CN111145552B - 基于5g网络的车辆动态换道轨迹的规划方法 - Google Patents
基于5g网络的车辆动态换道轨迹的规划方法 Download PDFInfo
- Publication number
- CN111145552B CN111145552B CN202010011237.5A CN202010011237A CN111145552B CN 111145552 B CN111145552 B CN 111145552B CN 202010011237 A CN202010011237 A CN 202010011237A CN 111145552 B CN111145552 B CN 111145552B
- Authority
- CN
- China
- Prior art keywords
- vehicle
- lane change
- track
- lane
- gru network
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/21—Design or setup of recognition systems or techniques; Extraction of features in feature space; Blind source separation
- G06F18/214—Generating training patterns; Bootstrap methods, e.g. bagging or boosting
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/045—Combinations of networks
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/30—Services specially adapted for particular environments, situations or purposes
- H04W4/40—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P]
- H04W4/46—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P] for vehicle-to-vehicle communication [V2V]
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Data Mining & Analysis (AREA)
- Evolutionary Computation (AREA)
- Life Sciences & Earth Sciences (AREA)
- Artificial Intelligence (AREA)
- General Engineering & Computer Science (AREA)
- Computing Systems (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Molecular Biology (AREA)
- Computational Linguistics (AREA)
- Biophysics (AREA)
- Biomedical Technology (AREA)
- Mathematical Physics (AREA)
- Software Systems (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Bioinformatics & Computational Biology (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Evolutionary Biology (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Traffic Control Systems (AREA)
Abstract
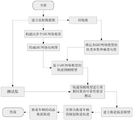
一种基于5G网络的车辆动态换道轨迹的规划方法,包括以下步骤:1)通过优秀驾驶员在实际道路环境中进行换道试验,得到连续的周围车辆的行驶轨迹点作为原始数据集;2)构建出多个GRU网络模型,组成用于预测周围车辆的行驶轨迹的GRU网络结构图;3)将步骤1)得到的原始数据集分为训练集和测试集;3‑1)利用训练集确定各GRU网络模型的权重参数和偏置向量,得到基于GRU网络模型的轨迹预测模型;3‑2)利用测试集对基于GRU网络模型的轨迹预测模型进行预测结果的可靠性验证测试;4)建立换道场景模型;5)计算出换道车辆的换道规划轨迹;6)根据实时交通流情况重复步骤2)到步骤5),进行滚动计算得到实时响应周围交通流变化的换道车辆的动态换道轨迹。
Description
技术领域
本发明涉及汽车领域,具体涉及一种基于5G网络的车辆动态换道轨迹的规划方法。
背景技术
车辆换道行为的可靠性、安全性和效率与车辆的行驶安全性和道路通畅有着紧密的关系。因此,智能车辆换道行为的研究一直是自动驾驶的关键之一。
自动驾驶汽车需要具备预测周围车辆运动轨迹的能力,进而为无人驾驶汽车的行为决策和轨迹规划提供参考,进而充分确保无人驾驶汽车的安全性和舒适性。目前关于换道轨迹规划的研究中普遍对换道的实时性和安全性考虑不足。主要体现在以下几个方面:第一,现有研究中的换道轨迹规划场景比较简单,大都假设在换道过程中换道车辆周围的车辆速度保持不变,且换道车辆周围车辆较少;第二,换道轨迹的规划大都在换道开始前完成,对换道过程中周围车辆运动状态的实时变化考虑不足,导致按换道前规划好的轨迹进行换道操作存在潜在碰撞危险;第三,未考虑周围车辆未来运动轨迹对换道车辆轨迹规划的影响,导致规划的轨迹不适应周围车辆未来运动轨迹的变化,进而对换道的安全性构成威胁。
发明内容
本发明的目的是针对现有技术对应的不足,提供一种基于5G网络的车辆动态换道轨迹的规划方法,利用5G网络的大带宽、低时延和车对车通信系统(V2V)实时、准确获取换道车辆周围的车辆的状态信息,建立GRU(Gate Recurrent Unit)网络模型预测周围车辆运动轨迹,通过对换道安全性、换道效率、换道舒适性三个指标来计算换道车辆的最优动态换道轨迹,使换道车辆在复杂多变的真实交通场景下实现动态换道轨迹规划,提高换道车辆的换道规划的实时性、安全性和可靠性。
本发明的目的是采用下述方案实现的:一种基于5G网络的车辆动态换道轨迹的规划方法,包括以下步骤:
1)通过优秀驾驶员在实际道路环境中进行换道试验,利用5G网络通过全球定位系统和车对车通信系统(V2V)采集换道车辆周围的车辆的行驶轨迹数据,对换道车辆和周围车辆的轨迹坐标进行坐标统一化,得到连续的周围车辆的行驶轨迹点作为原始数据集;
2)在步骤1)得到的原始数据集的数据中,将t时刻前n个时间段(t-n+1,t-n+2,…,t)的数据作为GRU网络模型的输入,t+1时刻的数据作为GRU网络模型的输出,构建出多个GRU网络模型,组成用于预测周围车辆的行驶轨迹的GRU网络结构图;
3)将步骤1)得到的原始数据集分为训练集和测试集;
3-1)通过训练集的数据训练步骤2)得到的GRU网络结构图中的各GRU网络模型,确定各GRU网络模型的权重参数和偏置向量,得到基于GRU网络模型的轨迹预测模型;
3-2)利用测试集的数据对步骤3-1)得到的基于GRU网络模型的轨迹预测模型进行预测结果的可靠性验证测试;
4)将步骤3-1)中通过预测结果的可靠性验证测试的基于GRU网络模型的轨迹预测模型作为换道车辆的换道决策和轨迹规划的约束条件,并建立换道场景模型;
5)利用步骤4)建立的换道场景模型中满足约束条件的代价函数构建换道车辆的动态换道轨迹规划模型,计算出换道车辆的换道规划轨迹;
6)将换道车辆的换道规划轨迹的用时分成若干时间步长,每一个时间步长中换道车辆根据实时交通流情况采集周围车辆的行驶轨迹数据,重复步骤2)到步骤5)进行滚动计算,得到每一个时间步长内的实时换道规划轨迹,并将各时间步长的实时换道规划轨迹进行组合,得到实时响应周围交通流变化的换道车辆的动态换道轨迹。
步骤1)中所述的行驶轨迹数据为t时刻车辆的状态信息,包括位置信息和速度信息,即(xt,yt,vt)。
步骤2)中所述的GRU网络模型由以下公式表示:
zt=sigmoid(Wz·[ht-1,xt])
rt=sigmoid(Wr·[ht-1,xt])


式中,rt表示GRU网络模型的重置门,zt表示GRU网络模型的更新门,xt表示当前节点的输入, 表示当前节点输出的候选隐藏状态,ht表示当前节点输出的隐藏状态。
表示当前节点输出的候选隐藏状态,ht表示当前节点输出的隐藏状态。
步骤3-1)中确定各GRU网络模型的权重参数和偏置向量的步骤如下:
首先初始化GRU网络的权重参数和偏置向量,使用初始学习率将步骤3)得到的训练集的数据送入GRU网络模型进行训练处理,取t时刻前n个时间段的数据作为样本数据,取t+1时刻的数据作为标签数据,采用梯度下降法(Gradient Descent Optimization)最小化GRU网络模型的损失函数,多次迭代后,完成GRU网络模型的训练,得到GRU网络模型的权重参数和偏置向量。
步骤5)中所述的满足约束条件的代价函数如下:
cost=f(xf,j)
式中,xf为车辆最小化换道的纵向距离,j为车辆加速度的变化值。
所述代价函数中xf满足以下公式作为约束条件:

式中,
yf为换道纵向距离,u为车辆速度,arlmax为换道车辆侧翻的最大侧向加速度。
步骤5)中所述的计算出换道车辆的换道轨迹的方法采用的是内点法。
本发明通过优秀驾驶员(即拥有C1驾照超过3年,且未发生过交通违章及事故的驾驶员)在实际道路环境中进行换道试验,利用5G网络的大带宽、低时延的特点通过全球定位系统使车对车通信系统(V2V)实时、准确获取换道车辆周围的车辆的状态信息,即换道车辆实时获取对周围交通流的的运动轨迹和状态信息,坐标统一化换道车辆和周围车辆的轨迹坐标,得到连续的周围车辆的行驶轨迹点作为原始数据集,并利用原始数据集的数据构建出多个GRU网络模型,组成用于预测周围车辆的行驶轨迹的GRU网络结构图。
GRU网络模型是循环神经网络(Recurrent Neural Network,RNN)的一种,解决了长期记忆和反向传播中的梯度等问题,对计算机内存的要求低,更容易训练,所以本发明通过构建GRU网络模型,解决了标准RNN的梯度消失问题,在保证快速学习的基础上对周围车辆的轨迹进行预测,为换道车辆的换道轨迹规划提供了安全可靠的保障,最大程度的避免了换道车辆在换道过程中存在的危险。
本发明中的GRU网络模型是根据原始数据集中t时刻前n个时间段(t-n+1,t-n+2,…,t)的周围车辆的行驶轨迹数据(全局坐标和速度)来预测t+1时刻的周围车辆的行驶轨迹,步骤1)中所述的行驶轨迹数据为t时刻车辆的状态信息,包括位置信息和速度信息,即(xt,yt,vt),最大程度反应换道车辆周围交通流的实际情况,为建立GRU网络模型提供准确的数据支持。
由于换道过程至少涉及两个相邻车道,从而在换道过程中会影响道路的通行效率,车辆最小化换道的纵向距离xf会降低换道所带来对交通效率的影响,所以选择车辆最小化换道的纵向距离xf来描述换道效率;由于换道过程中存在速度和加速度的变化,这会带来舒适性的影响,一般来说,当车辆匀速行驶时,乘客不会有感觉,当车辆以恒定加速度行驶时,乘客可以通过调整自身来进行适应,而当车辆的加速度在变化时,乘客就会失去调节的平衡,从而感受到不舒服,因此选择车辆加速度的变化值j作为衡量乘客舒适性的参数。
故步骤5)中所述的满足约束条件的代价函数如下:
cost=f(xf,j)
式中,xf为车辆最小化换道的纵向距离,j为车辆加速度的变化值。
所述代价函数中xf满足以下公式作为约束条件:

式中,
yf为换道纵向距离,u为车辆速度,arlmax为换道车辆侧翻的最大侧向加速度。
步骤5)中所述的内点法是一种求解线性规划或非线性凸优化问题的算法。
本发明中所述的GRU网络模型、轨迹预测模型、换道场景模型、换道车辆的动态换道轨迹规划模型均是在计算机中建立。
附图说明
图1为用于预测周围车辆的行驶轨迹的GRU网络结构图;
图2为GRU网络模型的结构图;
图3为换道场景示意图;
图4为换道车辆的动态换道轨迹规划图;
图5为换道模型示意图;
图6为本发明的流程图;
图7为换道车辆在第1时间步长内的实时换道规划轨迹图;
图8为换道车辆在第2时间步长内的实时换道规划轨迹图;
图9为换道车辆在第3时间步长内的实时换道规划轨迹图;
图10为换道车辆在第4时间步长内的实时换道规划轨迹图;
图11为换道车辆在第5时间步长内的实时换道规划轨迹图;
图12为换道车辆各时间步长的实时换道规划轨迹组合图;
图13为实时响应周围交通流变化的换道车辆的动态换道轨迹图。
具体实施方式
如图1至图13所示,一种基于5G网络的车辆动态换道轨迹的规划方法,包括以下步骤:
1)通过优秀驾驶员在实际道路环境中进行换道试验,利用5G网络通过全球定位系统和车对车通信系统(V2V)采集换道车辆周围的车辆的行驶轨迹数据,对换道车辆和周围车辆的轨迹坐标进行坐标统一化,得到连续的周围车辆的行驶轨迹点作为原始数据集;
步骤1)中所述的行驶轨迹数据为t时刻车辆的状态信息,包括位置信息和速度信息,即(xt,yt,vt)。
例如,选择男性、女性优秀驾驶员共6名在实际道路环境中进行换道试验,分别采用20km/h,40km/h,60km/h的车速在如图3所示的换道场景下进行换道操作,通过差分全球定位系统(Differential Global Positioning System,简称DGPS或差分GPS)采集换道车辆周围的车辆的行驶轨迹数据,选择全局坐标原点,对周围车辆的轨迹坐标进行坐标统一化,采集6名优秀驾驶员驾驶的周围车辆t时刻前n个时间段的行驶轨迹点作为原始数据,采集到的原始数据通常是有很多的噪点的,很多时候都会不稳定,有明显波动,需要对采集的原始数据进行降噪处理,去除异常数据后汇总,形成原始数据集。
2)在步骤1)得到的原始数据集的数据中,将t时刻前n个时间段(t-n+1,t-n+2,…,t)的数据作为GRU网络模型的输入,t+1时刻的数据作为GRU网络模型的输出,构建出多个GRU网络模型,组成用于预测周围车辆的行驶轨迹的GRU网络结构图;
步骤2)中所述的GRU网络模型由以下公式表示:
zt=sigmoid(Wz·[ht-1,xt])
rt=sigmoid(Wr·[ht-1,xt])


式中,rt表示GRU网络模型的重置门,zt表示GRU网络模型的更新门,xt表示当前节点的输入, 表示当前节点输出的候选隐藏状态,ht表示当前节点输出的隐藏状态。
表示当前节点输出的候选隐藏状态,ht表示当前节点输出的隐藏状态。
如图1所示,用于预测周围车辆的行驶轨迹的GRU网络结构图由多个GRU网络模型组成,根据某时刻前n个时间段的行驶轨迹预测下一时刻的行驶轨迹,相比于其他RNN网络模型(比如LSTM),GRU网络模型最具优势的一点是使用了同一个更新门控zt就可以进行选择遗忘和记忆,从而遗忘和选择的信息是可以联动的,也就是说对于传递进来的维度信息,我们会进行选择性遗忘,遗忘的权重可以使用包含当前输入的对应权重进行弥补,从而可以保持在一种恒定状态。
3)将步骤1)得到的原始数据集分为训练集和测试集,例如,80%作为训练集,20%作为测试集。
3-1)通过训练集的数据训练步骤2)得到的GRU网络结构图中的各GRU网络模型,确定各GRU网络模型的权重参数和偏置向量,得到基于GRU网络模型的轨迹预测模型;
步骤3-1)中确定各GRU网络模型的权重参数和偏置向量的步骤如下:
首先初始化GRU网络的权重参数和偏置向量,使用初始学习率将步骤3)得到的训练集的数据送入GRU网络模型进行训练处理,取t时刻前n个时间段的数据作为样本数据,取t+1时刻的数据作为标签数据,采用梯度下降法(Gradient Descent Optimization)最小化GRU网络模型的损失函数,多次迭代后,完成GRU网络模型的训练,得到GRU网络模型的权重参数和偏置向量。
3-2)利用测试集的数据对步骤3-1)得到的基于GRU网络模型的轨迹预测模型进行预测结果的可靠性验证测试;
4)将步骤3-1)中通过预测结果的可靠性验证测试的基于GRU网络模型的轨迹预测模型作为换道车辆的换道决策和轨迹规划的约束条件,并建立换道场景模型;
如图3所示,本实施例为三车道,前后六车的换道场景,各车辆行驶速度都不超过本车道最大限速,左侧车道为快车道;假设在换道过程中,当前车道后方车辆完全注意到换道车辆的换道操作,配合换道车辆调整自己速度;
其中,换道车辆也称为自车,用E表示;周围车辆(左前、正前、右前、左后、正后、右后)分别用FL,FM,FR,RL,RM,RR表示;
5)利用步骤4)建立的换道场景模型中满足约束条件的代价函数构建换道车辆的动态换道轨迹规划模型,计算出换道车辆的换道规划轨迹;
步骤5)中所述的满足约束条件的代价函数如下:
cost=f(xf,j)
式中,xf为车辆最小化换道的纵向距离,j为车辆加速度的变化值。
所述代价函数中xf满足以下公式作为约束条件:

式中,
yf为换道纵向距离,u为车辆速度,arlmax为换道车辆侧翻的最大侧向加速度。
步骤5)中所述的计算出换道车辆的换道轨迹的方法采用的是内点法。
6)将换道车辆的换道规划轨迹的用时分成若干时间步长,本实施例中,将换道车辆的换道规划轨迹的用时分成五个时间步长,每一个时间步长中换道车辆根据实时交通流情况采集周围车辆的行驶轨迹数据,重复步骤2)到步骤5)进行滚动计算,得到每一个时间步长内的实时换道规划轨迹,并将各时间步长的实时换道规划轨迹进行组合,得到实时响应周围交通流变化的换道车辆的动态换道轨迹,如图7至图13所示。
以上所述仅为本发明的优选实施例,并不用于限制本发明,本领域的技术人员在不脱离本发明的精神的前提提下,对本发明进行的改动均落入本发明的保护范围。
Claims (7)
1.一种基于5G网络的车辆动态换道轨迹的规划方法,其特征在于:包括以下步骤:
1)通过优秀驾驶员在实际道路环境中进行换道试验,利用5G网络通过全球定位系统和车对车通信系统(V2V)采集换道车辆周围的车辆的行驶轨迹数据,对换道车辆和周围车辆的轨迹坐标进行坐标统一化,得到连续的周围车辆的行驶轨迹点作为原始数据集;
2)在步骤1)得到的原始数据集的数据中,将t时刻前n个时间段(t-n+1,t-n+2,…,t)的数据作为GRU网络模型的输入,t+1时刻的数据作为GRU网络模型的输出,构建出多个GRU网络模型,组成用于预测周围车辆的行驶轨迹的GRU网络结构图;
3)将步骤1)得到的原始数据集分为训练集和测试集;
3-1)通过训练集的数据训练步骤2)得到的GRU网络结构图中的各GRU网络模型,确定各GRU网络模型的权重参数和偏置向量,得到基于GRU网络模型的轨迹预测模型;
3-2)利用测试集的数据对步骤3-1)得到的基于GRU网络模型的轨迹预测模型进行预测结果的可靠性验证测试;
4)将步骤3-1)中通过预测结果的可靠性验证测试的基于GRU网络模型的轨迹预测模型作为换道车辆的换道决策和轨迹规划的约束条件,并建立换道场景模型;
5)利用步骤4)建立的换道场景模型中满足约束条件的代价函数构建换道车辆的动态换道轨迹规划模型,计算出换道车辆的换道规划轨迹;
6)将换道车辆的换道规划轨迹的用时分成若干时间步长,每一个时间步长中换道车辆根据实时交通流情况采集周围车辆的行驶轨迹数据,重复步骤2)到步骤5)进行滚动计算,得到每一个时间步长内的实时换道规划轨迹,并将各时间步长的实时换道规划轨迹进行组合,得到实时响应周围交通流变化的换道车辆的动态换道轨迹。
2.根据权利要求1所述的基于5G网络的车辆动态换道轨迹的规划方法,其特征在于:步骤1)中所述的行驶轨迹数据为t时刻车辆的状态信息,包括位置信息和速度信息,即(xt,yt,vt)。
3.根据权利要求1所述的基于5G网络的车辆动态换道轨迹的规划方法,其特征在于:步骤2)中所述的GRU网络模型由以下公式表示:
zt=sigmoid(Wz·[ht-1,xt])
rt=sigmoid(Wr·[ht-1,xt])


式中,rt表示GRU网络模型的重置门,zt表示GRU网络模型的更新门,xt表示当前节点的输入, 表示当前节点输出的候选隐藏状态,ht表示当前节点输出的隐藏状态。
表示当前节点输出的候选隐藏状态,ht表示当前节点输出的隐藏状态。
4.根据权利要求1所述的基于5G网络的车辆动态换道轨迹的规划方法,其特征在于:步骤3-1)中确定各GRU网络模型的权重参数和偏置向量的步骤如下:
首先初始化GRU网络的权重参数和偏置向量,使用初始学习率将步骤3)得到的训练集的数据送入GRU网络模型进行训练处理,取t时刻前n个时间段的数据作为样本数据,取t+1时刻的数据作为标签数据,采用梯度下降法(Gradient Descent Optimization)最小化GRU网络模型的损失函数,多次迭代后,完成GRU网络模型的训练,得到GRU网络模型的权重参数和偏置向量。
5.根据权利要求1所述的基于5G网络的车辆动态换道轨迹的规划方法,其特征在于:步骤5)中所述的满足约束条件的代价函数如下:
cost=f(xf,j)
式中,xf为车辆最小化换道的纵向距离,j为车辆加速度的变化值。
6.根据权利要求5所述的基于5G网络的车辆动态换道轨迹的规划方法,其特征在于:所述代价函数中xf满足以下公式作为约束条件:

式中,
yf为换道纵向距离,u为车辆速度,arlmax为换道车辆侧翻的最大侧向加速度。
7.根据权利要求1所述的基于5G网络的车辆动态换道轨迹的规划方法,其特征在于:步骤5)中所述的计算出换道车辆的换道轨迹的方法采用的是内点法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010011237.5A CN111145552B (zh) | 2020-01-06 | 2020-01-06 | 基于5g网络的车辆动态换道轨迹的规划方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010011237.5A CN111145552B (zh) | 2020-01-06 | 2020-01-06 | 基于5g网络的车辆动态换道轨迹的规划方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN111145552A CN111145552A (zh) | 2020-05-12 |
| CN111145552B true CN111145552B (zh) | 2022-04-29 |
Family
ID=70523723
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202010011237.5A Active CN111145552B (zh) | 2020-01-06 | 2020-01-06 | 基于5g网络的车辆动态换道轨迹的规划方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN111145552B (zh) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111591294B (zh) * | 2020-05-29 | 2021-06-25 | 长安大学 | 一种不同交通环境下的车辆换道预警方法 |
| CN111750887B (zh) * | 2020-06-11 | 2023-11-21 | 上海交通大学 | 降低事故严重程度的无人驾驶车辆轨迹规划方法及系统 |
| CN111899509B (zh) * | 2020-07-20 | 2021-11-16 | 北方工业大学 | 一种基于车路信息耦合的智能网联汽车状态向量计算方法 |
| CN112115550B (zh) * | 2020-09-13 | 2022-04-19 | 西北工业大学 | 基于Mogrifier-BiGRU的飞行器机动轨迹预测方法 |
| CN112578419B (zh) * | 2020-11-24 | 2023-12-12 | 南京邮电大学 | 一种基于gru网络和卡尔曼滤波的gps数据重构方法 |
| CN112389436B (zh) * | 2020-11-25 | 2022-11-15 | 中汽院智能网联科技有限公司 | 基于改进lstm神经网络的安全性自动驾驶换道轨迹规划方法 |
| CN112766310B (zh) * | 2020-12-30 | 2022-09-23 | 嬴彻星创智能科技(上海)有限公司 | 一种节油换道决策方法和系统 |
| CN113689470B (zh) * | 2021-09-02 | 2023-08-11 | 重庆大学 | 一种多场景融合下的行人运动轨迹预测方法 |
| CN116150866A (zh) * | 2021-11-23 | 2023-05-23 | 广州汽车集团股份有限公司 | 车轮力模型训练方法、车轮力测量方法及设备 |
| CN115687764B (zh) * | 2022-11-01 | 2023-12-01 | 北京百度网讯科技有限公司 | 车辆轨迹评估模型的训练方法、车辆轨迹评估方法和装置 |
| CN116738199A (zh) * | 2023-07-03 | 2023-09-12 | 摩尔线程智能科技(北京)有限责任公司 | 特征的筛选方法、装置、电子设备及存储介质 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109501799A (zh) * | 2018-10-29 | 2019-03-22 | 江苏大学 | 一种车联网条件下的动态路径规划方法 |
| CN109739218A (zh) * | 2018-12-24 | 2019-05-10 | 江苏大学 | 一种基于gru网络的仿优秀驾驶员换道模型建立方法 |
| CN110597245A (zh) * | 2019-08-12 | 2019-12-20 | 北京交通大学 | 基于二次型规划和神经网络的自动驾驶换道轨迹规划方法 |
-
2020
- 2020-01-06 CN CN202010011237.5A patent/CN111145552B/zh active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109501799A (zh) * | 2018-10-29 | 2019-03-22 | 江苏大学 | 一种车联网条件下的动态路径规划方法 |
| CN109739218A (zh) * | 2018-12-24 | 2019-05-10 | 江苏大学 | 一种基于gru网络的仿优秀驾驶员换道模型建立方法 |
| CN110597245A (zh) * | 2019-08-12 | 2019-12-20 | 北京交通大学 | 基于二次型规划和神经网络的自动驾驶换道轨迹规划方法 |
Non-Patent Citations (4)
| Title |
|---|
| Capturing Drivers" Lane Changing Behaviors on Operational Level by Data Driven Methods;Ling Huang等;《SPECIAL SECTION ON ADVANCED BIG DATA ANALYSIS FOR VEHICULAR SOCIAL NETWORKS》;20181004;全文 * |
| 基于GRU递归神经网络的城市道路超车预测;王浩等;《中国科技论文》;20190315(第03期);全文 * |
| 基于禁忌搜索算法的换道轨迹优化;王志洪等;《科学技术与工程》;20130928(第27期);全文 * |
| 智能汽车决策中的驾驶行为语义解析关键技术;李国法等;《汽车安全与节能学报》;20191215(第04期);全文 * |
Also Published As
| Publication number | Publication date |
|---|---|
| CN111145552A (zh) | 2020-05-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111145552B (zh) | 基于5g网络的车辆动态换道轨迹的规划方法 | |
| CN115056798B (zh) | 一种基于贝叶斯博弈的自动驾驶车辆换道行为车路协同决策算法 | |
| CN110244701B (zh) | 用于基于自动生成的课程序列的自主车辆的强化学习的方法和装置 | |
| US10235881B2 (en) | Autonomous operation capability configuration for a vehicle | |
| US10838423B2 (en) | Intelligent vehicle navigation systems, methods, and control logic for deriving road segment speed limits | |
| Altché et al. | An LSTM network for highway trajectory prediction | |
| EP2610836B1 (en) | Device and method for the on-line prediction of the driving cycle in an automotive vehicle | |
| US8948995B2 (en) | Preceding vehicle state prediction | |
| CN110834644A (zh) | 一种车辆控制方法、装置、待控制车辆及存储介质 | |
| Yen et al. | Proactive car-following using deep-reinforcement learning | |
| CN109727490B (zh) | 一种基于行车预测场的周边车辆行为自适应矫正预测方法 | |
| DE102019113389A1 (de) | Systeme und verfahren für ein vorhersage-entitätenverhalten | |
| US20230047354A1 (en) | Systems and methods for personalizing adaptive cruise control in a vehicle | |
| CN117585017B (zh) | 一种自动驾驶车辆换道决策方法、装置、设备及存储介质 | |
| CN114889610B (zh) | 一种基于循环神经网络的目标车辆换道时刻预测方法及系统 | |
| JP5378002B2 (ja) | 車両動作推定装置、車両動作推定方法および車両動作推定プログラム | |
| CN113516846A (zh) | 车辆换道行为预测模型构建、预测预警方法及系统 | |
| EP4270352B1 (en) | Controlling a future traffic state on a road segment | |
| CN117601904B (zh) | 车辆行驶轨迹的规划方法、装置、车辆及存储介质 | |
| CN113635900B (zh) | 一种预测巡航过程中基于能量管理的换道决策控制方法 | |
| CN114889608A (zh) | 一种基于注意力机制的车辆换道预测方法 | |
| CN113033902B (zh) | 一种基于改进深度学习的自动驾驶换道轨迹规划方法 | |
| Lu et al. | Moving horizon estimation with variable structure interacting multiple model for surrounding vehicle states in complex environments | |
| CN114169463A (zh) | 一种自主预测车道信息模型训练方法及装置 | |
| Eiermann et al. | Driver Assistance for Safe and Comfortable On-Ramp Merging Using Environment Models Extended through V2X Communication and Role-Based Behavior Predictions |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |