CN110448382B - 用于致动器控制的外科手术器械的指示器机构 - Google Patents
用于致动器控制的外科手术器械的指示器机构 Download PDFInfo
- Publication number
- CN110448382B CN110448382B CN201910766785.6A CN201910766785A CN110448382B CN 110448382 B CN110448382 B CN 110448382B CN 201910766785 A CN201910766785 A CN 201910766785A CN 110448382 B CN110448382 B CN 110448382B
- Authority
- CN
- China
- Prior art keywords
- surgical instrument
- cylinder
- region
- indicator
- aperture
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images














Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/08—Accessories or related features not otherwise provided for
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Master-slave robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00477—Coupling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/08—Accessories or related features not otherwise provided for
- A61B2090/0803—Counting the number of times an instrument is used
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/08—Accessories or related features not otherwise provided for
- A61B2090/0807—Indication means
Abstract
本发明涉及用于致动器控制的外科手术器械的指示器机构。一种用于外科手术器械的指示器机构包括固定至底座的孔。指示器本体由底座可旋转地支撑。指示器本体包括用于接合使指示器本体旋转的电机的特征。透过该孔可见的视觉指示器联接至该指示器本体。止动机构将指示器本体保持在两个位置中的一个位置上。两个位置中的第一位置提供外科手术器械在工作的视觉指示,而两个位置中的第二位置提供外科手术器械过期的视觉指示。控制器可追踪外科手术器械的使用事件以确定过期。使用事件可包括除外科手术器械中发生的以外的操作和状况。当控制器追踪的使用事件指示过期时,控制器可旋转电机来将视觉指示设定为过期。
Description
本发明是申请日为2015年3月17日、发明名称为“用于致动器控制的外科手术器械的指示器机构”的中国专利申请No.201580012933.5(PCT/US2015/020870)的分案申请。
相关申请的交叉引用
本申请涉及2014年3月17日提交的标题为“INDICATOR MECHANISM FOR A SERVOACTUATED SURGICAL INSTRUMENT”的美国临时申请号61/954,453和2014年6月13日提交的标题为“INDICATOR MECHANISM FOR AN ACTUATOR CONTROLLED SURGICAL INSTRUMENT”的美国临时申请号62/012,018且要求保护其优先权,每个申请通过引用整体并入本文且用于所有目的。
技术领域
本发明的实施例涉及指示器领域;且更具体地涉及显示用于致动器控制的外科手术器械的两个状态中的至少一个状态的非可重置指示器。
背景技术
微创外科手术(MIS)(例如,内窥镜检查、腹腔镜检查、胸腔镜检查、膀胱镜检查等等)允许使用被引入至内部手术部位的细长外科手术器械通过小切口对患者进行手术。通常,套管通过切口插入以提供外科手术器械的进入端口。外科手术部位通常包括体腔,诸如患者的腹腔。体腔可能可选地使用诸如吹入气体的透明流体而膨胀。在传统的微创外科手术中,外科医生当在视频监视器上观看外科手术部位的同时通过使用细长外科手术器械的手动末端执行器来操纵组织。
细长外科手术器械将通常在细长管的一端具有外科手术工具(诸如钳子、剪刀、夹子、持针器等等)形式的末端执行器。外科手术器械通常通过一个或多个铰接区段联接至细长管以控制外科手术器械的位置和/或定向。提供致动力以控制铰接区段的致动器联接至细长管的另一端。将致动器力联接至铰接区段的装置延伸穿过细长管。两个致动器可被提供用于控制两个铰接区段,诸如定位外科手术工具的“臂”和定向并且操纵外科手术工具的“腕”,其中,用于联接两个致动器力的装置延伸穿过细长管。
可能期望细长管在某种程度上是挠性的以允许外科手术器械适于外科手术进入路径的几何形状。在一些情况下,铰接区段提供至不直接与手术进入端口成一直线的手术部位的入口。因为电缆提供的挠性以及因为电缆通过小横截面传输大的力、大的距离的能力,所以可能期望使用电缆作为将致动器力联接至铰接区段的手段。
电缆可接近它们的最大容许负载操作以最小化电缆的横截面和因此细长管的横截面。出于这个和其它原因,这种类型的外科手术器械的使用次数可能受限。
鉴于上述内容,期望提供一种指示器,该指示器能够显示外科手术器械已过期并且应从库存中移除。
发明内容
一种用于外科手术器械的指示器机构包括固定至底座的孔。指示器本体由底座可旋转地支撑。指示器本体包括用于接合使指示器本体旋转的电机的特征。透过该孔可见的视觉指示器联接至该指示器本体。止动机构将指示器本体保持在两个位置中的一个位置上。两个位置中的第一位置提供外科手术器械在工作的视觉指示,而两个位置中的第二位置提供外科手术器械过期的视觉指示。控制器可追踪外科手术器械的使用事件以确定过期。使用事件可包括除外科手术器械中发生的以外的操作和状况。当控制器追踪的使用事件指示过期时,控制器可旋转电机来将视觉指示设定为过期。
本发明的其它特征和优点将从附图和以下详细说明中变得清楚。
附图说明
通过参考用于举例而非限制地说明本发明的实施例的以下说明和附图可以最佳地理解本发明。在其中相同参考标号指示类似元件的附图中:
图1是具有通过患者腹腔中的端口插入的致动器控制的外科手术器械的远程操作的外科手术系统的简化透视图。
图2是用于与致动器联用的外科手术器械的平面图。
图3是图2中所示的外科手术器械的近端控制机构240的详图视图。
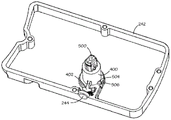
图4是图3中所示的、外壳被移除的近端控制机构的视图。
图5是图4中所示的近端控制机构的透视图。
图6是近端控制机构的分解图。
图7是处于第一操作位置上的指示器机构的平面图。
图8是处于第二操作位置上的指示器机构的平面图。
图9是指示器机构在第一操作位置与第二操作位置之间转变时的平面图。
图10是沿着图7中的线10-10截取的圆筒的横截面图。
图11是键接轴和圆盘的透视图。
图12是另一个键接轴和圆盘的透视图。
图13是又一个键接轴和圆盘的透视图。
图14A和图14B是指示器机构的另一个实施例的两侧的透视图。
图15是示出了可与外科手术器械联用的控制系统的框图,其包括用于显示外科手术器械的过期视觉指示的机构。
图16是可通过用于提供外科手术器械1530是否过期的视觉指示的控制器执行的方法的流程图。
具体实施方式
在以下说明中,阐述了许多特定细节。然而,应理解,本发明的实施例可在没有这些特定细节的情况下实践。在其它情形中,未详细示出众所周知的电路、结构和技术以免模糊对本说明的理解。
在以下说明中,参考展示了本发明的若干个实施例的附图。应理解,可利用其它实施例,且可在不脱离本披露的精神和范围的情况下进行机械组成、结构、电气和操作变化。以下详细说明不应被视为限制意义,且本发明的实施例的范围仅由所颁发专利的权利要求书限定。
在此使用的术语仅用于描述具体实施例而不旨在限制本发明。空间相对术语,诸如“下面”、“下方”、“下部”、“上方”、“上部”等等可为了方便说明而用于描述图中所展示的一个元件或特征与另一个元件或特征的关系。应理解,空间相对术语旨在涵盖使用或操作中的装置的除图中描绘的定向外的不同定向。例如,如果图中的装置被翻过来,那么被描述为在其它元件或特征“下方”或“下面”的元件将定向为在其它元件或特征“上方”。因此,示例性术语“下方”可涵盖上方和下方的定向。装置可以以其它方式定向(例如,旋转90°或以其它定向),且相应地解释在此使用的空间相对描述词。
如在此使用的,单数形式“一个”、“一”和“该”旨在也包括复数形式,除非上下文另有指示。应进一步理解,术语“包括(comprises)”和/或“包括(comprising)”指定所述特征、步骤、操作、元件和/或部件的存在,而不排除一个或更多其它特征、步骤、操作、元件、部件和/或其组的存在或添加。
图1是根据本发明的实施例的遥控外科手术系统的说明性床旁部分100的视图。床旁部分100包括支撑组件110和在每个支撑组件的末端处的一个或更多外科手术器械操纵器112。支撑组件可选地包括用于相对于手术患者定位外科手术器械操纵器112的一个或多个无动力、可锁定装配接头。如所描绘的,床旁部分100搁置在地板上。在另一些实施例中,床旁部分可安装至墙上、天花板上、也支撑患者的身体122的手术台126上或其它手术室设备上。进一步地,虽然床旁部分100显示包括四个操纵器112,但是可使用更多或更少操纵器112。更进一步地,床旁部分100可由如所示的单个组件组成,或它可包括两个或更多单独组件,每个组件可选地以各种可能方式被安装。
每个外科手术器械操纵器112支撑在患者身体122内的外科手术部位处操作的一个或多个外科手术器械120。可以允以许相关外科手术器械以一个或多个机械自由度(例如,所有六个笛卡儿自由度、五个或更少笛卡儿自由度等)移动的各种形式提供每个操纵器112。通常,机械或控制约束限制每个操纵器112绕相对于患者保持静止的器械上的运动中心移动它的相关外科手术器械,且这个运动中心通常定位在器械进入身体的位置处。
术语“外科手术器械”在此用于描述被构造成被插入至患者的身体中且用于执行外科手术或诊断程序的医疗装置。外科手术器械通常包括与一个或多个外科手术任务相关联的末端执行器,诸如钳子、持针器、剪刀、双极烧灼器、组织稳定器或牵开器、施夹器、吻合装置、成像装置(例如,内窥镜或超声波探头)等等。本发明的实施例使用的一些外科手术器械进一步提供用于末端执行器的铰接支撑件(有时称作“腕”),使得能够相对于器械的轴以一个或多个机械自由度来操纵末端执行器的位置和定向。进一步地,许多外科手术末端执行器包括功能性机械自由度,诸如打开或闭合的钳口或沿着路径平移的刀子。外科手术器械也可以包含可能永久或可能可由外科手术系统更新的存储(例如,在器械内的半导体存储器上)信息。相应地,该系统可提供器械与一个或多个系统部件之间的单向或双向信息通信。
功能性遥控外科手术系统将通常包括使操作者能够从患者的身体122外观看外科手术部位的视觉系统部分(未示出)。该视觉系统通常包括具有视频图像捕获功能128(“摄像机器械”)和用于显示所捕获的图像的一个或多个视频显示器的外科手术器械。在一些手术系统构型中,摄像机器械128包括将图像从摄像机器械128的远端传递至患者的身体122外的一个或多个成像传感器(例如,CCD或CMOS传感器)的光学器件。可替代地,成像传感器可定位在摄像机器械128的远端处,且由传感器产生的信号可沿着引线或无线地传输用于处理并显示在视频显示器上。说明性视频显示器是由加利福尼亚州森尼维耳市的直观外科手术公司(Intuitive Surgical,Inc.)销售的外科手术系统中的外科医生控制台上的立体显示器。
功能性遥控外科手术系统将进一步包括用于在器械处于患者体内的同时控制外科手术器械120的移动的控制系统部分(未示出)。该控制系统部分可在外科手术系统中的单个位置处或它可分布在系统中的两个或更多位置处(例如,控制系统部分部件可在系统的床旁部分100中、在专用系统控制台或在单独的设备机架中)。遥控的主/从控制可依据期望的控制程度、被控制的外科手术组件的大小和其它因素以多种方式完成。在一些实施例中,控制系统部分包括一个或多个手动操作的输入装置,诸如控制杆、外骨架手套、动力和重力补偿操纵器等等。这些输入装置控制遥控电机,该遥控电机进而控制外科手术器械的移动。
由遥控电机产生的力经由传动系机构传递,所述传动系机构将力从遥控电机传输至外科手术器械120。在一些远程外科手术实施例中,控制操纵器的输入装置可设置在远离患者的位置,在患者所处的房间内或外。来自输入装置的输入信号接着被传输至控制系统部分。熟悉远程操纵、遥控和远程呈现外科手术的人将了解这种系统和及其部件,诸如由直观外科手术公司销售的达芬奇(da )外科手术系统和由最初由计算机动画公司(Computer Motion,Inc.)制造的
)外科手术系统和由最初由计算机动画公司(Computer Motion,Inc.)制造的 外科手术系统和这些系统的各种说明性部件。
外科手术系统和这些系统的各种说明性部件。
如所示,外科手术器械120和可选的导入件124(例如,患者腹腔中的套管)可移除地联接至操纵器112的远端,其中外科手术器械120被插入通过导入件124。操纵器112中的遥控致动器将外科手术器械120整体移动。操纵器112进一步包括器械滑动架130。外科手术器械120可拆卸地连接至滑动架130。容纳在滑动架130中的遥控致动器提供多种控制器运动,外科手术器械120将其转化为外科手术器械上的末端执行器的各种移动。因此,滑动架130中的遥控致动器仅移动外科手术器械120的一个或多个部件而非器械整体。用于控制器械整体或器械的部件的输入使得由外科医生提供至控制系统部分的输入(“主”命令)被转化为外科手术器械的对应动作(“从”响应)。
图2是外科手术器械120的说明性实施例的侧视图,其包括由细长管210联接的远端部分250和近端控制机构240。外科手术器械120的远端部分250可提供任意多种末端执行器,诸如所示的钳子254、持针器、烧灼装置、切割工具、成像装置(例如,内窥镜或超声波探头)或包括两个或更多各种工具和成像装置的组合的组合装置。在所示实施例中,末端执行器254通过“腕”252联接至细长管210,该“腕”允许参照器械管210操纵末端执行器的定向。
本发明使用的遥控致动器控制的外科手术器械由多根挠性电缆控制。电缆提供紧凑且挠性的、用于将力传输至接头的装置。用于外科手术器械120的典型细长管210是小的,可能在直径上为6毫米,大致为大的苏打水吸管的直径。外科手术器械120中的机构的小规模导致了这些机构的构造的独特的机械状况和问题,所述状况和问题与在以较大规模构造的类似机构中存在的状况和问题不同,因为材料的力和强度未以与机构的大小相同的比率按比例缩放。电缆必须装配在细长管210内,且能够在它们穿过偏离外科手术工具262的接头252、254时弯曲。
电缆被绞合/编股以提供挠性。它们绕小直径的滑轮在高水平应力和弯曲度下操作。这些状况需要致动器控制的外科手术器械在一定使用次数后被停用/收回。致动器控制的外科手术器械具备视觉指示器244,该视觉指示器244可在外科手术器械达到额定使用次数时由致动器设定。这警告人员外科手术器械可能无法再使用,且因此不应被清洁且返回至库存。
外科手术器械可由外科手术系统识别且器械的使用可由系统追踪。视觉指示器244可由系统设定以协助人员处置致动器控制的外科手术器械。视觉指示器244设置可以或可以不由系统用于确定致动器控制的外科手术器械是否可用。外科手术器械可以或可以不追踪其已被使用的次数并且自主设定视觉指示器244。
图3是图2中所示的致动器控制的外科手术器械的近端控制机构240的详细视图。在这个视图中,可更清楚地看见视觉指示器244。展示了阴影指示来表明过期指示,诸如被示为视觉指示的红色。
图4是图3中所示的近端控制机构240的视图,其中外壳300被移除以示出指示器机构。指示器可包括可旋转指示器本体,诸如可旋转圆筒400,其可支撑指示器臂402。该指示器臂可提供透过孔可看见的区域以提供视觉指示器244。在另一些实施例中,透过孔可看见的区域可在指示器本体上而非在指示器臂上。如果指示器本体的旋转轴线与视觉指示器244的孔之间的距离使得单独使用指示器本体可能太笨重,那么使用指示器臂。
图5是图4中所示的近端控制机构240的透视图,其中,仅示出了指示器机构的部件。图6是更清楚示出指示器机构的某些方面的近端控制机构240的分解图。
可旋转圆筒400由近端控制机构的底座242支撑。键接轴500接合圆筒400以旋转圆筒。驱动圆盘610设置在从底座242的与支撑圆筒400的一侧相反的那侧延伸出来的键接轴500的末端处。圆筒固定至键接轴500,使得圆筒、轴和驱动圆盘提供在近端控制机构的底座242上的可旋转组件。
在图6中可看到通过视觉指示器244的孔可看见的区域。第一区域600提供器械仍在工作的视觉指示。第二区域602提供器械已过期的视觉指示。
图7、图8和图9是处于各种操作位置上的指示器机构的平面图。图7示出了处于第一位置上的圆筒400,其中第一区域600与视觉指示器244的孔对准以提供器械仍在工作的视觉指示,即,器械可至少再用一个工作周期。图8示出了处于第二位置上的圆筒400,其中第二区域602与视觉指示器244的孔对准以提供器械已过期的视觉指示,即,器械无法用于额外的工作周期。
期望圆筒400被保持在第一或第二位置上,使得视觉指示器244提供外科手术器械的清楚的状况指示。还期望圆筒被牢固地保持,使得视觉指示器244不会因处置而移动,所述处置可包括剧烈的清洁活动。在一些实施例中,视觉指示器可提供两个以上的位置,且在这些实施例中,可能期望将圆筒保持在这些额外位置上。
为了将圆筒400保持在第一或第二位置上,底座242包括止动器506、606,这些止动器接合圆筒的与底座相邻的下周边上的突出物504、704。如图9中图示,圆筒的下周边在突出物504、704旋转经过止动器506、606时弹性变形。虚线参考圆900示出了圆筒的未变形轮廓。为简明起见,整个圆筒已被示为变形。实际上,仅圆筒的下周边将如所示变形。
虽然止动机构已被示为两个干涉突出物,但是应理解,止动机构可以以其它形式提供。例如,由底座242上的刚性止动器506、606表示的止动机构的第一部分可提供为凹陷而非突出物。同样,由圆筒400上的弹性突出物504、704表示的止动机构的第二部分可提供为凹陷而非突出物。在另一些实施例中,由底座242支撑的止动机构的第一部分可为弹性的,而由圆筒400支撑的部分是刚性的。在另一些实施例中,止动机构可提供两个以上的保持位置。
图10是沿着图7中的线10-10截取的圆筒400的横截面图。这示出了圆筒400的裙边部分902,该裙边部分提供与圆筒的下周边相邻的薄区段,该薄区段可弹性变形以允许突出物504、704旋转经过止动器506、606。如所示,裙边部分902稍微高于突出物604,因为裙边部分的邻接圆筒的全厚度部分的上边缘相对无弹性。裙边部分902的厚度和高度可被选择成针对将圆筒从第一位置移动至第二位置提供期望阻力。
可注意到,突出物504、704具有在圆筒400处于第一位置上时抵靠止动器506、606的倾斜边缘和在圆筒处于第二位置上时抵靠止动器的直角边缘。因此,突出物提供棘齿,该棘齿允许圆筒从第一位置旋转至第二位置,且抵抗从第二位置至第一位置的旋转。
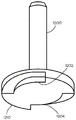
图11是可用于使指示器机构的圆筒400旋转的键接轴1100和圆盘1110的透视图。圆盘1110可包括接合对应突出物的凹陷1102、1104,这些突出物由电机驱动以将圆筒从第一位置旋转至第二位置以指示器械已过期。
图12是可用于使指示器机构的圆筒400旋转的另一个键接轴1200和圆盘1210的透视图。圆盘1210可包括接合对应突出物的凹陷1202、1204,这些突出物由电机驱动以将圆筒从第一位置旋转至第二位置以指示器械已过期。在本实施例中,每个凹陷的一侧提供斜坡部分。这种构型允许弹簧加载式突出物可靠地接合凹陷的直角侧,使得电机可用一些动量撞击直角侧以提供使圆筒400弹性变形所必须的力。电机可用低的力缓慢接合直角侧以建立直角侧的位置,并且接着在以高速撞击直角侧之前预备已知量。在另一个实施例中,电机控制器已知电机和直角侧的位置。电机控制器可定位电机以基于已知位置将接合突出物放置为远离直角侧。
图13是可用于使指示器机构的圆筒400旋转的又一个键接轴1300和圆盘1310的透视图。本实施例提供类似于图12中所示的斜坡凹陷1302、1304。然而,这些凹陷与轴1300和圆筒400的旋转轴线相距不同距离。这允许突出物在撞击凹陷的直角侧之前旋转几乎完整一周,其可允许更大的力被传递以将圆筒从第一位置旋转至第二位置从而指示器械已过期。
应理解,键接轴和圆盘可提供接合由电机驱动的对应凹陷驱动的突出物,且凹陷可具有类似于针对键接轴的圆盘部分所示的外形。
图14A和图14B示出了指示器机构的另一个实施例的两侧的透视图。本实施例提供圆盘1410形式的指示器本体和单件的指示器臂1404。该圆盘包括用于接合使圆盘旋转的电机的特征,诸如具有直角侧1412、1414的斜坡。指示器臂平行于圆盘的旋转轴线从圆盘的周边延伸出来。
轴1500从圆盘1410延伸出来。该轴被插入到图6中所看到的开口612中。钩特征1502在距离圆盘最远的一侧上接合近端控制机构的底座242的表面。轴1500上的突出物1504接合底座242上的止动器506、606并且如前所述操作。
额外开口被设置在近端控制机构的底座242中以允许指示器臂1404延伸至近端控制机构的内部。这允许通过视觉指示器244的孔看见的距离圆盘最远的指示器臂末端。指示器臂末端可装饰有两个视觉不同区域1400、1402以提供器械是否已过期的视觉指示。
在另一个实施例中,指示器臂在一个状态下(诸如当器械仍在工作时)通过视觉指示器244的孔可见。在第二状态下(诸如当器械已过期时),指示器臂无法通过视觉指示器244的孔可见。在第二状态下,在第一状态下被指示器臂挡住的底座上的视觉特征变得可见以提供第二状态的视觉指示。
图15是示出了外科手术器械1530可以使用的控制系统的框图,该外科手术器械包括用于显示外科手术器械过期的视觉指示的机构,如上所述,外科手术器械1530可联接至器械滑动架1520,该器械滑动架提供致动并控制外科手术器械的机械和/或电气输入1522。控制器1510可向器械滑动架1520提供输入1512(通常电气输入)以控制器械滑动架的操作。
外科手术器械1530可以提供用于指示外科手术器械处的状况的机械和/或电气输出1534。器械滑动架1520可以提供输出1524(通常是电气输出)以通过来自外科手术器械的输出1534和/或指示器械滑动架处的状况。控制器1510可以提供输出1514给使用者1500以提供外科手术器械1530和/或外科手术系统的各种状况的指示。
图16是可以通过用于提供外科手术器械1530是否过期的视觉指示的控制器1510执行的方法的流程图。外科手术器械1530包括任何上述类型的指示器机构。外科手术器械1530还包括允许控制器1510识别安装的具体外科手术器械的机构(诸如RFID标签)1600。外科手术器械1530的识别允许控制器保持具体外科手术器械的使用历史记录并且识别导致外科手术器械过期的使用类型和量。
控制器确定使用事件是否已发生1610-是。虽然流程图将使用事件的检测1610示为轮询循环,但是应理解,使用事件的发生可用于引导方法而无需轮询。
一些外科手术器械可以在用于预定次数的外科手术程序之后过期。对于这样的外科手术器械,使用事件可以是外科手术器械的安装。由于外科手术器械会在单次手术程序过程中被移除和再安装,所以使用事件可以是从外科手术器械的先前安装以来的预定时长后的外科手术器械的安装。使用事件还可以是从外科手术器械的先前安装以来已发生的系统动力循环之后的外科手术器械的安装。
另一些外科手术器械可以在外科手术器械的预定致动次数之后过期。例如,外科手术吻合器可允许预定次数的发射。外科手术剪刀可允许预定次数的闭合。对于这些外科手术器械,控制器将识别外科手术器械的适当致动作为使用事件。
当使用事件发生1610时-是,控制器1510将调整已被识别为安装1600的具体外科手术器械1530的使用计数1620。控制器1510接着将使用计数与预定过期计数进行比较以确定具体外科手术器械1530是否已过期1630。应理解,控制器可以累积使用计数并将它与预定过期计数比较,或它可将使用计数设定为预定过期计数,并递减使用计数使得使用计数的零值指示具体外科手术器械1530已过期1630。
当控制器1510确定具体外科手术器械1530已过期时1630-是,控制器提供输出1512至器械滑动架1520,该器械滑动架激活电机以将外科手术器械中的指示器本体从第一位置旋转至第二位置从而在外科手术器械上提供外科手术器械已过期的视觉指示。控制器1510可向器械滑动架1520发出使电机旋转的命令,其方式为允许电机在旋转指示器本体之前获得动量。这可使电机能够克服被提供来防止指示器本体意外旋转的机构的阻力。
应理解,可使用除被描述为实例的标准外的其它标准来识别使用事件。在一些情况下,使用事件使得完全容纳在外科手术器械中的机构不可能确定外科手术器械何时过期。在此描述的提供外科手术器械是否过期的视觉指示的方法允许考虑其它系统状况和事件来确定外科手术器械何时过期。
虽然已在附图中描述并且示出某些示例性实施例,但是应理解,这些实施例只是说明性的且非限制广泛的本发明,并且本发明不限于所示和所述的具体构造和配置,因为本领域的普通技术人员可想到各种其它修改。本说明因此被视为说明性的而非限制性的。
Claims (13)
1.一种用于外科手术器械的指示器机构,所述指示器机构包括:
包括孔的底座;
由所述底座可旋转地支撑的圆筒;
联接至所述圆筒的第一区域,所述第一区域在通过所述孔可见时指示所述外科手术器械仍在工作;
联接至所述圆筒的第二区域,所述第二区域在通过所述孔可见时指示所述外科手术器械过期;
联接至所述圆筒的键接轴,所述键接轴包括位于所述底座的与所述圆筒相反的侧面上的驱动圆盘以旋转所述圆筒;以及
止动机构,其被配置为保持所述圆筒使得所述第一区域或所述第二区域中的一者从所述外科手术器械外部通过所述孔是可见的。
2.根据权利要求1所述的指示器机构,其中,所述止动机构还包括联接至所述圆筒的弹性裙边部分,并且突出物被联接至所述弹性裙边部分。
3.根据权利要求2所述的指示器机构,其中,所述止动机构还包括固定至所述底座的接合所述突出物的部分。
4.根据权利要求1所述的指示器机构,其中,所述止动机构包括棘齿,所述棘齿允许所述圆筒从第一位置旋转至第二位置并且抵抗所述圆筒从所述第二位置至所述第一位置的旋转。
5.根据权利要求1-4中任一项所述的指示器机构,其还包括将所述第一区域和所述第二区域联接至所述圆筒的指示器臂。
6.根据权利要求1-4中任一项所述的指示器机构,其中,所述驱动圆盘包括用于接合电机的斜坡部分。
7.根据权利要求1-4中任一项所述的指示器机构,其中,所述止动机构保持所述圆筒,使得恰好所述第一区域或所述第二区域中的一者可见。
8.一种用于提供外科手术器械是否过期的视觉指示的方法,所述方法包括:
提供圆筒,所述圆筒由所述外科手术器械的底座可旋转地支撑,所述底座包括孔;
提供联接到所述圆筒的第一区域,所述第一区域在通过所述孔可见时指示所述外科手术器械仍在工作;
提供联接至所述圆筒的第二区域,所述第二区域在通过所述孔可见时指示所述外科手术器械过期;
利用位于所述底座的与所述圆筒相反的侧面上的驱动圆盘旋转所述圆筒,所述驱动圆盘通过键接轴联接至所述圆筒;并且
利用止动机构保持所述圆筒,使得所述第一区域或所述第二区域中的一者从所述外科手术器械外部通过所述孔是可见的。
9.根据权利要求8所述的方法,其还包括:
确定使用事件是否已发生;
在确定使用事件是否已发生的动作确定使用事件已发生的情况下,调整所述外科手术器械的使用事件的计数以产生经调整的使用事件的计数;
基于所述经调整的使用事件的计数,确定所述外科手术器械是否过期;并且
在确定所述外科手术器械是否过期的动作确定所述外科手术器械过期的情况下,旋转所述圆筒。
10.根据权利要求9所述的方法,其中,确定使用事件是否已发生还包括:确定自所述外科手术器械先前被致动以来是否已经过去超过预定时间长度。
11.根据权利要求9所述的方法,其中,确定使用事件是否已发生还包括:确定自所述外科手术器械先前被致动以来是否已发生系统动力循环。
12.根据权利要求9所述的方法,其中,确定使用事件是否已发生还包括:确定所述外科手术器械是否已被致动。
13.根据权利要求8-12中任一项所述的方法,其还包括在旋转所述圆筒之前旋转电机以获得动量。
Applications Claiming Priority (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201461954453P | 2014-03-17 | 2014-03-17 | |
| US61/954,453 | 2014-03-17 | ||
| US201462012081P | 2014-06-13 | 2014-06-13 | |
| US62/012,081 | 2014-06-13 | ||
| PCT/US2015/020870 WO2015142780A1 (en) | 2014-03-17 | 2015-03-17 | Indicator mechanism for an actuator controlled surgical instrument |
| CN201580012933.5A CN106102637B (zh) | 2014-03-17 | 2015-03-17 | 用于致动器控制的外科手术器械的指示器机构 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201580012933.5A Division CN106102637B (zh) | 2014-03-17 | 2015-03-17 | 用于致动器控制的外科手术器械的指示器机构 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN110448382A CN110448382A (zh) | 2019-11-15 |
| CN110448382B true CN110448382B (zh) | 2022-09-27 |
Family
ID=54145186
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201910766785.6A Active CN110448382B (zh) | 2014-03-17 | 2015-03-17 | 用于致动器控制的外科手术器械的指示器机构 |
| CN201580012933.5A Active CN106102637B (zh) | 2014-03-17 | 2015-03-17 | 用于致动器控制的外科手术器械的指示器机构 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201580012933.5A Active CN106102637B (zh) | 2014-03-17 | 2015-03-17 | 用于致动器控制的外科手术器械的指示器机构 |
Country Status (6)
| Country | Link |
|---|---|
| US (3) | US10470829B2 (zh) |
| EP (2) | EP3119330B1 (zh) |
| JP (3) | JP6869723B2 (zh) |
| KR (2) | KR20160135222A (zh) |
| CN (2) | CN110448382B (zh) |
| WO (1) | WO2015142780A1 (zh) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110448382B (zh) * | 2014-03-17 | 2022-09-27 | 直观外科手术操作公司 | 用于致动器控制的外科手术器械的指示器机构 |
| EP3538010A4 (en) * | 2016-11-11 | 2020-07-22 | Intuitive Surgical Operations Inc. | REMOTE-CONTROLLED SURGICAL SYSTEM FOR MONITORING SURGICAL INSTRUMENT WEAR |
| KR20230163594A (ko) * | 2017-08-10 | 2023-11-30 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 원격 수술 시스템에서 사용 가능한 기구 수명 증가 |
| EP4125698A1 (en) | 2020-04-02 | 2023-02-08 | Intuitive Surgical Operations, Inc. | Devices for instrument use recording, devices for recording instrument reprocessing events, and related systems and methods |
| CN114176668B (zh) * | 2021-12-31 | 2023-08-22 | 佗道医疗科技有限公司 | 手术器械使用情况的指示机构、使用方法及手术器械防伪方法 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008067143A2 (en) * | 2006-11-30 | 2008-06-05 | Gregory Lee Heacock | Disposable ophthalmic/medical apparatus with timed color change indication |
| EP2484304A2 (en) * | 2011-02-03 | 2012-08-08 | Terumo Kabushiki Kaisha | Medical manipulator system |
Family Cites Families (53)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB733148A (en) * | 1951-07-19 | 1955-07-06 | Arthur Rex Jackson | Improvements in charts or indicators |
| US4606343A (en) * | 1980-08-18 | 1986-08-19 | United States Surgical Corporation | Self-powered surgical fastening instrument |
| DE3204522A1 (de) * | 1982-02-10 | 1983-08-25 | B. Braun Melsungen Ag, 3508 Melsungen | Chirurgisches hautklammergeraet |
| US4619391A (en) * | 1984-04-18 | 1986-10-28 | Acme United Corporation | Surgical stapling instrument |
| US4951860A (en) * | 1987-12-28 | 1990-08-28 | Edward Weck & Co. | Method and apparatus for storing, dispensing and applying surgical staples |
| US5359993A (en) * | 1992-12-31 | 1994-11-01 | Symbiosis Corporation | Apparatus for counting the number of times a medical instrument has been used |
| US5279309A (en) * | 1991-06-13 | 1994-01-18 | International Business Machines Corporation | Signaling device and method for monitoring positions in a surgical operation |
| US5397046A (en) * | 1991-10-18 | 1995-03-14 | United States Surgical Corporation | Lockout mechanism for surgical apparatus |
| US5397323A (en) * | 1992-10-30 | 1995-03-14 | International Business Machines Corporation | Remote center-of-motion robot for surgery |
| US5313935A (en) | 1992-12-31 | 1994-05-24 | Symbiosis Corporation | Apparatus for counting the number of times a surgical instrument has been used |
| JPH08248838A (ja) * | 1995-03-11 | 1996-09-27 | Ricoh Co Ltd | 画像形成装置 |
| GB9518402D0 (en) * | 1995-09-08 | 1995-11-08 | Armstrong Projects Ltd | Improvements in or relating to a robotic apparatus |
| US6786896B1 (en) * | 1997-09-19 | 2004-09-07 | Massachusetts Institute Of Technology | Robotic apparatus |
| US6331181B1 (en) * | 1998-12-08 | 2001-12-18 | Intuitive Surgical, Inc. | Surgical robotic tools, data architecture, and use |
| SE9702679D0 (sv) * | 1997-07-11 | 1997-07-11 | Siemens Elema Ab | Anordning för att räkna antalet användningar av en givare |
| US6468265B1 (en) * | 1998-11-20 | 2002-10-22 | Intuitive Surgical, Inc. | Performing cardiac surgery without cardioplegia |
| US10285694B2 (en) * | 2001-10-20 | 2019-05-14 | Covidien Lp | Surgical stapler with timer and feedback display |
| US6601748B1 (en) * | 2001-12-15 | 2003-08-05 | Modern Medical Equip. Mfg., Ltd. | Surgical stapler |
| AU2003207811A1 (en) * | 2002-02-15 | 2003-09-09 | The John Hopkins University | System and method for laser based computed tomography and magnetic resonance registration |
| US7621273B2 (en) * | 2003-10-28 | 2009-11-24 | Trudell Medical International | Indicating device with warning dosage indicator |
| JP2006081687A (ja) * | 2004-09-15 | 2006-03-30 | Max Co Ltd | 医療用ステープラ |
| JP4708830B2 (ja) * | 2005-04-06 | 2011-06-22 | キヤノン株式会社 | ユニット及び画像形成装置 |
| EP3738521B1 (en) * | 2005-06-03 | 2023-10-18 | Covidien LP | Surgical stapler with timer and feedback display |
| KR101298492B1 (ko) * | 2005-06-30 | 2013-08-21 | 인튜어티브 서지컬 인코포레이티드 | 멀티암 로보트 원격 외과수술에서 툴 상태에 대한인디케이터와 통신 |
| US8241271B2 (en) * | 2005-06-30 | 2012-08-14 | Intuitive Surgical Operations, Inc. | Robotic surgical instruments with a fluid flow control system for irrigation, aspiration, and blowing |
| US7741802B2 (en) * | 2005-12-20 | 2010-06-22 | Intuitive Surgical Operations, Inc. | Medical robotic system with programmably controlled constraints on error dynamics |
| US7835823B2 (en) * | 2006-01-05 | 2010-11-16 | Intuitive Surgical Operations, Inc. | Method for tracking and reporting usage events to determine when preventive maintenance is due for a medical robotic system |
| US8708213B2 (en) * | 2006-01-31 | 2014-04-29 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a feedback system |
| JP5085996B2 (ja) * | 2006-10-25 | 2012-11-28 | テルモ株式会社 | マニピュレータシステム |
| US7882509B2 (en) * | 2007-06-29 | 2011-02-01 | Emulex Design & Manufacturing Corporation | Expander-based solution to the dynamic STP address problem |
| US7739978B2 (en) * | 2007-09-18 | 2010-06-22 | Metso Automation Usa Inc. | Rotatable shaft position indicator |
| US7658162B2 (en) * | 2008-01-15 | 2010-02-09 | Ace Venture, Inc. | Self adhesive medication reminder device |
| CN201281819Y (zh) * | 2008-09-12 | 2009-07-29 | Abb技术公司 | 适于操作机器人单元的示教单元 |
| US8939894B2 (en) * | 2009-03-31 | 2015-01-27 | Intuitive Surgical Operations, Inc. | Three-dimensional target devices, assemblies and methods for calibrating an endoscopic camera |
| US9186136B2 (en) * | 2009-12-09 | 2015-11-17 | Covidien Lp | Surgical clip applier |
| US20120006252A1 (en) * | 2010-01-04 | 2012-01-12 | Kam Eileen Warner | Indicator |
| JP2013517068A (ja) * | 2010-01-14 | 2013-05-16 | ザ リージェンツ オブ ザ ユニバーシティ オブ カリフォルニア | ロボット顕微手術のための装置、システムおよび方法 |
| EP2408174A1 (en) * | 2010-07-14 | 2012-01-18 | Deutsche Telekom AG | Messaging activity feed |
| JP5734631B2 (ja) * | 2010-12-02 | 2015-06-17 | オリンパス株式会社 | 手術支援システム |
| JP5830258B2 (ja) * | 2011-03-17 | 2015-12-09 | オリンパス株式会社 | 手術支援システム及び術具 |
| US20130253480A1 (en) * | 2012-03-22 | 2013-09-26 | Cory G. Kimball | Surgical instrument usage data management |
| US9364278B2 (en) * | 2012-04-30 | 2016-06-14 | Covidien Lp | Limited reuse ablation needles and ablation devices for use therewith |
| CA2875594C (en) * | 2012-06-05 | 2019-09-24 | Optimized Ortho Pty Ltd | A method, guide, guide indicia generation means, computer readable storage medium, reference marker and impactor for aligning an implant |
| KR20140090374A (ko) * | 2013-01-08 | 2014-07-17 | 삼성전자주식회사 | 싱글 포트 수술 로봇 및 그 제어 방법 |
| US9782198B2 (en) * | 2013-03-28 | 2017-10-10 | Koninklijke Philips N.V. | Localization of robotic remote center of motion point using custom trocar |
| US9398935B2 (en) * | 2013-08-22 | 2016-07-26 | The Board Of Trustees Of The Leland Stanford Junior University | Robotic imaging system |
| CN105979902A (zh) * | 2014-02-04 | 2016-09-28 | 皇家飞利浦有限公司 | 用于机器人系统的使用光源的远程运动中心定义 |
| WO2015121765A1 (en) * | 2014-02-12 | 2015-08-20 | Koninklijke Philips N.V. | Robotic control of surgical instrument visibility |
| KR102237597B1 (ko) * | 2014-02-18 | 2021-04-07 | 삼성전자주식회사 | 수술 로봇용 마스터 장치 및 그 제어 방법 |
| CN110448382B (zh) * | 2014-03-17 | 2022-09-27 | 直观外科手术操作公司 | 用于致动器控制的外科手术器械的指示器机构 |
| US20150338728A1 (en) * | 2014-05-23 | 2015-11-26 | Thought Development, Inc. | System and method for continuously projecting a reference aid at an activity site |
| EP3169491A2 (en) * | 2014-07-15 | 2017-05-24 | Koninklijke Philips N.V. | Reconfigurable robot architecture for minimally invasive procedures |
| EP4125698A1 (en) * | 2020-04-02 | 2023-02-08 | Intuitive Surgical Operations, Inc. | Devices for instrument use recording, devices for recording instrument reprocessing events, and related systems and methods |
-
2015
- 2015-03-17 CN CN201910766785.6A patent/CN110448382B/zh active Active
- 2015-03-17 CN CN201580012933.5A patent/CN106102637B/zh active Active
- 2015-03-17 US US15/121,366 patent/US10470829B2/en active Active
- 2015-03-17 WO PCT/US2015/020870 patent/WO2015142780A1/en active Application Filing
- 2015-03-17 JP JP2016557995A patent/JP6869723B2/ja active Active
- 2015-03-17 EP EP15765163.9A patent/EP3119330B1/en active Active
- 2015-03-17 EP EP19212146.5A patent/EP3632364B1/en active Active
- 2015-03-17 KR KR1020167026690A patent/KR20160135222A/ko not_active IP Right Cessation
- 2015-03-17 KR KR1020227027793A patent/KR102560873B1/ko active IP Right Grant
-
2019
- 2019-11-08 JP JP2019202823A patent/JP7000399B2/ja active Active
- 2019-11-11 US US16/680,194 patent/US11344378B2/en active Active
-
2021
- 2021-09-24 JP JP2021155928A patent/JP7296435B2/ja active Active
-
2022
- 2022-04-22 US US17/726,773 patent/US20220354598A1/en active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008067143A2 (en) * | 2006-11-30 | 2008-06-05 | Gregory Lee Heacock | Disposable ophthalmic/medical apparatus with timed color change indication |
| EP2484304A2 (en) * | 2011-02-03 | 2012-08-08 | Terumo Kabushiki Kaisha | Medical manipulator system |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6869723B2 (ja) | 2021-05-12 |
| EP3632364B1 (en) | 2021-09-01 |
| US11344378B2 (en) | 2022-05-31 |
| US20220354598A1 (en) | 2022-11-10 |
| CN110448382A (zh) | 2019-11-15 |
| EP3119330A4 (en) | 2017-11-08 |
| JP2022002723A (ja) | 2022-01-11 |
| US20160361048A1 (en) | 2016-12-15 |
| CN106102637B (zh) | 2019-09-13 |
| JP2017512558A (ja) | 2017-05-25 |
| KR20220119174A (ko) | 2022-08-26 |
| JP7000399B2 (ja) | 2022-01-19 |
| CN106102637A (zh) | 2016-11-09 |
| WO2015142780A1 (en) | 2015-09-24 |
| EP3632364A1 (en) | 2020-04-08 |
| EP3119330A1 (en) | 2017-01-25 |
| KR20160135222A (ko) | 2016-11-25 |
| US10470829B2 (en) | 2019-11-12 |
| JP2020018929A (ja) | 2020-02-06 |
| KR102560873B1 (ko) | 2023-07-31 |
| EP3119330B1 (en) | 2020-05-06 |
| US20200078107A1 (en) | 2020-03-12 |
| JP7296435B2 (ja) | 2023-06-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11259883B2 (en) | Robotics tool exchange | |
| JP7296435B2 (ja) | アクチュエータ制御手術器具のための表示機構 | |
| JP7240454B2 (ja) | 遠隔操作アクチュエータから手術器具に運動を移転する連結器 | |
| US20190216554A1 (en) | Sterile adapter assembly for a robotic surgical system | |
| CN113271884A (zh) | 用于与成像设备集成运动的系统和方法 | |
| US20220117680A1 (en) | System and method for automated docking |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |