CN112074752A - 具有用于对象的多维度定位的多个天线的传感器 - Google Patents
具有用于对象的多维度定位的多个天线的传感器 Download PDFInfo
- Publication number
- CN112074752A CN112074752A CN201980023190.XA CN201980023190A CN112074752A CN 112074752 A CN112074752 A CN 112074752A CN 201980023190 A CN201980023190 A CN 201980023190A CN 112074752 A CN112074752 A CN 112074752A
- Authority
- CN
- China
- Prior art keywords
- antenna
- antennas
- angle
- controller
- sensor device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 238000000034 method Methods 0.000 claims description 17
- 238000004891 communication Methods 0.000 description 79
- 238000004422 calculation algorithm Methods 0.000 description 15
- 238000005516 engineering process Methods 0.000 description 7
- 230000006870 function Effects 0.000 description 5
- 238000012545 processing Methods 0.000 description 5
- 231100001261 hazardous Toxicity 0.000 description 4
- 239000000463 material Substances 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 3
- 239000004020 conductor Substances 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 230000001413 cellular effect Effects 0.000 description 2
- 239000000919 ceramic Substances 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000004880 explosion Methods 0.000 description 2
- 230000003993 interaction Effects 0.000 description 2
- 230000033001 locomotion Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- UGFAIRIUMAVXCW-UHFFFAOYSA-N Carbon monoxide Chemical compound [O+]#[C-] UGFAIRIUMAVXCW-UHFFFAOYSA-N 0.000 description 1
- CYTYCFOTNPOANT-UHFFFAOYSA-N Perchloroethylene Chemical compound ClC(Cl)=C(Cl)Cl CYTYCFOTNPOANT-UHFFFAOYSA-N 0.000 description 1
- 230000003321 amplification Effects 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 229910002091 carbon monoxide Inorganic materials 0.000 description 1
- 238000013500 data storage Methods 0.000 description 1
- 230000005684 electric field Effects 0.000 description 1
- 230000005672 electromagnetic field Effects 0.000 description 1
- 238000004146 energy storage Methods 0.000 description 1
- 239000002360 explosive Substances 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- 230000004807 localization Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000013178 mathematical model Methods 0.000 description 1
- 230000006855 networking Effects 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 238000005192 partition Methods 0.000 description 1
- 230000002085 persistent effect Effects 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 239000000779 smoke Substances 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 230000036962 time dependent Effects 0.000 description 1
Images







Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B17/00—Monitoring; Testing
- H04B17/20—Monitoring; Testing of receivers
- H04B17/27—Monitoring; Testing of receivers for locating or positioning the transmitter
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/04—Position of source determined by a plurality of spaced direction-finders
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Electromagnetism (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Arrangements For Transmission Of Measured Signals (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
- Selective Calling Equipment (AREA)
- Radar Systems Or Details Thereof (AREA)
Abstract
用于定位空间体积中的对象的系统可包括:具有多个天线的传感器设备以及耦合到所述天线的开关。该系统还可包括可通信地耦合到所述开关的控制器,其中所述控制器测量在第一天线处接收的信号的第一角度,其中所述信号的所述第一角度与所述对象的位置相关联。所述控制器还将所述开关从第一位置操作至第二位置,其中所述第一位置启用所述第一天线,并且其中所述第二位置启用第二天线。所述控制器进一步测量在所述第二天线处接收的所述信号的第二角度,其中所述信号的所述第二角度与所述对象的所述位置相关联。所述控制器还使用所述第一角度和所述第二角度确定所述对象的多维度位置。
Description
技术领域
本文所描述的实施例一般性地涉及在空间中定位对象,并且特别地涉及牵涉到传感器的系统、方法和设备,所述传感器具有用于定位对象的多个天线。
背景技术
不同的方法被用来定位空间体积内的对象。例如,当牵涉到信号时,可以测量每个信号的接收信号强度指示(RSSI)来帮助确定空间体积内的对象的位置。在这种情况中,仅仅使用了单个天线。另外,本领域中当前使用的方法多半依赖信号的强度。结果,当前使用本领域中的信号的实施例仅仅在单个维度中定位对象,并且因此不是非常精确。
发明内容
一般而言,在一个方面,本公开涉及用于定位空间体积中的对象的系统。该系统可包括具有多个天线的传感器设备,以及耦合到所述多个天线的开关。该系统还可包括可通信地耦合到开关的控制器。该控制器在第一时间处测量在所述多个天线中的第一天线处接收的信号的第一角度,其中,信号的第一角度与对象的位置相关联。所述控制器还将所述开关从从第一位置操作至第二位置,其中第一位置启用第一天线,并且其中第二位置启用所述多个天线中的第二天线。该系统进一步在第二时间处测量在所述多个天线中的第二天线处接收的信号的第二角度,其中信号的第二角度与对象的位置相关联。所述控制器还使用第一角度和第二角度确定空间体积中的对象的多维度位置。
在另一个方面,本公开可一般地涉及传感器设备,该传感器设备包括外壳和被布置在外壳的外表面上的多个天线。该传感器设备还可包括耦合到所述多个天线的开关,以及可通信地耦合到开关的控制器。该控制器可被配置成在第一时间处测量在所述多个天线中的第一天线处接收的信号的第一角度,其中,信号的第一角度与对象的位置相关联。该控制器也可被配置成将开关从从第一位置操作至第二位置,其中第一位置启用第一天线,并且其中第二位置启用所述多个天线中的第二天线。该控制器还可进一步被配置成在第二时间处测量在所述多个天线中的第二天线处接收的信号的第二角度,其中,信号的第二角度与对象的位置相关联。该控制器还可被配置成使用第一角度和第二角度来确定空间体积中的对象的多维度位置。
依据下文的描述和所附的权利要求,这些和其他方面、目的、特征以及实施例将是显然的。
附图说明
附图仅仅图示了具有用于对象的多维度定位的多个天线的传感器(在本文中也被称作传感器设备)的示例实施例,并且因此不被认为是对其范围的限制,因为具有用于对象的多维度定位的多个天线的传感器可以准许其他同样有效的实施例。在附图中示出的组件和特征不一定是按比例的,而是将重点放在清楚地说明示例实施例的原理上。另外,一些维度或位置可被放大,以帮助在视觉上传达这样的原理。在附图中,附图标记指代类似的或对应的但不一定相同的组件。
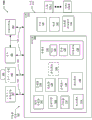
图1示出了根据某些示例实施例的包括传感器设备的系统的图。
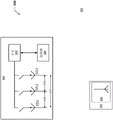
图2示出了根据某些示例实施例的计算设备。
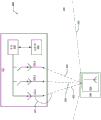
图3示出了根据某些示例实施例的其中对象位于空间体积中的系统。
图4-6示出了根据某些示例实施例的使用到达角(AoA)方法的图3的系统,其中对象位于空间体积中。
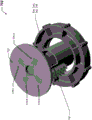
图7A-7D示出了根据某些示例实施例的传感器设备的各种视图。
图8示出了其中可以使用图7A-7D中的示例传感器设备的系统。
具体实施方式
在本文中所讨论的示例实施例是针对具有用于对象的多维度定位的多个天线的系统、方法和传感器设备。尽管在本文中示例实施例被描述成使用被布置在传感器设备上的多个天线来定位空间体积中的对象,但是,除了传感器设备之外或者作为对传感器设备的替代,示例实施例还可以使用许多其他的电气设备中的一个或多个。这种其他的电气设备可包括但不限于光开关、控制板、壁式插座和照相机。
示例实施例可用于具有任意尺寸和/或处于任何环境(例如,室内的,室外的,危险的,无危险的,高湿度,低温,腐蚀性的,无菌的,高振动)的空间体积。另外,尽管在本文中所描述的信号是射频(RF)信号,但是示例实施例可以与许多其他类型的信号中的任何信号一起使用,包括但不限于WiFi、蓝牙、低能耗蓝牙(BLE)、RFID、紫外波、微波和红外信号。示例实施例可被用来在多个维度中实时地定位空间体积中的对象(也被称作实时定位服务或RTLS)。
在本文中所描述的传感器设备的示例实施例可被用来测量许多不同参数中的一个或多个,包括但不限于占位、运动、噪声、环境光、一氧化碳、烟雾和温度。因此,即使在危险的位置,在本文中所描述的传感器设备也不应被认为限于特定类型的传感器设备和/用于特定的目的。
示例实施例提供了空间体积中的对象的高精度的二维或三维定位。另外,示例实施例可提供高定位准确率(例如,与使用RSSI相比)。此外,示例实施例提供高水平的数据安全性,如果用户期望这种安全性的话。示例实施例也是更加可靠的,因为其按需使用少量的电力。
在某些示例实施例中,具有用于对象的多维度定位的多个天线的传感器服从于满足某些标准和/或要求。例如,美国国家电气规范(NEC),美国电气制造商协会(NEMA),国际电工委员会(IEC),美国联邦通信委员会(FCC),以及电气和电子工程师协会(IEEE)设立的关于电气外壳(例如,灯具)、布线和电气连接的标准。需要的时候,在本文中所描述的示例实施例的使用满足(和/或允许对应的设备满足)这样的标准。在一些(例如,光伏太阳能)应用中,在本文中所描述的电气外壳可满足特定于这类应用的附加标准。
如果附图的组件被描述但没有在该附图中被明确地示出或标记,可以由另一附图中用于对应组件的标记推断出该组件。相反地,如果附图中的组件被标记但未被描述,针对这种组件的描述可与另一附图中针对对应组件的描述基本相同。在本文中,针对附图中不同组件的编号方案是这样的:每个组件为三位数或四位数,并且其他附图中的对应组件具有相同的后两位数。对在本文中所示出和描述的任何附图来说,这些组件中的一个或多个组件可被省略、添加、重复和/或替换。相应地,在特定的附图中所示出的实施例不应被认为是限于在这种附图中所示出的组件的特定布置。
另外,除非经明确表述,特定实施例(例如,如在本文中的附图中所示出的)不具有特定特征或组件这一表述并不意味着这样的实施例不能够具有这种特征或组件。例如,出于本文中的当前或未来的权利要求的目的,被描述成未包含在一个或多个特定附图中所示出的示例实施例中的特征或组件能够被包含在对应于本文中这样的一个或多个特定附图的一个或多个权利要求中。
参照附图,在下文中将更详细地描述具有用于对象的多维度定位的多个天线的传感器的示例实施例,在附图中示出了具有用于对象的多维度定位的多个天线的传感器的示例实施例。然而,具有用于对象的多维度定位的多个天线的传感器可以以许多不同的形式实施并且不应被解读为限于在本文中所阐述的示例实施例。相反,这些实施例被提供使得本公开对本领域的普通技术人员而言将是充分且完整的,并且将向本领域的普通技术人员全面地传达具有用于对象的多维度定位的多个天线的传感器的范围。为了一致性,各附图中的类似的但不必相同的元件(有时也被称作组件)通过类似的参考编号来标记。
诸如“第一”,“第二”和“在内(within)”之类的术语仅仅被用来区分一个组件(或组件的部件,或组件的状态)与另一个组件。这样的术语不意味着表示偏好或特定方向,并且不意味着限制具有用于对象的多维度定位的多个天线的传感器的实施例。在下面的示例实施例的详细描述中,阐述了众多具体的细节,以便提供对本发明更加充分的理解。然而,对本领域的普通技术人员将显而易见的是,本发明可在没有这些具体细节的情况下被实践。在其他情况下,众所周知的特征没有被详细地描述,以避免不必要地复杂化本说明书。
图1示出了根据某些示例实施例的包括传感器设备102的系统100的图。系统100可包括一个或多个对象160、用户150、网络管理器180以及一个或多个其他设备187,它们中的一些或全部可位于空间体积199中。传感器设备102可包括控制器104、多个天线175、开关145、电源140以及大量传感器设备组件142。控制器104可包括大量组件中的一个或多个。这样的组件可包括但不限于控制引擎106、通信模块108、计时器110、电力模块112、存储库130、硬件处理器120、存储器122、收发器124、应用接口126以及可选的安全模块128。
在图1中示出的组件不是穷举的,并且在一些实施例中,图1中所示出的组件中的一个或多个可不被包括在示例系统100中。另外,在图1中所示出的系统100及其各种组件的特定配置不被认为是限制性的。例如,示例传感器设备102的任何组件可以与传感器设备102的一个或多个其他组件分立或组合。例如,可以存在多个开关145而不是一个开关145。作为另一个示例,代替于具有多个天线175 的单个传感器设备102,系统100可以具有多个彼此可通信地耦合的传感器设备102,每个传感器设备102具有一个天线175。作为又一个示例,开关145可以是控制器104的部件。作为又一个示例,控制器104可以是与传感器设备102的其余部件物理上分离、但可通信地耦合的独立组件(或诸如网络管理器180之类的另一组件的部件)。
用户150可以是与空间体积199中的传感器设备102和/或对象160交互的任何人。具体而言,使用示例实施例,用户150可以对与系统100相关联的一个或多个组件(例如,控制器104,网络管理器180)进行编程、操作和/或与上述组件交互。用户150的示例可包括但不限于工程师、电工、仪表和控制技术员、机械师、操作员、顾问、承包人、资产、网络管理员以及制造商代表。
用户150可以使用用户系统(未示出),该用户系统可包括显示器(例如,GUI)。用户150经由应用接口126(在下文中描述)与传感器设备102的控制器104交互(例如,向其发送数据,从其接收数据)。用户150也可与网络管理器180和/或多个对象160中的一个或多个对象交互。使用通信链路105来执行用户150、传感器设备102和网络管理器180之间的交互。
每个通信链路105可包括有线的(例如,1类电缆,2类电缆,电气连接器)和/或无线(例如,WiFi,可见光通信,蜂窝网络,蓝牙,WirelessHART,ISA100,电力线载波,RS485,DALI)技术。例如,通信链路105可以是(或包括)耦合到传感器设备102的外壳103和网络管理器180的一个或多个电导体。通信链路105可以在传感器设备102、用户150和网络管理器180之间传输信号(例如,电力信号,通信信号,控制信号,数据)。作为对比,如下文中所讨论的,系统100的传感器设备102可使用定位信号195与一个或多个对象160交互。所述一个或多个对象160可以使用通信链路105与用户150和/或网络管理器180通信。
网络管理器180是控制包括传感器设备102的控制器104的系统100的全部或部分的设备或组件。网络管理器180可基本上类似于控制器104。替代地,除了在下文描述的控制器104的特征,网络管理器180还可包括许多特征中的一个或多个,或者上述许多特征改自于下文中所述的控制器104的特征。
另一设备187可以是与传感器设备102通信的众多设备和/或系统中的一个或多个。这样的另一设备187的示例可包括但不限于灯具、照明系统、恒温器、另一传感器设备、安全系统、消防系统、HVAC系统以及无线路由器。
如在本文中所定义的,对象160可以是任何单元或单元组。对象160可以自行移动、能够被移动或者是静态的。对象160的示例可包括但不限于人(例如,用户150、访客、雇员)、部件(例如,电机定子、罩)、一件设备(例如,风扇、容器、桌子、椅子)或设备部件的群组(例如,堆积有存货的托盘)。每个对象160位于空间体积199中。
每个对象160可包括通信设备190,其可以发送RF信号195到传感器设备102。通信设备190可包括传感器设备102的一个或多个组件(例如,开关、天线、收发器)和/或在下文中所描述的与传感器设备102的控制器104相关的功能。例如,传感器设备102的天线175中的一个或多个既可用于定位对象160,又可用于与用户150和网络管理器180通信。
利用示例实施例,对象160的通信设备190(有时也被称作信标190)可处于睡眠模式,直到通信设备190被某些事件或时间的推移所唤醒。当这发生时,通信设备190可打开足够长的时间来解析由传感器设备102的一个或多个天线175广播的初始RF信号195,并且然后响应于初始RF信号195而生成并发送它自己的RF信号195到传感器设备102。
替代地,对象160的通信设备190可处于睡眠模式,直到独立于传感器设备102的天线175的一些预先确定的时间点(例如,每小时,每二十四小时)。当这发生时,通信设备190可打开足够长的时间来发送RF信号195到传感器设备102,使得传感器设备102的所有天线175接收到RF信号195。该后一实施例可与定位对象160的AoA方法一同使用。在任何情况中,RF信号195可包括与对象160相关联的UUID(或一些其他形式的识别)。一旦RF信号195被通信设备190发送,通信设备190可返回进入睡眠模式,从而节省大量的电力。
在借助传感器设备102的天线175发送RF信号195时,通信设备190可使用众多通信协议中的一种或多种。在某些示例实施例中,对象160可包括电池(电源或电力模块的一种形式),该电池被用来至少部分地向包括通信设备190的对象160的其余部件中的一些或全部提供电力。
根据一个或多个示例实施例,用户150、网络管理器180和/或任何其他设备187可使用应用接口126与传感器设备102的控制器104交互。具体而言,控制器104的应用接口126从用户150和网络管理器180接收数据(例如,信息,通信,指示),并且发送数据(例如,信息,通信,指示)到用户150和网络管理器180。在某些示例实施例中,用户150和网络管理器180可包括从控制器104接收数据并且向控制器104发送数据的接口。这种接口的示例可包括但不限于图形用户接口、触摸屏、应用程序编程接口、键盘、监视器、鼠标、Web服务器(webservice)、数据协议适配器、一些其他的硬件和/或软件,或者它们的任何适当的组合。
在某些示例实施例中,控制器104、用户150和网络管理器180可使用它们自己的系统或共享系统。这样的系统可以是基于因特网(Internet-based)或基于内联网(intranet-based)的、能够与各种软件通信的计算机系统的形式,或者包含这种计算机系统的形式。计算机系统包括任何类型的计算设备和/或通信设备,包括但不限于控制器104。这种系统的示例可包括但不限于具有局域网(LAN)、广域网(WAN)、因特网或内联网入口的台式计算机,具有LAN、WAN、因特网或内联网入口的笔记本电脑,智能电话,服务器,服务器场,安卓设备(或等同物),平板电脑,智能手机以及个人数字助理(PDA)。这种系统可对应于如下文中关于图2所描述的计算机系统。
此外,如上文所讨论的,这种系统可含有对应的软件(例如,用户软件,控制器软件,网络管理器软件)。根据一些示例实施例,该软件可在相同的或分离的设备(例如,服务器,主机,台式个人电脑(PC),笔记本电脑,PDA,电视机,有线盒(cable box),卫星盒(satellite box),信息亭(kiosk),电话,移动手机或其他计算设备) 上执行,并且可通过通信网络(例如,因特网,内联网,以太网,LAN或其他的网络通信方法)和/或通信信道而与有线和/或无线器件(segment)耦合。一个系统的软件可以是系统100内的另一个系统的软件的一部分、或者与其分离但又协同地运行。
传感器设备102可以是独立式设备,其不是一个更大的系统的部分。替代地,传感器设备102可以与系统集成。这种系统的示例可包括但不限于照明系统、安全系统、消防系统、HVAC系统以及紧急出口系统。如上文所讨论的,传感器设备102可测量一个或多个参数,该参数可在一个或多个这种系统的操作中使用。
传感器设备102可包括外壳103。外壳103可包括形成空腔101的至少一个壁。在一些情况中,外壳103可被设计成符合任何适用的标准,使得传感器设备102可位于特定环境中(例如,危险的环境)。例如,如果传感器设备102位于易爆性环境中,外壳103可以是防爆的。根据适用的工业标准,防爆外壳是被配置成遏制源自内部的或可通过外壳传播的爆炸的外壳。在某些示例实施例中,在任何情况下,天线175中的一个或多个可被布置在外壳103的外表面上。
传感器设备102的外壳103可被用来容纳传感器设备102的一个或多个组件,包括控制器104的一个或多个组件。例如,如在图1中所示出的,控制器104(在这种情况下,其包括控制引擎106、通信模块108、计时器110、电力模块112、存储库130、硬件处理器120、存储器122、收发器124、应用接口126以及可选的安全模块128)、电源140、天线175、开关145以及传感器设备组件142被布置在由外壳103形成的空腔101中。在可替代的实施例中,传感器设备102的这些或其他组件中的任一个或多个可被布置在外壳103上和/或远离外壳103。
存储库130可以是存储软件和数据的持久性存储设备(或设备的集合),该软件和数据被用来协助控制器104与用户150、网络管理器180和多个对象160中的一个或多个对象、以及系统100内的任何其他适用的传感器设备102的通信。在一个或多个示例实施例中,存储库130存储一个或多个协议132、一个或多个算法133以及对象数据134。协议132可以是控制器104的控制引擎106在某个时间点处基于某些条件而遵循的任何例程(例如,一系列方法步骤)和/或其他类似的可操作例程某些。
协议132也可包括被用来在控制器104与用户150、网络管理器180、任何其他适用的设备187以及多个对象160中的一个或多个对象之间发送/接收的数据的众多通信协议中的任何协议。通信协议132中的一个或多个可以是时间同步协议。这种时间同步协议的示例可包括但不限于高速通道可寻址远程换能器(HART)协议、无线HART协议以及国际自动化学会(ISA)100协议。通过这种方式,通信协议132中的一个或多个可针对在系统100内传递的数据提供安全层。
算法133可以是任何公式、数学模型、预测(forecast)、仿真和/或其他类似的可操作例程,控制器104的控制引擎106使用它们来执行某些计算、预测、趋势分析、估计以及任何其他有用的数据类型,从而定位对象160。算法133的一个示例是计算角度的公式或模型,在该角度处,天线175接收到信号。算法133的另一示例是使用由多个天线175接收的信号的角度来确定对象160在空间体积199中的位置的公式或模型。一个或多个算法133的另一个示例是可基于由天线175在一段时间内接收的信号来跟踪对象160在空间体积199中的移动的公式或模型。
对象数据134可以是与可通信地耦合到控制器104的每个对象160相关联的任何数据。这种数据可包括但不限于对象160的制造商、对象160的型号、对象160的通信容量、对象160的最后的已知位置以及对象160的年龄。存储库130的示例可包括但不限于数据库(或许多数据库)、文件系统、硬盘驱动器、闪存、一些其他形式的固态数据存储或者它们的任何适当的组合。
存储库130也可包括任何其他类型的数据,包括但不限于用户偏好、阈值、默认值、历史数据、现行数据以及预测。根据一些示例实施例,存储库130可位于多个物理机上,每个物理机存储协议132、算法133和/或对象数据134的全部或部分。每个存储单元或设备在物理上可位于相同或不同的地理位置。
存储库130可以操作性地连接到控制引擎106。在一个或多个示例实施例中,控制引擎106包括与系统100中的用户150、网络管理器180、任何其他设备187以及对象160通信的功能。更具体地说,控制引擎106发送信息到存储库130和/或从存储库130接收信息,以便与用户150、网络管理器180、任何其他设备187以及对象160通信。如下文中所讨论的,在某些示例实施例中,存储库130也可被操作性地连接到通信模块108。
在某些示例实施例中,控制器104的控制引擎106控制该控制器104的一个或多个其他组件(例如,通信模块108、计时器110、收发器124)的操作。例如,当控制器104和系统100中的另一个组件(例如,对象160、用户150)之间没有通信时,或者当控制器104和系统100中的另一个组件之间的通信遵循常规模式时,控制引擎106可以使通信模块108处于“睡眠”模式。在这种情况中,通过仅仅在需要通信模块108时才启用通信模块108,控制器104所消耗的电力得到节省。
作为另一个示例,控制引擎106可以指引计时器110何时来提供当前时间、开始跟踪时间段和/或执行计时器110能力范围内的另一功能。作为又一个示例,控制引擎106可以指引收发器124来通过开关145和天线175中的一个或多个天线接收来自系统100中的一个或多个对象160的RF信号195。该示例提供了另一个情况,其中控制引擎106可以节省由控制器104和系统100的其他组件(例如,对象160)消耗的电力。
在定位空间体积199中的对象160的尝试中,控制引擎106可确定何时接收一个或多个RF信号195。为了节省能量,控制引擎106并不是持续地接收RF信号195,而是仅在离散的时间处这样做。基于众多因素中的一个或多个,控制引擎106可主动接收RF信号195,所述因素包括但不限于时间的流逝、事件的发生、来自用户150的指示以及接收自网络管理器180的命令。
在一些情况下,当系统100包括多个传感器设备(其他设备187的部件)时,每个传感器设备可具有某种形式的控制器104。一个控制器104的控制引擎106可与其他传感器设备的控制器104配合和/或直接控制其他传感器设备中的一个或多个传感器设备,以广播多个RF信号195和/或接收多个RF信号195。在这个示例中,控制引擎106可操作一个或多个开关145来完成其功能。
在一些情况下,响应于由传感器设备102所广播的多个RF信号195,传感器设备102的控制引擎106可基于由对象160发送的(例如,由其所产生的、从其所反射的)多个RF信号195而定位空间体积中的对象160。为了实现这一点,控制引擎106获取由对象160广播和/或自对象160反射的多个RF信号195(通过开关145直接来自于天线175和/或来自于多个其他设备187中的一个或多个其他设备的另一控制引擎106)。控制引擎106也可基于RF信号195而使用一种或多种协议132和/或算法133来确定对象160的多维度位置。
例如,由控制引擎106使用的协议132和/或算法133可要求控制引擎106确定接收自对象160的每个RF信号195的AoA和/或出发角(AoD)。控制引擎106使用协议132和/或算法133来指示控制引擎106何时以及如何操作开关145。结果,由控制引擎106使用的协议132和/或算法133也可协助控制引擎106来确定一个或多个对象160的多维度位置。如果使用两个天线175,那么可由控制引擎106获取对象160的二维位置。如何使用AoA在空间体积199中定位对象160的示例在下文中关于图3-6来提供。由控制引擎106使用的算法133的示例可包括但不限于:角度=波长×天线之间在空间中的距离差 ÷2 ÷π ÷天线之间的距离。
控制引擎106可对用户150、网络管理器180和多个对象160中的一个或多个对象提供控制、通信、RF信号195和/或其他信号。类似地,控制引擎106可接收来自用户150、网络管理器180、多个其他设备187中的一个或多个其他设备以及对象160中的一个或多个对象的控制、通信、RF信号195和/或其他信号。使用RF信号195,控制引擎106可自动地(例如,基于存储在存储库130中的一个或多个算法133)和/或基于接收自另一个设备(例如,网络管理器180)的控制、通信和/或其他类似的信号与每个对象160通信。控制引擎106可包括印制电路板,硬件处理器120和/或控制器104的一个或多个分立组件被安置在该印制电路板上。
在某些示例实施例中,控制引擎106可包括接口,该接口使得控制引擎106能够与传感器设备102的一个或多个组件(例如,电源140)通信。例如,如果传感器设备102的电源140在IEC 62386标准下工作,那么电源140可包括数字可寻址照明接口(DALI)。在这种情况中,控制引擎106也可包括DALI,以使得能够与传感器设备102的电源140通信。这种接口可与通信协议132共同地或独立地工作,该通信协议132被用来在控制器104与用户150、网络管理器180、任何其他设备187以及对象160之间通信。
控制引擎106(或控制器104的其他组件)也可包括一个或多个硬件架构和/或软件架构组件以执行其功能。这种组件可包括但不限于通用异步接收器/传输器(UART)、串行外设接口(SPI)、直连容量(DAC)存储设备、模数转换器、内部集成电路总线(I2C)以及脉宽调制器(PWM)。
使用示例实施例时,尽管控制器104的至少一部分(例如,控制引擎106、计时器110)一直是开通的,但是当控制器104的其余部件和对象160没有被使用时,它们可处于睡眠模式。另外,控制器104可控制系统100中的一个或多个其他设备187的某些方面(例如,发送RF信号195到对象160以及接收来自对象160的RF信号195、操作开关145)。
系统100的通信网络(使用通信链路105)可具有任何类型的网络架构。例如,系统100的通信网络可以是网状网络。作为另一个示例,系统100的通信网络可以是星型网络。当控制器104包含能量存储设备(例如,作为电力模块112的部件的电池)时,可以在系统100的运行中节省甚至更多的电力。另外,使用时间同步通信协议132,在控制器104和用户150、网络管理器180以及任何其他设备187之间传输的数据可以是安全的。
控制器104的通信模块108确定和实施通信协议(例如,来自于存储库130的协议132),当控制引擎106与用户150、网络管理器180、任何其他设备187和/或所述多个对象160中的一个或多个对象通信(例如,向其发送信号或从其接收信号)时使用该通信协议。在一些情况中,通信模块108访问对象数据134,以确定对于由控制引擎106发送的RF信号195而言,哪种通信协议在对象160的能力范围内。另外,通信模块108可解析由控制器104接收的通信(例如,RF信号195)的通信协议,使得控制引擎106可解析该通信。
通信模块108可直接发送数据(例如,协议132、对象数据134)到存储库130和/或直接从存储库130检索数据。可替代地,控制引擎106可促进通信模块108和存储库130之间的数据传输。通信模块108也可对由控制器104发送的数据提供加密,并且对由控制器104接收的数据提供解密。通信模块108也可提供关于由控制器104发送和接收的数据的众多其他服务中的一个或多个服务。这样的服务可包括但不限于数据包路由信息和在数据中断的事件中要遵循的例程。
控制器104的计时器110可跟踪时钟时间、时间间隔、时间量和/或任何其他的时间度量。计时器110也可对事件发生的次数进行计数,无论是否与时间有关。可替代地,控制引擎106可执行该计数功能。计时器110能够并发地跟踪多个时间度量。计时器110可同时测量多次。计时器110可基于接收自控制引擎106的指示、基于接收自用户150的指示、基于在用于控制器104的软件中编程的指示、基于一些其他的条件或依据某些其他的组件,或者依据它们中的任何组合来跟踪时间周期。
控制器104的电力模块112为控制器104的一个或多个其他组件(例如,计时器110、控制引擎106)提供电力。另外,在某些示例实施例中,电力模块112可为传感器设备102的电源140提供电力。电力模块112可包括众多的单一或多种分立元件(例如,晶体管,二极管,电阻器)中的一个或多个,和/或微处理器。电力模块112可包括印制电路板,所述微处理器和/或一个或多个分立元件被安置在该印制电路板上。
电力模块112可包括一个或多个组件(例如,变压器、二极管桥、逆变器、转换器),所述一个或多个组件从传感器设备102外部的源接收电力(例如,通过电缆)并且生成一类型(例如,交流、直流)与水平(例如,12V,14V,120V)的电力,该电力可由控制器104的其他组件和/或由电源140使用。另外,或作为替代,电力模块112可以是自身为向控制器104的其他组件和/或电源140提供信号的电源。例如,电力模块112可以是电池。作为另一个示例,电力模块112可以是本地化的光伏电力系统。
根据一个或多个示例实施例,控制器104的硬件处理器120执行软件。具体而言,硬件处理器120可执行控制引擎106或控制器104的任何其他部件上的软件,以及由用户150与网络管理器180和/或任何其他设备187使用的软件。在一个或多个示例实施例中,硬件处理器120可以是集成电路、中央处理单元、多核处理芯片、包含多个多核处理芯片的多芯片模块或其他的硬件处理器。硬件处理器120还因其它名字而已知,包括但不限于计算机处理器、微处理器以及多核处理器。
在一个或多个示例实施例中,硬件处理器120执行存储在存储器122中的软件指令。存储器122包括一个或多个高速缓冲存储器、主存储器和/或任何其他适当类型的存储器。根据一些示例实施例,存储器122相对于硬件处理器120被分立地放置在控制器104内。在某些配置中,存储器122可以与硬件处理器120集成。
在某些示例实施例中,控制器104不包括硬件处理器120。在这样的情况中,作为示例,控制器104可包括一个或多个现场可编程门阵列(FPGA)、一个或多个绝缘栅双极型晶体管(IGBT)和/或一个或多个集成电路(IC)。使用FPGA、IGBT、IC和/或现有技术中已知的其他类似设备允许控制器104(或其部件)是可编程的、以及在不使用硬件处理器的情况下根据某些逻辑规则和阈值运行。可替代地,FPGA、IGBT、IC和/或类似的设备可与一个或多个硬件处理器120一起使用。
控制器104的收发器124可发送和/或接收控制和/或通信信号,包括RF信号195。具体而言,收发器124可被用来在控制器104与用户150、网络管理器180、任何其他设备187和/或对象160之间传输数据。收发器124可使用有线和/或无线技术。收发器124可以以这样的方式配置:使得由收发器124发送和/或接收的控制和/或通信信号可被另一个收发器接收和/或发送,所述另一个收发器是用户150、网络管理器180、任何其他设备187和/或对象160的部件。
当收发器124使用无线技术时,任何类型的无线技术可被收发器124在发送和接收信号中使用。这样的无线技术可包括但不限于WiFi,可见光通信,蜂窝联网,低能耗蓝牙(BLE)以及蓝牙。当发送和/或接收包括RF信号195的信号时,收发器124可使用任何数量的适当通信协议(例如,ISA100、HART)中的一个或多个。这样的通信协议可被存储在存储库130中的协议132中。此外,用于用户150、网络管理器180、任何其他设备187和/或对象160的任何收发器信息可以是存储库130的对象数据134(或类似区域)的部分。
可选地,在一个或多个示例实施例中,安全模块128保障控制器104、用户150、网络管理器180、任何其他设备187和/或对象160之间的交互。更具体地说,安全模块128基于认证通信源身份的安全秘钥来验证来自软件的通信。例如,用户软件可以与安全秘钥相关联,该安全秘钥使用户150的软件能够与传感器设备102的控制器104交互。此外,在一些示例实施例中,安全模块128可限制信息的接收、针对信息的请求和/或对信息的访问。
如上文所提到的,除了控制器104及其组件之外,传感器设备102还可包括电源140、多个天线175、至少一个开关145和一个或多个传感器设备组件142。传感器设备102的传感器设备组件142是通常见于传感器设备中以允许传感器设备102操作的设备和/或组件。传感器设备组件142可以是电气的、电子的、机械的或它们的任何组合。传感器设备102可具有任何数量和/或类型的传感器设备组件142中的一个或多个传感器设备组件。这样的传感器设备组件142的示例可包括但不限于光源、传感器、散热器、电导体或电缆、接线板、透镜、漫射镜(diffuser)、反射镜(reflector)、通风设备、挡板(baffle)、调光器以及电路板。
传感器设备102的电源140为多个传感器设备组件142中的一个或多个传感器设备组件提供电力。电源140可与控制器104的电力模块112基本相同或与之不同。电源140可包括众多单一或多种分立组件(例如,晶体管,二极管,电阻器)中的一个或多个,和/或微处理器。电源140可包括印制电路板,微处理器和/或一个或多个分立组件被安置在该印制电路板上。
电源140可包括一个或多个组件(例如,变压器、二极管桥、逆变器、换流器),该一个或多个组件从控制器104的电力模块112接收电力(例如,通过电缆)或发送电力到控制器104的电力模块112。该电源可以生成一类型(例如,交流、直流)与水平(例如,12V,24V,120V)的、可被这种电力的接收者(例如,传感器设备组件142、控制器106)使用的电力。另外,或作为替代,电源140可从传感器设备102外部的源接收电力。另外,或作为替代,电源140自身可以是电力的源。例如,电源140可以是电池、本地化的光伏电力系统或某些其他独立的电力的源。
如上文所讨论的,传感器设备102包括多个(例如,两个、三个、五个、九个、二十个)天线175。天线175是将电功率转换为RF信号195(用于传输)并将RF信号195转换为电功率(用于接收)的电气设备。在传输中,通过开关145,无线电发射器(例如,收发器124)将在射频处振荡的电流(即高频率的交流电(AC))提供给天线175的端子,并且该天线将来自该电流的能量辐射为RF信号195。在接收时,天线175截取RF信号195的一些功率以便在其端子处产生微小的电压,该微小的电压通过开关145施加到接收器(例如,收发器124)进行放大。
天线175典型地可由电导体的布排列组成,所述电导体彼此电气连接(常常通过传输线)以创建天线175的主体。天线175的主体电耦合到收发器124。被收发器124强制通过天线175的主体的振荡电子流将在该主体周围产生振荡的磁场,同时电子的电荷也产生沿着天线175的主体的振荡电场。这些时变场作为移动的横向RF信号195(通常是电磁场波)从天线175辐射出来进入空间。相反地,在接收期间,传入的RF信号195的振荡电场和磁场对天线175的主体中的电子施加力,致使天线175的主体的部分来回移动,在天线175中产生振荡电流。
在某些示例实施例中,天线175(例如,天线175-1、天线175-N)可被布置在传感器设备102的任何部分处、传感器设备102的任何部分内或传感器设备102的任何部分上面。例如,天线175可被布置在传感器设备102的外壳103的外表面上。作为另一个示例,天线175可以被模制嵌入到传感器设备102的外壳中。作为另一个示例,天线175可以被二次注塑成型到传感器设备102的外壳103中。作为又一个示例,天线175可被胶粘安装到传感器设备102的外壳103上。作为再一个示例,天线175可被印制到传感器设备102的外壳103的外表面上。作为又一个示例,天线175可以是表面安装的片状陶瓷天线。作为再一个示例,天线175可以是线状天线。
每个天线175可耦合(例如,电气地、可通信地)到开关145,该开关145又耦合(例如,电气地、可通信地)到收发器124。开关145可以是单个开关设备或彼此串联和/或并联布置的多个开关设备。在任何特定的时间点处,开关145确定哪一个天线175耦合到收发器124。开关145可具有一个或多个触点,其中每个触点具有断开状态和闭合状态(位置)。在断开状态下,开关145的触点产生开路,这阻止收发器124递送RF信号195到天线175或从天线175接收RF信号195,所述天线175被电气地耦合到开关145的该触点。在闭合状态下,开关145的触点产生闭路,这允许收发器124递送RF信号195到天线175或从天线175接收RF信号195,所述天线175被电气地耦合到开关145的该触点。
在某些示例实施例中,开关145的每个触点的位置被控制器104的控制引擎106控制。如果开关145是单个设备,开关145可具有多个触点。在某些示例实施例中,在任何情况下,在任何时间点处,开关145仅有一个触点可以是有效的(闭合的)。因此,在这样的示例实施例中,当开关145的一个触点闭合时,开关145的所有其他触点都是断开的。
图2图示了计算设备218的一个实施例,该实施例实施了在本文中描述的各种技术中的一个或多个,并且其整体上或者部分地代表依据某些示例性实施例在本文描述的元件。例如,图1中的传感器设备102的控制器104(包括其各种组件,诸如控制引擎106、硬件处理器120以及存储库130)可以被认为是计算设备218。计算设备218是计算设备的一个示例,并且不意图暗示关于计算设备和/或其可能的架构的功能或使用范围的任何限制。计算设备218也不应被解读为具有与在示例计算设备218中图示的组件中的任何一个组件或组件的组合有关的任何依赖性或要求。
计算设备218包括一个或多个处理器或处理单元214、一个或多个存储器/存储组件215、一个或多个输入/输出(I/O)设备216以及允许各种组件和设备互相通信的总线217。总线217代表几种类型的总线结构中的任何类型的一种或多种总线,包括存储器总线或存储器控制器、外围总线、加速图形端口以及使用多种总线架构中的任一种的处理器或本地总线。总线217包括有线和/或无线总线。
存储器/存储组件215代表一种或多种计算机存储介质。存储器/存储组件215包括易失性介质(诸如随机存取存储器(RAM))和/或非易失性介质(诸如只读存储器(ROM))、闪存、光盘、磁盘等等。存储器/存储组件215包括固定介质(例如,RAM,ROM,固定硬盘驱动器等)以及可移动介质(例如,闪存驱动器、可移动硬盘驱动器、光盘等等)。
一个或多个I/O设备216允许客户、公用设施或其他用户将命令和信息录入到计算设备218,并且也允许将信息呈现给客户、公用设施或其他用户和/或其他组件或设备。输入设备的示例包括但不限于键盘、光标控制设备(例如,鼠标)、麦克风、触摸屏以及扫描器。输出设备的示例包括但不限于显示设备(例如,监视器或投影仪)、扬声器、对照明网络的输出(例如,DMX 卡)、打印机以及网卡。
本文在软件或程序模块的通常语境下描述了各种技术。一般地,软件包括执行特定任务或实现特定抽象数据类型的例程、程序、对象、组件、数据结构等等。这些模块和技术的实现被存储在某种形式的计算机可读介质上或跨某种形式的计算机可读介质传输。计算机可读介质是可由计算设备访问的、任何可用的非暂时性的介质。通过示例的方式,并且非限制地,计算机可读介质包括“计算机存储介质”。
“计算机存储介质”和“计算机可读介质”包括以任何方法或技术实现的、用于信息(该信息例如计算机可读指令、数据结构、程序模块或其他数据)的存储的易失性和非易失性、可移除和不可移除的介质。计算机存储介质包括但不限于计算机可记录介质,例如RAM、ROM、EEPROM、闪存或其他存储器技术、CD-ROM、数字多功能盘(DVD)或其他光学存储、磁带盒、磁带、磁盘存储或其他磁性存储设备,或被用来存储所期望的信息且可由计算机访问的任何其他介质。
根据一些示例性实施例,计算机设备218经由网络接口连接(未示出)连接到网络(未示出)(例如,LAN、WAN如因特网,或任何其他的类似类型的网络)。本领域技术人员将领会的是,存在许多不同类型的计算机系统(例如,台式计算机、笔记本电脑、个人多媒体设备、诸如手机或个人数字助理之类的移动设备,或能够执行计算机可读指令的任何其他计算系统),并且在其他示例性实施例中,前述输入和输出装置采用目前公知的或今后研发出的其他形式。一般而言,计算机系统218至少包括实践一个或多个实施例所需的最少的处理、输入和/或输出装置。
此外,在某些示例性实施例中,本领域技术人员将领会的是,前述计算机设备218的一个或多个元件位于远程位置并且通过网络连接到其他元件。此外,一个或多个实施例在具有一个或多个节点的分布式系统上实现,其中这种实现方式的每个部分(例如,控制引擎106)位于该分布式系统内的不同节点上。在一个或多个实施例中,节点对应于计算机系统。可替代地,在一些示例性实施例中,节点对应于具有关联的物理存储器的处理器。在一些示例性实施例中,节点可替代性地对应于具有共享存储器和/或资源的处理器。
图3示出了根据某些示例实施例的系统300,该系统300可使用AoA方法来定位空间体积399中的对象360。参照图1至图3,同样位于图3的空间体积399中的是具有三个天线375(天线375-1、天线375-2以及天线375-3)的传感器设备302。在这种情况下,天线375被印制在传感器设备302的外壳的外表面上。如上文所讨论的,空间体积399可以具有任何尺寸和/或处于任何位置。例如,空间体积399可以是办公楼中的房间。
如图3所示,传感器设备302的全部三个天线375可位于空间体积399中。可替代地,天线375中的一个或多个可位于另一个设备(例如,另一个传感器设备)上。在任何情况下可能的是,多个天线375中的一个或多个可以位于空间体积399的外部,只要由对象360的通信设备390发送的RF信号(例如,RF信号195)被传感器设备302的天线375接收到。
在某些示例实施例中,天线175被一个或多个相邻的天线375隔开一定距离。例如,如图3所示,天线375-1与天线375-2相隔距离378,天线375-3与天线375-2相隔距离379,并且天线375-1与天线375-3相隔距离377。每段距离(在该示例中,距离377、距离378以及距离379)可基于众多因素中的一个或多个。例如,每段距离可以至少是RF信号(例如,RF信号195)的波长的1/4。在这种情况下,一个天线375可发送/接收RF信号,该RF信号与由另一个天线375发送/接收的RF信号至少相差90o的相位。这使得RF信号(以及与它们相关联的信息(例如,角度))更易于解析。作为具体的示例,如果RF信号195的波长是2.4GHz,那么每个距离(距离377、距离378、距离379)至少是大约1/4英寸。一段距离(例如,距离377、距离378、距离379)可以与其他距离相同和/或不同。在其他示例实施例中,每段距离可以小于RF信号的波长的1/4。尽管这个更小的距离可允许更低的精度,但是仍然能够获得足够的准确度以允许对RF信号的可靠解析。
图3中的传感器设备302还包括耦合到所述三个天线375的开关345。尽管未在图3中示出,但是传感器设备302还可包括用于自动地操作开关345的控制引擎(例如,控制引擎106)和用于发送和/或接收RF信号的收发器(例如,收发器124)。此外,图3中的对象360包括通信设备390,其可以与关于图1在上文中所讨论的通信设备190基本相同。例如,如图3所示,图3中的通信设备390可包括天线。在一些情况下,通信设备390也可包括控制器,该控制器可执行在上文中所描述的控制器104的至少一些性能。
图4至图6示出了根据某些示例实施例的、当RF信号由对象360发送并且使用AoA方法来确定对象360的位置时的图3的系统。图4示出了根据某些示例实施例的、其中对象360的通信设备390开始广播RF信号495的图3的系统400。参照图1至图6,传感器设备302的天线375-1、天线375-2以及天线375-3接收RF信号495。对象360的通信设备390具有广播范围482,并且传感器设备302的所有天线375落入广播范围482。
在图4中,开关345在这种情况下对天线375-1是闭合的,并且对天线375-2和天线375-3是断开的。结果,在图4所捕获的时间点处,仅有由天线375-1接收的RF信号495通过开关345被发送到控制器304。当控制器304通过天线375-1接收RF信号495时,控制器304可使用一个或多个算法133和/或协议132来确定角度485,RF信号495在该角度处到达(AoA)天线375-1。
在相对于图4中捕获的时间的一些其他后续时间点处(例如,2ms后,50ms后),传感器设备302的控制器304进行操作,从而得到图5中示出的系统500的配置。在图5中,开关345在这种情况下对天线375-2是闭合的,并且对天线375-1和天线375-3是断开的。结果,在图5所捕获的时间点处,仅有由天线375-2接收的RF信号495通过开关345被发送到控制器304。当控制器304通过天线375-2接收RF信号495时,控制器304可使用一个或多个算法133和/或协议132来确定角度585,RF信号495在该角度处到达(AoA)天线375-2。
在相对于图5中捕获的时间的一些其他后续时间点处(例如,100ns后,3ms后,20ms后),传感器设备302的控制器304进行操作,从而得到图6中示出的系统600的配置。在图6中,开关345在这种情况下对天线375-3是闭合的,并且对天线375-2和天线375-1是断开的。结果,在图6所捕获的时间点处,仅有由天线375-3接收的RF信号495通过开关345被发送到控制器304。当控制器304通过天线375-3接收RF信号495时,控制器304可使用一个或多个算法133和/或协议132来确定角度685,RF信号495在该角度处到达(AoA)天线375-3。
根据示例实施例,一旦控制器304已经确定了角度485和角度585,控制器304可以使用AoA方法确定对象360在空间体积399内的二维位置。根据示例实施例,一旦控制器304已经确定了角度485、角度585和角度685(或者甚至额外的角度,如果传感器设备302具有超过三个天线375的话),控制器304可以使用AoA方法确定对象360在空间体积399内的三维位置。
图7A至图7D示出了根据某些示例实施例的传感器设备702的各种视图。具体而言,图7A示出了传感器设备702的底侧透视图。图7B示出了传感器设备702的不同的底侧透视图。图7C示出了传感器设备702的侧视图。图7D示出了传感器设备702的底视图。
参照图1至图7D,图7A-7D的传感器设备702包括众多特征和/或组件中的一个或多个。例如,传感器设备702包括外壳703,在该外壳的外表面上布置有四个天线775(天线775-1,天线775-2,天线775-3以及天线775-4)。四个天线775以环形样式彼此等间距地布置在外壳703的外表面的中心周围,它们被安置在该外表面上。
在这种情况下,四个天线775具有彼此基本相同的配置(例如,形状、尺寸、厚度)。可替代地, 天线775中的一个天线可具有不同于其他天线775中的至少一个天线的配置。在一些情况下,天线775可以以任何式样安置在外壳703上,包括但不限于非对称地和随意地,而不是彼此对称地布置。
此外,尽管在这个示例中示出了四个天线775,但是在其他的示例实施例中可以有两个、三个或超过四个天线775。当仅有两个天线775时,对象在空间体积中的位置可以在两个维度中确定。当存在三个或更多天线775时,对象在空间体积中的位置可以在三个维度中确定。一个天线775可由(多种)相同的材料制成,或由相较于一个或多个其他天线775的材料不同的(多种)材料制成。此外,一个天线775耦合到和/或安置在外壳703上的方式可以与其他天线775中的一个或多个天线耦合到和/或安置在外壳703上的方式相同或者不同。
图8示出了其中可使用图7A-7D中的示例传感器设备702的系统。参照图1至图8,除了传感器设备702之外,系统800还包括安置在空间体积899中的各种对象460。具体而言,对象460-1、对象460-2、对象460-3以及对象460-4是文件柜。对象460-5、对象460-6、对象460-7、对象460-8以及对象460-9是桌子。对象460-10是人。对象460-11、对象460-12以及对象460-13是墙壁。对象460-14和对象460-15是门。
在空间体积899中也存在众多设备887。具体而言,设备887-1、设备887-2、设备887-3、设备887-4、设备887-5、设备887-6、设备887-7、设备887-8、设备887-9、设备887-10以及设备887-11是灯具。设备887-12是出口标志。设备887-13是恒温器。设备887-14、设备887-15以及设备887-16是灯开关。设备887-17、设备887-18、设备887-19、设备887-20以及设备887-21是电气插座。设备887-22是隔间墙。
传感器设备702在这种情况下被安置在靠近设备887-4、设备887-5和设备887-10、以及对象860-13的天花板上。在替代的实施例中,传感器设备702可以与对象860或设备887集成。例如,传感器设备702可以与设备887-4的外壳集成,设备887-4是安装在天花板上的灯具。作为另一个示例,传感器设备702可以与设备887-13的面板集成,设备887-13是恒温器。作为又一个示例,传感器设备702可以与对象860-13集成,对象860-13是墙壁。
示例实施例可以针对于传感器设备,该传感器设备包括被安置在该传感器设备的外壳的外表面上的多个天线。一个天线可以以相较于该传感器设备的其余天线中的一个或多个天线相同的方式或不同的方式被安置在外壳上。例如,天线可以被模制嵌入到外壳的外表面中。作为另一个示例,天线可以被注塑成型到外壳的外表面中。作为又一个示例,天线可被胶粘安装到外壳的外表面上。作为再一个示例,天线可被印制到外壳的外表面上。
此外,传感器设备的天线可以由众多不同材料中的任何材料制成和/或具有众多不同配置中的任何配置。例如,天线可以是安装到外壳的外表面的片状陶瓷天线。
在一个或多个示例实施例中,传感器设备在其上安置有可被用来定位空间体积中的对象的多个天线,所述对象与该传感器设备共享所述空间体积。如果使用两个天线,对象的位置可以在两个维度中限定。如果使用三个或更多天线,对象的位置可以在三个维度中限定。示例实施例可提供空间体积中的对象的实时定位。使用在本文中所描述的实施例可以改善通信、安全、维护、 成本以及操作效率。
相应地,受益于前述说明和相关附图中给出的教导,具有用于对象的多维度定位的多个天线的传感器所涉及的领域中的技术人员将想到本文所阐述的许多修改和其他实施例。因此,将理解到的是,具有用于对象的多维度定位的多个天线的传感器不限于所公开的特定实施例,并且修改和其他实施例意图被包含在本申请的范围内。虽然在本文中采用了特定的术语,但是它们仅仅是以一般的和描述性的意义使用的,而不是为了限制的目的。
Claims (15)
1.一种用于定位空间体积中的对象的系统,包括:
包含多个天线的传感器设备;
耦合到所述多个天线的开关;以及
可通信地耦合到所述开关的控制器,其中,所述控制器:
在第一时间处测量在所述多个天线中的第一天线处接收的信号的第一角度,其中所述信号的所述第一角度与所述对象的位置相关联;
将所述开关从第一位置操作至第二位置,其中所述第一位置启用所述第一天线,并且其中所述第二位置启用所述多个天线中的第二天线;
在第二时间处测量在所述多个天线中的所述第二天线处接收的所述信号的第二角度,其中所述信号的所述第二角度与所述对象的所述位置相关联;并且
使用所述第一角度和所述第二角度确定所述空间体积中的所述对象的多维度位置。
2.根据权利要求1所述的系统,其中所述控制器还:
将所述开关从所述第二位置操作至第三位置,其中所述第三位置启用所述多个天线中的第三天线;
测量所述多个天线中的所述第三天线处的所述信号的第三角度,其中所述信号的所述第三角度与所述对象的所述位置相关联;并且
使用所述第一角度、所述第二角度和所述第三角度确定所述空间体积中的所述对象的三维度位置。
3.根据权利要求1所述的系统,其中所述信号是射频信号。
4.根据权利要求1所述的系统,其中所述第一天线和所述第二天线相隔的距离至少为所述第一信号的波长的1/4。
5.根据权利要求1所述的系统,其中所述对象发起所述信号。
6.根据权利要求1所述的系统,其中在检测到所述第一天线已经接收到由所述对象广播的所述信号时,所述控制器将所述开关从所述第一位置操作至所述第二位置。
7.根据权利要求1所述的系统,其中由所述对象广播的所述信号包含所述对象的标识。
8.根据权利要求1所述的系统,其中使用到达角方法、基于所述第一角度和所述第二角度确定所述对象的所述多维度位置。
9.根据权利要求1所述的系统,其中所述多个天线中的至少一个天线与所述传感器设备的外表面集成。
10.根据权利要求1所述的系统,其中所述多个天线中的至少一个天线从所述传感器设备的外表面伸出。
11.根据权利要求1所述的系统,其中所述传感器设备测量用于操作照明系统的至少一个参数。
12.根据权利要求11所述的系统,其中所述传感器设备耦合到照明系统中的灯具。
13.一种传感器设备,包括:
外壳;
被安置在所述外壳的外表面上的多个天线;
耦合到所述多个天线的开关;以及
可通信地耦合到所述开关的控制器,其中所述控制器被配置成:
在第一时间处测量在所述多个天线中的第一天线处接收的信号的第一角度,其中所述信号的所述第一角度与所述对象的位置相关联;
将所述开关从第一位置操作至第二位置,其中所述第一位置启用所述第一天线,并且其中所述第二位置启用所述多个天线中的第二天线;
在第二时间处测量在所述多个天线中的所述第二天线处接收的所述信号的第二角度,其中所述信号的所述第二角度与所述对象的所述位置相关联;并且
使用所述第一角度和所述第二角度确定所述空间体积中的所述对象的多维度位置。
14.根据权利要求13所述的传感器设备,其中所述控制器被安置在所述外壳内。
15.根据权利要求13所述的传感器设备,其中所述第一天线和所述第二天线具有相对于彼此基本上类似的配置,并且彼此相隔最小的距离。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201862649407P | 2018-03-28 | 2018-03-28 | |
| US62/649407 | 2018-03-28 | ||
| PCT/EP2019/025092 WO2019185205A2 (en) | 2018-03-28 | 2019-03-27 | Sensors with multiple antennae used for multi-dimensional location of an object |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN112074752A true CN112074752A (zh) | 2020-12-11 |
Family
ID=66092286
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201980023190.XA Withdrawn CN112074752A (zh) | 2018-03-28 | 2019-03-27 | 具有用于对象的多维度定位的多个天线的传感器 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10965388B2 (zh) |
| EP (1) | EP3775968A2 (zh) |
| JP (1) | JP2021519416A (zh) |
| CN (1) | CN112074752A (zh) |
| WO (1) | WO2019185205A2 (zh) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20220206136A1 (en) * | 2020-12-31 | 2022-06-30 | Thales Canada Inc. | Method and system for high-integrity vehicle localization |
| US20220320900A1 (en) * | 2021-04-05 | 2022-10-06 | Baker Hughes Oilfield Operations Llc | Sensing system and associated components and methods |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101273564A (zh) * | 2005-08-19 | 2008-09-24 | 三菱电机研究实验室 | 对具有错误反馈的发射天线选择的信令优化和选择验证 |
| WO2014131074A1 (en) * | 2013-02-28 | 2014-09-04 | Locamate Pty Ltd | System and method for determining a user device location |
| US20140327579A1 (en) * | 2013-05-03 | 2014-11-06 | Cisco Technology, Inc. | Angle of arrival location sensing with antenna array |
| US20160240492A1 (en) * | 2013-12-09 | 2016-08-18 | Intel Corporation | Antenna on ceramics for a packaged die |
| US20170094753A1 (en) * | 2015-09-30 | 2017-03-30 | Cooper Technologies Company | Light Fixtures with Integrated Control |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6784826B2 (en) | 2001-01-26 | 2004-08-31 | Tera Research Incorporated | Body motion tracking system |
| US6456242B1 (en) * | 2001-03-05 | 2002-09-24 | Magis Networks, Inc. | Conformal box antenna |
| US6933909B2 (en) * | 2003-03-18 | 2005-08-23 | Cisco Technology, Inc. | Multichannel access point with collocated isolated antennas |
| US7119744B2 (en) * | 2004-01-20 | 2006-10-10 | Cisco Technology, Inc. | Configurable antenna for a wireless access point |
| US7265675B1 (en) | 2005-03-01 | 2007-09-04 | Alien Technology Corporation | Multistatic antenna configuration for radio frequency identification (RFID) systems |
| EP2423847B1 (en) | 2010-08-27 | 2013-03-27 | Psion Inc. | System and method for multiple reading interface with a simple RFID antenna |
| JP2012100027A (ja) | 2010-11-01 | 2012-05-24 | Buffalo Inc | 無線lanシステム |
| US20120302261A1 (en) | 2010-11-29 | 2012-11-29 | Qualcomm Incorporated | Control schemes for determining access terminal location |
| US20130170374A1 (en) | 2011-12-28 | 2013-07-04 | Aeroscout Ltd. | Methods and systems for locating devices |
| US8862067B2 (en) | 2012-03-27 | 2014-10-14 | Microsoft Corporation | Proximate beacon identification |
| FI2677335T3 (fi) | 2012-06-21 | 2023-01-13 | Paikannusjärjestelmän paikannustarkkuuden parantaminen | |
| US10104493B2 (en) | 2013-10-08 | 2018-10-16 | Mediatek Singapore Pte Ltd | Multiple antenna AP positioning in wireless local area networks |
| CA2931526C (en) * | 2013-11-25 | 2022-04-19 | Abl Ip Holding Llc | System and method for communication with a mobile device via a positioning system including rf communication devices and modulated beacon light sources |
| GB201401580D0 (en) | 2014-01-30 | 2014-03-19 | Ucl Business Plc | Apparatus and method for calibrating a wireless access point comprising an array of multiple antennas |
| JP6411831B2 (ja) * | 2014-09-18 | 2018-10-24 | 株式会社Soken | 到来方向推定装置、位置推定装置、位置推定システム |
| US9733335B2 (en) | 2014-11-13 | 2017-08-15 | Symbol Technologies, Llc | RFID tag locationing using dynamic beacon tag association |
| EP3073284A1 (en) | 2015-03-27 | 2016-09-28 | Assa Abloy AB | Method, device, computer program and computer program product for determining whether a portable key device is located in an active area in relation to a barrier |
| US20180096179A1 (en) | 2016-10-05 | 2018-04-05 | International Business Machines Corporation | Medical asset sensing and tracking |
| US10422848B1 (en) | 2018-03-09 | 2019-09-24 | Abl Ip Holding Llc | More accurate asset tag locating of radio frequency devices |
-
2019
- 2019-03-27 WO PCT/EP2019/025092 patent/WO2019185205A2/en unknown
- 2019-03-27 JP JP2020551525A patent/JP2021519416A/ja active Pending
- 2019-03-27 CN CN201980023190.XA patent/CN112074752A/zh not_active Withdrawn
- 2019-03-27 EP EP19716070.8A patent/EP3775968A2/en not_active Withdrawn
- 2019-03-28 US US16/368,519 patent/US10965388B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101273564A (zh) * | 2005-08-19 | 2008-09-24 | 三菱电机研究实验室 | 对具有错误反馈的发射天线选择的信令优化和选择验证 |
| WO2014131074A1 (en) * | 2013-02-28 | 2014-09-04 | Locamate Pty Ltd | System and method for determining a user device location |
| US20140327579A1 (en) * | 2013-05-03 | 2014-11-06 | Cisco Technology, Inc. | Angle of arrival location sensing with antenna array |
| US20160240492A1 (en) * | 2013-12-09 | 2016-08-18 | Intel Corporation | Antenna on ceramics for a packaged die |
| US20170094753A1 (en) * | 2015-09-30 | 2017-03-30 | Cooper Technologies Company | Light Fixtures with Integrated Control |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2021519416A (ja) | 2021-08-10 |
| US10965388B2 (en) | 2021-03-30 |
| WO2019185205A2 (en) | 2019-10-03 |
| WO2019185205A3 (en) | 2019-11-07 |
| US20190305858A1 (en) | 2019-10-03 |
| EP3775968A2 (en) | 2021-02-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11115950B2 (en) | Location services using multiple light fixtures | |
| CN110832339B (zh) | 使用多个天线对对象进行多维定位 | |
| US11754661B2 (en) | Location services using a light fixture | |
| US20200404357A1 (en) | Electrical Device Control Using Passive Tags | |
| US20190301689A1 (en) | Configurable And Modular Light Fixtures | |
| US10965388B2 (en) | Sensors with multiple antennae used for multi-dimensional location of an object | |
| US20200355784A1 (en) | Multi-Dimensional Location Of An Object Using Multiple Electrical Devices | |
| US11159257B2 (en) | Wireless organization of electrical devices using broadcast signals | |
| US20210095841A1 (en) | Antenna Assemblies For Light Fixtures | |
| US11170596B2 (en) | Real-time location of an object using multiple electrical devices | |
| US20220299591A1 (en) | Location system congestion management | |
| US20230076267A1 (en) | Real-time location of an object using radio frequency and infrared signals | |
| WO2021165185A1 (en) | Real-time location of an object using multiple electrical devices | |
| US20230046359A1 (en) | Hmo production | |
| WO2021130120A1 (en) | Alternative identification of objects for constrained networks | |
| US20210204134A1 (en) | Real-Time Detection and Location Of Illegitimate Communication Tags |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| WW01 | Invention patent application withdrawn after publication |
Application publication date: 20201211 |
|
| WW01 | Invention patent application withdrawn after publication |