述至少两个参数(A,B,C,D,E)中的每一个的第一数值(N’,M’)和第二数值(N”,M”),其中所述第一数值(N’,M’)与所述压雪车(1)的向上运动关联,并且所述第二数值(N”,M”)与所述压雪车(1)的向下运动关联。
3.根据权利要求1所述的压雪车,其中所述控制装置(17)被构造为接收与所述压雪车(1)的向上运动或所述压雪车(1)的向下运动有关的信息,并且根据所接收到的与所述压雪车(1)的运动有关的信息通过使用用于所述至少两个参数的每个数值组的第一数值(N’,M’)或第二数值(N”,M”)来控制所述至少两个参数。
4.根据权利要求1所述的压雪车,其中,所述压雪车(1)包括用户界面,其被构造为从用户接收与所述压雪车(1)的向下运动或向上运动有关的信息,并且其中所述控制装置(17)耦合至所述用户界面,以接收所述信息并且基于从所述用户界面接收到的信息通过使用用于所述至少两个参数(A,B)的每个数值组的第一数值(N’,M’)或第二数值(N”,M”)来控制所述至少两个参数(A,B)。
5.根据权利要求1所述的压雪车,其中,所述压雪车(1)包括第一检测装置(40),其用于检测与所述控制装置(17)通信地连接的所述压雪车(1)的向上运动或向下运动并且向所述控制装置(17)发送与所述压雪车(1)的向上运动或向下运动有关的信息,并且其中所述控制装置(17)基于从所述第一检测装置(40)接收到的信息通过使用用于每个所述数值组(N,M)的第一数值或第二数值来控制所述至少两个参数,所述第一检测装置(40)优选包括倾斜仪和/或卫星追踪装置(13)。
6.根据权利要求1所述的压雪车,其中,至少两个所述数值组(N,M)中的每一个都与彼此不同的相应的积雪情况关联,所述压雪车(1)包括第二检测装置,其用于检测积雪情况并且与所述控制装置(17)通信地耦合,以发送与积雪情况有关的信息,并且其中所述控制装置(17)接收与积雪情况有关的信息并且根据所检测到的积雪情况来选择所述至少两个数值组(N,M)中的一个,用于检测积雪情况的所述第二检测装置(41)优选包括从以下装置的组合中选择的至少一个装置:积雪温度传感器;环境温度传感器;积雪含水率传感器;环境湿度传感器;光线传感器;拍摄积雪表面的摄像机;拍摄积雪表面的热成像摄像机。
7.根据权利要求1所述的压雪车,其中,至少两个所述数值组(N,M)中的每一个都与彼此不同的相应的积雪情况关联,所述压雪车(1)包括用户界面,所述用户界面耦合至所述控制装置(17)并被构造为接收积雪情况的选择结果,并且其中所述控制装置(17)接收与积雪情况有关的信息并且根据所接收到的积雪情况来选择至少两个所述数值组(N,M)中的一个。
8.根据权利要求1所述的压雪车,其中,至少两个所述数值组(N,M)中的每一个都与彼此不同的相应的积雪情况关联,所述压雪车(1)包括射频通信单元(18),所述射频通信单元(18)被构造为接收与天气情况和/或当前日期关联的数据,所述通信单元(18)通信地耦合至所述控制装置(17),以发送与天气情况和/或当前日期有关的信息,并且其中所述控制装置(17)接收与天气情况和/或当前日期有关的信息并且基于接收到的天气情况和/或当前日期来选择至少两个所述数值组(N,M)中的一个。
9.根据权利要求1所述的压雪车,其中,两个所述数值组(N,M)中的每一个都与彼此不同的相应的积雪情况关联,其中所述控制装置(17)包括用于计算日期的计数单元(42),其中所述控制装置(17)根据用于计算日期的所述计数单元(42)所提供的日期来选择两个所述数值组中的一个。
10.根据权利要求1所述的压雪车,其中,所述压雪车(1)包括射频通信单元(18),射频通信单元(18)被构造为接收数据、特别是要使用哪个所述数值组(N,M)的选择结果,所述通信单元(18)通信地耦合至所述控制装置(17),以发送要使用的所述数值组(N,M)的选择结果,并且其中所述控制装置(17)接收要使用的所述数值组的选择结果并且根据通过所述通信单元(18)选择和接收到的所述数值组中的至少一个数值来控制所述雪犁组件的所述参数。
11.根据权利要求1所述的压雪车,其中,所述控制装置(17)被构造为在第一操作模式中记录操作者通过用户界面做出的选择结果并且将它们与一个或多个以下参数进行关联:所述压雪车的位置、空气和/或积雪的温度和/或湿度、接收到的天气数据,所述控制装置(17)被构造为在第二操作模式中基于所述第一操作模式中所记录的数据以及检测到的一个或多个以下参数来在所述第二操作模式中从至少两个所述数值组(N,M)中选择一个数值组:所述压雪车的位置、空气和/或积雪的温度和/或湿度、接收到的天气数据。
12.根据权利要求1所述的压雪车,其包括被构造为允许操作者设定至少一个所述参数的至少两个所述数值组中的至少一个数值中的每一个的用户界面(4),其中所述控制装置(17)被构造为在一个操作模式中记录操作者通过所述用户界面输入的至少一个数值并且将其与一个或多个以下参数进行关联:所述压雪车的位置、空气和/或积雪的温度和/或湿度、接收到的天气数据,所述控制装置(17)被构造为基于第一操作模式中所记录的数据以及检测到的一个或多个以下参数来在所述另一个操作模式中对在第一操作模式中设定的每个数值组的所述至少一个数值进行设定:所述压雪车的位置、空气和/或积雪的温度和/或湿度、接收到的天气数据。
13.根据权利要求1所述的压雪车,其中,所述控制装置(17)被构造为存储多个用户编码并且能够根据操作者在启动所述压雪车时通过用户界面输入的所述用户编码将数据发送给其他的压雪车和/或实现所述压雪车的手动、半自动和自动的操作模式和/或设定每个所述数值组的数值。
14.根据权利要求1所述的压雪车,其中,所述雪犁组件(9)包括通过优选的万向接头连接至所述雪犁(9a)的另一个雪犁(9a),其中权利要求1所述的雪犁组件(9)的所述参数的组合包括:调节两个所述雪犁(9a)在所述雪犁组件(9)中的相对位置的模式,包括:两个所述雪犁的相对位置是自由的并因此使得两个所述雪犁可彼此独立地自由移动的模式;两个所述雪犁的位置被固定为使得两个所述雪犁(9a)朝向所述压雪车(1)形成180°的角度的模式;两个所述雪犁的位置被固定为使得两个所述雪犁(9a)朝向所述压雪车(1)形成小于180°的角度的模式;以及两个所述雪犁(9a)的位置被固定为使得两个所述雪犁(9a)朝向所述压雪车(1)形成大于180°的角度的模式。
15.根据权利要求1所述的压雪车,其中,通过所述控制装置(17)控制的所述参数至少为以下参数:所述轴(9d)的旋转速度和/或旋转方向;优选所述雪犁(9a)的深度或切割角度;用于调节所述雪犁组件(9)沿着竖直轴线的位置的模式,优选包括:所述雪犁组件(9)处于固定位置的模式、所述雪犁组件除了其自身重量之外在积雪层(72)上施加特定压力或者减去其自身重量和所施加的压力值的模式以及所述雪犁组件(9)处于浮动位置、特别是处于其跟随所述积雪层(72)的浮动位置的模式;所述雪犁(9a)的工作腔室的容积和/或所述修整器(9b)的位置。
16.根据权利要求1所述的压雪车,其包括显示屏(4),所述显示屏耦合至所述控制装置(17)并且被构造为表示:所使用的所述参数的所述数值组的数值;与所使用的所述参数的数值关联的最优行驶速度(101);以及优选地与当前使用的所述参数的数值关联的设置、特别是所述压雪车(1)的悬挂的最优配置(102)。
17.根据权利要求1所述的压雪车,其包括显示屏(4),所述显示屏耦合至所述控制装置(17)并且被构造为表示与不同的所述数值组(N,M,P,Q)关联的可通过用户选择的积雪情况(100)以及与每种不同的积雪情况以及所述压雪车(1)的向上运动或向下运动关联的所述参数的数值。
18.一种滑雪场,其包括根据权利要求1所述的压雪车以及至少一个人造雪炮,所述控制装置(17)通信地耦合至所述人造雪炮,以接收与所述人造雪炮是否启动有关的信息,所述控制装置(17)被构造为基于从至少一个所述人造雪炮接收到的信息来选择数值组(N,M,P,Q,R)中的一个。
19.一种履带车辆的车队,其包括至少两个根据权利要求1所述的压雪车,其中所述履带车辆(1)通过它们相应的射频通信单元(18)通信地耦合在一起,其中一个所述履带车辆(1)的控制装置(17)被构造为向另一个所述履带车辆(1)的控制装置(17)发送数值组的选择结果和/或数值组的数值,并且另一个所述履带车辆(1)的所述控制装置(17)根据接收到的所述数值组和/或所述数值来控制雪犁组件的参数。
20.一种对压雪车进行控制的控制方法,所述压雪车包括:沿着纵向轴线(70)延伸的框架(2);通过连接装置(20)连接至所述框架(2)的雪犁组件(9),所述雪犁组件(9)优选包括雪犁(9a)和修整器(9b),
所述方法包括以下步骤:
控制所述雪犁组件(9)的从包括所述雪犁组件(9)的以下参数的组合中选择的至少两个参数(A,B)、优选五个参数(A,B,C,D,E):轴(9d)的旋转速度和/或旋转方向;所述雪犁组件(9)、优选所述雪犁(9a)的深度和/或切割角度;所述雪犁组件(9a)沿着竖直轴线(71)的位置;用于调节所述雪犁组件(9)沿着所述竖直轴线(71)的位置的模式,优选包括:所述雪犁组件(9)处于固定位置的模式、所述雪犁组件(9)除了其自身重量之外在积雪层(72)上施加特定压力或者减去其自身重量和所施加的压力值的模式以及所述雪犁组件(9)处于浮动位置、特别是处于其跟随所述积雪层(72)的浮动位置的模式;翼片(9e)打开或关闭的位置;所述雪犁(9a)的工作腔室的容积;所述雪犁(9a)相对于水平面(73)的位置;调节所述雪犁(9a)相对于所述水平面(73)的位置的模式,优选在所述雪犁组件(9)处于固定位置的模式与所述雪犁组件(9)处于浮动位置、特别是处于其跟随所述压雪车(1)的运动的浮动位置的模式之间调节;以及修整器(9b)的位置;
存储与至少两个所述参数(A,B)关联的至少两个数值组(N,M)、优选四个数值组(N,M,P,Q),其中每个所述数值组(N,M)都包括用于至少两个所述参数(A,B)中的每一个的至少一个数值;
接收至少两个所述数值组中的数值组的选择结果;以及
根据所选择的所述数值组(N;M)的数值来控制所述雪犁组件(9)的所述参数(A,B)。
21.一种计算机程序,其被构造为在处理单元中运行并且实施权利要求20所述的方法的步骤。
22.一种存储装置,其中存储有根据权利要求21所述的计算机程序。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| IT102020000022564 | 2020-09-24 | ||
| IT202000022564 | 2020-09-24 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN114250737A true CN114250737A (zh) | 2022-03-29 |
Family
ID=73793613
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202111122332.3A Pending CN114250737A (zh) | 2020-09-24 | 2021-09-24 | 压雪车和控制压雪车的方法 |
Country Status (4)
| Country | Link |
|---|---|
| EP (2) | EP4660376A3 (zh) |
| CN (1) | CN114250737A (zh) |
| CA (1) | CA3195900A1 (zh) |
| WO (1) | WO2022064443A1 (zh) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10045524A1 (de) * | 2000-09-13 | 2002-03-21 | Kaessbohrer Gelaendefahrzeug | Pistenpflegevorrichtung, Pistenpflegefahrzeug und Verfahren zum Betreiben einer Pistenpflegevorrichtung |
| CN109629503A (zh) * | 2019-01-15 | 2019-04-16 | 吉林大学 | 一种实现电动门式传动的多功能除雪车及其控制方法 |
| CN110184986A (zh) * | 2018-02-23 | 2019-08-30 | 普瑞诺斯股份公司 | 犁雪机及其调节方法 |
| WO2020065607A1 (en) * | 2018-09-27 | 2020-04-02 | Hti Digital Gmbh | Ski resort management system |
| WO2020104860A1 (en) * | 2018-11-20 | 2020-05-28 | Prinoth S.P.A. | Snow groomer vehicle with automated functions and method for controlling a snow groomer vehicle |
| IT201900002017A1 (it) * | 2019-02-12 | 2020-08-12 | Prinoth Spa | Fresa da neve per la preparazione di piste da sci |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA2365602A1 (en) * | 2000-01-28 | 2001-08-02 | Bombardier Inc. | Snow groomer having improved electronic controls |
| DE10141155A1 (de) * | 2001-08-17 | 2003-02-27 | Kaessbohrer Gelaendefahrzeug | Pistenflegefahrzeug mit einem Heckgeräteträger |
-
2021
- 2021-09-24 CN CN202111122332.3A patent/CN114250737A/zh active Pending
- 2021-09-24 EP EP25211033.3A patent/EP4660376A3/en active Pending
- 2021-09-24 CA CA3195900A patent/CA3195900A1/en active Pending
- 2021-09-24 WO PCT/IB2021/058733 patent/WO2022064443A1/en not_active Ceased
- 2021-09-24 EP EP21777594.9A patent/EP4217543B1/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10045524A1 (de) * | 2000-09-13 | 2002-03-21 | Kaessbohrer Gelaendefahrzeug | Pistenpflegevorrichtung, Pistenpflegefahrzeug und Verfahren zum Betreiben einer Pistenpflegevorrichtung |
| CN110184986A (zh) * | 2018-02-23 | 2019-08-30 | 普瑞诺斯股份公司 | 犁雪机及其调节方法 |
| WO2020065607A1 (en) * | 2018-09-27 | 2020-04-02 | Hti Digital Gmbh | Ski resort management system |
| WO2020104860A1 (en) * | 2018-11-20 | 2020-05-28 | Prinoth S.P.A. | Snow groomer vehicle with automated functions and method for controlling a snow groomer vehicle |
| CN109629503A (zh) * | 2019-01-15 | 2019-04-16 | 吉林大学 | 一种实现电动门式传动的多功能除雪车及其控制方法 |
| IT201900002017A1 (it) * | 2019-02-12 | 2020-08-12 | Prinoth Spa | Fresa da neve per la preparazione di piste da sci |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4217543B1 (en) | 2025-11-05 |
| EP4217543C0 (en) | 2025-11-05 |
| US20230366160A1 (en) | 2023-11-16 |
| EP4217543A1 (en) | 2023-08-02 |
| EP4660376A2 (en) | 2025-12-10 |
| EP4660376A3 (en) | 2026-02-18 |
| WO2022064443A1 (en) | 2022-03-31 |
| CA3195900A1 (en) | 2022-03-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7328212B2 (ja) | 建設機械の運転支援システム、建設機械 | |
| JP7481908B2 (ja) | 掘削計画作成装置、作業機械および掘削計画作成方法 | |
| US11142890B2 (en) | System and method of soil management for an implement | |
| KR102508269B1 (ko) | 자동 운전 작업 기계 | |
| CN108603357B (zh) | 机动平路机的控制方法以及机动平路机 | |
| CN113585372B (zh) | 地面接合工具控制系统和方法 | |
| EP4130383B1 (en) | Asphalt finisher | |
| JP6924542B2 (ja) | 情報取得装置および情報管理システム | |
| JP7305581B2 (ja) | 位置情報記録装置、作業車両、位置情報記録方法、位置情報記録プログラム | |
| CN114250737A (zh) | 压雪车和控制压雪车的方法 | |
| EP4596790A2 (en) | Snow groomer vehicle and method of controlling a snow groomer vehicle | |
| JP2023164695A (ja) | 圃場作業機 | |
| US11835970B2 (en) | Unmanned aerial vehicle with work implement view and overview mode for industrial vehicles | |
| US12618212B2 (en) | Snowgroomer and method for controlling a snowgroomer | |
| EP4263949B1 (en) | Snowgroomer and method for controlling a snowgroomer | |
| JP2023171682A (ja) | 作業車両 | |
| CN113355981A (zh) | 机器的自主功能的超控 | |
| US11851832B2 (en) | Machine service set position control system | |
| JP7392689B2 (ja) | 作業車両 | |
| EP4286588A1 (en) | Asphalt road finisher | |
| US20240085910A1 (en) | Route Generation Method, Route Generation System, And Route Generation Program | |
| CN120178760A (zh) | 一种压雪机雪地造型控制系统及方法 | |
| JP2023176884A (ja) | 作業車両 | |
| JP2022099006A (ja) | 作業車両 | |
| JP2024173326A (ja) | 作業管理システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |