CN111050930B - 超声界面元件和方法 - Google Patents
超声界面元件和方法 Download PDFInfo
- Publication number
- CN111050930B CN111050930B CN201880057035.5A CN201880057035A CN111050930B CN 111050930 B CN111050930 B CN 111050930B CN 201880057035 A CN201880057035 A CN 201880057035A CN 111050930 B CN111050930 B CN 111050930B
- Authority
- CN
- China
- Prior art keywords
- active layer
- responsive material
- material elements
- tissue surface
- interface element
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
- A61B8/4483—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device characterised by features of the ultrasound transducer
-
- G—PHYSICS
- G10—MUSICAL INSTRUMENTS; ACOUSTICS
- G10K—SOUND-PRODUCING DEVICES; METHODS OR DEVICES FOR PROTECTING AGAINST, OR FOR DAMPING, NOISE OR OTHER ACOUSTIC WAVES IN GENERAL; ACOUSTICS NOT OTHERWISE PROVIDED FOR
- G10K11/00—Methods or devices for transmitting, conducting or directing sound in general; Methods or devices for protecting against, or for damping, noise or other acoustic waves in general
- G10K11/18—Methods or devices for transmitting, conducting or directing sound
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/42—Details of probe positioning or probe attachment to the patient
- A61B8/4272—Details of probe positioning or probe attachment to the patient involving the acoustic interface between the transducer and the tissue
- A61B8/4281—Details of probe positioning or probe attachment to the patient involving the acoustic interface between the transducer and the tissue characterised by sound-transmitting media or devices for coupling the transducer to the tissue
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B06—GENERATING OR TRANSMITTING MECHANICAL VIBRATIONS IN GENERAL
- B06B—METHODS OR APPARATUS FOR GENERATING OR TRANSMITTING MECHANICAL VIBRATIONS OF INFRASONIC, SONIC, OR ULTRASONIC FREQUENCY, e.g. FOR PERFORMING MECHANICAL WORK IN GENERAL
- B06B1/00—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency
- B06B1/02—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency making use of electrical energy
-
- G—PHYSICS
- G10—MUSICAL INSTRUMENTS; ACOUSTICS
- G10K—SOUND-PRODUCING DEVICES; METHODS OR DEVICES FOR PROTECTING AGAINST, OR FOR DAMPING, NOISE OR OTHER ACOUSTIC WAVES IN GENERAL; ACOUSTICS NOT OTHERWISE PROVIDED FOR
- G10K11/00—Methods or devices for transmitting, conducting or directing sound in general; Methods or devices for protecting against, or for damping, noise or other acoustic waves in general
- G10K11/18—Methods or devices for transmitting, conducting or directing sound
- G10K11/26—Sound-focusing or directing, e.g. scanning
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Health & Medical Sciences (AREA)
- Heart & Thoracic Surgery (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- Biophysics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Biomedical Technology (AREA)
- Acoustics & Sound (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Multimedia (AREA)
- Gynecology & Obstetrics (AREA)
- Mechanical Engineering (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
- Surgical Instruments (AREA)
- Prostheses (AREA)
Abstract
超声界面元件(10)用于建立与入射组织表面(32)的界面,以用于超声的传输的目的。提供了一种超声透射主动层(14),其包括可响应于电磁刺激而变形的一个或多个响应性材料元件(16)。控制所述一个或多个元件以如下方式变形:与组织表面(32)渐近地建立向外扩展的界面,所述界面从接触的起始点或接触线开始并向外扩展到更广的区域。
Description
技术领域
本发明涉及一种用于便于超声换能器与接收表面之间的界面的元件。
背景技术
在将超声施加到人或动物组织时,重要的考虑因素是使得能够将超声振动有效地转移到组织。在这方面,确保超声换能器与组织之间的牢固接触是重要的因素,以避免由于气隙或不均匀接触而导致效率损失。
在当前实践中,借助于分布在组织的入射区域上的超声透射凝胶来方便换能器与组织之间的界面。凝胶确保换能器与组织之间不存在气隙。
然而,凝胶的使用对于患者而言是不方便且不舒适的,并且对于超声操作者而言效率低下,这增加了流程的额外时间和负担以及增加的成本。
因此,需要用于提供超声界面的更方便和有效的手段。
发明内容
本发明由权利要求所定义。
根据本发明的一个方面,提供了一种超声界面元件,包括:
超声透射主动层,其包括适于响应电磁刺激而变形的一个或多个响应性材料元件,并且所述主动层具有适于施加到入射组织表面的上接触表面;以及
控制器;
其中,所述主动层能够被配置为在第一状态中,在所述第一状态中,所述层的所述上接触表面的初始线或区域部分相对于周围区域部分升高,并且其中,
所述控制器适于控制所述一个或多个响应性材料元件以将所述主动层变形到平面外,从而使所述初始线或区域部分平滑地向外扩展以形成最终的较大区域部分,从而在所述主动层与所述入射组织表面之间建立渐近地扩展的界面,
所述控制包括:控制由所述主动层所包括的响应性材料元件的阵列以从所述初始线或区域部分向外并且跨过所述较大区域部分而以顺序的图案变形,或者由控制所述主动层所包括的单个响应性材料元件延伸跨过至少整个较大区域部分,以从初始凸形形状转变到第二个凸度较小的形状。
本发明基于利用响应性材料来建立与入射组织表面的安全界面。特别地,本发明提供了一种界面元件,所述界面元件具有包括一个或多个响应性材料元件的超声透射主动层。所述(一个或多个)响应性材料元件被控制为以协调的方式变形,以便与组织表面建立适形界面。适形界面是指符合组织表面,即针对组织表面变形。然后,所述元件可以提供可变形的声学“窗口”,使得能够将超声振动直接传递到皮肤,而不会出现气隙。
在使用中,超声界面元件可以被提供为耦合到超声换能器,以提供与组织表面的声学界面。
如本领域技术人员将意识到的,响应性材料是具有响应于一个或多个电磁刺激而可逆地变形或以其他方式改变结构特性的一类材料。响应性材料的种类包括,例如,热响应性形状记忆材料,例如形状记忆合金和形状记忆聚合物,磁致伸缩材料,磁性形状记忆合金,压电材料和光响应性材料(光机械材料)。在响应性材料领域中,另一类新出现的材料是电活性材料(EAM),尤其是电活性聚合物(EAP)。EAM可以作为传感器或致动器使用,并且可以容易地制造成各种形状,允许容易地集成到各种系统中。EAM将在下面更详细地讨论。
在超声换能器中使用响应性材料并不新鲜。然而,尚未考虑使用这种材料来实现更有效的声学界面。该解决方案提供了一种将换能器与组织界面的快速、有效和可靠的方式,而无需诸如凝胶的辅助材料(但是实施例并不与额外地使用凝胶不相容)。
本发明提供了一种控制器,所述控制器适于控制界面元件的超声透射主动层内的一个或多个响应性材料元件,以将所述层渐近地跨期望的接触区域施加到组织表面上。
为了避免疑问,在本申请的上下文中,超声“透射”是指至少部分透射(适于透射入射的超声的至少一部分)。
在使用中,用户可以将界面元件的主动层初步临时施加到组织表面,所述初始接触通常是不完美的,包括气隙或不均匀接触的区域。控制所述(一个或多个)元件从而以如下和方式变形:缓慢且系统地将主动层压在组织表面上并跨越组织表面,并从最初的小区域或接触线开始,渐近地向外扩展到最终的更广的区域。作为在组织上连续、渐近的压力的施加的结果,避免了被困的气穴或在表面连通中的其他不一致性,并且在整个界面区域的主动层与组织表面之间建立了光滑的适形界面。
本发明所定义的形状变化的效果是,控制了主动元件的变形,使得主动层与入射组织表面之间的界面区域从初始的子区域或接触线向外扩展到更大的接触区域,使得在所述控制的结束,在主动层与组织表面之间实现了跨连续区域的适形界面。
还可以提供主动层耦合到其上的一个或多个超声透射顺应性背衬层。这些优选地被布置为跟随主动层的变形。例如,可以提供顺应性凝胶垫层,其上表面与主动层连通并且被布置为跟随主动层的变形。这使得能够进行通过两层并进入组织表面的有效声传递,在使用中,提供了超声换能器,所述超声换能器被声学地耦合到顺应性凝胶层的输入表面。
控制响应性材料元件以使其在平面外变形,以建立渐近地扩展的界面。平面外是指在远离主动层的表面的方向上。该术语的使用不旨在将主动层限制为平面层;本发明例如与弯曲或轮廓层兼容。
为了建立扩展界面,所述主动层可以被配置为在第一状态下,在所述第一状态中,所述层的初始线或区域部分相对于周围区域部分升高,并且其中,所述控制器适于控制一个或多个响应性材料元件平面外变形,以使所述第一区域部分平滑地向外扩张,以形成最终的较大区域部分。
可以以不同的方式实现在主动层与组织表面之间建立均匀界面所需的必要的渐进向外的压力施加。
根据第一选择,其可以涉及控制由主动层构成的响应性材料元件的阵列,以从所述初始线或区域部分向外并跨过所述较大区域部分而以顺续的图案变形。
根据第二选择,其可以包括控制包括至少在整个较大区域部分上延伸的单个响应性材料元件,以从初始凸形形状转变到第二凸度较小的形状。在这种情况下,控制可以包括转变施加到单个响应性材料元件的电磁刺激的水平,从而将元件从所述初始凸形形状转变为第二凸度较小的形状。
单个响应性材料元件可以覆盖整个较大区域部分,即,覆盖较大区域部分的整个表面区域。单个响应性材料元件可以在主动层的主要部分上延伸,意味着主动层的大部分表面积。例如,它可以覆盖主动层的大部分表面积。它可以横跨例如覆盖整个主动层,即主动层的整个表面积。根据第二种选择,主动层可以仅包括所述单个响应性材料元件,而不包括其他响应性材料元件。
更具体地,在根据第一选择的示例中,主动层可以包括响应性材料元件,其在整个主动层上延伸,并且其中,控制器适于控制元件从初始凸形形状渐近地变为凸度较小的形状,从而当应用于所述组织表面时,建立适形界面,从所述凸形的顶点渐近地向外扩展到所述凸度较小的形状的更宽区域。在这种情况下,主动层可以仅包括这一个响应性材料元件,而没有其他元件。响应性材料元件可以覆盖整个主动层,即覆盖主动层的整个表面区域。所述控制可以包括转变施加到响应性材料元件的电磁刺激的水平,从而将元件从所述初始凸形形状转变为第二凸度较小的形状。
同样,根据该选择,通过渐近地地将包括例如期望接触的全部或基本上全部区域的响应性材料元件从凸形变为平坦形状,来实现界面的渐近地扩大的区域。这种形状变化的效果是,从初始的中间(顶点)区域开始,将响应性材料元件(和主动层)缓慢地扩展到组织表面上,并且然后渐近地向外扩展,以覆盖元件(活动层)的全部(或几乎全部)区域。主动层例如可以包括响应性材料的单个有结合力的层,或者可以包括响应性材料子层的多层堆叠。
更具体地,在根据第二选择的示例中,主动层可以包括响应性材料元件的阵列,并且其中,所述控制器适于控制阵列的元件从阵列中的单个元件或元件线以与所述初始线或区域部分相对应的顺序模式向外变形,以在主动层与所述层所施加的入射组织表面之间渐近地建立适形的界面,如所述响应性材料元件被控制地,界面的区域从所述元件或线向外扩展。
因此,根据该选择,通过对响应性材料元件的阵列的协调控制来实现界面的渐近地扩大的区域,所述响应性材料元件的阵列被控制以从初始开始元件或元件线向外顺序地成组地致动,例如成行,成线或以环状组地致动。元件的激活可以在所有方向上或仅在一个或多个方向上向外扩展。在任一种情况下,元件的致动可以持续直到全部或基本上全部己经历平面外变形,从而将主动层的应用跨整个或基本整个区域上的组织表面上。同样,由于渐近地施加向外的压力,避免了在两个表面之间的界面中困住的气泡或其他缺陷。
“阵列”是指在整个主动层上分布的规则的或不规则的响应性材料元件,它们在平行于由该层限定的平面或表面轮廓的方向上彼此分开。
如所指出的,控制器可以适于控制所述元件以从所述单个元件或线沿所有方向向外以顺序的图样向外变形。或者控制器可以适于控制所述元件以从所述单个元件或线沿一具或多个方向的子集向外以顺序的图样向外变形。这可能取决于初始的单个元件或元件线在元件的阵列中的位置。如果位于中心,则在所有方向上的向外顺序变形可能是最合适的。在偏离中心的位置处,仅在单个方向上变形可能会更合适(例如,朝中心方向变形)。如将在下面讨论的,可以基于在主动层与组织表面之间检测到的初始压力分布来选择初始元件或元件的线的位置。
根据本发明的任何实施例,超声界面元件可以包括用于引起主动层的振动的振动器件。通过在与组织表面建立界面的同时使主动层振动,可以驱使空气离开接触界面,从而避免了气泡的捕获,气泡会导致非理想的表面接触。另外,振动可以导致摩擦力的减小,从而使得主动层能够平滑地铺展到组织表面上而不会例如引起皮肤折叠,皮肤折叠可能是导致表面界面不良缺陷的另一原因。
任选地,振动器件可以由所述响应性材料元件中的一个或多个提供,控制器适于控制这些元件以表现出振荡变形。
替代地,可以提供专用的一个或多个振动器元件以促进该效果,或者可以专门地提供额外的专用的一组响应性材料元件,以便在主动层中引起振动效果。
根据本发明的任何实施例,界面元件可以包括接触压力感测器件,所述接触压力感测器件用于感测主动层与组织表面之间的接触压力分布。
此外,根据一些实施例,所述控制器然后可以适于:基于感测到的所述分布,识别主动层与组织表面之间的最低接触压力的线或子区域;识别与识别出的所述子区域或线在空间上对齐的单个响应性材料元件或元件线;并选择识别出的所述单个元件或元件线作为所述顺序图案中的单个元件或元件线。
本发明的实施例的目的是避免在主动层和与织表面之间的接触中出现间隙或断裂,例如由组织表面中的气穴或小的凸凹所引起的间隙或断裂,组织表面中的气穴或小的凸凹通常被主动层“桥接”而不是通过在足够的压力下将主动层施加到这些区域而被填充。通过识别最低的初始表面接触压力的点(例如,在用户将所述层初始地,轻微地施加到组织表面上之后),本发明的上述实施例有效地识别了距组织表面最大垂直距离的这些区域。通过选择该点或线作为开始将主动层渐近地扩展到组织表面上的点或线,避免了在这些区域内无意地捕获气穴。
根据一个或多个示例,接触压力感测器件可以由所述响应性材料元件中的一个或多个提供,控制器适于在初始将主动层手动施加到到组织表面后基于由所述一个或多个元件产生的压力感应电输出来感测接触压力。特别地,在响应性材料元件包括例如电活性聚合物材料(或压电材料)的情况下,元件的外部引起变形(通过接触压力)被转换成具有取决于施加压力的大小电压的幅值的电压(或电流)的电输出。以此方式,可以测量接触压力。
根据一个或多个示例,通过施加叠加的低振幅AC信号和高振幅DC信号,可以在元件的电磁感应变形的同时感测接触压力。这将在以下各部分中详细解释。
作为直接测量接触压力的替代方式,用于识别远离主动层凹进的组织表面区域的另一种手段是使用接触感测器件来识别主动层与组织表面之间的接触区域。接触感测器件可以例如包括分布在主动层的上表面上并且电耦合到控制器的可单独寻址电极的阵列。
所述控制器可以适于:检测任何两个电极之间的电流,并且使用所述电流作为所述电极与组织表面之间接触的指示。电流提供了这样的指示:带有相关的两个电极的主动层的区域已经与组织表面接触。
额外地或者替代地,控制器可以适于监视一对或多对电极之间的电容,并且使用所述电容的变化作为所述电极与组织表面之间的接触的指示。
在任一种情况下,控制器可以适于选择没有检测到这样接触的线上的点(或线上的点中的一个)作为开始进行元件的顺序激活的点或线。
根据一个或多个示例,电极的阵列可用于刺激响应性材料元件的变形以及用于感测主动层与组织表面之间的接触。
根据本发明的任何实施例,控制器可以适合于根据一种控制模式,来控制响应性材料元件在基本平行于材料表面的方向上变形,从而促进设置在主动层和组织表面之间界面流体或凝胶的侧向输送。所述流体或凝胶可以例如是超声透射凝胶。已经发现,响应性材料元件来回(左右)的小的横向移动将凝胶推到主动层与组织表面之间的接触界面的外边缘。当控制元件使它们同时沿相同方向变形时,已经发现,在前缘处的凝胶流出大于在后缘处的凝胶流入,从而导致凝胶的净流出。因此,当建立接触以促进凝胶排空时,在主动层与组织表面之间留下尽可能窄的凝胶层时,可以使用这种方法。
根据任何实施例,所述一个或多个响应性材料元件可以包括电活性材料(EAM)。在特定示例中,这可以是电活性聚合物材料(EAP)。在本发明的实施例中,EAP具有许多优点,可以使它们优于其他形式的响应性材料。这些优点将在下一节中讨论。
根据本发明的另一方面,提供了一种超声设备,包括:承载体;分布在所述承载体上的一个或多个超声换能器;以及如上文概述的任何实施例或示例中所描述的或如本申请的权利要求中所定义的超声界面元件,所述超声界面元件被布置在一个或多个超声换能器的输出路径中,以促进换能器与将要应用超声设备的入射组织表面之间的界面。所述超声换能器优选地被布置为与超声界面元件直接接触,以使超声波最佳地声学耦合。
根据本发明的另一方面,提供了一种在超声界面元件和所述超声界面元件适于被施加于的入射组织表面之间建立界面的方法,所述超声界面元件包括超声透射主动层,所述主动层包括一个或多个适于响应电磁刺激而变形的响应性材料元件,并且
其中,所述主动层能够被配置为在第一状态中,在所述第一状态中,所述层的所述上接触表面的初始线或区域部分相对于周围区域部分升高;
并且所述方法包括:
控制所述一个或多个元件以变形到所述主动层的平面外,以使所述初始线或区域部分平滑地向外扩展,以形成最终的较大面积的部分,从而逐步在主动层与入射的组织表面之间建立界面。
所述控制包括:控制由所述主动层所包括的响应材料元件的阵列以从所述初始线或区域部分向外并且跨过所述较大区域部分以顺序的图案变形,或者由控制所述主动层所包括的单个响应材料元件延伸至少通过整个较大区域部分,以从初始凸形转变到第二个凸度较小的形状。
本发明定义的形状改变的效果是,控制变形,使得界面的区域从初始的子区域或接触线向外扩展到更大的接触区域,使得在所述控制的结束,实现了跨连续区域主动层与组织之间的适形。
附图说明
现在将参考附图详细描述本发明的范例,其中:
图1和图2示出了EAP设备的两种可能的操作模式;
图3示出了根据本发明的一个或多个实施例的示例性超声界面元件;
图4图示了不是根据本发明的超声透射层的第一控制方法;
图5图示了根据本发明的一个或多个实施例的超声透射层的第一控制模式;
图6图示了根据本发明的一个或多个实施例的超声透射层的另一控制模式;
图7图示了根据本发明一个或多个实施例的基于接触压力感测的超声透射层的另一控制模式;
图8图示了根据本发明的一个或多个实施例的基于接触检测的超声透射层的另一控制模式;
图9图示了基于单层EAP的使用来控制超声透射层的另一模式;并且
图10示出了示例性超声诊断成像系统的框图。
具体实施方式
本发明提供了一种超声界面元件,用于出于施加超声的目的而建立与入射组织表面的界面。提供了一种超声透明主动层,其包括一个或多个响应于电磁刺激而可变形的响应性材料元件。所述一个或多个元件被控制为以如下方式变形:从接触的起始点或接触线开始,并渐近地向外扩展,直到覆盖更宽的区域,从而渐近地在主动层与组织表面之间建立界面。
特别地,一个或多个元件的变形为使得引起主动层的初始隆起区域平滑地向外扩展,使得当将所述区域施加在组织表面上时,所述扩展导致平滑的建立主动层与组织表面之间的适形界面随着层的变形而在尺寸上扩展。
本发明基于响应性材料的使用以促进界面的有效建立。
在本发明的优选实施例中,响应性材料元件包括电活性材料(EAM)。如以上简要所述,EAM是电响应材料领域中的一类材料。当在致动装置中实施时,使EAM经受电驱动信号可使它们的尺寸和/或形状发生变化。该效应可以用于致动和感测目的。存在无机和有机EAM。一种特定类型的有机EAM是电活性聚合物(EAP)。
电活性聚合物(EAP)是电响应性材料领域中新兴的一类材料。EAP可以作为传感器或致动器使用,并且可以容易地制造成各种形状,允许容易地集成到各种系统中。
已经研究出具有诸如致动应力和应变等特性的材料,其在过去的十年中已经显著改善。技术风险已经降低到产品开发的可接受水平,使得在商业和技术上变得对EAP越来越感兴趣。EAP的优势包括低功耗、小的形状因子、灵活性、无噪声操作、准确性、高分辨率的可能性、快速响应时间和循环致动。
EAP材料的改进性能和特殊优势使其适用于新的应用。
基于电致动,EAP设备可用于需要少量移动部件或特征的任何应用中。类似地,所述技术可以用于感测小的移动。
EAP的使用实现了之前不可能实现的功能,或者提供了相对于常规传感器/致动器解决方案的大的优势,这是由于与普通致动器相比在小体积或薄形状因子中相对大的变形和力的组合。EAP还提供无噪声操作,精确的电子控制,快速响应以及大范围的可能驱动频率,例如0-1MHz,最典型地低于20kHz。
使用电活性聚合物的器件可以细分为场驱动的和离子驱动的材料。
场驱动EAP的范例包括压电聚合物、电致伸缩聚合物(例如基于PVDF的弛豫聚合物)和介电弹性体。其他范例包括电致伸缩接枝聚合物、电致伸缩纸、电子驻极体、电粘弹性弹性体和液晶弹性体。
离子驱动的EAP的范例包括共轭/导电聚合物,离子聚合物金属复合物(IPMC)和碳纳米管(CNT)。其他范例包括离子聚合物凝胶。
场驱动的EAP通过直接机电耦合的电场来致动。它们通常需要高的场(伏特/米)但是低的电流。聚合物层通常很薄,以保持驱动电压尽可能低。离子EAP通过电诱导的离子和/或溶剂的传输而致动。它们通常需要低的电压但是高的电流。它们需要液体/凝胶电解质介质(但是一些材料系统也可以使用固体电解质)。
EAP的两个类别都有多个族成员,每个族都有自己的优点和缺点。
场驱动EAP的第一个值得注意的子类是压电和电致伸缩聚合物。虽然传统压电聚合物的机电性能有限,但是在改善这种性能方面的突破导向了PVDF弛豫聚合物,其示出自发的电极化(场驱动的对齐)。可以对这些材料进行预应变以在应变方向上改善性能(预应变导致更好的分子对齐)。通常,使用金属电极,因为应变通常处于中等范围(1-5%)。也可以使用其他类型的电极(例如导电聚合物,炭黑基油,凝胶或弹性体等)。电极可以是连续的或分段的。
场驱动的EAP的另一个感兴趣的子类是介电弹性体。这种材料的薄膜可以夹在柔性电极之间,形成平行板电容器。在介电弹性体的情况下,由施加的电场引起的麦克斯韦应力导致膜上的应力,使其在厚度上收缩并在面积上扩张。通常通过预应变弹性体(需要框架来保持预应变)来放大应变性能。应变可能是可观的(10-300%)。这也限制了可以使用的电极类型:对于低应变和中等应变,可以考虑金属电极和导电聚合物电极,对于高应变范围,通常使用炭黑基油、凝胶或弹性体。电极可以是连续的或分段的。
在一些情况下,当聚合物本身缺乏足够的导电性(尺寸方向)时,添加薄膜电极。电解质可以是液体、凝胶或固体材料(即高分子量聚合物和金属盐的复合物)。最常见的共轭聚合物是聚吡咯(PPy)、聚苯胺(PANi)和聚噻吩(PTh)。
致动器也可以由悬浮在电解质中的碳纳米管(CNT)形成。电解质与纳米管形成双层,允许注入电荷。这种双层电荷注入被认为是CNT致动器的主要机制。CNT充当电极电容器,其中电荷注入CNT,然后通过电解质移动到CNT表面形成的电双层而平衡。改变碳原子上的电荷会导致CC键长的变化。结果,可以观察到单个CNT的膨胀和收缩。
图1和图2示出了EAP设备的两种可能的操作模式。
该设备包括电活性聚合物层6,所述电活性聚合物层6夹在电活性聚合物层14的相对侧上的电极2、4之间。
图1示出了未夹紧的设备。如图所示,使用电压来使电活性聚合物层在所有方向上扩张。
图2示出了被设计为使得扩张仅在一个方向上出现的设备。该设备由载体层8支撑。使用电压来使电活性聚合物层弯曲或弯转。
可以认为电极、电活性聚合物层和载体一起构成整个电活性聚合物结构。
例如,所述运动的性质源自在被致动时扩张的主动层与被动载体层之间的相互作用。为了获得如图所示的围绕轴的不对称弯曲,可以例如施加分子取向(膜拉伸),迫使在一个方向上移动。
在一个方向上的扩张可能由EAP聚合物的不对称性引起,或者可能由载体层的性质中的不对称或两者的组合引起。
如上所述的电活性聚合物结构可用于致动和感测。最突出的感测机制基于力测量和应变检测。例如,介电弹性体可以通过外力容易地拉伸。通过在传感器上施加低电压,可以将应变测量为电压的函数(电压是面积的函数)。
用场驱动系统进行感测的另一种方法是直接测量电容变化或测量作为应变的函数的电极电阻的变化。
压电和电致伸缩聚合物传感器可响应于所施加的机械应力而生成电荷(假设结晶度足够高以生成可检测的电荷)。共轭聚合物可以利用压电离子效应(机械应力导致影响离子)。当暴露于可以测量的应力时,CNT经历CNT表面上的电荷变化。还已经表明,当与气态分子(例如O2,NO2)接触时,CNT的电阻发生变化,使得CNT可用作气体检测器。
通过将低振幅AC信号(用于感测)与较高振幅DC信号(用于初级变形)叠加应用,可以实现同时的感测和致动。例如在WO 2017/036695中详细描述了用于实现此目的的机制。
在下面的详细示例中,提供了包含EAP材料的响应性材料元件。然而,这仅是示例性的,并且在所有情况下应理解的是,在所描述的实施例中,EAP材料元件可以被不同种类的响应性材料元件(由适当的刺激刺激)代替,而不会改变本发明的一般概念、功能或实现的一般优点。
图3示出了根据本发明的一个或多个实施例的一个示例性超声界面元件10的示意图。界面元件用于安装在超声换能器或换能器阵列上,以便于将超声有效地输出耦合到接收介质中。界面元件包括超声透射主动层14,所述超声透射主动层14包括一个或多个响应性材料元件。举例来说,在图3所示的特定界面元件中,所述主动层包括多层堆叠,所述多层堆叠包括第一硅树脂层20和第二PVDF-TrFE层16。在该示例中,硅树脂层和PVDF-TrFE层提供了可变形的响应性材料元件。在进一步的示例中可以包括更多数量的层。然而,在图3中示出了两个用于说明。
背衬层22堆叠在主动层下方,所述背衬层22用于在变形时促进主动层的平面外弯曲。顺应性衬垫层24堆叠在背衬层下方。顺应性衬垫层优选地包括封装的一体积的超声透射凝胶。
顺应性背衬层22可以被选择或配置为具有与主动层14的声阻抗匹配的声阻抗,从而避免在这两个层之间的界面处的内部声反射。
尽管在本示例中提供了柔顺衬垫层24,但是这对于本发明不是必需的并且可以被省略。
超声透射主动层14的一个或多个响应性材料元件16、20设置有一对或多对相应的电极对(图3中未示出),用于施加电磁刺激以刺激响应性材料元件的变形。电极被可操作地耦合到控制器28,所述控制器28适于控制对电极的刺激施加,以引起主动层14变形的期望的图案。电极优选地是超声透射的。
主动层结构的(一个或多个)材料层16、20可以(每个)包括响应性材料的单层,或者可以包括响应性材料元件的阵列。如所指出的,可以提供响应性材料元件的多层堆叠,其中这些响应性材料元件任选地可以由不同的材料形成。
尽管在本示例中提供了柔顺衬垫层24,但这不是必需的。优选地,衬垫层包括封装的一体积的可变形材料,其中该材料可以是油、液体、可变形聚合物材料,或者最优选地是凝胶。缓冲层可以在超声换能器与主动层14之间提供改善的声学界面。这是因为缓冲层的下表面可以以与上表面不同的形状变形,从而允许上表面跟随主动层的变形,而相比之下,下表面可以弯曲并适形于应用于它的超声换能器的输出表面。因此,可以实现两者之间的有效耦合。
顺应性缓冲层可以例如包括封装的一体积的凝胶。作为非限制性实例,这可以包括水凝胶、未固化的聚丁二烯橡胶或其他粘/弹性材料。
与一些现有技术的设备相比,根据本发明,主动层14的响应性材料元件被布置为使得在使用中,它们位于通过界面元件10传输的超声波的声学路径内。因此,主动层14必须是超声可透射的。为此,可以设置驱动响应性材料元件的电极,所述电极在声学上是透明的(或至少部分透明或透射的)。电极可以例如是亚微米金属层或导电聚合物。替代地,电极可以包括某些类似碳的材料,例如石墨烯、碳黑或碳纳米管。
为了本示例的目的,将假设界面元件10包括响应性材料元件16、20,其包括电活性聚合物材料。然而,这仅用于说明,并且其他响应性材料与实施例兼容。
在使用中,控制主动层14的一个或多个EAP元件16、20以使其变形,从而引起主动层14的平面外变形或膨胀。当界面元件10被布置为邻近入射组织表面或临时抵靠入射组织表面保持时,变形建立了主动层14的上表面与入射组织表面之间的界面。
这在图4中示意性地示出,其示出了布置在超声换能器34上方的界面元件10。图4的上部图像示出了界面元件10临时施加在具有不均匀组织表面的组织层32上。刺激主动层14的响应性材料元件以及随后的主动层变形导致在主动层与组织表面32之间建立接触(如图4的底部图像所示)。任选地,主动层14的(一个或多个)响应性材料层可以被夹持在侧面,从而能够生成更大的力。
然而,在实践中,仅均匀地刺激主动层14的EAP元件16可能不会导致图4所示的两个接触表面之间具有理想的一致性。特别地,由于在建立接触时空气可能会被捕获,或者凹部周围的皮肤可能折叠,因此在位于靠近主动层14的中心的组织中的所示凹部36周围的区域内难以获得良好的接触。在其他区域中,当将主动层14简单地平整地平放在组织表面32上时,皮肤折叠也会成为问题。皮肤折叠阻碍了两个表面之间的理想接触。
因此,在根据本发明的实施例中,主动层14的变形是不均匀地进行的,仅从一个小的突起区域开始并且使该区域向外平滑地扩展,直到建立更大的界面区域为止。通过控制界面区域的渐近地向外扩展,避免了由凹入区域引起的滞留的气穴,并且可以防止皮肤的折叠。
可能有两种主要方法:使用单个变形EAP元件建立扩展界面,并使用EAP元件阵列的协调的变形来建立扩展界面。首先将描述利用EAP元件的阵列的实施例。
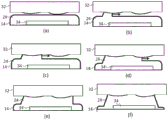
图5示出了第一示例。根据该实施例,主动层14与组织表面32之间的界面从单个接触的初始点(子区域)向外扩展。
超声界面元件10包括超声透射主动层14,所述超声透射主动层14包括EAP元件阵列,所述EAP元件阵列可响应于使用提供的电极(未示出)施加的各个电刺激而将层14变形到平面外。示出的界面元件布置在超声换能器34上方,并临时施加到组织表面32(图5(a))。EAP元件的受控变形如图5(b)-(f)所示。
通过控制位于主动层14的单个小的子区域内的EAP元件的小的子集的平面外变形,来建立界面的第一初始区域(图5(b))。这导致从层14的表面形成一个小的突起,所述突起被EAP变形的力压在组织表面32上。
然后,界面的这个较小的初始区域平滑地向外扩展,以覆盖两个表面之间渐近地变大的界面区域。如图5(c)-(f)所示,通过从初始被致动的子集顺序地向外致动阵列的EAP元件,从而实现了更大的平面外变形。这导致主动层14与组织表面之间的界面区域渐近地扩大,直到已经实现大范围的界面为止。由于界面向外平滑扩展,避免了在任何凹陷中捕获空气。
图5示出了截面图,其中为了说明,示出了沿单个方向(向右)的界面的扩展。但是,实际上可以通过在X和Y方向上受控的向外变形来实现界面在二维上的扩展。
替代于从单个点或子区域控制界面的扩展,可以实现从单个初始接触线的扩展。在此,通过阵列的EAP元件的初始线的面外变形来实现超声透射主动层14与组织表面32之间的初始接触。之后,依次致动相邻的EAP元件,使界面在整个组织表面32上线性扩展。同样,这种建立接口的模式降低了捕获气穴或皮肤折叠的风险。
在控制主动层14的EAP元件的变形以建立界面的同时,可以监测层14与组织表面32之间的接触压力。这可以通过WO 2017/036695中描述的方法来实现,其中,通过将交流和直流信号叠加施加到元件上,可以同时使用EAP元件进行致动和感测。
通过在控制变形时监视接触压力,可以任选地实时调整变形压力,以确保始终在主动层14与组织表面32之间保持紧密的界面。由此建立反馈系统。通过控制所施加刺激的强度可以改变压力,从而精细地调节变形程度。可以调节变形压力以确保在整个界面区域上均匀地施加压力。
通过使用所描述的方法来建立超声界面元件10与组织表面32之间的接口,可以减少接口凝胶的数量和所需的接触压力(以确保两个表面之间的一致性)。
根据本发明的任何实施例,可以提供用于实现超声透射主动层14的振动的器件。通过在建立界面的同时振动主动层,可以驱使否则可能被捕获的空气从接触界面驱除或散布。振动的使用可以与本公开中描述的任何界面建立方法相组合。
除了散布空气,振动还可能导致主动层14与组织表面32之间的摩擦力减小。因此,这增强了表面的平滑覆盖,而没有例如引起皮肤的折叠。
振动器件可以由阵列本身的EAP元件提供。例如,这可以通过将高频信号施加在主DC变形信号之上而引起振荡变形来实现(例如,如WO2017/036695中所述)。替代地,可以以专用振动器的形式提供分离的振动器件,所述振动器被机械地耦合到主动层。
为了最有效地建立界面,理想情况下,上述界面区域的向外扩展应从主动层14和组织表面32之间的初始接触压力最低的点开始。这样做的原因是最低初始接触压力的点对应于空气中最有可能被捕获或皮肤最有可能折叠的组织区域。例如,在图4的示例中,最低的初始接触压力的区域将是下沉36,所述点是相对于层14垂直位移最多。
因此,根据实施例的子集,控制器可以适于使用EAP元件的阵列来感测超声透射层与组织表面32之间的接触压力的初始分布,并基于此来识别最低接触压力的子区域或线。然后以例如图5所示的方式,将该线或子区域选择为从其控制界面扩展的线或子区域。
图6示意性地示出了该方法。
为了测量压力分布,控制器28可以适于控制主动层14的EAP元件16首先均匀变形,使得整个层14以初始接触力均匀地施加到组织表面32。这显示在图6的左侧。控制器然后可以测量通过组织表面施加到EAP元件的超声透射主动层上的接触压力的分布。这可以通过例如在WO 2017/036695中描述的方法与层的均匀致动同时确定。
当EAP元件被均匀激活时进行首次接触的点通常是最低接触压力的点。
一旦确定了点、子区域或线或最低接触压力,就可以缩回EAP元件,并且通过界面的初始区域的向外扩展来建立适形界面,从所述最低接触压力的识别的点、子区域或线处建立的初始接触区域或线开始。这如图6的右侧示出。在此,中央凹部36被识别为最低压力的子区域,并且控制器控制超声透射层从该子区域向外的变形。
作为测量压力分布的替代,可以通过直接接触检测来识别组织表面32的最凹入的区域(或相对于超声透射层的表面法向移位的区域)。在此,如以上示例中那样,控制EAP元件使其均匀变形,但是优先于测量压力,使用一组电极来检测层14与组织表面之间的接触点。以这种方式,非接触点可以被识别并归为可能的凹陷区域。该方法可能比压力感测方法更灵敏,并且可以在非常低的初始接触压力下检测到接触。
可以电(例如,电阻式或电容式)测量主动层14与组织表面32之间的接触点。这可以借助于布置在主动层14的顶表面上的电极阵列来促进。
电阻式接触感测的示例在图7中进行了示意性说明,所述图显示了布置在超声换能器34上方的超声界面元件10。在超声透射主动层14的顶表面上布置有可操作地耦合到控制器28(未示出)的电极阵列38。优选地,电极38是与用于刺激主动层14所包括的EAP元件的阵列相同的电极。这避免了提供覆盖主动层的电极的单独的被动层,被动层可能妨碍变形作用。
优选地,每个电极38单独地连接至控制器,以使每个电极能够被分别寻址以进行感测。优选地,电极还彼此互连,以使所有电极能够容易地一起被激活(其中要进行均匀刺激)。
为了识别凹陷区域,首先控制EAP元件使其均匀变形,以建立初始的临时接触,如图7所示(上图)。
可以通过监视在任何两个相邻电极38之间流动的电流来检测主动层14与组织表面32之间的接触点或区域。这在图7(顶部)中示出,其中,组织表面32右侧的突起37与主动层14之间的接触通过流过与之直接接触的两个电极的电流可以被检测到(以粗体显示)。
均匀的变形可以继续进行,以便检测更多的接触点。通过继续该过程,可以将压痕识别为不与主动层14接触或最后接触的那些。这些可以被选择为主动层14与组织表面32之间的界面从其向外扩展的点或子区域。
这在图7的底部示出。中间凹陷36被识别为最大凹陷的点。控制器控制界面从该区域向外扩展到外围区域。通过从最大凹陷点向外扩展界面区域,可避免该区域中任何潜在的残留空气。
替代电阻感测,根据其他示例,也可以电容性地感测接触。图8中示意性地图示了一个示例。
再次,主动层14在其顶表面上设有电极38的阵列。优选地,这些是与用于刺激该层的EAP元件的电极相同的电极,以最小化界面元件10的所需部分的数量。电极优选地可单独寻址以进行感测。
电极38可以用作(平面)电容传感器,其中,可以检测到一组电极与所选参考之间的电容差,并用于指示所述一对电极与组织表面32之间的接触。
上面描述的实施例利用电极阵列以诸如建立向外扩展的界面区域的方式使超声透射层变形。根据第二种方法,可以提供单层的EAP材料,其适于响应于适当的电刺激而变形,从而建立从初始接触点向外扩展的界面。
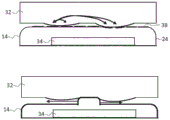
图9中示意性地图示了一个示例。根据该示例,提供了包括超声透射主动层14的界面元件10,所述主动层被布置为覆盖顺应性凝胶背衬层24。界面元件被布置在超声换能器34上方。主动层14包括单层EAP,其可通过刺激来控制以从第一凸形(图9,顶部)变形为第二(基本上)平坦的形状(图9,底部)。
如图9所示,当将其被保持抵靠入射的组织表面32时,这种变形导致在组织表面上渐近地向外施加压力,这导致建立光滑的适形界面(即主动层14和组织表面32彼此压在一起)。从凸形到平坦形的变形有效地实现了与图3-8的实施例相同的效果,因为建立了接触的初始子区域(在这种情况下,由凸形的顶点覆盖的区域),然后将该层的周围相邻区域拉到所述子区域的水平,以渐近地扩大接触面积。以这种方式,实现了层14在组织表面上的平滑扩展。
如图9所示,此EAP层实施例还具有以下优点:可以从主动层和组织表面32之间高效排空界面凝胶42。
通常,由于压力分布而难以从平坦层与软质基底之间挤出凝胶,压力分布通常在接触的外部区域具有最大值,而在中间附近具有最小值。结果,净凝胶流通常被引向界面区域的中心。为了在整个接触区域上实现净流出(即向边缘传输),压力必须从中间的最大值连续减小到边缘的零或最小值。这可以通过本实施例的单个EAP元件致动器来实现,所述单个EAP元件致动器最初具有宏观的凸形(预弯曲或经由致动),并且缓慢地适应平坦的形状。
根据另一种变型,还可以通过小的横向(往复)运动(即来回运动)来实现从界面元件的一个实施例与组织表面之间的凝胶净流出。在每个横向运动中,后缘的流出量大于前缘的流入量,导致净流出。借助于一排EAP元件或适当适配的EAP层,可以根据专用控制模式进行这种交替的横向运动,以驱动凝胶从元件与组织表面之间排出。
从界面元件和组织表面之间排空凝胶可能有助于在两个表面之间提供最紧密的接触,以实现最佳的声学连接。
根据本发明的一个方面,还提供了一种用于向对象施加超声的超声设备,所述设备包括根据本发明的任何实施例的超声界面元件。设备的结构可以基本上如图4-9中所示,其中,提供了超声换能器34,超声换能器34具有覆盖在其上方的根据本发明的超声界面元件10。优选地,如在图4-9的每个示例中,在超声换能器与超声透射层14之间可以存在一层顺应性凝胶24,以促进这两个组件之间的良好的声学界面。
根据本发明的实施例的超声成像设备可以被提供为超声探头或超声贴片(适合于长期监测)的一部分,例如表面探头或作为腔内探头的一部分。该设备还可用于经食道回声(TEE)和支气管内超声检查。
在另一个实施例中,这样的超声界面元件形成了基于超声的监测贴片的一部分,所述超声贴片被布置为监测血液动力学参数的变化,例如在延长的时间段内的血流。这具有确保贴片在整个监测时间内声学耦合到皮肤而不会受到用户干扰的好处。超声界面元件与入射组织(皮肤)表面的贴合性允许避免在接口处形成气泡,从而确保提高了测量信号的质量。
可以进一步提供可操作地耦合到超声换能器34的成像控制器,用于处理在换能器处接收的超声回波以产生超声图像。
根据本发明的实施例的超声成像或监视设备可以形成更宽的超声诊断成像或监视系统的一部分或被提供为更宽的超声诊断成像或监视系统的一部分。
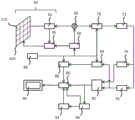
现在将参照图10描述示例性超声系统的一般操作。
所述示例性系统包括阵列换能器探头60,其具有CMUT换能器阵列100,用于发射超声和接收回波信息。换能器阵列100可以替代包括由诸如PZT或PVDF的材料形成的压电换能器。换能器阵列100是换能器的二维阵列,其能够在2D平面或者在三维中进行扫描以进行3D成像。在另一个示例中,换能器阵列可以是1D阵列。
换能器阵形例100被耦合到探头中的微波束形成器62,其控制由CMUT阵列单元或压电元件进行的对信号的接收。微波束能够至少部分波束形成由换能器的子阵列(或“组”或“贴片”)接收的信号,如US5997479(Savord等人),6013032(Savord)和6623432(Powers等人)中所述。
请注意,微波束形成器完全是任选的。以下示例假设没有模拟波束形成。
微波束形成器62由探头线缆耦合到发射/接收(T/R)开关66,其在发射和接收之间进行切换并且在微波束形成器不被使用并且换能器阵列由主系统波束形成器直接操作时保护微波束形成器70免受高能量发射信号损坏。从换能器阵列60的超声束的发射由通过T/R开关66耦合到微波束形成器和主发射波束形成器(未示出)的换能器控制器68指示,其从用户对用户接口或控制面板88的操作接收输入。
由换能器控制器68控制的功能之一是波束被转向和聚焦的取向。波束可以被操纵为从换能器阵列垂直向前(垂直于换能器阵列),或者以不同的角度用于更宽的视场。换能器阵列68可以被耦合以控制针对CMUT阵列的DC偏置控制器95。DC偏置控制器95设置被应用到CMUT单元的(一个或多个)偏置电压。
在接收通道中,部分波束形成的信号由微波束形成器62产生并且被耦合到主接收波束形成器70,其中来自各个换能器贴片的部分波束形成的信号被组合成完全波束形成的信号。例如,主波束形成器70可以具有128个通道,其中的每个接收来自CMUT换能器单元或压电元件的数十或者数百的部分波束形成的信号。以此方式,由换能器阵列的数千个换能器接收到的信号可以有效地贡献于单个波束形成的信号。
波束形成的接收信号被耦合到信号处理器72。信号处理器72可以以各种方式处理接收到的回波信号,诸如带通滤波,抽取,I和Q分量分离以及用于分离线性和非线性信号的谐波信号分离,以便能够识别从组织和微泡返回的非线性(基频的高次谐波)回波信号。处理器还可以执行的信号增强,例如纹波降低、信号复合以及噪声消除。信号处理器中的带通滤波器可以是跟踪滤波器,其中,其通带随着回波信号从增加的深度被接收而从较高的频带滑落到较低的频带,从而拒绝来自更大尝试的较高频率处的噪声,其中,这些频率没有解剖信息。
用于发射和接收的波束形成器在不同的硬件中实现,并且可以具有不同的功能。当然,接收器波束形成器被设计成考虑发射波束形成器的特性。在图10中,为了简单起见,仅示出了接收器波束形成器62、70。在整个系统中,还将存在具有发射微波束形成器和主发射波束形成器的发射链。
微波束形成器62的功能是提供信号的初始组合,以减少模拟信号路径的数量。这通常在模拟域中执行。
最终的波束形成在主波束形成器70中完成,并且通常在数字化之后。
发射和接收通道使用具有固定频带的相同换能器阵列60'。然而,发射脉冲占用的带宽可以根据已经使用的传输波束形成而变化。接收通道可以捕获整个传感器带宽(这是经典方法),或者通过使用带通处理,它只能提取包含有用信息的带宽(例如主谐波的谐波)。
经处理的信号耦合到B模式(即亮度模式或2D成像模式)处理器76和多普勒处理器78。B模式处理器76采用对接收到的超声信号的幅度的检测,用于对身体中的结构(例如身体中的器官的组织和血管)进行成像。身体的结构的B模式处理器可以以谐波图像模式或者基波图像模式或者两者的组合来形成,如在美国专利US 6283919(Roundhill等人)和美国专利US 6458083(Jago等人)中所描述。多普勒处理器78可以处理来自组织运动和血液流动的时间上分立的信号,用于检测物质的运动,例如图像场中的血细胞的流动。多普勒处理器78通常包括壁滤波器,其具有可以被设置为和/或拒绝从身体中的选定类型的材料返回的回波的参数。
将由B模式和多普勒处理器生成的结构和运动信号耦合到扫描转换器82和多平面重新格式化器94。扫描转换器82以期望的图像格式来根据回波信号被接收的空间关系来布置回波信号。例如,扫描转换器可以将回波信号布置为二维扇区形格式,或者锥体三维(3D)图像。扫描转换器可以将具有对应于图像场中的点的运动的颜色的B模式结构图像与它们的多普勒估计的速度叠加以生成彩色多普勒图像,其描绘图像场中的组织的运动和血液流动。多平面重新格式化器将从身体的体积区域中的共同平面中的点接收到的回波转换为该平面的超声图像,如在美国专利US 6443896(Detmer)中所描述。体积绘制器92将3D数据集的回波信号转换成如从给定参考点所看到的投影的3D图像,如在美国专利US 6530885(Entrekin等人)中所描述。
2D或3D图像被从扫描转换器82、多平面重新格式化器94、以及体积绘制器92耦合到图像处理器80用于进一步增强、缓存和临时存储,以在图像显示器90上显示。除了用于成像外,由多普勒处理器78生成的血流值以及由B模式处理器76生成的组织结构信息被耦合到量化处理器84。所述量化处理器生成不同流动状况的量度(例如,血流的体积率)以及结构测量结果(例如,器官的大小和孕龄)。量化处理器46可以接收来自用户控制面板88的输出,例如,要进行测量的图像的解剖结构中的点。来自量化处理器的输出数据被耦合到图形处理器86,用于利用显示器90上的图像再现测量图形和值,并且用于从显示设备90输出音频。图形处理器86也可以生成图形叠加以用于与超声图像一起显示。这些图形叠加可以包括标准识别信息,例如图像的患者姓名、日期和时间、成像参数等等。出于这些目的,图形处理器从用户接口88接收输入,例如患者姓名。所述用户接口还耦合到发射控制器68以控制来自换能器阵列60的超声信号生成,并因此控制由换能器阵列和超声系统生成的图像。控制器68的发射控制功能仅是所执行的功能之一。控制器68还考虑操作模式(由用户给出)以及接收器模数转换器中相应的所需发射器配置和带通配置。控制器68可以是具有固定状态的状态机。
用户接口也可以被耦合到多平面重新格式化器94以选择和控制多个经多平面重新格式化的(MPR)的图像的平面,其可以被用于执行MPR图像的图像场中的量化的度量。
尽管在上文的详细描述中,已经针对EAP描述了根据本发明的设备和系统的构造和操作,但是本发明实际上可以用于基于其他种类的响应性材料(包括其他种类的EAM材料)的设备。因此,除非另外指出,否则上述EAP材料可以用其他响应性材料例如其他EAM材料代替。这样的其他响应性材料在本领域中是已知的,并且本领域技术人员将知道在哪里找到它们以及如何使用它们。
适用于EAP元件的材料是已知的。电活性聚合物包括但不限于以下子类:压电聚合物、机电聚合物、弛豫铁电聚合物、电致伸缩聚合物、介电弹性体、液晶弹性体、共轭聚合物、离子聚合物金属复合物、离子凝胶和聚合物凝胶。
子类电致伸缩聚合物包括但不限于:
聚偏二氟乙烯(PVDF),聚偏二氟乙烯-三氟乙烯(PVDF-TrFE),聚偏二氟乙烯-三氟乙烯-氯氟乙烯(PVDF-TrFE-CFE),聚偏二氟乙烯-三氟乙烯-三氟氯乙烯(PVDF-TrFE-CTFE),聚偏二氟乙烯-六氟丙烯(PVDF-HFP),聚氨酯或其共混物。
子类介电弹性体包括但不限于:丙烯酸酯,聚氨酯,有机硅。
子类共轭聚合物包括但不限于:聚吡咯,聚-3,4-亚乙二氧基噻吩,聚对亚苯基硫醚,聚苯胺。
在所有这些示例中,可以提供额外的非活动层,用于响应于施加的电场而影响EAP元件的电和/或机械行为。
每个EAP元件可以被夹在电极之间。电极可以是可拉伸的,使得它们跟随EAP材料的变形。适用于电极的材料应是超声可透射的材料,并且例如包括金属薄膜,例如,金、铜或铝,或有机导体,例如炭黑、碳纳米管、石墨烯、聚苯胺(PANI)、聚(3,4-乙撑二氧噻吩)(PEDOT)、例如聚(3,4-乙撑二氧噻吩)聚(苯乙烯磺酸盐)(PEDOT:PSS)。
如果电极以非对称结构布置,则施加的电压可以引起各种变形,例如扭曲、滚动、扭转、转动和非对称弯曲变形。
如上所述,本发明的实施例利用控制器。控制器可以用软件和/或硬件以多种方式实现,以执行所需的各种功能。处理器是控制器的一个示例,其采用可以使用软件(例如,微代码)编程的一个或多个微处理器来执行所需的功能。然而,控制器可以在采用或不采用处理器的情况下实现,并且还可以被实现为用于执行一些功能的专用硬件与用于执行其他功能的处理器(例如,一个或多个编程的微处理器和相关联的电路)的组合。
可以在本公开的各种实施例中使用的控制器部件的范例包括但不限于,常规微处理器,专用集成电路(ASIC)和现场可编程门阵列(FPGA)。
在各种实现方式中,处理器或控制器可以与一个或多个存储介质相关联,诸如易失性和非易失性计算机存储器,例如RAM、PROM、EPROM和EEPROM。存储介质可以编码有一个或多个程序,所述程序当在一个或多个处理器和/或控制器上执行时执行所需的功能。各种存储介质可以固定在处理器或控制器内,或者可以是可转移的,使得存储在其上的一个或多个程序可以加载到处理器或控制器中。
本领域技术人员通过研究附图、公开内容以及权利要求书,在实践请求保护的本发明时能够理解并且实现对所公开的实施例的其他变型。在权利要求中,“包括”一词不排除其他元件或步骤,并且词语“一”或“一个”不排除多个。尽管特定措施是在互不相同的从属权利要求中记载的,但是这并不指示不能有利地使用这些措施的组合。权利要求书中的任何附图标记不应被解释为对范围的限制。
Claims (14)
1.一种超声界面元件(10),包括:
超声透射主动层(14),其包括适于响应电磁刺激而变形的一个或多个响应性材料元件(16),并且所述主动层具有适于施加到入射组织表面(32)的上接触表面;以及
控制器(28),其被耦合到所述一个或多个响应性材料元件;
其中,所述主动层(14)能够被配置为在第一状态中,在所述第一状态中,所述主动层的所述上接触表面的初始线或区域部分相对于周围区域部分升高,并且其中,
所述控制器(28)适于通过转变施加到所述一个或多个响应性材料元件的所述电磁刺激的水平来控制所述一个或多个响应性材料元件以将所述主动层变形到平面外,从而使所述初始线或区域部分平滑地向外扩展以形成最终的较大区域部分,从而在所述主动层与所述入射组织表面之间建立渐近地扩展的界面,
所述控制包括:控制由所述主动层所包括的响应性材料元件的阵列以从所述初始线或区域部分向外并且跨过所述较大区域部分的顺序图案变形,或者控制由所述主动层所包括的单个响应性材料元件(16)延伸跨过至少所述较大区域部分,以从初始凸形形状转变到第二凸度较小的形状。
2.根据权利要求1所述的超声界面元件(10),其中,所述主动层(14)包括在整个层上延伸的响应性材料元件(16),并且所述控制器(28)适于控制所述响应性材料元件从初始凸形形状渐近地移动为凸度较小的形状,从而在被施加到所述入射组织表面时,建立适形的界面,从所述凸形形状的顶点渐近地向外扩展到所述凸度较小的形状的更广的区域。
3.根据权利要求1所述的超声界面元件(10),其中,
所述主动层(14)包括响应性材料元件(16)的阵列,并且
所述控制器(28)适于控制所述阵列中的所述响应性材料元件,以从所述阵列内与所述初始线或区域部分相对应的单个响应性材料元件或响应性材料元件线向外的顺序图案变形,从而在所述主动层与所述入射组织表面之间建立所述渐近地扩展的界面,随着所述响应性材料元件被控制,所述渐近地扩展的界面的区域从所述单个响应性材料元件或响应性材料元件线向外扩展。
4.根据权利要求3所述的超声界面元件(10),其中,
所述控制器(28)适于控制所述响应性材料元件(16)以从所述单个响应性材料元件或响应性材料元件线沿所有方向向外的顺序图案变形;或者
所述控制器适于控制所述响应性材料元件以从所述单个响应性材料元件或响应性材料元件线沿着一个或多个方向的子集向外的顺序图案变形。
5.根据权利要求1-4中的任一项所述的超声界面元件(10),其中,所述超声界面元件包括用于引起所述主动层(14)的振动的振动器件,并且任选地,其中,所述振动器件由所述响应性材料元件(16)中的一个或多个提供,所述控制器适于控制所述响应性材料元件以表现出振荡变形。
6.根据权利要求3或4所述的超声界面元件(10),其中,所述超声界面元件包括用于感测所述主动层(14)与所述入射组织表面(32)之间的压力分布的接触压力感测器件。
7.根据权利要求6所述的超声界面元件(10),其中,所述控制器(28)适于:
基于感测到的所述分布,识别所述主动层(14)与所述入射组织表面(32)之间的最低接触压力的线或子区域;
识别与识别出的所述最低接触压力的线或子区域在空间上对齐的单个响应性材料元件(16)或响应性材料元件线;并且
选择识别出的所述单个响应性材料元件或响应性材料元件线作为所述顺序图案中的单个响应性材料元件或响应性材料元件线。
8.根据权利要求6所述的超声界面元件(10),其中,所述接触压力感测器件由所述响应性材料元件(16)中的一个或多个提供,所述控制器(28)适于在初始将所述主动层(14)手动施加到到所述入射组织表面后基于由所述一个或多个响应性材料元件生成的压力引起的电输出来感测所述接触压力。
9.根据权利要求1-4中的任一项所述的超声界面元件(10),其中,所述超声界面元件包括用于识别所述主动层(14)与所述入射组织表面(32)之间的接触区域的接触感测器件。
10.根据权利要求9所述的超声界面元件(10),其中,所述接触感测器件包括跨所述主动层(14)的主表面分布并且电耦合到所述控制器(28)的可单独寻址电极(38)的阵列,并且任选地,其中,所述控制器适于:
检测所述电极中任何两个之间的电流,并且使用所述电流作为所述电极与所述入射组织表面(32)之间接触的指示;或者
监测所述电极中的一对或多对之间的电容,并使用所述电容的变化作为所述电极与所述入射组织表面之间接触的指示。
11.根据权利要求10所述的超声界面元件(10),其中,所述电极阵列(38)既用于刺激所述响应性材料元件(16)的变形,又用于感测所述主动层(14)与所述入射组织表面(32)之间的接触。
12.根据权利要求1-4中的任一项所述的超声界面元件(10),其中,所述控制器(28)适于根据一种控制模式来控制所述响应性材料元件(16)中的一个或多个在与所述主动层(14)的表面基本平行的方向上变形,从而促进设置在所述主动层与所述入射组织表面(32)之间的界面流体或凝胶(42)的侧向输送。
13.一种超声设备,包括:
承载体;
分布在所述承载体上的一个或多个超声换能器(34);以及
根据权利要求1至12中任一项所述的超声界面元件(10),其被布置在所述一个或多个超声换能器的声输出路径中,用于建立所述换能器与所述超声设备适于施加到的入射组织表面(32)之间的界面。
14.一种在超声界面元件(10)与所述元件适于被施加到的入射组织表面(32)之间建立界面的方法,所述超声界面元件包括超声透射主动层(14),所述主动层包括适于响应电磁刺激而变形的一个或多个响应性材料元件(16),并且
其中,所述主动层(14)能够被配置为在第一状态中,在所述第一状态中,所述主动层的上接触表面的初始线或区域部分相对于周围区域部分升高;
并且所述方法包括:
通过转变施加到所述一个或多个响应性材料元件的所述电磁刺激的水平来控制所述一个或多个响应性材料元件以将所述主动层变形到平面外,以使所述初始线或区域部分平滑地向外扩展,以形成最终的较大区域部分,从而在所述主动层与入射组织表面之间渐近地建立界面,
所述控制包括:控制由所述主动层所包括的响应性材料元件的阵列以从所述初始线或区域部分向外并且跨过所述较大区域部分的顺序图案变形,或者控制由所述主动层所包括的单个响应性材料元件(16)延伸跨过至少所述较大区域部分,以从初始凸形形状转变到第二凸度较小的形状。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP17179486.0A EP3424602A1 (en) | 2017-07-04 | 2017-07-04 | Ultrasound interface element and method |
| EP17179486.0 | 2017-07-04 | ||
| PCT/EP2018/067359 WO2019007787A1 (en) | 2017-07-04 | 2018-06-28 | ULTRASONIC INTERFACE ELEMENT AND METHOD |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN111050930A CN111050930A (zh) | 2020-04-21 |
| CN111050930B true CN111050930B (zh) | 2022-02-08 |
Family
ID=59294950
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201880057035.5A Active CN111050930B (zh) | 2017-07-04 | 2018-06-28 | 超声界面元件和方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11538453B2 (zh) |
| EP (2) | EP3424602A1 (zh) |
| JP (1) | JP7191049B2 (zh) |
| CN (1) | CN111050930B (zh) |
| WO (1) | WO2019007787A1 (zh) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB201809007D0 (en) * | 2018-06-01 | 2018-07-18 | Smith & Nephew | Restriction of sensor-monitored region for sensor-enabled wound dressings |
| US11738369B2 (en) * | 2020-02-17 | 2023-08-29 | GE Precision Healthcare LLC | Capactive micromachined transducer having a high contact resistance part |
| CN112406096B (zh) * | 2020-11-23 | 2022-02-15 | 华中科技大学 | 一种浸润性主动调节装置及其制备方法 |
| CN113628607B (zh) * | 2021-08-05 | 2023-07-18 | 青岛大学 | 一种声学天线及其应用 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1566940A (zh) * | 2003-06-16 | 2005-01-19 | 财团法人工业技术研究院 | 可挠式基板的微型超声波换能器 |
| WO2014077931A2 (en) * | 2012-08-28 | 2014-05-22 | President And Fellows Of Harvard College | Adaptive optic and acoustic devices |
| CN104042329A (zh) * | 2013-03-12 | 2014-09-17 | 韦伯斯特生物官能(以色列)有限公司 | 导管的力反馈装置和方法 |
| CN203988271U (zh) * | 2014-08-07 | 2014-12-10 | 王燕青 | 一种自动式动脉穿刺器 |
| CN104756521A (zh) * | 2012-10-26 | 2015-07-01 | 富士胶片戴麦提克斯公司 | 具有多谐波模式的微机械超声波换能器阵列 |
| CN104819119A (zh) * | 2004-12-14 | 2015-08-05 | 麦德医像公司 | 致动器泵系统 |
| CN105247889A (zh) * | 2013-03-21 | 2016-01-13 | 诺威托系统有限公司 | 换能器系统 |
| CN106030798A (zh) * | 2014-02-24 | 2016-10-12 | Mc10股份有限公司 | 具有变形指示器的适形电子器件 |
| WO2016180636A1 (en) * | 2015-05-11 | 2016-11-17 | Koninklijke Philips N.V. | Deformable ultrasound array and system |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS53107190A (en) | 1977-03-01 | 1978-09-18 | Tokyo Shibaura Electric Co | Electron scan ultrasonic diagnosing device |
| US6283919B1 (en) | 1996-11-26 | 2001-09-04 | Atl Ultrasound | Ultrasonic diagnostic imaging with blended tissue harmonic signals |
| US6458083B1 (en) | 1996-11-26 | 2002-10-01 | Koninklijke Philips Electronics N.V. | Ultrasonic harmonic imaging with adaptive image formation |
| US6013032A (en) | 1998-03-13 | 2000-01-11 | Hewlett-Packard Company | Beamforming methods and apparatus for three-dimensional ultrasound imaging using two-dimensional transducer array |
| US5997479A (en) | 1998-05-28 | 1999-12-07 | Hewlett-Packard Company | Phased array acoustic systems with intra-group processors |
| US6530885B1 (en) | 2000-03-17 | 2003-03-11 | Atl Ultrasound, Inc. | Spatially compounded three dimensional ultrasonic images |
| US6443896B1 (en) | 2000-08-17 | 2002-09-03 | Koninklijke Philips Electronics N.V. | Method for creating multiplanar ultrasonic images of a three dimensional object |
| US6468216B1 (en) | 2000-08-24 | 2002-10-22 | Kininklijke Philips Electronics N.V. | Ultrasonic diagnostic imaging of the coronary arteries |
| US20060030780A1 (en) * | 2004-08-03 | 2006-02-09 | Jean-Francois Gelly | System and method providing controllable attenuation of an ultrasound probe |
| JP5394021B2 (ja) | 2008-08-06 | 2014-01-22 | アイシン精機株式会社 | アルミニウム合金ピストン部材およびその製造方法 |
| US20110319768A1 (en) | 2009-03-04 | 2011-12-29 | Panasonic Corporation | Ultrasonic transducer, ultrasonic probe, and ultrasonic diagnostic device |
| US9456800B2 (en) * | 2009-12-18 | 2016-10-04 | Massachusetts Institute Of Technology | Ultrasound scanning system |
| US9220477B2 (en) * | 2009-12-18 | 2015-12-29 | Konica Minolta, Inc. | Ultrasonic diagnostic device, and region-to-be-detected image display method and measurement method using same |
| US8781565B2 (en) * | 2011-10-04 | 2014-07-15 | Qualcomm Incorporated | Dynamically configurable biopotential electrode array to collect physiological data |
| KR101362378B1 (ko) * | 2011-12-13 | 2014-02-13 | 삼성전자주식회사 | 초음파 진단장치용 프로브 |
| JP2016507267A (ja) * | 2012-12-21 | 2016-03-10 | ポール ホセイト, | バルーン内部から撮像するための撮像カテーテル |
| EP3232904A1 (en) | 2014-12-18 | 2017-10-25 | Koninklijke Philips N.V. | Measuring of a physiological parameter using a wearable sensor |
| JP6589053B2 (ja) | 2015-08-31 | 2019-10-09 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 電気活性ポリマーに基づくアクチュエータ及びセンサデバイス |
-
2017
- 2017-07-04 EP EP17179486.0A patent/EP3424602A1/en not_active Withdrawn
-
2018
- 2018-06-28 JP JP2019571676A patent/JP7191049B2/ja active Active
- 2018-06-28 CN CN201880057035.5A patent/CN111050930B/zh active Active
- 2018-06-28 US US16/628,532 patent/US11538453B2/en active Active
- 2018-06-28 EP EP18737545.6A patent/EP3648903B1/en active Active
- 2018-06-28 WO PCT/EP2018/067359 patent/WO2019007787A1/en unknown
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1566940A (zh) * | 2003-06-16 | 2005-01-19 | 财团法人工业技术研究院 | 可挠式基板的微型超声波换能器 |
| CN104819119A (zh) * | 2004-12-14 | 2015-08-05 | 麦德医像公司 | 致动器泵系统 |
| WO2014077931A2 (en) * | 2012-08-28 | 2014-05-22 | President And Fellows Of Harvard College | Adaptive optic and acoustic devices |
| CN104756521A (zh) * | 2012-10-26 | 2015-07-01 | 富士胶片戴麦提克斯公司 | 具有多谐波模式的微机械超声波换能器阵列 |
| CN104042329A (zh) * | 2013-03-12 | 2014-09-17 | 韦伯斯特生物官能(以色列)有限公司 | 导管的力反馈装置和方法 |
| CN105247889A (zh) * | 2013-03-21 | 2016-01-13 | 诺威托系统有限公司 | 换能器系统 |
| CN106030798A (zh) * | 2014-02-24 | 2016-10-12 | Mc10股份有限公司 | 具有变形指示器的适形电子器件 |
| CN203988271U (zh) * | 2014-08-07 | 2014-12-10 | 王燕青 | 一种自动式动脉穿刺器 |
| WO2016180636A1 (en) * | 2015-05-11 | 2016-11-17 | Koninklijke Philips N.V. | Deformable ultrasound array and system |
Also Published As
| Publication number | Publication date |
|---|---|
| CN111050930A (zh) | 2020-04-21 |
| US11538453B2 (en) | 2022-12-27 |
| JP7191049B2 (ja) | 2022-12-16 |
| WO2019007787A1 (en) | 2019-01-10 |
| EP3648903A1 (en) | 2020-05-13 |
| EP3424602A1 (en) | 2019-01-09 |
| JP2020525147A (ja) | 2020-08-27 |
| US20200219480A1 (en) | 2020-07-09 |
| EP3648903B1 (en) | 2022-04-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111050930B (zh) | 超声界面元件和方法 | |
| EP3541289B1 (en) | Ultrasound device contacting | |
| JP2018523340A (ja) | 変形可能な超音波アレイ及びシステム | |
| CN103454644B (zh) | 处理装置、超声波设备、超声波探测器及超声波诊断装置 | |
| CN110997165B (zh) | 电容式微机械超声换能器(cmut)设备和控制方法 | |
| WO2017182344A1 (en) | Ultrasound transducer positioning | |
| RU2756022C2 (ru) | Ультразвуковое устройство и акустический компонент для использования в таком устройстве | |
| CN106166078A (zh) | 超声波感测装置及其感测方法 | |
| US9770740B2 (en) | Ultrasonic transducer and ultrasonic diagnostic apparatus including the same | |
| JP2018056734A (ja) | 超音波トランスデューサ、その製造方法および超音波撮像装置 | |
| US20160047780A1 (en) | Methods of operating ultrasonic transducers, and ultrasonic devices | |
| WO2017182416A1 (en) | Ultrasound transducer positioning | |
| KR102077741B1 (ko) | 초음파 변환기 및 이를 채용한 초음파 진단장치 | |
| CN111107947B (zh) | 超声换能器设备及其控制方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |