CN112893346B - In-pipe composite visual automatic descaling device and descaling method - Google Patents
In-pipe composite visual automatic descaling device and descaling method Download PDFInfo
- Publication number
- CN112893346B CN112893346B CN202110056534.6A CN202110056534A CN112893346B CN 112893346 B CN112893346 B CN 112893346B CN 202110056534 A CN202110056534 A CN 202110056534A CN 112893346 B CN112893346 B CN 112893346B
- Authority
- CN
- China
- Prior art keywords
- descaling
- component
- connector
- ultrasonic
- pipeline
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B9/00—Cleaning hollow articles by methods or apparatus specially adapted thereto
- B08B9/02—Cleaning pipes or tubes or systems of pipes or tubes
- B08B9/027—Cleaning the internal surfaces; Removal of blockages
- B08B9/04—Cleaning the internal surfaces; Removal of blockages using cleaning devices introduced into and moved along the pipes
- B08B9/049—Cleaning the internal surfaces; Removal of blockages using cleaning devices introduced into and moved along the pipes having self-contained propelling means for moving the cleaning devices along the pipes, i.e. self-propelled
- B08B9/0492—Heavy-type cleaning devices, e.g. crawlers with plural cleaning members
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B3/00—Cleaning by methods involving the use or presence of liquid or steam
- B08B3/04—Cleaning involving contact with liquid
- B08B3/10—Cleaning involving contact with liquid with additional treatment of the liquid or of the object being cleaned, e.g. by heat, by electricity or by vibration
- B08B3/12—Cleaning involving contact with liquid with additional treatment of the liquid or of the object being cleaned, e.g. by heat, by electricity or by vibration by sonic or ultrasonic vibrations
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B9/00—Cleaning hollow articles by methods or apparatus specially adapted thereto
- B08B9/02—Cleaning pipes or tubes or systems of pipes or tubes
- B08B9/027—Cleaning the internal surfaces; Removal of blockages
- B08B9/04—Cleaning the internal surfaces; Removal of blockages using cleaning devices introduced into and moved along the pipes
- B08B9/049—Cleaning the internal surfaces; Removal of blockages using cleaning devices introduced into and moved along the pipes having self-contained propelling means for moving the cleaning devices along the pipes, i.e. self-propelled
- B08B9/051—Cleaning the internal surfaces; Removal of blockages using cleaning devices introduced into and moved along the pipes having self-contained propelling means for moving the cleaning devices along the pipes, i.e. self-propelled the cleaning devices having internal motors, e.g. turbines for powering cleaning tools
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Cleaning In General (AREA)
Abstract
The invention discloses an in-pipe composite visual automatic descaling device, which comprises an ultrasonic descaling component, a mechanical descaling component and a power component, wherein the ultrasonic descaling component is arranged in the pipe; the ultrasonic descaling assembly comprises: the ultrasonic descaling device comprises an inner shaft, a four-way connector, a claw head arm rod, an arm rod supporting rod and an ultrasonic descaling claw head; the mechanical descaling assembly comprises: the device comprises a connecting ring, a supporting wheel, a device cavity, a wheel brush, an outer rotor motor, a jet flow component and a connecting disc; the power component is fixedly arranged on one side, far away from the jet flow component, of the connecting disc, and the infrared camera is arranged on the other end portion of the power component. The invention also discloses a composite visual automatic descaling method in the pipe. The in-pipe composite visual automatic descaling device and the descaling method provided by the invention ensure that pipelines with different sizes and various scaling forms can be stably and efficiently cleaned on the premise of not damaging the pipelines, and the descaling effect is visual.
Description
Technical Field
The invention relates to the technical field of pipeline maintenance equipment, in particular to an in-pipe composite visual automatic descaling device and a descaling method.
Background
Pipeline transportation is currently the main route for oil and gas transportation. The medium transported in the pipeline is mainly water and oil, and the medium contains organic matter and H2S、CO2And impurities such as various ions, silt and the like are easily formed, so that scales such as carbonate, sulfate, sulfide and the like are easily formed, the pipeline is blocked, the conveying capacity of the pipeline is reduced, and certain potential safety hazards exist.
The conventional scale treatment technologies mainly include mechanical methods, chemical methods and the like. The chemical descaling mainly comprises the steps of dissolving and removing scales by a chemical method, including cleaning by a chelating agent solvent, pickling and the like, and selecting different chemical reagents aiming at different scales; the mechanical descaling method is mainly characterized in that a cutter head is arranged on a piston, and the piston is pushed by the internal pressure in a gathering and conveying pipeline to drive the cutter head to scrape scale.
However, the conventional mechanical descaling method is difficult to thoroughly remove the dirt, the equipment is easy to damage, the pipe cleaning efficiency is low, the descaling cost is high, and various devices are not perfect.
The investigation and comparative analysis show that the common pipeline descaling device has the following defects:
(1) the pipe cleaning device has the advantages that a visualization device is not available, the descaling effect cannot be judged, the dirt in the pipe is difficult to clean thoroughly, the pipe generally needs to be cleaned repeatedly in the descaling process, equipment is easy to damage, and the pipe cleaning efficiency is low;
(2) the descaling form is single, the effect is unstable, the descaling method is difficult to deal with stubborn adhesive scale generated by carbonate, sulfate, sulfide and the like, the application range is relatively narrow, the descaling method is difficult to carry out in a pipeline, and the descaling method is also weak for descaling corroded pits in the pipeline.
Therefore, how to provide a visual descaling device and method with stable and efficient descaling effect without damaging the pipeline is an urgent problem to be solved by those skilled in the art.
Disclosure of Invention
In view of the above, the invention provides an in-pipe composite visual automatic descaling device and a descaling method, which ensure that pipelines with different sizes and various scaling forms can be cleaned stably and efficiently on the premise of not damaging the pipelines, and the descaling effect is visual.
In order to achieve the purpose, the invention adopts the following technical scheme:
an in-pipe composite visual automatic descaling device comprises an ultrasonic descaling component, a mechanical descaling component and a power component; the ultrasonic descaling assembly comprises: the ultrasonic descaling device comprises a line connector, an inner shaft, a four-way connector, a claw head arm rod supporting rod and an ultrasonic descaling claw head, wherein one end of the inner shaft is fixedly connected with the line connector, and the periphery of the other end of the inner shaft is sleeved with the four-way connector; the plurality of claw head arm rods are arranged and are annularly arranged on the periphery of the four-way connector, one end of each claw head arm rod is hinged with the four-way connector, and the other end of each claw head arm rod is connected with the ultrasonic descaling claw head; a jet flow liquid channel and a line channel are arranged in the inner shaft, a wire outlet is formed in the middle of the inner shaft, and a plurality of liquid outlets are uniformly distributed on the periphery of the inner shaft; one end of the arm lever supporting rod is hinged with the inner shaft, and the other end of the arm lever supporting rod is hinged with the arm lever supporting rod; the ultrasonic descaling claw head is characterized in that a liquid inlet is formed in the claw head arm rod, the liquid inlet and the liquid outlet are communicated through a flexible pipe and are communicated with the jet liquid channel, a jet hole is formed in the bottom of the ultrasonic descaling claw head, and power is supplied to the ultrasonic descaling claw head through an electric wire extending in the wire outlet; the mechanical descaling assembly comprises: the device comprises a connecting ring, a supporting wheel, a device cavity, a wheel brush, an outer rotor motor, a jet flow component and a connecting disc; one end of the connecting ring is fixedly connected with the four-way connector, and the other end of the connecting ring is fixedly connected with the device cavity; the other end of the device cavity is sequentially and fixedly connected with the outer rotor motor, the jet flow component and the connecting disc; the wheel brush is detachably arranged on the outer rotor motor; a plurality of jet nozzles are arrayed in an annular shape on the periphery of the jet member; the supporting wheels are respectively and fixedly arranged on the peripheries of the connecting ring and the connecting disc in a surrounding manner; the power component is fixedly arranged on one side, far away from the jet flow component, of the connecting disc, and an infrared camera is arranged on the other end of the power component.
The invention discloses an in-pipe combined visual automatic descaling device, which integrates ultrasonic wave, mechanical descaling and chemical descaling into a whole, firstly, the structure of scale is changed or becomes loose through chemical reaction, and then, through mechanical descaling and ultrasonic descaling, the action of ultrasonic wave and refractory scale in the device are ensured, energy is saved, efficiency is ensured, and good coping means are provided for different scaling forms; the whole device moves in the pipe through the power component, so that thick and hard scales can be cleaned repeatedly until the scales are completely removed, the ultrasonic energy forms cavitation through the combination of the descaling claw head and the jet liquid with the chemical agent, and the inner wall of the pipeline is not damaged while the descaling effect is ensured; moreover, the infrared camera is arranged at the foremost end of the device, so that the scaling form in the pipe and the abnormal conditions in the pipe can be observed through the infrared camera, the descaling effect in the pipe can also be observed, the place which is not thoroughly cleaned is repeatedly cleaned, and the visualization of the descaling effect is achieved.
Preferably, the ultrasonic descaling claw head comprises a connector, a flat plate, an ultrasonic transducer and an arc-shaped vertical plate, the connector is fixedly connected with the claw head arm rod, and the bottom of the connector is provided with the jet hole; one end of the flat plate is fixedly connected with the other side of the connector, and the other end of the flat plate is fixedly connected with the arc-shaped vertical plate; the ultrasonic transducer is connected to the flat plate in a threaded manner; a plurality of toothed nails are detachably mounted on the arc-shaped vertical plate.
The technical scheme has the advantages that the ultrasonic transducer has the function of converting input electric power into mechanical power, namely ultrasonic waves and then transmitting the mechanical power out; the flat plate plays a role in connecting and supporting the arc-shaped vertical plate; the toothed nails are used for rubbing the inner wall of the pipeline in a scraping manner, so that effective descaling is realized.
Preferably, two rows of the toothed nails are uniformly distributed, and the hardness of the material of the toothed nails is lower than that of the pipeline to be cleaned; still install the shock attenuation component on the claw head armed lever, just the shock attenuation component with connector fixed connection.
Adopt above-mentioned technical scheme's beneficial effect is that, the tooth nail material hardness is less than the pipeline that will clear up, is favorable to the scale removal, installs the shock attenuation component on the claw head armed lever, can realize the cushioning effect of claw head armed lever during operation.
Preferably, a spring is arranged in the device cavity, the length of the spring is 2cm longer than that of the placing channel of the spring, and the spring is in a compressed state when the connecting ring is connected and installed with the four-way connector.
The technical scheme has the beneficial effects that the compressed spring applies axial force to the inner shaft, and the inner shaft moves axially and enables the claw head arm rod to be opened outwards through the arm rod supporting rod.
Preferably, a sealing gasket is arranged between the connecting disc and the jet flow component; the device cavity is cut into two parts from the middle, a sealing ring is arranged between the two parts, the cut parts are connected through a connecting sheet in an annular array, and the connecting sheet is fixed on the outer wall of the device cavity.
The beneficial effect of adopting above-mentioned technical scheme is that, the part that device chamber two parts are connected is equipped with the recess, and the recess size communicates with each other with the connection piece to supply the connection piece embedding, every connection piece all through two screw fixation on device chamber outer wall.
Preferably, the power component is connected with the connecting disc through a linkage shaft and a universal joint, the linkage shaft is connected with a joint connected with the connecting disc through threads, the linkage shaft is divided into a shell, bearings and a rotor part, the bearings are provided with two rows and are provided with baffle plates in the front and back, and the rotor is arranged between the two rows of bearings; the universal joint comprises a first connector, a cross connector and a second connector, the first connector is welded with the linkage shaft rotor, the second connector is welded with a connecting plate of the power component, and an annular hollow structure is arranged in the universal joint and used for a circuit to pass through.
The beneficial effect who adopts above-mentioned technical scheme is that, power component and connection pad connected mode are simple, and the flexibility chamber.
Preferably, the power member comprises a power member main body, a support ring, a damping support rod and a crawler, wherein the support ring is respectively provided with one at two ends of the power member main body, a wire outlet is arranged in the middle of the power member main body and is in threaded connection with the power member main body, and a plurality of connectors are annularly arrayed on the periphery of the support ring and are provided with through holes; one end of the damping support rod is fixedly connected with the connector, and the other end of the damping support rod is fixedly connected with the tracked vehicle; the number of the tracked vehicles is consistent with that of the connectors; the middle part of the crawler is provided with a wire inlet, and a line is led out from the power member main body wire outlet and enters from the crawler wire inlet.
Adopt above-mentioned technical scheme's beneficial effect is, the tracked vehicle provides the power that moves forward for whole device, and the support ring plays the connecting action of power component main part and shock attenuation bracing piece, and the effect that shock attenuation bracing piece realized shock attenuation and support to the tracked vehicle.
Preferably, the tracked vehicle with the connector is three, and every the tracked vehicle passes through four the shock attenuation bracing piece with the connector is connected.
The beneficial effect of adopting above-mentioned technical scheme is, when can satisfying stable operation requirement, reduction in manufacturing cost.
Preferably, an infrared camera support is fixedly arranged at the end part of the power member main body, and two blocking pieces which are oppositely arranged are fixed at the end part of the infrared camera support; the infrared camera is embedded into the blocking piece and is rotationally connected with the blocking piece through a screw.
The technical scheme has the advantages that the infrared camera can rotate, and multi-angle detection can be realized; meanwhile, the infrared camera can observe abnormal conditions in the pipe and can observe whether the descaling is thorough or not, so that the descaling effect of the whole device is visual.
The invention also discloses an in-pipe composite visual automatic descaling method, which utilizes the descaling device to comprise the following steps:
a. fixing the pipeline to be descaled, selecting a wheel brush with a proper size according to the diameter of the pipeline to be cleaned, installing the wheel brush on an outer rotor motor, selecting a tooth nail with proper hardness according to the material of the pipeline to be cleaned, installing the tooth nail on an arc-shaped vertical plate, and judging the scaling type according to a pipeline conveying medium so as to match with a proper chemical injection liquid;
b. firstly, extruding a tracked vehicle of a power component to compress a damping support rod so as to enable the power component to be placed in a pipeline, connecting a line joint to a line connecting head, and enabling the power component to slowly advance by using a control device;
c. adjusting the position of the mechanical descaling component to enable the mechanical descaling component to enter the pipeline, and enabling the power component and the mechanical descaling component to slowly advance by using the control device;
d. when the whole mechanical descaling device completely enters a pipeline, the claw head arm rods of the ultrasonic descaling component are compressed inwards to enable the four claw head arm rods to contract inwards, and at the moment, the whole device is slowly moved forwards by using the control device, and the claw head arm rods are compressed and pushed forwards to enable the ultrasonic descaling component to enter the pipeline;
e. when the whole in-pipe descaling device completely enters the interior of a pipeline to be cleaned, a liquid supply switch is turned on, jet liquid with chemical medicines is made to react with scale, an outer rotor motor switch is turned on, mechanical descaling operation is started, finally an ultrasonic transducer switch is turned on, the whole descaling operation is started, the degree of scaling is judged through in-pipe images transmitted by an infrared camera, and the gear of the control device is adjusted according to the degree of scaling to give different descaling strengths;
f. make whole scale removal device round trip movement in intraductal clear up the pipeline through control power component, infrared camera observes the scale removal condition or the abnormal conditions, clears up repeatedly to the place that the scale deposit is serious, reaches the effect to whole pipeline clean up.
Through the technical scheme, compared with the prior art, the invention discloses and provides an in-pipe composite visual automatic descaling device and a descaling method, and the device and the method have the following advantages:
(1) combine ultrasonic wave, machinery and chemical descaling in an organic whole, earlier through chemical reaction, make the dirty structure change, or become crisp pine, through mechanical descaling and ultrasonic wave scale removal, guarantee that the ultrasonic wave acts on the intractable dirt of nexine, the energy saving guarantees efficiency, all has good reply means to different scale deposit forms, through setting up the device into scalability, applicable in the pipeline of not unidimensional.
(2) Can make whole device advance in intraductal through the power component, can clear up repeatedly until thoroughly cleaing away thick and heavy stubborn dirt, built-in damping device, ultrasonic energy is through scale removal claw head to arc riser, at last through the profile spike vertical action on the pipe wall, combines the jet-flow liquid formation cavitation effect of taking chemical, does not damage the pipeline inner wall when guaranteeing scale removal efficiency.
(3) Be equipped with infrared camera at the device front end, both accessible its in observation pipe scale deposit form and intraductal abnormal conditions, also can observe intraductal scale removal effect to clear up repeatedly to the place that does not clear up thoroughly, it is visual to reach the scale removal effect.
Drawings
In order to more clearly illustrate the embodiments of the present invention or the technical solutions in the prior art, the drawings used in the description of the embodiments or the prior art will be briefly described below, it is obvious that the drawings in the following description are only embodiments of the present invention, and for those skilled in the art, other drawings can be obtained according to the provided drawings without creative efforts.
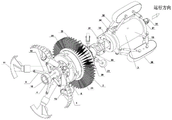
Fig. 1 is an overall schematic view of an in-tube composite automatic descaling and visualization device according to an embodiment of the present invention.
FIG. 2 is a schematic view of an ultrasonic descaling component according to an embodiment of the present invention.
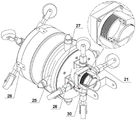
FIG. 3 is a schematic view of the connection between the ultrasonic descaling component and the mechanical descaling component according to the embodiment of the present invention.
Fig. 4 is a schematic view illustrating details of a northeast measurement of a mechanical descaling component according to an embodiment of the present invention.
Fig. 5 is a schematic diagram illustrating details of the mechanical descaling component measured in the southwest direction according to the embodiment of the present invention.
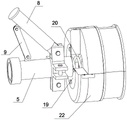
FIG. 6 is a schematic diagram illustrating details of a power component provided in accordance with an embodiment of the present invention.
The various references in the drawings are:
1-ultrasonic descaling component; 2-mechanical descaling means; 3-a power component; 4-a line connector; 5-inner shaft; 6-a four-way connector; 7-pins; 8-claw head arm rod; 9-arm lever support rod; 10-a shock absorbing member; 11-ultrasonic descaling claw head; 12-an ultrasonic transducer; 13-jet hole; 14-a toothed nail; 15-arc vertical plates; 16-a first outlet; 17-a liquid outlet; 18-a liquid inlet; 19-a connecting ring; 20-a spring; 21-a support wheel; 22-device lumen; 23-wheel brush; 24-an outer rotor motor; 25-a fluidic member; 26-a connecting disc; 27-a sealing gasket; 28-connecting pieces; 29-a jet nozzle; 30-a linkage shaft; 31-a universal joint; 32-a connecting plate; 33-a power member body; 34-a support ring; 35-a shock-absorbing support bar; 36-a crawler; 37-infrared camera support; 38-infrared camera, 39-baffle plate; 40-a cross connector, 41-a first connector, 42-a second connector, 43-a connector, 44-a flat plate and 45-a second outlet.
Detailed Description
The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the drawings in the embodiments of the present invention, and it is obvious that the described embodiments are only a part of the embodiments of the present invention, and not all of the embodiments. All other embodiments, which can be derived by a person skilled in the art from the embodiments given herein without making any creative effort, shall fall within the protection scope of the present invention.
Referring to fig. 1, the in-tube composite automatic descaling and visualization device provided by the invention comprises an ultrasonic descaling component 1, a mechanical descaling component 2 and a power component 3;
referring to fig. 2, the ultrasonic descaling component 1 is provided with a line connector 4, an inner shaft 5 and a four-way connector 6 from bottom to top, wherein the four-way connector 6 is connected with 4 claw head arm rods 8 through 4 pins 7, the claw head arm rods 8 are connected with arm rod support rods 8 through the pins 7, the arm rod support rods 9 are connected with the inner shaft through the pins 7, the front ends of the claw head arm rods 8 are provided with damping components 10, and the damping components 10 are connected with descaling claw heads 11;
the descaling claw head 11 is divided into four parts, namely a connector, a flat plate and an arc vertical plate 15 of the ultrasonic transducer 12, the lower part of the descaling claw head is welded with a support bar to fixedly connect the three parts, namely the connector 43, the flat plate 44 and the arc vertical plate 15, the ultrasonic transducer 12 and the flat plate 44 are connected through threads, the bottom of the connector 43 is provided with a jet hole 13, the arc vertical plate 15 is provided with two rows of 18 toothed nails 14, the angle is vertical to the horizontal plane when the arc vertical plate 15 is welded with the flat plate 44, the hardness of the toothed nails 14 is lower than that of a pipeline to be cleaned, and the toothed nails can be replaced according to different pipelines;
the chemical jet agent sprayed from the jet hole 13 and the energy produced by the ultrasonic transducer 12 provide cavitation to carry out secondary cleaning on the scale which can not be cleaned by the front mechanical descaling component 2, thus ensuring descaling efficiency and thoroughness;
the inner shaft 5 is provided with a jet flow liquid channel and a line channel, the middle of the shaft is provided with 1 first outlet 16, 1 liquid outlet 17 is respectively arranged in 4 directions, the claw head arm rod 8 is provided with a liquid inlet 18, the liquid inlet 18 and the liquid outlet 17 can be connected by a flexible pipeline to form the jet flow liquid channel, and the ultrasonic transducer 12 can supply power to the ultrasonic transducer through an electric wire extending in the first outlet 16.
Referring to fig. 3, the ultrasonic descaling member 1 is connected with the connecting ring 19 through the four-way connector 6, and the connecting ring 19 is connected with the mechanical descaling member 2 through 4 screws; 1 spring 20 is arranged in the mechanical descaling component 2, the length of the spring 20 is greater than that of a placing channel thereof by 2cm, when the connecting ring 19 is connected and installed with the mechanical descaling component 2, the spring 20 is in a compressed state, the compressed spring 20 applies axial force to the inner shaft 5, the inner shaft 5 axially moves, and the claw head arm rods 8 are outwards opened through the arm rod supporting rods 9;
the whole ultrasonic descaling component 1 is contracted to be suitable for pipelines with different sizes by inwards compressing the four claw head arm rods 8, the four claw head arm rods 8 are expanded to be attached to the pipe wall by the axial force of the inner shaft 5 given by the spring 20 compressed after the pipeline is placed, and high-speed chemical agents can be sprayed out of the jet hole 13, so that the chemical agents can chemically react with scales to fall off, and cavitation can be formed with ultrasonic waves to improve descaling efficiency.
Referring to fig. 4, the mechanical descaling component 2 is divided into six parts, namely a support wheel 21, a device cavity 22, a wheel brush 23, an outer rotor motor 24 and a jet component 25, wherein the support wheel 21 is provided with 4 parts respectively at the front and the back of the mechanical descaling component 2, a damping unit is arranged on an arm rod of the support wheel 21, the 4 support wheels 21 close to the ultrasonic descaling component 1 are connected with a connecting ring 19 in a welding manner, the 4 support wheels 21 close to the power component 3 are annularly arrayed and welded on the connecting plate 26, the connecting plate 26 is connected with the mechanical descaling component 2 through 6 screws, and a sealing gasket 27 is arranged between the support wheels 21 and the connecting ring 26;
the device cavity 22 is divided into two parts from the middle, a sealing ring is arranged between the two parts, the two divided parts are connected through 4 connecting pieces 28 in an annular array, a groove is arranged at the position where the two parts of the device cavity 22 are connected, the size of the groove is equal to that of the connecting pieces 28 so as to enable the connecting pieces 28 to be embedded in, and each connecting piece 28 is fixed on the device cavity 22 through two screws;
chemical agents sprayed out of the jet flow component 25 can chemically react with the scale, so that the scale structure is changed, loosened or fallen off, and the process of mechanical descaling through the wheel brush is accelerated, so that the descaling efficiency is improved;
the wheel brush 23 and the outer rotor motor 24 are installed together to provide a mechanical descaling function for the whole device, the wheel brush 23 can be disassembled, wheel brushes with different sizes and brush bristles made of different materials can be used according to different pipe diameters and descaling strength, 4 jet nozzles 29 are annularly arrayed on the jet component 25, the bottoms of the nozzles are welded with the device, and nozzle heads are connected through threads; the front and the back of the mechanical descaling component 2 are provided with eight supporting wheels 21, so that the ultrasonic descaling component 1 and the mechanical descaling component 2 can keep balance and stability during operation.
Referring to fig. 5 and fig. 1, a power component 3 is connected with a mechanical descaling component 2 through a universal joint 31 and a linkage shaft 30, the linkage shaft 30 is connected with a joint connected with a connecting disc 26 through threads, the joint is connected through 4 screws, the linkage shaft 30 is divided into a shell, a bearing and a rotor 3, the bearing is provided with two rows, baffles are arranged at the front and the back of the bearing, and the rotor is arranged between the two rows of bearings;
the universal joint 31 is divided into a first connector 41, a cross connector 42 and a second connector 42, the first connector 41 is welded with the rotor of the universal shaft 30, the second connector 42 is welded with the connecting plate 32 of the power component 3, and the universal joint 31 is internally provided with a ring shape and is hollow for a circuit to pass through.
Referring to fig. 6, the power member 3 is composed of four parts, namely a power member main body 33, a support ring 34, a damping support rod 35 and a crawler 36, wherein the support ring 34 is provided with one support ring at each of the front end and the rear end of the power member main body 33, a second outlet 45 is arranged in the middle of the power member main body 33 and connected with the power member main body through threads, and the support ring 33 is annularly arrayed with 3 connectors and is provided with through holes;
damping support rod 35 one end is connected with support ring 33 connector through pin and round pin axle, the other end also is connected with tracked vehicle 36 through pin and round pin axle, and every bracing piece 35 all is equipped with the shock attenuation unit, both can cushion, also can compress and change the diameter of whole power component 3, can use at not unidimensional pipeline, 3 tracked vehicle 36 annular array is around power component main part 33, every tracked vehicle 36 is connected with support ring 33 through 4 damping support rod 35, and be equipped with the inlet wire in the centre, the circuit goes out from the second outlet wire 45 of power component main part 33, get into from tracked vehicle 36 inlet wire.
Referring to fig. 6, the front end of the power member 3 is provided with an infrared camera 38, the infrared camera 38 is connected with the power member main body 33 through an infrared camera support 37, and the infrared camera support 37 is connected with the power member main body 33 through 3 screws; the front end of the infrared camera support 37 is provided with two blocking pieces 39, the infrared camera 38 is embedded into the blocking pieces 39 and connected through a screw, and the infrared camera 38 can rotate around the screw in the blocking pieces 39; the infrared camera 38 is arranged at the foremost end of the device, so that the abnormal conditions in the pipe can be observed, and whether descaling is thorough or not can be observed, so that the descaling effect of the whole device is visual.
The invention also discloses an in-pipe composite visual automatic descaling method, which utilizes the descaling device to comprise the following steps:
a. fixing the pipeline to be descaled, selecting a wheel brush 23 with a proper size according to the diameter of the pipeline to be cleaned, installing the wheel brush on an outer rotor motor 24, selecting a tooth nail 14 with proper hardness according to the material of the pipeline to be cleaned, installing the tooth nail on an arc-shaped vertical plate 15, judging the scaling type according to a pipeline conveying medium, and matching with a proper chemical injection liquid;
b. firstly, the caterpillar 36 of the power component 3 is extruded to compress the damping support rod 35 so as to put the power component 3 into the pipeline, the line joint is connected to the line connector 4, and the control device is used for enabling the power component 3 to advance slowly;
c. adjusting the position of the mechanical descaling component 2 to enable the mechanical descaling component to enter the pipeline, and enabling the power component 3 and the mechanical descaling component 2 to slowly advance by using a control device;
d. when the whole mechanical descaling device 2 completely enters a pipeline, the claw head arm rods 8 of the ultrasonic descaling component 1 are compressed inwards to enable the four claw head arm rods 8 to contract inwards, and at the moment, the whole device slowly moves forwards by using a control device, and the claw head arm rods 8 are compressed and pushed forwards to enable the ultrasonic descaling component 1 to enter the pipeline;
e. when the whole in-pipe descaling device completely enters the interior of a pipeline to be cleaned, a liquid supply switch is turned on, jet liquid with chemical medicines is made to react with scale, an outer rotor motor 24 is turned on, mechanical descaling operation is started, finally an ultrasonic transducer 12 is turned on, the whole descaling operation is started, the degree of scaling is judged through in-pipe images transmitted by an infrared camera 38, the gear of the control device is adjusted according to the degree of scaling, and different descaling strengths are given;
f. make whole scale removal device round trip movement in intraductal clear up the pipeline through control power component 3, infrared camera 38 observes the scale removal condition or other abnormal conditions, clears up repeatedly to the place that the scale deposit is serious, reaches the effect to whole pipeline clean up.
The embodiments in the present description are described in a progressive manner, each embodiment focuses on differences from other embodiments, and the same and similar parts among the embodiments are referred to each other. The device disclosed by the embodiment corresponds to the method disclosed by the embodiment, so that the description is simple, and the relevant points can be referred to the method part for description.
The previous description of the disclosed embodiments is provided to enable any person skilled in the art to make or use the present invention. Various modifications to these embodiments will be readily apparent to those skilled in the art, and the generic principles defined herein may be applied to other embodiments without departing from the spirit or scope of the invention. Thus, the present invention is not intended to be limited to the embodiments shown herein but is to be accorded the widest scope consistent with the principles and novel features disclosed herein.
Claims (7)
1. An in-pipe composite visual automatic descaling device is characterized by comprising an ultrasonic descaling component (1), a mechanical descaling component (2) and a power component (3);
the ultrasonic descaling assembly (1) comprises: the ultrasonic descaling device comprises a line connector (4), an inner shaft (5), a four-way connector (6), a claw head arm rod (8), an arm rod supporting rod (9) and an ultrasonic descaling claw head (11), wherein one end of the inner shaft (5) is fixedly connected with the line connector (4), and the periphery of the other end of the inner shaft is sleeved with the four-way connector (6); a plurality of claw head arm rods (8) are arranged and are annularly arranged on the periphery of the four-way connector (6), one end of each claw head arm rod is hinged with the four-way connector (6), and the other end of each claw head arm rod is connected with the ultrasonic descaling claw head (11); a jet flow liquid channel and a line channel are arranged in the inner shaft (5), a first outlet (16) is formed in the middle of the inner shaft (5), and a plurality of liquid outlets (17) are uniformly distributed on the periphery of the first outlet; one end of the arm rod supporting rod (9) is hinged with the inner shaft (5), and the other end of the arm rod supporting rod is hinged with the claw head arm rod (8); a liquid inlet (18) is formed in the claw head arm rod (8), the liquid inlet (18) is communicated with the liquid outlet (17) through a flexible pipe and is communicated with the jet liquid channel, a jet hole (13) is formed in the bottom of the ultrasonic descaling claw head (11), and power is supplied to the ultrasonic descaling claw head through a wire extending in the first wire outlet (16); the ultrasonic descaling claw head (11) comprises a connector (43), a flat plate (44), an ultrasonic transducer (12) and an arc-shaped vertical plate (15), the connector (43) is fixedly connected with the claw head arm rod (8), and the bottom of the connector is provided with the jet hole (13); one end of the flat plate (44) is fixedly connected with the other side of the connector (43), and the other end of the flat plate is fixedly connected with the arc-shaped vertical plate (15); the ultrasonic transducer (12) is in threaded connection with the flat plate (44); a plurality of toothed nails (14) are detachably mounted on the arc-shaped vertical plate (15); two rows of the toothed nails (14) are uniformly distributed, and the hardness of the material of the toothed nails is lower than that of the pipeline to be cleaned; the claw head arm rod (8) is also provided with a damping component (10), and the damping component (10) is fixedly connected with the connector (43);
the mechanical descaling assembly (2) comprises: the device comprises a connecting ring (19), a supporting wheel (21), a device cavity (22), a wheel brush (23), an outer rotor motor (24), a jet component (25) and a connecting disc (26); one end of the connecting ring (19) is fixedly connected with the four-way connector (6), and the other end of the connecting ring is fixedly connected with the device cavity (22); the other end of the device cavity (22) is fixedly connected with the outer rotor motor (24), the jet flow component (25) and the connecting disc (26) in sequence; the wheel brush (23) is detachably arranged on the outer rotor motor (24); a peripheral annular array of said fluidic member (25) having a plurality of fluidic nozzles (29); the supporting wheels (21) are provided with a plurality of fixing rings which are respectively arranged on the peripheries of the connecting ring (19) and the connecting disc (26);
the power assembly (3) is fixedly arranged on one side, away from the jet flow component (25), of the connecting disc (26), and an infrared camera (38) is arranged at the other end of the power assembly; the power assembly (3) is connected with the connecting disc (26) through a linkage shaft (30) and a universal joint (31), the linkage shaft (30) is connected with a joint connected with the connecting disc (26) through threads, the linkage shaft (30) is divided into a shell, a bearing and a rotor part, the bearing is provided with two rows of bearings, baffles are arranged at the front and the back of the bearing, and the rotor is arranged between the two rows of bearings; the universal joint (31) is divided into a first connector (41), a cross connector (43) and a second connector (42) to form, the first connector is welded with a rotor of the universal shaft (30), the second connector (42) is welded with a connecting plate (32) of the power assembly (3), and an annular and a hollow structure are arranged in the universal joint (31) to allow a circuit to pass through.
2. The in-tube composite visual automatic descaling device according to claim 1, wherein a spring (20) is arranged in the device cavity (22), the length of the spring (20) is 2cm longer than that of the placing channel, and the spring (20) is in a compressed state when the connecting ring (19) is connected and installed with the four-way connector (6).
3. The in-pipe composite visual automatic descaling device according to claim 1, wherein a sealing gasket (27) is arranged between the connecting disc (26) and the jet component (25); the device cavity (22) is divided into two parts from the middle, a sealing ring is arranged between the two parts, the divided parts are connected through a ring array of connecting pieces (28), and the connecting pieces (28) are fixed on the outer wall of the device cavity (22).
4. The in-pipe composite visual automatic descaling device according to claim 1, wherein the power assembly (3) comprises a power assembly main body (33), a support ring (34), a shock absorption support rod (35) and a crawler (36), the support ring (34) is provided with one each at two ends of the power assembly main body (33), a second outlet (45) is provided in the middle of the power assembly main body (33) and is in threaded connection with the power assembly main body, and a plurality of connectors (43) are annularly arrayed on the periphery of the support ring (34) and provided with through holes; one end of the damping support rod (35) is fixedly connected with the connector (43), and the other end of the damping support rod is fixedly connected with the crawler (36); the number of the tracked vehicles (36) is consistent with that of the connectors (43); the middle part of the tracked vehicle (36) is provided with a wire inlet, and a line is led out from a wire outlet of the power assembly main body (33) and is led in from the wire inlet of the tracked vehicle (36).
5. The in-pipe composite visual automatic descaling device according to claim 4, wherein the tracked vehicle (36) and the connecting head (43) are three, and each tracked vehicle (36) is connected with the connecting head (43) through four damping support rods (35).
6. The in-pipe composite visual automatic descaling device according to claim 4, wherein an infrared camera support (37) is fixedly arranged at the end of the power assembly main body (33), and two opposite blocking pieces (39) are fixed at the end of the infrared camera support (37); the infrared camera (38) is embedded into the blocking piece (39) and is rotationally connected with the blocking piece (39) through a screw.
7. An in-tube composite visual automatic descaling method, which utilizes the in-tube composite visual automatic descaling device described in any one of the above 1-6, and comprises the following steps:
a. fixing the pipeline to be descaled, selecting a wheel brush (23) with a proper size according to the diameter of the pipeline to be cleaned, installing the wheel brush on an outer rotor motor (24), selecting a tooth nail (14) with proper hardness according to the material of the pipeline to be cleaned, installing the tooth nail on an arc-shaped vertical plate (15), and judging the scaling type according to a pipeline conveying medium so as to match with a proper chemical injection liquid;
b. firstly, a tracked vehicle (36) of a power assembly (3) is extruded to compress a damping support rod (35) so as to place the power assembly (3) into a pipeline, a line joint is connected to a line connector (4), and the power assembly (3) is slowly advanced by using a control device;
c. adjusting the position of the mechanical descaling component (2) to enable the mechanical descaling component to enter the pipeline, and using a control device to enable the power component (3) and the mechanical descaling component (2) to slowly advance;
d. when the whole mechanical descaling component (2) completely enters a pipeline, the claw head arm rods (8) of the ultrasonic descaling component (1) are compressed inwards to enable the four claw head arm rods (8) to contract inwards, at the moment, the whole device is slowly moved forwards by using a control device, and the claw head arm rods (8) are compressed and pushed forwards to enable the ultrasonic descaling component (1) to enter the pipeline;
e. when the whole in-pipe descaling device completely enters the interior of a pipeline to be cleaned, a liquid supply switch is turned on to enable jet liquid with chemical medicines to react with scale, an outer rotor motor (24) switch is turned on, mechanical descaling operation starts, finally, an ultrasonic transducer (12) switch is turned on, the whole descaling operation starts, the scaling degree is judged according to in-pipe images transmitted by an infrared camera (38), and the gear of the control device is adjusted according to the scaling degree to give different descaling strengths;
f. make whole scale removal device round trip movement in intraductal clear up the pipeline through control power component (3), infrared camera (38) observe the scale removal condition or abnormal conditions, handle repeatedly the place that the scale deposit is serious, reach the effect to whole pipeline clean up.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110056534.6A CN112893346B (en) | 2021-01-15 | 2021-01-15 | In-pipe composite visual automatic descaling device and descaling method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110056534.6A CN112893346B (en) | 2021-01-15 | 2021-01-15 | In-pipe composite visual automatic descaling device and descaling method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN112893346A CN112893346A (en) | 2021-06-04 |
| CN112893346B true CN112893346B (en) | 2022-05-17 |
Family
ID=76113623
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202110056534.6A Active CN112893346B (en) | 2021-01-15 | 2021-01-15 | In-pipe composite visual automatic descaling device and descaling method |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN112893346B (en) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113617759B (en) * | 2021-07-07 | 2022-11-18 | 陕西森格索尔科技有限公司 | A multiple inner loop oil pipe scale removal device for oil field exploitation |
| CN114484144A (en) * | 2022-02-18 | 2022-05-13 | 吉林大学 | Underground pipeline detection trolley based on ultrasonic principle and control method thereof |
| CN114618826A (en) * | 2022-03-04 | 2022-06-14 | 中国计量大学 | Ultrasonic pipeline cleaning assembly and cleaning method thereof |
| CN115069700B (en) * | 2022-06-07 | 2023-05-23 | 重庆电子工程职业学院 | Ventilation pipeline cleans machine people |
| CN116159824B (en) * | 2022-12-02 | 2024-10-18 | 三峡大学 | Automatic cleaning device and method for boiler pipeline dirt |
| CN115780430B (en) * | 2023-02-06 | 2023-04-18 | 山西中煤东坡煤业有限公司 | Mine drainage pipe inner wall cleaning device |
Citations (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20100012571A (en) * | 2008-07-29 | 2010-02-08 | (주)아이비에스엔지니어링 | Remote controlled robot for cleaning the interior of duct |
| CN201427125Y (en) * | 2009-03-31 | 2010-03-24 | 王成军 | Pipe scale removal robot |
| CN203875077U (en) * | 2014-05-21 | 2014-10-15 | 中国石油大学(华东) | Ultrasonic and mechanical hybrid descaling device adaptive to variable pipeline diameter |
| CN106238415A (en) * | 2016-07-16 | 2016-12-21 | 张�浩 | A kind of petroleum pipeline inwall datatron with cleaning, drying function |
| CN106513390A (en) * | 2016-12-20 | 2017-03-22 | 鞍钢贝克吉利尼水处理有限公司 | Pipeline cleaning method and adopted remote control rotary cleaning type pipeline cleaning robot |
| CN107262467A (en) * | 2017-06-26 | 2017-10-20 | 长春理工大学 | Intelligent creeping robot device for pipeline cleaning |
| CN108772389A (en) * | 2018-05-10 | 2018-11-09 | 湖北文理学院 | A kind of pipeline cleaning machine people |
| CN109465260A (en) * | 2018-12-12 | 2019-03-15 | 河海大学常州校区 | A kind of pipeline cleaning robot |
| CN109538163A (en) * | 2019-01-29 | 2019-03-29 | 吉林大学 | A kind of ultrasonic activation combined type well-washing device and pumping and washing process |
| CN209094096U (en) * | 2018-11-12 | 2019-07-12 | 牛斐 | A kind of oilfield chemical cleaning device used in oil pipe with scale |
| CN209124547U (en) * | 2018-10-23 | 2019-07-19 | 李静玮 | A kind of heating and ventilating pipeline scale remove device |
| CN209255409U (en) * | 2018-10-17 | 2019-08-16 | 张军 | Oil field gathering and transportation pipeline apparatus for eliminating sludge |
| CN110238139A (en) * | 2019-07-03 | 2019-09-17 | 苏州力佳达电子科技有限公司 | Pipe dredging underwater robot with ultrasonic wave addi-tional crusher |
| CN209550164U (en) * | 2018-08-31 | 2019-10-29 | 深圳市红树林环保科技有限公司 | A kind of apparatus for eliminating sludge in pipe of Treated sewage reusing equipment |
| CN110449421A (en) * | 2019-08-23 | 2019-11-15 | 安徽品冠管业有限公司 | Heating and ventilating pipeline scale remove device |
| CN110701429A (en) * | 2019-10-15 | 2020-01-17 | 西安石油大学 | Petroleum pipeline cleaning and detecting robot |
| CN210253413U (en) * | 2019-07-16 | 2020-04-07 | 陕西中建建乐智能机器人有限公司 | Ultrasonic pipeline cleaning robot |
| CN111036626A (en) * | 2019-12-25 | 2020-04-21 | 西安石油大学 | Oil field gathering and transportation pipeline multi-occasion intelligent reducing and descaling device |
| CN111589808A (en) * | 2020-05-27 | 2020-08-28 | 常州机电职业技术学院 | Oil pipeline inner wall scale removal device |
| CN211965247U (en) * | 2020-03-17 | 2020-11-20 | 曹芳 | Novel municipal administration water supply and drainage pipeline clearance device |
| CN212093587U (en) * | 2020-02-17 | 2020-12-08 | 马波 | Defeated pipeline scale removal device of collection |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB0405310D0 (en) * | 2004-03-09 | 2004-04-21 | Prototech As | Pipeline pig |
| US20090307891A1 (en) * | 2008-06-17 | 2009-12-17 | Ge-Hitachi Nuclear Energy Americas Llc | Method and apparatus for remotely inspecting and/or treating welds, pipes, vessels and/or other components used in reactor coolant systems or other process applications |
| US8805579B2 (en) * | 2011-02-19 | 2014-08-12 | Richard Arthur Skrinde | Submersible robotically operable vehicle system for infrastructure maintenance and inspection |
| CN102489481B (en) * | 2011-12-05 | 2014-12-31 | 上海电力学院 | Coal-fired power station boiler air duct and air-conditioning ventilation duct wormlike cleaning robot |
| GB2501312B (en) * | 2012-04-20 | 2017-04-26 | Cokebusters Ltd | Improvements in or relating to pipeline pigs |
| CN105195475B (en) * | 2015-10-22 | 2017-07-11 | 西南石油大学 | De-plugging wiper is washed away in one kind rotation |
| CN105618442B (en) * | 2016-01-11 | 2017-07-21 | 西南石油大学 | A kind of wiper brake gear |
| CN206425309U (en) * | 2016-12-20 | 2017-08-22 | 鞍钢贝克吉利尼水处理有限公司 | Formula pipeline cleaning robot is washed in a kind of remote control rotation |
| US20190178433A1 (en) * | 2017-12-09 | 2019-06-13 | Oceaneering International, Inc. | Maintenance of drilling risers |
| CN210497522U (en) * | 2019-08-28 | 2020-05-12 | 西南石油大学 | Complex pipeline cleaning device |
| CN210614129U (en) * | 2019-09-05 | 2020-05-26 | 广东海洋大学 | Pipeline inner wall spraying robot of self-adaptation pipe diameter |
-
2021
- 2021-01-15 CN CN202110056534.6A patent/CN112893346B/en active Active
Patent Citations (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20100012571A (en) * | 2008-07-29 | 2010-02-08 | (주)아이비에스엔지니어링 | Remote controlled robot for cleaning the interior of duct |
| CN201427125Y (en) * | 2009-03-31 | 2010-03-24 | 王成军 | Pipe scale removal robot |
| CN203875077U (en) * | 2014-05-21 | 2014-10-15 | 中国石油大学(华东) | Ultrasonic and mechanical hybrid descaling device adaptive to variable pipeline diameter |
| CN106238415A (en) * | 2016-07-16 | 2016-12-21 | 张�浩 | A kind of petroleum pipeline inwall datatron with cleaning, drying function |
| CN106513390A (en) * | 2016-12-20 | 2017-03-22 | 鞍钢贝克吉利尼水处理有限公司 | Pipeline cleaning method and adopted remote control rotary cleaning type pipeline cleaning robot |
| CN107262467A (en) * | 2017-06-26 | 2017-10-20 | 长春理工大学 | Intelligent creeping robot device for pipeline cleaning |
| CN108772389A (en) * | 2018-05-10 | 2018-11-09 | 湖北文理学院 | A kind of pipeline cleaning machine people |
| CN209550164U (en) * | 2018-08-31 | 2019-10-29 | 深圳市红树林环保科技有限公司 | A kind of apparatus for eliminating sludge in pipe of Treated sewage reusing equipment |
| CN209255409U (en) * | 2018-10-17 | 2019-08-16 | 张军 | Oil field gathering and transportation pipeline apparatus for eliminating sludge |
| CN209124547U (en) * | 2018-10-23 | 2019-07-19 | 李静玮 | A kind of heating and ventilating pipeline scale remove device |
| CN209094096U (en) * | 2018-11-12 | 2019-07-12 | 牛斐 | A kind of oilfield chemical cleaning device used in oil pipe with scale |
| CN109465260A (en) * | 2018-12-12 | 2019-03-15 | 河海大学常州校区 | A kind of pipeline cleaning robot |
| CN109538163A (en) * | 2019-01-29 | 2019-03-29 | 吉林大学 | A kind of ultrasonic activation combined type well-washing device and pumping and washing process |
| CN110238139A (en) * | 2019-07-03 | 2019-09-17 | 苏州力佳达电子科技有限公司 | Pipe dredging underwater robot with ultrasonic wave addi-tional crusher |
| CN210253413U (en) * | 2019-07-16 | 2020-04-07 | 陕西中建建乐智能机器人有限公司 | Ultrasonic pipeline cleaning robot |
| CN110449421A (en) * | 2019-08-23 | 2019-11-15 | 安徽品冠管业有限公司 | Heating and ventilating pipeline scale remove device |
| CN110701429A (en) * | 2019-10-15 | 2020-01-17 | 西安石油大学 | Petroleum pipeline cleaning and detecting robot |
| CN111036626A (en) * | 2019-12-25 | 2020-04-21 | 西安石油大学 | Oil field gathering and transportation pipeline multi-occasion intelligent reducing and descaling device |
| CN212093587U (en) * | 2020-02-17 | 2020-12-08 | 马波 | Defeated pipeline scale removal device of collection |
| CN211965247U (en) * | 2020-03-17 | 2020-11-20 | 曹芳 | Novel municipal administration water supply and drainage pipeline clearance device |
| CN111589808A (en) * | 2020-05-27 | 2020-08-28 | 常州机电职业技术学院 | Oil pipeline inner wall scale removal device |
Also Published As
| Publication number | Publication date |
|---|---|
| CN112893346A (en) | 2021-06-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN112893346B (en) | In-pipe composite visual automatic descaling device and descaling method | |
| CN110440632B (en) | Power plant condenser scale removal cleaning equipment | |
| KR100927341B1 (en) | Descaling device of old pipe | |
| KR100656095B1 (en) | Washing apparatus to remove a scale being the inside of pipe using powerless revolution | |
| CN111589808A (en) | Oil pipeline inner wall scale removal device | |
| KR100863263B1 (en) | An apparatus and method for rehabilitating the superannuated pipe | |
| JP2687255B2 (en) | Tube cleaner | |
| KR101057153B1 (en) | A pipe cleaner | |
| CN109174855A (en) | A kind of Vehicular garbage dustbin automatic rinser | |
| KR101997651B1 (en) | Apparatus for removing deposit in sewer pipe | |
| US6581235B1 (en) | Apparatus for cleaning and removing deposits from internal walls of ducts for conveying fluids of any kind | |
| CN208527567U (en) | A kind of adaptive inner wall rust-removing and cleaning machine of aspect square hole special steel dimpling | |
| CN113145581B (en) | Variable-section pipeline descaling device | |
| CN117300850A (en) | Ship body rust removing device for ship manufacturing | |
| CN113649366A (en) | Special dredging device for cleaning pipeline and using method thereof | |
| CN110593395B (en) | Pipeline device of decontaminating for civil engineering | |
| WO1989012513A1 (en) | Apparatus for cleaning pipes | |
| CN211726821U (en) | Pipeline dredging device | |
| CN116623783A (en) | High-pressure pipeline dredging device and high-pressure pump | |
| CN116689357A (en) | Submarine cable overhauling attachment cleaner | |
| CN215391379U (en) | Bullet type self-rotating pipe cleaner | |
| CN117798149A (en) | Pipe cleaner | |
| CN113000511A (en) | Natural gas pipeline cleaning device and using method thereof | |
| CN209531624U (en) | Inner wall of the pipe cleaning device | |
| CN112845428A (en) | Natural gas line pigging device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |