CN110689795A - 一种中俄贸易运输路线规划模拟装置 - Google Patents
一种中俄贸易运输路线规划模拟装置 Download PDFInfo
- Publication number
- CN110689795A CN110689795A CN201911140226.0A CN201911140226A CN110689795A CN 110689795 A CN110689795 A CN 110689795A CN 201911140226 A CN201911140226 A CN 201911140226A CN 110689795 A CN110689795 A CN 110689795A
- Authority
- CN
- China
- Prior art keywords
- movably connected
- contact
- transportation route
- main support
- swing joint
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Classifications
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B25/00—Models for purposes not provided for in G09B23/00, e.g. full-sized devices for demonstration purposes
Landscapes
- Engineering & Computer Science (AREA)
- Business, Economics & Management (AREA)
- Physics & Mathematics (AREA)
- Educational Administration (AREA)
- Educational Technology (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Photovoltaic Devices (AREA)
Abstract
本发明公开了一种中俄贸易运输路线规划模拟装置,涉及贸易运输辅助设施技术领域,包括主支架,所述主支架的背面活动连接有挡板,所述主支架的正面活动连接有安装座,所述安装座的顶部活动连接有回程机构,所述主支架的背面活动连接有驱动电机,所述主支架的顶部活动连接有副支架。该中俄贸易运输路线规划模拟装置,具备可自动追踪光线入射角度和自动调节自身角度的优点,提高了光伏板的光电转换效率,通过自动追踪入射光线角度,可根据入射角度的不同自动调整自身的角度,保证光伏板与光线入射角度之间始终处于规定的范围,极大的提升了电力输出的稳定性。同时,节省了大量的人力,为贸易运输路线规划的模拟提供了有力的保障。
Description
技术领域
本发明涉及贸易运输辅助设施技术领域,具体为一种中俄贸易运输路线规划模拟装置。
背景技术
贸易运输路线规划,往往应用于尚未开辟出正式路线或需要开辟新的运输路线的两地,贸易路线分为陆路、水路及空运。陆路包括铁路、公路、管道等,也包括桥梁、车站、库房、供给站等。水路包括航道、港口码头、航标等。航空路线包含跑道、修理机构、气象站及雷达设施。由于俄罗斯与我国的领土直接接壤,因此双方的贸易运输多依靠陆路进行,随着近年来两国之间合作程度的加深,贸易量也较之前有较大提升。为了保证贸易的正常进行,开辟新的贸易路线成了当下行之有效的办法。
在进行运输路线的规划建设时,需要对建设路线进行实地的考察并且进行大量的实践模拟,以收集后期施工所需的参数,因此需要大量的基础和保障设施提供支持,其中电力供应设施作为施工时的必备设施,其重要性不言而喻。大部分道路施工地点在施工前并无完善的电力保障,因此在施工前期电路尚未架设完成之前需要调动大量的电力工程设备以保证电力供应。常用的电力工程设备主要包括柴油发电机及其配套装置,由于其工作时需要燃烧柴油作为动力,因此会产生大量的污染物和噪音,对施工的环境造成了一定的污染并且在长期充满噪音的环境中工作,既容易导致工作人员听力受损,还可能会造成信息传达不清,影响建设的进度。因此,随着近年来太阳能发电技术的成熟,越来越多的电力设施开始向利用太阳能发电发展。
太阳能发电主要以光伏板作为发电载体,通过太阳光的照射,利用其内部结构完成电能转换的过程。但是在进行运输路线的规划建设时,受地域和地形的影响,太阳的光照条件和光照角度随时都在变化,导致光伏板与入射光线之间的角度无法保持在规定的范围内,造成光伏板的工作和光电转换效率低下,无法满足建设设备的用电需求,甚至会直接影响整个运输路线的规划建设。
市场上虽然有可以对光伏板角度进行调节的设备,但是其调节过程一般较为繁琐且不够精确,调节仅仅以人的感觉为依据,无法做到对光线入射角度的精准调节。同时,由于太阳的运动,其光线入射角度的变化跨度较大,仅仅依靠人工手动调节,需要耗费大量的时间,严重的影响了运输路线的规划建设。
为解决上述问题,发明者提出了一种中俄贸易运输路线规划模拟装置,作为提供电力输出的主要设备,具备可自动追踪光线入射角度和自动调节自身角度的优点,提高了光伏板的光电转换效率,通过自动追踪入射光线角度,可根据入射角度的不同自动调整自身的角度,保证光伏板与光线入射角度之间始终处于规定的范围,极大的提升了电力输出的稳定性。同时,节省了大量的人力,为贸易运输路线规划的模拟提供了有力的保障。
发明内容
为实现上述可自动追踪光线入射角度和自动调节自身角度的目的,本发明提供如下技术方案:一种中俄贸易运输路线规划模拟装置,包括主支架、挡板、安装座、回程机构、驱动电机、副支架、连轴、安装板、光伏板、进光孔、光敏开关、电控机构、驱动齿轮、限位框、电磁装置、活动触点、固定触点、传动盘、定位盘、传送槽、定位框、进口端、出口端、触点组、挡块、限位弹簧、回程触点。
上述结构的位置及连接关系如下:
所述主支架的背面活动连接有挡板,所述主支架的正面活动连接有安装座,所述安装座的顶部活动连接有回程机构,所述主支架的背面活动连接有驱动电机,所述主支架的顶部活动连接有副支架,所述副支架的内部活动连接有连轴,所述主支架的背面活动连接有安装板,所述安装板的顶部活动连接有光伏板,所述光伏板的内部开设有进光孔,所述进光孔的内部活动连接有光敏开关,所述挡板的背面活动连接有电控机构,所述驱动电机的背面活动连接有驱动齿轮。
所述电控机构包括限位框,所述限位框的内部活动连接有电磁装置,所述电磁装置的左侧活动连接有活动触点,所述限位框的右侧活动连接有固定触点。
所述回程机构包括传动盘,所述传动盘的外侧活动连接有定位盘,所述定位盘的内部开设有传送槽,所述定位盘的外侧活动连接有定位框,所述定位框的顶部开设有进口端,所述定位框的底部开设有出口端,所述进口端的内部活动连接有触点组,所述出口端的内部活动连接有挡块,所述挡块的外侧活动连接有限位弹簧,所述出口端的底部固定连接有回程触点。
作为优选,所述回程触点位于出口端的底部,且其位置处于挡块和限位弹簧的下方。
作为优选,所述定位盘与定位框的圆心为同一点,且定位盘位于定位框的内部,即定位框的内径与定位盘的外径相适配,并且二者之间间隙不大于一厘米。
作为优选,所述触点组包括的四个分触点之间,均为电性连接。
作为优选,所述传送槽的开口端设置为曲面状。
作为优选,所述主支架共设置有两个,两个主支架之间设置有栅格状加强筋。
与现有技术及产品相比,本发明的有益效果是:
1、该中俄贸易运输路线规划模拟装置,通过将传送槽的开口端设置为曲面状,可在装置使用过程中,使触点组的分触点更容易进入出口端,起到导向和减少摩擦的作用,提高了该装置使用时的精确性。
2、该中俄贸易运输路线规划模拟装置,通过进光孔、光敏开关和电控机构的配合使用,利用太阳自身在不同时间内角度的变化,保证了光伏板始终与太阳入射光线之间保持合适的角度,提高了光伏板光电转换的效率,增加了该装置使用时性能的稳定性。
3、该中俄贸易运输路线规划模拟装置,具备可自动追踪光线入射角度和自动调节自身角度的优点,提高了光伏板的光电转换效率,通过自动追踪入射光线角度,可根据入射角度的不同自动调整自身的角度,保证光伏板与光线入射角度之间始终处于规定的范围,极大的提升了电力输出的稳定性。同时,节省了大量的人力,为贸易运输路线规划的模拟提供了有力的保障。
附图说明
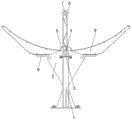
图1为本发明连接结构前视图;
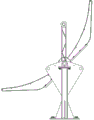
图2为本发明图1中结构运动轨迹图一;
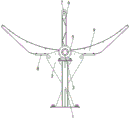
图3为本发明图1中结构运动轨迹图二;
图4为本发明连接结构后视图;
图5为本发明连接结构俯视图;
图6为本发明连接结构侧视图;
图7为本发明光伏板、进光孔与光敏开关连接结构示意图;
图8为本发明图7中A处结构放大图;
图9为本发明挡板与电控机构连接结构示意图;
图10为本发明电控机构连接结构示意图;
图11为本发明图10中各结构及电控机构运动轨迹示意图;
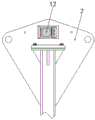
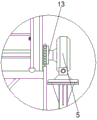
图12为本发明图6中B处结构放大图;
图13为本发明连接结构运动轨迹示意图;
图14为本发明回程机构连接结构剖视图;
图15为本发明图14中C处结构放大图;
图16为本发明图15中各结构运动轨迹示意图;
图17为本发明图13中各结构及回程机构运动轨迹示意图;
图18为本发明图14中D处结构放大图。
图中:1、主支架;2、挡板;3、安装座;4、回程机构;5、驱动电机;6、副支架;7、连轴;8、安装板;9、光伏板;10、进光孔;11、光敏开关;12、电控机构;13、驱动齿轮;121、限位框;122、电磁装置;123、活动触点;124、固定触点;41、传动盘;42、定位盘;43、传送槽;44、定位框;45、进口端;46、出口端;47、触点组;48、挡块;49、限位弹簧;410、回程触点;
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-18:
该中俄贸易运输路线规划模拟装置,包括主支架1、挡板2、安装座3、回程机构4、驱动电机5、副支架6、连轴7、安装板8、光伏板9、进光孔10、光敏开关11、电控机构1和驱动齿轮13。
上述各结构的位置及连接关系如下:
主支架1的背面活动连接有挡板2,主支架1的正面活动连接有安装座3,安装座3的顶部活动连接有回程机构4,主支架1的背面活动连接有驱动电机5,主支架1的顶部活动连接有副支架6,副支架6的内部活动连接有连轴7,主支架1的背面活动连接有安装板8,安装板8的顶部活动连接有光伏板9,光伏板9的内部开设有进光孔10,进光孔10的内部活动连接有光敏开关11,挡板2的背面活动连接有电控机构12,驱动电机5的背面活动连接有驱动齿轮13。
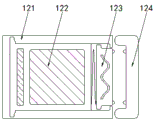
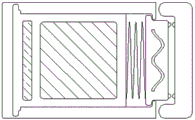
其中,电控机构12包括限位框121、电磁装置122、活动触点123和固定触点124。
上述各结构的位置及连接关系如下:
电控机构12包括限位框121,限位框121的内部活动连接有电磁装置122,电磁装置122的左侧活动连接有活动触点123,限位框121的右侧活动连接有固定触点124。
其中:回程机构4包括传动盘41、定位盘42、传送槽43、定位框44、进口端45、出口端46、触点组47、挡块48、限位弹簧49和回程触点410。
上述各结构的位置及连接关系如下:
回程机构4包括传动盘41,传动盘41的外侧活动连接有定位盘42,定位盘42的内部开设有传送槽43,定位盘42的外侧活动连接有定位框44,定位框44的顶部开设有进口端45,定位框44的底部开设有出口端46,进口端45的内部活动连接有触点组47,出口端46的内部活动连接有挡块48,挡块48的外侧活动连接有限位弹簧49,出口端46的底部固定连接有回程触点410。
其中:
a、驱动齿轮13与驱动电机5的输出轴活动连接且二者的中心在同一直线上,光伏板9的底部设置有从动齿轮,该从动齿轮与驱动齿轮13相适配且相互啮合,挡块48和限位弹簧49均设置有两个,两个挡块48和两个限位弹簧49的规格尺寸分别相同,并且以出口端46的轴线为参照呈对称分布,两个限位弹簧49的弹性系数相同,两个限位弹簧49提供的弹力的和与触点组47的四个分触点的重量相同。
b、限位框121右侧的内部设置有空腔,活动触点123位于该空腔内,该空腔的右部设置有卡块,活动触点123的外侧设置有与该卡块相适配的块状凸起;电磁装置122与光敏开关11之间单相电连接,电磁装置122与活动触点123之间活动连接有复位弹簧,固定触点124与驱动电机5之间为电连接,回程触点410位于出口端46的底部,且其位置处于挡块48和限位弹簧49的下方。
c、定位框44为半圆形,传动盘41、定位盘42与定位框44的圆心为同一点,传动盘41的圆心处开设有轴孔,该轴孔的两侧设置有对称的定位槽,该定位槽的内部活动插接有输出轴,该输出轴与光伏板9的中轴活动连接,主支架1共设置有两个,两个主支架1之间设置有栅格状加强筋。
其中:
d、触点组47由四个相同的分触点组成,四个分触点的重量相同,最上方分触点的顶部设置有电路接口,最下方分触点的底部设置有电路触点,该电路接口与外置电机单向电连接,定位盘42与定位框44的圆心为同一点,且定位盘42位于定位框44的内部,即定位框44的内径与定位盘42的外径相适配,并且二者之间间隙不大于一厘米。
e、传送槽43设置有四个,四个传送槽43以定位盘42的圆心为参照呈均匀分布,并且相邻两个传送槽43之间的角度相同,均为九十度,四个传送槽43的规格均相同,尺寸与触点组47相适配,触点组47包括的四个分触点之间,均为电性连接。
f、进口端45与出口端46的规格尺寸均相同,均为内部中空结构,该中空结构的尺寸与触点组47的尺寸相适配,并且进口端45与出口端46以定位框44的圆心为参照呈对称分布,即进口端45与出口端46的轴线在同一直线上,传送槽43的开口端设置为曲面状。
在使用时,由于电磁装置122与光敏开关11之间单相电连接,电磁装置122与活动触点123之间活动连接有复位弹簧,固定触点124与驱动电机5之间为电连接,并且驱动齿轮13与驱动电机5的输出轴活动连接且二者的中心在同一直线上,光伏板9的底部设置有从动齿轮,该从动齿轮与驱动齿轮13相适配且相互啮合,使用初始状态下即光伏板9位于6:00时,此时太阳光经过进光孔10照射在光敏开关11上,利用光敏电阻的特性,此时电磁装置122内部有电流通过即产生磁性,利用电磁原理可将活动触点123吸附,此时活动触点123与固定触点124无法接触,不能构成完整的电流回路,所以此时驱动电机5不工作,即光伏板9的角度不发生变化。
随着太阳位置的改变即光线入射角度的改变,光照无法经过进光孔10照射在光敏开关11上,此时光敏开关11无法为电磁装置122提供电力支持,即此时电磁装置122无法产生电磁效应,在复位弹簧的弹性作用下活动触点123向右运动并与固定触点124接触,此时驱动电机5的电路接通可带动驱动齿轮13转动,同时驱动齿轮13可通过从动齿轮带动光伏板9转动。
当光伏板9转动至太阳光线重新进入进光孔10后,光敏开关11位电磁装置122提供电力,与上述原理相同,此时驱动电机5停止工作,光伏板9的位置及角度不再发生变化。
上述结构及过程请参阅图1-13。
触点组47由四个相同的分触点组成,四个分触点的重量相同,最上方分触点的顶部设置有电路接口,最下方分触点的底部设置有电路触点,该电路接口与外置电机单向电连接,传动盘41的圆心处开设有轴孔,该轴孔的两侧设置有对称的定位槽,该定位槽的内部活动插接有输出轴,该输出轴与光伏板9的中轴活动连接。
初始状态下即即光伏板9位于6:00时,进口端45与第一个传送槽43的轴线重合,此时最下方的分触点进入传送槽43内,当光伏板9发生角度变化即转动时,可带动传动盘41和定位盘42同步转动,此时传送槽43带动最下方的分触点同步转动;当光伏板9继续转动至9:00时,第二个传送槽43与进口端45的轴线重合,此时第二个分触点进入第二个传送槽43内:以此类推,当光伏板分别转动至12:00和15:00时,第三个分触点和第四个分触点分别进入与之对应的传送槽43内,此时带动最下方分触点的传送槽43与出口端46的轴线重合,该分触点在重力的作用下进入出口端46内部。
与上述过程相同,当光伏板9转动至18:00时,四个分触点均位于出口端46内部。由于两个限位弹簧49提供的弹力的和与触点组47的四个分触点的重量相同,所以在前三个分触点进入出口端46时,其重力不足以压迫限位弹簧49收缩,即此时最下方的分触点无法与回程触点410接触。当全部四个分触点均位于出口端46时,其重力作用压迫限位弹簧49向内收缩,此时最下方的分触点与回程触点410接触,外置电机的电路接通并开始工作,可带动光伏板恢复至初始位置即6:00。
上述结构及过程请参阅图14-18。
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
Claims (8)
1.一种中俄贸易运输路线规划模拟装置,包括主支架(1),其特征在于:所述主支架(1)的背面活动连接有挡板(2),所述主支架(1)的正面活动连接有安装座(3),所述安装座(3)的顶部活动连接有回程机构(4),所述主支架(1)的背面活动连接有驱动电机(5),所述主支架(1)的顶部活动连接有副支架(6),所述副支架(6)的内部活动连接有连轴(7),所述主支架(1)的背面活动连接有安装板(8),所述安装板(8)的顶部活动连接有光伏板(9),所述光伏板(9)的内部开设有进光孔(10),所述进光孔(10)的内部活动连接有光敏开关(11),所述挡板(2)的背面活动连接有电控机构(12),所述驱动电机(5)的背面活动连接有驱动齿轮(13);
所述电控机构(12)包括限位框(121),所述限位框(121)的内部活动连接有电磁装置(122),所述电磁装置(122)的左侧活动连接有活动触点(123),所述限位框(121)的右侧活动连接有固定触点(124);
所述回程机构(4)包括传动盘(41),所述传动盘(41)的外侧活动连接有定位盘(42),所述定位盘(42)的内部开设有传送槽(43),所述定位盘(42)的外侧活动连接有定位框(44),所述定位框(44)的顶部开设有进口端(45),所述定位框(44)的底部开设有出口端(46),所述进口端(45)的内部活动连接有触点组(47),所述出口端(46)的内部活动连接有挡块(48),所述挡块(48)的外侧活动连接有限位弹簧(49),所述出口端(46)的底部固定连接有回程触点(410)。
2.根据权利要求1所述的一种中俄贸易运输路线规划模拟装置,其特征在于:所述驱动齿轮(13)与驱动电机(5)的输出轴活动连接且二者的中心在同一直线上,所述光伏板(9)的底部设置有从动齿轮,该从动齿轮与驱动齿轮(13)相适配且相互啮合。
3.根据权利要求1所述的一种中俄贸易运输路线规划模拟装置,其特征在于:所述限位框(121)右侧的内部设置有空腔,活动触点(123)位于该空腔内,该空腔的右部设置有卡块,所述活动触点(123)的外侧设置有与该卡块相适配的块状凸起;所述电磁装置(122)与光敏开关(11)之间单相电连接,所述电磁装置(122)与活动触点(123)之间活动连接有复位弹簧,所述固定触点(124)与驱动电机(5)之间为电连接。
4.根据权利要求1所述的一种中俄贸易运输路线规划模拟装置,其特征在于:所述定位框(44)为半圆形,传动盘(41)、定位盘(42)与定位框(44)的圆心为同一点,所述传动盘(41)的圆心处开设有轴孔,该轴孔的两侧设置有对称的定位槽,该定位槽的内部活动插接有输出轴,该输出轴与光伏板(9)的中轴活动连接。
5.根据权利要求1所述的一种中俄贸易运输路线规划模拟装置,其特征在于:所述传送槽(43)设置有四个,四个所述传送槽(43)以定位盘(42)的圆心为参照呈均匀分布,并且相邻两个传送槽(43)之间的角度相同,均为九十度,四个所述传送槽(43)的规格均相同,尺寸与触点组(47)相适配。
6.根据权利要求1所述的一种中俄贸易运输路线规划模拟装置,其特征在于:所述触点组(47)由四个相同的分触点组成,四个所述分触点的重量相同,最上方分触点的顶部设置有电路接口,最下方分触点的底部设置有电路触点,该电路接口与外置电机单向电连接。
7.根据权利要求1所述的一种中俄贸易运输路线规划模拟装置,其特征在于:所述进口端(45)与出口端(46)的规格尺寸均相同,均为内部中空结构,该中空结构的尺寸与触点组(47)的尺寸相适配,并且所述进口端(45)与出口端(46)以定位框(44)的圆心为参照呈对称分布,即进口端(45)与出口端(46)的轴线在同一直线上。
8.根据权利要求1所述的一种中俄贸易运输路线规划模拟装置,其特征在于:所述挡块(48)和限位弹簧(49)均设置有两个,两个挡块(48)和两个限位弹簧(49)的规格尺寸分别相同,并且以出口端(46)的轴线为参照呈对称分布,两个所述限位弹簧(49)的弹性系数相同,两个所述限位弹簧(49)提供的弹力的和与触点组(47)的四个分触点的重量相同。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201911140226.0A CN110689795B (zh) | 2019-11-20 | 2019-11-20 | 一种运输路线规划模拟装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201911140226.0A CN110689795B (zh) | 2019-11-20 | 2019-11-20 | 一种运输路线规划模拟装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN110689795A true CN110689795A (zh) | 2020-01-14 |
| CN110689795B CN110689795B (zh) | 2021-04-20 |
Family
ID=69117706
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201911140226.0A Active CN110689795B (zh) | 2019-11-20 | 2019-11-20 | 一种运输路线规划模拟装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN110689795B (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111313816A (zh) * | 2020-03-03 | 2020-06-19 | 绍兴市慧融臻合新能源科技有限公司 | 一种基于光感原理可自动追踪太阳轨迹的光伏板支架结构 |
Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN201742343U (zh) * | 2010-09-06 | 2011-02-09 | 南昌市常盈科技发展有限公司 | 太阳能路灯光伏电池板同步驱动器 |
| CN104791695A (zh) * | 2015-04-13 | 2015-07-22 | 长治市澳瑞特欣鑫健身器材有限公司 | 太阳能路灯 |
| CN108663926A (zh) * | 2018-05-13 | 2018-10-16 | 林碧琴 | 一种定时鸣叫提醒装置 |
| CN208401774U (zh) * | 2018-06-06 | 2019-01-18 | 东莞市天利太阳能有限公司 | 一种基于远程管理的迎光式太阳能发电装置 |
| CN110061689A (zh) * | 2019-05-21 | 2019-07-26 | 陆永成 | 自动逐日太阳能发电系统 |
| CN110138326A (zh) * | 2019-05-28 | 2019-08-16 | 沈阳工业大学 | 一种新型双轴光伏跟踪器 |
| CN110190804A (zh) * | 2019-05-16 | 2019-08-30 | 宁波欧达光电有限公司 | 一种太阳能电池板角度调节装置 |
| WO2019194471A1 (ko) * | 2018-04-02 | 2019-10-10 | 정양전 | 태양전지패널용 태양광 추적장치 |
| US20190326847A1 (en) * | 2018-04-23 | 2019-10-24 | Solar Foundations Usa, Inc. | Integrated bonding mid clamp device, system, and method for solar panel mounting and grounding |
| CN209545517U (zh) * | 2019-04-24 | 2019-10-25 | 河北一航新能源科技有限公司 | 具有光线追踪功能的太阳能充电装置 |
| CN209543150U (zh) * | 2019-01-29 | 2019-10-25 | 石家庄鹰眼科技有限公司 | 一种追踪型太阳能光伏发电装置 |
| CN110466795A (zh) * | 2019-08-22 | 2019-11-19 | 上海工程技术大学 | 一种航空运输的移动式行李运载装置 |
-
2019
- 2019-11-20 CN CN201911140226.0A patent/CN110689795B/zh active Active
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN201742343U (zh) * | 2010-09-06 | 2011-02-09 | 南昌市常盈科技发展有限公司 | 太阳能路灯光伏电池板同步驱动器 |
| CN104791695A (zh) * | 2015-04-13 | 2015-07-22 | 长治市澳瑞特欣鑫健身器材有限公司 | 太阳能路灯 |
| WO2019194471A1 (ko) * | 2018-04-02 | 2019-10-10 | 정양전 | 태양전지패널용 태양광 추적장치 |
| US20190326847A1 (en) * | 2018-04-23 | 2019-10-24 | Solar Foundations Usa, Inc. | Integrated bonding mid clamp device, system, and method for solar panel mounting and grounding |
| CN108663926A (zh) * | 2018-05-13 | 2018-10-16 | 林碧琴 | 一种定时鸣叫提醒装置 |
| CN208401774U (zh) * | 2018-06-06 | 2019-01-18 | 东莞市天利太阳能有限公司 | 一种基于远程管理的迎光式太阳能发电装置 |
| CN209543150U (zh) * | 2019-01-29 | 2019-10-25 | 石家庄鹰眼科技有限公司 | 一种追踪型太阳能光伏发电装置 |
| CN209545517U (zh) * | 2019-04-24 | 2019-10-25 | 河北一航新能源科技有限公司 | 具有光线追踪功能的太阳能充电装置 |
| CN110190804A (zh) * | 2019-05-16 | 2019-08-30 | 宁波欧达光电有限公司 | 一种太阳能电池板角度调节装置 |
| CN110061689A (zh) * | 2019-05-21 | 2019-07-26 | 陆永成 | 自动逐日太阳能发电系统 |
| CN110138326A (zh) * | 2019-05-28 | 2019-08-16 | 沈阳工业大学 | 一种新型双轴光伏跟踪器 |
| CN110466795A (zh) * | 2019-08-22 | 2019-11-19 | 上海工程技术大学 | 一种航空运输的移动式行李运载装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111313816A (zh) * | 2020-03-03 | 2020-06-19 | 绍兴市慧融臻合新能源科技有限公司 | 一种基于光感原理可自动追踪太阳轨迹的光伏板支架结构 |
| CN111313816B (zh) * | 2020-03-03 | 2021-04-23 | 绍兴市慧融臻合新能源科技有限公司 | 一种基于光感原理可自动追踪太阳轨迹的光伏板支架结构 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN110689795B (zh) | 2021-04-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102269996A (zh) | 太阳光对应装置 | |
| CN110689795B (zh) | 一种运输路线规划模拟装置 | |
| CN206595954U (zh) | 一种用于太阳能汽车的可调节车顶太阳能装置 | |
| CN201717805U (zh) | 太阳能三维自动跟踪装置 | |
| CN201063558Y (zh) | 一种光叠加式太阳能供电装置 | |
| CN105406806B (zh) | 具备自适应光伏跟踪性能的漂浮型光伏发电系统 | |
| CN103092215B (zh) | 双轴跟踪太阳位置装置及其预测扰动控制方法 | |
| CN204704762U (zh) | 一种改进型自动太阳能跟踪路灯 | |
| KR102108156B1 (ko) | 이중 액추에이터를 이용한 동적 태양광 패널 가로등 | |
| KR102081144B1 (ko) | 일체형 태양광 가로등의 발전 및 전력 공급 향상 시스템 | |
| CN2692591Y (zh) | 一种具有自动跟踪功能的太阳能发电器 | |
| CN111158403A (zh) | 一种光伏组件追日发电方法和装置 | |
| CN201096303Y (zh) | 太阳能路灯自动跟踪装置 | |
| CN108988762A (zh) | 一种跟踪式光伏支架控制系统及其控制方法 | |
| CN105337559A (zh) | 一种组合式太阳能板 | |
| CN100554817C (zh) | 轨道计算太阳自动精确跟踪装置 | |
| CN205195645U (zh) | 具备自适应光伏跟踪性能的漂浮型光伏发电系统 | |
| KR20200005351A (ko) | 하천의 전기시스템 | |
| CN205142102U (zh) | 一种跟踪式太阳能板 | |
| CN202033667U (zh) | 一种太阳光追踪装置 | |
| CN204086994U (zh) | 斜单轴太阳能追日光伏发电系统 | |
| CN208204845U (zh) | 一种模块化设计的太阳能路灯 | |
| CN205227168U (zh) | 一种利用太阳能和地下水流能发电的照明装置 | |
| CN104506128B (zh) | 一种可调节的坐地式弧形低倍太阳能聚光器及其聚光方法 | |
| CN106054937A (zh) | 一种太阳能电池板光线高度角自动跟随系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| EE01 | Entry into force of recordation of patent licensing contract | ||
| EE01 | Entry into force of recordation of patent licensing contract |
Application publication date: 20200114 Assignee: Changchun Minxue Education Technology Co.,Ltd. Assignor: HEIHE University Contract record no.: X2021980006347 Denomination of invention: A simulation device for transportation route planning Granted publication date: 20210420 License type: Exclusive License Record date: 20210719 |