CN112357784B - Cantilever crane for workshop hoisting and use method thereof - Google Patents
Cantilever crane for workshop hoisting and use method thereof Download PDFInfo
- Publication number
- CN112357784B CN112357784B CN202110047859.8A CN202110047859A CN112357784B CN 112357784 B CN112357784 B CN 112357784B CN 202110047859 A CN202110047859 A CN 202110047859A CN 112357784 B CN112357784 B CN 112357784B
- Authority
- CN
- China
- Prior art keywords
- fixedly connected
- servo motor
- shaped
- sliding
- gear
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/16—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes with jibs supported by columns, e.g. towers having their lower end mounted for slewing movements
- B66C23/163—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes with jibs supported by columns, e.g. towers having their lower end mounted for slewing movements where only part of the column rotates, i.e. at least the bottom part is fixed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C1/00—Load-engaging elements or devices attached to lifting or lowering gear of cranes or adapted for connection therewith for transmitting lifting forces to articles or groups of articles
- B66C1/10—Load-engaging elements or devices attached to lifting or lowering gear of cranes or adapted for connection therewith for transmitting lifting forces to articles or groups of articles by mechanical means
- B66C1/42—Gripping members engaging only the external or internal surfaces of the articles
- B66C1/44—Gripping members engaging only the external or internal surfaces of the articles and applying frictional forces
- B66C1/445—Gripping members engaging only the external or internal surfaces of the articles and applying frictional forces motor actuated
- B66C1/447—Gripping members engaging only the external or internal surfaces of the articles and applying frictional forces motor actuated by hydraulic or pneumatic motors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/62—Constructional features or details
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/62—Constructional features or details
- B66C23/72—Counterweights or supports for balancing lifting couples
- B66C23/74—Counterweights or supports for balancing lifting couples separate from jib
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/62—Constructional features or details
- B66C23/72—Counterweights or supports for balancing lifting couples
- B66C23/78—Supports, e.g. outriggers, for mobile cranes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/62—Constructional features or details
- B66C23/84—Slewing gear
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/88—Safety gear
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C2700/00—Cranes
- B66C2700/03—Cranes with arms or jibs; Multiple cranes
- B66C2700/0392—Movement of the crane arm; Coupling of the crane arm with the counterweights; Safety devices for the movement of the arm
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
- Jib Cranes (AREA)
Abstract
The invention provides a cantilever crane for workshop hoisting and a using method thereof, belonging to the technical field of cranes and comprising the following steps: a hollow upright post; the hydraulic cylinder is arranged in the hollow upright post; the auxiliary sliding mechanism is arranged in the hollow upright post and is connected with the hydraulic cylinder, and the auxiliary sliding mechanism is lifted through the hydraulic cylinder; the clamping mechanism is arranged on the right side of the hollow upright post and is used for clamping an article; the winding mechanism is arranged on the upper side of the clamping mechanism and connected with the clamping mechanism, and the winding mechanism is used for realizing the winding and unwinding of the clamping mechanism; finally, the stability of the crane can be improved when the angles of the cantilever and the hook claw are adjusted, the crane is prevented from being damaged due to unstable center, the service life of the crane is prolonged, and accidents in a workshop are prevented.
Description
Technical Field
The invention belongs to the technical field of cranes, and particularly relates to a cantilever crane for workshop hoisting and a using method thereof.
Background
The crane refers to a multi-action crane for vertically lifting and horizontally carrying heavy objects within a certain range. Also known as crown blocks, navigation cranes and cranes. The tire crane is mainly characterized in that: the traveling cab and the crane control cab are integrated into a whole and are formed by evolving a crawler crane (crawler crane), a crawler and a traveling support part of a traveling mechanism are changed into a chassis with tires, the defect that a crawler plate of the crawler crane (crawler crane) damages a road surface is overcome, and the material handling machine belongs to material handling machinery. The bridge crane is a hoisting device which is transversely arranged above workshops, warehouses and stockyards to hoist materials. Since its two ends are seated on a tall concrete column or a metal bracket, it is shaped like a bridge. The bridge frame of the bridge crane runs longitudinally along the rails laid on the elevated frames at two sides, so that the space below the bridge frame can be fully utilized to hoist materials without being hindered by ground equipment. The lifting machine has the widest application range and the largest quantity.
The cantilever crane for lifting in the workshop is not convenient to adjust the angle of a cantilever and a hook claw of the crane when used in the workshop, is inconvenient to take articles through the hook claw in the workshop, and has the problem that the gravity center of the crane is unstable when the cantilever and the hook claw of the crane are adjusted in angle, so that the crane is damaged easily due to unstable gravity center, accidents are caused, and the cantilever crane for lifting in the workshop is provided for solving the problem.
Disclosure of Invention
The invention aims to provide a cantilever crane for workshop hoisting and a using method thereof, and aims to solve the problem that the gravity center of the crane is unstable when the angles of a cantilever and a hook claw are adjusted in the prior art.
In order to achieve the purpose, the invention provides the following technical scheme:
a cantilever crane for workshop hoisting and a using method thereof comprise:
a hollow upright post;
the hydraulic cylinder is arranged in the hollow upright post;
the auxiliary sliding mechanism is arranged in the hollow upright post and is connected with the hydraulic cylinder, and the auxiliary sliding mechanism is lifted through the hydraulic cylinder;
the clamping mechanism is arranged on the right side of the hollow upright post and is used for clamping an article;
the winding mechanism is arranged on the upper side of the clamping mechanism and connected with the clamping mechanism, and the winding mechanism is used for realizing the winding and unwinding of the clamping mechanism;
the moving mechanism is arranged on the right side of the hollow upright post and connected with the winding mechanism, and the moving mechanism is used for moving the winding mechanism;
the lifting mechanism is arranged on the right side of the hollow upright post and is positioned on the lower side of the moving mechanism;
the first supporting mechanism is arranged on the right side of the hollow upright post and is used for realizing supporting of the moving mechanism;
the angle adjusting mechanism is arranged on the lower side of the hollow upright post and is used for realizing the support of the hollow upright post and the hydraulic cylinder;
the bottom supporting mechanism is arranged on the lower side of the hollow upright post, the angle adjusting mechanism is positioned in the bottom supporting mechanism, and the bottom supporting mechanism is used for accommodating the angle adjusting mechanism;
the second supporting mechanism is arranged on the lower side of the angle adjusting mechanism and used for supporting the bottom supporting mechanism, the stability of the crane can be improved when the angle of the cantilever and the hook claw is adjusted finally, the crane is prevented from being damaged due to unstable center, the service life of the crane is prolonged, and accidents in a workshop are prevented simultaneously.
As a preferable proposal of the invention, the hollow upright post comprises a first sliding chute, an arc-shaped groove and a first fixing plate, the number of the first sliding chutes is two, the two first sliding chutes are respectively arranged at the left end and the right end of the hollow upright post, the number of the arc-shaped grooves is two, the two arc-shaped grooves are both arranged at the lower end of the hollow upright post, the first fixing plate is fixedly connected at the right end of the hollow upright post, the hydraulic cylinder is positioned in the hollow upright post, the auxiliary sliding mechanism comprises an auxiliary sliding block, a T-shaped sliding block and a T-shaped sliding plate, the auxiliary sliding block is connected in the hollow upright post in a sliding manner, the auxiliary sliding block is fixedly connected with the extending end of the hydraulic cylinder, the T-shaped sliding block is fixedly connected with the left end of the auxiliary sliding block, and T shape slider sliding connection is in being located the first spout on left side, T shape slide fixed connection is in the right-hand member of supplementary slider, and T shape slide sliding connection is in being located the first spout on right side.
As a preferable scheme of the present invention, the clamping mechanism includes a protective housing, a first mounting hole, a cylinder, a moving rack, an intermittent gear, and two hooks, the protective housing is disposed on the right side of the hollow upright, the first mounting hole is disposed in the protective housing, the cylinder is fixedly connected to an upper inner wall of the protective housing, the moving rack is fixedly connected to an extension end of the cylinder, the intermittent gear is movably connected between front and rear inner walls of the protective housing through a hinge shaft, the hooks are two, the hooks are fixedly connected to surfaces of the intermittent gear, and the moving rack is engaged with the intermittent gear.
As a preferred embodiment of the present invention, the winding mechanism includes a T-shaped position-limiting rod, a first connecting member, a second fixing plate, a first rotating rod, a second servo motor, an L-shaped fixing frame, a second rotating rod, a first belt pulley, a first transmission belt, a steel cable, and a second connecting member, the T-shaped position-limiting rod is disposed on the right side of the hollow column, the first connecting member is sleeved on the surface of the T-shaped position-limiting rod, the second fixing plate is disposed on the right side of the hollow column, the first rotating rod is rotatably connected between the first connecting member and the second fixing plate, the second servo motor is fixedly connected to the front end of the first connecting member, the output end of the second servo motor movably penetrates through the front end of the first connecting member, the output end of the second servo motor is fixedly connected to the front end of the first rotating rod, the L-shaped fixing frame is fixedly connected to the front end of the second servo motor, the second connecting piece sets up to two, two the surface of first bull stick is located all to the cover of second connecting piece, the second bull stick rotates to be connected between two second connecting pieces, and the front end of second bull stick outwards extends, first belt pulley sets up to two, two first belt pulley fixed connection is respectively in second bull stick and second servo motor's output surface, the surface of two first belt pulleys is located to first transmission belt cover, and two first belt pulleys pass through first drive belt transmission and connect, steel cable fixed connection is in the surface of first bull stick, and the surface of steel cable winding in first bull stick and second bull stick, protective housing fixed connection is in the other end of steel cable.
As a preferable scheme of the invention, the moving mechanism comprises an I-shaped beam, two sliding grooves, a first mounting groove, a fixed rack, a moving gear, two sliding holes, a first servo motor, a limit sliding plate, a first limit sliding block and two limit sliding blocks, the I-shaped beam is fixedly connected to the right end of the T-shaped sliding plate, the number of the second sliding grooves is four, every two second sliding grooves are arranged in one group, two groups of the second sliding grooves are respectively arranged at the upper end and the lower end of the I-shaped beam, the two groups of the second sliding grooves are symmetrically arranged, the first mounting groove is arranged at the right end of the I-shaped beam, the fixed rack is fixedly connected to the lower inner wall of the first mounting groove, the moving gear is meshed and connected to the upper end of the fixed rack, the T-shaped limit rod is fixedly connected to the center of the front end of the moving gear, the two sliding holes are arranged, and the two sliding holes are respectively arranged at the front end and the back end of the I-shaped beam, and two slide holes all are linked together with first mounting groove, first servo motor's output fixed connection is located in the rear end center of removal gear, first servo motor's output is in the slide hole phase-match, spacing slide sets up to two, two spacing slide difference fixed connection is in both ends about first servo motor, first spacing slider sets up to two, first spacing slider fixed connection is in the upper end of spacing slide, and first spacing slider sliding connection is in the second spout that is located the upside, second spacing slider sets up to two, I-shaped crossbeam fixed connection is in the lower extreme of spacing slide, and second spacing slider sliding connection is in the second spout that is located the downside.
As a preferable scheme of the invention, the lifting mechanism comprises two first screw rods, two third servo motors, two driving belt pulleys, two driven belt pulleys, two connecting belts, two arc-shaped mounting blocks and four nuts, the first screw rods are fixedly connected to the surface of the hollow upright post, the first screw rods are rotatably connected to the lower ends of the arc-shaped mounting blocks, the third servo motors are arranged on the right side of the hollow upright post, the driving belt pulleys are fixedly connected to the surface of the output end of the third servo motors, the driven belt pulleys are fixedly connected to the surface of the first screw rods, the connecting belts are sleeved on the surfaces of the driving belt pulleys and the driven belt pulleys, the driving belt pulleys and the driven belt pulleys are in transmission connection through the connecting belts, and the number of the nuts is four, the four nuts are respectively in threaded connection with the surfaces of the two first screws.
As a preferred scheme of the present invention, the first supporting mechanism includes two mounting sleeves, two supporting frames, two first driven gears, two fourth servo motors, two first driving gears, two second driven gears, two second servo motors, two first driving gears, two second fixed plates, and two U-shaped fixing frames, the mounting sleeves are rotatably connected between two nuts, the mounting sleeves are sleeved on the surface of the first screw rod, the supporting frames are fixedly connected to the surface of the mounting sleeves, the first driven gears are fixedly connected to the surface of the mounting sleeves, the mounting sleeves are located at the lower sides of the supporting frames, the third fixing plates are fixedly connected to the surfaces of the nuts, the U-shaped fixing frames are fixedly connected to the lower ends of the third fixing plates, and the fourth servo motors are fixedly connected to the U-shaped fixing frames, the output end of the fourth servo motor movably penetrates through the lower end of the third fixing plate, the first driving gear is fixedly connected to the surface of the output end of the third fixing plate, and the first driving gear is meshed with the first driven gear.
As a preferable scheme of the present invention, the angle adjusting mechanism includes a driving motor, a second driving gear, a second driven gear and a T-shaped cylinder, the driving motor is disposed at a lower side of the hollow column, the second driving gear is fixedly connected to an output end surface of the driving motor, the second driven gear is engaged with the second driving gear, the T-shaped cylinder is disposed in the second driven gear, the second driven gear is fixedly connected to a surface of the T-shaped cylinder, the hollow column and the hydraulic cylinder are both fixedly connected to an upper end of the T-shaped cylinder, both the first screws are rotatably connected to an upper end of the second driven gear, the bottom supporting mechanism includes a base, a second mounting groove, a second mounting hole, a limiting ring, a fourth fixing plate and a third mounting hole, the base is disposed at a lower side of the hollow column, the second mounting groove is opened in the base, the second mounting hole is formed in the second mounting groove, the limiting ring is fixedly connected into the base, the limiting ring is located on the lower side of the second mounting groove, the fourth fixing plate is fixedly connected onto the surface of the hollow stand column, the driving motor is fixedly connected to the upper end of the fourth fixing plate, the number of the third mounting holes is four, the third mounting holes are formed in the base, the T-shaped cylinder is slidably connected into the second mounting groove, and the lower portion of the T-shaped cylinder is movably inserted into the limiting ring in a protruding mode.
As a preferred embodiment of the present invention, the second support mechanism includes a third rotating rod, a fifth servo motor, a second pulley, a second transmission belt, a third driving gear, a fourth rotating rod, a third driven gear, a mounting plate, threaded holes, a second screw, a limiting block, a balancing weight, a third pulley, and a third transmission belt, the third rotating rod is rotatably connected between the base and the second driven gear, the fifth servo motor is fixedly connected to a lower end of the limiting ring, the number of the second pulleys is two, the two second pulleys are respectively and fixedly connected to a surface of the third rotating rod and a surface of an output end of the fifth servo motor, the second transmission belt is sleeved on surfaces of the two second pulleys, the two second pulleys are in transmission connection via the second transmission belt, the third driving gear is fixedly connected to a surface of the third rotating rod, and a third driving gear is positioned at the lower side of the second belt pulley, the fourth rotating rod, a third driven gear, a second screw rod, a limiting block, a balancing weight and a third transmission belt are all set to be four, the mounting plate, a threaded hole and a third belt pulley are all set to be eight, the fourth rotating rod is rotatably connected between the base and the limiting ring, the third driven gear is fixedly connected with the surface of the fourth rotating rod, the third driving gear and the third driven gear are meshed, the mounting plate is fixedly connected with the upper and lower inner walls of the third mounting hole, the threaded hole is formed in the upper end of the mounting plate, the second screw rod is in threaded connection with the threaded hole, the limiting block and the balancing weight are respectively and fixedly connected with the upper and lower ends of the second screw rod, the third belt pulley is respectively and fixedly connected with the surfaces of the fourth rotating rod and the second screw rod, and the third transmission belt is sleeved on the surfaces of the two third belt pulleys, and the two third belt pulleys are in transmission connection through a third transmission belt.
A cantilever crane for workshop hoisting and a using method thereof comprise the following steps:
s1, when the object needs to be hooked:
s11, adjusting the position of the hook: the first servo motor is started to rotate forwards, the movable gear is driven to rotate forwards by the forward rotation of the first servo motor, the movable gear is driven to move rightwards by the forward rotation of the movable gear due to the fact that the fixed rack is meshed with the movable gear, the movable gear moves rightwards to enable the T-shaped limiting rod to slide in the sliding hole, the limiting sliding plate is driven to slide rightwards by the rightward movement of the movable gear, the second fixing plate moves rightwards by the rightward movement of the limiting sliding plate, the first servo motor is closed when the hook claw moves to a proper position, and therefore the position of the hook claw is adjusted, and the object can be hooked conveniently;
s12, paying off: after the position of the hook claw is adjusted, a second servo motor is started to rotate reversely, the output end of the second servo motor is rotated reversely by the reverse rotation of the second servo motor, the output end of the second servo motor is rotated reversely to simultaneously rotate a first rotating rod and a second rotating rod, the steel rope moves downwards by the reverse rotation of the first rotating rod and the second rotating rod, the hook claw moves downwards by the downward movement of the steel rope, and the second servo motor is closed when the hook claw moves downwards to an article to be hooked;
s13, taking the object: starting the cylinder to contract, wherein the movable rack moves upwards due to the contraction of the cylinder, the movable rack moves upwards due to the engagement of the movable rack and the two intermittent gears, so that the surfaces of the two intermittent gears drive the hooks to move towards the end close to each other, when the two hooks hook and stabilize the object, the cylinder set is closed, the hooking of the object is finally completed, and then the object can be moved by reversely operating the steps;
s14, when the cantilever needs to be angularly adjusted: the driving motor is started to rotate, the rotation of the driving motor drives the second driving gear to rotate, the rotation of the second driving gear enables the second driven gear to rotate, the rotation of the second driven gear drives the hollow upright post and the hydraulic cylinder to rotate through the rotation of the second driven gear, and therefore the cantilever rotates;
s2, first support protection:
s21, height adjustment of the support frame: the third servo motor is started to rotate forwards, the driving belt pulley is rotated forwards by the forward rotation of the third servo motor, the driven belt pulley is driven to rotate forwards by the forward rotation of the driving belt pulley through the connecting belt, the first screw rod is rotated forwards by the forward rotation of the driven belt pulley, and the nut moves upwards on the surface of the first screw rod by the forward rotation of the first screw rod;
s3, direct angle adjustment: the fourth servo motor is started to rotate reversely, the first driving gear is driven to rotate reversely by the fourth servo motor in a reverse rotation mode, the first driven gear rotates forwards by the first driving gear in a reverse rotation mode, the mounting sleeve moves towards the opposite side by the first driven gear in a forward rotation mode, the fourth servo motor is closed when the supporting frame is located on the lower side of the I-shaped cross beam, and finally supporting protection of the I-shaped cross beam is achieved;
s4, second support protection: the fifth servo motor is started to rotate positively, the second belt pulley is rotated positively by the positive rotation of the fifth servo motor, the third rotating rod is driven to rotate positively by the positive rotation of the second belt pulley through the second transmission belt, the third driving gear is driven to rotate positively by the positive rotation of the third rotating rod, the third driving gear is meshed with the third driven gear, so that the third driven gear is driven to rotate reversely by the forward rotation of the third driving gear, the fourth rotating rod is driven to rotate reversely by the reverse rotation of the third driven gear, the third belt pulley is driven to rotate reversely by the reverse rotation of the fourth rotating rod, the second screw rod is driven to rotate reversely by the reverse rotation of the third belt pulley through the third transmission belt, the second screw rod moves downwards in the threaded hole by the reverse rotation of the second screw rod, the base is supported by the balancing weight through the downward movement of the second screw rod, when the second screw rod moves downwards to a proper position, the fifth servo motor is closed, and finally the support protection of the base is finished.
Compared with the prior art, the invention has the beneficial effects that:
1. in the scheme, the hollow upright column is used for protecting the hydraulic cylinder, the hydraulic cylinder is used for driving the moving mechanism to slide through the auxiliary sliding mechanism, the auxiliary sliding mechanism is used for driving the moving mechanism to slide, the moving mechanism is used for adjusting the position of the hook jaw, the winding mechanism is used for winding and unwinding the clamping mechanism, the clamping mechanism is used for hooking and taking workshop articles, the lifting mechanism is used for lifting the first supporting mechanism, the first supporting mechanism can be synchronously adjusted to lift when the moving mechanism lifts along with the auxiliary sliding mechanism, so that the moving mechanism is prevented from colliding with the first supporting mechanism, the moving mechanism and the first supporting mechanism are further protected, the first supporting mechanism is used for supporting the moving mechanism, and the stability of the crane is improved when the articles are hooked, bottom sprag mechanism is for the convenience of holding angle adjustment mechanism, and angle adjustment mechanism is for the convenience of fixing hollow column and pneumatic cylinder, and second supporting mechanism is for the convenience of supporting bottom sprag mechanism, and then improves the stability of hoist when the operation, prevents the unstable condition of hoist focus when adjusting cantilever and hook, has improved the security of hoist.
2. In the scheme, the first sliding groove is used for facilitating the sliding of the T-shaped sliding block and the T-shaped sliding plate, the arc-shaped groove is arranged for facilitating the rotation of the first driven gear, the first fixing plate is used for facilitating the fixing of the third servo motor, the hydraulic cylinder is used for facilitating the lifting of the auxiliary sliding block, the auxiliary sliding block is used for facilitating the fixing of the T-shaped sliding block and the T-shaped sliding plate, the T-shaped sliding block is used for facilitating the sliding of the auxiliary sliding block, the T-shaped sliding plate is used for facilitating the connection of an I-shaped cross beam, the protective shell is used for facilitating the fixing of the cylinder, the first mounting hole is used for facilitating the movable penetration of the hook, the cylinder is used for facilitating the fixing of the movable rack, the movable rack is used for facilitating the meshing of the movable rack with the intermittent gear, the intermittent gear is used for facilitating the movement of the movable rack to drive the hook to move, the hook is used for facilitating the hooking of articles, and the T-shaped limiting rod is used for facilitating the sleeving of the first connecting piece, the first connecting piece is used for facilitating installation of the second servo motor, the second fixing plate is used for facilitating rotation connection of the first rotating rod, the first rotating rod is used for facilitating sleeving of two second connecting pieces, the second connecting piece is used for facilitating rotation connection of the second rotating rod, the second servo motor is used for facilitating driving of the first rotating rod to rotate, the L-shaped fixing frame is used for facilitating further fixing of the second servo motor, the second rotating rod is used for facilitating sleeving of the steel rope, the first belt pulley and the first transmission belt are used for facilitating driving of the second rotating rod to rotate through the second servo motor, the steel rope is used for facilitating fixing of the protective shell, the I-shaped cross beam is used for facilitating establishment of the second sliding groove, the second sliding groove is used for facilitating sliding of the first limiting sliding block and the second limiting sliding block, establishment of the first mounting groove is used for facilitating installation of the fixed rack, and the fixed rack is used for facilitating meshing with the moving gear, the movable gear is for facilitating fixed first servo motor, mutually supports through first servo motor and fixed rack and makes movable gear remove, and the slide opening is for facilitating the gliding of T shape gag lever post, and first servo motor is for facilitating the drive movable gear pivoted, and spacing slide is for facilitating fixed first servo motor, and first spacing slider is for carrying on spacingly to spacing slide, and second spacing slider is for facilitating the fixed second fixed plate.
3. In the scheme, the first screw rod is convenient for connecting a nut in a threaded manner, the third servo motor is convenient for fixing the driving belt pulley, the driving belt pulley and the driven belt pulley are convenient for being matched with a connecting belt, the connecting belt is convenient for connecting the driving belt pulley and the driven belt pulley in a transmission manner, the arc-shaped mounting block is convenient for connecting the first screw rod in a rotating manner, the nut is convenient for connecting the mounting sleeve in a rotating manner, the mounting sleeve is convenient for sleeving the first screw rod, meanwhile, the supporting frame is convenient for fixing the supporting frame, the supporting frame is convenient for supporting the I-shaped cross beam, the third fixing plate is convenient for fixing the U-shaped fixing frame, the U-shaped fixing frame is convenient for supporting the fourth servo motor, the fourth servo motor is convenient for driving the first driving gear to rotate, the first driving gear is convenient for being meshed with the first driven gear, first driven gear is for the convenience of driving the installation sleeve pivoted, and then drive the support frame and rotate, the third bull stick is for the convenience of fixed third driving gear, fifth servo motor is for the convenience of driving second belt pulley pivoted, the second belt pulley is for the convenience of driving third bull stick pivoted through second driving belt, the third driving gear is for the convenience of meshing with third driven gear mutually, the fourth bull stick is for the convenience of fixed third belt pulley, the third driven gear is for the convenience of driving fourth bull stick pivoted, the mounting panel is for the convenience of chiseling the screw hole, the screw hole is for the convenience of second screw threaded connection, the second screw is for the convenience of fixed stopper and balancing weight, the stopper is for the convenience of spacing to the second screw, the balancing weight is for the convenience of supporting the base, the third belt pulley is for the convenience of mutually supporting with third driving belt, the third driving belt is connected with the third belt pulley in a transmission mode, so that the situation that the center of gravity of the crane is unstable when the angle of the cantilever and the hook jaw is adjusted can be finally achieved, and the safety of the crane is improved.
Drawings
The accompanying drawings, which are included to provide a further understanding of the invention and are incorporated in and constitute a part of this specification, illustrate embodiments of the invention and together with the description serve to explain the principles of the invention and not to limit the invention. In the drawings:
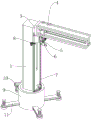
FIG. 1 is an exploded view of the present invention;
FIG. 2 is an overall perspective view of the present invention;
FIG. 3 is a structural view of the hollow pillar of the present invention;
FIG. 4 is a structural view of an auxiliary slide mechanism of the present invention;
FIG. 5 is a front view of the moving mechanism and the winding mechanism of the present invention;
FIG. 6 is a bottom view of the moving mechanism and the winding mechanism of the present invention;
FIG. 7 is a perspective view of a clamping mechanism of the present invention;
FIG. 8 is an internal structural view of a clamping mechanism according to the present invention;
FIG. 9 is a structural view of a lifting mechanism of the present invention;
FIG. 10 is a structural view of a first support mechanism of the present invention;
FIG. 11 is a partial cross-sectional view of the present invention;
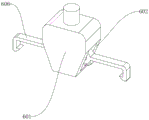
FIG. 12 is a structural view of the bottom support mechanism of the present invention;
FIG. 13 is a partial structural view of an angle adjusting mechanism of the present invention;
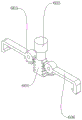
fig. 14 is a structural view of a second support mechanism in the present invention.
In the figure: 1. a hollow upright post; 101. a first chute; 102. an arc-shaped slot; 103. a first fixing plate; 2. a hydraulic cylinder; 3. an auxiliary slide mechanism; 301. an auxiliary slide block; 302. a T-shaped slider; 303. a T-shaped slide plate; 4. a moving mechanism; 401. an I-beam; 402. a second chute; 403. a first mounting groove; 404. fixing a rack; 405. a moving gear; 406. a slide hole; 407. a first servo motor; 408. a limiting sliding plate; 409. a first limit slide block; 410. a second limit slide block; 5. a winding mechanism; 501. a T-shaped limiting rod; 502. a first connecting member; 503. a second fixing plate; 504. a first rotating lever; 505. a second servo motor; 506. an L-shaped fixing frame; 507. a second rotating rod; 508. a first pulley; 509. a first drive belt; 510. a steel cord; 511. a second connecting member; 6. a clamping mechanism; 601. a protective shell; 602. a first mounting hole; 603. a cylinder; 604. moving the rack; 605. an intermittent gear; 606. a hook claw; 7. a lifting mechanism; 701. a first screw; 702. a third servo motor; 703. a drive pulley; 704. a driven pulley; 705. connecting a belt; 706. an arc-shaped mounting block; 707. a nut; 8. a first support mechanism; 801. installing a sleeve; 802. a support frame; 803. a first driven gear; 804. a fourth servo motor; 805. a first drive gear; 806. a third fixing plate; 807. a U-shaped fixing frame; 9. a bottom support mechanism; 901. a base; 902. a second mounting groove; 903. a second mounting hole; 904. a limiting ring; 905. a fourth fixing plate; 906. a third mounting hole; 10. an angle adjusting mechanism; 1001. a drive motor; 1002. a second driving gear; 1003. a second driven gear; 1004. a T-shaped cylinder; 11. a second support mechanism; 1101. a third rotating rod; 1102. a fifth servo motor; 1103. a second pulley; 1104. a second drive belt; 1105. a third driving gear; 1106. a fourth rotating rod; 1107. a third driven gear; 1108. mounting a plate; 1109. a threaded hole; 1110. a second screw; 1111. a limiting block; 1112. a balancing weight; 1113. a third belt pulley; 1114. a third drive belt.
Detailed Description
The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the drawings in the embodiments of the present invention, and it is obvious that the described embodiments are only a part of the embodiments of the present invention, and not all of the embodiments. All other embodiments, which can be derived by a person skilled in the art from the embodiments given herein without making any creative effort, shall fall within the protection scope of the present invention.
In the description of the present invention, it should be noted that the terms "upper", "lower", "inner", "outer", "top/bottom", and the like indicate orientations or positional relationships based on those shown in the drawings, and are only for convenience of description and simplification of description, but do not indicate or imply that the referred device or element must have a specific orientation, be constructed in a specific orientation, and be operated, and thus should not be construed as limiting the present invention. Furthermore, the terms "first" and "second" are used for descriptive purposes only and are not to be construed as indicating or implying relative importance.
In the description of the present invention, it should be noted that, unless otherwise explicitly specified or limited, the terms "mounted," "disposed," "sleeved/connected," "connected," and the like are to be construed broadly, e.g., "connected," which may be fixedly connected, detachably connected, or integrally connected; can be mechanically or electrically connected; they may be connected directly or indirectly through intervening media, or they may be interconnected between two elements. The specific meanings of the above terms in the present invention can be understood in specific cases to those skilled in the art.
Examples
Referring to fig. 1-14, the technical solution provided in this embodiment is as follows:
a cantilever crane for workshop hoisting and a using method thereof comprise:
a hollow upright column 1;
the hydraulic cylinder 2 is arranged in the hollow upright post 1;
the auxiliary sliding mechanism 3 is arranged in the hollow upright post 1, the auxiliary sliding mechanism 3 is connected with the hydraulic cylinder 2, and the auxiliary sliding mechanism 3 is lifted through the hydraulic cylinder 2;
the clamping mechanism 6 is arranged on the right side of the hollow upright post 1, and the clamping mechanism 6 is used for clamping an article;
the winding mechanism 5 is arranged on the upper side of the clamping mechanism 6, the winding mechanism 5 is connected with the clamping mechanism 6, and the winding mechanism 5 is used for realizing the winding and unwinding of the clamping mechanism 6;
the moving mechanism 4 is arranged on the right side of the hollow upright post 1, the moving mechanism 4 is connected with the winding mechanism 5, and the moving mechanism 4 is used for moving the winding mechanism 5;
the lifting mechanism 7 is arranged on the right side of the hollow upright post 1, and the lifting mechanism 7 is positioned on the lower side of the moving mechanism 4;
the first supporting mechanism 8 is arranged on the right side of the hollow upright post 1, and the first supporting mechanism 8 is used for realizing the supporting of the moving mechanism 4;
the angle adjusting mechanism 10 is arranged at the lower side of the hollow upright post 1, and the angle adjusting mechanism 10 is used for realizing the support of the hollow upright post 1 and the hydraulic cylinder 2;
the bottom supporting mechanism 9 is arranged at the lower side of the hollow upright post 1, the angle adjusting mechanism 10 is positioned in the bottom supporting mechanism 9, and the bottom supporting mechanism 9 is used for accommodating the angle adjusting mechanism 10;
and the second supporting mechanism 11, the second supporting mechanism 11 is arranged at the lower side of the angle adjusting mechanism 10, and the second supporting mechanism 11 is used for realizing the support of the bottom supporting mechanism 9.
In the embodiment of the invention, the hollow upright column 1 is used for protecting the hydraulic cylinder 2, the hydraulic cylinder 2 is used for driving the moving mechanism 4 to slide through the auxiliary sliding mechanism 3, the auxiliary sliding mechanism 3 is used for driving the moving mechanism 4 to slide, the moving mechanism 4 is used for adjusting the position of a hook, the winding mechanism 5 is used for collecting and releasing the clamping mechanism 6, the clamping mechanism 6 is used for hooking objects in a workshop, the lifting mechanism 7 is used for lifting the first supporting mechanism 8, when the moving mechanism 4 is lifted along with the auxiliary sliding mechanism 3, the first supporting mechanism 8 can be synchronously adjusted to lift, so that the moving mechanism 4 is prevented from colliding with the first supporting mechanism 8, the moving mechanism 4 and the first supporting mechanism 8 are further protected, the first supporting mechanism 8 is used for supporting the moving mechanism 4, the crane has the advantages that the stability of the crane is improved when the object is hooked, the bottom supporting mechanism 9 is used for accommodating the angle adjusting mechanism 10, the angle adjusting mechanism 10 is used for fixing the hollow upright post 1 and the hydraulic cylinder 2, the second supporting mechanism 11 is used for supporting the bottom supporting mechanism 9, the stability of the crane in operation is further improved, the unstable gravity center of the crane is prevented from occurring when the cantilever and the hook claw are adjusted, and the safety of the crane is improved.
Specifically, referring to fig. 1-4, the hollow upright 1 includes two first sliding grooves 101, two arc-shaped grooves 102 and two first fixing plates 103, the two first sliding grooves 101 are respectively disposed at the left and right ends of the hollow upright 1, the two arc-shaped grooves 102 are both disposed at the lower end of the hollow upright 1, the first fixing plate 103 is fixedly connected to the right end of the hollow upright 1, the hydraulic cylinder 2 is disposed in the hollow upright 1, the auxiliary sliding mechanism 3 includes an auxiliary sliding block 301, a T-shaped sliding block 302 and a T-shaped sliding plate 303, the auxiliary sliding block 301 is slidably connected in the hollow upright 1, the auxiliary sliding block 301 is fixedly connected to the extending end of the hydraulic cylinder 2, the T-shaped sliding block 302 is fixedly connected to the left end of the auxiliary sliding block 301, the T-shaped sliding block 302 is slidably connected in the first sliding groove 101 on the left side, the T-shaped sliding plate 303 is fixedly connected to the right end of the auxiliary sliding block 301, and the T-shaped sliding plate 303 is slidably connected in the first sliding chute 101 on the right side.
In the embodiment of the present invention, the first sliding groove 101 is for facilitating the sliding of the T-shaped slider 302 and the T-shaped sliding plate 303, the arc-shaped groove 102 is for facilitating the rotation of the first driven gear 803, the first fixing plate 103 is for facilitating the fixing of the third servo motor 702, the hydraulic cylinder 2 is for facilitating the lifting of the auxiliary slider 301, the auxiliary slider 301 is for facilitating the fixing of the T-shaped slider 302 and the T-shaped sliding plate 303, the T-shaped slider 302 is for facilitating the sliding of the auxiliary slider 301, and the T-shaped sliding plate 303 is for facilitating the connection of the i-shaped cross beam 401.
Specifically, referring to fig. 7-8, the clamping mechanism 6 includes a protective housing 601, a first mounting hole 602, an air cylinder 603, a moving rack 604, an intermittent gear 605 and two hooks 606, the protective housing 601 is disposed on the right side of the hollow upright column 1, the first mounting hole 602 is disposed in the protective housing 601, the air cylinder 603 is fixedly connected to the upper inner wall of the protective housing 601, the moving rack 604 is fixedly connected to the extending end of the air cylinder 603, the number of the intermittent gears 605 is two, the intermittent gear 605 is movably crossed between the front and rear inner walls of the protective housing 601 through a hinge, the number of the hooks 606 is two, the hooks 606 are fixedly connected to the surface of the intermittent gear 605, and the moving rack 604 is engaged with the intermittent gear 605.
In the embodiment of the invention, the protective shell 601 is used for fixing the air cylinder 603, the first mounting hole 602 is used for allowing the hook 606 to penetrate through, the air cylinder 603 is used for fixing the movable rack 604, the movable rack 604 is used for being meshed with the intermittent gear 605, the intermittent gear 605 is used for driving the hook 606 to move through the movement of the movable rack 604, and the hook 606 is used for hooking the article.
Specifically, referring to fig. 5-6, the winding mechanism 5 includes a T-shaped limiting rod 501, a first connecting member 502, a second fixing plate 503, a first rotating rod 504, a second servo motor 505, an L-shaped fixing frame 506, a second rotating rod 507, a first belt pulley 508, a first transmission belt 509, a steel cable 510 and a second connecting member 511, the T-shaped limiting rod 501 is disposed on the right side of the hollow upright post 1, the first connecting member 502 is sleeved on the surface of the T-shaped limiting rod 501, the second fixing plate 503 is disposed on the right side of the hollow upright post, the first rotating rod 504 is rotatably connected between the first connecting member 502 and the second fixing plate 503, the second servo motor 505 is fixedly connected to the front end of the first connecting member 502, the output end of the second servo motor 505 movably penetrates the front end of the first connecting member 502, the output end of the second servo motor 505 is fixedly connected to the front end of the first rotating rod 504, the L-shaped fixing frame 506 is fixedly connected to the front end of the second servo motor 505, the second connecting members 511 are two, the two second connecting members 511 are all sleeved on the surface of the first rotating rod 504, the second rotating rod 507 is rotatably connected between the two second connecting members 511, the front end of the second rotating rod 507 extends outwards, the first belt pulleys 508 are two, the two first belt pulleys 508 are respectively and fixedly connected to the output end surfaces of the second rotating rod 507 and the second servo motor 505, the first transmission belt 509 is sleeved on the surfaces of the two first belt pulleys 508, the two first belt pulleys 508 are in transmission connection through the first transmission belt 509, the steel rope 510 is fixedly connected to the surface of the first rotating rod 504, the steel rope 510 is wound on the surfaces of the first rotating rod 504 and the second rotating rod 507, and the protective shell 601 is fixedly connected to the other end of the steel rope 510.
In the embodiment of the invention, the T-shaped limiting rod 501 is for facilitating sleeving the first connecting member 502, the first connecting member 502 is for facilitating installation of the second servo motor 505, the second fixing plate 503 is for facilitating rotational connection with the first rotating rod 504, the first rotating rod 504 is for facilitating sleeving of two second connecting members 511, the second connecting member 511 is for facilitating rotational connection with the second rotating rod 507, the second servo motor 505 is for facilitating driving of the first rotating rod 504 to rotate, the L-shaped fixing frame 506 is for facilitating further fixing of the second servo motor 505, the second rotating rod 507 is for facilitating sleeving of the steel cable 510, the first pulley 508 and the first transmission belt 509 are for facilitating driving of the second rotating rod 507 to rotate through the second servo motor 505, and the steel cable 510 is for facilitating fixing of the protective shell 601.
Specifically, referring to fig. 5 to 6, the moving mechanism 4 includes an i-beam 401, two sliding grooves 402, a first mounting groove 403, two fixed racks 404, a moving gear 405, a sliding hole 406, a first servo motor 407, a limit sliding plate 408, a first limit slider 409 and two limit sliders 410, the i-beam 401 is fixedly connected to the right end of the T-shaped sliding plate 303, the number of the second sliding grooves 402 is four, every two second sliding grooves 402 are provided as one group, two groups of the second sliding grooves 402 are respectively provided at the upper end and the lower end of the i-beam 401, the two groups of the second sliding grooves 402 are symmetrically provided, the first mounting groove 403 is provided at the right end of the i-beam 401, the fixed racks 404 are fixedly connected to the lower inner wall of the first mounting groove 403, the moving gear 405 is engaged with the upper end of the fixed racks 404, the T-shaped limit rod 501 is fixedly connected to the center of the front end of the moving gear 405, the, two both ends around I-beam 401 are seted up respectively to slide opening 406, and two slide openings 406 all are linked together with first mounting groove 403, first servo motor 407's output fixed connection is in the rear end center department of moving gear 405, first servo motor 407's output is in slide opening 406 phase-match, spacing slide 408 sets up to two, two spacing slide 408 are fixed connection respectively in both ends about first servo motor 407, first spacing slider 409 sets up to two, first spacing slider 409 fixed connection is in the upper end of spacing slide 408, and first spacing slider 409 sliding connection is in the second spout 402 that is located the upside, second spacing slider 410 sets up to two, I-beam 401 fixed connection is in the lower extreme of spacing slide 408, and second downside spacing slider 410 sliding connection is in being located second spout 402.
In the embodiment of the present invention, the i-beam 401 is for conveniently opening the second sliding slot 402, the second sliding slot 402 is for conveniently sliding the first position-limiting slider 409 and the second position-limiting slider 410, the first installation slot 403 is for conveniently installing the fixed rack 404, the fixed rack 404 is for conveniently meshing with the moving gear 405, the moving gear 405 is for conveniently fixing the first servo motor 407, the movable gear 405 is moved by the mutual cooperation of the first servo motor 407 and the fixed rack 404, the sliding hole 406 is for the convenience of sliding the T-shaped limiting rod 501, the first servo motor 407 is for the convenience of driving the movable gear 405 to rotate, the limiting slide plate 408 is for the convenience of fixing the first servo motor 407, the first limiting slide block 409 is for limiting the limiting slide plate 408, and the second limiting slide block 410 is for the convenience of fixing the second fixing plate 503.
Specifically, referring to fig. 9, the lifting mechanism 7 includes a first screw 701, a third servo motor 702, a driving pulley 703, a driven pulley 704, a connecting belt 705, an arc-shaped mounting block 706 and nuts 707, two of the first screw 701, the driving pulley 703, the driven pulley 704, the connecting belt 705 and the arc-shaped mounting block 706 are disposed, the arc-shaped mounting block 706 is fixedly connected to the surface of the hollow upright post 1, the first screw 701 is rotatably connected to the lower end of the arc-shaped mounting block 706, the third servo motor 702 is disposed on the right side of the hollow upright post 1, the driving pulley 703 is fixedly connected to the surface of the output end of the third servo motor 702, the driven pulley 704 is fixedly connected to the surface of the first screw 701, the connecting belt 705 is sleeved on the surfaces of the driving pulley 703 and the driven pulley 704, the driving pulley 703 and the driven pulley 704 are in transmission connection through the connecting belt 705, four nuts 707 are disposed, four nuts 707 are screwed to the surfaces of the two first screws 701, respectively.
In the embodiment of the present invention, the first screw 701 is screwed with the nut 707, the third servomotor 702 is used to fix the driving pulley 703, the driving pulley 703 and the driven pulley 704 are used to cooperate with the connecting belt 705, the connecting belt 705 is used to connect the driving pulley 703 and the driven pulley 704, the arc-shaped mounting block 706 is used to connect the first screw 701 rotatably, and the nut 707 is used to connect the mounting sleeve 801 rotatably.
Specifically, referring to fig. 9-10, the first supporting mechanism 8 includes two mounting sleeves 801, two supporting frames 802, two first driven gears 803, two fourth servo motors 804, two first driving gears 805, two third fixing plates 806, and two U-shaped fixing frames 807, the two mounting sleeves 801, the two supporting frames 802, the two first driven gears 803, the two fourth servo motors 804, the two first driving gears 805, the two third fixing plates 806, and the two U-shaped fixing frames 807, the mounting sleeves 801 are rotatably connected between the two nuts 707, the mounting sleeves 801 are sleeved on the surface of the first screw 701, the supporting frames 802 are fixedly connected to the surface of the mounting sleeves 801, the first driven gears 803 are fixedly connected to the surface of the mounting sleeves 801, the mounting sleeves 801 are located at the lower sides of the supporting frames 802, the three fixing plates 806 are fixedly connected to the surfaces of the nuts 707, the U-shaped fixing frames 807 are fixedly connected to the lower ends of the three fixing plates 806, the fourth servo motor 804 is fixedly connected in the U-shaped fixing frame 807, an output end of the fourth servo motor 804 movably penetrates through a lower end of the third fixing plate 806, the first driving gear 805 is fixedly connected to an output end surface of the third fixing plate 806, and the first driving gear 805 is engaged with the first driven gear 803.
In the embodiment of the invention, the mounting sleeve 801 is convenient to be sleeved on the first screw 701, and is also convenient to fix the supporting frame 802, the supporting frame 802 is convenient to support the i-beam 401, the third fixing plate 806 is convenient to fix the U-shaped fixing frame 807, the U-shaped fixing frame 807 is convenient to support the fourth servo motor 804, the fourth servo motor 804 is convenient to drive the first driving gear 805 to rotate, the first driving gear 805 is convenient to be meshed with the first driven gear 803, and the first driven gear 803 is convenient to drive the mounting sleeve 801 to rotate, so as to drive the supporting frame 802 to rotate.
Specifically, referring to fig. 11-13, the angle adjusting mechanism 10 includes a driving motor 1001, a second driving gear 1002, a second driven gear 1003 and a T-shaped cylinder 1004, the driving motor 1001 is disposed at the lower side of the hollow upright 1, the second driving gear 1002 is fixedly connected to the surface of the output end of the driving motor 1001, the second driven gear 1003 is engaged with the second driving gear 1002, the T-shaped cylinder 1004 is disposed in the second driven gear 1003, the second driven gear 1003 is fixedly connected to the surface of the T-shaped cylinder 1004, the hollow upright 1 and the hydraulic cylinder 2 are both fixedly connected to the upper end of the T-shaped cylinder 1004, the two first screws 701 are both rotatably connected to the upper end of the second driven gear 1003, the bottom supporting mechanism 9 includes a base 901, a second mounting groove 902, a second mounting hole 903, a limiting ring 904, a fourth fixing plate 905 and a third mounting hole 906, the base 901 is disposed at the lower side of the hollow upright 1, second mounting groove 902 is seted up in base 901, second mounting hole 903 is seted up in second mounting groove 902, spacing ring 904 fixed connection is in base 901, spacing ring 904 is located the downside of second mounting groove 902, fourth fixed plate 905 fixed connection is in the surface of hollow upright 1, and driving motor 1001 fixed connection is in the upper end of fourth fixed plate 905, third mounting hole 906 sets up to four, four third mounting holes 906 are all seted up in base 901, in T shape cylinder 1004 sliding connection second mounting groove 902, and the protruding activity of lower part of T shape cylinder 1004 is pegged graft in spacing ring 904.
In the embodiment of the present invention, the driving motor 1001 is for driving the second driving gear 1002 to rotate, the second driving gear 1002 is for driving the second driven gear 1003 to rotate, the second driven gear 1003 is for driving the T-shaped cylinder 1004 to rotate, the hollow upright 1 and the hydraulic cylinder 2 are driven to rotate by the rotation of the T-shaped cylinder 1004, the base 901 is for opening the second mounting groove 902, the second mounting groove 902 is for accommodating the second driven gear 1003, the second mounting hole 903 is for engaging the second driving gear 1002 with the second driven gear 1003, the limiting ring 904 is for supporting the T-shaped cylinder 1004, and the fourth fixing plate 905 is for supporting the driving motor 1001.
Specifically, referring to fig. 12 to 14, the second support mechanism 11 includes a third rotating rod 1101, a fifth servo motor 1102, a second pulley 1103, a second transmission belt 1104, a third driving gear 1105, a fourth rotating rod 1106, a third driven gear 1107, a mounting plate 1108, a threaded hole 1109, a second screw 1110, a limiting block 1111, a counterweight 1112, a third pulley 1113 and a third transmission belt 1114, the third rotating rod 1101 is rotatably connected between the base 901 and the second driven gear 1003, the fifth servo motor 1102 is fixedly connected to the lower end of the limiting ring 904, the second pulleys 1103 are provided in two numbers, the two second pulleys 1103 are respectively and fixedly connected to the surface of the third rotating rod 1101 and the surface of the output end of the fifth servo motor 1102, the second transmission belt is sleeved on the surfaces of the two second pulleys 1103, the two second pulleys 1103 are in transmission connection through the second transmission belt 1104, the third driving gear 1105 is fixedly connected to the surface of the third rotating rod 1101, and the third driving gear 1105 is located at the lower side of the second pulley 1103, the fourth rotating rod 1106, the third driven gear 1107, the second screw 1110, the limiting block 1111, the balancing weight 1112 and the third transmission belt 1114 are all set to four, the mounting plate 1108, the threaded hole 1109 and the third pulley 1113 are all set to eight, the fourth rotating rod 1106 is rotatably connected between the base 901 and the limiting ring 904, the third driven gear 1107 is fixedly connected to the surface of the fourth rotating rod 1106, the third driving gear 1105 is engaged with the third driven gear 1107, the mounting plate 1108 is fixedly connected to the upper and lower inner walls of the third mounting hole 906, the threaded hole 1109 is drilled at the upper end of the mounting plate 1108, the second screw 1110 is threadedly connected in the threaded hole 1109, the limiting blocks 1111 and the balancing weight 1112 are respectively fixedly connected to the upper and lower ends of the second screw 1110, the third pulley 1113 is respectively fixedly connected to the surfaces of the fourth rotating rod 1106 and the second screw 1110, the third transmission belt 1114 is sleeved on the surfaces of the two third pulleys 1113, and the two third pulleys 1113 are drivingly connected by a third drive belt 1114.
In the embodiment of the invention, the third rotating rod 1101 is for fixing the third driving gear 1105, the fifth servo motor 1102 is for driving the second pulley 1103 to rotate, the second pulley 1103 is for driving the third rotating rod 1101 to rotate by the second driving belt 1104, the third driving gear 1105 is for meshing with the third driven gear 1107, the fourth rotating rod 1106 is for fixing the third pulley 1113, the third driven gear 1107 is for driving the fourth rotating rod 1106 to rotate, the mounting plate 1108 is for chiseling the threaded hole 1109, the threaded hole 1109 is for screwing the second screw 1110, the second screw 1110 is for fixing the stopper 1111 and the counterweight 1112, the stopper 1111 is for limiting the second screw 1110, the counterweight 1112 is for supporting the base 901, the third pulley 1113 is for matching with the third driving belt 1114, third drive belt 1114 is connected for drive to third pulley 1113.
A cantilever crane for workshop hoisting and a using method thereof comprise the following steps:
s1, when the object needs to be hooked:
s11, adjusting the position of the hook: the first servo motor 407 is started to rotate forwards, the first servo motor 407 rotates forwards to drive the movable gear 405 to rotate forwards, the fixed rack 404 is meshed with the movable gear 405, so that the movable gear 405 rotates forwards to enable the movable gear 405 to move rightwards, the movable gear 405 moves rightwards to enable the T-shaped limiting rod 501 to slide in the sliding hole 406, the movable gear 405 moves rightwards to drive the limiting sliding plate 408 to slide rightwards, the limiting sliding plate 408 moves rightwards to enable the second fixing plate 503 to move rightwards, and the first servo motor 407 is closed when the hook claw moves to a proper position, so that the position of the hook claw is adjusted to facilitate hooking of an article;
s12, paying off: after the position of the hook claw is adjusted, starting a second servo motor 505 to rotate reversely, wherein the output end of the second servo motor 505 rotates reversely by the reverse rotation of the second servo motor 505, the output end of the second servo motor 505 rotates reversely simultaneously by a first rotating rod 504 and a second rotating rod 507, the steel rope 510 moves downwards by the reverse rotation of the first rotating rod 504 and the second rotating rod 507, the hook claw moves downwards by the downward movement of the steel rope 510, and the second servo motor 505 is closed when the hook claw moves downwards to an article to be hooked;
s13, taking the object: starting the air cylinder 603 to contract, wherein the movable rack 604 moves upwards due to the contraction of the air cylinder 603, the movable rack 604 moves upwards due to the engagement of the movable rack 604 and the two intermittent gears 605, so that the surfaces of the two intermittent gears 605 drive the hooks 606 to move towards the close end, when the two hooks 606 hook and take the articles stably, the air cylinder 603 is closed to gather, the hooking of the articles is finally completed, and then the steps are operated in the reverse direction to complete the movement of the articles;
s2, when the cantilever needs to be angularly adjusted: the driving motor 1001 is started to rotate, the rotation of the driving motor 1001 drives the second driving gear 1002 to rotate, the rotation of the second driving gear 1002 enables the second driven gear 1003 to rotate, the rotation of the second driven gear 1003 drives the hollow upright post 1 and the hydraulic cylinder 2 to rotate through the rotation of the second driven gear 1003, and therefore the cantilever rotates;
s3, first support protection:
s31, height adjustment of the support frame: the third servo motor 702 is started to rotate forwards, the driving belt pulley 703 is rotated forwards by the forward rotation of the third servo motor 702, the driven belt pulley 704 is driven to rotate forwards by the forward rotation of the driving belt pulley 703 through the connecting belt 705, the first screw 701 is rotated forwards by the forward rotation of the driven belt pulley 704, and the nut 707 moves upwards on the surface of the first screw 701 by the forward rotation of the first screw 701;
s32, direct angle adjustment: the fourth servo motor 804 is started to rotate reversely, the first driving gear 805 is driven to rotate reversely by the fourth servo motor 804, the first driven gear 803 is driven to rotate forwardly by the first driving gear 805, the mounting sleeve 801 moves towards the opposite side by the forward rotation of the first driven gear 803, the fourth servo motor 804 is closed when the support frame 802 is located on the lower side of the I-shaped cross beam 401, and finally the support protection of the I-shaped cross beam 401 is completed;
s4, second support protection: the fifth servo motor 1102 is started to rotate forwards, the second belt pulley 1103 is rotated forwards by the forward rotation of the fifth servo motor 1102, the third rotating rod 1101 is driven to rotate forwards by the forward rotation of the second belt pulley 1103 through the second transmission belt 1104, the third driving gear 1105 is driven to rotate forwards by the forward rotation of the third rotating rod 1101, the third driven gear 1107 is driven to rotate backwards by the forward rotation of the third driving gear 1105 since the third driving gear 1105 is meshed with the third driven gear 1107, the fourth rotating rod 1106 is rotated backwards by the reverse rotation of the third driven gear 1107, the third belt pulley 1113 is rotated backwards by the reverse rotation of the fourth rotating rod 1106, the second screw 1110 is driven to rotate backwards by the reverse rotation of the second screw 1110, the second screw 1110 moves downwards in the threaded hole 1109, the base 901 is supported by the balancing weight 1112 through the downward movement of the second screw 1110, and the fifth servo motor 1102 is closed when the second screw 1110 moves downwards to a proper position, eventually, the supporting and protecting of the base 901 is completed.
Finally, it should be noted that: although the present invention has been described in detail with reference to the foregoing embodiments, it will be apparent to those skilled in the art that changes may be made in the embodiments and/or equivalents thereof without departing from the spirit and scope of the invention. Any modification, equivalent replacement, or improvement made within the spirit and principle of the present invention should be included in the protection scope of the present invention.
Claims (4)
1. A jib crane for workshop hoisting, comprising:
a hollow upright (1);
the hydraulic cylinder (2), the said hydraulic cylinder (2) is set up in the hollow pillar (1);
the auxiliary sliding mechanism (3) is arranged in the hollow upright post (1), the auxiliary sliding mechanism (3) is connected with the hydraulic cylinder (2), and the auxiliary sliding mechanism (3) is lifted through the hydraulic cylinder (2);
the clamping mechanism (6) is arranged on the right side of the hollow upright post (1), and the clamping mechanism (6) is used for clamping an article;
the winding mechanism (5) is arranged on the upper side of the clamping mechanism (6), the winding mechanism (5) is connected with the clamping mechanism (6), and the winding mechanism (5) is used for winding and unwinding the clamping mechanism (6);
the moving mechanism (4) is arranged on the right side of the hollow upright post (1), the moving mechanism (4) is connected with the winding mechanism (5), and the moving mechanism (4) is used for moving the winding mechanism (5);
the lifting mechanism (7) is arranged on the right side of the hollow upright post (1), and the lifting mechanism (7) is positioned on the lower side of the moving mechanism (4);
the first supporting mechanism (8), the first supporting mechanism (8) is arranged on the right side of the hollow upright post (1), and the first supporting mechanism (8) is used for supporting the moving mechanism (4);
the angle adjusting mechanism (10) is arranged on the lower side of the hollow upright post (1), and the angle adjusting mechanism (10) is used for supporting the hollow upright post (1) and the hydraulic cylinder (2);
the bottom supporting mechanism (9), the bottom supporting mechanism (9) is arranged at the lower side of the hollow upright post (1), the angle adjusting mechanism (10) is positioned in the bottom supporting mechanism (9), and the bottom supporting mechanism (9) is used for accommodating the angle adjusting mechanism (10);
the second supporting mechanism (11), the second supporting mechanism (11) is arranged at the lower side of the angle adjusting mechanism (10), and the second supporting mechanism (11) is used for supporting the bottom supporting mechanism (9);
the hollow upright post (1) comprises a first sliding groove (101), arc-shaped grooves (102) and a first fixing plate (103), the number of the first sliding grooves (101) is two, the two first sliding grooves (101) are respectively arranged at the left end and the right end of the hollow upright post (1), the number of the arc-shaped grooves (102) is two, the two arc-shaped grooves (102) are arranged at the lower end of the hollow upright post (1), the first fixing plate (103) is fixedly connected at the right end of the hollow upright post (1), the hydraulic cylinder (2) is positioned in the hollow upright post (1), the auxiliary sliding mechanism (3) comprises an auxiliary sliding block (301), a T-shaped sliding block (302) and a T-shaped sliding plate (303), the auxiliary sliding block (301) is slidably connected in the hollow upright post (1), the auxiliary sliding block (301) is fixedly connected at the extending end of the hydraulic cylinder (2), and the T-shaped sliding block (302) is fixedly connected at the left end of the auxiliary sliding block (301), the T-shaped sliding block (302) is connected in the first sliding groove (101) on the left side in a sliding mode, the T-shaped sliding plate (303) is fixedly connected to the right end of the auxiliary sliding block (301), and the T-shaped sliding plate (303) is connected in the first sliding groove (101) on the right side in a sliding mode;
the clamping mechanism (6) comprises a protective shell (601), a first mounting hole (602), an air cylinder (603), a movable rack (604), an intermittent gear (605) and two hooks (606), wherein the protective shell (601) is arranged on the right side of the hollow upright post (1), the first mounting hole (602) is formed in the protective shell (601), the air cylinder (603) is fixedly connected to the upper inner wall of the protective shell (601), the movable rack (604) is fixedly connected to the extending end of the air cylinder (603), the number of the intermittent gears (605) is two, the intermittent gear (605) is movably crossed between the front inner wall and the rear inner wall of the protective shell (601) through a hinge shaft, the number of the hooks (606) is two, the hooks (606) are fixedly connected to the surface of the intermittent gear (605), and the movable rack (604) is meshed with the intermittent gear (605);
the winding mechanism (5) comprises a T-shaped limiting rod (501), a first connecting piece (502), a second fixing plate (503), a first rotating rod (504), a second servo motor (505), an L-shaped fixing frame (506), a second rotating rod (507), a first belt pulley (508), a first transmission belt (509), a steel rope (510) and a second connecting piece (511), wherein the T-shaped limiting rod (501) is arranged on the right side of the hollow upright post (1), the first connecting piece (502) is sleeved on the surface of the T-shaped limiting rod (501), the second fixing plate (503) is arranged on the right side of the hollow upright post (1), the first rotating rod (504) is rotatably connected between the first connecting piece (502) and the second fixing plate (503), the second servo motor (505) is fixedly connected to the front end of the first connecting piece (502), the output end of the second servo motor (505) movably penetrates through the front end of the first connecting piece (502), the output end of the second servo motor (505) is fixedly connected to the front end of the first rotating rod (504), the L-shaped fixing frame (506) is fixedly connected to the front end of the second servo motor (505), the number of the second connecting pieces (511) is two, the two second connecting pieces (511) are sleeved on the surface of the first rotating rod (504), the second rotating rod (507) is rotatably connected between the two second connecting pieces (511), the front end of the second rotating rod (507) extends outwards, the number of the first belt pulleys (508) is two, the two first belt pulleys (508) are respectively and fixedly connected to the surfaces of the output ends of the second rotating rod (507) and the second servo motor (505), the first transmission belt (509) is sleeved on the surfaces of the two first belt pulleys (508), and the two first belt pulleys (508) are in transmission connection through the first transmission belt (509), the steel rope (510) is fixedly connected to the surface of the first rotating rod (504), the steel rope (510) is wound on the surfaces of the first rotating rod (504) and the second rotating rod (507), and the protective shell (601) is fixedly connected to the other end of the steel rope (510);
the moving mechanism (4) comprises an I-shaped beam (401), second sliding grooves (402), first mounting grooves (403), fixed racks (404), moving gears (405), sliding holes (406), a first servo motor (407), limiting sliding plates (408), first limiting sliding blocks (409) and second limiting sliding blocks (410), the I-shaped beam (401) is fixedly connected to the right end of the T-shaped sliding plate (303), the number of the second sliding grooves (402) is four, every two second sliding grooves (402) are arranged into one group, the two groups of second sliding grooves (402) are respectively arranged at the upper end and the lower end of the I-shaped beam (401), the two groups of second sliding grooves (402) are symmetrically arranged, the first mounting grooves (403) are arranged at the right end of the I-shaped beam (401), the fixed racks (404) are fixedly connected to the lower inner wall of the first mounting groove (403), and the moving gears (405) are connected to the upper ends of the fixed racks (404), the T-shaped limiting rod (501) is fixedly connected to the center of the front end of the movable gear (405), the number of the sliding holes (406) is two, the two sliding holes (406) are respectively arranged at the front end and the rear end of the I-shaped cross beam (401), the two sliding holes (406) are communicated with the first mounting groove (403), the output end of the first servo motor (407) is fixedly connected to the center of the rear end of the movable gear (405), the output end of the first servo motor (407) is matched with the sliding holes (406), the number of the limiting sliding plates (408) is two, the two limiting sliding plates (408) are respectively fixedly connected to the left end and the right end of the first servo motor (407), the number of the first limiting sliding blocks (409) is two, the first limiting sliding blocks (409) are fixedly connected to the upper ends of the limiting sliding plates (408), and the first limiting sliding blocks (409) are slidably connected to the second sliding grooves (402) positioned on the upper side, the number of the second limiting sliding blocks (410) is two, the I-shaped cross beam (401) is fixedly connected to the lower end of the limiting sliding plate (408), and the second limiting sliding blocks (410) are connected in the second sliding grooves (402) on the lower side in a sliding mode;
the lifting mechanism (7) comprises a first screw (701), a third servo motor (702), a driving belt pulley (703), a driven belt pulley (704), a connecting belt (705), an arc-shaped mounting block (706) and a nut (707), the first screw (701), the driving belt pulley (703), the driven belt pulley (704), the connecting belt (705) and the arc-shaped mounting block (706) are arranged in two, the arc-shaped mounting block (706) is fixedly connected to the surface of the hollow upright column (1), the first screw (701) is rotatably connected to the lower end of the arc-shaped mounting block (706), the third servo motor (702) is arranged on the right side of the hollow upright column (1), the driving belt pulley (703) is fixedly connected to the surface of the output end of the third servo motor (702), the driven belt pulley (704) is fixedly connected to the surface of the first screw (701), and the connecting belt (705) is sleeved on the surfaces of the driving belt pulley (703) and the driven belt pulley (704), the driving pulley (703) and the driven pulley (704) are in transmission connection through a connecting belt (705), the number of the nuts (707) is four, and the four nuts (707) are respectively in threaded connection with the surfaces of the two first screws (701);
the first supporting mechanism (8) comprises a mounting sleeve (801), a supporting frame (802), a first driven gear (803), a fourth servo motor (804), a first driving gear (805), a third fixing plate (806) and a U-shaped fixing frame (807), the number of the mounting sleeve (801), the supporting frame (802), the first driven gear (803), the fourth servo motor (804), the first driving gear (805), the third fixing plate (806) and the U-shaped fixing frame (807) are two, the mounting sleeve (801) is rotatably connected between two nuts (707), the mounting sleeve (801) is sleeved on the surface of the first screw (701), the supporting frame (802) is fixedly connected to the surface of the mounting sleeve (801), the first driven gear (803) is fixedly connected to the surface of the mounting sleeve (801), and the mounting sleeve (801) is located on the lower side of the supporting frame (802), the third fixing plate (806) is fixedly connected to the surface of a nut (707), the U-shaped fixing frame (807) is fixedly connected to the lower end of the third fixing plate (806), the fourth servo motor (804) is fixedly connected to the inside of the U-shaped fixing frame (807), the output end of the fourth servo motor (804) movably penetrates through the lower end of the third fixing plate (806), the first driving gear (805) is fixedly connected to the surface of the output end of the third fixing plate (806), and the first driving gear (805) is meshed with the first driven gear (803).
2. The cantilever crane for workshop lifting according to claim 1, wherein: the angle adjusting mechanism (10) comprises a driving motor (1001), a second driving gear (1002), a second driven gear (1003) and a T-shaped cylinder (1004), the driving motor (1001) is arranged on the lower side of the hollow upright post (1), the second driving gear (1002) is fixedly connected to the surface of the output end of the driving motor (1001), the second driven gear (1003) is meshed with the second driving gear (1002), the T-shaped cylinder (1004) is arranged in the second driven gear (1003), the second driven gear (1003) is fixedly connected to the surface of the T-shaped cylinder (1004), the hollow upright post (1) and the hydraulic cylinder (2) are fixedly connected to the upper end of the T-shaped cylinder (1004), the two first screw rods (701) are rotatably connected to the upper end of the second driven gear (1003), and the bottom supporting mechanism (9) comprises a base (901), The base (901) is arranged on the lower side of the hollow upright post (1), the second mounting groove (902) is arranged in the base (901), the second mounting groove (901) is formed in the base (903), the second mounting hole (903) is formed in the second mounting groove (902), the limiting ring (904) is fixedly connected in the base (901), the limiting ring (904) is arranged on the lower side of the second mounting groove (902), the fourth fixing plate (905) is fixedly connected to the surface of the hollow upright post (1), the driving motor (1001) is fixedly connected to the upper end of the fourth fixing plate (905), the number of the third mounting holes (906) is four, the four third mounting holes (906) are all formed in the base (901), and the T-shaped cylinder (1004) is slidably connected in the second mounting groove (902), and the lower protrusion of the T-shaped cylinder (1004) is movably inserted into the limit ring (904).
3. The cantilever crane for workshop lifting according to claim 2, wherein: the second supporting mechanism (11) comprises a third rotating rod (1101), a fifth servo motor (1102), a second belt pulley (1103), a second transmission belt (1104), a third driving gear (1105), a fourth rotating rod (1106), a third driven gear (1107), a mounting plate (1108), a threaded hole (1109), a second screw (1110), a limiting block (1111), a balancing weight (1112), a third belt pulley (1113) and a third transmission belt (1114), the third rotating rod (1101) is rotatably connected between a base (901) and the second driven gear (1003), the fifth servo motor (1102) is fixedly connected to the lower end of the limiting ring (904), the second belt pulleys (1103) are arranged in two numbers, the two second belt pulleys (1103) are respectively and fixedly connected to the surface of the third rotating rod (1101) and the output end surface of the fifth servo motor (1003), and the second transmission belt (1104) is sleeved on the surfaces of the two second belt pulleys (1103), and two second pulleys (1103) are in transmission connection through a second transmission belt (1104), the third driving gear (1105) is fixedly connected to the surface of the third rotating rod (1101), the third driving gear (1105) is positioned at the lower side of the second pulley (1103), the fourth rotating rod (1106), the third driven gear (1107), the second screw (1110), the limiting block (1111), the balancing weight (1112) and the third transmission belt (1114) are all set to four, the mounting plate (1108), the threaded hole (1109) and the third pulley (1113) are all set to eight, the fourth rotating rod (1106) is rotatably connected between the base (901) and the limiting ring (904), the third driven gear (1107) is fixedly connected to the surface of the fourth rotating rod (1106), the third driving gear (1105) is engaged with the third driven gear (1107), and the mounting plate (1108) is fixedly connected to the upper and lower inner walls of the third mounting hole (906), screw hole (1109) are dug in the upper end of mounting panel (1108), second screw rod (1110) threaded connection is in screw hole (1109), stopper (1111) and balancing weight (1112) are fixed connection respectively in the upper and lower both ends of second screw rod (1110), third belt pulley (1113) is fixed connection respectively in the surface of fourth bull stick (1106) and second screw rod (1110), the surface of two third belt pulleys (1113) is located to third drive belt (1114) cover, and two third belt pulleys (1113) are connected through third drive belt (1114) transmission.
4. A method of using a cantilever crane for workshop crane, wherein the cantilever crane for workshop crane of any one of claims 1-3 is used, comprising the steps of:
s1, when the object needs to be hooked:
s11, adjusting the position of the hook: the method comprises the steps that a first servo motor (407) is started to rotate forwards, the first servo motor (407) drives a movable gear (405) to rotate forwards, a fixed rack (404) is meshed with the movable gear (405), so that the movable gear (405) moves rightwards due to the fact that the movable gear (405) rotates forwards, the movable gear (405) moves rightwards so that a T-shaped limiting rod (501) slides in a sliding hole (406), the movable gear (405) moves rightwards to drive a limiting sliding plate (408) to slide rightwards, the second fixing plate (503) moves rightwards due to the fact that the limiting sliding plate (408) moves rightwards, and the first servo motor (407) is closed when a claw moves to a proper position, so that the position of the claw is adjusted, and articles can be hooked conveniently;
s12, paying off: after the position of the hook claw is adjusted, starting a second servo motor (505) to rotate reversely, wherein the output end of the second servo motor (505) rotates reversely by the reverse rotation of the second servo motor (505), the output end of the second servo motor (505) rotates reversely simultaneously by a first rotating rod (504) and a second rotating rod (507), the steel rope (510) moves downwards by the reverse rotation of the first rotating rod (504) and the second rotating rod (507), the downward movement of the steel rope (510) moves the hook claw downwards, and the second servo motor (505) is closed when the hook claw moves downwards to an article to be hooked;
s13, taking the object: starting the air cylinder (603) to contract, enabling the movable rack (604) to move upwards by contraction of the air cylinder (603), enabling the surfaces of the two intermittent gears (605) to drive the hook claws (606) to move towards one ends close to each other due to engagement of the movable rack (604) and the two intermittent gears (605), closing the air cylinder (603) set after the two hook claws (606) hook and take articles stably, finally completing hooking of the articles, and then completing movement of the articles by reversely operating the steps;
s2, when the cantilever needs to be angularly adjusted: the driving motor (1001) is started to rotate, the rotation of the driving motor (1001) drives the second driving gear (1002) to rotate, the rotation of the second driving gear (1002) enables the second driven gear (1003) to rotate, the rotation of the second driven gear (1003) drives the hollow upright post (1) and the hydraulic cylinder (2) to rotate through the rotation of the second driven gear (1003), and then the cantilever is enabled to rotate;
s3, first support protection:
s31, height adjustment of the support frame: the third servo motor (702) is started to rotate forwards, the driving belt pulley (703) rotates forwards due to the forward rotation of the third servo motor (702), the driven belt pulley (704) is driven to rotate forwards by the forward rotation of the driving belt pulley (703) through a connecting belt (705), the first screw rod (701) rotates forwards due to the forward rotation of the driven belt pulley (704), and the nut (707) moves upwards on the surface of the first screw rod (701) due to the forward rotation of the first screw rod (701);
s32, direct angle adjustment: the fourth servo motor (804) is started to rotate reversely, the first driving gear (805) is driven to rotate reversely by the fourth servo motor (804), the first driven gear (803) rotates forwardly by the first driving gear (805), the mounting sleeve (801) moves to the opposite side by the first driven gear (803) rotating forwardly, and the fourth servo motor (804) is closed when the support frame (802) is located on the lower side of the I-shaped cross beam (401), so that the support protection of the I-shaped cross beam (401) is finally completed;
s4, second support protection: the fifth servo motor (1102) is started to rotate forwards, the second belt wheel (1103) is rotated forwards by the forward rotation of the fifth servo motor (1102), the third rotating rod (1101) is driven to rotate forwards by the forward rotation of the second belt wheel (1103) through the second transmission belt (1104), the third driving gear (1105) is driven to rotate forwards by the forward rotation of the third rotating rod (1101), the third driving gear (1105) is meshed with the third driven gear (1107), the third driven gear (1107) is driven to rotate backwards by the forward rotation of the third driving gear (1105), the fourth rotating rod (1106) is rotated backwards by the reverse rotation of the third rotating rod (1106), the third belt pulley (1113) is rotated backwards by the reverse rotation of the third belt pulley (1113), the second screw (1110) is driven to rotate backwards by the reverse rotation of the second screw (1110), and the second screw (1110) is driven to move downwards in the threaded hole (1109) by the reverse rotation of the second screw (1110), the base (901) is supported by the counterweight block (1112) through the downward movement of the second screw (1110), and the fifth servo motor (1102) is turned off when the second screw (1110) moves downward to a proper position, so that the support protection of the base (901) is finally finished.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110047859.8A CN112357784B (en) | 2021-01-14 | 2021-01-14 | Cantilever crane for workshop hoisting and use method thereof |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110047859.8A CN112357784B (en) | 2021-01-14 | 2021-01-14 | Cantilever crane for workshop hoisting and use method thereof |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN112357784A CN112357784A (en) | 2021-02-12 |
| CN112357784B true CN112357784B (en) | 2021-09-10 |
Family
ID=74534956
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202110047859.8A Active CN112357784B (en) | 2021-01-14 | 2021-01-14 | Cantilever crane for workshop hoisting and use method thereof |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN112357784B (en) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112794215A (en) * | 2021-04-08 | 2021-05-14 | 新乡纷呈机械科技有限公司 | Small portal crane for factory building and use method thereof |
| CN117886204B (en) * | 2024-03-18 | 2024-05-28 | 泰兴晨光索具有限公司 | Lifting appliance with high safety coefficient and use method |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN206172838U (en) * | 2016-11-09 | 2017-05-17 | 宁晋松宫电子材料有限公司 | Change centrifugation and retrieve jack -up suspension arm device of machine |
| CN107934798A (en) * | 2017-12-19 | 2018-04-20 | 中国电建市政建设集团有限公司 | A kind of combined material elevator |
| CN208394658U (en) * | 2018-07-03 | 2019-01-18 | 六安索伊电器制造有限公司 | A kind of foaming mould multi-angle transfer suspender |
| CN210655860U (en) * | 2019-09-17 | 2020-06-02 | 贵州升永盛工程机械有限公司 | Good building material overhead hoist of stability |
| CN110902579A (en) * | 2019-12-06 | 2020-03-24 | 湖南天泓液压机械有限公司 | Hydraulic lifting device for construction |
| CN211619813U (en) * | 2019-12-26 | 2020-10-02 | 江苏金风彩电动车辆有限公司 | Storage battery carrier with lifting mechanism |
| CN211644410U (en) * | 2020-02-10 | 2020-10-09 | 西安航空职业技术学院 | Be provided with adjustment mechanism's hoisting equipment |
| CN211688004U (en) * | 2020-02-12 | 2020-10-16 | 荣成昊工机电科技有限公司 | Slewing mechanism for tower crane |
| CN212050263U (en) * | 2020-03-14 | 2020-12-01 | 海南宏基晖建筑工程有限公司 | Rotatable hoist device for building engineering construction that facilitates use |
| CN212024557U (en) * | 2020-04-30 | 2020-11-27 | 中建七局安装工程有限公司 | Adjustable special lifting appliance with column top cover plate column body |
-
2021
- 2021-01-14 CN CN202110047859.8A patent/CN112357784B/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN112357784A (en) | 2021-02-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN112357784B (en) | Cantilever crane for workshop hoisting and use method thereof | |
| CN110409844A (en) | Cement partition wall panel mounting | |
| CN210598069U (en) | Scaffold with material lifting device | |
| CN117208754B (en) | Lifting device for special-shaped building structure | |
| CN112794215A (en) | Small portal crane for factory building and use method thereof | |
| CN106429904A (en) | Autobalance crane | |
| CN116022098A (en) | Front-mounted power exchange equipment and power exchange station | |
| CN116873742B (en) | Hoisting device for metal casting | |
| CN220334589U (en) | Crane sling | |
| CN111824972B (en) | Crane with a movable crane | |
| CN211945916U (en) | Lifting appliance with adjustable hook distance | |
| CN117303197A (en) | Movable hanging bracket | |
| CN112850522B (en) | Crane with good stability and working method thereof | |
| CN113493161B (en) | Method for hoisting container | |
| CN215439559U (en) | Lifting device for electric power overhaul | |
| CN112408285B (en) | Welding system suitable for high-altitude operation | |
| CN110255394B (en) | Bridge pier crane for construction of cross-sea bridge | |
| CN211393479U (en) | Building construction lift stops layer platform | |
| CN210029743U (en) | Lifting appliance for high-rise prefabricated composite slab construction | |
| CN218174453U (en) | Double-main-beam hook bridge crane | |
| CN215798117U (en) | Portable crane that stability is high | |
| CN213923813U (en) | Clamping tool and clamping equipment | |
| CN219732691U (en) | Scaffold capable of being lifted quickly | |
| CN221836581U (en) | Maintenance device for refrigerating fan | |
| CN215798067U (en) | Small crane convenient to load |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| TA01 | Transfer of patent application right |
Effective date of registration: 20210820 Address after: No. 28, Jianghai Road, Qidong Binhai Industrial Park, Nantong City, Jiangsu Province, 226000 Applicant after: NANTONG LIFUTONG LIFTING MACHINERY Co.,Ltd. Address before: F III (201-202) - 102, torch Park, high tech Zone, 1789 Xinfei Avenue, high tech Zone, Xinxiang City, Henan Province, 453600 Applicant before: Xinxiang Fancheng Machinery Technology Co.,Ltd. |
|
| TA01 | Transfer of patent application right | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |