CN112534304A - 用于自主地控制系统的感知系统 - Google Patents
用于自主地控制系统的感知系统 Download PDFInfo
- Publication number
- CN112534304A CN112534304A CN201980052040.1A CN201980052040A CN112534304A CN 112534304 A CN112534304 A CN 112534304A CN 201980052040 A CN201980052040 A CN 201980052040A CN 112534304 A CN112534304 A CN 112534304A
- Authority
- CN
- China
- Prior art keywords
- lidar sensor
- reflected
- environment
- phase
- reflection point
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




























Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/50—Systems of measurement based on relative movement of target
- G01S17/58—Velocity or trajectory determination systems; Sense-of-movement determination systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
- G01S17/32—Systems determining position data of a target for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
- G01S17/32—Systems determining position data of a target for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated
- G01S17/34—Systems determining position data of a target for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/42—Simultaneous measurement of distance and other co-ordinates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/89—Lidar systems specially adapted for specific applications for mapping or imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/93—Lidar systems specially adapted for specific applications for anti-collision purposes
- G01S17/931—Lidar systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/4802—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00 using analysis of echo signal for target characterisation; Target signature; Target cross-section
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/4808—Evaluating distance, position or velocity data
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4814—Constructional features, e.g. arrangements of optical elements of transmitters alone
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4818—Constructional features, e.g. arrangements of optical elements using optical fibres
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/484—Transmitters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/491—Details of non-pulse systems
- G01S7/4911—Transmitters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/491—Details of non-pulse systems
- G01S7/4912—Receivers
- G01S7/4915—Time delay measurement, e.g. operational details for pixel components; Phase measurement
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/491—Details of non-pulse systems
- G01S7/4912—Receivers
- G01S7/4917—Receivers superposing optical signals in a photodetector, e.g. optical heterodyne detection
Abstract
本文中描述了用于检测通过激光雷达测得的表面的距离、速率和特性的系统和方法。
Description
通过引用任何优先权申请的并入
在与本申请一起提交的申请数据表中对其认定外国或国内优先权声明的任何一个和所有的申请特此根据37 CFR 1.57通过引用并入。
本申请根据35 U.S.C§119(e)要求2018年6月29日提交的、标题为“PERCEPTIONSYSTEMS FOR USE IN AUTONOMOUSLY CONTROLIING SYSTEMS”的美国临时专利申请第62/692,417号和2019年5月21日提交的、标题为“SYSTEMS AND METHODS FOR MEASURINGCHARACTERISTICS OF AN OBJECT AT DISTANCE”的美国临时专利申请第62/850,933号的优先权,每篇申请的全部内容特此通过引用明确地并入本文。
技术领域
本公开的一个技术领域是感测系统,更具体地,是用于自主地控制系统的感知系统。
背景技术
自主系统需要它们的环境的一些感测来向系统提供信息和反馈。例如,对于自主车辆的许多设计使用光成像、检测和测距(“激光雷达”)来测量它们的周围环境、识别相邻的物体、并且确定所述物体的地点和速率。然而,目前的激光雷达装置具有一系列问题,包括低准确度、高成本、慢速和来自外部源的干扰。因此,改进的激光雷达装置不仅在自主系统领域中是可取的,而且在其他测量领域中也是可取的。
发明内容
本文中描述的技术为自主应用(诸如汽车的计算机辅助驾驶和其他的感测应用)提供综合感测解决方案。这些技术可以被应用于许多技术和系统中,包括,但不限于,个人和商业地面运输、航空电子设备、机器人学、工业制造、农业、采矿和测绘。所述系统可以由感测环境的一群、一组或一批探针(包括传感器或其他输入或感测装置)和解释数据的算法组成。
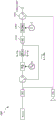
在用于汽车1的具有中央单元10和连接到中央单元10的多个探针20的感知系统的背景下,图1中描绘示例系统。探针20中的每个可以包括一个或多个传感器。该系统组合一组特征,包括,但不限于以下特征:
-多模态性。传感器群(有时被称为超传感器)中包括的传感器中的一些传感器或所有的传感器包含互相补充和增强的多种感测模态,所述多种感测模态可以包括,但不限于:激光雷达、雷达、相机、陀螺仪、运动学和非运动学位置传感器、运动学和非运动学速率传感器、全球定位系统(GPS)和超声传感器。
-并发的。不同的感测模态可以在硬件层面和软件层面这两个层面上被深度地集成到单个超传感器中。在一些实施例中,一个或多个超传感器中的每个使用文中描述的技术的并发感测可以取代多模态融合(其可能否则需要组合或同时使用从多个不同的传感器获得的数据)来提高检测置信度(例如,所述系统正在检测正被传感器感测的环境中的物体的系统置信度)和测量技巧。
-智能的。在一些实施例中,传感器根据场景智能地分配它们的资源。例如,更重要的区域(诸如行进方向上的那些区域)可以在资源分配中被优先处理。在一些实施例中,预处理算法解释所述数据,并且飞速地优化传感器的配置。
-灵活的。在一些实施例中,为了更好的灵活性和可靠性,探测和感测在物理上是分离的。
-集中式的。在一些实施例中,整个传感器群的子集作为单个系统操作。来自一些或所有的探针和感测模态的信号可以汇聚成环境的单个表示,该表示然后被用于感知环境中的物体。
-感知的。在一些实施例中,高级语义伴随用于解释环境的原始3D地图。专用的计算引擎可以通过感知算法(诸如聚类、分类和跟踪)来处理数据。
-开放的。在一些实施例中,感知系统可以允许多个不同的算法在其上运行,诸如本文中和其他地方讨论的那些算法。
图2描绘示例系统的框图。如所示,中央单元10可以与探针20进行通信,探针20可能具有各种不同的传感器。中央单元10可以包括可以从探针20接收光学信号或电子信号并且提供这些信号的初始处理的光学器件/电子组件。所述光学器件/电子组件还可以控制传感器,诸如通过提供以特定的方式或者在特定的区域中测量、或者可替换地提供必要的输入(诸如输入到光学传感器的光束或输入到电气致动器的功率)的指令。中央单元10可以另外还包括将来自传感器的信号变换为数字形式、并且将数字指令变换为驱动探针20处的各种组件的模拟输入的模拟/数字转换器。所述模拟/数字转换器可以与感测引擎进行通信,所述感测引擎可以产生从探针20接收的数据的3D地图和其他表示。感测引擎还可以用于探针20的数字指令,这些数字指令然后可以被转换器转换为模拟形式。中央单元10可以另外还包括可以提供探针20提供的数据的更高级的分析的感知引擎。例如,感知引擎可以使用感测引擎产生的3D地图和图像来识别道路上的其他汽车、车道标志、行人和其他特征。这些有意义的语义然后可以被提供给其他组件,诸如自主车辆上的单独的路线规划系统。
如以上所指出的,感知系统可以包括激光雷达传感器100。图3中描绘激光雷达子系统(包括激光雷达传感器)的框图。如所示,激光雷达传感器可以包括被配置为输出光束的激光器。所述激光器可以是,但不限于,激光二极管、量子级联激光器、光纤激光器或分布式反馈激光器。所述激光器可以被连接或者以其他方式与单模纤维、多模纤维、锥形多模纤维束、光子晶体纤维、单模纤维束和光子灯笼复用器的形式的光纤进行光学通信。纤维的光学耦合输入和输出就单纤维输出来说可以包括准直仪,就纤维束或光子灯笼来说,可以包括微透镜阵列。此外,可以使用电机或电光技术来使从激光雷达传感器发射的射束转向。具有一个或两个旋转轴并且可由马达或其他装置控制的可旋转镜可以可选地被使用。可旋转多面镜还可以可选地被用于同时2轴射束光栅扫描。使用这些纤维、纤维耦合器(包括介质镜、纤维耦合器立方体、光纤耦合器和涂布金属的镜)、波导和/或其他光学元件(诸如镜和透镜),来自单个激光器的光束可以可选地被转向到图1中描绘的多个探针,并且类似地,由该光束导致的并且被反射到这些探针的反射射束可以可选地被按路线返回到同一中央单元10进行处理。因此,如所示,中央单元10可以包括与各种探针20通信的多个收发器。更进一步,多个探针20可以可选地连接到单个收发器,从而使得可以探测从不同时刻、空间中的不同方向、还有从多个探针同时收集的复用信号。
各种不同的激光雷达系统可以与上述系统一起使用。例如,激光雷达传感器可以包括光学传感器、激光器、至少一个相位调制器和处理器。光学传感器可以被配置为至少基于接收到一个或多个光束生成信号。激光器可以被配置为发射初始光束,该光的第一部分被引导到环境中,内部部分被引导到光学传感器。光学传感器可以被配置为既接收内部部分,又接收由于初始光束的第一部分在环境中的第一反射点处被反射而导致的第一反射光束。相位调制器可以被配置为在一段时间段内利用唯一代码对初始光束的第一部分的相位进行调制,以在初始光束的第一部分被引导到环境中之前,将所述唯一代码嵌入到初始光束的第一部分的调制的相位中。处理器可以被配置为从光学传感器接收信号、并且至少基于检测到所述唯一代码、识别已经由初始光束的第一部分导致的第一反射光束。处理器可以被进一步配置为至少基于第一反射光束和初始光束的内部部分来确定到第一反射点的距离。
在进一步的实施例中,激光雷达传感器可以包括光学传感器、激光器和处理器。光学传感器可以被配置为至少基于接收到一个或多个光束生成信号。激光器可以被配置为发射初始光束,所述初始光束的第一部分在第一方向上被引导到环境中,所述初始光束的第二部分在不同于第一方向的第二方向上被引导到环境中,所述初始光束的内部部分被引导到光学传感器。光学传感器可以被配置为接收以下部分中的每个:初始光束的内部部分、由于初始光束的第一部分在环境中的第一反射点处被反射而导致的第一反射光束、以及由于初始光束的第二部分在环境中的第二反射点处被反射而导致的第二反射光束。处理器可以被配置为从光学传感器接收信号、并且识别已经由初始光束的第一部分导致的第一反射光束、已经由初始光束的第二部分导致的第二反射光束。处理器可以被进一步配置为至少基于第一反射光束和第二反射光束、以及初始光束的内部部分来确定到第一反射点和第二反射点的距离。初始光束的第一部分到环境中的引导和光学传感器接收第一反射光束之间的时间与初始光束的第二部分到环境中的引导和同一光学传感器接收第二反射光束之间的时间重叠。
在进一步的实施例中,一种激光雷达传感器可以包括光学传感器、激光器和处理器。光学传感器可以被配置为至少基于接收到一个或多个光束生成信号。激光器可以被配置为发射初始光束,初始光束的第一部分被引导到环境中,初始光束的内部部分被引导到光学传感器。光学传感器可以被配置为既接收初始光束的内部部分,又接收由于初始光束的第一部分在环境中的第一反射点处被反射而导致的第一反射光束。处理器可以被配置为从光学传感器接收信号、并且基于所述信号识别已经由初始光束的第一部分导致的第一反射光束。处理器还可以被配置为至少基于第一反射光束和初始光束的内部部分来确定到反射点的距离。更进一步,处理器可以被配置为至少基于第一反射光束和初始光束的内部部分之间的光场的相位差的时间导数来确定反射点相对于激光雷达传感器的径向速率。更进一步,激光雷达传感器可以被配置为至少基于第一反射光束的多普勒频移和确定的径向速率来确定反射点相对于激光雷达传感器的横向速率。
在进一步的实施例中,一种激光雷达传感器可以包括激光器、第一纤维耦合器、光学合成器单元、发送器、接收器、第二纤维耦合器和光学传感器。激光器可以被配置为发射初始光束,第一纤维耦合器可以与激光器进行光学通信,以接收初始光束,并且将初始光束划分为发送部分和内部部分。光学合成器电路可以与第一纤维耦合器进行光学通信,以从第一纤维耦合器接收初始光束的发送部分,并且调整初始光束的发送部分的相位。发送器可以与光学合成器电路进行光学通信,以从光学合成器电路接收具有调整的相位的发送部分,并且将发送部分引导到环境中。接收器可以被配置为从环境接收由初始光束的发送部分导致的反射光束。第二纤维耦合器可以与接收器和第一纤维耦合器进行光学通信,以将反射光束和初始光束的内部部分组合为组合光束。光学传感器可以与第二纤维耦合器进行光学通信,以接收第二光束。
在进一步的实施例中,可以提供一种测量距离的方法。可以将光束划分为发送部分和内部部分。可以在一段时间段内对发送部分的相位进行调制,以将唯一的时间相关的代码嵌入到发送部分中。然后可以将具有调制的相位的发送部分引导到环境中,并且可以接收由于发送部分被引导到环境中而导致的反射射束。可以至少通过检测所述唯一代码来识别反射射束是由于发送部分被引导到环境中而导致的。然后可以使用反射射束和内部部分来估计到反射点的距离。
在进一步的实施例中,可以提供一种同时测量多个距离的方法。可以将光束划分为第一发送部分、第二发送部分和内部部分。可以在不同的方向上将第一发送部分和第二发送部分引导到环境中。然后可以在单个光学传感器处接收由于第一发送部分和第二发送部分被引导到环境中而导致的反射射束。可以识别反射射束是由于第一发送部分和第二发送部分被引导到环境中而导致的,并且可以使用反射射束和内部部分来估计到反射点的距离。第一发送部分到环境中的引导和接收由第一发送部分导致的反射射束之间的时间可以与第二发送部分到环境中的引导和接收由第二发送部分导致的反射射束之间的时间重叠。
在进一步的实施例中,可以提供一种操作激光雷达传感器测量到物体的距离和所述物体的速率的方法。可以将光束划分为发送部分和内部部分,并且可以将发送部分引导到环境中。可以接收由于发送部分被引导到环境中而导致的反射射束。可以使用反射射束和内部部分来估计到反射点的距离。另外,可以至少基于反射光束和内部部分之间的光场的相位差的时间导数来估计反射点相对于激光雷达传感器的径向速率。此外,可以至少基于反射射束的多普勒频移和确定的径向速率来估计反射点相对于激光雷达传感器的横向速率。
在进一步的实施例中,一种激光雷达传感器可以包括光学传感器、激光器和处理器。光学传感器可以被配置为至少基于接收到一个或多个光束生成信号。激光器可以被配置为发射初始光束,所述初始光束的第一部分被引导到环境中,所述初始光束的内部部分被引导到光学传感器。光学传感器还可以被配置为既接收初始光束的内部部分,又接收由于初始光束的第一部分在环境中的反射点处被反射而导致的反射光束。处理器可以被配置为从光学传感器接收信号、并且识别已经由初始光束的第一部分导致的反射光束。处理器可以被进一步配置为:至少基于反射光束和初始光束的内部部分来确定到反射点的距离;确定反射点相对于激光雷达传感器的径向速率;并且至少基于反射射束的旁瓣宽度来确定反射点相对于激光雷达传感器的横向速率。
在进一步的实施例中,提供了一种操作激光雷达传感器测量到物体的距离和所述物体的速率的方法。可以将光束划分为发送部分和内部部分。可以将发送部分引导到环境中。可以接收由于发送部分被引导到环境中而导致的反射射束。然后可以确定以下特征:使用反射射束和内部部分来确定到反射点的距离;确定反射点相对于激光雷达传感器的径向速率;至少基于反射射束的旁瓣宽度来确定反射点相对于激光雷达传感器的横向速率。
在进一步的实施例中,一种激光雷达传感器可以包括光学传感器、激光器和处理器。光学传感器可以被配置为至少基于接收到一个或多个光束生成信号。激光器可以被配置为发射初始光束,所述初始光束的第一部分被引导到环境中,所述初始光束的内部部分被引导到光学传感器。光学传感器可以被配置为既接收初始光束的内部部分,又接收由于初始光束的第一部分在环境中的第一反射点处被反射而导致的反射光束。处理器可以被配置为从光学传感器接收信号、并且识别已经由初始光束的第一部分导致的反射光束。处理器可以被进一步配置为:至少基于反射光束和初始光束的内部部分来确定到反射点的距离,并且至少基于反射光束的光谱分析来确定反射点处的物体的表面的一个或多个特性。
在进一步的实施例中,可以提供一种操作激光雷达传感器测量到物体的距离和所述物体的速率的方法。可以将光束划分为发送部分和内部部分。可以将发送部分引导到环境中。可以接收到由于发送部分被引导到环境中而导致的反射射束。然后可以确定以下特征:使用反射射束和内部部分来估计到反射点的距离;确定反射点相对于激光雷达传感器的径向速率;并且至少基于反射射束的光谱分析来确定反射点处的表面的一个或多个特性。
附图说明
从结合示出说明性实施例的附图进行的以下详细描述,本公开的进一步的目的、特征和优点将变得显而易见,在附图中:
图1是实施例感知系统的系统图。
图2是实施例感知系统的框图。
图3是实施例激光雷达系统的框图。
图4A描绘使用直接检测的激光雷达系统。
图4B描绘使用相干检测的激光雷达系统。
图5A-5H描绘使用相干检测和超外差技术的各种激光雷达系统。
图6A-6C描绘使用相干检测和超外差技术的各种激光雷达系统。
图7A和7B描绘可以被嵌入到光束的相位中的代码。
图8描绘计算机系统。
图9描绘用于使用激光雷达传感器估计距离的方法。
图10描绘用于同时检测多个距离的方法。
图11描绘用于测量距离、径向速率和横向速率的方法。
图12A-12C描绘目标毛巾上的不同横向速率的功率谱。
图13描绘检测横向速率的计算机产生的光谱。
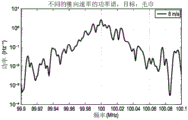
图14A-14D描绘横向速率为每秒50米时、不同的目标材料的功率谱。
具体实施方式
图4A和4B描绘使用直接检测和相干检测的激光雷达系统。激光雷达通过主动地照射环境并且测量被任何遇到的表面反射的光的强度来检测物体。感测技术分成两个主阵营:直接的和相干的(有时被称为“间接的”)。直接检测技术(在图4A中描绘)可以直接利用光学传感器(诸如光电二极管、光电接收器或光电检测器)测量反射光的强度。相干检测技术(在图4B中描绘)可以使用间接方法:将接收的光与光学传感器上的发送光的一部分混合在一起,并且利用光学传感器测量它们之间的干涉。
在一些实施例中,相干检测提供以下优于直接检测的优点:
-无噪声信号放大。直接检测和相干检测通常以非常不同的方式对背景和电子噪声做出响应。在直接检测中,放大信号通常还放大噪声,而不改进信噪比(SNR)。相反,相干检测通常能够只放大信号并且改进SNR。
-动态范围。直接检测和相干检测的不同之处还在于它们的动态范围。在直接检测中,信号通常与接收的光的强度成正比,并且随着物体的平方距离的倒数降低。在相干检测中,信号通常与接收的强度的振幅成正比,并且只随着物体的距离的倒数降低。
不同于基于频率调制的一些相干检测技术,本文中描述的一些激光雷达系统通过测量反射光的相位来检测物体的范围。它们可能通过解决使相干检测方法不适用的一个或多个关键的问题来这样做:1)将光的相位映射到距离中的内在歧义;2)从粗糙表面反射时的光的相位的不稳定性;3)被移动物体反射的光的频率的多普勒频移;4)接收器的窄接受角度;5)来自不同方向的信号的内在不可区分性;6)由于噪声而导致的激光器的相位波动。
(1)相位模糊。发送的波和接收的波(具有波长λ)之间的相对相位 与到物体的往返距离2L成正比:
与到物体的往返距离2L成正比:

原则上,L可以通过测量 并且使该关系翻转而获得。然而,当光行进通过等于其波长(例如,大约一毫米)的距离时,相位增大360°。此后,它回到零,以使得:
并且使该关系翻转而获得。然而,当光行进通过等于其波长(例如,大约一毫米)的距离时,相位增大360°。此后,它回到零,以使得:

光的相位有效地仅具有行进的距离的“短时记忆”,并且它独自不能被用于测量长于光的波长的距离。
(2)相位不稳定性。如果物体在照射光下即使略微移动,则被粗糙表面反射的光的相位也突然改变。这使得相位测量在许多情况下不实用。
(3)多普勒不确定性。物体的速率(v)使反射光的频率(f)根据它是正离开、还是靠近接收器而增大或减小:

因为频移是未知的,并且当激光雷达看向空间中的不同点时,可以突然改变,所以找到信号并且跟踪其相位是具有挑战性的。
(4)缓慢扫描。为了使发送的光和接收的光之间的干涉产生大的信号,这两个波需要在光学传感器上足够好地重叠。在一些相干系统中,该要求可以显著地限制接收器的有效视场,因此,射束扫描速度。
(5)方向模糊。一些相干激光雷达不能区分从多个方向同时进入光学传感器的信号。由于某个原因,视场中的其他的激光雷达可以产生干涉。
(6)激光器相位噪声。在干涉测距中,发送的光的相位有效地是用作测量其他距离的参考的长度。激光器频率/相位或传播通过发送器的机械振动的内在不稳定性可以显著地影响降雨准确度/精度。
对于可以解决这些问题中的一些或全部的激光雷达系统,存在许多可能的方法和/或架构。图5A-5H描绘使用超外差相干检测方法测量RF拍音的激光雷达传感器系统(但是RF之外的频率范围也是可能的)。在一些实施例中,所述技术测量两个一致的和/或空间上/时间上相干的激光射束之间的相位。比如相位模糊、相位不稳定性和多普勒不确定性的因素可以相同程度地影响两个射束,并且在差分测量中抵消。为了这样做,射束需要是可分离的,但是被精确地重叠。本文中对这进行更详细的讨论。
图5A描绘包括激光器110的激光雷达系统100。如上所述,激光器110可以可选地是中央单元10的一部分。如以上进一步讨论的,激光器110可以与图5A中描绘的其他组件分离。更进一步,激光器110可以可选地在多个激光雷达传感器之间共享,以使得一个激光器110可能同时向如图3所示的多个激光雷达传感器布置提供光束(在图3中,图5A中的其余的组件可以分别提供给每个收发器)。一个或多个纤维耦合器可以用于将光束从单个激光器传播到多个子系统。然而,在其他实施例中,如图5A中描绘的组件的布置所暗示的,每个激光雷达传感器100可以包括专用的激光器110。
来自图5A中的激光器110的初始光束可以(例如,利用一个或多个纤维耦合器170)被划分为三个单独的部分。射束的第一部分可以(例如,利用光纤)被引导到第一移频器140。第一移频器140可以例如是基于波克尔斯(Pockels)效应的电光移频器或声光移频器。如所示,第一移频器140可以将射束的第一部分的频率从频率f0调整或调制到另一个频率f0+f1。尽管频率被描绘为被调整得更高,但是频率也可以被调整地更低。更一般地说,频率可以被调整为各种不同的频率,可选地在零和10GHz之间。
第一部分然后可以被引导到第一相位调制器150。第一相位调制器150可以是,但不限于,铌酸锂晶体或波导。第一相位调制器150可以被配置为在一段时间段内将代码c1嵌入在第一光束的相位中。如所示,所述代码可以基本上是二进制的或四进制的,比如条形码。例如,所述代码可以在一段时间段内零度相位、然后到一段时间段内180度相位之间移位,在变化的持续时间内重复该模式以产生所述代码。更进一步,所述代码可以可选地是随机的或伪随机的,并且具有足以被认为是唯一的长度。图7A中描绘示例代码。然而,其他变化是可能的。例如,相位可以可选地移位90度、45度或30度。此外,相位可以是非二进制的,包括多于两个可能的相位。
如图5A中描绘的,来自激光器110的光束的第二部分可以被以与第一部分类似的方式操纵。如所示,第二部分可以在不同于第一部分的光路上被引导,并且可以被第二移频器141和第二相位调制器151调整,第二移频器141将第二部分调整到可以可选地不同于第一频率的频率f0+f2,第二相位调制器151可以可选地被配置为将类似的、但是不同的代码c2提供给第二部分,以使得所述两个代码基本上彼此正交。第一部分和第二部分然后可以被纤维耦合器171组合,然后被联合地引导到发送器120。以这种方式,可以产生具有频率f1-f2和相位调制的代码c1c2的组合射束(对于这些目的,具有频率f1+f2的单独的分量可以被忽略)。在一些实施例中,频率f1-f2可以在0到10GHz之间。该组合射束由光学合成器电路115产生,光学合成器电路115可以在发送到环境中之前调整光的部分的频率和相位。光学合成器电路115可以可选地包括除了移频器140、141和相位调制器150、151之外的组件,诸如准直仪、发光镜、透镜、纤维耦合器、延迟线、以及可以准备用于发送的射束的其他的光学组件。此外,尽管在图5A中,第一纤维耦合器170没有被描绘为光学合成器电路115的一部分,但是它可以可选地被认为是光学合成器电路115的一部分。例如,在图5B中的激光雷达传感器的另一个例子中,图5A中的纤维耦合器170A的功能被划分到两个纤维耦合器170B和171B中,其中只有一个是光学合成器电路115的一部分。
组合射束然后可以被发送器120引导到环境中。发送器120可以可选地包括各种光学组件,诸如一个或多个透镜、镜、准直仪或其他装置。此外,发送器120可以还可选地包括可调整的组件,以使得光束的第一部分和第二部分可以在可控的方向上被引导。例如,发送器120可以可选地具有至少180度、90度或45度的角度范围。
被引导到环境中的组合射束可以遇到物体,从而导致由第一部分和第二部分导致的反射射束。该反射射束然后可以被接收器130接收,并且可以被引导到光学传感器180。光学传感器还可以从激光器110接收初始光束的内部部分。因此,光学传感器180可能从反射射束的特性、以及反射射束和初始射束的内部部分之间的干涉的特性得到信息。光学传感器180然后可以产生指示接收的射束的信号,并且可以将该信号提供给计算机系统300(在图8中描绘),可能通过图2中描绘的系统提供,以用于进一步的分析。这样的分析可以包括诸如识别反射射束中的代码c1和c2以识别所述射束的发送时间的步骤。没有所述代码的组合射束的表示还可以通过在适当的解码(诸如移除代码c1和c2)之后、利用本地振荡器测量并且减去反射射束中的每个的拍音的相位而被电子地(数字地或模拟地)合成。组合射束还可以通过对光学传感器180处的信号取平方而被合成,从而抵消由反射点处的移动物体引起的可能的多普勒频移。此外,将接收的反射射束的相位与被投射的射束进行比较可以用于确定(然后取消)由激光器180中的不稳定性、机械振动和其他影响引起的噪声。
该系统的进一步的变化也是可能的。例如,在一些实施例中,发送器120和接收器130可以被组合为具有共享的透镜、镜或其他组件的收发器。另外,像激光器110那样,光学传感器180也可以是中央单元10的一部分,与图5A中描绘的其他组件(诸如光学合成器电路115)分离,或者在多个激光雷达传感器之间共享。更进一步,光学合成器电路115的部分可以在多个激光雷达传感器之间共享,诸如通过使用单个移频器140/141产生可以用于多个激光雷达传感器的移位的频率来共享。
代码c1和c2的使用可以促进在多个激光雷达传感器100A之间共享的单个光学传感器180处可以收集的各种其他的组合射束(具有不同的代码)之间识别组合射束。因此,例如,激光雷达传感器可以具有两组组件(诸如两个光学合成器电路115、移频器140、相位调制器150、发送器120和/或接收器130),每组组件使用引导单独的组合射束(其可以是来自激光器110的同一初始射束的部分)来同时测量不同方向上的距离(以使得对于每组组件、发送到环境中和接收反射射束的时间可以重叠)。还应注意到,所述代码还可以促进与其他装置(诸如也可能包括激光雷达传感器的相邻的汽车)可能发射的射束完全不同的、来源于激光雷达传感器100的反射射束的识别,以使得激光雷达传感器100可以在存在大量其他的激光雷达传感器时操作。
反射射束可以用于测量与反射点处的物体相关的各种特征。例如,反射射束可以相对于发送的合成射束的相位φt使用接收的合成射束的相位φr(与合成射束的波长Λ一起)来指示到反射点的距离L:

可以通过在射束被引导到环境中之前测量射束的相位来估计发送的合成射束的相位φr。例如,发送器120可以创建也可以被光学传感器180接收以用于测量的反射。可替换地,射束的一部分可以在到达发送器120之前,在更上游测量。
该分析可选地可以在没有代码的射束的电子表示已经被产生之后进行。可以通过选择导致合成波长的足够接近的频移f1和f2(使用光速c)来使得模糊范围(由于相位的重复而导致)任意大:

例如,对于小于1MHz的f1-f2,波长可以大于300m。然而,在一些情况下,不能容易地使频移小得足以得到足够大的波长。尽管如此,可以通过测量传播的代码从发送到接收的延迟来解决由相位差导致的模糊,所述延迟可以指示射束的飞行时间,因此当与光速相比时,指示距离。该代码延迟可以提供范围的粗略测量,相位差可以提供距离的最后小部分的精细测量。组合的、粗略的和精细的测量可以提供距离的准确的和无歧义的测量。例如,激光雷达传感器100可以具有1mm或更好的准确度。此外,激光雷达传感器100在10米、50米、100米、200米或500米的范围处,可以测量到该准确度。
反射射束还可以用于测量反射点的速率(例如,当所述点在物体上时,物体的速率)。可以通过使用距离的时间导数来确定从激光雷达传感器100的径向方向上的点的速率:

可以使用嵌入在射束中的代码来促进该测量,这使得可以连续地测量,不同于依赖于离散脉冲的其他技术。
与激光雷达传感器100的视线相切的横向方向上的点的速率也可以被确定。例如,可以从反射射束测量指示被乘以波长λ时的总速率的多普勒频移。该多普勒频移不仅可以包括反射射束光谱的中心的移位,而且还可以包括下面进一步讨论的旁瓣频移。然后可以减去径向速率以确定横向速率:
v⊥=λfDoppler-v||
图13描绘使用本文中描绘的激光雷达传感器的分析模型的、反射射束的计算机产生的信号光谱,其中反射点在10米的距离处,并且以50.8m/s的横向速率移动。如所示,光谱基本上遵循[sinc(αx)]2函数,该函数中的峰和谷限定表示特性的旁瓣。旁瓣在光谱的中心峰的任一侧,可以以大约5kHz的频率fs重复(因此具有频宽fs)。反射点处的与正被反射的射束相互作用的材料的表面上的特征可以在反射射束中创建这些旁瓣。光谱的中心峰在存在信号噪声时还可以与这些旁瓣一起混合,从而基本上使中心峰变宽。因此,如果在适当的地点测量多普勒频率,则它可以指示如以上指示的径向速率和横向速率之和。然而,旁瓣宽度还可以用于以其他方式确定横向速率。
频率间隔fs可以与反射点相对于激光雷达传感器的横向速率vp除以反射点处的激光束的直径D成比例:

其中k≈1是通过实验校准确定的经验常数。
可以通过以下公式从到反射点的距离来推导反射点处的激光束的直径:

其中D0是激光束束腰直径,zR是所谓的瑞利(Rayleigh)范围,L是到反射点的距离。
反射点的速率于是可以是物体或材料的横向速率v⊥加上由激光雷达传感器本身的旋转引起的反射点的速率vl之和,以使得可以使用以下公式来确定横向速率:

因此,可以使用由这些旁瓣成形的反射信号的光谱的构造来确定物体的横向速率。到反射点的距离可以使用本文中描述的技术来确定,或者不然是已知的。关于更特定的例子,可以使用图11中所示的方法,在该方法中,估计的距离另外还被用于估计横向速率。此外,使用旁瓣频率的横向速率的检测可以可选地与本文中描述的其他技术(诸如编码射束)组合使用。尽管横向速率也可以不使用编码射束测量,但是编码射束可以促进横向速率的测量。例如,编码射束可以帮助使反射射束与由环境中的其他光源引起的背景辐射隔离,所述背景辐射可能引入可以阻碍反射射束的光谱中的旁瓣的识别的过大的噪声。
图12A-12C描绘在不同的横向速率每秒0米、4米和8米时、按频率与用于样本材料的棉毛巾相比的反射射束的实际的功率谱。这些测量是使用分别以0Hz、100Hz和200Hz的速率并且在离毛巾6米的距离处(分别引入每秒0米、4米和8米的基本相对横向速率(如所指示的))光栅扫描目标的表面来进行的。此外,该数据是使用编码射束和本文中描述的相关技术产生的。如所示,每个光谱包括100MHz处的中心峰,该峰可以可选地对应于如上所述的合成射束,或者可以可替换地对应于发射射束的频率。光谱另外还包括在中心峰的任一侧的具有相隔间隔fs的峰和谷的旁瓣。这些旁瓣可以由反射点处的材料的表面上的特征引起。如在图12C中具体可以看到的,这样的特征还可以使中心峰与附近的旁瓣混合。
然而,由于数据中的噪声,旁瓣可能难以在图12A-12C中所示的数据中识别。应理解图12A中的到中心峰侧的特征不是由横向速率引起的旁瓣,因为该数据是在零速率时产生的。相反,那些带是数据中的噪声、计算机处理和其他影响的结果。尽管如此,即使旁瓣宽度不能被容易地或直接识别,其影响也可以在光谱中的中心峰的扩展宽度中被看到,这通过比较图12A-12C可以清楚地看到。因此,旁瓣宽度用于测量横向速率的使用可以要么来自于旁瓣宽度的直接测量、中心峰的宽度的测量、或者光谱的类似分析。
可以使用各种技术来识别旁瓣、因此频宽fs。例如,在一些实施例中,可以使用最佳拟合算法来使理想化的光谱与反射射束的光谱匹配。然后可以调整理想化的光谱的各种方面(诸如旁瓣频率、宽度、旁瓣振幅、中心峰振幅和其他特性)来最小化两个光谱之间的差异(例如,使用最小二乘法)。然后可以使用理想化的光谱中的所得的旁瓣地点来确定横向速率。其他的最佳拟合技术也可以被使用。
类似地,可以开发机器学习算法来从反射射束的光谱确定旁瓣宽度。可以产生具有已知的旁瓣宽度(或者可替换地,已知的横向速率)的样品光谱的数据集,并且使用该数据集来开发针对使用这些技术的算法。
反射射束还可以用于测量反射点处的物体的反射率。反射射束的振幅可以使用例如查找表来指示与可比距离处的实验结果相比时的物体的反射率。
反射射束的功率谱的进一步的分析可以指示反射点处的表面的附加特性。图14A-14D描绘横向速率为每秒50米时、各种材料的功率谱。如以上所讨论的,旁瓣可以由反射点处的表面上的特征引起,并且旁瓣的形式可以受表面上的那些特征影响。例如,旁瓣可以包括在图13的信号光谱中可以看到的附加边带,这些边带示出[sinc(αx)]2函数的旁瓣内的周期性特征。这些边带的振幅一般与表面特征的深度成比例。因此,例如,具有坑的材料将具有振幅随着坑的深度增大而变大的边带。此外,因为边带的振幅可以加到旁瓣的振幅,所以旁瓣的振幅也可以与反射表面的深度轮廓成比例。因此,旁瓣用于确定关于材料的信息的使用可以隐含地包括边带的使用。除了仅仅横向速率或表面特征的深度之外,关于反射点处的材料的附加信息还可以从反射射束的光谱分析确定。材料的特征确定光谱的形状,每种材料可以具有不同的特征。例如,材料上的重复图案可以在反射射束的光谱中引起重复图案。材料上的不规则的轮廓可以引起更复杂的光谱,但是仍可能包括材料特有的某些明显特征,诸如多模峰、斜率的变化和其他特征。
应注意到,这些光谱分析不同于可以检测物体的“颜色”或物体的某个其他的化学性质的光谱分析。光谱分析可以基于固定的波长,而不是基于波长对于反射的依赖性的颜色分析。类似地,光谱分析可以在规范化的光谱上进行(例如,如图14A-14D所示,任意地以0kHz为中心)。然而,在一些实施例中,诸如物体的“颜色”的附加信息也可以被使用。
作为例子,涂漆的干墙材料(其产生的光谱在图14A中示出)相对于棉毛巾(整个产生的光谱在图14B中示出)或毛织物(图14D中)具有相对平滑的表面。结果,棉毛巾和毛织物的边带振幅具有更高的振幅,因此,附加特征在光谱中更突出。可以以与以上关于旁瓣宽度讨论的那些方式类似的方式,使用最佳拟合或机器学习算法来确定边带振幅和其他特征,以确定材料的特性或材料的身份。
更进一步,可以开发使用反射射束的光谱中的图案来识别材料的算法。例如,可以使用来自各种材料的数据来训练机器学习算法以基于光谱识别材料。包括、但不限于边带的频率间隔和振幅的特征可以可选地被使用。如通过引用全部并入本文的“FourierTransform Infrared Spectroscopy”,Peter R.Griffiths,James A.de Haseth,JohnWiley&Sons,2007年,第二版中所讨论的,与用于化学分析的标准的傅里叶变换红外线(FTIR)光谱学中利用的那些技术类似的技术可以可选地被改造用于该背景中。
与横向速率一样,所述表面的特性还可以可选地与本文中描述的其他技术(诸如编码射束)组合使用。很像横向速率,表面特性也可以不使用编码射束测量,但是编码射束对于使反射射束与背景辐射隔离是有帮助的。再次,可以使用与图11中的方法类似的方法,在该方法中,可以包括估计表面的特性的附加步骤,可能使用从射束估计的其他信息来估计。
如图5B-5H中举例示出的,激光雷达传感器100的设计上的进一步的变化也是可能的,图5B-5H可以类似于图5A中的实施例,除非有相反的指示,具有指示类似组件的类似名称和标号。例如,如图5B所示,激光雷达传感器100B可以只包括一个移频器140B(例如声光调制器“AOM”,但是其他移频器也是可能的)和一个相位调制器(被描绘为电光调制器“EOM”,但是其他相位调制器也是可能的,包括,但不限于,双并行Mach-Zehnder干涉仪)150B来调整初始光束的第一部分的频率并且将代码应用于激光器110B发射的初始光束的第一部分和第二部分中的每个。该初始光束可以遇到第一纤维耦合器170B,第一纤维耦合器170B可以将射束的内部部分朝向光学传感器160B引导,并且将其余的射束引导到光学合成器电路115B。光学合成器电路115B可以包括第二纤维耦合器171B,第二纤维耦合器171B划分射束的第一部分和第二部分用于发送。第一部分可以以与图5A中的方式基本上相同的方式,直接前进到移频器140B,然后前进到相位调制器150B,然后前进到发送器120B。不同于图5A,图5B中的实施例可以包括第一光学循环器190B、第二光学循环器191B和第三光学循环器192B,第一光学循环器190B在移频器140B和相位调制器150B之间,第二光学循环器191B在相位调制器和第三纤维耦合器172B之间,第三光学循环器192B在第三纤维耦合器172B和发送器120B之间。然而,第二部分可以从第二纤维耦合器171B引导到第二光学循环器191B,以使得它然后可以与第一部分相反地通过相位调制器150B。第二部分然后可以被第一光学循环器190B引导到可选的延迟线200B,然后被引导到第三纤维耦合器172B(在第三纤维耦合器172B中,它可以被与第一部分组合,耦合器用作组合器)以如图5A中那样与第一射束部分一起发送。
相位调制器150B提供的代码可以是唯一的,诸如具有如上所述的伪随机代码(但是来自扩展频谱理论的不同类型的代码可以被使用)。该代码可以是足够随机的,以使得延迟线200B提供的延迟可以足够地使应用于光束的第一部分和第二部分的代码移位以使所述两个代码可以基本上正交。因此,来自激光雷达传感器100B的信号的处理与来自图5A的激光雷达传感器100的信号的处理可以是基本上相同的,除了f2为零之外。尽管如此,f1可以可选地被以类似的方式调整以如以上关于图5A讨论的那样实现测量的距离的期望的模糊范围。
图5B还描绘了发送器120B和接收器130B被组合为单个收发器的实施例,其中第三光学循环器192B将来自收发器120B/130B的反射射束引导到第四纤维耦合器193B。第四纤维耦合器193B组合反射射束和初始射束的内部部分,并且将它们引导到光学传感器160B。
图5C描绘与图5A和5B的两个激光雷达传感器100A、100B类似的实施例激光雷达传感器100C。如所示,如图5A中那样,光学合成器电路115C可以包括用于初始光束的第一部分和第二部分中的每个的单独的且独立的路径。然而,如图5B中那样,只包括一个移频器140C,以使得所述两个部分中只有一个使其频率移位。
图5D描绘与图5A中的激光雷达传感器100A基本上类似的、具有一些小的差异的实施例激光雷达传感器100D。例如,收发器120D/130D可以取代图5A中的单独的组件。
图5E描绘与图5D中的激光雷达传感器100D基本上类似的、但是只包括一个移频器140E的实施例激光雷达传感器100E。如所示,光学合成器电路115E可以包括在移频器140E和第一相位调制器150E之间的部分反射镜210E,以使得初始射束的第一部分可以如图5A-5D中那样通过这两个组件。初始射束的第二部分可以与第一部分分离,在这里通过线内部分回射器210E(其用作线内纤维耦合器)处的、而不是如关于前面的实施例的图中描绘的纤维-光纤耦合器处的反射与第一部分分离。第二部分然后可以第二次通过移频器140E,从而得到频率f0+2fm(第一部分的频率在f0+fm处)。第二部分然后可以被光学循环器190E引导到第二相位调制器151E以应用代码并且将射束传递到第二纤维耦合器170E以用于在发送之前与第一部分重新组合。
图5F描绘与图5E中的激光雷达传感器100E类似的、但是只使用单个相位调制器150F和用于分离初始射束的第一部分和第二部分的不同的方法的实施例激光雷达传感器100F。如所示,代替移频器140F和相位调制器150F之间的部分反射镜,可以包括第二纤维耦合器171F,并且可以在收发器120F/130F的前面,在相位调制器150F和纤维耦合器172F之间提供第二光学循环器191F。因此,可以在第二纤维耦合器171F处分离初始射束的第二部分,第二纤维耦合器171F可以引导第二部分通过相位调制器150F、到达第二光学循环器191F。第二部分然后可以在相反的方向上被引导通过相位调制器150F和移频器140F(从而如图5E中那样得到f0+2fm的频率)。最后,第一光学循环器190F可以在与第一部分重新组合之前引导第二部分通过延迟线200F。
图5G描绘与图5E中的激光雷达传感器100E类似的、但是为第一部分和第二部分这二者提供相同代码的实施例激光雷达传感器100G。如所示,单个相位调制器150G可以被设在第二纤维耦合器171G的下游,纤维耦合器和第二光学循环器191G之间,收发器120G/130G的正前面,以使得两个部分都接收同一代码。
图5H描绘被进一步简化为只包括一个移频器140H和一个相位调制器150H的实施例激光雷达传感器100H,其中初始射束的一个部分保持不移位。相反,来自激光器110H的初始射束仅在第一纤维耦合器170H处被划分一次,被划分为发送部分和内部部分。发送部分被引导到移频器140H,不同于前面描述的实施例,移频器140H将两个叠加的频率调制提供到发送部分上。如所示,fm和fm+Δf的频率被用于使发送部分移位(从f0的频率开始)。因此,然后可以产生具有Δf的频率的组合射束。组合射束然后可以被引导到相位调制器150H,相位调制器150H在将射束沿着朝向收发器120H/130H传递之前应用单个代码。因此,使用组合频率Δf和单个代码,反射射束的分析可以类似于以上讨论的那些分析。
因此,各种不同的激光雷达传感器是可能的,并且上述实施例的其他组合和置换将被本领域技术人员理解为本文中的公开的一部分。
除了上述超外差激光雷达传感器之外,超外差激光雷达传感器还可以用于从它在光学传感器上产生的直流(“DC”)信号测量反射光的相位。图6A-6C描绘使用这些技术的不同的激光雷达传感器,其中某些组件类似于图5A-5H中的那些组件,除非另有陈述。
图6A描绘具有与图5A中的激光雷达传感器100A基本上类似的布局和操作模式的、但是没有移频器的激光雷达传感器100I。另外,激光雷达传感器100I可以包括将不同的代码c1提供给将被发送的初始光束的第一部分的相位调制器150I、151I。如所示,代码c1可以是“条形码”(诸如前面描述的并且在图7A中被示为伪随机噪声代码的条形码)和周期性图案(诸如图7A中描绘的锯齿形相位调制)的组合,从而得到图7A中描绘的组合代码c1。再次,代码c1和c2可以彼此正交。这些代码上的进一步的变化也是可能的。例如,周期性图案可以是线性锯齿、二次锯齿、三次锯齿、正弦曲线,或者具有某个其他的轮廓。
在具有代码c1和c2的组合信号已经被发送、反射和接收之后,所述代码可以用于识别接收的反射射束的发送时间。类似的分析还可以如上述超外差处理(诸如多普勒频率估计和跟踪、以及将接收的射束的相位与发送的射束进行比较以降低噪声)中那样被应用于接收的信号。
如以上其他实施例中所讨论的,图6A中的激光雷达传感器接收的反射射束还可以用于测量与反射点处的物体相关的各种特征。然而,可能存在一些差异。
例如,在前面描述的方法中,可以使用发送的反射射束和接收的反射射束的光场的相位差来确定距离(在对接收的反射射束进行解调以移除代码之后)。尽管前面描述的方法还可能被用于图6A的系统中,但是这里描述锯齿形斜坡代码的周期性的使用。在时间t、在光学传感器180I处测得的相对相位φr等于时间t-2L/c时的调制斜坡的相位:
Φr(t)=Φm(t-2L/c)
其中,L是到物体的距离,c是光速。可以通过简单地使调制斜坡代码的相位φm反相来推导飞行时间2L/c、因此距离LL。类似地,可以在解码之后,使用发送的反射射束和接收的反射射束的相位差来计算反射点的径向速率。可以使用与以上讨论的方法类似的方法来计算横向速率。
反射射束还可以用于测量反射点处的物体的反射率。可以使用查找表来将由光学传感器处的反射射束导致的DC信号的正交振幅与可比距离处的实验结果进行比较,例如,以确定反射率。
此外,减小调制器处的锯齿形相位轮廓的斜率使得可以将目标物体的表面微观轮廓映射到光的测得的相位上。以上讨论的用于确定反射点处的表面的特性的技术也可以与超外差布置一起使用。
如图6B和6C所示,激光雷达传感器100I的设计上的进一步的变化也是可能的,图6B和6C可以类似于图6A中的实施例,除非有相反的指示,具有指示类似组件的类似的名称和标号。例如,如图6B所示,激光雷达传感器100J可以只包括一个相位调制器150J。如图6A所示,初始光束的第一部分可以通过相位调制器150J和三个光学循环器190J、191J、192J。初始光束的第二部分可以在相反的方向上被引导通过相位调制器150J,然后使用第一光学循环器190J被引导通过可选的延迟线200J。该延迟可以导致第二部分具有与第一部分的代码正交的代码,当它们被重新组合时。应注意到,该激光雷达100J与图5B中描绘的激光雷达100B基本上类似(没有移频器)。如图7B中描绘的,相位调制器150J提供的相位调制可以可选地包括与抛物线锯齿形图案组合的伪随机二进制代码。
图6C描绘与图6A中的激光雷达传感器100I类似的、具有一些微小的差异的实施例激光雷达传感器100K。例如,收发器120K/130K可以取代图6A中的单独的组件。
如图5A-5H中描绘的超外差例子中那样,还可以提供超外差激光雷达传感器上的附加变化。例如,可以使用光纤纤维耦合器或部分反射的线内回射器来分离第一部分和第二部分。这可以被沿着单独的路径发送,或者可以组合在单个路径中。它们还可以可选地被提供相同的代码。
图9-11描绘用于测量距离的各种方法,这些方法可以可选地使用上述系统来实现。如图9所示,初始射束(诸如从激光器110产生的射束)可以被划分为发送部分和内部部分。发送部分可以在被引导到环境中之前,使其相位被调制以嵌入唯一代码(如以上所讨论的)。然后可以通过检测所述唯一代码来识别接收的由发送部分导致的反射射束。然后可以使用反射射束和内部部分来估计到反射点的距离。
图10中描绘的方法与图9中描绘的方法基本上类似,但是示出两个单独的发送部分可以用于同时检测距离。图11中描绘的方法也与图9和图10中描绘的方法类似,但是示出除了距离之外,还可以估计多个值,诸如径向速率和横向速率。
根据一个实施例,本文中描述的技术(诸如用于测量距离、速率和表面特性)由至少一个计算装置实现。所述技术可以整个地或部分地使用至少一个服务器计算机和/或使用网络(诸如封包数据网络)耦合的其他计算装置来实现。所述计算装置可以被硬连线来执行所述技术,或者可以包括被持久地编程为执行所述技术的数字电子装置,诸如至少一个专用集成电路(ASIC)或现场可编程门阵列(FPGA),或者可以包括被编程为按照固件、存储器、其他储存器或组合中的指令执行所述技术的至少一个通用硬件处理器。这样的计算装置还可以组合具有实现所描述的技术的自定义编程的自定义的、硬连线的逻辑、ASIC、FPGA。所述计算装置可以是服务器计算机、工作站、个人计算机、便携式计算机系统、手持装置、移动计算装置、可穿戴装置、身体安装的或可植入的装置、智能电话、智能电器、联网装置、自主或半自主装置(诸如机器人或无人地面或空中交通工具)、合并实现所描述的技术的硬连线的逻辑和/或程序逻辑的任何其他的电子装置、数据中心中的一个或多个虚拟计算机器或实例、和/或服务器计算机和/或个人计算机的网络。
图8是例示说明利用其可以实现实施例的示例计算机系统的框图。在图3的例子中,计算机系统300和用于用硬件、软件、硬件和软件的组合实现所公开的技术的指令被以本公开有关领域的普通技术人员常用于交流计算机架构和计算机系统实现的相同的详细程度、示意性地表示,例如,被表示为方框和圆圈。
计算机系统300包括输入/输出(I/O)子系统302,I/O子系统302可以包括用于通过电子信号路径在计算机系统300的组件之间传送信息和/或指令的总线和/或其他的通信机制(一个或多个)。I/O子系统302可以包括I/O控制器、存储器控制器和至少一个I/O端口。电子信号路径在附图中被示意性地表示,例如被表示为线、单向箭头或双向箭头。
至少一个硬件处理器304耦合到I/O子系统302,用于处理信息和指令。硬件处理器304可以包括例如通用微处理器或微控制器和/或专用微处理器(诸如嵌入式系统或图形处理单元(GPU)或数字信号处理器或ARM处理器)。处理器304可以包括集成算术逻辑单元(ALU),或者可以耦合到单独的ALU。
计算机系统300包括耦合到I/O子系统302的、用于电子地数字地存储处理器304将执行的数据和指令的存储器306(诸如主存储器)的一个或多个单元。存储器306可以包括易失性存储器,诸如各种形式的随机存取存储器(RAM)或其他的动态存储装置。存储器306还可以用于在处理器304将执行的指令的执行期间存储暂时的变量或其他的中间信息。这样的指令在被存储在处理器304可访问的非暂时性计算机可读存储介质中时,可以使计算机系统300变为被定制指令中指定的操作的专用机器。
计算机系统300进一步包括用于存储用于处理器304的信息和指令的非易失性存储器,诸如只读存储器(ROM)308或其他的静态存储装置。ROM 308可以包括各种形式的可编程ROM(PROM),诸如可擦除PROM(EPROM)或电可擦除PROM(EEPROM)。持久储存器310的单元可以包括各种形式的非易失性RAM(NVRAM),诸如闪存、或固态储存器、磁盘或光盘(诸如CD-ROM或DVD-ROM),并且可以耦合到I/O子系统302,用于存储信息和指令。储存器310是可以用于存储当被处理器304执行时、使得执行执行本文中的技术的计算机实现方法的指令的非暂时性计算机可读介质的例子。
存储器306、ROM 308或储存器310中的指令可以包括被组织为模块、方法、对象、函数、例行程序等的一个或多个指令集。所述指令可以被组织为一个或多个计算机程序、操作系统服务、或包括移动app的应用程序。所述指令可以包括操作系统和/或系统软件;支持多媒体、编程或其他功能的一个或多个库;实现TCP/IP、HTTP或其他通信协议的数据协议指令或堆栈;解析或渲染使用HTML、XML、JPEG、MPEG或PNG编码的文件的文件格式处理指令;渲染或解释用于图形用户界面(GUI)、命令行界面或文本用户界面的命令的用户界面指令;应用软件,诸如办公套件、互联网访问应用、设计和制造应用、图形应用、音频应用、软件工程应用、教育应用、游戏或其他应用。所述指令可以实现web服务器、web应用服务器或web客户端。所述指令可以使用结构化查询语言(SQL)或者无SQL、对象存储、图形数据库、平面文件系统或其他数据存储而被组织为呈现层、应用层和数据存储层(诸如关系数据库系统)。
计算机系统300可以经由I/O子系统302耦合到至少一个输出装置312。在一个实施例中,输出装置312是数字计算机显示器。各种实施例中可以使用的显示器的例子包括触摸屏显示或发光二极管(LED)显示器、或液晶显示器(LCD)或电子纸显示器。计算机系统300可以包括替换或补充显示装置的其他类型(一种或多种)的输出装置312。其他的输出装置312的例子包括打印机、票据打印机、绘图仪、投影仪、声卡或视频卡、扬声器、蜂鸣器或压电装置或其他的可听装置、灯或LED或LCD指示器、触觉装置、致动器或伺服机构。
至少一个输入装置314耦合到I/O子系统302,用于将信号、数据、命令选择或手势传送给处理器304。输入装置314的例子包括光学传感器和本文中描述的其他传感器,可能还有其他装置,诸如触摸屏、麦克风、静态和视频数字相机、字母数字键和其他键、键区、键盘、图形平板、图像扫描仪、操纵杆、时钟、开关、按钮、拨号盘、滑块和/或各种类型的传感器(诸如力传感器、运动传感器、热传感器、加速计、陀螺仪和惯性测量单元(IMU)传感器)、和/或各种类型的收发器(诸如无线的(诸如蜂窝或Wi-Fi、射频(RF)或红外(IR)收发器)和全球定位系统(GPS)收发器)。
另一类型的输入装置是控制装置316,替换输入功能或者除了输入功能之外,控制装置316可以在显示屏幕上的图形界面中执行光标控制或其他自动控制功能(诸如导航)。控制装置316可以是用于将方向信息和命令选择传送给处理器304并且用于控制显示器312上的光标移动的触摸板、鼠标、轨迹球或光标方向键。输入装置可以至少具有使得装置可以指定平面中的位置的、两个轴(第一轴(例如,x)和第二轴(例如,y))上的两个自由度。另一类型的输入装置是有线、无线或光学控制装置,诸如操纵杆、魔术棒、控制台、转向轮、踏板、换挡机构或其他类型的控制装置。输入装置314可以包括多个不同的输入装置的组合,诸如摄像机和深度传感器。
在另一个实施例中,计算机系统300可以包括物联网(IoT)装置,在该装置中,输出装置312、输入装置314和控制装置316被省略。或者,在这样的实施例中,输入装置314可以包括一个或多个相机、运动检测器、温度计、麦克风、地震检测器、其他传感器或检测器、测量装置或编码器,输出装置312可以包括专用显示器,诸如单线LED或LCD显示器、一个或多个指示器、显示面板、仪表、阀门、螺线管、致动器或伺服机构。
当计算机系统300是移动计算装置时,输入装置314可以包括耦合到GPS模块的全球定位系统(GPS)接收器,GPS模块能够三角划分到多个GPS卫星、确定并且产生地理地点或位置数据,诸如计算机系统300的地球物理地点的纬度-经度值。输出装置312可以包括用于产生位置报告封包、通知、脉搏或心跳信号、或单独地或者与被引向主机324或服务器330的其他应用特定的数据组合指定计算机系统300的位置的其他的反复出现的数据传输的硬件、软件、固件和接口。
计算机系统300可以使用当被加载并且被与计算机系统组合使用或执行时、使计算机系统或者将计算机系统编程为作为专用机器操作的、定制的硬连线的逻辑、至少一个ASIC或FPGA、固件和/或程序指令或逻辑来实现本文中描述的技术。根据一个实施例,本文中的技术由计算机系统300响应于处理器304执行主存储器306中包含的至少一个指令的至少一个序列执行。这样的指令可以从另一个存储介质(诸如储存器310)被读取到主存储器306中。主存储器306中包含的指令序列的执行使处理器304执行本文中描述的处理步骤。在可替换的实施例中,硬连线的电路系统可以被用来代替软件指令或者与软件指令组合使用。
如本文中使用的术语“存储介质”是指存储使机器以特定的方式操作的数据和/或指令的任何非暂时性介质。这样的存储介质可以包括非易失性介质和/或易失性介质。非易失性介质包括例如光盘或磁盘,诸如储存器310。易失性介质包括动态存储器,诸如存储器306。常见形式的存储介质包括,例如,硬盘、固态驱动器、闪速驱动器、磁性数据存储介质、任何光学或物理数据存储介质、存储器芯片等。
存储介质不同于传输介质,但是可以与传输介质结合使用。传输介质参与在存储介质之间传送信息。例如,传输介质包括同轴电缆、铜线和纤维光学器件,所述纤维光学器件包括包括I/O子系统302的总线的导线。传输介质还可以采取声波或光波的形式,诸如无线电波和红外线数据通信期间产生的那些。
各种形式的介质可以涉及将至少一个指令的至少一个序列传载给处理器304以供执行。例如,所述指令可以一开始被承载在远程计算机的磁盘或固态驱动器上。远程计算机可以将指令加载到其动态存储器中,并且通过通信链路(诸如光纤或同轴电缆或使用调制解调器的电话线)发送指令。计算机系统300本地的调制解调器或路由器可以在通信链路上接收数据,并且将数据转换为计算机系统300可以读取的格式。例如,接收器(诸如射频天线或红外线检测器)可以接收无线或光学信号中承载的数据,并且适当的电路系统可以将数据提供给I/O子系统302,诸如将数据放在总线上。I/O子系统302将数据传载给存储器306,处理器304从存储器306检索并且执行指令。存储器306接收的指令可以可选地要么在处理器304执行之前、要么在处理器304执行之后,被存储在储存器310上。
计算机系统300还包括耦合到总线302的通信接口318。通信接口318提供与直接或间接连接到至少一个通信网络(诸如网络322或互联网上的公共或私有云)的网络链路(一个或多个)320的双向数据通信。例如,通信接口318可以是以太网联网接口、综合服务数字网络(ISDN)卡、电缆调制解调器、卫星调制解调器、或提供与对应类型的通信线路(例如,以太网电缆或任何种类的金属电缆或光纤线路或电话线)的数据通信连接的调制解调器。网络322广义地表示局域网(LAN)、广域网(WAN)、校园网、互联网、或它们的任何组合。通信接口318可以包括提供与可兼容的LAN的数据通信连接的LAN卡、或被连线以根据蜂窝无线电电话无线联网标准发送或接收蜂窝数据的蜂窝无线电电话接口、或被连线以根据卫星无线联网标准发送或接收数字数据的卫星无线电接口。在任何这样的实现中,通信接口318通过传载表示各种类型的信息的数字数据流的信号路径发送和接收电信号、电磁信号或光学信号。
网络链路320通常使用例如卫星、蜂窝、Wi-Fi或蓝牙技术直接地或者通过至少一个网络将电数据通信、电磁数据通信或光学数据通信提供给其他数据装置。例如,网络链路320可以通过网络322提供与主机324的连接。
此外,网络链路320可以经由互联网服务提供商(ISP)326运营的联网装置和/或计算机,通过网络322提供与其他计算装置的连接。ISP 326通过被表示为互联网328的全球封包数据通信网络提供数据通信服务。服务器计算机330可以耦合到互联网328。服务器330广义地表示具有或没有管理程序的任何计算机、数据中心、虚拟机或虚拟计算实例、或执行容器化的程序系统(诸如DOCKER或KUBERNETES)的计算机。服务器330可以表示使用多于一个的计算机或实例实现并且通过发送web服务请求、具有HTTP有效载荷中的参数的统一资源定位符(URL)字符串、API调用、app服务调用或其他服务调用而被访问和使用的电子数字服务。计算机系统300和服务器330可以形成包括其他计算机、处理集群、服务器群、或合作执行任务或执行应用或服务的其他计算机组织的分布式计算系统的元件。服务器330可以包括被组织为模块、方法、对象、函数、例行程序或调用的一个或多个指令集。所述指令可以被组织为一个或多个计算机程序、操作系统服务、或包括移动app的应用程序。所述指令可以包括操作系统和/或系统软件;支持多媒体的一个或多个库;编程或其他函数;实现TCP/IP、HTTP或其他通信协议的数据协议指令或堆栈;解析或渲染使用HTML、XML、JPEG、MPEG或PNG编码的文件的文件格式处理指令;渲染或解释用于图形用户界面(GUI)、命令行界面或文本用户界面的命令的用户界面指令;应用软件,诸如办公套件、互联网访问应用、设计和制造应用、图形应用、音频应用、软件工程应用、教育应用、游戏或其他应用。服务器330可以包括使用结构化查询语言(SQL)或者无SQL、对象存储、图形数据库、平面文件系统或其他数据存储托管呈现层、应用层和数据存储层(诸如关系数据库系统)的web应用服务器。
计算机系统300可以通过网络(一个或多个)、网络链路320和通信接口318发送消息并且接收数据和指令(包括程序代码)。在互联网例子中,服务器330可以通过互联网328、ISP 326、局域网322和通信接口318发送对于应用程序的请求代码。接收的代码可以在它被接收时被处理器304执行,和/或被存储在储存器310或其他非易失性储存器中以供以后执行。
如本节中描述的指令的执行可以实现正被执行的并且由程序代码及其当前的活动组成的计算机程序的实例的形式的处理。根据操作系统(OS),处理可以由同时执行指令的多个指令线程构成。在该背景下,计算机程序是被动的指令集合,而处理可以是这些指令的实际执行。几个处理可以与同一程序相关联;例如,打开同一程序的几个实例通常意味着多于一个的处理正被执行。可以实现多任务处理以使得多个处理可以共享处理器304。尽管每个处理器304或处理器的核一次执行单个任务,但是计算机系统300可以被编程为实现多任务处理以使得每个处理器可以在正被执行的任务之间切换,而不必等待每个任务完成。在实施例中,当任务执行输入/输出操作时,当任务指示它可以被切换时,或者在硬件中断时,可以执行切换。可以实现时间共享以使得可以通过快速地执行上下文切换以同时提供多个处理的并行执行来对交互式用户应用快速地做出响应。在实施例中,为了安全性和可靠性,操作系统可以阻止独立的处理之间的直接通信,从而提供严格调节的且受控的处理间通信功能性。
鉴于以下条款描述一些附加的示例实施例:
条款1.一种激光雷达传感器,包括:
光学传感器,所述光学传感器被配置为至少基于接收到一个或多个光束生成信号;
激光器,所述激光器被配置为发射初始光束,所述初始光束的第一部分被引导到所述环境中,所述初始光束的内部部分被引导到所述光学传感器,其中所述光学传感器被配置为既接收所述初始光束的内部部分,又接收由于所述初始光束的第一部分在所述环境中的第一反射点处被反射而导致的第一反射光束;
处理器,所述处理器被配置为:
从所述光学传感器接收信号;
识别已经由所述初始光束的第一部分导致的所述第一反射光束;
至少基于所述第一反射光束和所述初始光束的内部部分来确定到所述第一反射点的距离;
至少基于所述第一反射光束和所述初始光束的内部部分之间的光场的相位差的时间导数来确定所述反射点相对于所述激光雷达传感器的径向速率;并且
至少基于所述第一反射光束的多普勒频移和确定的径向速率来确定所述反射点相对于所述激光雷达传感器的横向速率。
条款2.根据条款1所述的激光雷达传感器,进一步包括相位调制器,所述相位调制器被配置为在一段时间段内利用唯一代码对所述初始光束的第一部分的相位进行调制,以在所述初始光束的第一部分被引导到所述环境中之前,将所述唯一代码嵌入到所述初始光束的第一部分的调制的相位中。
条款3.根据条款2所述的激光雷达传感器,其中所述确定的距离至少基于至少使用所述唯一代码的、所述第一反射光束的返回时间。
条款4.根据条款1所述的激光雷达传感器,其中所述激光雷达传感器被配置为准确地确定10米以上的距离。
条款5.根据条款4所述的激光雷达传感器,其中所述激光雷达传感器被配置为准确地确定100米以上的距离。
条款6.一种激光雷达传感器,包括:
激光器,所述激光器被配置为发射初始光束;
第一纤维耦合器,所述第一纤维耦合器与所述激光器进行光学通信,以接收所述初始光束,并且将所述初始光束划分为发送部分和内部部分;
光学合成器电路,所述光学合成器电路与所述第一纤维耦合器进行光学通信,以从所述第一纤维耦合器接收所述初始光束的发送部分,并且调整所述初始光束的发送部分的相位;
发送器,所述发送器与所述光学合成器电路进行光学通信,以从所述光学合成器电路接收具有调整的相位的发送部分,并且将所述发送部分引导到所述环境中;
接收器,所述接收器被配置为从所述环境接收由所述初始光束的发送部分导致的反射光束;
第二纤维耦合器,所述第二纤维耦合器与所述接收器和所述第一纤维耦合器进行光学通信,以将所述反射光束和所述初始光束的内部部分组合为组合光束;以及
光学传感器,所述光学传感器与所述第二纤维耦合器进行光学通信,以接收所述第二光束。
条款7.根据条款6所述的激光雷达传感器,其中所述发送器和所述接收器是单个收发器。
条款8.根据条款6所述的激光雷达传感器,其中所述光学合成器电路包括一个或多个相位调制器,所述相位调制器被配置为将唯一代码嵌入到所述初始光束的发送部分的调制的相位中。
条款9.根据条款8所述的激光雷达传感器,其中所述一个或多个相位调制器还被配置为将与所述唯一代码组合的周期性图案嵌入到所述初始光束的发送部分的调制的相位中。
条款10.根据条款6所述的激光雷达传感器,其中所述光学合成器电路进一步包括至少两个不同的光路,并且被配置为将所述初始光束的发送部分分为沿着所述至少两个不同的光路的第一部分和第二部分,并且在所述第一部分和所述第二部分被所述发送器接收之前,重新组合所述第一部分和所述第二部分。
条款11.根据条款10所述的激光雷达传感器,其中所述光学合成器电路包括第三纤维耦合器和第四纤维耦合器,所述第三纤维耦合器被配置为将所述初始光束的发送部分分为所述第一部分和所述第二部分,所述第四纤维耦合器被配置为在所述第一部分和所述第二部分被所述发送器接收之前,重新组合所述第一部分和所述第二部分。
条款12.根据条款10所述的激光雷达传感器,其中所述光学合成器电路包括一个或多个相位调制器,所述一个或多个相位调制器被配置为在所述第一部分和所述第二部分中的每个被重新组合之前,将不同的唯一代码嵌入到所述第一部分和所述第二部分中的每个的调制的相位中。
条款13.根据条款6所述的激光雷达传感器,其中所述光学合成器电路包括移频器,所述移频器被配置为在所述初始光束的发送部分被引导到所述环境中之前,调整所述初始光束的发送部分的频率。
条款14.根据条款6所述的激光雷达传感器,其中所述激光雷达传感器被配置为准确地确定10米以上的距离。
条款15.根据条款14所述的激光雷达传感器,其中所述激光雷达传感器被配置为准确地确定100米以上的距离。
条款16.一种操作激光雷达传感器测量到物体的距离和所述物体的速率的方法,所述方法包括:
将光束划分为发送部分和内部部分;
将所述发送部分引导到所述环境中;
接收由于所述发送部分被引导到所述环境中而导致的反射射束;
使用所述反射射束和所述内部部分来估计到反射点的距离;
至少基于所述反射光束和所述内部部分之间的光场的相位差的时间导数来估计所述反射点相对于所述激光雷达传感器的径向速率;并且
至少基于所述反射射束的多普勒频移和确定的径向速率来估计所述反射点相对于所述激光雷达传感器的横向速率。
条款17.根据条款16所述的方法,进一步包括在一段时间段内利用唯一代码对所述发送部分的相位进行调制,以在所述发送部分被引导到所述环境中之前,将所述唯一代码嵌入到所述发送部分的调制的相位中。
条款18.根据条款17所述的方法,其中至少基于至少使用所述唯一代码的、所述反射射束的返回时间来确定估计的距离。
Claims (90)
1.一种激光雷达传感器,包括:
光学传感器,所述光学传感器被配置为至少基于接收到一个或多个光束生成信号;
激光器,所述激光器被配置为发射初始光束,所述初始光束的第一部分被引导到环境中,所述初始光束的内部部分被引导到所述光学传感器,其中所述光学传感器被配置为既接收所述初始光束的内部部分,又接收由于所述初始光束的第一部分在所述环境中的第一反射点处被反射而导致的第一反射光束;
至少一个相位调制器,所述至少一个相位调制器被配置为在一段时间段内利用唯一代码对所述初始光束的第一部分的相位进行调制,以在所述初始光束的第一部分被引导到所述环境中之前,将所述唯一代码嵌入到所述初始光束的第一部分的调制的相位中;以及
处理器,所述处理器被配置为从所述光学传感器接收信号、并且至少基于检测到所述唯一代码、识别已经由所述初始光束的第一部分导致的所述第一反射光束,并且被进一步配置为至少基于所述第一反射光束和所述初始光束的内部部分来确定到所述第一反射点的距离。
2.根据权利要求1所述的激光雷达传感器,其中所述初始光束的第二部分还在不同于所述初始光束的第一部分的方向上被引导到所述环境中,并且所述光学传感器被配置为接收由于所述初始光束的第二部分在所述环境中的第二反射点处被反射而导致的第二反射光束,所述激光雷达传感器进一步包括:
第二相位调制器,所述第二相位调制器被配置为在一段时间段内利用第二唯一代码对所述初始光束的第二部分的相位进行调制,以在所述初始光束的第二部分被引导到所述环境中之前,将所述第二唯一代码嵌入在其调制的相位中,以使得所述第二唯一代码不同于所述第一唯一代码,
其中所述处理器被配置为至少基于检测到所述第二唯一代码,识别已经由所述初始光束的第二部分导致的第二反射光束,并且被进一步配置为至少基于所述第二反射光束和所述初始光束的内部部分来确定到所述第二反射点的距离,并且
其中所述初始光束的第一部分到所述环境中的引导和所述光学传感器接收所述第一反射光束之间的时间与所述初始光束的第二部分到所述环境中的引导和所述光学传感器接收所述第二反射光束之间的时间重叠。
3.根据权利要求1-2中任一项所述的激光雷达传感器,其中所述处理器被配置为至少基于所述第一反射光束和所述初始光束的内部部分之间的相对相位来确定到所述第一反射点的距离。
4.根据权利要求1-3中任一项所述的激光雷达传感器,其中所述处理器被配置为至少基于至少使用所述唯一代码的、所述第一反射光束的返回时间来确定到所述第一反射点的距离。
5.根据权利要求1-4中任一项所述的激光雷达传感器,进一步包括光学移频器,所述光学移频器被配置为在所述初始光束的第一部分被引导到所述环境中之前,使所述初始光束的第一部分的频率移位。
6.根据权利要求1-5中任一项所述的激光雷达传感器,其中所述激光雷达传感器被配置为准确地确定10米以上的距离。
7.根据权利要求6所述的激光雷达传感器,其中所述激光雷达传感器被配置为准确地确定100米以上的距离。
8.根据权利要求1-7中任一项所述的激光雷达传感器,其中所述至少一个相位调制器另外还被配置为在一时间段内利用周期性图案对所述初始光束的第一部分的相位进行调制,以在所述初始光束的第一部分被引导到所述环境中之前,将与所述唯一代码组合的所述周期性图案嵌入到所述初始光束的第一部分的调制的相位中。
9.根据权利要求1-8中任一项所述的激光雷达传感器,其中所述激光雷达传感器进一步包括:
光学元件,所述光学元件将所述第一部分划分为两个分部;以及
纤维耦合器,所述纤维耦合器在所述第一部分被引导到所述环境中之前重新组合所述两个分部。
10.根据权利要求9所述的激光雷达传感器,进一步包括至少两个光路,第一分部被沿着第一路径引导,所述第二分部被沿着不同于第一路径的第二路径引导,其中所述两个分部每个通过所述至少一个光学调制器,以使得每个分部接收不同的唯一代码。
11.根据权利要求10所述的激光雷达传感器,其中所述至少一个相位调制器包括两个相位调制器,每个分部被不同的相位调制器调制。
12.根据权利要求9-11中任一项所述的激光雷达传感器,进一步包括至少一个光学移频器,所述光学移频器被配置为使所述两个分部的频率移位,以使得每个分部在被重新组合之前具有不同的频率。
13.一种激光雷达传感器,包括:
光学传感器,所述光学传感器被配置为至少基于接收到一个或多个光束生成信号;
激光器,所述激光器被配置为发射初始光束,所述初始光束的第一部分在第一方向上被引导到环境中,所述初始光束的第二部分在不同于第一方向的第二方向上被引导到所述环境中,所述初始光束的内部部分被引导到所述光学传感器,其中所述同一光学传感器被配置为接收以下部分中的每个:所述初始光束的内部部分、由于所述初始光束的第一部分在所述环境中的第一反射点处被反射而导致的第一反射光束、以及由于所述初始光束的第二部分在所述环境中的第二反射点处被反射而导致的第二反射光束;
处理器,所述处理器被配置为从所述光学传感器接收信号、并且识别已经由所述初始光束的第一部分导致的所述第一反射光束、已经由所述初始光束的第二部分导致的所述第二反射光束,并且被进一步配置为至少基于所述第一反射光束和第二反射光束、以及所述初始光束的内部部分来确定到所述第一反射点和第二反射点的距离;
其中所述初始光束的第一部分到所述环境中的引导和所述光学传感器接收第一反射光束之间的时间与所述初始光束的第二部分到所述环境中的引导和所述同一光学传感器接收所述第二反射光束之间的时间重叠。
14.根据权利要求13所述的激光雷达传感器,进一步包括:
一个或多个相位调制器,所述一个或多个相位调制器被配置为在一段时间段内利用不同的唯一代码对所述初始光束的第一部分和第二部分中的每个的相位进行调制,以在被引导到所述环境中之前,将所述唯一代码嵌入到它们的调制的相位中,并且
其中所述处理器被配置为至少基于检测到所述唯一代码,识别已经由所述初始光束的所述部分导致的反射光束。
15.根据权利要求14所述的激光雷达传感器,其中所述一个或多个相位调制器另外还被配置为在一段时间段内利用周期性图案对所述初始光束的第一部分和第二部分中的每个的相位进行调制,以在它们被引导到所述环境中之前,将与所述唯一代码组合的所述周期性图案嵌入到所述初始光束的第一部分和第二部分的调制的相位中。
16.根据权利要求13-15中任一项所述的激光雷达传感器,其中所述处理器被配置为至少基于所述第一反射光束和所述第二反射光束与所述初始光束的内部部分之间的相对相位来确定到所述第一反射点和所述第二反射点的距离。
17.根据权利要求13-16中任一项所述的激光雷达传感器,其中所述处理器被配置为至少基于至少使用所述唯一代码的、所述第一反射光束和所述第二反射光束的返回时间来确定到所述第一反射点和所述第二反射点的距离。
18.根据权利要求13-17中任一项所述的激光雷达传感器,进一步包括一个或多个光学移频器,所述光学移频器被配置为在所述初始光束的第一部分和第二部分被引导到所述环境中之前,使所述初始光束的第一部分和第二部分的频率移位。
19.根据权利要求13-18中任一项所述的激光雷达传感器,其中所述激光雷达传感器被配置为准确地确定10米以上的距离。
20.根据权利要求19所述的激光雷达传感器,其中所述激光雷达传感器被配置为准确地确定100米以上的距离。
21.一种测量距离的方法,包括:
将光束划分为发送部分和内部部分;
在一段时间段内对所述光束的发送部分的相位进行调制,以将唯一代码嵌入到所述发送部分的调制的相位中;
将具有调制的相位的发送部分引导到环境中;
接收由于所述发送部分被引导到所述环境中而导致的反射射束;
至少通过检测所述唯一代码,识别由于所述发送部分被引导到所述环境中而导致的所述反射射束;并且
使用所述反射射束和所述内部部分来估计到反射点的距离。
22.根据权利要求21所述的方法,其中所述唯一代码是伪随机代码。
23.根据权利要求21-22中任一项所述的方法,进一步包括在一段时间段内对所述光束的发送部分的相位进行调制,以将与所述唯一代码组合的周期性图案嵌入到所述发送部分的调制的相位中。
24.根据权利要求21-23中任一项所述的方法,进一步包括:
将所述发送部分划分为第一发送部分和第二发送部分,并且其中,所述调制步骤进一步包括在一段时间段内对所述第一部分和所述第二部分的相位进行调制,以将不同的唯一代码嵌入到所述第一部分和所述第二部分的调制的相位中;并且
在将所述发送部分引导到所述环境中之前,将所述第一发送部分和所述第二发送部分与调制的相位组合。
25.根据权利要求21-24中任一项所述的方法,进一步包括对所述光束的发送部分的频率进行调制,并且其中所述引导步骤包括将具有调制的相位和频率的发送部分引导到所述环境中。
26.一种同时测量多个距离的方法,包括:
将光束划分为第一发送部分、第二发送部分和内部部分;
在不同的方向上将所述第一发送部分和所述第二发送部分引导到所述环境中;
在单个光学传感器处接收由于所述第一发送部分和所述第二发送部分被引导到所述环境中而导致的反射射束;
识别由于所述第一发送部分和所述第二发送部分被引导到所述环境中而导致的所述反射射束;并且
使用所述反射射束和所述内部部分来估计到反射点的距离,
其中所述第一发送部分到所述环境中的引导和接收由所述第一发送部分导致的反射射束之间的时间与所述第二发送部分到所述环境中的引导和接收由所述第二发送部分导致的反射射束之间的时间重叠。
27.根据权利要求26所述的方法,进一步包括在一段时间段内对所述光束的第一发送部分和第二发送部分的相位进行调制,以将不同的唯一代码嵌入到所述第一发送部分和所述第二发送部分中的每个的调制的相位中。
28.根据权利要求27所述的方法,其中所述唯一代码是伪随机代码。
29.根据权利要求27-28中任一项所述的方法,进一步包括在一段时间段内对所述光束的第一发送部分和第二发送部分的相位进行调制,以将与所述唯一代码组合的周期性图案嵌入到所述第一发送部分和所述第二发送部分的调制的相位中。
30.根据权利要求26-29中任一项所述的方法,进一步包括对所述光束的第一发送部分和第二发送部分的频率进行调制,并且其中所述引导步骤包括将具有调制的相位和频率的发送部分引导到所述环境中。
31.一种激光雷达传感器,包括:
光学传感器,所述光学传感器被配置为至少基于接收到一个或多个光束生成信号;
激光器,所述激光器被配置为发射初始光束,所述初始光束的第一部分被引导到所述环境中,所述初始光束的内部部分被引导到所述光学传感器,其中所述光学传感器被配置为既接收所述初始光束的内部部分,又接收由于所述初始光束的第一部分在所述环境中的第一反射点处被反射而导致的第一反射光束;
处理器,所述处理器被配置为:
从所述光学传感器接收信号;
识别已经由所述初始光束的第一部分导致的所述第一反射光束;
至少基于所述第一反射光束和所述初始光束的内部部分来确定到所述反射点的距离;
至少基于所述第一反射光束和所述初始光束的内部部分之间的光场的相位差的时间导数来确定所述反射点相对于所述激光雷达传感器的径向速率;并且
至少基于所述第一反射光束的多普勒频移和确定的径向速率来确定所述反射点相对于所述激光雷达传感器的横向速率。
32.根据权利要求31所述的激光雷达传感器,进一步包括相位调制器,所述相位调制器被配置为在一段时间段内利用唯一代码对所述初始光束的第一部分的相位进行调制,以在所述初始光束的第一部分被引导到所述环境中之前,将所述唯一代码嵌入到所述初始光束的第一部分的调制的相位中。
33.根据权利要求32所述的激光雷达传感器,其中所述确定的距离至少基于至少使用所述唯一代码的、所述第一反射光束的返回时间。
34.根据权利要求31-33中任一项所述的激光雷达传感器,其中所述激光雷达传感器被配置为准确地确定10米以上的距离。
35.根据权利要求34所述的激光雷达传感器,其中所述激光雷达传感器被配置为准确地确定100米以上的距离。
36.一种激光雷达传感器,包括:
激光器,所述激光器被配置为发射初始光束;
第一纤维耦合器,所述第一纤维耦合器与所述激光器进行光学通信,以接收所述初始光束,并且将所述初始光束划分为发送部分和内部部分;
光学合成器电路,所述光学合成器电路与所述第一纤维耦合器进行光学通信,以从所述第一纤维耦合器接收所述初始光束的发送部分,并且调整所述初始光束的发送部分的相位;
发送器,所述发送器与所述光学合成器电路进行光学通信,以从所述光学合成器电路接收具有调整的相位的发送部分,并且将所述发送部分引导到所述环境中;
接收器,所述接收器被配置为从所述环境接收由所述初始光束的发送部分导致的反射光束;
第二纤维耦合器,所述第二纤维耦合器与所述接收器和所述第一纤维耦合器进行光学通信,以将所述反射光束和所述初始光束的内部部分组合为组合光束;以及
光学传感器,所述光学传感器与所述第二纤维耦合器进行光学通信,以接收所述第二光束。
37.根据权利要求36所述的激光雷达传感器,其中所述发送器和所述接收器是单个收发器。
38.根据权利要求36-37中任一项所述的激光雷达传感器,其中所述光学合成器电路包括一个或多个相位调制器,所述相位调制器被配置为将唯一代码嵌入到所述初始光束的发送部分的调制的相位中。
39.根据权利要求38所述的激光雷达传感器,其中所述一个或多个相位调制器还被配置为将与所述唯一代码组合的周期性图案嵌入到所述初始光束的发送部分的调制的相位中。
40.根据权利要求36-39中任一项所述的激光雷达传感器,其中所述光学合成器电路进一步包括至少两个不同的光路,并且被配置为将所述初始光束的发送部分分为沿着所述至少两个不同的光路的第一部分和第二部分,并且在所述第一部分和所述第二部分被所述发送器接收之前,重新组合所述第一部分和所述第二部分。
41.根据权利要求40所述的激光雷达传感器,其中所述光学合成器电路包括第三纤维耦合器和第四纤维耦合器,所述第三纤维耦合器被配置为将所述初始光束的发送部分分为所述第一部分和所述第二部分,所述第四纤维耦合器被配置为在所述第一部分和所述第二部分被所述发送器接收之前,重新组合所述第一部分和所述第二部分。
42.根据权利要求40-41中任一项所述的激光雷达传感器,其中所述光学合成器电路包括一个或多个相位调制器,所述一个或多个相位调制器被配置为在所述第一部分和所述第二部分中的每个被重新组合之前,将不同的唯一代码嵌入到所述第一部分和所述第二部分中的每个的调制的相位中。
43.根据权利要求36-42中任一项所述的激光雷达传感器,其中所述光学合成器电路包括移频器,所述移频器被配置为在所述初始光束的发送部分被引导到所述环境中之前,调整所述初始光束的发送部分的频率。
44.根据权利要求36-43中任一项所述的激光雷达传感器,其中所述激光雷达传感器被配置为准确地确定10米以上的距离。
45.根据权利要求44所述的激光雷达传感器,其中所述激光雷达传感器被配置为准确地确定100米以上的距离。
46.一种操作激光雷达传感器测量到物体的距离和所述物体的速率的方法,所述方法包括:
将光束划分为发送部分和内部部分;
将所述发送部分引导到所述环境中;
接收由于所述发送部分被引导到所述环境中而导致的反射射束;
使用所述反射射束和所述内部部分来估计到反射点的距离;
至少基于所述反射光束和所述内部部分之间的光场的相位差的时间导数来估计所述反射点相对于所述激光雷达传感器的径向速率;并且
至少基于所述反射射束的多普勒频移和确定的径向速率来估计所述反射点相对于所述激光雷达传感器的横向速率。
47.根据权利要求46所述的方法,进一步包括在一段时间段内利用唯一代码对所述发送部分的相位进行调制,以在所述发送部分被引导到所述环境中之前,将所述唯一代码嵌入到所述发送部分的调制的相位中。
48.根据权利要求47所述的方法,其中至少基于至少使用所述唯一代码的、所述反射射束的返回时间来确定估计的距离。
49.一种激光雷达传感器,包括:
光学传感器,所述光学传感器被配置为至少基于接收到一个或多个光束生成信号;
激光器,所述激光器被配置为发射初始光束,所述初始光束的第一部分被引导到所述环境中,所述初始光束的内部部分被引导到所述光学传感器,其中所述光学传感器被配置为既接收所述初始光束的内部部分,又接收由于所述初始光束的第一部分在所述环境中的反射点处被反射而导致的反射光束;以及
处理器,所述处理器被配置为:
从所述光学传感器接收信号;
识别已经由所述初始光束的第一部分导致的所述反射光束;
至少基于所述反射光束和所述初始光束的内部部分来确定到所述反射点的距离;
确定所述反射点相对于所述激光雷达传感器的径向速率;并且
至少基于所述反射射束的旁瓣宽度来确定所述反射点相对于所述激光雷达传感器的横向速率。
50.根据权利要求49所述的激光雷达传感器,进一步包括相位调制器,所述相位调制器被配置为在一段时间段内利用唯一代码对所述初始光束的第一部分的相位进行调制,以在所述初始光束的第一部分被引导到所述环境中之前,将所述唯一代码嵌入到所述初始光束的第一部分的调制的相位中。
51.根据权利要求50所述的激光雷达传感器,其中确定的距离至少基于至少使用所述唯一代码的、所述反射光束的返回时间。
52.根据权利要求49-51中任一项所述的激光雷达传感器,其中所述激光雷达传感器被配置为准确地确定10米以上的距离。
53.根据权利要求52所述的激光雷达传感器,其中所述激光雷达传感器被配置为准确地确定100米以上的距离。
54.根据权利要求49-53中任一项所述的激光雷达传感器,其中所述处理器被配置为至少基于确定的径向速率来确定所述反射点相对于所述激光雷达传感器的横向速率。
55.根据权利要求49-54中任一项所述的激光雷达传感器,其中所述处理器被配置为至少基于确定的距离来确定所述反射点相对于所述激光雷达传感器的横向速率。
56.根据权利要求49-55中任一项所述的激光雷达传感器,其中所述处理器被配置为至少基于多普勒频移来确定所述反射点相对于所述激光雷达传感器的径向速率。
57.根据权利要求49-56中任一项所述的激光雷达传感器,其中所述处理器被配置为至少基于所述反射光束和所述初始光束的内部部分之间的光场的相位差的时间导数来确定所述反射点相对于所述激光雷达传感器的径向速率。
58.根据权利要求49-57中任一项所述的激光雷达传感器,其中所述处理器被配置为至少使用最佳拟合算法来确定所述旁瓣宽度。
59.根据权利要求49-58中任一项所述的激光雷达传感器,其中所述处理器被配置为至少使用机器学习算法来确定所述旁瓣宽度。
60.根据权利要求49-59中任一项所述的激光雷达传感器,其中所述处理器被配置为至少基于所述反射光束的光谱分析来确定所述反射点处的物体的表面的一个或多个特性。
61.一种操作激光雷达传感器测量到物体的距离和所述物体的速率的方法,所述方法包括:
将光束划分为发送部分和内部部分;
将所述发送部分引导到所述环境中;
接收由于所述发送部分被引导到环境中而导致的反射射束;
使用所述反射射束和所述内部部分来确定到反射点的距离;
确定所述反射点相对于所述激光雷达传感器的径向速率;并且
至少基于所述反射射束的旁瓣宽度来确定所述反射点相对于所述激光雷达传感器的横向速率。
62.根据权利要求61所述的方法,进一步包括在一段时间段内利用唯一代码对所述发送部分的相位进行调制,以在所述发送部分被引导到所述环境中之前,将所述唯一代码嵌入到所述发送部分的调制的相位中。
63.根据权利要求62所述的方法,其中至少基于至少使用所述唯一代码的、所述反射射束的返回时间来确定所述距离。
64.根据权利要求61-63中任一项所述的方法,其中至少基于确定的径向速率来确定所述反射点相对于所述激光雷达传感器的横向速率。
65.根据权利要求61-64中任一项所述的方法,其中至少基于确定的距离来确定所述反射点相对于所述激光雷达传感器的横向速率。
66.根据权利要求61-65中任一项所述的方法,其中至少基于多普勒频移来确定所述反射点相对于所述激光雷达传感器的径向速率。
67.根据权利要求61-66中任一项所述的方法,其中至少基于所述反射射束和所述初始光束的内部部分之间的光场的相位差的时间导数来确定所述反射点相对于所述激光雷达传感器的径向速率。
68.根据权利要求61-67中任一项所述的方法,其中至少使用最佳拟合算法来确定所述旁瓣宽度。
69.根据权利要求61-68中任一项所述的方法,其中至少使用机器学习算法来确定所述旁瓣宽度。
70.根据权利要求61-69中任一项所述的方法,进一步包括至少基于所述反射射束的光谱分析来确定所述反射点处的表面的一个或多个特性的步骤。
71.一种激光雷达传感器,包括:
光学传感器,所述光学传感器被配置为至少基于接收到一个或多个光束生成信号;
激光器,所述激光器被配置为发射初始光束,所述初始光束的第一部分被引导到环境中,所述初始光束的内部部分被引导到所述光学传感器,其中所述光学传感器被配置为既接收所述初始光束的内部部分,又接收由于所述初始光束的第一部分在所述环境中的第一反射点处被反射而导致的反射光束;以及
处理器,所述处理器被配置为:
从所述光学传感器接收信号;
识别已经由所述初始光束的第一部分导致的所述反射光束;
至少基于所述反射光束和所述初始光束的内部部分来确定到所述反射点的距离;并且
至少基于所述反射光束的光谱分析来确定所述反射点处的物体的表面的一个或多个特性。
72.根据权利要求71所述的激光雷达传感器,进一步包括相位调制器,所述相位调制器被配置为在一段时间段内利用唯一代码对所述初始光束的第一部分的相位进行调制,以在所述初始光束的第一部分被引导到所述环境中之前,将所述唯一代码嵌入到所述初始光束的第一部分的调制的相位中。
73.根据权利要求72所述的激光雷达传感器,其中确定的距离至少基于至少使用所述唯一代码的、所述反射光束的返回时间。
74.根据权利要求71-73中任一项所述的激光雷达传感器,其中所述激光雷达传感器被配置为准确地确定10米以上的距离。
75.根据权利要求74所述的激光雷达传感器,其中所述激光雷达传感器被配置为准确地确定100米以上的距离。
76.根据权利要求71-75中任一项所述的激光雷达传感器,其中所述处理器被配置为至少基于所述反射射束的旁瓣的振幅来确定所述表面的粗糙度。
77.根据权利要求71-76中任一项所述的激光雷达传感器,其中所述处理器被配置为基于所述反射射束的光谱分析来确定所述物体的材料。
78.根据权利要求77所述的激光雷达传感器,其中所述处理器被配置为使用机器学习算法来确定所述材料。
79.根据权利要求77-78中任一项所述的激光雷达传感器,其中所述处理器被配置为使用相对频率间隔和所述反射光束的旁瓣的振幅的组合来确定所述材料。
80.根据权利要求77-79中任一项所述的激光雷达传感器,其中所述处理器被配置为识别所述反射光束的光谱中的图案以确定所述材料。
81.根据权利要求71-80中任一项所述的激光雷达传感器,其中所述光谱分析包括所述反射光束的光谱中的图案的分析。
82.一种操作激光雷达传感器测量到物体的距离和所述物体的速率的方法,所述方法包括:
将光束划分为发送部分和内部部分;
将所述发送部分引导到环境中;
接收由于所述发送部分被引导到所述环境中而导致的反射射束;
使用所述反射射束和所述内部部分来确定到反射点的距离;
确定所述反射点相对于所述激光雷达传感器的径向速率;并且
至少基于所述反射射束的光谱分析来确定所述反射点处的表面的一个或多个特性。
83.根据权利要求82所述的方法,进一步包括在一段时间段内利用唯一代码对所述发送部分的相位进行调制,以在所述发送部分被引导到所述环境中之前,将所述唯一代码嵌入到所述发送部分的调制的相位中。
84.根据权利要求82-83中任一项所述的方法,其中至少基于至少使用所述唯一代码的、所述反射射束的返回时间来确定所述距离。
85.根据权利要求82-84中任一项所述的方法,其中所述一个或多个特性包括所述表面的粗糙度,并且至少基于所述反射射束的旁瓣的振幅来确定所述粗糙度。
86.根据权利要求82-85中任一项所述的方法,其中所述一个或多个特性包括所述表面的材料。
87.根据权利要求86所述的方法,其中至少基于使用机器学习的、所述反射射束的光谱分析来确定所述材料。
88.根据权利要求86-87中任一项所述的方法,其中至少基于相对频率间隔和所述反射射束的旁瓣的振幅的组合来确定所述材料。
89.根据权利要求86-88中任一项所述的方法,其中至少基于所述反射射束的光谱中的图案来确定所述材料。
90.根据权利要求82-89中任一项所述的方法,其中所述光谱分析包括所述反射光束的光谱中的图案的分析。
Applications Claiming Priority (9)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201862692417P | 2018-06-29 | 2018-06-29 | |
| US62/692,417 | 2018-06-29 | ||
| US16/298,752 | 2019-03-11 | ||
| US16/298,752 US10444366B1 (en) | 2018-06-29 | 2019-03-11 | Perception systems for use in autonomously controlling systems |
| US201962850933P | 2019-05-21 | 2019-05-21 | |
| US62/850,933 | 2019-05-21 | ||
| US16/427,215 | 2019-05-30 | ||
| US16/427,215 US20200003900A1 (en) | 2018-06-29 | 2019-05-30 | Systems and methods for measuring characteristics of an object at distance |
| PCT/US2019/037640 WO2020005641A1 (en) | 2018-06-29 | 2019-06-18 | Perception systems for use in autonomously controlling systems |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN112534304A true CN112534304A (zh) | 2021-03-19 |
Family
ID=69008050
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201980052040.1A Pending CN112534304A (zh) | 2018-06-29 | 2019-06-18 | 用于自主地控制系统的感知系统 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20200003900A1 (zh) |
| EP (1) | EP3814802A1 (zh) |
| JP (1) | JP2021529959A (zh) |
| CN (1) | CN112534304A (zh) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112424639A (zh) * | 2018-06-22 | 2021-02-26 | ams有限公司 | 使用飞行时间和伪随机比特序列测量到物体的距离 |
| US10656272B1 (en) * | 2019-04-24 | 2020-05-19 | Aeye, Inc. | Ladar system and method with polarized receivers |
| CA3146414A1 (en) | 2019-07-15 | 2021-03-25 | Blackmore Sensors & Analytics, Llc | Method and system for sidelobe suppression in phase encoded doppler lidar |
| US10838061B1 (en) * | 2019-07-16 | 2020-11-17 | Blackmore Sensors & Analytics, LLC. | Method and system for enhanced velocity resolution and signal to noise ratio in optical phase-encoded range detection |
| US11899116B2 (en) * | 2019-10-24 | 2024-02-13 | Nuro, Inc. | Single beam digitally modulated lidar for autonomous vehicle distance sensing |
| US11675069B2 (en) * | 2020-10-08 | 2023-06-13 | Oewaves, Inc. | Dual Lidar and radar photonic instrument |
| US20220291348A1 (en) * | 2021-03-10 | 2022-09-15 | Luminar, Llc | Hybrid pulsed/coherent lidar system |
| US20230221139A1 (en) * | 2022-01-12 | 2023-07-13 | Woven Alpha, Inc. | Roadmap generation system and method of using |
| CN115877361B (zh) * | 2023-01-29 | 2023-05-12 | 深圳煜炜光学科技有限公司 | 一种具有表面污物快速检测的激光雷达及其实现方法 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3743181B2 (ja) * | 1998-11-16 | 2006-02-08 | 三菱電機株式会社 | パルスドップラレーダ装置 |
| US6646723B1 (en) * | 2002-05-07 | 2003-11-11 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | High precision laser range sensor |
| DE102009025201B3 (de) * | 2009-06-12 | 2011-01-27 | Konrad Maierhofer | Projektionsvorrichtung |
| US9025140B2 (en) * | 2013-05-07 | 2015-05-05 | Google Inc. | Methods and systems for detecting weather conditions including sunlight using vehicle onboard sensors |
| WO2016154320A1 (en) * | 2015-03-24 | 2016-09-29 | Carrier Corporation | System and method for determining rf sensor performance relative to a floor plan |
| US11536805B2 (en) * | 2018-06-25 | 2022-12-27 | Silc Technologies, Inc. | Optical switching for tuning direction of LIDAR output signals |
-
2019
- 2019-05-30 US US16/427,215 patent/US20200003900A1/en not_active Abandoned
- 2019-06-18 CN CN201980052040.1A patent/CN112534304A/zh active Pending
- 2019-06-18 EP EP19737349.1A patent/EP3814802A1/en active Pending
- 2019-06-18 JP JP2020573488A patent/JP2021529959A/ja active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| JP2021529959A (ja) | 2021-11-04 |
| US20200003900A1 (en) | 2020-01-02 |
| EP3814802A1 (en) | 2021-05-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN112534304A (zh) | 用于自主地控制系统的感知系统 | |
| AU2022200101C1 (en) | Providing spatial displacement of transmit and receive modes in lidar system | |
| US11675051B2 (en) | Perception systems for use in autonomously controlling systems | |
| US11561304B2 (en) | LIDAR system | |
| CN112601999A (zh) | 用于利用准直射束扇形扫描相干lidar的方法和系统 | |
| CN112154347A (zh) | 使用相干距离多普勒光学传感器控制自主车辆的方法和系统 | |
| US11835630B2 (en) | Method and system for refractive beam-steering | |
| US20200166617A1 (en) | Lidar system for autonomous vehicle | |
| US10444366B1 (en) | Perception systems for use in autonomously controlling systems | |
| US11953677B2 (en) | Method and system for optimizing scanning of coherent LIDAR | |
| CN113260873A (zh) | 带有具有折射分面的可旋转多边形偏转器的lidar设备 | |
| WO2020005641A1 (en) | Perception systems for use in autonomously controlling systems | |
| US20230367014A1 (en) | Beam steering techniques for correcting scan line compression in lidar devices | |
| KR102664858B1 (ko) | 굴절 패싯을 가지는 회전형 폴리곤 편향기를 구비한 lidar 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |