CN111238552B - 基于深度学习的分布式光纤传感系统扰动定位方法 - Google Patents
基于深度学习的分布式光纤传感系统扰动定位方法 Download PDFInfo
- Publication number
- CN111238552B CN111238552B CN202010122081.8A CN202010122081A CN111238552B CN 111238552 B CN111238552 B CN 111238552B CN 202010122081 A CN202010122081 A CN 202010122081A CN 111238552 B CN111238552 B CN 111238552B
- Authority
- CN
- China
- Prior art keywords
- disturbance
- vector
- deep learning
- training
- optical fiber
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000013135 deep learning Methods 0.000 title claims abstract description 20
- 239000013307 optical fiber Substances 0.000 title claims abstract description 16
- 238000000034 method Methods 0.000 title claims abstract description 9
- 230000004807 localization Effects 0.000 title abstract 2
- 238000001228 spectrum Methods 0.000 claims abstract description 19
- 238000013528 artificial neural network Methods 0.000 claims abstract description 11
- 238000004088 simulation Methods 0.000 abstract description 2
- 239000000835 fiber Substances 0.000 description 4
- 238000012544 monitoring process Methods 0.000 description 4
- 238000003062 neural network model Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 230000009545 invasion Effects 0.000 description 1
- 238000013178 mathematical model Methods 0.000 description 1
Images


Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/353—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells influencing the transmission properties of an optical fibre
- G01D5/35338—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells influencing the transmission properties of an optical fibre using other arrangements than interferometer arrangements
- G01D5/35341—Sensor working in transmission
- G01D5/35351—Sensor working in transmission using other means to detect the measured quantity
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optical Transform (AREA)
Abstract
本发明公开了一种基于深度学习的分布式光纤传感系统扰动定位方法,从位相差公式出发,基于仿真得到不同扰动情况下的陷波频谱,并以此建立多维输入向量。以扰动数量和扰动位置建立实际标签向量作为正确输出向量,在此基础上经过训练建立深度学习神经网络的学习模型。本发明优点:可以解决多点扰动下Sagnac分布式光纤传感的定位难题。
Description
技术领域
本发明涉及定位技术领域,具体涉及一种基于深度学习的分布式光纤传感系统扰动定位方法。
背景技术
Sagnac分布式光纤传感系统具有低成本和广阔的应用前景,可用于管道泄漏及入侵的监测、可用于周界安防的监测、可用于地铁隧道的健康监测、可用于海洋声信号的监测,对保障人民的生命、财产安全具有重要的意义。
在Sagnac分布式光纤传感系统中,最常用的定位方法是基于陷波频率的方案。对于多扰动的情况,每一个陷波频率都与所有的扰动点的位置和强度有关,这时,无法建立起陷波频率的数学公式。因此,无法根据某一数学公式由陷波频率计算出扰动位置。
深度学习神经网络建立模型的核心思想是在不容易建立公式和规则的情况下,使用训练的数据、并通过合适的算法构建出一个模型。因此深度学习神经网络正好可以用于Sagnac分布式光纤传感中多扰动信号的定位问题。本专利就是基于深度学习神经网络解决这些情况下扰动信号的定位问题。
发明内容
本发明所要解决的问题是:提供一种基于深度学习的分布式光纤传感系统扰动定位方法,以解决多个位置点同时出现扰动时的定位失效问题。
本发明为解决上述问题所提供的技术方案为:基于Sagnac分布式光纤传感系统的原理,从位相差公式出发,基于仿真得到不同扰动情况下的陷波频谱,并以此建立多维输入向量,以不同扰动的情况(扰动数量和扰动位置)建立正确输出向量,在此基础上经过训练建立深度学习神经网络的学习模型。具体步骤如下:
(1)根据Sagnac分布式光纤传感中的位相差公式,获取已知多扰动信号作用下的陷波频谱;
Sagnac分布式光纤传感中的位相差公式为:

A表示扰动信号与光纤作用的强弱,Lsj是第j个扰动的位置,ωji是第j个扰动的第i个频率,Bji是第j个扰动的第i个频率处的幅度,n是光纤的折射率,c是光的传播速率,Ld是Sagnac分布式光纤传感系统中非平衡马赫曾德尔干涉仪中两个臂的长度差,τt是光沿Sagnac分布式光纤传感系统从入射到返回所用的时间。由位相差函数,用matlab可以得到位相差的陷波频谱。
(2)忽略陷波频谱的幅度,将陷波频谱转化为一维向量,其中陷波点处的频率记为1,否则记为0。则由不同的扰动数量和位置时的陷波频谱可建立多维输入向量XM,N;
(3)以扰动数量和扰动位置建立实际标签向量作为正确输出向量DM,K;
(4)将多维的输入向量通过深度学习神经网络进行训练。
(5)计算正确输出向量DM,K和每一次的训练输出向量YM,K的误差,如果误差大于某一设定值,根据随机梯度下降等算法修正权重,回到第(4)步重新训练,直到误差小于某一设定值,停止训练,至此,深度学习神经网络模型已经建好。
(6)将实际环境中测到的陷波频谱转化为一维向量后输入到已经训练好的深度学习神经网络中,得到正确的输出向量,至此可得到扰动数量和扰动位置。
与现有技术相比,本发明的优点是:本发明可以解决无法建立起数学模型的多扰动定位问题。
附图说明
此处所说明的附图用来提供对本发明的进一步理解,构成本发明的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
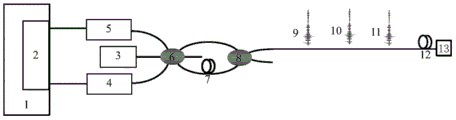
图1是实施例所采用的系统结构图;图1中:1为计算机;2为双通道数据采集卡;3为光源;4为光电探测器1;5为光电探测器2;6为3×3耦合器;7为第1光纤延迟线;8为3dB耦合器;9为第1扰动信号;10为第2扰动信号;11为第3扰动信号;12为第2光纤延迟线;13为法拉第反射镜。
图2是一种特殊扰动情形,即三个相同的扰动同时作用在50km、40km、和20km位置上时的陷波频谱。
图3是深度学习神经网络模型。
具体实施方式
实施例
(1)根据Sagnac分布式光纤传感中的位相差公式,获取已知多扰动信号作用下的陷波频谱;
(2)忽略陷波频谱的幅度,将陷波频谱转化为一维向量,其中陷波点处的频率记为1,否则记为0。则由不同的扰动数量和位置时的陷波频谱可建立多维输入向量XM,N;
(3)以扰动数量和扰动位置建立实际标签向量作为正确输出向量DM,K;
(4)将多维的输入向量通过深度学习神经网络进行训练。
(5)计算正确输出向量DM,K和每一次训练的输出向量YM,K的误差,如果误差大于某一设定值,根据随机梯度下降等算法修正权重,回到第(4)步重新训练,直到误差小于某一设定值,停止训练,至此,深度学习神经网络模型已经建好。
(6)将实际环境中测到的陷波频谱转化为一维向量后输入到已经训练好的深度学习神经网络中,得到正确的输出向量,至此可得到扰动数量和扰动位置。
Claims (1)
1.一种基于深度学习的分布式光纤传感系统扰动定位方法,其特征在于:所述方法包括以下步骤,
(1)、获取已知扰动位置和扰动信号作用下的陷波频谱;
(2)、忽略陷波频谱的幅度,将陷波频谱转化为一维向量,其中陷波点处的频率记为1,否则记为0;则由不同的扰动数量和位置时的陷波频谱可建立多维输入向量,并按一定的比例分为训练集和测试集;
(3)、将已知的扰动数量和扰动位置建立实际标签向量作为正确输出向量;
(4)、将多维的输入向量通过深度学习神经网络进行训练,得到训练输出向量;
(5)、计算正确输出向量和训练输出向量之差,当其值大于某一设定值时,根据随机梯度下降算法修正权重,并回到第(4)步,直到正确输出向量和训练输出向量之差小于某一设定值,训练结束;
(6)、将实际测到的陷波频谱转化为一维向量后输入到已经训练好的深度学习神经网络中,则可得到扰动数量和扰动位置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010122081.8A CN111238552B (zh) | 2020-02-27 | 2020-02-27 | 基于深度学习的分布式光纤传感系统扰动定位方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010122081.8A CN111238552B (zh) | 2020-02-27 | 2020-02-27 | 基于深度学习的分布式光纤传感系统扰动定位方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN111238552A CN111238552A (zh) | 2020-06-05 |
| CN111238552B true CN111238552B (zh) | 2021-06-22 |
Family
ID=70862895
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202010122081.8A Active CN111238552B (zh) | 2020-02-27 | 2020-02-27 | 基于深度学习的分布式光纤传感系统扰动定位方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN111238552B (zh) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112161778B (zh) * | 2020-08-17 | 2022-08-02 | 南昌航空大学 | 基于回归概率分布的分布式光纤扰动定位方法 |
| CN112539772B (zh) * | 2020-11-02 | 2023-04-07 | 上海大学 | 一种基于卷积神经网络集成学习的Sagnac分布光纤传感系统的定位方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB201113381D0 (en) * | 2011-06-06 | 2011-09-21 | Silixa Ltd | Method and system for locating an acoustic source |
| CN105277272A (zh) * | 2015-10-25 | 2016-01-27 | 复旦大学 | 分布式光纤振动传感多点扰动定位算法 |
| CN110057387A (zh) * | 2019-05-10 | 2019-07-26 | 南昌航空大学 | 直线型Sagnac分布式光纤传感系统的定位方法 |
| CN110146116A (zh) * | 2019-06-19 | 2019-08-20 | 南昌航空大学 | 一种多点扰动下Sagnac光纤传感的定位方法 |
| CN110686166A (zh) * | 2019-10-21 | 2020-01-14 | 上海大学 | Sagnac分布光纤传感系统的离散化定位方法 |
| CN110823356A (zh) * | 2019-10-09 | 2020-02-21 | 威海北洋光电信息技术股份公司 | 基于梅尔频谱的分布式光纤入侵检测方法 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2525251A (en) * | 2014-04-18 | 2015-10-21 | Mic Ag | Optical fibre sensor system |
-
2020
- 2020-02-27 CN CN202010122081.8A patent/CN111238552B/zh active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB201113381D0 (en) * | 2011-06-06 | 2011-09-21 | Silixa Ltd | Method and system for locating an acoustic source |
| CN105277272A (zh) * | 2015-10-25 | 2016-01-27 | 复旦大学 | 分布式光纤振动传感多点扰动定位算法 |
| CN110057387A (zh) * | 2019-05-10 | 2019-07-26 | 南昌航空大学 | 直线型Sagnac分布式光纤传感系统的定位方法 |
| CN110146116A (zh) * | 2019-06-19 | 2019-08-20 | 南昌航空大学 | 一种多点扰动下Sagnac光纤传感的定位方法 |
| CN110823356A (zh) * | 2019-10-09 | 2020-02-21 | 威海北洋光电信息技术股份公司 | 基于梅尔频谱的分布式光纤入侵检测方法 |
| CN110686166A (zh) * | 2019-10-21 | 2020-01-14 | 上海大学 | Sagnac分布光纤传感系统的离散化定位方法 |
Non-Patent Citations (3)
| Title |
|---|
| Intelligent detection technology for leakage bag of baghouse based on distributed optical fiber sensor;X.N.Liu等;《optical fiber technology》;20190710;全文 * |
| 基于神经网络的光纤传感损伤定位的研究;杨艳;《武汉理工大学学报信息与管理工程版》;20061130;第28卷(第11期);全文 * |
| 基于随机神经网络的光纤振动信号识别算法研究;孙成斌;《中国优秀硕士学位论文全文数据库电子期刊》;20190731;全文 * |
Also Published As
| Publication number | Publication date |
|---|---|
| CN111238552A (zh) | 2020-06-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100510633C (zh) | 一种基于神经网络进行温度补偿的光纤陀螺 | |
| CN120611329B (zh) | 一种水利工程大坝安全监测预警方法及系统 | |
| Yan et al. | Mixed intrusion events recognition based on group convolutional neural networks in DAS system | |
| CN111238552B (zh) | 基于深度学习的分布式光纤传感系统扰动定位方法 | |
| CN110487391A (zh) | 基于ai芯片的智能光纤分布式声波传感系统及方法 | |
| CN104613923A (zh) | 一种变形监测安全评估系统及评估方法 | |
| CN107884060B (zh) | 一种光纤分布式传感探测方法及装置 | |
| CN111539393B (zh) | 基于emd分解与lstm的油气管道第三方施工预警方法 | |
| CN103995468B (zh) | 基于遗传算法的光纤扰动系统的偏振控制方法及其装置 | |
| CN110686166A (zh) | Sagnac分布光纤传感系统的离散化定位方法 | |
| CN120145889B (zh) | 一种基于强化学习驱动的洞室群分布式光纤温度场动态监测系统 | |
| Lai et al. | Disturbance location and pattern recognition of a distributed optical fiber sensor based on dual-Michelson interferometers | |
| CN119848440A (zh) | 基于自注意力循环神经网络的布里渊温度提取方法及系统 | |
| CN112539772B (zh) | 一种基于卷积神经网络集成学习的Sagnac分布光纤传感系统的定位方法 | |
| CN110057387A (zh) | 直线型Sagnac分布式光纤传感系统的定位方法 | |
| CN120180099B (zh) | 基于双折射fbg的光纤环境事件识别方法 | |
| Lalam et al. | Recent development in artificial neural network based distributed fiber optic sensors | |
| CN112161778B (zh) | 基于回归概率分布的分布式光纤扰动定位方法 | |
| CN103322926B (zh) | 信号传输过程中的周期性非线性误差或干扰消除法 | |
| CN110146116B (zh) | 一种多点扰动下Sagnac光纤传感的定位方法 | |
| CN115169540A (zh) | 基于分布式类脑图的深度学习计算框架缺陷溯源方法 | |
| Yan et al. | Detection of distorted interference pulses for UWFBG array based on odd function decomposition | |
| CN118687603B (zh) | 一种基于全连接神经网络的光纤信号解调算法 | |
| Zhou et al. | Demodulation method for vibration sensors of ultra-weak fiber Bragg grating using a Self-Referencing signal based on DBNs with ensemble learning | |
| Todd | On the probability structure of output noise from a digital phase demodulation system subject to biased intensity-based input noise |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |